
Abstract
Accurate and rapid aerodynamic prediction is essential for projectile trajectory simulation and digital twin driven exterior ballistic systems, where conventional CFD methods are computationally expensive and difficult to deploy in real-time applications. To address this challenge, this paper proposes a primary-residual dual-stage surrogate modeling method based on a multilayer perceptron (MLP). A primary prediction model for aerodynamic parameters is constructed using CFD simulation data, where Mach number and angle of attack are used as input variables to establish the global nonlinear aerodynamic mapping. By introducing a residual learning mechanism, a compensation model is established to address fitting deviations in highly nonlinear regions, thereby correcting the nonlinear biases of the primary model predictions. The residual network further captures localized nonlinear discrepancies not fully resolved by the primary model, significantly improving prediction accuracy in high-Mach-number and large-angle-of-attack regions. Comparative validation against polynomial fitting, RBF, and single-stage MLP models shows that the proposed method achieves the best overall performance. For example, the RMSE is reduced from 2.91 to 0.87 for lift prediction and from 0.634 to 0.086 for pitching moment prediction. Overall, the proposed model reduces the average RMSE by approximately 50% across all aerodynamic parameters, demonstrating stronger robustness, improved generalization capability, and practical engineering applicability for digital twin based projectile exterior ballistic prediction.
Keywords
1. Introduction
Digital Twin is a dynamic virtual model constructed through digital means to simulate and describe the attributes, behaviors, and operational rules of a physical entity across multiple dimensions, different temporal and spatial scales, interdisciplinary domains, and encompassing various physical quantities in a real environment. 1 To cope with the increasingly complex future battlefield and accelerate the renewal of weaponry and equipment, the research, development, and application of weapon systems are gradually moving towards digitization. 2 As an important form of modeling and simulation, Digital Twin has begun to be widely applied in the military field. 3 This concept was first proposed by the National Aeronautics and Space Administration (NASA) and was subsequently used throughout the entire process of complex equipment design, testing, and application.4–6 Relying on digital twin technology, the transformation of weapon equipment research and development models can be realized, upgrading from the traditional “design – experimental testing – iteration” process to a new research and development paradigm of “design – simulation analysis – iteration” 7
In the field of military equipment, with increasing uncertainty and complexity in future battlefields, weapon systems are evolving towards digitization and intelligence. 8 Digital Twin can provide comprehensive support throughout the entire life cycle of equipment, from design and manufacturing to use and maintenance.9–11 Traditionally, the construction of missile aerodynamic databases relies on extensive wind tunnel tests and Computational Fluid Dynamics (CFD) calculations. Such work is typically costly, time-consuming, and significantly impacts development schedules. 12 Faced with complex and variable external environments, researchers have gradually realized that to improve the efficiency of aerodynamic database construction, reduce R&D costs, and shorten cycles, new technological approaches must be explored. In this context, surrogate models have become a research hotspot in aircraft design due to their efficiency and flexibility. 13 In Refs. 14–16, polynomial methods were employed to fit the aerodynamic parameters of the external flow field around projectiles, and the Adams dynamic simulation platform was used to analyze the flight process of projectiles along the external ballistic trajectory. In Ref. 17, a Gaussian process regression (GPR) surrogate model was adopted to rapidly predict the aerodynamic performance schemes of typical missiles, and the effectiveness of the proposed scheme was verified through case studies. In Ref. 18, a study on aerodynamic parameter prediction for missiles based on neural networks was conducted, and a multilayer feedforward neural network optimized by the mind evolutionary algorithm was constructed. The results demonstrate that this method is feasible and effective for missile aerodynamic parameter prediction, and exhibits strong fitting capability for missile aerodynamic parameters within the parameter range defined by the samples. In Ref. 19, the application of deep learning methods to the aerodynamic shape performance prediction of flight vehicles was explored. A surrogate model between aerodynamic parameters and aerodynamic performance was established based on deep residual networks, and a comparative analysis was performed against traditional machine learning models such as random forest and double-hidden-layer neural networks. Experimental results show that the adopted deep residual network model is significantly superior to the comparative models in prediction accuracy, with more excellent fitting and generalization abilities. In Ref. 20, a rapid aerodynamic heating prediction surrogate model was constructed based on the radial basis function (RBF) neural network. After training, the model can efficiently predict the surface heat flux of flight vehicles with favorable generalization performance, and the heat flux predictions at stagnation points and windward regions are highly consistent with numerical simulation results. In Ref. 21, a method for constructing an aerodynamic discipline surrogate model based on RBF was proposed. The results indicate that this method significantly shortens the calculation cycle of aerodynamic disciplines on the premise of ensuring certain accuracy, verifying its feasibility and effectiveness. In Refs. 22–25, the physics-informed neural network (PINN) model was applied to solve various complex flow problems, including Navier–Stokes equation solving, two-phase flow analysis, data order reduction, and porous media flow modeling. In Ref. 26, an aerodynamic surrogate model based on multilayer perceptron (MLP) was constructed, which achieved high-precision and rapid prediction of aerodynamic coefficients under compressible flow conditions through hyperparameter optimization, with computational efficiency improved by nearly 800 times compared with traditional methods. Refs. 27–29 realized efficient prediction and optimal design of aerodynamic performance based on the MLP surrogate model.
