
Abstract
Although choice of task has been effective in reducing noncompliance, it may provide an opportunity to escape from less-preferred tasks. We used a reversal design to evaluate the effects of choice of a low-preference task sequence on noncompliance, task engagement, and duration to complete activities across two individuals with autism spectrum disorder and one participant with a speech and language impairment. Choice of task sequence effectively reduced noncompliance across two participants. For the third participant, choice was initially effective although treatment effects failed to replicate. Task engagement was greater during choice than the no-choice condition for one participant, while there were no meaningful differences for the remaining two participants. Duration to complete tasks was similar across conditions across participants. During choice, noncompliance generalized to a novel teacher and the effects maintained across two participants. Social validity of the procedures and outcomes were assessed and found to be favorable.
Children with autism spectrum disorder (ASD) often engage in noncompliant behavior which can include not following instructions, off-task behavior, and engaging in other problem behavior (e.g., aggression, disruption; Luiselli, 2008). Noncompliance can affect academic, prevocational, and self-help skills (Bouxsein, Roane, & Harper, 2011; Carr & Carlson, 1993; Dunlap et al., 1994; Heuete, Schmidt, Lopez-Arvizu, 2014) and can often lead to aggression when individuals are required to complete nonpreferred instructions (Luiselli, 2008). Children who engage in noncompliance are often placed in more restrictive environments and have fewer opportunities to socialize with peers, be involved in community-based activities, and are more likely to be subjected to consequence-based interventions (e.g., punishment; Carr & Carlson, 1993; Lerman & Vorndran, 2002).
Antecedent-based interventions alter environmental factors to prevent noncompliant behavior before it occurs rather than consequating it (Kern & Clemens, 2007; Luiselli, 2008). Choice, an antecedent intervention, may offer advantages over consequence-based interventions. Antecedent-based interventions may be less likely to provide escape from tasks (Kern & Clemens, 2007; Magee & Ellis, 2001), may also be less likely to evoke interfering behaviors, and may more likely promote an environment conducive for learning (Luiselli, 2008; Morrison, Roscoe, & Atwell, 2011).
In one of the first evaluations of choice with individuals with developmental and intellectual disabilities, Dyer, Dunlap, and Winterling (1990) investigated the effects of choice of tasks and reinforcers across three participants diagnosed with ASD and pervasive development disorder who engaged in disruptive behavior. Using a reversal design, choice and no-choice conditions were compared. It was found that the percentage of disruptive behavior decreased during choice conditions as compared with no-choice even when the teacher delivered access to the same tasks and reinforcers. Other studies that have evaluated the effects of choice of task on responding found analogous results (e.g., Dunlap et al., 1994; Powell & Nelson, 1997; Romaniuk et al., 2002) demonstrating that there may be reinforcing properties of choice that extend beyond access to preferred stimuli.
There are several limitations of previous research of choice. Most notably, choice of task may permit individuals to avoid or escape less-preferred tasks (e.g., Dunlap et al., 1994; Dyer et al., 1990; Powell & Nelson, 1997; Romaniuk et al., 2002); therefore, choice of task may have limited utility in less restrictive settings (e.g., reduced teacher ratio classrooms, community-based instruction, and prevocational training; Kern, Mantegna, Vorndran, Bailin, & Hilt, 2001). It is important to further investigate whether choice making can have reinforcing qualities without sacrificing completion of tasks.
In the first study to assess the effects of choice of task sequence, Kern et al. (2001) evaluated problem behavior across choice of task sequence across three tasks as compared with no-choice of task sequence with participants with multiple disabilities. Results demonstrated that choice reduced problem behavior and increased task engagement across participants. For one participant, who chose the same sequence of tasks across all choice sessions, a yoking procedure was implemented to assess whether the participant preferred a specific order of tasks or preferred choosing the order of tasks. Overall, findings suggest that choice making has a reinforcing value that extends beyond access to preferred tasks.
Smeltzer, Graff, Ahearn, and Libby (2009) replicated and extended Kern et al.’s (2001) study by evaluating choice of a low-preference (low-p) task sequence compared with no-choice of a low-p task sequence on rates of noncompliance, percentage of task engagement, and duration of task completion across two participants diagnosed with autism and one diagnosed with Fragile X syndrome. An alternating treatments design was used to compare three conditions: student selection of task sequence, experimenter selection of task sequence, and a yoked condition during which the experimenter selected the same task as previously selected in the student choice condition. Across participants, student choice of task sequence reduced rates of noncompliance, increased on-task behavior, and decreased duration to complete tasks. With two of the participants, frequency of problem behavior decreased to zero during the choice of task sequence condition.
Given the dearth of research evaluating the effects of choice of task sequence, additional research is warranted. Most notably, past research omitted assessment of generalization of behavior across settings and teachers and behavior over time (e.g., Kern et al., 2001; Smeltzer et al., 2009). Furthermore, a limited number of studies assessed social validity to ensure the social significance of procedures (i.e., Dunlap et al., 1994) and outcomes. It is important to assess social validity to evaluate how meaningful choice of task order is to stakeholders. Finally, only a limited number of studies assessed reliability of procedures (i.e., Dyer et al., 1990). It is important to include measures of reliability to ensure procedures are implemented as described.
The purpose of the current study was to extend limited research on choice of task order by evaluating the effects of choice of a low-p task sequence on noncompliance, task engagement, and the duration of task completion. The current study extended prior research by assessing preference for choice using a progressive ratio schedule. The specific research questions were as follows: (a) What are the effects of providing choice of low-p tasks on noncompliant behavior, task engagement, and duration to complete tasks? (b) Does the opportunity for participants to select the sequence of low-p tasks generalize to different settings and with different teachers? (c) If successful, will the effects of choice of low-p task sequence be maintained over 3 and 4 weeks? (d) Are the procedures and outcomes of choice of task sequence socially valid? (e) What is the sensitivity of choice using a progressive ratio schedule relative to no-choice? (f) Will stakeholders rate the procedures and outcomes as socially valid?
Method
Participants
Three male participants, between 5 and 13 years old, were recruited based upon teacher reports of interfering levels of noncompliant behavior. Criteria for inclusion were (a) independent choice making, (b) label and complete at least seven classroom activities with at least 80% accuracy over two consecutive presentations, (d) engagement in noncompliant behavior, (e) and match text or picture to sample materials and sample materials to text or picture at 100% accuracy for two consecutive sessions. Approval from both the Department of Education and the University Institutional Review Board was obtained and informed consent was provided by parents or guardians across participants.
Matthew was a 12-year-old boy who was diagnosed with a speech and language impairment by an outside agency. Matthew was reading on a third-grade curriculum level at the beginning of the study. Derek was a 13-year-old young man who was diagnosed with ASD by an outside agency at 3 years of age. Derek was also reading on a third-grade curriculum level at the start of the study. Ethan was a 5-year old boy who had been diagnosed with ASD by an outside agency at the age of 2 years. Ethan could not read or reliably identify sight words. Because of Matthew and Derek’s reading skills, a written schedule was used for them during the experiment, whereas a picture schedule was used with Ethan. All participants had a previous history of using a vertical schedule and choice making of reinforcers. No participants had a history of choosing task order.
