This paper studies the fault estimation problem for a class of discrete-time nonlinear systems subject to time-variant coefficient matrices, online available input, and exogenous disturbances. By assuming that the concerned nonlinearity is continuously differentiable and by using Taylor series expansions, the dynamic system is transferred as a linear time-variant system with modeling uncertainties. A non-conservative but nominal system and its corresponding indefinite quadratic performance function are, respectively, given in place of the transferred uncertain system and the conventional performance metric, such that the estimation problem is converted as a two-stage optimization issue. By introducing an auxiliary model in Krein space, the so-called orthogonal projection technique is utilized to search an appropriate choice serving as the estimation of the fault signal. A necessary and sufficient condition on the existence of the fault estimator is given, and a recursive algorithm for computing the gain matrix of the estimator is proposed. The addressed method is applied to an indoor robot localization system to show its effectiveness.
When sketching the works on model-based fault diagnosis (including fault detection, fault isolation, and fault estimation) from 1970s of the last century, different kinds of optimization techniques for robust control have been widely used in this area, which lead to the so-called robust fault diagnosis, for example, see previous works1–6 and the references therein. The core idea behind model-based robust fault diagnosis is to construct a residual signal that prominently indicates whether a fault occurs in the system, but simultaneously reduces the effects from modeling uncertainties and exogenous disturbances/unknown inputs to this signal. Roughly speaking, by distinguishing the characteristics of the exogenous disturbance, existing contributions can be categorized into two types: that is, - and -based results. Compared to the -based results, the -based works do not require any prior knowledge on disturbance, which are more applicable when the unknown inputs are described as bounded signals rather than white noise sequences.2,4
Until now, by using the optimization approaches, much efforts have been paid on fault diagnosis for linear systems with constant coefficient parameter matrices, namely, linear time-invariant (LTI) systems or different kinds of linear parameter-varying systems (which include switched systems and Markovian jump system), where for each mode, the dynamic model reduces to LTI system.7–9 In recent years, in contrast with the progress of the aforementioned systems, some works on linear time-variant (LTV) systems appear, especially for linear discrete time-variant (LDTV) systems, which result from the fact that most of the real-world applications or industrial processes are intrinsically time-variant. Moreover, special efforts are required for time-variant systems since majorities of the existing results for systems with constant coefficient parameter matrices cannot be directly extended to time-variant cases, where the related performance indices, the optimization techniques, and online available algorithms are supposed to be newly proposed. We refer to previous works4–6,10,11 for some representative results on this area.
Nonlinearity is also one of the inherent characteristics for practical systems, and therefore, researchers have devoted much to fault diagnosis for nonlinear systems with bounded inputs. In this literature, with the aid of mature results on fault diagnosis for LTI systems, there are lots of results on systems with nonlinear perturbations, where these systems can be viewed as special LTI systems with nonlinear disturbances.4,12–14 In this manner, designer can extend results for LTI systems to those systems using offline optimization methods. Other results can be found in previous works15–17 for different kinds of nonlinear systems, but one cannot find a unified approach for nonlinear systems. Apart from the existing results, fault diagnosis on nonlinear systems with time-variant coefficient matrices gradually gained attention.18–24 The main obstacle for achieving successful fault diagnosis for this kind of systems lies in that, how to find a feasible way such that not only the nonlinearity can be reasonably tackled but also provide a cost-efficient algorithm for online implementation subject to time-varying coefficients.
In this study, we aim to propose a novel fault estimation method for a class of nonlinear time-variant systems, where the shape and amplitude of the fault are provided (compared to the results on fault detection that only deliver an alarm when the malfunction occurs). The nonlinearity is assumed to be continuously differentiable rather than in the form of state-dependent perturbations,18–20,22,23 and a dynamic filter acting as the fault estimator is designed through linear estimation methodology in Krein space. The contributions of the current study are three-folds:
A non-conservatism framework for estimating the fault is addressed after linearizing the nonlinear system.
A sufficient and necessary condition for the existence of the fault estimator is established.
A recursive algorithm for calculating the gain matrix of the estimator is given.
