
Abstract
The purpose of this study is to develop an integral sliding mode intelligent fractional-order backstepping controller based on a fixed-time extended state observer (ISMIFOBC-ESO) to control warp tension. First, the time-varying mathematical model of the let-off system was studied and converted into the state equation. Due to the parameter uncertainty and healed motion of the let-off system, the total external disturbance of the system is unknown. We designed a fixed-time extended state observer to deal with this situation, the estimated total interference is updated into the control algorithm in real time to reduce the tracking error. The nonlinear integral sliding surface is designed and integrated into the backstepping control to ensure the finite time convergence and stability of the algorithm. The fractional-order theory with more degrees of freedom is introduced further to enhance the control accuracy and robustness of the algorithm, the stability is proved by the Lyapunov theorem and the control law is designed. The simulation experiment verifies the effectiveness of the designed scheme compared with the other two controllers in the case of sinusoidal-like signals and step signals.
Keywords
The accuracy of warp tension control has an important impact on the weaving quality and efficiency of the loom. Too little warp tension can easily lead to rough yarn or low weft density, while too great warp tension can lead to yarn breakage and thus stop the machine. It needs manual treatment before weaving, which seriously affects the weaving efficiency. 1 Due to the motion of weft insertion, weft beating, and healed frame in the system, yarn fluctuation is inevitable. With the increase in weaving demand and the adjustment of product structure, the loom speed keeps rising. Therefore, reducing the warp tension fluctuation at high speed becomes the key to improving the performance of the controller.
To improve the performance of the warp system controller, many scholars have studied and designed many efficient control algorithms, such as advanced proportional-integral-derivative (PID) control,2–4 neural network control,5–7 sliding mode control,8–10 and backstepping control,11–13 to achieve high-precision position control. Fuzzy control has been widely used in current industrial control because of its independence from the control model. Pang et al. 14 integrated a neural network into a fuzzy reasoning system, introduced a contraction-expansion factor to achieve effective control of a nonlinear system, and finally optimized the parameters of the fuzzy neural network by particle swarm optimization and a back-propagation algorithm. Jin and Li 15 used fuzzy reasoning to approximate the unknown dynamics of the nonlinear system, designed an adaptive law to estimate the unknown disturbance, and completed a progressive tracking control strategy. Liu et al. 16 used norms to calculate fuzzy weight vectors to reduce the computational complexity of fuzzy reasoning. Fuzzy PID is widely used in modern control because of its simple structure and convenient maintenance. However, it