Current methods have three key limitations. First, polynomial fitting cannot accurately model aerodynamic parameters in strongly nonlinear regions such as transonic, high-Mach, and large-angle-of-attack flows. Second, RBF provides good local fitting but weak global approximation, with accuracy degradation or overfitting in complex flows. Third, a single MLP learns only the global mapping and fails to capture local high-order nonlinearity, leading to non-uniform prediction errors.
To address these limitations, this paper proposes a two-stage MLP-based main–residual surrogate model. It uses a main model for global trend fitting and a residual compensation model for local error correction, balancing global approximation and local nonlinear representation. Compared with traditional single surrogate models, the proposed method can significantly reduce prediction errors and improve the stability and generalization performance of the model under complex flow conditions.
The main contributions of this paper are summarized as follows: (1) A lightweight two-stage aerodynamic surrogate modeling framework is developed for projectile exterior ballistic applications. (2) A residual learning mechanism is introduced targeting the strong nonlinear characteristics of the external flow field around projectiles, which effectively improves the prediction accuracy under high Mach number and high angle of attack conditions. (3) A data-driven method for digital twin aerodynamics is constructed based on the surrogate model and applied to the external ballistic dynamic simulation of projectiles, verifying the engineering applicability and physical consistency of the model.
The entire modeling process is shown in Figure 1. Framework diagram of the projectile exterior trajectory dynamics model based on an aerodynamic parameter surrogate model.
2. Projectile external flow field modeling and aerodynamic characteristic fitting analysis
2.1. Projectile geometric model
According to the design drawings of a specific projectile model, three-dimensional modeling software was used to construct a complete 3D model, as shown in Figure 2. During the modeling process, the structural dimensions, tolerance fits, and assembly requirements of various components were strictly followed to ensure accurate structural relationships and constraint logic. 3D model of a certain-caliber projectile.
The projectile mainly consists of the shell body and the tail weight. The shell body is the main structure of the outer casing, undertaking key functions such as flight stability, housing the fuze, and ensuring the proper function of the warhead. The weight is used to adjust the projectile’s center of mass position to meet flight mechanics stability and trajectory accuracy requirements.
The 3D model is not only used for product structure visualization but also provides support for subsequent finite element analysis of the projectile external flow field and analysis of the exterior ballistics dynamics model.
2.2. Aerodynamic simulation of projectile external flow field
Based on the 3D model of this projectile type, the finite element mesh model of the projectile and its surrounding external flow field was established, as shown in Figure 3. Finite element model of a certain projectile and its external flow field.
Based on the finite element model of the projectile external flow field, by varying the incoming flow direction and speed magnitude, the aerodynamic forces and moments at the projectile’s center of mass were calculated, including drag, lift, rolling moment, and pitching moment. The Mach number M ranges were: M∈[1:0.25:3.5]; the angle of attack α ranges were: α∈[0°:1°:10°]. The basis for these values is as follows: The projectile’s initial velocity v0 is 930 m/s (corresponding to Mach number M≈2.74). During the exterior ballistic phase, velocity gradually decreases due to air resistance, meaning the projectile’s remaining velocity will not exceed the initial velocity. Simultaneously, due to the self-stabilizing effect of the pitching moment, the range of angle of attack variation is limited. Therefore, the above value ranges cover the main aerodynamic state ranges during the projectile’s exterior ballistic phase.
To obtain high-precision aerodynamic data and support subsequent surrogate model training and projectile exterior ballistic dynamic analysis, this paper establishes a projectile aerodynamic database for exterior ballistics using computational fluid dynamics (CFD). The specific numerical methods are as follows. (1) Governing Equations and Turbulence Model
The flow field solution is based on the three-dimensional compressible Navier–Stokes equations, closed by the Reynolds-Averaged Navier–Stokes (RANS) approach. Considering shock wave structures and near-wall flow characteristics in supersonic flows, the SST (k-ω) turbulence model is adopted to describe turbulent effects. This model provides high accuracy in boundary layer prediction and separated flow simulation, making it suitable for projectile external flow problems. The air medium is assumed to be an ideal gas following the ideal gas equation of state, with thermophysical properties under standard atmospheric conditions. (2) Solver and Numerical Discretization Scheme
Steady-state calculations are performed using a density-based solver. For spatial discretization, the second-order upwind scheme is employed to improve accuracy and reduce numerical dissipation. Pressure-velocity coupling is implemented using a standard algorithm to ensure solution stability and convergence. (3) Computational Domain and Boundary Conditions
An extended structured external flow domain is used, with a size of 15 times the characteristic length of the projectile to minimize far-field boundary interference. Boundary conditions are defined as follows:
Projectile surface: Wall boundary condition, with specified rotational axis and rotational speed.
Far-field boundary: Pressure far-field, with inflow parameters set according to different Mach numbers M and angles of attack α.
This setup accurately reproduces the realistic aerodynamic environment of the projectile during supersonic flight Table 1. (4) CFD Convergence Criteria Residual monitoring criterion.