Notations
Throughout this study, describes the n-dimensional vector space. and , respectively, represent zero and identity matrix with appropriate dimensions. For a positive integer , means the norm of . The linear space spanned by over a given horizon is denoted by . Vectors in Krein space are written by boldface letters, while vectors in Hilbert space are written by normal letters. For a matrix , stands for the positive (negative) definiteness of . and represent the inverse and transpose of , respectively. means the Grammian of Krein space variables a and b. denotes the direct sum of any pair of matrices of size m×n and of size p×q, which is a matrix of size (m + p) × (n + q) defined as .
Problem formulation
Consider the following time-variant nonlinear systems
where , , , , , and denote the state, measurement, controlled input, process disturbance, measurement noise, and the fault signal to be reconstructed, respectively. Here, the signals , , and are assumed to be with bounded norms. , , , , and are known time-varying matrices with appropriate dimensions. The initial state is assumed to be . The nonlinear function is assumed to be continuously differentiable (with standard regularity).25,26
For system (1), our main objective of this study is to find serving as an estimation of the fault using the measurement set so as to fulfill the following index
where
here, represents a given disturbance attenuation ratio and a weighting positive matrix.
To achieve our goal, a dynamic filter which plays the role of the estimator is needed. To proceed, we first expand in Taylor series about in the following way
where and is the state variable of the filter (estimator). is a problem-dependent scaling matrix and is an unknown time-varying parameter matrix used to consider the linearization errors of the dynamic model. is assumed to be bounded as follows
The matrix is given to provide an extra degree of freedom in purpose of tuning the estimator.26
Thus, the original time-variant nonlinear system (1) is transformed into a linear form by taking the linearization error into account, where this error refers to the high-order terms of the Taylor series expansion and is modeled by norm-bounded uncertain matrix.
Traditionally speaking, for the purpose of designing an appropriate to satisfy the index (2), a direct way is to solve a quadratic optimization problem in the following two steps:27–29
Step 1: To guarantee the following transferred performance index that corresponds to index (2) has a minimum over
Step 2: Choose such that the value of in system (7) at its minimum is positive, that is
Observing the fact that the converted system includes uncertain matrices and in equation (6), to find a suitable that satisfies equation (8) or the original performance index (2), we construct an equivalent form of equation (5) as follows
with
For system (9), let
and define the following alternative performance function
Denote as the minimum of . Based on Lemma 1, a corollary can be addressed as follows.
Corollary 1
Given any , for systems (5) and (9), we get
From Lemma 1 and Corollary 1, we know that is a lower bound of , and has the same minimum with when (only for ). Note that the uncertainty in system (5) is rearranged with respect to the alternative system (9) with . Therefore, due to Lemma 1 and Corollary 1, the key to construct is to search in order that . As a result, the fault estimation issue is formulated as Problem 1 in two stages.
Problem 1
To ensure has a minimum over with ;
To choose a suitable such that .
In virtue of Hassibi et al.27 and Zhao et al.,29 Problem 1 can be transformed into a linear estimation problem in indefinite inner product space, namely, Krein space. In other words, we need to build a model in this space with regard to system (9); find the minimum of through linear estimation technique; and then select a suitable such that .
Main results
To continue, we preliminarily introduce the following model through defining a fictitious output
where
Remember that
where
Thus, by using the following notations
can be re-expressed as
where , with .
Let
and denote as the transition matrix of system (12) from time instant to ; then, we have
here, is the operator mapping to with
Let
Since is invertible, we know that
In terms of systems (12)–(18) and according to Hassibi et al.27 and Zhao et al.,29 we can introduce the following Krein space stochastic system to settle Problem 1
where
with , , and , which are identical to the related matrix quantities given in system (12). Here, as well as the initial state are all random variables with zero means, and their covariances are shown below
Based on systems (19) and (20), we can define some related variables below
with
and
where denotes the projection of onto .
Let
and define . In terms of systems (19)–(22), we have
From the analysis above and according to Hassibi et al.,27 we can draw the following result, which is summarized as Corollary 2.