Levels of noncompliance of participants were assessed via classroom observation by the experimenter. Data on noncompliance were collected using 30-s partial interval recording (PIR) during three 10-min sessions during academic and prevocational tasks. Mean noncompliance equaled 34%, 65%, and 25% for Matthew, Derek, and Ethan, respectively.
Setting, Sessions, and Materials
The study occurred in public charter school. All sessions were conducted in each of the participants’ classrooms or in other areas of the school (i.e., school kitchen, life skills room).
Sessions were conducted one to three times per day for 3 to 5 days per week. Sessions were separated by a minimum duration of 30 min to minimize carryover effects and exposure to tasks. Sessions duration was between 5 to 20 min.
Materials included (a) six colored cards (7.6 cm by 5.1 cm); (b) two vertical schedules (choice and no-choice), laminated on approximately 21.6 cm by 28 cm of colored construction paper; (c) black 20 pt. Times New Roman written labels (7.6 cm by 2.5 cm) or pictures (12.7 cm by 7.6 cm) of designated tasks (e.g., fold laundry, puzzle); (d) a digital countdown timer used for data collection; (e) condition-specific data sheets used to collect data with a pen or pencil; and (f) a handheld video camera and laptop computer used to record sessions.
Materials for low-p tasks varied per participant based on results from a brief multiple stimulus without replacement (MSWO; Carr, Nicolson, & Higbee, 2000) preference assessment (e.g., beads and string, puzzle pieces, soap, a sponge and dishes, etc.). A complete list of materials for low-p tasks can be found in Table 1. Previously mastered leisure and tasks related to independent play that evoked noncompliant behavior were assessed.
Materials Used for Low-p Each Task.
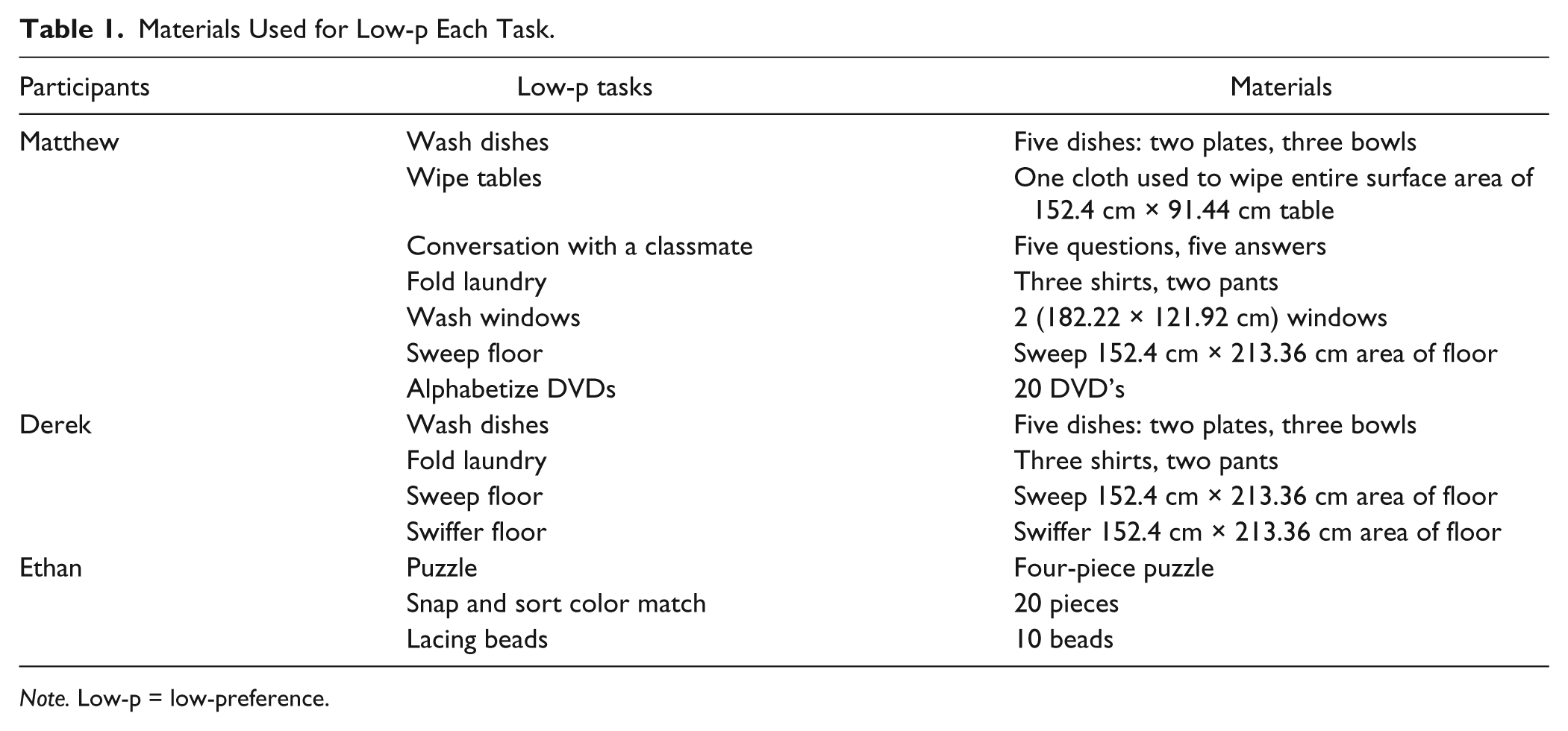
Note. Low-p = low-preference.
Dependent Variables and Data Collection
Four dependent variables were assessed in this study and were the percentage of intervals of noncompliance, the percentage of intervals of task engagement, duration of task completion, and the cumulative number of initial selections.
Definitions of noncompliance were individualized across participants and generally consisted of not responding to an instruction within 3 to 5 s or engaging in an interfering behavior when presented with an instruction. Data on noncompliance were collected using 30-s PIR. Noncompliance was calculated by dividing the number of intervals with noncompliance by the total number of intervals in the session and was summarized as the percentage of intervals with noncompliance.
Task engagement was defined as appropriately manipulating for at least 2 s without ceasing for more than 2 s (Smeltzer et al., 2009). Data were collected using 30-s momentary-time sampling (MTS) with an observation and data collection window of 2 s and were calculated by dividing the number of intervals scored engaged by the total number of intervals. Data were summarized as the percentage of intervals of task engagement during low-p tasks.
Duration of task completion was recorded when the instructions were presented and ended when the last task was finished (Smeltzer et al., 2009). Data were summarized as the total duration to complete tasks rounded to the nearest whole second.