Strict convergence criteria are imposed to ensure reliable and stable numerical results. Residuals of the continuity equation, momentum equations, energy equation, and turbulence transport equations are monitored, with all residuals required to drop below specified thresholds, as listed in the table below Figures 4–6. Residual–iteration curve. Drag–iteration curves under different mesh sizes at M = 2 and α = 2°. Drag–iteration curves under different mesh sizes at M = 1 and α = 7°.


Based on the aforementioned residual-based convergence criteria, the finite element model of the projectile external flow field is simulated. The residual-versus-iteration curves of the governing equations under a given Mach number and angle of attack are shown below. (5) Mesh independence verification
The computational mesh adopts an unstructured tetrahedral mesh, with a total of 292,929 elements. To assess the influence of mesh resolution on the simulation results, three additional mesh models with different densities (116,937, 154,944, and 579,300 elements) are constructed for comparison.
Meanwhile, two sets of aerodynamic parameters under different randomly selected Mach number and angle of attack conditions are chosen as evaluation metrics. The projectile drag results are shown in the figure below:
Changes in areodynamic parameters with Different Mesh Numbers.

Results show that all aerodynamic parameters vary by less than 2.59% when the mesh count increases from 154,944 to 292,929 and 579,300. In particular, the errors between the medium mesh (292,929) and the fine mesh (579,300) are all below 1.1%. Therefore, it can be concluded that the numerical results have basically met the mesh independence requirement when the mesh number reaches the order of 3×105.
Mesh independence verification demonstrates that the CFD results possess favorable numerical stability and accuracy, providing a reliable data foundation for the subsequent construction of the aerodynamic database, and thus guaranteeing the training and physical credibility analysis of the surrogate model. (6) Establishment of the CFD Dataset
Based on the established grid model and turbulence model settings, systematic numerical simulations are conducted for various combinations of Mach number M and angle of attack α, and a complete aerodynamic parameter database is obtained. The distribution of aerodynamic parameters in the M–α plane is shown in Figure 7. Variation characteristics of projectile aerodynamic parameters with respect to mach number and angle of attack under selected operating conditions.
2.3. Establishment of projectile exterior ballistics aerodynamic equations
As the projectile’s trajectory during exterior ballistic flight is continuous in space, while the aerodynamic parameters y obtained through finite element simulation with respect to Mach number M and angle of attack α are discrete in space, to achieve spatial continuity of aerodynamic parameters, this paper first adopts the traditional polynomial fitting method to establish the projectile exterior ballistics aerodynamic equations. This method establishes an analytical relationship between aerodynamic parameters and flow field state variables through multi-dimensional function fitting of discrete aerodynamic data, enabling continuous prediction of aerodynamic forces and moments at any flight state.
Specifically, the aerodynamic parameter y can be expressed as a polynomial function of Mach number M and angle of attack α:

This method effectively achieves smooth approximation of aerodynamic parameters, ensuring good continuity and differentiability of exterior ballistic aerodynamic forces and moments during numerical simulation, providing mathematical support for solving subsequent dynamic equations.
Based on the above method, considering both fitting accuracy and the impact of polynomial order on model computation time, this paper performs polynomial fitting of order 3 (i.e., p=3, q=3) on the relationship between external flow field aerodynamic parameters and Mach number and angle of attack. The fitting results are shown in Figure 8. Polynomial fitting surface of aerodynamic parameters at the projectile’s center of mass.
However, polynomial fitting methods are prone to oscillation and overfitting issues in high-dimensional spaces, leading to reduced prediction accuracy in regions with high Mach numbers or large angles of attack. To overcome this problem, this paper further introduces an MLP-based aerodynamic surrogate model on top of the polynomial fit, leveraging the nonlinear mapping capability of neural networks to compensate for systematic errors in the polynomial model. This approach combines the analytical nature of polynomial models with the high-dimensional approximation characteristics of neural networks, achieving high-precision, continuous prediction of aerodynamic parameters, providing an efficient aerodynamic characteristic modeling scheme for the projectile exterior ballistics Digital Twin system.
3. Establishment of projectile external flow field aerodynamic surrogate model
To achieve rapid prediction of aerodynamic parameters while ensuring accuracy, this paper employs a multilayer perceptron (MLP) to construct an aerodynamic surrogate model for the projectile external flow field. By utilizing its nonlinear approximation capability, the model realizes a fast mapping from flow field conditions to aerodynamic responses, and a residual compensation mechanism is integrated to further improve prediction accuracy. The input–output definition, structural design, and training strategy of the model.
3.1. Model input-output definition
During the projectile’s exterior ballistic flight, its aerodynamic parameters exhibit significant nonlinear characteristics with changes in Mach number and angle of attack. To achieve rapid prediction, an aerodynamic surrogate model is established with Mach number M and angle of attack α as input variables. Let the input vector be x=[M,α]T and the output be the target aerodynamic parameter y=[Fx,Fy,Fz,Tx,Ty,Tz]. Here, Fx, Fy, Fz represent the drag in the x-direction, lift in the y-direction, and lift in the z-direction of the projectile, respectively; Tx, Ty, Tz represent the rolling moment about the x-axis, pitching moment about the y-axis, and yaw moment about the z-axis of the projectile, respectively. Based on CFD simulation results, a discrete sample set
3.2. Establishment of aerodynamic parameter prediction model
(1) Model Structure Design
The aerodynamic parameter prediction model adopts a typical feedforward three-layer network structure, including an input layer, two hidden layers, and an output layer. The input layer x contains 2 neurons, corresponding to variables M and α. Each hidden layer contains 10 neurons, The hyperbolic tangent function tanh is adopted as the activation function, which can be expressed as:
This function has smooth and differentiable properties within the (−1, 1) interval, effectively characterizing the variation patterns of aerodynamic parameters in highly nonlinear regions. The output layer y uses a linear activation function. Therefore, the mapping relationship of the primary model can be expressed as: (2) Loss Function and Optimization Method Composition of MLP neural network structural units.