Corollary 2
For system (9) and a given perturbation attenuation ratio , has the minimum over the set , if and only if (iff) and have the same inertia. In such a case, the minimum of , namely , is calculated by
where
here, is computed by the projections of on in Krein space.
Based on Corollary 2, we are ready to choose an appropriate function of the measurement set as to guarantee . Theorem 1 provides one choice of to achieve our goal.
Theorem 1
For system (9) and a given perturbation attenuation ratio , the fault estimator that fulfills the performance index (2) exists, iff
In such a case, one choice of is given as
where is computed by the projections of on in Krein space.
Proof
Let
Thus, in system (24) can be rewritten as
where . Hence, by using Corollary 2, we know that has the minimum over the set , iff and have the same inertia. Due to system (27) and the structure of in system (23), we know that the fault estimator that fulfills the performance index (2) exists iff and .
Partition the measurement variable in system (20) as follows
where , and denote as the projection of onto , then we can easily find that .
Note that
and let be the projection of onto , then we know that
Denote and let be the mirror variable of in Krein space. By defining as the projection of onto , we immediately have
Thus, by applying the Schur factorization in systems (25)–(27), and observing the fact that
we then have the following relationship from systems (28)–(30)
where and .
Recalling the necessary and sufficient condition that ensures the existence of the fault estimator, that is
and applying Corollary 2, a natural choice that guarantees through system (31) is
which is system (26). This completes the proof. □
After choosing a suitable , the final task is to find an algorithm that computes the key intermediate variable . From Hassibi et al.,27 Corollary 2, and Theorem 1, we know that can be computed by the projection of on in Krein space. Corollary 3 states the evolution of .
Corollary 3
The state variable of the estimator can be computed in the following way
where
with and
Proof
Since can be computed by the projections of on in Krein space, we immediately have
where
Thus, systems (35) and (36) lead to the form of the filter in system (32) with its gain matrix in system (33).
Note that the variables and can be directly computed based on the Krein space model (19) using the inner product as follows, respectively
and
Hence, by using the orthogonal property between and , we have , which is system (34). This completes the proof. □
Remarks
Before ending the main body of this study, we would like to give some remarks:
In view of Theorem 1 and Corollary 3, our proposed algorithm provides a generalized form on some kinds of discrete time-variant systems, such as nonlinear system with differentiable condition, linear nominal systems, and uncertain linear system. It should be pointed out that, although one can neglect the linearization errors when using Taylor series expansions for the considered nonlinear system, or directly augment these errors into unknown input, some design conservatism may be introduced by artificially ignoring some prior information on the system. In contrast, our algorithm does not produce the conservatism by taking these errors in the design procedure.30
In this study, the considered nonlinearity only appears in the state equation (1). We would like to mention that, our result can also be extended to the cases when the same category of the nonlinearity occurs in the measurement equation by choosing appropriate auxiliary variables and the corresponding dynamic model in Krein space.
Due to the recursive property of the proposed algorithm, the fault signal can be estimated in real time. For nonlinear systems subject to stochastic modeling uncertainties, unreliable communication links, or with other kinds of random properties, much effort should be paid on online fault detection, fault estimation, and fault isolation, which leads to our future work.