is often difficult to adjust the control parameters for strong nonlinear time-varying systems. Therefore, Liang et al. 17 optimized the parameters of fuzzy PID by designing an improved genetic algorithm, which improved the controller in terms of rise time, response speed, and stability. Because of their strong function approximation ability, neural networks are widely used to deal with unknown dynamics in nonlinear systems. At present, neural networks have made many achievements. Zhu et al. 18 used a neural network as the approximator of unknown interference and introduced a continuous differentiable saturation model to reduce the adverse effect of saturation nonlinearity. The adaptive law of the classic neural network is realized by the gradient algorithm, but in some working conditions, there may be a problem that the convergence speed is slow, and the performance may be reduced. Therefore, Luan et al. 19 developed a new adaptive law to update the weight information of the neural network. In addition, the introduction of sliding mode technology makes the controller converge in a limited time.
Sliding mode control has become a research hotspot for its insensitivity to system parameters and strong anti-interference ability. 20 Classic sliding mode control is prone to chattering due to its symbolic function. Currently, different sliding mode surfaces have been developed to reduce chattering.21–23 Rabiee et al. 24 designed an adaptive sliding mode disturbance observer based on sliding mode theory to estimate external disturbances in a finite time, and output the disturbances observed by the observer to a nonsingular terminal sliding mode controller. Eventually, both the observer error and the system tracking error will converge to the origin in a finite time. The selection of sliding mode controller parameters usually requires a priori knowledge of the upper bound of interference, but the upper bound of interference is generally unmeasurable. Therefore, Yi and Zhai 25 designed a second-order fast nonsingular terminal sliding mode controller to reduce chattering based on improving the stability of the system, and compensate for the unknown uncertainty outside the system by designing an adaptive law.
Backstepping control is a control method that decomposes a high-order nonlinear system into low-order subsystems. This method is completed by constantly designing virtual control variables, and determines the final control input signal by making the Lyapunov function stable. The main problem of backstepping control is the ‘differential explosion' caused by the continuous design of virtual control laws. Currently, there are strategies to solve this problem, such as dynamic surface
26
and filter.
27
The classic backstepping controller is based on understanding the precise dynamics of the system in advance, and its robustness is not strong. Therefore, intelligent backstepping control28–31 has become a research hotspot. To estimate the unknown and unmeasurable states and matching uncertainties outside the system, Deng et al.
32