To minimize the difference between the model predictions and the true aerodynamic parameters, the Mean Squared Error (MSE) is defined as the loss function:
The Levenberg–Marquardt (LM) algorithm is used for training with an initial learning rate of 0.01. It combines gradient descent and Gauss–Newton iteration for fast convergence. Its gradient formula can be expressed as: (3) Model Training and Preliminary Results

To mitigate overfitting and improve the generalization ability of the model, a validation set is introduced during the training process, and early stopping is employed as a regularization method. Training is terminated when the validation loss does not decrease for 6 consecutive epochs. In the data preprocessing stage, the input variables (Mach number M and angle of attack α) and output aerodynamic parameters are normalized to the interval [0, 1] using the min–max normalization method to enhance the stability of network training. All 121 samples are divided into training, validation, and test sets with approximate proportions of 70%, 15%, and 15%, respectively. Specifically, the training set contains 85 samples for model parameter learning, the validation set contains 18 samples for adjusting model complexity and preventing overfitting, and the test set contains 18 independent samples for evaluating the prediction performance of the model on unseen data. The random seed is fixed (seed = 39) during training to ensure the reproducibility of results. All models in this paper are implemented in the MATLAB R2024a environment and trained/optimized using the Neural Network Toolbox.
Based on the above MLP neural network structure, the primary model for predicting projectile external flow field aerodynamic parameters is established. The model prediction effects are shown in Figure 10. Comparison between predicted and original values of primary MLP aerodynamic parameters.
After iterative computation, the primary model converged to a stable state. The Root Mean Square Errors (RMSE) for the predicted results of projectile exterior ballistics aerodynamic parameters were 0.33, 2.91, 0.00163, and 0.634, respectively, indicating that the model accurately captures the overall variation trends of aerodynamic parameters with Mach number and angle of attack.
However, in regions of high Mach number and large angle of attack, limited by sparse samples and enhanced flow field nonlinearity, systematic bias still exists in the primary model. To further improve model accuracy, the next section will establish an aerodynamic parameter compensation model based on the concept of residual learning to nonlinearly correct the errors of the primary prediction.
3.3. Establishment of aerodynamic parameter compensation model
The primary model captures global trends but still shows prediction errors in complex regions such as high Mach numbers and large angles of attack. This mainly stems from uneven training sample distribution and the limited fitting capability of a single MLP model in highly nonlinear regions. To further enhance model accuracy, this paper introduces the concept of Residual Learning to establish an aerodynamic parameter compensation model for nonlinear correction of the prediction errors from the primary model. (1) Residual Definition and Learning Objective
Given the primary model prediction output as 
The objective of the compensation model is to learn the mapping relationship between input x and residual r, obtaining the residual prediction value (2) Theoretical Significance of the Residual Model

