
Abstract
Rats play a crucial role in advancing scientific research and contributing to the understanding of various diseases. The striking structural similarity between the rat foot and the intricate anatomy of the human hand has drawn scientific interest to these animals. However, detailed morphometric and functional analyses of the adult Sprague–Dawley rat foot, including its dimensions, range of motion, and grip strength, remain limited in the literature. We aimed to examine the hind feet of 42 adult male Sprague–Dawley rats, each weighing 300–350 g. Using a multifaceted approach, we inspected hind paw morphology and performed descriptive statistical analyses of foot dimensions (a), measured unilateral hind foot grasping strength (b), assessed joint mobility (c), and examined the microscopic appearance of the hind foot third digit (d). One animal was additionally used to observe the hind limb skeletal architecture using microcomputed tomography. This study provides critical normative data regarding the structure and function of the hind foot in adult Sprague–Dawley rats, thereby facilitating future studies on musculoskeletal diseases.
Introduction
Rats have long been considered the cornerstone of laboratory research and have been used in various experimental research models.1 –5 Because of their genetic similarity to humans, these small mammals represent a valuable analogy for studying a broad range of physiological and anatomical processes.6 –8 In particular, the Sprague–Dawley rat has attracted considerable attention in recent studies.9,10
Although Wistar rats are the predominant strain used in animal musculoskeletal research,11 –13 the Sprague–Dawley rat strain might be more suitable owing to its larger hind limbs.14,15 The hind foot is an experimental model used in numerous studies;16 –19 however, only one study has examined the Sprague–Dawley rat foot tendon system. 20
Therefore, a notable gap remains in the detailed morphometric and functional characterization of the adult Sprague–Dawley rat feet.21,22 This limitation is particularly relevant to musculoskeletal research.23 –25 Providing normative data on the hind limb dimensions of Sprague–Dawley rats might encourage more scientists to choose this rat strain for experimentation. To date, larger animals, often primates, have been used because their larger surgical fields require fewer microsurgical skills. 26 Herein, we describe a model with the potential to replace primates in these experimental procedures.
This study included a wide range of analyses, descriptive statistics of foot dimensions, hind limb grasping strength measurements, and evaluations of joint mobility at the distal interphalangeal (DIP), proximal interphalangeal (PIP), and metatarsophalangeal (MTP) joints of the Sprague–Dawley rat hind foot third digit. Furthermore, we present the microscopic histology of the rat digit and the macroscopic skeletal architecture using microcomputed tomography (mCT).
Materials and methods
Animals
This experimental study was conducted on 42 adult male Sprague–Dawley rats (F3 generation; Envigo, USA) aged 10 weeks and weighing 300–350 g. All animals were bred in our facilities, maintained under specific pathogen-free conditions, and monitored as recommended. 27 The animals’ health was monitored according to FELASA recommendations 28 using IDEXX GmbH (IDEXX BioAnalytics, Germany). The rats were housed in open cages with controlled access. Room temperature (20–22℃) and humidity (45–55%) were checked daily. The animals had ad libitum access to standard rodent food (4RF25; Mucedola, Scobis, Italy) and water. Weekly husbandry and cage maintenance were performed by experienced animal care personnel. A stable temperature was maintained using an HVAC thermostat-controlled system. Lighting was maintained below 325 lux on a 12-h light–dark circadian cycle. Noise was maintained at <85 dB with no ultrasonic noise or vibration interference. The animals were housed at densities recommended by EU Directive 2010/63/EU for the protection of animals used for scientific purposes. The experimental procedures were approved and licensed by competent institutional and national veterinary authorities (license no: 476351[1834], 13.12.21).
An organizational chart of all the conducted procedures is presented in Figure 1.
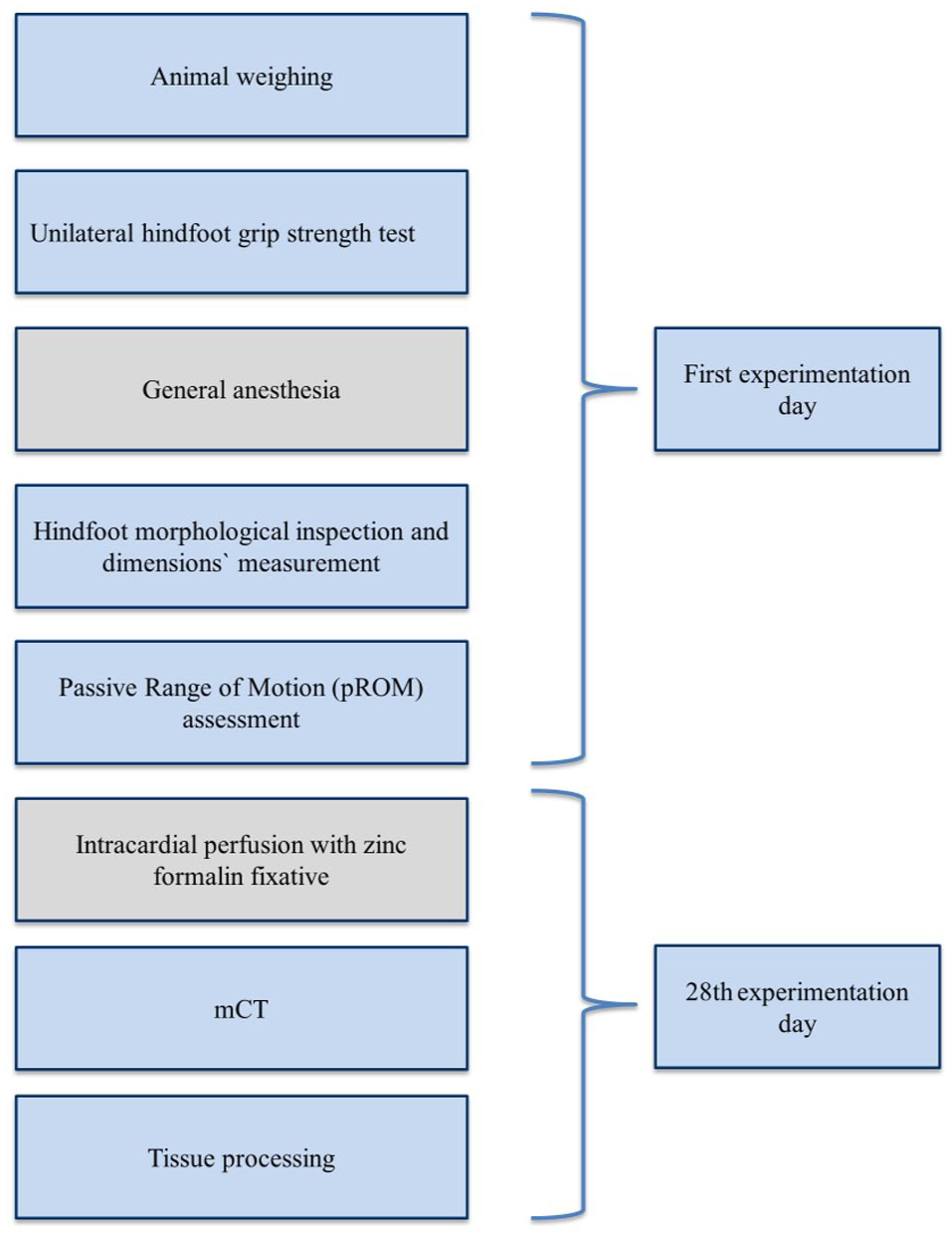
Flowchart of the conducted procedures and measurements on Sprague–Dawley rats.