constructed an extended state observer and adopted a time-delay model to approximate the unmodeled dynamics, to alleviate the 'differential explosion' problem of backstepping control. Feng et al.
33
introduced the integral sliding mode control into the backstepping control, improved the stability and control accuracy of the controller by designing a virtual control quantity with an integral term, and completed the estimation of the upper bound of the total external interference by designing an adaptive law. However, the vast majority of backstepping control is of integer order, and its performance in dealing with complex control systems still needs to be improved. Fractional-order (FO) controllers increase more degrees of freedom than integer-order controllers, improving system robustness and tracking performance.34,35 Considering the above control methods, an intelligent fractional-order (FO) backstepping control with an integral sliding mode based on an extended state observer (ISMIFOBC-ESO) is proposed in this paper to enhance the tension stability and tracking performance of the let-off system. This controller is implemented in the presence of uncertainties and disturbances, such as the time-varying of the weaving axis and the motion of the healed frame. First, the time-varying mathematical model of the let-off system is established. Then, the extended state observer (ESO) is designed to realize the real-time observation of external interference. Next, the design of ISMIFOBC is completed with the Lyapunov theory. Finally, simulation experiments under different signals show that the proposed method is effective and robust to nonlinear systems. The main contributions of this paper are as follows:
The fixed-time extended state observer can converge in a limited time, and the unmodeled part of the system and the nonlinear term of the system can be observed by adjusting the design parameters, which improves the observation and suppression ability of the warp tension control system to external disturbances. In this paper, the second-order auxiliary state equation is established by designing the integral sliding mode surface. The integral term ensures the finite time convergence and stability of the controller. It is proposed to introduce the FO differential and integral terms into the virtual control law. By selecting appropriate control parameters and FO functions, the robustness and response performance of the backstepping control can be further enhanced. Finally, the backstepping control law is designed by the Lyapunov function.
The rest of this paper is structured as follows. In the second section, we get the time-varying mathematical model of the let-off system through the dynamic analysis of the system. The fifth section gives the experimental comparison between the controller and the other two controllers. The final section is the conclusions.
Mathematical model of tension
The theoretical transmission schematic diagram
36
of the let-off system is shown in Figure 1. In Figure 1,
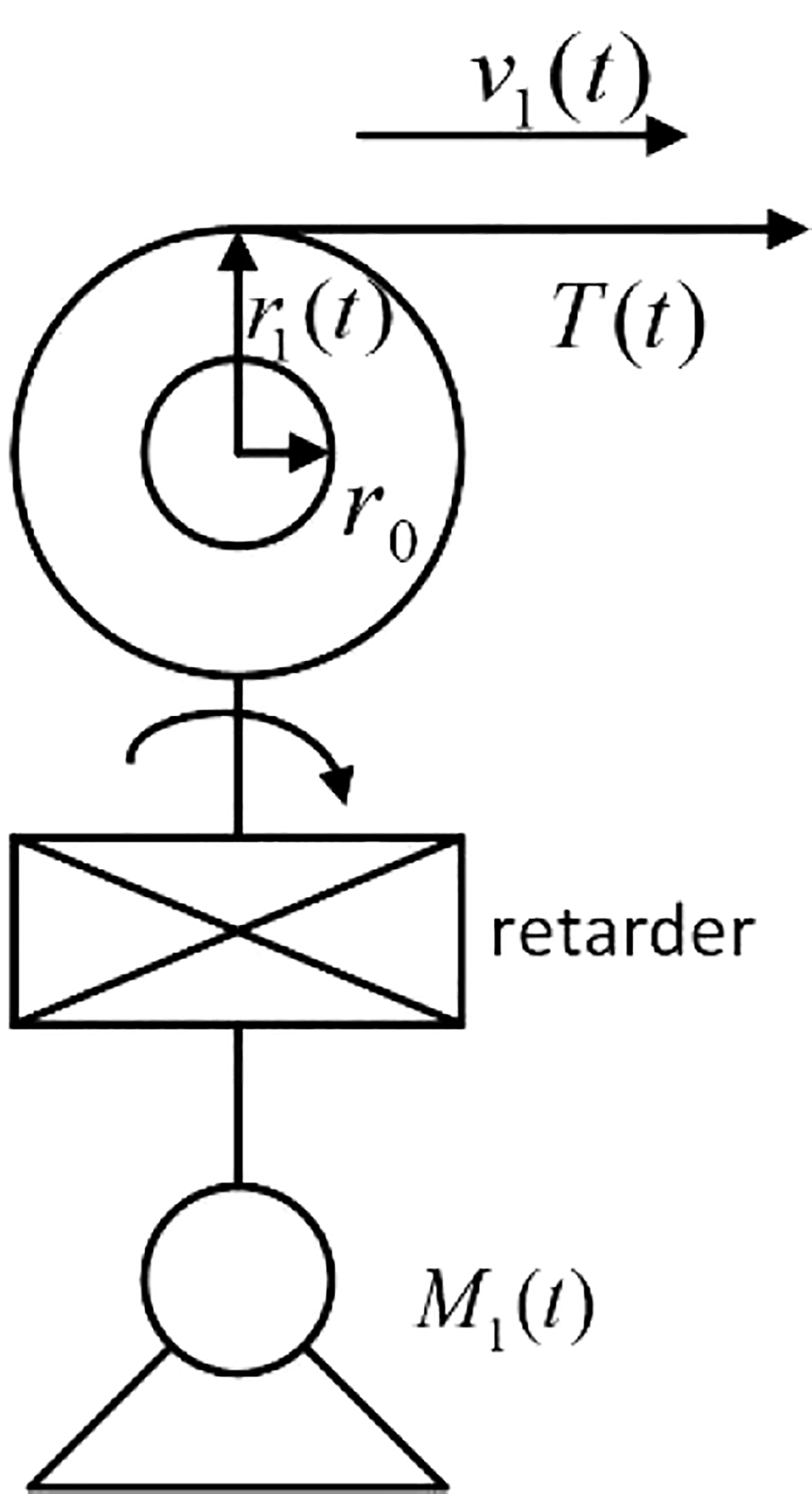
Equivalent transmission schematic diagram.
It is assumed that