From function approximation theory, the residual network adds a high-order nonlinear correction to the primary model, improving approximation accuracy. The loss function for the primary model prediction error is known as:
Upon training convergence, it satisfies:
This condition indicates that the primary model residual is approximately orthogonal to the gradient direction of the predicted output in parameter space. Therefore, the introduction of the secondary residual network is equivalent to relearning the remaining error components in the orthogonal space, thereby avoiding redundant learning, accelerating convergence speed, and enhancing the model’s generalization ability.
In other words, the training of the residual compensation network is equivalent to performing secondary optimization in the error space, minimizing the final model prediction error:
It should be noted that the residual learning structure introduced in this paper is proposed mainly from an engineering modeling perspective, aiming to compensate for the nonlinear errors that the main model fails to fully capture. This process can be intuitively interpreted from the viewpoint of function approximation, but does not involve strict high-order expansion or theoretical proof of convergence. Its effectiveness is mainly verified by the subsequent numerical experimental results. (3) Compensation Network Training and Model Fusion
Based on the above aerodynamic parameter compensation model neural network structure, the fusion of the primary model and the secondary residual model is performed, ultimately establishing the projectile exterior ballistics aerodynamic parameter surrogate model. The model prediction effects are shown in Figure 11. Comparison of predicted and CFD results of aerodynamic parameters surrogate model.
Comparative experiments show that the compensation model significantly reduces systematic bias in high Mach number and large angle of attack regions, reducing the overall Root Mean Square Error (RMSE) from the primary model’s respective values of 0.33, 2.91, 0.00163, and 0.634 to 0.22, 0.87, 0.00109, and 0.086. This demonstrates the significant effectiveness of the residual compensation mechanism in improving model accuracy and stability. (4) Validation of Model Generalization Ability
To verify the prediction performance of the model on unseen data, evaluation is carried out based on the above 18 test set samples that are completely uninvolved in the training and validation stages. The test results of the aerodynamic parameter compensation model are shown in Figure 12. Validation of the generalization performance of the aerodynamic parameter surrogate model.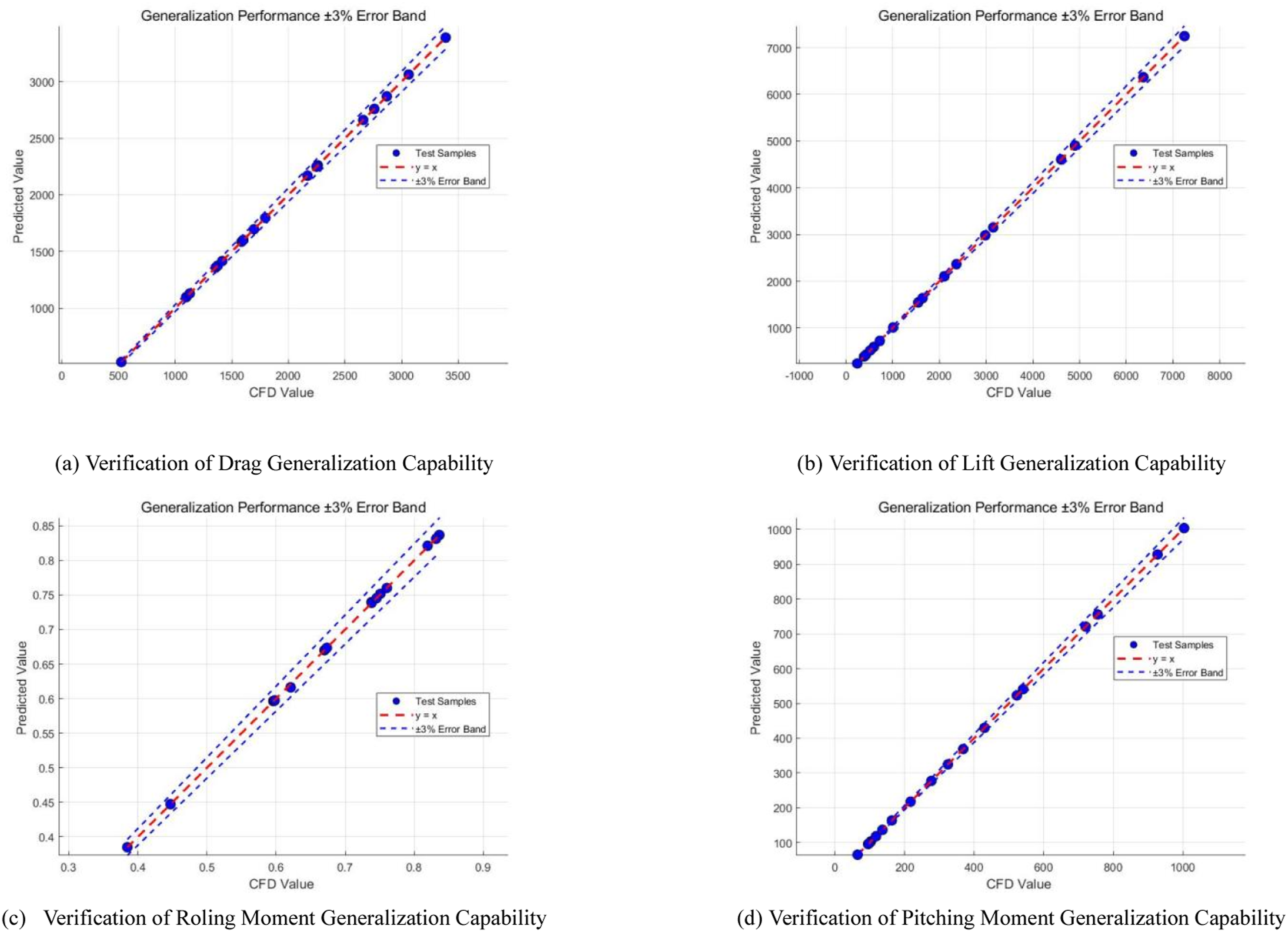
The predicted results of the test samples and the CFD values are distributed approximately along the y = x line, with most data points lying within the ±3% error band, indicating good agreement between the model predictions and the reference values for unseen samples. Meanwhile, the relative errors of all test samples remain small without significant abnormal deviations, demonstrating that the model can achieve stable interpolation prediction within the coverage of the training samples.
3.4. Model complexity and Computational Cost analysis
To evaluate the computational efficiency and embeddability of the established aerodynamic parameter prediction and compensation surrogate model, this section analyzes the model from three aspects: network parameter quantity, computational complexity, and runtime, comparing it with traditional CFD numerical calculations. (1) Network Parameter Scale Analysis
Assuming the multi-layer perceptron network has L layers, where the l-th layer contains nl neurons, the total number of parameters in the network is the sum of weights and biases across all layers:
For the primary model—input layer contains 2 nodes, two hidden layers each contain 10 nodes, output layer contains 6 nodes—we have: P = (2×10+10) + (10×10+10) + (10×6+6) = 206. Therefore, a single model contains only 206 trainable parameters, making the network structure lightweight and facilitating subsequent embedding into the exterior ballistics simulation system for real-time invocation. The aerodynamic parameter compensation model has the same structure as the primary model, with P = 206 as well. Compared to deep networks or high-dimensional interpolation algorithms, the model scale is only a fraction (e.g., a few hundredths), ensuring computational efficiency and interpretability. (2) Time Complexity Analysis
The main cost of the MLP network during the forward computation phase comes from matrix multiplication and activation function calculations. Assuming the computational complexity of a single layer is approximately O(nlnl+1) the overall forward propagation complexity is:
Substituting the network structure from this paper:
This means each prediction requires only around a few hundred multiplication-addition operations and can be completed within milliseconds. In contrast, CFD solving a single operating point typically requires 103∼104 iterations, with each iteration involving updates for approximately 106 grid nodes, and computation time is usually on the order of minutes or even hours. Therefore, the surrogate model improves time efficiency by approximately 105∼106 times compared to CFD. (3) Training Complexity and Computational Cost
The training phase includes both forward propagation and backpropagation. Its time complexity can be expressed as:
The above structural design and training strategy lay a foundation for high-precision nonlinear aerodynamic mapping. To further verify whether the proposed modeling framework can deliver quantifiable predictive advantages, a comparative quantitative validation is carried out in the next section.
4. Model validation and comparative analysis
(1) Comparison of Prediction Performance Among Different Aerodynamic Surrogate Models
To verify the effectiveness and superiority of the established aerodynamic parameter prediction model, this chapter compares and analyzes the prediction performance of four distinct modeling methods based on identical projectile external flow field simulation data: the polynomial fitting model, the RBF-based aerodynamic parameter surrogate model, the MLP-based main model, and the main-residual two-stage model based on residual learning. The prediction accuracy and stability of each model in different Mach number and angle of attack regions are evaluated through quantitative error metrics and visual analysis.
To ensure fairness in model comparison, the inputs and outputs of all 4 methods are kept consistent. Meanwhile, to illustrate the accuracy differences among the different models in predicting projectile aerodynamic parameters, this paper analyzes the spatial distribution errors of the drag, lift, and moments output by each model. Specifically, the prediction results are compared with the baseline data obtained from CFD simulations to examine the error distribution characteristics of the models across the Mach number M and angle of attack α space. By plotting error contour maps, the prediction deviations and regularities of different models at various flight states can be visualized, providing a basis for further model optimization. The residual spatial distributions for the 4 models are shown in Figures 13–16. Spatial distribution of drag prediction error. Spatial distribution of lift prediction error. Spatial distribution of rolling moment prediction error. Spatial distribution of pitching moment prediction error.