Unilateral hind foot grip strength test
The hind foot grip strength test used a push–pull digital dynamometer affixed to an 8-kg metal base measuring 15 cm×15 cm×35 cm (Supplemental Figure 1 online). A triangular pull bar (8 cm×8 cm×8 cm) was attached to the end of the apparatus. The animals were positioned horizontally and secured by their trunk and lumbar regions. The middle finger of the operator was placed behind the popliteal region of the hind limb, whereas the index finger was placed on the thigh just above the knee joint to provide gentle stabilization during measurement. The hind paw-grasping reflex was activated by gently pressing the paw against the bar. For each measurement, the hind limb was positioned horizontally relative to the dynamometer bar, with the torso maintained above bar level and the paw–body axis angle set between 15° and 25°, corresponding to the normal walking posture. 29 Peak tension, recorded immediately before grip loss, served as the measured force (Figure 2). Two observers ensured that the animals’ movement remained parallel to the bar with proper toe grasping. The test used a precise sensor and an electronic device with a 1000 Hz sampling rate. The animals underwent a one-week familiarization period to optimize their holding positions. All animals exhibited normal hind paw grasping reflexes.
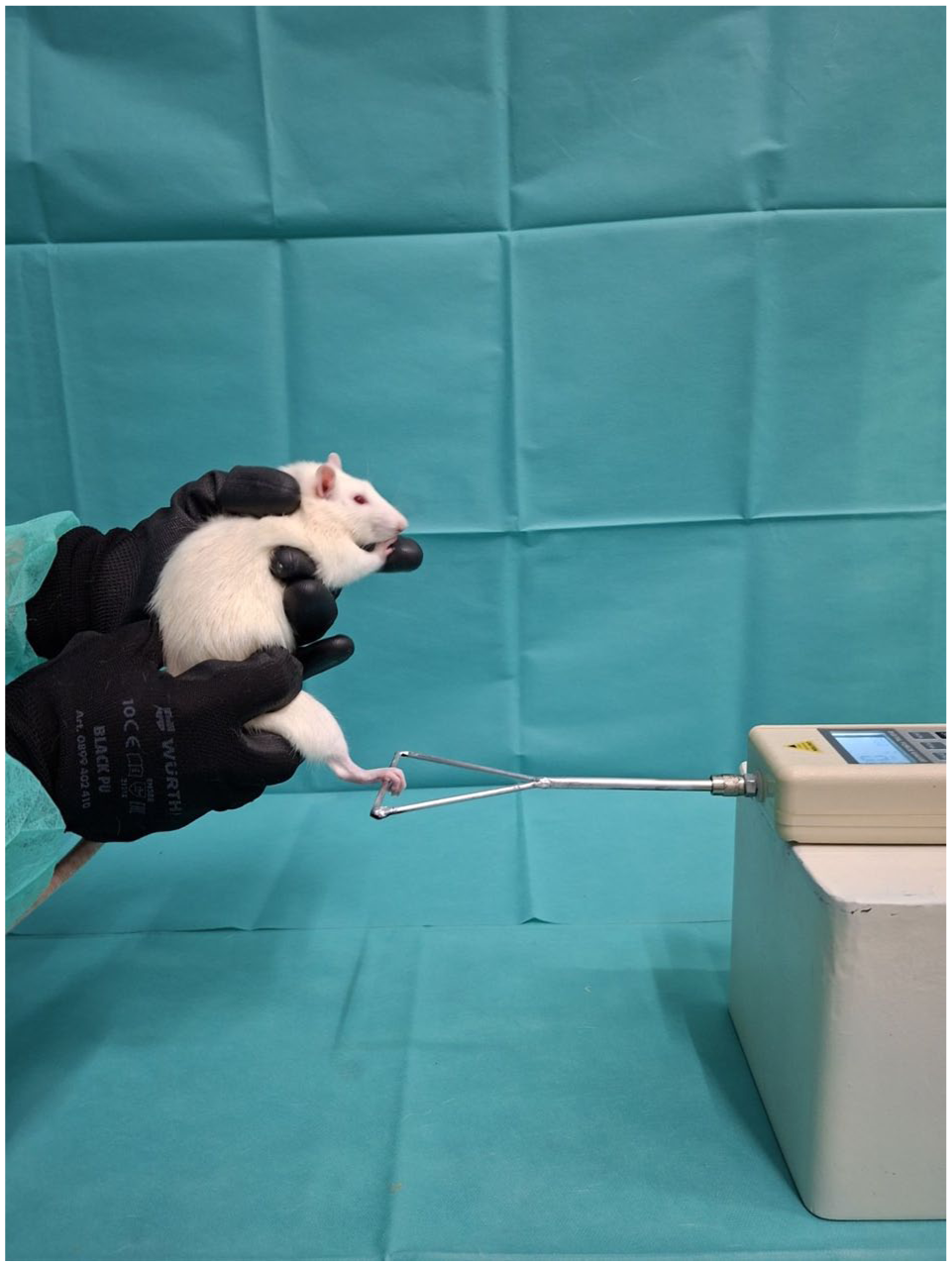
Unilateral hind foot grip strength test.
