
Abstract
The bending moduli of solid and hollow glass fibers were determined by means of fiber deflection tests. The test method was modified by measuring both the vertical and horizontal displacements of the end of the deflected fiber, without increasing the number of tested fibers, in order to reduce the high scatter of conventional test results obtained by measuring only the vertical displacement. Upper and lower boundary curves of the fiber end displacements were determined to filter out inaccurate measurements, for example, when the neutral line of the fiber is not a plane but a spatial curve. The mean and coefficient of variation of the fiber bending modulus were estimated from the recorded coordinates of the fiber ends, applying two newly-developed statistical evaluation methods based on the individual coordinates or on their average. After comparing several evaluation methods, it was demonstrated that the individual coordinate-based method provided the least relative error of the average.
Increasing emphasis has recently been put on energy saving—for example, while traveling, transporting goods, or simply moving objects to save resources and reduce emissions. 1 Polymer matrix composite materials are suitable for energy efficient structures due to their high stiffness and strength combined with low density, and their spread has been steady in the recent decades. 2 Thermoset polymer composites typically consist of two constituents: fibers (e.g. glass, carbon, aramid) and matrix (e.g. epoxy, unsaturated polyester, and other resins, including bio-based ones). 3 The performance of composites can be improved either with advanced matrix materials including hybrid resins, 4 or with novel fiber types. Most of the mechanical properties of well-designed composites are dominated by the fiber properties, which therefore need to be determined accurately. Novel carbon nanotube-based fiber materials, 5 fiber forming techniques such as electrospinning,6–8 and special cross sections, including hollow fibers, are in focus for researchers to improve composite performance and to add various extra functions to the materials.
Hucker et al.
9
used hollow glass fibers (HGF) to improve the compression strength of composite plates. The hollow fibers have higher bending stiffness than solid ones of the same linear density, which may be exploited, similarly to the high area moment of inertia of sandwich structures. Hucker et al. fabricated HGFs with various diameters, and characterized them with the fiber hollow fraction K2, defined as the ratio of the inner (di) and outer (do) diameter of the fibers, as in equation (1)