From a physical viewpoint, the prediction errors exhibit a non-uniform distribution across the flow field. Particularly in regions involving high Mach numbers, large angles of attack, and transonic flow, strongly nonlinear physical phenomena—such as shock wave formation/interaction, boundary layer separation, and flow instability—become increasingly prominent. These effects significantly escalate the complexity of the nonlinear mapping between flow conditions and aerodynamic responses.
Consequently, conventional methods, including polynomial fitting, RBF models, and single-stage MLPs, struggle to fully capture these complex local nonlinearities, resulting in substantial prediction deviations. In contrast, the residual learning model addresses this challenge effectively. By learning the residual errors of the primary model, it precisely characterizes localized nonlinear features. This mechanism substantially enhances prediction accuracy, particularly in high-complexity flow regimes.
To evaluate model performance, the following four common metrics are adopted to evaluate model performance:



Comparison of predictive performance for projectile drag across different models.

Comparison of predictive performance for projectile lift across different models.

Comparison of predictive performance for projectile rolling moment across different models.

Comparison of predictive performance for projectile pitching moment across different models.

Based on the results in Tables 3–6, all surrogate models exhibit dramatically superior predictive performance compared with the conventional polynomial fitting method, achieving remarkable reductions in RMSE, MAE, and MAPE across all aerodynamic coefficients. Notably, both the RBF model and MLP primary model achieve comparable high accuracy and already represent a substantial improvement over polynomial fitting, owing to their strong nonlinear approximation capabilities. Among all configurations, the proposed aerodynamic parameter compensation model delivers the optimal overall performance, with consistent and further error reduction across all prediction tasks.
Taking drag as an example, the RMSE decreases dramatically from 30.2811 for the polynomial model to 0.3383 for the RBF model, and further to 0.3327 for the MLP primary model. With aerodynamic parameter compensation, the RMSE is further reduced to 0.2223, achieving an additional reduction of approximately 33.18% compared to the primary model. The MAE and MAPE are reduced by 15.93% and 7.14%, respectively, indicating that the compensation model effectively improves local prediction accuracy.
For lift prediction, the RMSE is reduced from 31.7302 (polynomial) to 2.967 (RBF) and further to 2.905 for the MLP model, while the aerodynamic parameter compensation model significantly lowers it to 0.8701. The RMSE is reduced by 70.05% compared with the MLP primary model, and by 97.26% compared with the polynomial model. The corresponding MAPE decreases from 24.5756% to 0.315%, with a reduction rate of 98.72%, indicating a substantial improvement in prediction stability under complex flow conditions.
For rolling moment, although the overall magnitude is relatively small, all models exhibit stable and consistent improvements. The RMSE decreases from 0.0080 (polynomial) to 0.0027 (RBF), then to 0.0017 (MLP), and finally to 0.0011 (compensation model). Compared with the MLP primary model, the RMSE of the compensation model is reduced by 35.29%, and by 86.25% compared with the polynomial model, demonstrating that the proposed method maintains high-resolution predictive capability even for low-magnitude aerodynamic responses.
For pitching moment, the RMSE decreases significantly from 3.7142 (polynomial) to 0.1293 (RBF) and 0.6340 (MLP), and is further reduced to 0.0858 after aerodynamic parameter compensation. The RMSE is reduced by 86.47% compared with the MLP primary model, and by 97.69% compared with the polynomial model. The corresponding MAPE decreases from 9.2931% to 0.0728%, with a reduction rate of 99.22%, indicating that the compensation model provides robust and high-precision predictions for strongly nonlinear aerodynamic moments.
Overall, the MLP primary model is capable of capturing the global nonlinear mapping of aerodynamic parameters, while the aerodynamic parameter compensation model further refines local prediction errors by learning the remaining nonlinear features. This two-stage structure enables more accurate and stable predictions across the entire flow field, providing reliable aerodynamic data support for real-time exterior ballistics simulation. (2) Model Uncertainty Analysis
To quantify the uncertainty of the aerodynamic surrogate model, 10 independent repeated trainings are performed for each aerodynamic parameter under multiple different random seeds. The fluctuation range and statistical characteristics (mean, standard deviation, and coefficient of variation) of the root-mean-square error (RMSE) obtained from multiple trials are used as quantitative indicators of model uncertainty.
In each trial, training, validation, and test sets are randomly re-split to ensure statistical independence. Therefore, this repeated training procedure also constitutes a repeated random resampling validation mechanism, providing further evidence for the robustness and generalization stability of the proposed model.
Error statistics of aerodynamic surrogate model over 10 repeated trainings.