During the assessment evaluating preference of choice, the cumulative number of initial selections was recorded. A selection was scored when the participant pointed to, gestured to, or vocalized a request for either the choice or no-choice schedule within 5 s of the schedule’s presentation. The total number of tasks completed with each selection was also recorded.
Experimental Design
An A-B-A-B reversal design was used to compare the percentage of noncompliance, task engagement, and duration during the choice of task sequence condition to the no-choice of task sequence condition. Condition A referred to the no-choice condition and Condition B referred to the choice condition.
Pre-experimental Assessments
Task and color preference assessments
To identify at least seven low-p tasks per participant, participant’s teachers were presented with an eight-item open-ended questionnaire (available upon request). A brief MSWO preference assessment (Carr et al., 2000) was conducted across participants to identify three low-p tasks.
Results of the brief MSWO assessments are shown in Figure 1. Three tasks selected less than 30% of opportunities were considered least preferred and were evaluated across choice and no-choice conditions. A complete list of materials associated with each task can be found in Table 1.
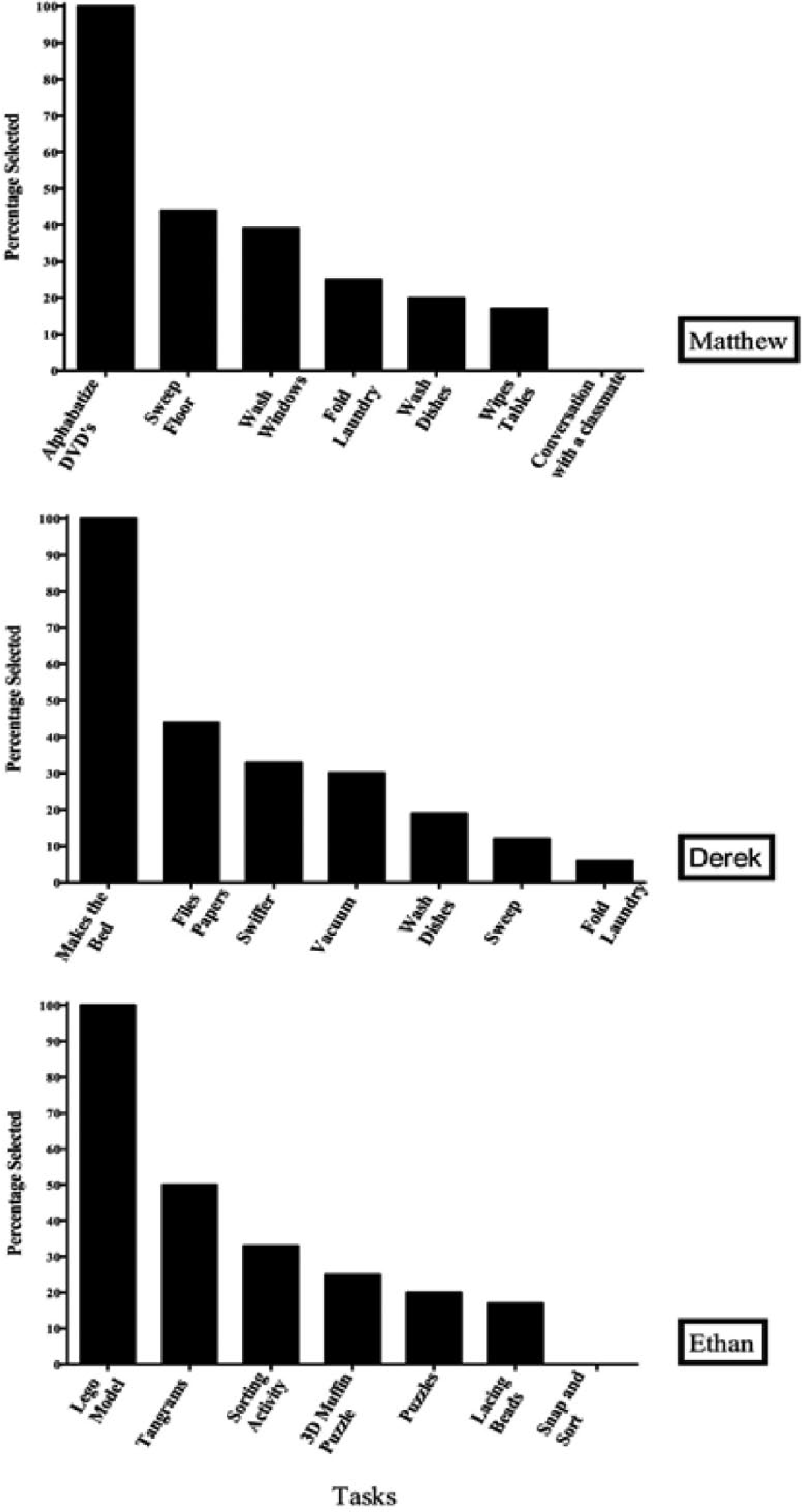
Results of Matthew, Derek, and Ethan’s MSWO preference assessment of low-p tasks.
A paired stimulus preference assessment (Fisher et al., 1992) was used to identify participants’ moderately preferred colors (i.e., chosen approximately 50%–70% of opportunities) across six different colors (e.g., red, green, yellow, blue, purple, orange). Two colors moderately selected were used as the background of choice and no-choice schedules. Colors selected were green and red, blue and green, and orange and blue for Matthew, Derek, and Ethan, respectively (data available via corresponding author).
Procedure
No-choice of task
During the no-choice of task condition, participants were presented with three written labels or pictures of low-p tasks and a schedule. A session began with the experimenter stating, “I am going to choose the order of your schedule.” Afterward, the experimenter attached the written labels or pictures onto the left-hand side of the schedule. Task sequence was counterbalanced so that every possible order of tasks was exhausted before using the same order. Across all sessions, a least-to-most prompting hierarchy was used for participants. When participants were not engaged with a task for more than 5 s, the experimenter provided a vocal prompt paired with a gestural prompt (i.e., pointed to the schedule and stated, “do your work”). If participants did not engage in the task after vocal and gestural prompts were delivered, manual guidance was provided. Manual guidance was faded as soon as the participant began to engage in the task independently. If the participant did not engage in the task for 2 min after vocal, gestural, and manual prompts were delivered, the session was terminated. The schedule was considered complete when the participant finished the third task and returned materials related to the task. Vocal praise was provided once participants completed all three tasks.
Choice of task condition
During the choice of task condition, participants were presented with written labels or pictures of three low-p tasks and the schedule. Written labels or pictures of the tasks were placed next to the schedule in a messy array. The session began with the experimenter stating, “Now it’s your turn to choose the order of your schedule, put the tasks in the order that you want!” Participants were provided the opportunity to Velcro pictures or written labels to the schedule in any order. If participants did not initiate ordering their schedule within 5 s, the experimenter provided a gestural prompt paired with a vocal prompt and stated, “Pick the order of your schedule.” Once the participant selected the sequence of his schedule, procedures used in the choice condition were identical to those used in the no-choice condition.