Various uni-directional (UD) composite specimens were tested in compression and it was highlighted that the elastic modulus of the composite decreased if the hollow fraction of the fibers was increased. A 10% increase in compressive strength was achieved with K2 ≈ 0.22. If the elastic modulus of the fibers had been measured—for example, by fiber deflection tests—the compressive response of the plates could have been estimated and analyzed. Boniface et al. 10 reported that composite plates made of hollow fibers had beneficial energy absorption properties. Hucker et al. 11 fabricated their hollow fibers from glass tubes. The pre-form was heated up and stretched to low diameter hollow fibers, which were tensile tested. Low fiber wall thickness and high stretching improved the modulus and strength of the fibers.
Rosen et al. 12 investigated solid and hollow glass fibers and their composites, and highlighted that the hollow glass fiber reinforced plastics (HGFRP) have better stiffness and compressive strength than those reinforced by solid fibers.
Bayat and Aghdam 13 highlighted through finite element (FE) analysis that hollow fibers had better cooling conditions during manufacture than solid ones, and therefore the detrimental residual stress in the fiber due to fast cooling was reduced. Another FE study indicated that the energy absorbing capacity of the composites can be increased with increased fiber hollow fractions. Besides their beneficial mechanical properties, hollow fibers can store healing or damage-indicating fluids, 14 as an alternative to microcapsules. 15
The mechanical properties of fibers—for example, for composite reinforcement—play a key role in most applications, so fiber testing is crucial. Ameriacan Society for Testing and Materials (ASTM) standards D1388 and D5732 (discontinued in 2008) propose bending stiffness measurement methods for textile samples by means of cantilever bending (Option A of ASTM D1388 and ASTM D5732) and loop bending (Option B of ASTM D1388). Although these standard test methods apply to textile strips, their principles are applicable to single fibers as well. The flexibility of single fibers can be measured by bending the fiber into a loop, where the smallest radius of curvature is measured before fracture of the fiber. A significant difficulty of this test method is the measurement of the curvature just before fracture,
16
which may be done by post-processing a recorded video of the test. Another method utilizes a cone to measure the curvature of the fiber loop at break. Tows of fibers are tensile tested in the textile industry with a knot to explore their flexibility. This test can be done on individual fibers as well. There is also a fiber test where two linked U-shaped loops are bonded to paper tabs and pulled until fracture. The bending modulus of individual fibers can be determined from their deflection due to their own weight, with a test similar to the cantilever test (Option A of ASTM D1388 and ISO 4604:2011), as shown on Figure 1. A fiber clamped horizontally at one end exhibits