The real-time radius can be expressed as follows by equation (1):

The moment of inertia of the warp is expressed as follows:

In combination with equation (2) and equation (3),

The tension torque of warp yarn is expressed as follows:

The friction torque of the warp shaft is expressed as follows:

The electromagnetic torque and friction torque of the warp shaft are in the same direction, and the two directions are opposite to the tension torque. The kinematics equation of the warp shaft can be described as follows:

In combination with equation (4), equation (6) and equation (7),

The yarn tension

The two successive derivations of equation (9) can be expressed as follows:

By combining equation (1), equation (2) and equation (3), the following second-order differential equation of let off system with form



Define the state variable as

Considering


Design and preparation of fixed time extended state observer
Lemma and hypothesis
The following system is assumed:

Design of fixed-time extended state observer
Advanced algorithms need to obtain more state variables of the system, but often some state variables are not measurable or easy to measure, so a more accurate state variable estimation algorithm is needed. The imprecision of modeling and external interference is the main reason that affects the operation accuracy of the system. An improved extended state observer for observing external interference
The above equation of state is extended to the following form:

Basin et al.
37
designed a timing convergence observer, on this basis, to estimate accurately the total interference of the above equation, an improved fixed-time extended state observer is designed:



Define the error vector

The matrix

If


The second part of the observer is designed as follows:

The matrix

The existence of symmetric positive definite matrix


Define the error vector


All the convergence time obtained above is

Due to the influence of noise, signal delay and interference, it is impossible for the above equation to be equal to 0. According to the convergence proof given in Basin et al.,
37

Therefore, the fixed time convergence proof of the observer is completed above, and the upper bound of the convergence time is
Integral sliding mode intelligent FO backstepping controller
Preliminaries of FO calculus
When the order of differential and integral changes from integer to real, the concept of FO calculus comes into being. The Riemann–Liouville fractional integration formula is widely used. The integration of RL


When the order




Unlike IO calculus, FO calculus can provide more degrees of freedom in operation. By selecting appropriate functions and orders, the control accuracy of the controller can be improved. In the subsequent control,
Integral sliding mode intelligent FO backstepping controller
Due to the time-varying characteristics of the winding diameter of the loom and the complex interference caused by the motor vibration, weft insertion, and beating, it is a challenge to realize the stable delivery of warp under a certain tension. The goal of the designed controller is to achieve high-precision let-off on the premise of minimizing the error. The tracking error is defined as follows:

To improve the backstepping control performance and complete the convergence of the controller error in a limited time, the integral terminal sliding mode is combined with the backstepping controller. The controller design is as follows:

Select the Lyapunov function as:

Derivate the above function to obtain:

When the sliding surface takes 0, the expression about

Substituting



It is known from the Lyapunov function that when the system converges to the origin, it satisfies

After transformation, it is given as follows:

Assuming that the time from state

After simple transformation, the following results are obtained:

Therefore, according to the Lyapunov stability theory, the system can converge to the origin in a limited time, and at this time, the sliding mode surface
Derivate the sliding surface to obtain:

Then continue to calculate the second derivative of the sliding surface to obtain:


The first derivative and the second derivative of the sliding surface are combined to obtain the state equation about

The integral term can improve the steady-state performance of the system. Therefore, the integral term is combined with the sliding mode control and backstepping control. The integral term is designed as:

The purpose of the controller is to make


The tracking error of the state variable

In order to improve the performance of the controller, FO calculus is introduced into the virtual control law. Set

To construct the subsequent Lyapunov function, the modified equation (53) is obtained as follows:

Substituting equation (55) into equation (52) yields:

Then, the integration error

In order to make the error


Combining equation (56), equation (57) and equation (59), we obtain:




Substituting equation (49) into the above equation, we get:

The total disturbance

So
Substituting the control law into the above equation, we can get:

Therefore, it can be known from Lyapunov theory that the system is negative definite, indicating that the system variables of the sliding mode surface and the system tracking error will converge to the origin in a limited time, which completes the proof.
Simulation and experiment
Simulation
In order to verify the efficiency of the algorithm designed in this paper, the PID controller based on the traditional extended state observer and the backstepping controller based on the traditional extended state observer are selected and compared under different experimental conditions. The selection of the following controller parameters is determined by the better control effect obtained from the simulation experiment.
The control input of the PID method with ESO (PID + ESO) is:
The backstepping control input with ESO (BC + ESO) is:
where


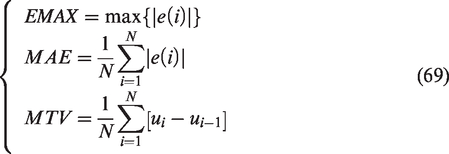
To evaluate better the control performance of the three control algorithms, three indicators of the maximum absolute value of error (EMAX), the mean absolute error (MAE), and the mean total variation (MTV) are used for comparison. The three indicators are described as follows:
This test is divided into two working conditions for discussion, both of which are conducted under the following let-off system state equation:

In the first working condition, select a sinusoidal-like signal
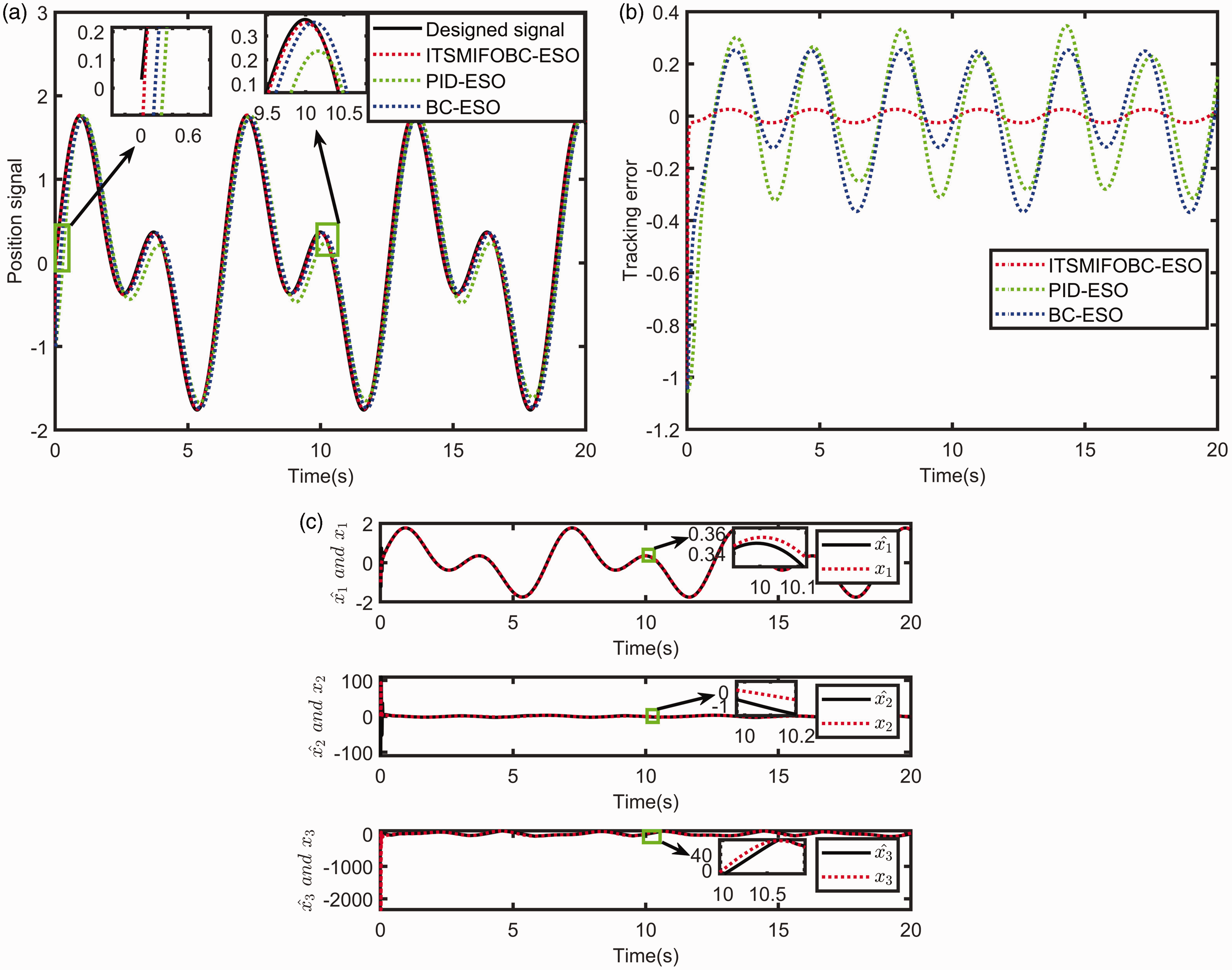
Control effect under sinusoidal-like signal. (a) Position control effect; (b) position control error and (c) estimation effect of extended state observer.
Control performance index