An illustrative example
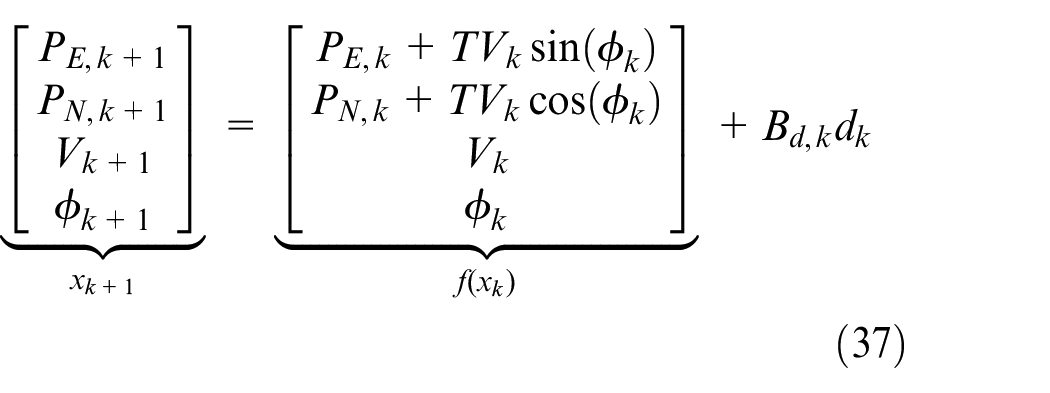
In recent years, indoor robot localization has attracted wide attention. In order to acquire the accurate position information, some state estimators such as Kalman filter and finite impulse response filter are used as the data fusion filter to improve the accuracy.31 The state equation used by these filters at time index can be described as follows
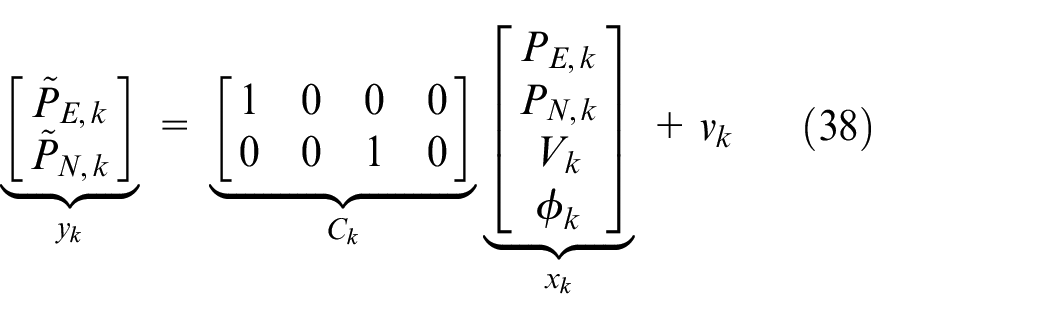
here, is the sampling interval, and the state variables can be represented using a vector as , where and , respectively, denote the robot position in the east and north directions. denotes the robot velocity, and is the yaw angle of robot. means the process disturbance with coefficient matrix . The observation output equation at time index can be described as follows
where is the measurement vector and is the measurement noise. and are the ultra wideband (UWB)-derived positions in the east and north directions, respectively. represents the measurement noise.
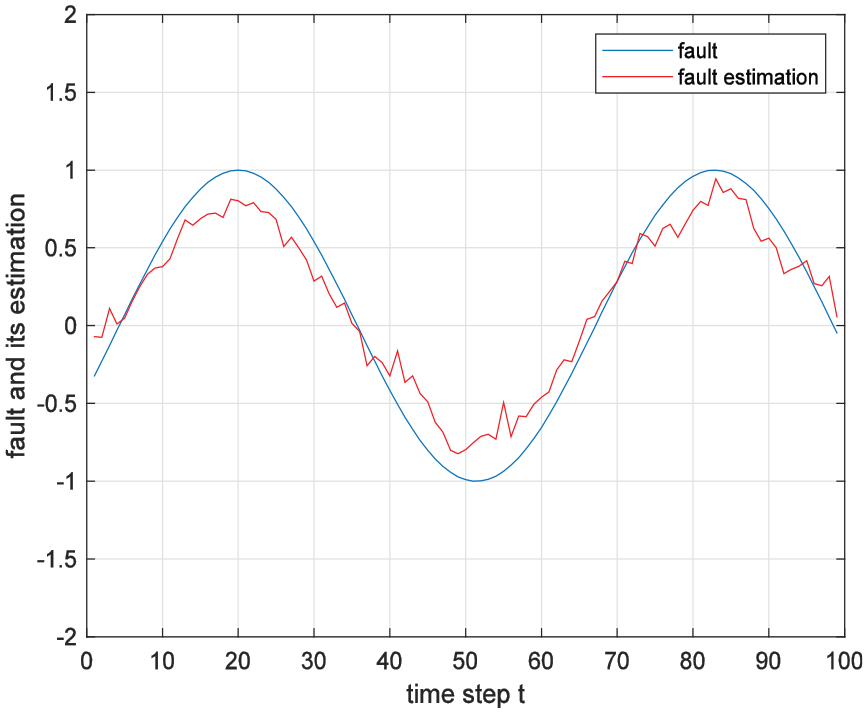
Based on the above state-space models, that is, systems (37) and (38), consider the circumstance that when process fault and/or sensor fault occurs, the simulation of fault estimation for indoor robot localization systems is performed. During the simulation, the sampling time is set to 0.01 s. The process disturbance and measurement noise are assumed to be zero-mean white noise sequences with covariance matrices and , respectively. The fault signal is simulated as
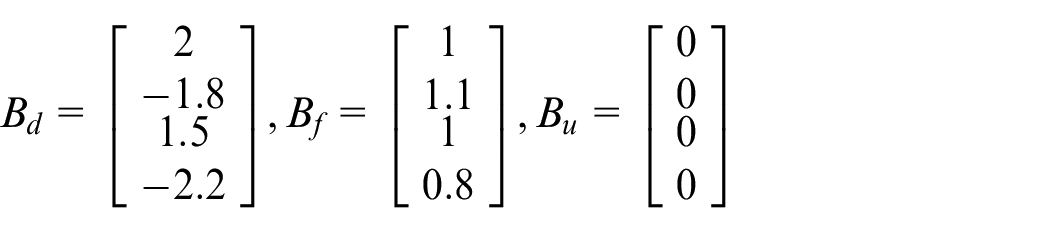
and the related matrices in system (1) are assumed to be as follows
Let , , , and , by using Theorem 1 and Corollary 3, the estimated signal can be generated. Figure 1 shows along with . Based on the simulation results, we know that the proposed algorithm can track the fault well for the concerned nonlinear time-variant systems.
Fault signal and its estimation.
Conclusion