a deformed shape due to its own weight, and the vertical displacement (fB = −yB) of the other end can be recorded using a scale.17,18 The test methods based on deflection due to own weight can be divided into two categories: (a) where the vertical displacement of the end of a given length (l0) fiber is recorded; or (b) where the specimen length corresponding to a given chord angle (β) is recorded. Figure 1 shows the schematic of the fiber deflection test. Method (a) has various evaluation processes, while method (b), which is suitable for testing fabrics, cloths, and films, as well as fibers,19,20 is usually executed using a Flexometer (ASTM D1388, D5732 and ISO 4604:2011). The horizontal displacement of the fiber end (ΔxB = l0–xB) has not been used for evaluation of the deflection tests so far in the literature, although it could improve the accuracy of the results.
Geometrical schematic of the fiber deflection test (fB = –yB and ΔxB, respectively are the vertical and horizontal displacements of the fiber end, B0 is the end-point of the straight fibre before deflection).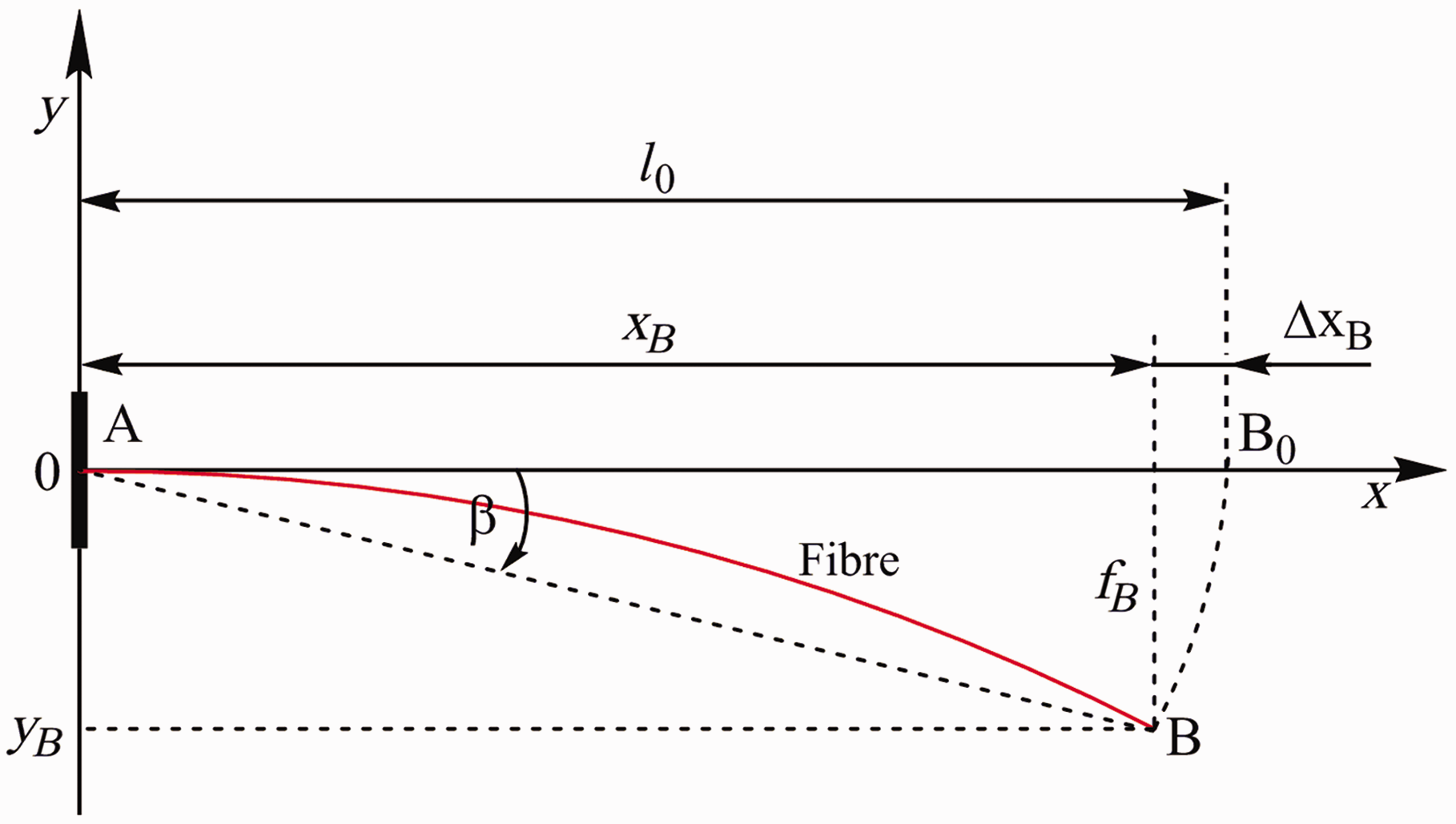
The aim of this paper is to improve the accuracy of the fiber deflection test method by better exploitation of the test data, without increasing the number of samples. The improved evaluation of the test method can result in reduced variability and better bending property estimation of the composites made from the tested fibers.
Materials and methods
The applied hollow fibers were supplied by R&G Faserverbundwerkstoffe GmbH (Germany) in the form of 216 g/m2 areal mass woven fabric of twill weave. The solid fibers were manufactured by 3B (Belgium), in the form of continuous tows. The compositions of the two glass fiber types are similar, according to inductively coupled plasma optical emission spectrometry investigations. Fiber types of similar outer diameters were selected for the experiments.
Before the deflection test the geometrical properties, such as outer and inner diameters, were measured on each individual fiber, optically. The measured diameter data (mean and standard deviation) for hollow fibers were douter = 13.41 ± 1.32 µm and dinner = 6.10 ± 1.21 µm (K2 = 0.21) while the data for solid fibers was d = 13.77 ± 0.73 µm. Fiber deflection tests were performed earlier on solid and hollow glass fibers of 50 mm length, and evaluated using only the vertical displacements of the fiber ends. Results of these tests have been reported earlier.18,21,23 The essence of this method is that a fiber is clamped horizontally at one end (Figure 1) and a vertical measuring scale is used to read the vertical displacement (fB = −yB) of the free fiber end, with 0.5 mm precision. More accurate results can be obtained if the horizontal displacement (ΔxB) of the fiber end is measured by another scale as well. In order to demonstrate the applicability of this latter evaluation method, further deflection tests were performed on 10 solid and 10 hollow glass fibers.
Results and discussion
Previous results of vertical deflection measurements