The hind foot grip strength test was conducted using a modified approach. Initially, animals were handled by grasping the skin on the back and tail; however, this method did not elicit full paw-grasping reflexes. Therefore, a “babysitting” holding position (Supplemental video) was adopted, in which the animals appeared more secure and demonstrated more consistent grasping behavior. The test was repeated thrice for each animal, and the values presented represent the mean of these three trials.
Inspection of hind paw morphology and measurement of Sprague–Dawley rat hind foot dimensions
For feet dimensions, length and width were measured along two axes using a digital caliper with a precision of two decimal places. Three individuals performed the measurements: one held the animal, one recorded the measurement, and the third ensured proper conduction of the measurement. The observations were obtained as pre-experimental (control) measurements within a protocol designed to study tendon adhesions. Accordingly, general anesthesia was administered, with induction achieved using a 0.3 ml/100 g mixture of 2 ml ketamine hydrochloride 100 mg/ml (Ketamidor 100 mg/ml; Richter Pharma AG, Budapest, Hungary), 1.2 ml xylazine hydrochloride 20 mg/ml (xylapan 20 mg/ml; Vetoquinol, Paris, France), and 6.75 ml saline. Given the measurement’s high sensitivity, the digits were extended and carefully aligned with the metatarsal bones to ensure a standardized foot position and minimize variability. Two dimensions were recorded for each hind foot using digital calipers (Supplemental Figure 2). Length was defined as the distance from the os calcaneus to the end of the third digit distal phalanx and width as the distance between the first and fifth MTP joint.
Third Sprague–Dawley rat hind foot digit passive range of motion (pROM) measurement
The assessment of third-digit hind foot joint mobility required full joint relaxation and elimination of voluntary muscle activity. Therefore, general anesthesia was administered according to the previously described protocol. Following a four-week period dedicated to the experimental tests, the animals were euthanized according to ethical guidelines for animal research.
pROM of the third digit was evaluated at the DIP, PIP, and MTP joints using a digital goniometer. The starting position (0°) was defined as alignment of the digit with the metatarsal bone.
Measurements were performed by two operators to ensure stability and accuracy. The hind limb was positioned in a true lateral orientation over a reference sheet. One operator stabilized the proximal segment with one hand, while using the other hand to manipulate the distal segment, using a plastic ruler along the flexor surface to induce extension and along the extensor surface to induce flexion of the measured joint. The second operator marked the angular limits of motion, which were subsequently measured using a digital goniometer to determine the joint’s pROM (Supplemental Figure 3(a) and (b). The pROM for each joint was calculated as the sum of passive extension and flexion angles, 30 which were also analyzed separately.
Tissue processing
The animals were anesthetized, as previously described, and, under deep anesthesia, were intracardially perfused with a zinc formalin fixative (Z2902; Sigma-Aldrich, Darmstadt, Germany). Both hind limbs were harvested and fixed at 4℃ for 48 h. The hind feet of one animal were examined using mCT.
The tissue processing protocol was based on the procedure described by Wong et al. 31 After fixation post-euthanasia, the entire third hind toe, including the metatarsal, phalanx, and claw, was decalcified with 20% EDTA solution for eight weeks, with the solution renewed every four days. Subsequently, all specimens underwent standard histological processing where the material was embedded in paraffin wax and sectioned into 7-μm sections. Hematoxylin and eosin staining was applied to all sections.
During histological examination of the slides, basic anatomical landmarks were marked, including the presence of bone and bone marrow, number of phalanges, and quality of the overlying epithelium (ventral digital and foot pad epithelia). The Motic EasyScan one-slide scanner was used with a Plan Apochromatic objective (20×/0.75) to maximize both color accuracy and resolution. The specimens were examined under various magnifications using Windows 11 Motic application.
mCT
One specimen was imaged using mCT performed using a SkyScan 1172 CT scanner (Bruker, Aartselaar, Belgium). Images were acquired at 70 KeV and 100 µA with a 0.5-mm aluminum filter and 10-μm voxel size. Datasets were reconstructed using the NRECON software (Bruker). Three-dimensional (3D) models of the ankle joints were acquired using the CTvox software (Bruker) (Supplemental Figure 4).
Measurements were performed using DataViewer (Bruker) software to set 3D distance reference points at each anatomical site, all located within bone tissue. Morphometric measurements were performed on one right and one left specimen.
Data analysis: sample size and reference interval estimation
The adequacy of the sample size for this normative, single-cohort study (no treatment/control groups) was assessed using an estimation-precision approach rather than a between-group power. Although CLSI/IFCC EP28-A3c recommends ⩾120 individuals for fully non-parametric 95% reference intervals, sample sizes in animal studies are often constrained. 32 Accordingly, approximate reference-interval estimation with ~40–60 subjects is acceptable when robust/parametric methods and confidence intervals (CIs) for the reference limits are provided. Assuming a standard deviation (SD) of 0.2 Νewton (N) 33 and a target precision of 5–7% (E≈0.05–0.07 N), the required sample size is N = (1.96×SD/E)²≈31–62; thus, N = 42 falls within this range.