No-choice yoked condition
For Matthew, who chose the same order of tasks during choice sessions, a no-choice yoked condition was implemented to replicate the order of his preferred sequence. The no-choice yoked condition used procedures identical to the no-choice condition except that the experimenter selected Matthew’s preferred sequence of tasks across sessions.
Generalization
Generalization across novel instructors (i.e., a teacher who had no history working with the student) was assessed for Matthew across both choice and no-choice conditions because he had a previous history of completing tasks in other areas of the school. Generalization probes were conducted for Derek and Ethan across novel settings during the choice and no-choice conditions because they had no prior history completing tasks in other areas of the school. Generalization probes were conducted using the same procedures used in the choice and no-choice conditions. No additional prompts or reinforcement was provided during generalization probes. Generalization data were only collected across no-choice and choice on the percentage of intervals with noncompliance.
Maintenance
For the two participants, who responded positively to choice, maintenance data were collected on percentage of noncompliance, 3 and 4 weeks after the completion of the choice schedule. Procedures during maintenance probes were identical to those used in choice of task sequence condition. The experimenter presented the choice of task sequence schedule and allowed participants to select the sequence of their tasks. No additional prompts or reinforcement was provided during maintenance sessions.
Concurrent Operant Assessment
For Matthew and Derek, who responded positively during the choice of task sequence condition (i.e., percentage of intervals with noncompliance decreased during choice sessions), sensitivity to the relative value of choice was assessed using a concurrent operant arrangement. During this assessment, participants were given the option of selecting choice or the no-choice task schedule. Using a progressive ratio schedule, tasks were systematically increased by one task per selection of choice of task sequence condition. The no-choice of task sequence condition remained fixed with three tasks (Tiger, Hanley, & Hernandez, 2006). During the concurrent operant assessment, participants were presented with written labels of low-p tasks placed next to both the choice and no-choice schedule. For Derek, the sequence of tasks was counterbalanced similar to procedures used during previous choice and no-choice conditions. For Matthew, the no-choice schedule was yoked so that when presented, it was fixed with Matthew’s sequence of tasks. Schedules were different colors so that participants could distinguish between the choice and no-choice conditions. The session began as soon as the experimenter said to the participant “Pick which schedule you want to do.” If the participant did not initiate a selection within 30 s, the session was terminated. If the participant selected the choice schedule, the experimenter said, “make your schedule,” and the participant was given the opportunity to Velcro written labels to the schedule. If the participant selected the no-choice schedule, the experimenter placed the written labels on the schedule using a counterbalanced sequence for Derek and the preferred sequence of tasks for Matthew (i.e., wash dishes, wipe tables, have a conversation) and said, “Do your schedule.” While participants completed the schedule, a least-to-most prompt hierarchy was implemented, identical to procedures used during choice and no-choice conditions.
Interobserver Agreement (IOA) and Treatment Integrity
An independent observer collected IOA data across 38%, 40%, and 40% of all experimental sessions for Matthew, Derek, and Ethan, respectively. IOA for noncompliance and task engagement was scored using interval-by-interval IOA, which consisted of dividing the number of intervals with agreement by the total number of intervals. Mean agreement for noncompliance equaled 90% (range = 90%–92%) for Matthew, 90% (range = 90%–94%) for Derek, and 100% for Ethan. Mean agreement for task engagement equaled 97% (range = 95%–100%) for Matthew, 90% (range = 90%–94%) for Derek, and 100% for Ethan. IOA was calculated for duration recording by using total duration IOA by dividing the shorter duration by the longer duration and multiplying by 100%. Mean agreement for duration was 100% for Matthew and Ethan and was 90% (range = 90%–94%) for Derek.
Treatment integrity data were collected across 35% of sessions for Matthew and 40% for Derek and Ethan. Data were calculated by having an independent observer collect data on the fidelity of procedures using a checklist from video-recorded sessions by dividing the number of components correctly completed by the total number of condition-specific components multiplied by 100%. Mean treatment integrity data equaled 98% for Matthew (range = 88%–100%), 99% for Derek (range = 88%–100%), and 96% for Ethan (88%–100%). IOA of treatment integrity was collected across 35% of sessions for Matthew and 40% for Derek and Ethan. Mean IOA of treatment integrity data equaled 97% for Matthew (range = 88%–100%), 94% for Derek (range = 88%–100%), and 98% for Ethan (88%–100%).
Results
Figure 2 shows the effectiveness of choice of task sequence on the percentage of noncompliance across no-choice and choice conditions for Matthew (top panel), Derek (middle panel), and Ethan (lower panel). During the first no-choice condition, Matthew’s percentage of intervals of noncompliance was initially variable but eventually stabilized. The mean percentage of intervals of noncompliance was higher (M = 43%, range = 31%–50%) during the initial no-choice phase than observed during the initial choice phase (M = 17.6%, range = 9%–29%). During the second no-choice phase, Matthew’s percentage of intervals of noncompliance increased higher (M = 54%, range = 27%–72%) than the previous no-choice level. During the second implementation of choice phase, Matthew’s percentage of intervals of noncompliance decreased (M = 23%, range = 12%–35%) to a percentage comparable with the first choice phase. During the yoked no-choice condition, Matthew’s percentage of noncompliance was comparable (M = 25%, range = 13%–35%) with the previous choice phase and decreased slightly (M = 23%, range = 22%–25%) during the last choice phase.