In this paper, the fault estimation problem for a class of time-variant nonlinear systems has been studied in the setting, where the concerned nonlinearity is assumed to be continuously differentiable. By employing the Taylor series expansions, the original nonlinear system has been rewritten as a LTV system with modeling errors. An alternative system and its corresponding indefinite quadratic performance function have been addressed in lieu of the uncertain dynamics and the traditional performance index, respectively. After formulating the estimation issue as a two-stage optimization problem, an auxiliary model in Krein space has been introduced. The well-known orthogonal projection technique has been applied to solve this optimization problem, and a necessary and sufficient condition on the existence of the fault estimator has been obtained. To achieve real-time fault estimation, a recursive algorithm for calculating the gain matrix of the estimator has been provided, where its effectiveness has been verified by applying the proposed method to a faulty indoor robot localization system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grant numbers 61973135, 91948201, 61773242, and 61673245; the Shandong Provincial Key R&D Program, China, under grant no. 2018GGX104025; and the project ZR2017QF007 supported by Shandong Provincial Natural Science Foundation.
ORCID iD
Yueyang Li
References
1.
BlankeMKinnaertMLunzeJ, et al. Diagnosis and fault-tolerant control, vol. 2. Berlin: Springer, 2006.
ZaytoonJLafortuneS.Overview of fault diagnosis methods for discrete event systems. Ann Rev Contr2013; 37(2): 308–320.
4.
ZhongMYXueTDingSX.A survey on model-based fault diagnosis for linear discrete time-varying systems. Neurocomputing2018; 306: 51–60.
5.
LiYKarimiHRZhongM, et al. Fault detection for linear discrete time-varying systems with multiplicative noise: the finite-horizon case. IEEE Trans Cir Syst I Reg2018; 65(10): 3492–3505.
6.
LiYYKarimiHRAhnCK, et al. Optimal residual generation for fault detection in linear discrete time-varying systems with uncertain observations. J Franklin Inst2018; 355(7): 3330–3353.
7.
LiTGuoL.Optimal fault-detection filtering for non-Gaussian systems via output PDFs. IEEE Trans Syst Man Cybernet A Syst Human2009; 39(2): 476–481.
8.
WangZShiPLimCC.H–/H∞ fault detection observer in finite frequency domain for linear parameter varying descriptor systems. Automatica2017; 86: 38–45.
9.