The reference interval for a parameter is defined as the range encompassing the central 95% of values from an apparently healthy population. For a double-sided reference interval, where both low and high values are considered abnormal, the limits of normality correspond to the lower (2.5th percentile) and upper (97.5th percentile) bounds.
Reference intervals can be calculated using two methods: (a) parametric methods assuming a normal distribution and (b) the non-parametric percentile method.
For the parametric approach, the limits of normality were defined as mean−1.96 × SD (lower limit) and mean+1.96 × SD (upper limit).
In the percentile method, the lower and upper limits were defined as the 2.5th and 97.5th percentiles, respectively. In cases of violation of skewness, kurtosis, or normal distribution of measurements, Box–Cox transformation was performed. Left and right comparisons were performed using the paired sample t-test and Wilcoxon signed-rank test.
Quantitative and qualitative variables are presented as means, medians, SDs, interquartile ranges, and frequencies and percentages. The Kolmogorov–Smirnov test was used for normality analysis of the quantitative variables.
All tests were two-sided, and statistical significance was set at p < 0.05. All analyses were performed using the statistical packages SPSS version 21.00 (IBM Corporation, Somers, New York, USA) and MedCalc Statistical Software version 20 (MedCalc Software Ltd, Ostend, Belgium).
Results
Symmetrical hind foot dimensions observed in Sprague–Dawley rat measurements
The right and left hind foot length were 42.03 ± 0.06 (41.90–42.12) mm and 42.03 ± 0.07 (41.90–42.13) mm, respectively. The right and left hind foot width were 11.43 ± 0.06 (11.30–11.52) mm and 11.44 ± 0.07 (11.30–11.52) mm, respectively (Supplemental Table 1).
Similar grip strength observed in both hind limbs
The mean hind limb grip strength was measured unilaterally using the newly described “babysitting” holding method.
The mean right hind limb grip force (F) from 42 measurements was 2.32 ± 0.07 (range, 2.20–2.40) N, whereas the mean left hind limb grip force was 2.32 ± 0.06 (range, 2.20–2.40) N.
Distribution of footpads along the plantar aspect to the metatarsal area
We inspected 84 hind paws on 42 Sprague–Dawley rats. All hindfeet included six footpads. The first footpad was placed between the first and second metatarsal ray, the second between the second and third metatarsal ray, the third between the third and fourth metatarsal ray, and the fourth between the fourth and fifth metatarsal ray. The fifth footpad was localized over the hypothenar and the sixth over the thenar (Supplemental Figure 5).
No significant right–left differences in hind limb MTP, PIP, and DIP joint flexion and extension
pROM measurements for the third-digit joints of the right and left hind feet demonstrated consistent and symmetrical values. The 95% CIs for the pROM of the right and left hind foot joints are presented in Table 1. The lower limits of the CIs for the right hind foot were 94.30° for MTP extension, 104.9° for MTP flexion, 40.43° for PIP extension, 89.2° for PIP flexion, 21.21° for DIP extension, and 44.33° for DIP flexion (Supplemental Table 2). Similarly, the corresponding lower limits for the left hind foot were slightly lower at 94.01° for MTP extension, 104.8° for MTP flexion, 40.12° for PIP extension, 89.4° for PIP flexion, 21.18° for DIP extension, and 44.18° for DIP flexion (Supplemental Table 3).
Sprague–Dawley rat third hind limb digit passive range of motion: right versus left (95% confidence interval (CI)).
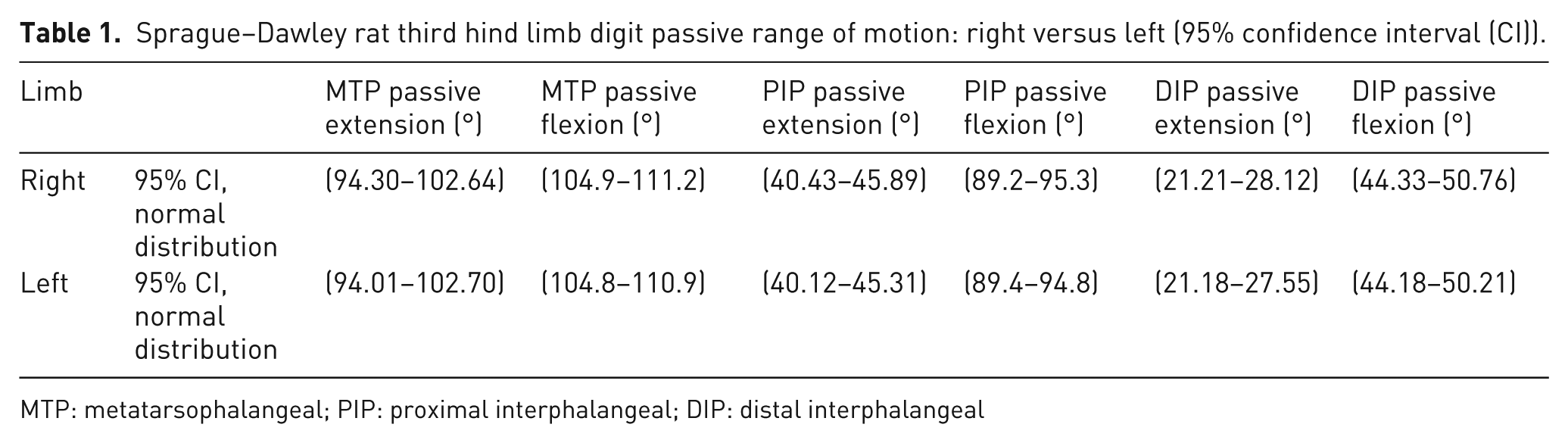
MTP: metatarsophalangeal; PIP: proximal interphalangeal; DIP: distal interphalangeal
No statistically significant differences (p > 0.05) were found between the right and left hind limbs for all measurements using parametric and non-parametric analyses (Table 2 and Supplemental Diagrams 1– 3).