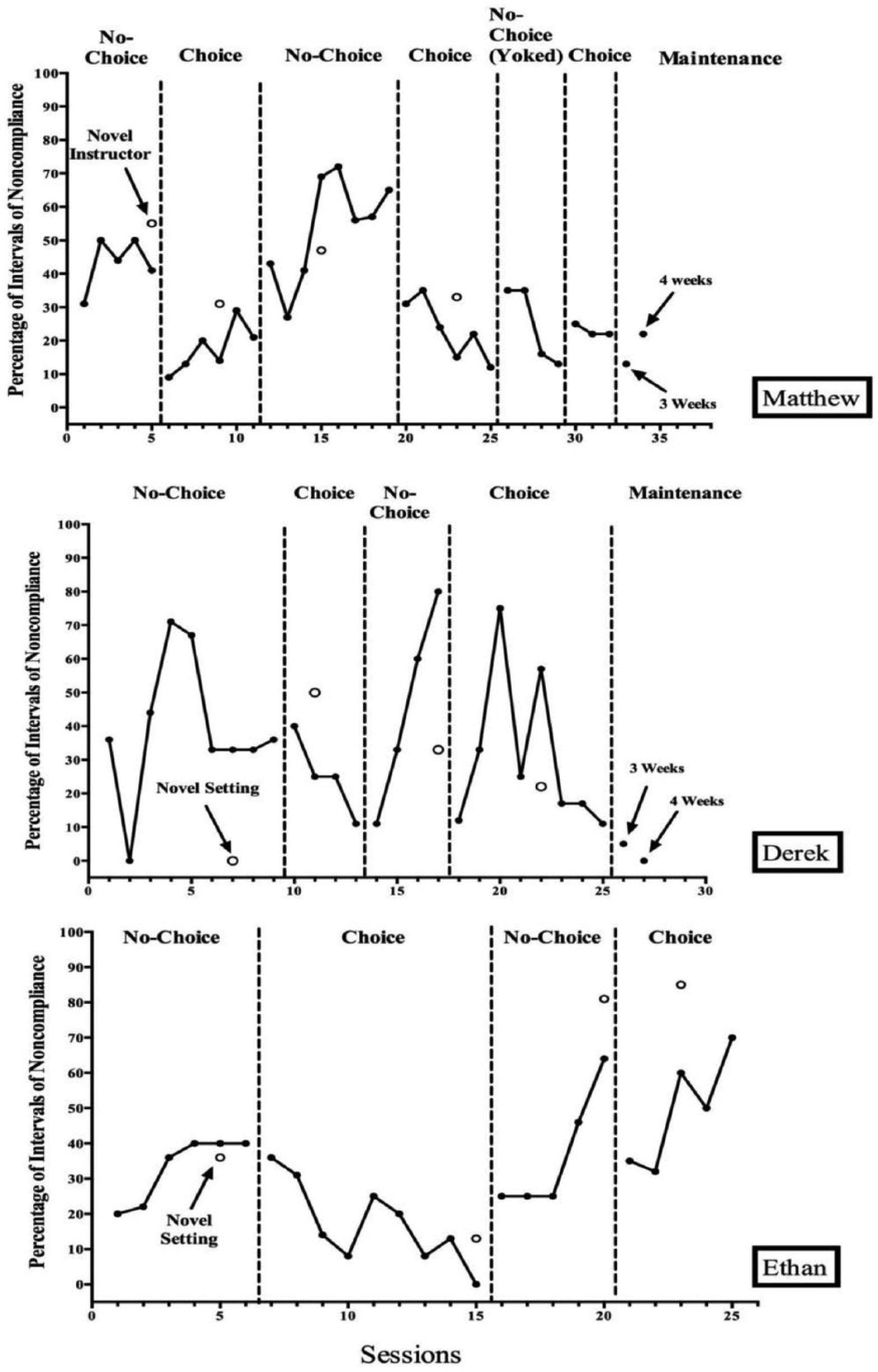
Percentage of intervals of noncompliance for Matthew (top panel), Derek (middle panel), and Ethan (lower panel) during baseline (no-choice), choice of task sequence, generalization (novel setting), and maintenance conditions (Derek and Matthew only).
For Matthew, similar levels of noncompliance in the presence of novel instructors were observed across no-choice phases. During the first and second no-choice phases, the percentage of intervals of noncompliance observed with a novel instructor equaled 55% and 47%, respectively. Generalization of noncompliance using novel instructors during the first and second choice conditions decreased to 31% and 33%, respectively. During maintenance, Matthew’s percentage of intervals of noncompliance remained low 3 and 4 weeks after the completion of treatment (13% and 22%, respectively).
As shown in the middle panel of Figure 2, higher levels of noncompliance were observed for Derek across no-choice conditions, (M = 43%) than choice conditions (M = 28%). Derek’s percentages of noncompliance in a novel setting were variable across no-choice and choice phases. Across generalization probes across conditions, there were no meaningful differences. The percentage of noncompliance behavior observed during maintenance was low and equaled 5% and 0% during probes conducted 3 and 4 weeks after the completion of the study.
As shown in Figure 2 (lower panel), Ethan’s percentage intervals of noncompliance were initially variable during the first no-choice condition but stabilized at moderate levels (M = 33%, range = 20%–40%) compared with the first choice condition which demonstrated lower levels of responding on a decreasing trend (M = 17%, range = 0%–36%). During the second no-choice phase, Ethan’s percentage of noncompliance increased to levels exceeding the first no-choice condition (M = 37%, range = 25%–64%). During the last treatment phase, Ethan’s percentage of noncompliance did not return to levels previously observed in the initial choice phase and similar levels of responding to the no-choice phase was observed (M = 51%, range = 35%–70%). Generalization of noncompliance across novel settings was demonstrated during the first two phases where noncompliance during no-choice (i.e., 36% of intervals) exceeded noncompliance observed during choice (i.e., 13% of intervals.) During the last two phases of no-choice and choice, noncompliance exceeded percentage intervals observed across previous conditions (i.e., 81% and 85% of intervals, respectively). Maintenance data were not collected for Ethan because the choice condition did not reduce noncompliant behavior in the final choice phase.
Figure 3 shows the results of choice of task sequence on the percentage of task engagement across choice and no-choice conditions for Matthew (top panel), Derek (middle panel), and Ethan (lower panel). For Matthew, task engagement was slightly higher during the choice conditions (M = 72%) than the no-choice conditions (M = 59%). However, across the other two participants, no meaningful difference in percentages of task engagement across conditions was observed.