LongYParkJHYeD.Transmission-dependent fault detection and isolation strategy for networked systems under finite capacity channels. IEEE Trans Cybernet2017; 47(8): 2266–2278.
10.
LiXBZhouKM.A time domain approach to robust fault detection of linear time-varying systems. Automatica2009; 45(1): 94–102.
11.
ZhongMYDingSXZhouDH.A new scheme of fault detection for linear discrete time-varying systems. IEEE Trans Automat Contr2016; 61(9): 2597–2602.
ZhangXPolycarpouMMParisiniT.Fault diagnosis of a class of nonlinear uncertain systems with Lipschitz nonlinearities using adaptive estimation. Automatica2010; 46(2): 290–299.
14.
PolycarpouMMTrunovAB.Learning approach to nonlinear fault diagnosis: detectability analysis. IEEE Trans Automat Contr2000; 45(4): 806–812.
15.
LiHChenZWuL, et al. Event triggered fault detection of nonlinear networked systems. IEEE Trans Cybernet2017; 47(4): 1041–1052.
16.
LiuXSuXShiP, et al. Fault detection filtering for nonlinear switched systems via event-triggered communication approach. Automatica2019; 101: 365–376.
17.
PersisCDIsidoriA.A geometric approach to nonlinear fault detection and isolation. IEEE Trans Automat Contr2002; 46(6): 853–865.
18.
LiZWangZShuH, et al. H∞ fault estimation with randomly occurring uncertainties, quantization effects and successive packet dropouts: the finite-horizon case. Int J Robust Nonlin Contr2015; 25(15): 2671–2686.
19.
DongHWangZDingS, et al. On H∞ estimation of randomly occurring faults for a class of nonlinear time-varying systems with fading channels. IEEE Trans Automat Contr2016; 61(2): 479–484.
20.
RenWWangCYangL.Fault estimation for time-varying Markovian jump systems with randomly occurring nonlinearities and time delays. J Franklin Inst2016; 354(3): 1388–1402.
21.
ChaoDShengLLiuY, et al. Event-based H∞ fault estimation for networked time-varying systems with randomly occurring nonlinearities and (x, v)-dependent noises. Neurocomputing2018; 285: 220–229.
22.
BuXDongHWangZ, et al. Non-fragile distributed fault estimation for a class of nonlinear time-varying systems over sensor networks: the finite-horizon case. IEEE Trans Sig Inform Process Netw2019; 5(1): 61–69.
23.
DongHHouNWangZ, et al. Finite-horizon fault estimation under imperfect measurements and stochastic communication protocol: dealing with finite-time boundedness. Int J Robust Nonlin Contr2019; 29: 117–134.
24.
LiuHZhongMLiuY.A new residual evaluation function based fault diagnosis for a kind of nonlinear systems. Asian J Contr2019; 21(4): 1–13.
25.
CalafioreG.Reliable localization using set-valued nonlinear filters. IEEE Trans Syst Man Cybernet A Syst Human2005; 35(2): 189–197.
26.
HuJWangZGaoH, et al. Extended Kalman filtering with stochastic nonlinearities and multiple missing measurements. Automatica2012; 48(9): 2007–2015.
27.
HassibiBSayedAHKailathT.Indefinite-quadratic estimation and control: a unified approach to H2 and H∞ theories, vol. 16. Philadelphia, PA: SIAM, 1999.
28.
ZhaoDDingSXWangYQ, et al. Krein-space based robust H∞ fault estimation for two-dimensional uncertain linear discrete time-varying systems. Syst Contr Lett2018; 115: 41–47.
29.
ZhaoDDingSXKarimiH, et al. Robust H-infinity filtering for two-dimensional uncertain linear discrete time-varying systems: a Krein space-based method. IEEE Trans Automat Contr. Epub ahead of print 2April2019. DOI: 10.1109/TAC.2019.2908699.
XuYKarimiHRLiY, et al. Real-time accurate pedestrian tracking using extended finite impulse response filter bank for tightly coupling recent inertial navigation system and ultra-wideband measurements. Proc IMechE, Part I: J Systems and Control Engineering2018; 232(4): 464–472.