Comparison of measurements between right and left hind Sprague–Dawley rat limbs using parametric and non-parametric analyses.
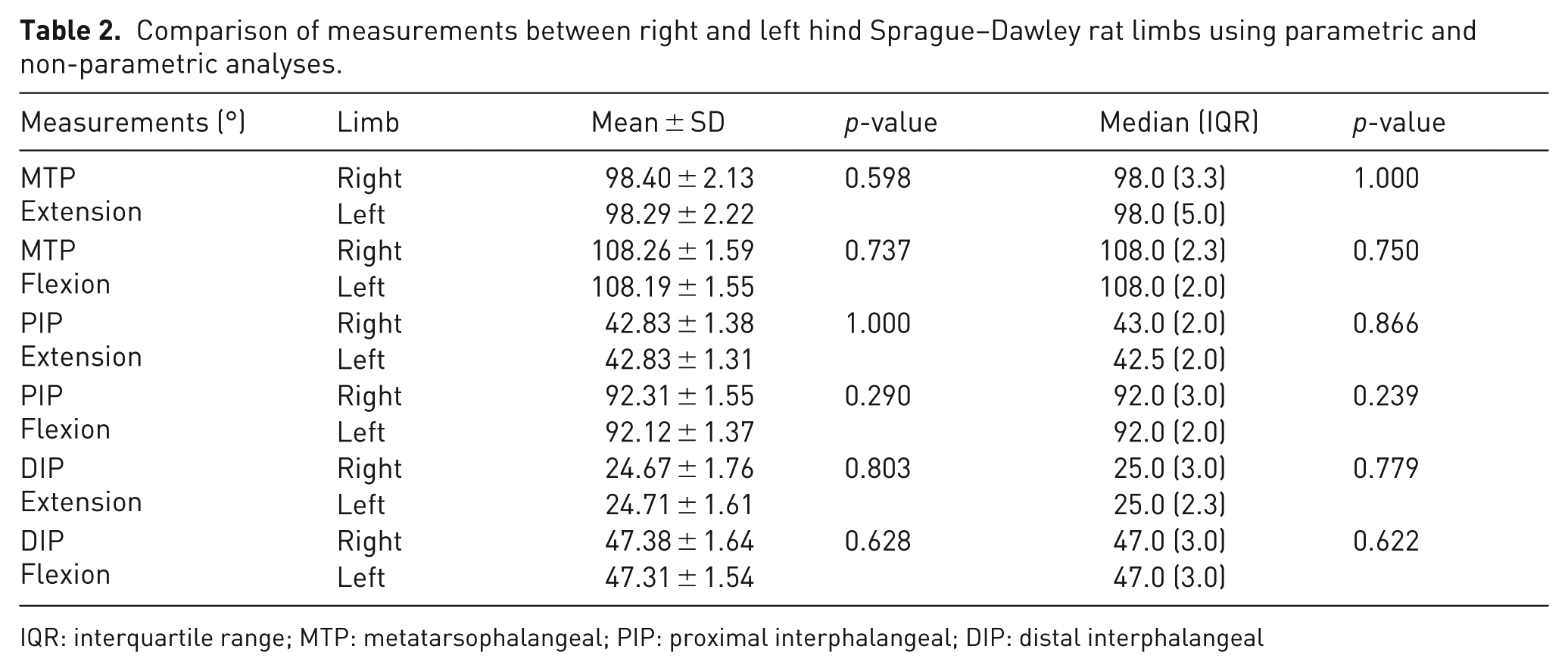
IQR: interquartile range; MTP: metatarsophalangeal; PIP: proximal interphalangeal; DIP: distal interphalangeal
Histological features of the rat hind limb
Upon examination of the sagittal plane of the hind limb, hematoxylin and eosin staining revealed distinct anatomical landmarks, including the metatarsal bone and bone marrow, along with a complete count of the phalanges categorized as proximal, middle, and distal phalanges. The tendon structure was also evident and contributed to the mechanical integrity of the foot. The overlying epithelium was assessed, revealing ventral digital epithelium with hair follicles and a robust footpad epithelium, indicative of its protective function. Moreover, the examination highlighted the presence of glabrous skin on both the footpad and metatarsal regions along with the muscle and fascia, underscoring the comprehensive nature of the anatomical and functional composition of the tissue (Figure 3).
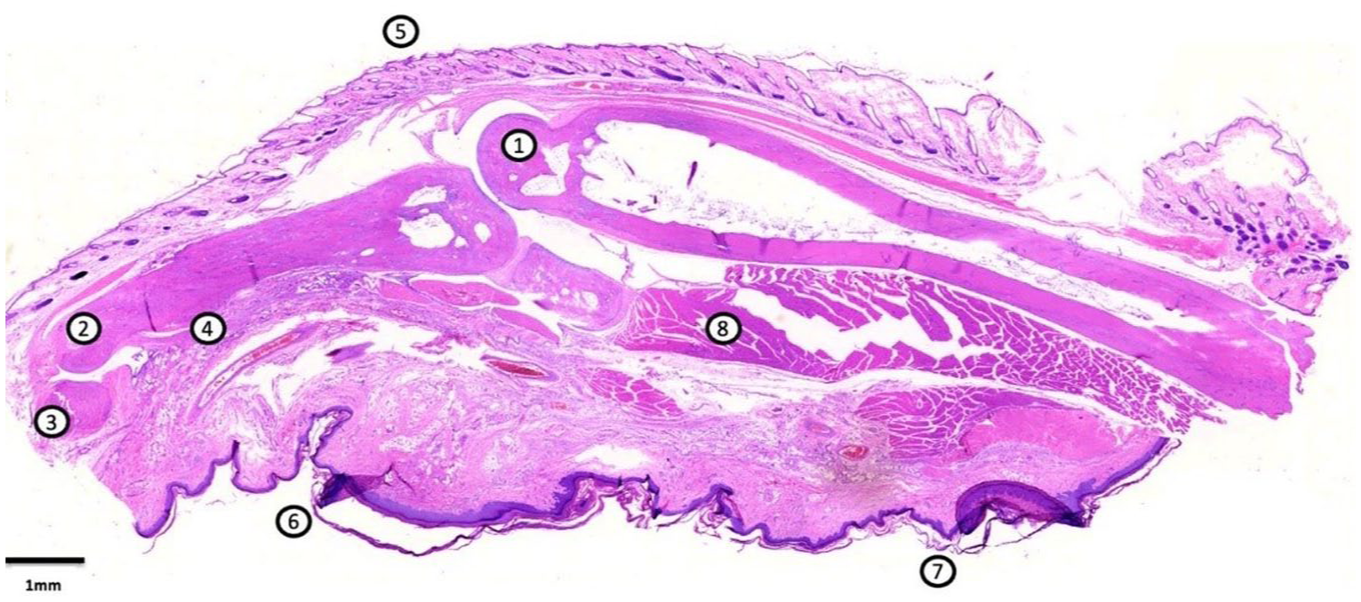
Regions of the hind paw in the sagittal plane.