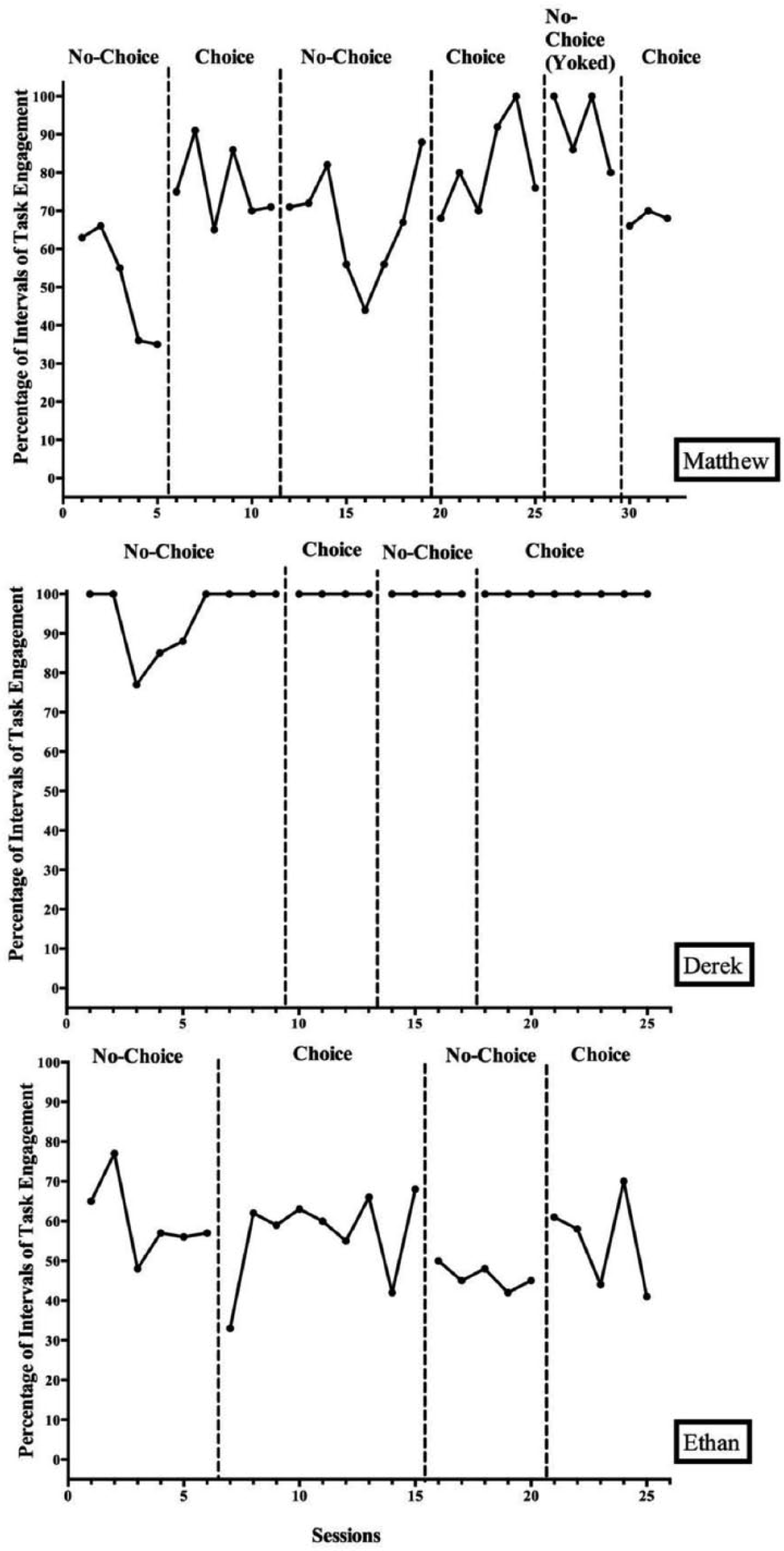
Percentage of intervals of task engagement for Matthew (top panel), Derek (middle panel), and Ethan (lower panel) during baseline (no-choice) and choice of task sequence.
The duration to complete tasks across choice compared with no-choice conditions for Matthew (top panel), Derek (middle panel), and Ethan (lower panel) is shown in Figure 4. Across participants, no meaningful differences of duration across conditions were observed.
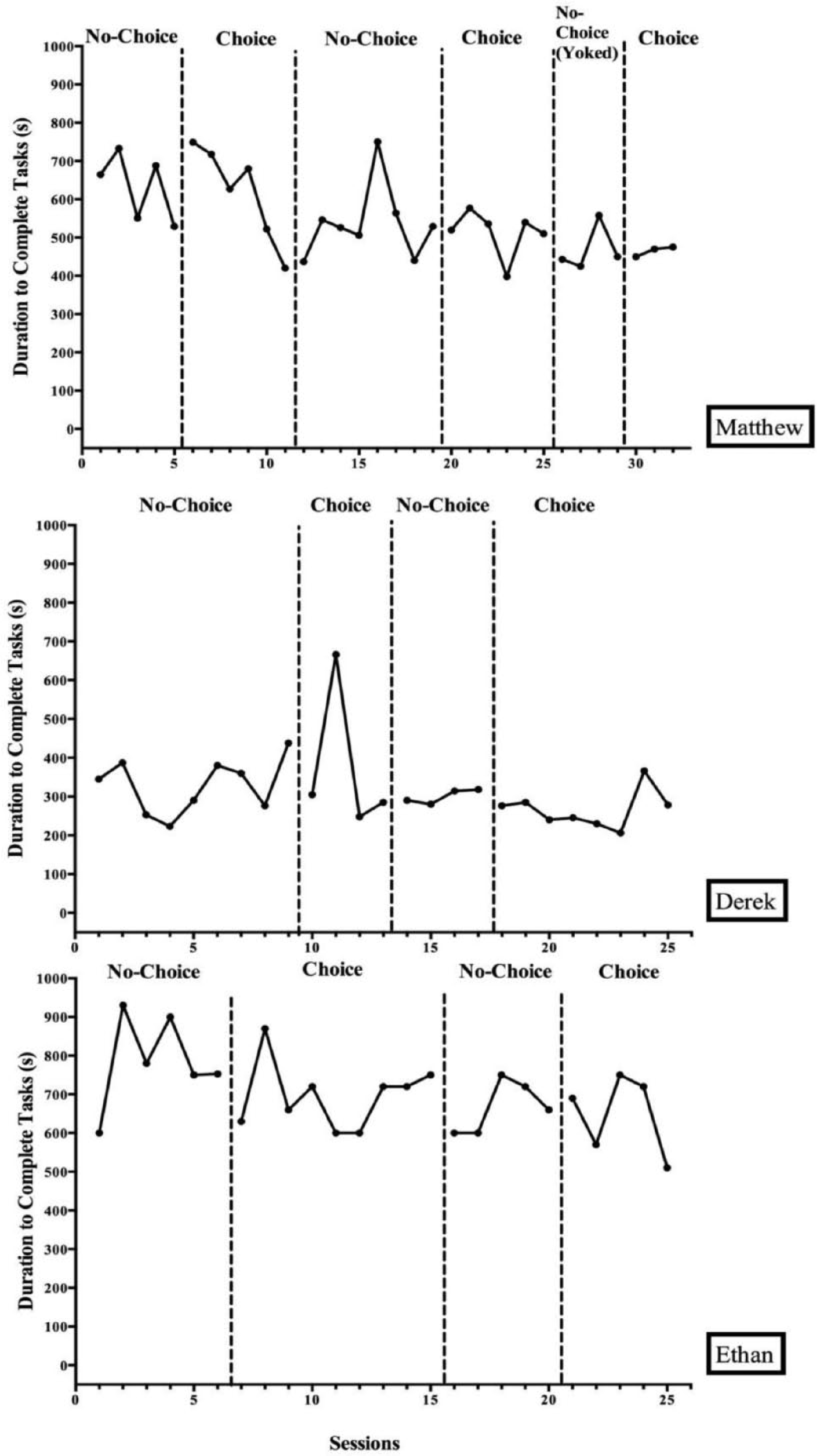
Percentage of intervals of duration for Matthew (top panel), Derek (middle panel), and Ethan (lower panel) during baseline (no-choice) and choice of task sequence conditions.
Figure 5 shows the cumulative number of initial selections across choice and no-choice and the total number of tasks presented across choice and no-choice for Matthew (top panel) and Derek (lower panel). Matthew selected choice across the first four sessions until eight tasks were presented. Throughout the remaining sessions of preference for choice, Matthew selected no-choice. For Derek, choice of task sequence shifted to no-choice of task sequence once work requirements under the choice condition required four tasks (Session 2). Afterwards, Derek continued to select the no-choice schedule for the remaining sessions. Preference for choice was not evaluated for Ethan because his percentage of noncompliance did not decrease during the second choice phase.