The results show that according to the statistical results of 10 repeated trainings in the table.
The drag RMSE has a mean of 0.2164, standard deviation of 0.0172, coefficient of variation of 7.95%, with minimum and maximum values of 0.1947 and 0.2456, respectively. The lift RMSE has a mean of 0.8880, standard deviation of 0.0635, coefficient of variation of 7.15%, ranging from 0.7789 to 0.9700. The rolling moment RMSE has a mean of 0.00112, standard deviation of 8.1×10-5, coefficient of variation of 7.23%, with a narrow overall range (0.00103–0.00128). The pitching moment RMSE has a mean of 0.0856, standard deviation of 0.0058, coefficient of variation of 6.78%, ranging from 0.0771 to 0.0957.
Further analysis reveals that the coefficients of variation of RMSE for all aerodynamic parameters are less than 10%, and the standard deviations are relatively small compared with the corresponding means, indicating low dispersion and good consistency among multiple repeated training results. This demonstrates that the randomness introduced by network initialization and data partitioning has limited influence on prediction accuracy, and the model training process exhibits satisfactory stability.
In summary, the constructed aerodynamic surrogate model achieves stable prediction performance under multiple random initializations, with strong reproducibility and robustness. Its prediction accuracy is reliable and can meet the requirements of high-precision aerodynamic modeling and engineering applications.
In addition, it should be noted that this study mainly analyzes the model uncertainty caused by random initialization and data partitioning. Other sources of uncertainty, such as data noise and model structure selection, will be further investigated in future work. (3) Small-Sample Sensitivity Analysis
RMSE comparison of aerodynamic parameter compensation model with different sample sizes.