mCT analysis reveals detailed morphometric Sprague–Dawley rat hind foot dimensions
Figure 4 presents the 3D mCT imaging of the left hind foot of an Sprague–Dawley rat. Morphometric analysis was performed using Dataviewer (Bruker) software with 3D distance reference points for each anatomical site. The left hind foot measured 41.642 mm in length and 10.684 mm in width, whereas the right foot measured 41.526 mm in length and 12.856 mm in width. The right and left calcaneal dimensions were 9.699 mm and 9.881 mm, respectively, and distal tarsal measurements were 3.585 mm and 3.972 mm, respectively. Third metatarsal lengths were comparable, measuring 27.971 mm on the left and 28.06 mm on the right (Supplemental Table 4).
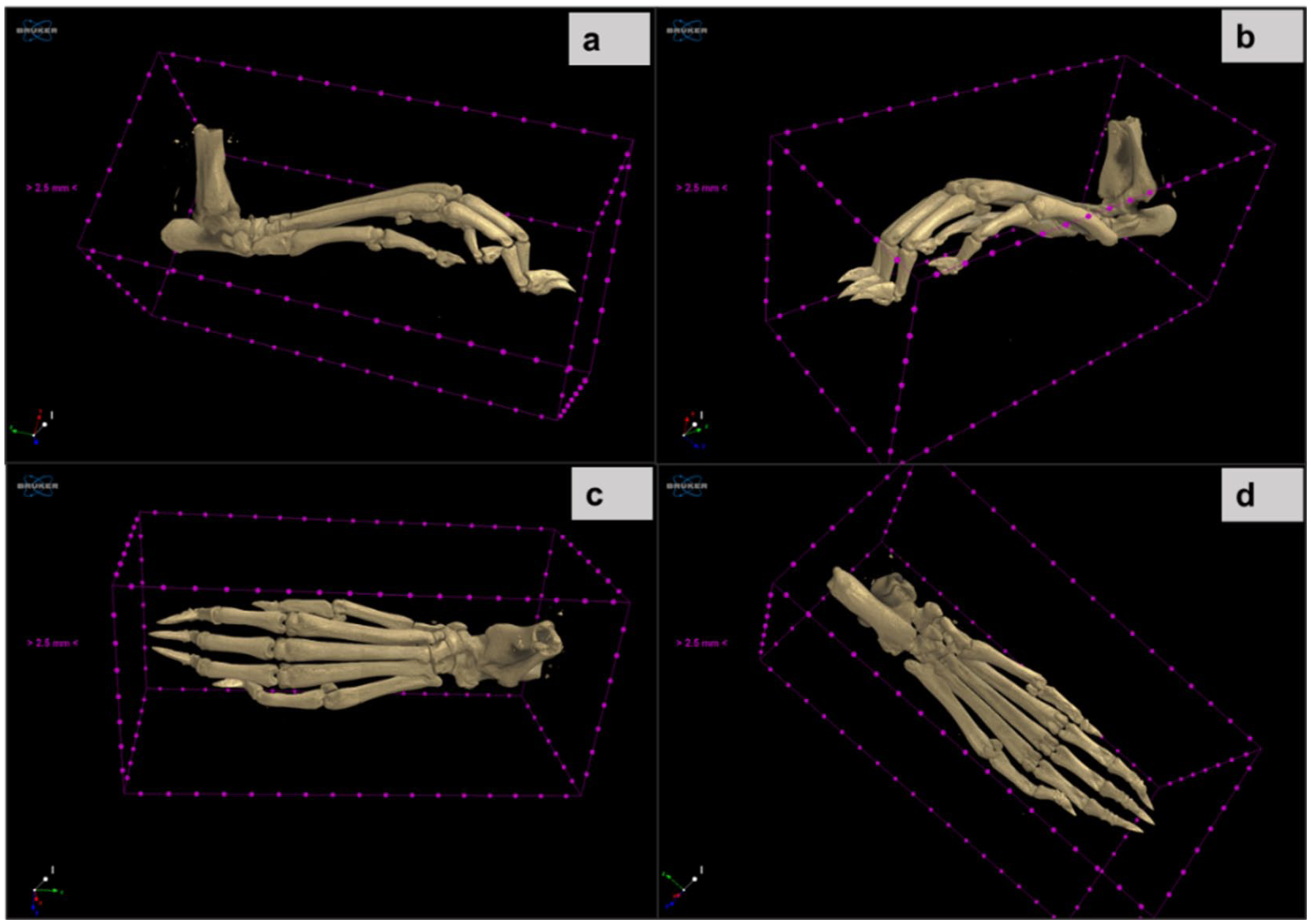
3D microcomputed tomography left hind Sprague–Dawley rat foot imaging reconstruction. (a) True lateral view, (b) lateral view, (c) dorsal view, (d) plantar view.