The deflection tests of hollow fibers provided significantly higher values of mean modulus and coefficient of variation than those of the solid fibers. Some of the possible reasons for deviations and high scatter are inaccuracies of the measurement method, in diameter measurements, or in recording only the vertical displacements of the fibers. Another reason for the high scatter and the deviation in the mean values is the possible eccentricity of the hollow fibers, which can result in the neutral axis of a deflected fiber not forming a plane curve, as is assumed for the evaluation. The out-of-test-plane distance of the end point of such an eccentric fiber can reduce its apparent vertical displacement, and consequently increase the apparent elastic modulus calculated from the measurements. In order to eliminate the above mentioned problems, both the fiber deflection test method and the evaluation process were improved to enable more accurate determination of the fiber modulus, based on the classical bending theory and measured values of both the vertical and horizontal displacements of the fiber end.
Calculation of large fiber deflections
The following conditions were assumed: the fiber is flexible (i.e. has a finite bending stiffness), has a circular cross section, the fiber diameter, d, is constant and small, the elongation of the fiber is negligible compared to its bending deflection, and the effect of shear force is negligible. The material of the fiber is linearly elastic, and the equations of classic bending theory can be applied (e.g. the deflected shape of the fiber is a plane curve and its cross sections remain planar).
The deflection of the fiber due to its own weight increases if the free length of the fiber is increased, but the change in fiber length due to deflection is negligible. Therefore the arc length between two points of the deformed shape, Δs, always equals the original distance, Δx0, of the same points. According to the above assumptions, s = x0 during the calculation of bending moment along the fiber. Parameters of the deflected fiber shape and the schematic of the forces acting on the arc element are summarized in Figure 2.
Schematic of the forces acting on an arc element of the deflected fiber (yB = y(l0)).
It is most practical to describe the fixed length deflected shape of the fiber along its length as a function of the arc length (distance along the fiber), s, and the angle, ϕ, of the tangent at any point, where x(s) and y(s) are the coordinates of a given point and w (N/mm) is the distributed load that is the specific fiber weight. The moment, M(s), on an arc element can be estimated with lower and upper bounds according to equation (2) based on inequality (3)
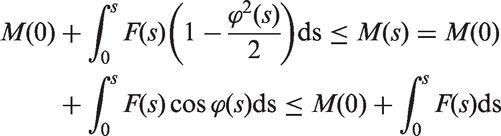