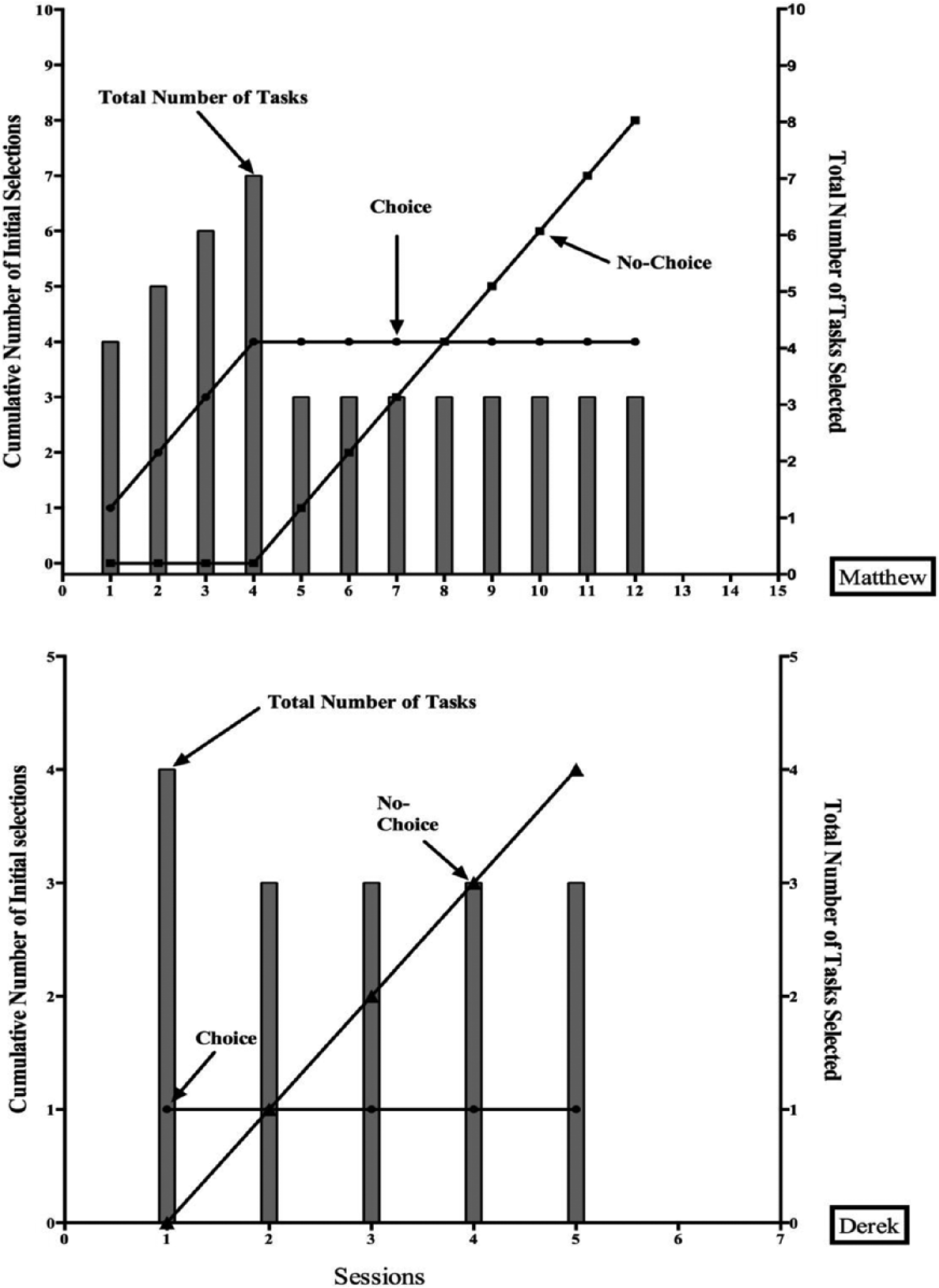
The cumulative number of initial selections and the total number of tasks presented across choice and no-choice for Matthew (top panel) and Derek (lower panel).
The social validity of procedures was assessed using a modified Treatment Acceptability Rating Form–Revised (TARF-R; Reimer & Wacker, 1992), which was presented to 15 instructors at the charter school. The survey consisted of 10 questions and used a 5-point Likert-type survey. Results of social validity measures can be found in Table 2. Findings were positive (M = 4.5, range = 2–5) supporting the ease of the procedures and the importance of the dependent variables. Most instructors (n = 10) indicated that choice of task sequence was likely to make permanent improvements in the students’ behavior.
Modified TARF-R.
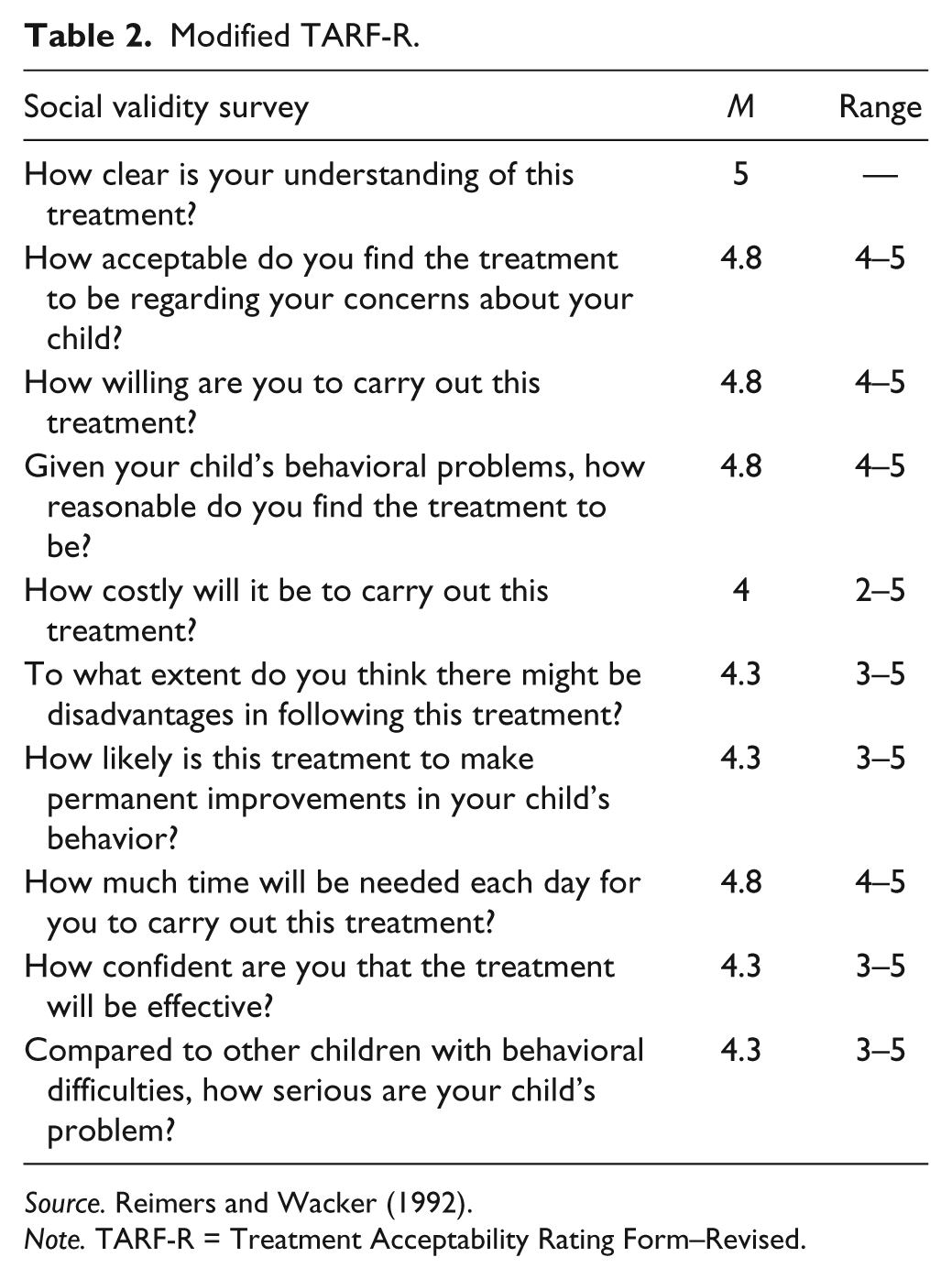
Source. Reimers and Wacker (1992).