BC-ESO: backstepping controller with extended state observer; EMAX: maximum absolute value of error; ITSMIFOBC-ESO: integral sliding mode intelligent fractional-order backstepping controller based on extended state observer; MAE: mean absolute error; PID-ESO: proportional-integral-derivative controller with extended state observer.
As shown in Figure 2(a), due to the introduction of sliding mode theory, fractional calculus, and integral term, the ITSMIFOBC-ESO controller can track the ideal signal faster and more stably than the other two algorithms, because the controller has lower EMAX and MAE values. Figure 2(b) shows the tracking errors of the three control algorithms. It can be seen that the ITSMIFOBC-ESO controller shows higher precision control effects than the PID-ESO controller and BC-ESO controller. Figure 2(c) shows the estimated value of the extended state observer for the system state variables. The actual state variables of the system and the estimated state variables have little difference, which can track the future trend of the system well. This reflects the effectiveness of the designed extended state observer for the system state observation. The estimated total disturbance of the system is updated into the control law in real time, which is beneficial to improving the tracking performance of the controller.
To verify further the control performance of the designed control algorithm, the step signal is selected as the tracking signal in the second working condition, and interference

Control effect under step signal. (a) Position control effect; (b) position control error and (c) estimation effect of extended state observer.
Control performance index
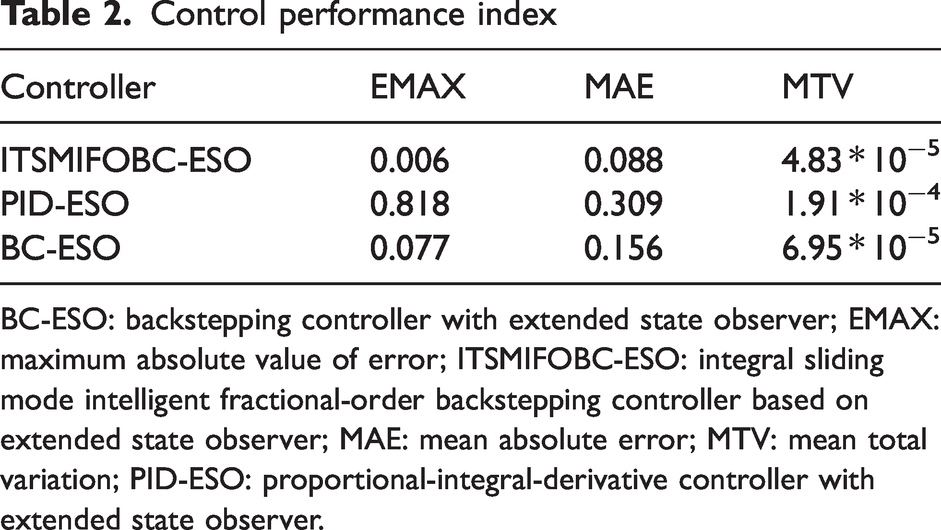
BC-ESO: backstepping controller with extended state observer; EMAX: maximum absolute value of error; ITSMIFOBC-ESO: integral sliding mode intelligent fractional-order backstepping controller based on extended state observer; MAE: mean absolute error; MTV: mean total variation; PID-ESO: proportional-integral-derivative controller with extended state observer.
Experiment
To verify the effectiveness of the above control method on the actual experimental platform, the method was applied to the tension tracking control experiment of the let-off system, and the tracking effect and control input were compared with the PID-ESO and BC-ESO. The experimental platform is jointly controlled by the Field Programmable Gate Array (FPGA) and the 32-bit series microcontroller produced by STMicroelectronics (STM32). The FPGA collects the tension signal and the speed of the let-off motor and transmits it to the STM32 through serial peripheral interface (SPI). The STM32 completes the data reception and processing of three control algorithms, and finally outputs the control quantity to control the let-off motor, as shown in Figure 4. The experiment was carried out under the expected tension of 1.56 N. The tracking effects of the three control methods and the output of the let-off motor are shown in Figure 5, and their control indicators are compared in Table 3.