Discussion
Although rats are frequently used in scientific research, further analysis of the detailed morphokinetic characteristics of the Sprague–Dawley rat foot may provide valuable information. Expanding data on hind limb function and mobility could enhance the utility of rats in studies of hand-related conditions.34 –36
The results of the present study provide specific normative data regarding the geometric dimensions and mechanical properties of the hind feet of Sprague–Dawley rats. The animals exhibited a narrow range of SD in body weight and uniformity in foot length and width. Minimal right–left differences further support the reliability of the measurements and the symmetrical nature of this anatomical region (Table 2). Although the caliper-based measurements were manually performed, three operators participated in each session to ensure accuracy and minimize human error. The very low SD observed across all measurements supports the consistency of this procedure. Nonetheless, digital image analysis could provide an operator-independent and highly precise alternative for extracting morphometric parameters directly from photographs. The integration of such techniques represents a simple methodological refinement for future studies, improving precision and reproducibility while validating manual measurements.
The forelimb grip strength assay, pioneered by Bertelli and Mira, 37 is a well-established functional method for evaluating peripheral nerve injury and repair. Although the forelimb test is widely used,38 –40 this study introduces a distinctive approach that focuses on a unilateral hind limb grasping test. An initial challenge was reliably eliciting the hind paw grasping reflex when animals were held by the dorsal skin and tail. By modifying both the holding technique and the grasping maneuver (“babysitting” hold), we provided a more secure, low-stress posture, enabling consistent performance. We also adapted the instrument: instead of the conventional T-bar (bilateral) or alternating L-bars (right/left) used for unilateral testing, 41 we implemented a triangular bar to eliminate bar exchanges, thereby reducing handling time and stress between consecutive trials.
Maurissen et al. 33 systematically examined the methodological and operational determinants of rodent grip strength testing, highlighting that recorded forces can be strongly affected by apparatus configuration and key parametric factors. Guided by these observations, our unilateral hind foot protocol was designed to minimize avoidable sources of variability, standardize the horizontal pull, stabilize the limb and torso to reduce vertical force components, and average three trials per animal, thereby addressing the angle/device and handling-related effects emphasized by Maurissen et al. 33 Nevertheless, in the referenced study, comparisons across sampling rates (20, 1000, and 5000 Hz) were performed under medium trial-speed conditions, whereas comparisons across trial execution speeds (slow/medium/fast) were conducted at a fixed sampling rate of 5000 Hz. This is further limited by differences in the experimental design, as that study used 14-week-old female Fischer-344 rats using a grid-based system, whereas we examined 10-week-old male Sprague–Dawley rats using a bar-type unilateral setup. With these caveats, our hind limb forces acquired at 1000 Hz with a steady, slow pull (~2.20–2.40 N) are of a similar order to the previously reported hind limb values at low sampling frequency (≈240 g at 20 Hz, ≈2.35 N). 33 Any differences at 1000 Hz may plausibly reflect differences in sex, age/body weight, strain, apparatus geometry, and trial execution characteristics, underscoring that absolute forces are method- and setup-specific and should not be considered directly interchangeable across protocols.
To further contextualize our normative unilateral hind foot grip force values, we compared them with recently published sham hind limb data obtained from age- and sex-matched male Sprague–Dawley rats. 42 Zheleznova et al. evaluated hind limb function in 8–10-week-old male Sprague–Dawley rats (250–300 g) using a grid-based Ugo Basile grip-strength meter and reported a sham hind limb grip strength of 191.13 ± 11.98 gf (≈1.87 ± 0.12 N). In our intact 10-week-old male Sprague–Dawley rats, which had a slightly higher body mass (300–350 g), unilateral hind-foot peak forces averaged 2.32 N (≈237 gf; range, 2.20–2.40 N). Although direct numerical comparisons between studies should be made cautiously because of differences in the testing platform, animal conditions, and handling/positioning, our values fall within a comparable physiological range, and the modestly higher forces are consistent with the greater body weight of our cohort. Overall, this cross-study agreement supports the external validity of the present normative dataset, while reinforcing that absolute grip force values are method- and device-dependent and should be interpreted within the context of the specific protocol used.
Functional dynamometry offers a practical measure of musculoskeletal diseases, especially tendon adhesions, in which reduced tendon gliding and disrupted load transfer present as restricted joint excursions and diminished effective forces. 43 In the closest Sprague–Dawley rat model, McCombe et al. 20 quantified impairment ex vivo as the work of flexion using a universal testing machine, providing a clear mechanical benchmark but not a physiological, longitudinal readout. Unlike this ex vivo metric, our approach measures the peak voluntary force in awake animals via in vivo bar-type dynamometry under standardized, low-stress handling, enabling non-terminal, repeat assessments under physiological loading. Rather than replacing ex vivo metrics, these complements can be paired with adhesion models to track functional consequences over time. The Sprague–Dawley rat offers two practical advantages for such work: (i) calm temperament and easy handling that suit cooperative limb grip testing and (ii) a slightly larger body size than Wistar rats, facilitating experimental surgery with better access and precision.44,45
Furthermore, pROM measurements in the Sprague–Dawley rat hind paws (MTP, PIP, and DIP) provided comprehensive and side-independent normative data. Parametric and non-parametric analyses confirmed high right–left symmetry across all joints (Table 1), supporting the use of either limb in biomechanical and comparative studies. Flexion exceeded extension at every joint, with the MTP showing the largest arcs and the DIP showing the smallest (Table 1). The Kolmogorov-Smirnov (KS) test indicated non-normality for most distributions, with the DIP extension being the sole exception, and skewness/kurtosis showing mild deviations from symmetry. The pROM ranges were consistent and relatively narrow. For a like-for-like comparison in humans, Mallon et al. reported a pROM spanning approximately metacarpophalangeal (MCP) joint flexion of 94–107°, PIP flexion of 106–112°, and DIP flexion of 54–80°, with values varying by digit and proximal joint position, frequent hyperextension (negative extension values), and no effect of handedness. 46 These data echo two organizational features observed in Sprague–Dawley rats: flexion-dominant arcs and a proximal-to-distal taper with the smallest arc distally, although absolute angles differ between species, thereby supporting the Sprague–Dawley rat as a relevant comparative model for joint mechanics and tendon-related pathology.