Note. TARF-R = Treatment Acceptability Rating Form–Revised.
To assess the social significance of the outcomes, eight video-recorded choice and no-choice sessions were shown to a class of seven graduate students enrolled in a master’s or post master’s degree program in Applied Behavior Analysis at a private university in the Northeast. Graduate students were asked to select the video clip that showed a higher percentage of noncompliant behavior. All respondents selected no-choice videos as showing a higher percentage of noncompliance 100% of opportunities.
Discussion
The purpose of this study was to extend previous research by evaluating the effects of choice of a low-p task sequence on the percentage of noncompliance, task engagement, and duration across three participants diagnosed with ASD or a speech and language impairment. Results aligned with previous research supporting that choice of a low-p task sequence was effective at reducing noncompliant behavior (Kern et al., 2001; Smeltzer et al., 2009). For one participant, although initial treatment effects were promising, the effects could not be replicated during a reintroduction of choice. Furthermore, the results of the present study support previous findings suggesting that choice making itself may have some reinforcing qualities beyond access to the selected stimulus.
The results of the current study differed from past research (e.g., Smeltzer et al., 2009) in that choice of task sequence did not impact percentage of task engagement or duration to complete tasks across participants. For two participants, for whom choice successfully decreased noncompliant behavior, task engagement was moderate to high across conditions. For duration to complete the schedule of low-p tasks, duration remained constant across participants and tasks. Although choice of task order may be effective, the current study found that it may not be efficient.
The current research extended previous research by using a progressive ratio schedule to assess preference for choice of task sequence relative to no-choice using a progressive ratio schedule (Kern et al., 2001; Smeltzer et al., 2009; Tiger et al., 2006). Results indicated that choice of task sequence continued to be preferred over no-choice as work requirements increased for one participant (Matthew) who continued to select the choice of task sequence condition until eight tasks were presented before selecting the no-choice condition. For Matthew, work requirements nearly tripled before his preference shifted to no-choice. For Derek, the value of choice decreased quickly as soon as he was required to complete four tasks during the choice condition.
The current research addressed limitations of the previous research on choice by collecting social validity data across procedures and outcomes of the study, by conducting generalization and maintenance of behavior and reporting on reliability measures of procedures (e.g., Kern et al., 2001; Smeltzer et al., 2009; Tiger et al., 2006). Results from the social validity assessments indicated that teachers and master-level graduate students found the experiment’s procedures and outcomes to be socially valid. Generalization probes were positive for one participant (Matthew) demonstrating that the effects of choice of task sequence on percentage of noncompliance can be generalized to novel teachers.
Results of maintenance probes were positive for two participants (Matthew and Derek) indicating that effects of choice of task sequence on percentage of noncompliance were maintained over a 3- and 4-week period. It is mentionable that for one participant (Derek), percentage of noncompliance reduced to 0% 4 weeks after the completion of the study.
For one participant, who selected the same order of tasks during the choice condition, the order of tasks was yoked under the no-choice condition. An interesting finding was that the level of noncompliance was similar across conditions. This suggests that a particular order of tasks was equally effective as the opportunity to choose the order of tasks for Matthew. Nevertheless, during the evaluation of sensitivity to choice using a progressive ratio schedule, Matthew demonstrated a clear preference for choice even as work requirements increased to nearly triple the no-choice condition.
There are several limitations to the current study. Although choice of task sequence was promising across all participants, treatment effects could not be replicated for one participant, Ethan. Over the course of the study, Ethan’s noncompliant behavior increased within and outside of experimental sessions and, anecdotally, at greater intensity and magnitude. Consequently, changes to his behavior intervention plan were made and may have affected behavior during experimental sessions.
A second limitation was lack of generalization across novel settings for two participants. Future research should consider programming for generalization by providing instruction across environments such as home and community settings. A final limitation of the current study was that noncompliance and task engagement were scored using different measurement systems (i.e., PIR and MTS, respectively). This may have overestimated noncompliance and may have potentially underestimated or overestimated on-task behavior. However, PIR was selected for measuring noncompliance because this type of measurement is more sensitive to behaviors therapists are looking to decrease (Meany-Daboul, Roscoe, Bourret, & Ahearn, 2007).
There are several areas of future research that should be considered. Future research should increase the external validity of findings by assessing the effects of choice on noncompliance with other populations (e.g., typical developing, those with emotional behavioral disturbances). Future research should continue to explore variables that impact preference of choice. The current study found that as soon as work requirements during choice exceeded the no-choice condition, preference switches to no-choice while preference was not impacted until work requirements nearly tripled during choice relative to no-choice for a second participant. Future research should investigate strategies to enhance generalization across tasks (e.g., self-help, vocational tasks) and across other intervention agents (e.g., parents). Future research could conduct a functional assessment on noncompliant behavior to identify function-based antecedent interventions. Future research could also assess the role of task sequence with more tasks. The current study only assessed choice among three tasks, and it remains unknown whether similar outcomes would be found with more tasks. Finally, the parent choice of academic materials remains an under researched area
Footnotes
Authors’ Note
This study is based on a thesis submitted by the first author, under the supervision of the second author, to the Department of Applied Behavior Analysis at Caldwell University for the Master of Arts in Applied Behavior Analysis.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.