Experimental platform.
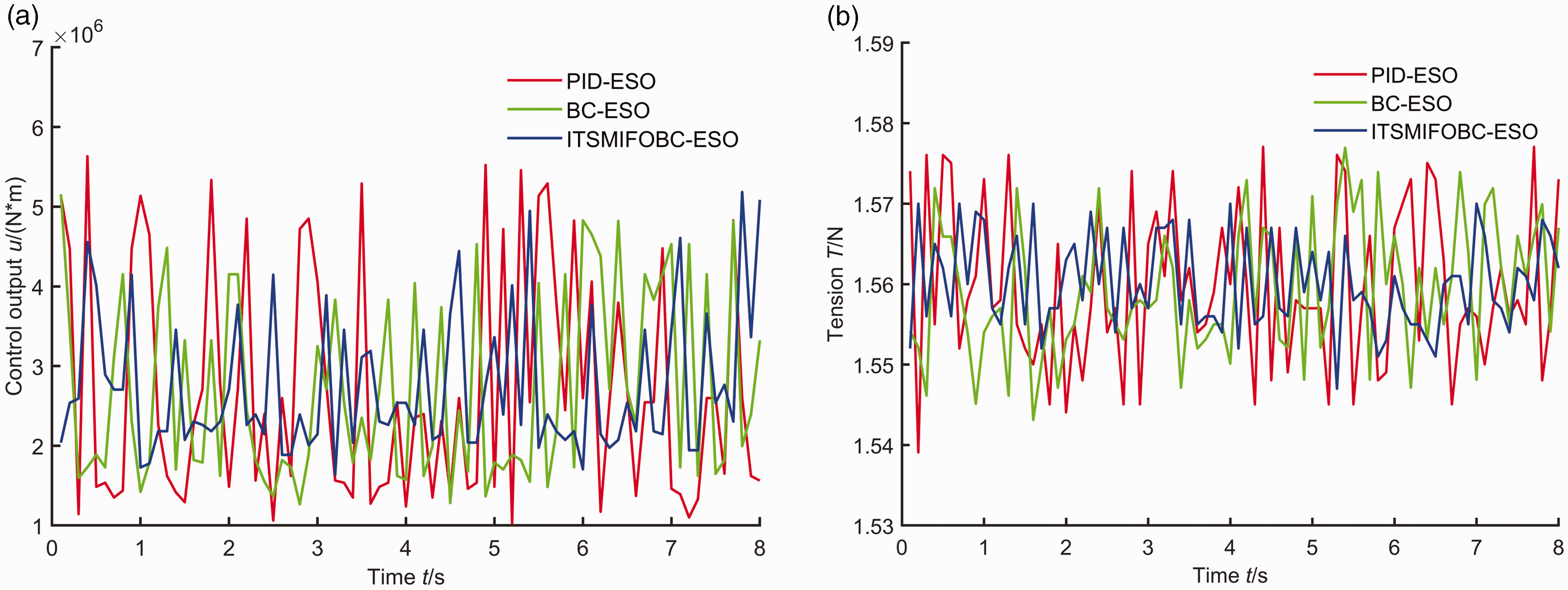
(a) Output of the let-off motor and (b) tracking effect.
Control performance index
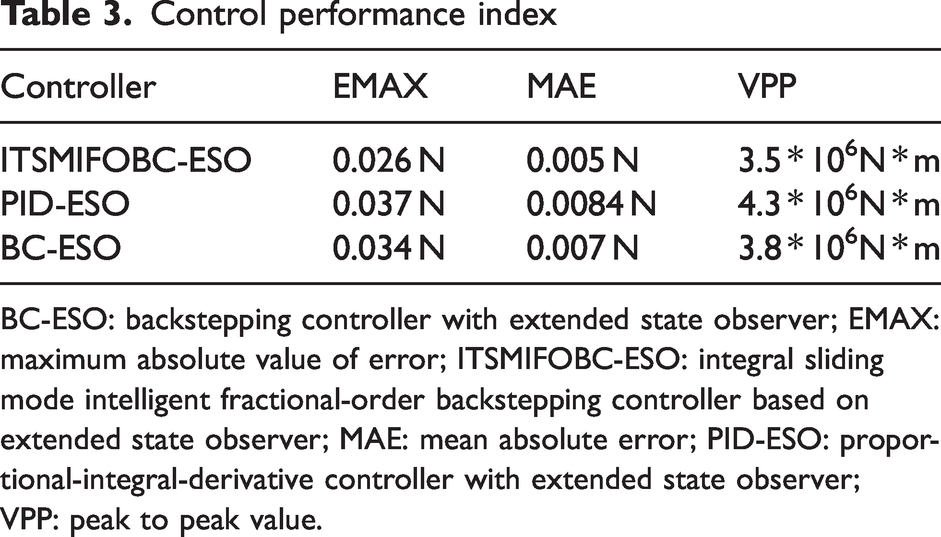
BC-ESO: backstepping controller with extended state observer; EMAX: maximum absolute value of error; ITSMIFOBC-ESO: integral sliding mode intelligent fractional-order backstepping controller based on extended state observer; MAE: mean absolute error; PID-ESO: proportional-integral-derivative controller with extended state observer; VPP: peak to peak value.
Data acquisition of the three control methods was carried out after 5 s operation on the experimental platform. As can be seen from the observation in Figure 5, the three groups of experiments were constantly fluctuating and stabilized to a certain range, which was caused by factors such as the denaturation of the diameter of the warp shaft and motor vibration. Among them, the maximum absolute error of tension of methods PID-ESO, BC-ESO and ITSMIFOBC-ESO is 0.037 N, 0.034 N and 0.026 N, respectively, and the peak to peak value (VPP) of control output is 4.3*106N*m, 3.8*106N*m and 3.5*106N*m, respectively. Obviously, the ITSMIFOBC-ESO has better control performance and output stability than the other two control strategies. According to the analysis of Figure 5 and experimental data, the PID-ESO and BC-ESO are not highly adaptive, and constant controller parameters cannot effectively deal with external unknown interference. Both controllers show limited performance and have great room for improvement in tracking response. The ITSMIFOBC-ESO does not require accurate modeling information of the system, after debugging