Refining the Sprague–Dawley rat hind limb anatomy and function tightens the study design and supports the 3Rs47,48 by allowing small-animal work to carry most of the evidentiary load, reserving non-human primates for targeted, late-stage confirmation where anatomy and surgical handling must closely mirror the human condition. This aligns with adhesion literature: most anti-adhesion approaches have been evaluated in animal models, with few human trials; early postoperative mobilization remains the only clinically justified practice; and primate models show the closest resemblance to humans, whereas rabbits, dogs, and chickens are less directly translatable. 49 By providing side-independent pROM baselines and repeatable in vivo grip dynamometry in Sprague–Dawley rats, we define standardized longitudinal endpoints that improve comparability across models and help ensure that escalation to primates is minimal, justified, and maximally informative.
This study has some limitations. Validation of the “babysitting” holding position was limited to within-operator repeatability (three trials per animal in a single laboratory); interoperator reproducibility and benchmarking against an established grip strength method were not performed. This technique relies on consistent handling, positioning, and animal cooperation, which might introduce subjectivity despite the standardization described in the Supplemental video. Moreover, grip strength is sensitive to behavioral and operational factors, and the “babysitting” technique relies on operator handling skills, consistent positioning, and animal cooperation. Therefore, some subjectivity and reduced replicability across laboratories might persist despite the described standardization.
This study used male Sprague–Dawley rats; other strains might differ in anthropometrics and grip performance profiles, and sex-related differences are also likely to affect performance. Finally, pROM assessment was confined to the third digit (DIP/PIP/MTP) to provide a standardized central-ray dataset; however, this does not capture whole-foot ROM or the behavior of other phalanges. Therefore, translation to the overall hind paw pROM is limited. Future work should extend the validation across platforms, examine sensitivity to acquisition parameters, and broaden kinematic assessment to include additional strains, female sex, and foot-level (including active) ROM measurements.
Despite these limitations, this study provides normative data and a reproducible measurement framework that can be extended to other sexes, strains, and dynamic endpoints in the future.
Conclusion
In summary, we provide side-independent normative datasets for the Sprague–Dawley hind limb together with a new hind limb grip strength protocol dynamometer bar suitable for repeat physiological assessments. These resources are intended to facilitate comparable study designs using small animal models. Although the present work is necessarily constrained in scope, it offers a modest, practical step toward harmonizing methods in tendon and musculoskeletal research. Future studies incorporating females, additional strains, dynamic endpoints, and direct head-to-head comparisons with existing in vivo metrics are important to test generalizability and strengthen translational relevance. These contributions are intended to support careful, incremental progress in the field and to encourage judicious escalation across species in line with the 3Rs.
Supplemental Material
sj-docx-1-lan-10.1177_00236772261442034 – Supplemental material for Normative data on the hind foot of Sprague–Dawley rats
Supplemental material, sj-docx-1-lan-10.1177_00236772261442034 for Normative data on the hind foot of Sprague–Dawley rats by Zoi Tzimorota, Ioanna Abba Deka, Tryfon Chatzimanou, Mavrommatis-Parasidis Panagiotis, Marietta Armaka, Evangelos Rinotas, Dorothea Kapoukranidou, Adam J. Reid, Panagiotis Givissis and Anastasia Tsingotjidou in Laboratory Animals
Footnotes
Acknowledgements
The authors wish to acknowledge the assistance of the Head of the Animal Models of Human Disease Unit, Experimental Surgery Unit, Faculty of Medicine, Democritus University of Thrace and the Deputy Chief Veterinarian, Animal Facility of the Laboratory of Anatomy, Histology and Embryology, School of Veterinary Medicine, Aristotle University of Thessaloniki, Mrs. Alexandra Gkrouzoudi, for her valuable help in performing CT scans of the animals and euthanizing the animals with perfusion. The authors also acknowledge the radiologist Mr. Loukas Dagdillelis and the CT scanner technologists of the Radiology Department of G.N.G. Papanikolaou, Mrs. Konstantina Kizaki, and Anastasios Popsis, who performed the CT scans of the rats with intravenous administration of the contrast medium after licensing the procedure. The authors also thank Editage (![]() ) for English language editing.
) for English language editing.
ORCID iDs
Ethical considerations
The procedures involved in the experiments were approved and licensed by the competent institutional and national veterinary authorities (license no: 476351[1834], 13.12.21).
The animal study protocol was approved by the Institutional Review Board (Ethics Committee) of Aristotle University of Thessaloniki (protocol number 4556, 07.07.2022).
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Author contributions
Z.T.: conceptualization, establishment and implementation of the study protocol, tissue processing, and writing;
I. A.D.: tissue processing;
T. C.: implementation of the study protocol and tissue processing;
P. M.P.: implementation of the study protocol and tissue processing;
M. A.: conducting and analyzing mCT;
E. R.: conducting and analyzing mCT;
D. K.: conceptualization, establishment of the study protocol, and review;
A. J.R.: establishment and implementation of the study protocol and review;
A. T.: establishment and implementation of study protocol, tissue processing, and review;
P. G.: establishment and implementation of the study protocol and review.
All authors read and approved the final manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Original data underlying this study are available from the corresponding author upon reasonable request.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.