The results show that as the grid size increases from 9×9 to 11×11, the RMSE of each aerodynamic parameter gradually decreases and tends to converge stably. When the grid reaches 11×11 (121 samples), the RMSE remains nearly unchanged, indicating that this sample size can sufficiently cover the nonlinear variation range of projectile aerodynamic parameters and meet the convergence requirements for surrogate model training and prediction.
It should be noted that although the 121 samples used in this paper are relatively small in number, the model is a lightweight MLP network with only two input dimensions (Mach number and angle of attack), which has a small parameter scale and low sample demand. Meanwhile, the 11×11 uniform grid fully covers the actual flight envelope of the projectile, with uniform sampling distribution and no sparse regions, which can adequately characterize the variation law of aerodynamic parameters.
In summary, under the conditions of low-dimensional input, lightweight network, and uniform sampling, 121 samples are sufficient and reasonable, ensuring the prediction accuracy and generalization ability of the model. In addition, the present study focuses on low-dimensional aerodynamic parameter mapping rather than high-dimensional flow-field reconstruction, which substantially reduces the complexity of the learning task and the corresponding sample demand.
5. Coupling research on exterior ballistics dynamics based on projectile aerodynamic parameter surrogate model
To verify the effectiveness and physical consistency of the aerodynamic parameter surrogate model during the projectile exterior ballistic flight phase, this section establishes a projectile exterior ballistics dynamics model based on the 6-degree-of-freedom aerodynamic forces and moments output by the surrogate model. The position, velocity, and attitude information output by the dynamics model are used to assess the surrogate model’s ability to characterize projectile flight characteristics and its numerical stability.
A combined ADAMS–Simulink simulation platform is employed to establish the projectile exterior ballistics dynamics model. ADAMS provides a complete rigid body dynamics modeling and simulation environment for solving the projectile’s equations of motion and visualization. Simulink serves as the numerical computation platform for the aerodynamic surrogate model, responsible for real-time calculation and feedback of aerodynamic forces and moments. The combined application of the two provides a more comprehensive dynamic simulation and analytical environment for the projectile exterior ballistic process. The projectile exterior ballistics dynamics simulation model is shown in Figure 17. Projectile exterior ballistics dynamics simulation model.
The inputs to the dynamics model are the six components of the aerodynamic parameter surrogate model in the projectile axis coordinate system: the total drag component in the x-direction Fx, the y-direction component Fy, the z-direction component Fz; and the total moment components about the x-axis Tx, y-axis Ty, and z-axis Tz. The outputs are the projectile’s position information, including: range Dx, altitude Dy, lateral deviation Dz; velocity information: the projectile’s total speed magnitude relative to the ground VM(scalar magnitude expressed as Mach number M), spin rate ω; and attitude information: angle of attack about the y-axis αy, angle of attack about the z-axis αz.
As shown in Figure 17(b), the output signals from the dynamics model, VM, αy, and αz, are combined to form two sets of input quantities: [VM,αy]and [VM,αz]. These are fed into the aerodynamic parameter surrogate model. The surrogate model calculates the projectile’s position and attitude information based on the Mach number and angle of attack, enabling real-time updating and feedback of the aerodynamic response. This approach establishes a closed-loop structure for exterior ballistics simulation, creating bidirectional coupling between the surrogate model and the dynamic system.
The initial velocity v0and initial elevation angle θ0 of the projectile dynamic model are set according to the parameters provided by the range as follows:v0=930m/s、θ0=30°;v0=930m/s、θ0=50°;v0=335m/s、θ0=50°。Based on the above boundary conditions, the projectile exterior ballistic dynamic model is solved, and the dynamic responses of the projectile are shown in Figures 18–20. Simulation results of trajectory parameters at an initial velocity of 930 m/s and a firing angle of 30°. Simulation results of trajectory parameters at an initial velocity of 930 m/s and a firing angle of 50°. Simulation results of trajectory parameters at an initial velocity of 335 m/s and a firing angle of 50°.


Comparison between projectile exterior ballistic dynamic simulation results and firing table data. 30

As shown in Table 9, the relative deviations between the simulation results obtained from the aerodynamic surrogate model and the ADAMS dynamic model, and the firing table data are all controlled within 6%, indicating that the established model achieves high consistency and reliability in predicting macroscopic ballistic parameters. This demonstrates that the surrogate model can provide credible aerodynamic input for the dynamic response analysis of fuze during exterior ballistics, and meets the dual requirements of computational accuracy and efficiency in real-time prediction scenarios. Therefore, the proposed model is not only an effective numerical approximation tool, but also verifies its engineering application potential in a digital twin-driven exterior ballistic prediction system.
6. Conclusion
(1) This study developed an MLP-based primary-residual dual-stage surrogate model for accurate and efficient aerodynamic parameter prediction in projectile external flow fields. The global aerodynamic mapping is first established by the primary model using Mach number and angle of attack as inputs. A residual learning mechanism is then adopted to construct a compensation model, which effectively corrects nonlinear biases in high-Mach and large-angle-of-attack regions. (2) Quantitative validations show that the proposed model achieves higher prediction accuracy than polynomial fitting, RBF models, and the single-stage MLP. The RMSE values of multiple aerodynamic parameters are reduced by approximately 50% on average. Uncertainty analysis and small-sample sensitivity tests confirm the stability and reliability of the proposed method. (3) By coupling the surrogate model with the exterior ballistics dynamics system, the simulated trajectory parameters agree well with firing table data, verifying the physical consistency and engineering applicability of the model. The proposed approach provides a high-precision, low-cost alternative to conventional CFD-based aerodynamic prediction and supports digital twin modeling for projectile exterior ballistics.
It should be noted that the present study mainly focuses on the development of an MLP-based aerodynamic surrogate framework under small-sample CFD conditions. Therefore, the comparative analysis is limited to representative lightweight surrogate approaches, including polynomial fitting, RBF, and MLP-based models. More advanced surrogate architectures, such as PINNs, transformer-based models, and operator-learning frameworks, are not considered in this study due to their higher data and computational requirements. Future work will further investigate these approaches, incorporate wind-tunnel and free-flight experimental data, and extend the proposed framework to more complex flow conditions.
Footnotes
Ethical considerations
This study is a theoretical and numerical simulation research on aerodynamic parameter prediction of projectile external flow fields, which did not involve human subjects, animals, or other materials requiring ethical clearance. Therefore, no ethical approval or informed consent was needed. All research activities were conducted in line with academic ethics and publishing norms.
Author contributions
Conceptualization, Siyu Xin. and Yongping Hao.; methodology, Siyu Xin. and Yongping Hao.; software, Siyu Xin. ; validation, Jiayi Zhang.; formal analysis, Siyu Xin.; resources, Jiayi Zhang.; data curation, Siyu Xin.; writing—original draft preparation, Siyu Xin.; writing—review and editing, Siyu Xin. and Yongping Hao; visualization, Siyu Xin.; supervision, Yongping Hao and JIayi Zhang. All authors have read and agreed to the published version of the manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
All data generated or analyzed in this study are contained within the published article. Further inquiries about the data may be addressed to the corresponding author.