According to the basic assumptions detailed earlier, the classic bending theory is applied as in equation (4)


The second order non-linear differential equation (5) cannot be solved analytically, therefore upper and lower bounds are determined first using inequality (2), and then numerical methods are applied for a more accurate solution.
Boundary curves of the fiber end positions
The upper bound of 
Therefore the differential inequality can be written as in equation (7)

Integration of equation (7) yields:

Integration constant, C1, can be determined if we consider that the curvature is zero at the free end of the fiber at s = l0, as given in equation (9)

Equation (8) gives a negative curvature for the deflected fiber shape if C1 is substituted according to equation (10), which agrees with Figures 2 and 3
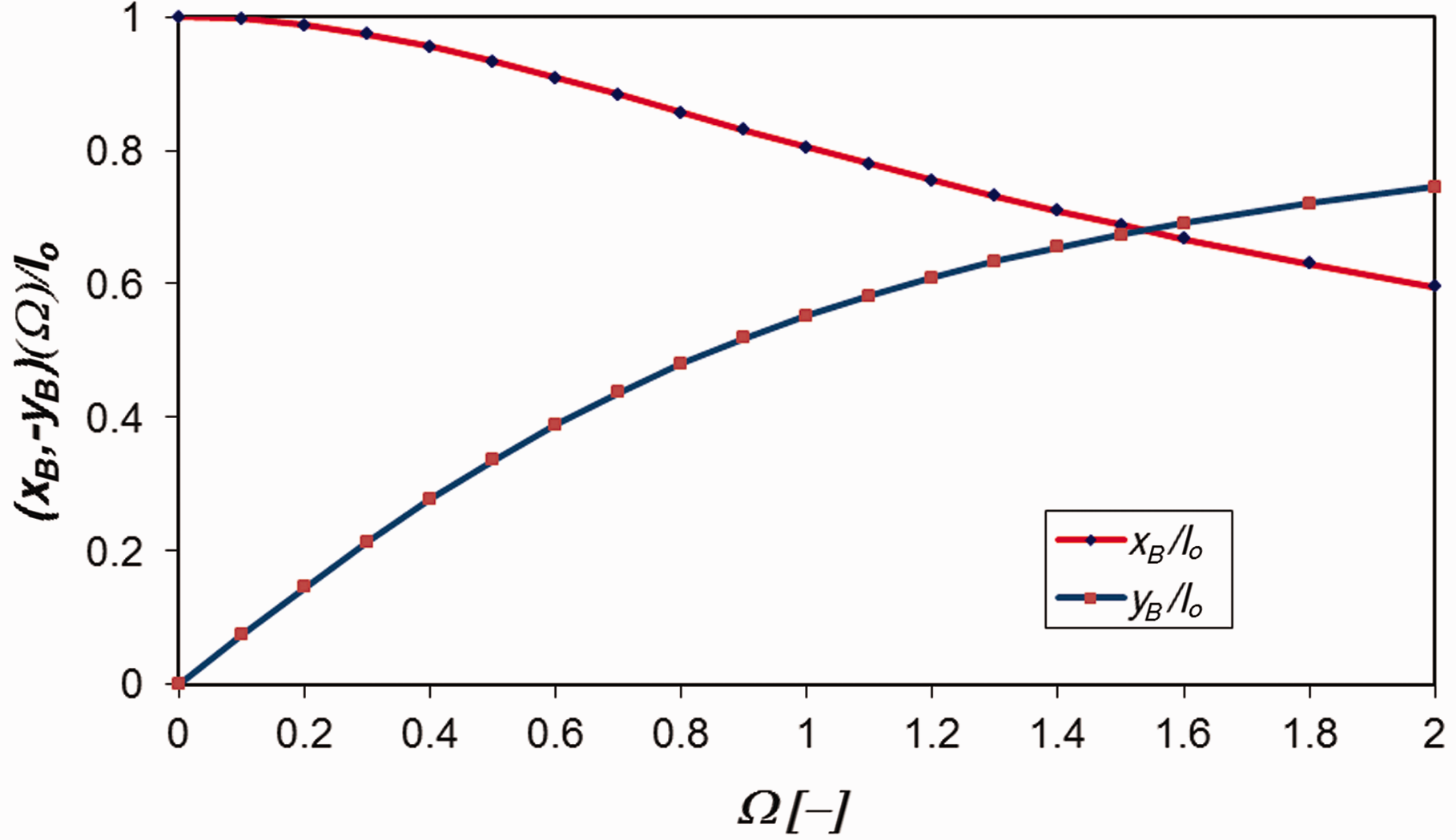
Normalized coordinates of the fiber end as a function of parameter Ω.
Equation (10) indicates that the essence of the upper boundary estimation is that x0 = s is also considered when calculating the moments. Moments higher than the actual ones are used, therefore, which results in over-estimated absolute curvature values. In the case of cosϕ = 1 the expression of the elementary lever-arm in equation (2) changes from cosϕds into ds, and this simplification results in a kind of uniformly distributed force system, where the forces acting on the arc elements point to the direction of the centre of curvature instead of being vertical.
Equation (10) can be integrated, considering ϕ(0) = 0, to obtain the tangent angle of the estimated fiber shape. The arranged form of equation (11) shows that the angle of the tangent is always negative along the fiber (0 ≤ s ≤ l0), which agrees with Figure 2

The fiber length dependent Ω constant is one sixth of Holden’s k constant. The parametric equations of the fiber shape with 0 ≤ t = s/l0 ≤ 1 can be calculated using ϕ(s), as given in equation (12).

The lower boundary curve of the fiber deflection can be generated, if the curvature of the fiber is assumed to be zero all along its length—that is, the fiber remains straight and the fiber is rotated around the fixed end, which is transformed into a hinge. Consequently, the curve of fiber end-point is a circular arc, described by equation (13)

All the experimental data points of the solid fibers fall between the boundary curves, but four of those of the hollow fibers (including two overlapping ones) falls outside the boundary for maximum curvature, probably due to measuring artifacts (see Figure 4). These are excluded, with the aid of the boundary curves, to increase the accuracy of the remaining data points. A significant scatter is identified in the test data, therefore an accurate solution between the boundary curves is yet to be found for the correct determination of the average elastic modulus of the fibers.
Exact solution using the fourth-order Runge–Kutta method
The so-called fourth-order Runge–Kutta method 24 is an effective numerical tool for solving ordinary differential equations. It provides explicit solutions applying recursive formulae for calculating the next value of the ordinate from the weighted sum of four former ones and a finite abscissa increase. It is primarily used for first order differential equations and initial value problems, but it can be applied successfully to solve boundary value problems of higher order equations by using the so-called shooting method, based on iterations. 24 As the fourth-order Runge–Kutta method provides fourth-order accuracy (fifth-order error) the same fifth-order error definition was applied in calculations performed with Microsoft Excel. The normalized arc length interval of [0,1] was divided into 100 equal sections, and the calculations were executed with a step size of Δt = 0.01. Figure 3 shows the calculated coordinates of the fiber end-point as a function of parameter, Ω. These curves correspond to those calculated by Holden. 22
New evaluation method and test results
The curves of Figure 3 can be considered as parameterized inverse functions from the test evaluation point of view, since the measured values are the (ΔxB = l0–xB, fB = −yB) displacement components of the fiber end-point, and Ω is the parameter to be determined. The polynomial trends of the normally-measured y and the previously-not-exploited x normalized coordinates of the fiber end-point were used to determine the Ω parameter explicitly, with high coefficient of determination (
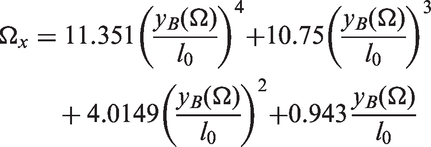
In the case of a Flexometer, the l0 fiber length belonging to a given β angle of the fiber chord (Figure 1) is measured, and the parameter, Ω, containing l0, according to equation (11), can be estimated with a second order polynomial as a function of tanβ = −yB/xB with a good agreement (R2 ≈ 1), as follows.

Figure 4 shows the measured coordinates of the fiber end-point and the boundary curves according to equations (12) and (13), as well as the fiber-end curve, determined with the fourth-order Runge–Kutta method, which runs in the middle of the area between the boundary curves.
Measured coordinates of fiber end-points, boundary curves, and the fiber-end curve determined with the Runge–Kutta method.
The end-point curve generated by using the Runge–Kutta method, can be described with a simple second order polynomial with excellent fit (R2 = 0.9999), where the independent variable is a square root type expression given by

Figure 5 shows this simple description graphically, where the measured positions of the fiber end-points are also marked.
Fiber end-point curve after transforming the independent variable.
As is usual in the literature, by measuring a single value, such as coordinate y or x, or angle β, the parameter Ω can be calculated with equations (14), (15), or (16), respectively, while measuring, for example, the end-point coordinates yB and xB simultaneously provides two estimations for Ω by using equations (14) and (15). These latter two differ because of errors in the measurements (in the fiber length, end-point position, fiber diameter, and roundness) and possible material inhomogeneities (e.g. in elastic modulus or density). Hence, due to measuring errors and inhomogeneities, the measured points scatter around the theoretical end-point curve (points marked with ‘*’ in Figure 6) or, moreover, they may gather around deviated curves above or below the right curve (points marked by “x” or “o” in Figure 6). The possible positions of the measured end-point sets are depicted in Figure 6. This is also true for the average points of these possible end-point sets (marked by red and blue “ Three possible positions of the measured end-point sets (x, *, o) and their average points (red, cyan, and blue 
The estimated values of the Ω parameter from both coordinates are consistent with each other only if the measured points scatter along the correct curve. If the end-points evaluated from x and y coordinates aggregate around separate points away from the correct curve, they yield different Ω for x and y coordinates. Therefore, it is worth considering an averaging-based evaluation method, which exploits both coordinates of each fiber end-point (unlike conventional approaches using only one coordinate). Two suitable methods can be proposed: the method of average points and the method of individual coordinates.
Average point method
If the average point determined by the measured coordinates x and y does not fall onto the correct curve, the best estimation can be obtained by normal projection of the experimental average point onto the correct curve, calculated by the Runge–Kutta method. Such a point can be obtained as follows. Intersecting the correct curve with the coordinate lines running through the average point separately gives two intersection points on the correct curve, as shown on Figure 6 (black “
The tensile elastic modulus (E) of the fiber can be obtained from equation (19)



The average point method can be applied effectively to determine the average modulus of the fibers if the fiber geometry is consistent or its parameters are of small standard deviations, so that CE can be assumed constant. Otherwise, assessing the error of the modulus is problematic due to non-linearity in the formulations.
Individual coordinates method
In this case the coordinates of each measured end-point (Pi) are handled separately. Ω
x,i
and Ω
y,
I
, determined for the xi and yi coordinates of each Pi, are not averaged, but the individual Ex,i and Ey,I values are calculated with the corresponding CEi and averaged according to equation (21)
Alternatively to the average point method, the reciprocals of the Ω parameters calculated from the individual coordinates of the end-points are averaged here. The error of 
Demonstration of applicability
Calculated parameters for solid fibers

Calculated parameters for hollow fibers before discarding the outlier data points

The following observations can be made from analyzing the data in the tables.
The difference between the Ω
x
and Ω
y
based mean E values (ten data) is minor (<0.15%) for the solid fibers, but in the case of the hollow fibers, the difference is much higher (∼6%). The CV of the bending modulus for the hollow fibers (8.4–11.1%) is higher than that of the solid fibers (7.3–7.8%). The individual coordinate method (20 data; tn,95% = 2.093) is the most advantageous, which gives the lowest relative error of the mean value (MRE) for both the solid (1.7%) and the hollow (2.2%) fibers.
Calculated parameters for hollow fibers after discarding the outlier data points

By measuring both the vertical and the horizontal coordinates of the fiber end-point, and using the individual coordinate method for evaluation, the MRE of the elastic modulus was reduced to 69% or 83% of the original values for the solid and hollow fibers, respectively. In addition, discarding the outliers, by using the determined boundary curves, reduced the number of valuable data points for hollow fibers, but decreased the CV as well. In the case of much more test data, filtering could also be advantageous for the MRE.
Conclusion
The elastic modulus of solid and hollow fibers was determined from fiber deflection tests. Our previous work highlighted that taking only the vertical displacement of the fiber end-point into account results in excessive error and high scatter. In order to reduce the errors, the horizontal displacement was measured as well. The theoretical curve of the fiber end-point was determined with the Runge–Kutta method, and upper and lower boundary curves were found which allowed the identification and filtering of the outliers that were obviously erroneous data points. To make the best use of the test data, two statistical evaluation methods were developed. In order to demonstrate the applicability of the methods developed, some fiber deflection tests were performed on solid and hollow glass fibers. Evaluation using the individual coordinate method resulted in 17–31% reduction in the relative error of the determined mean elastic modulus of the solid and hollow fibers. Discarding four outlier data-points by using the boundary curves provided a 26% reduction in CV for the hollow fibers.
Consequently, the new method can improve the accuracy of modulus evaluation without increasing the number of tested fibers, and it therefore provides more accurate input for analysis of the stiffness of composite structures than the conventional method using only the vertical displacement of the fiber end-point. A future task could be the extensive validation of the new evaluation method on various fiber types.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was connected to the scientific program of the “Development of quality-oriented and harmonized R + D + I strategy and functional model at BME” project, and performed within the framework of the “Talent care and cultivation in the scientific workshops of BME” project. This project was supported by the New Széchenyi Plan (Project ID: TÁMOP-4.2.1/B-09/1/KMR-2010-0002) and by grant number TÁMOP - 4.2.2.B-10/1–2010-0009. This work was supported by the Hungarian National Research, Development and Innovation Office – NKFIH (grant number OTKA K 116070). TC acknowledges the Charles Simonyi scholarship. SK would like to give thanks to the Pro Progressio Foundation for the subsidy provided for the research. GC acknowledges the Hungarian Academy of Sciences for funding through the Post-Doctoral Researcher Programme fellowship scheme and the János Bolyai scholarship.