of the extended state observer and controller parameters, the average absolute tracking error has a good performance, among which the average absolute error of the three controllers is 0.0084 N, 0.007 N and 0.005 N, respectively. In the proposed ITSMIFOBC-ESO control strategy, the extended state observer accurately estimates the external interference with the constant change of the operating state, the high robustness of sliding mode backstepping control and the constant adjustment of FO virtual control law improve the tracking accuracy of tension. The ITSMIFOBC-ESO can react quickly according to the change of spinning shaft diameter of the let-off system, and output stable control law to cope with the strong nonlinearity of the let-off system. By analyzing the above summary, it can be seen that the ITSMIFOBC-ESO has high tracking accuracy and anti-interference performance, high stability of control output, and high robustness.
Conclusions
In this study, we demonstrate the effectiveness of the designed ITSMIFOC-ESO in the warp tension control of the let-off system. First, the dynamic analysis of the system is carried out, and the time-varying mathematical model is obtained. Second, a fixed-time extended state observer is designed effectively to estimate the external interference of the motion of the healed frame and motor vibration. To generate more efficient control signals and improve the tension stability of warp yarns, the integral sliding surface is designed and applied to backstepping control. In addition, we propose a strategy to integrate the FO theory into the virtual control law, which further improves the precision of the controller. Finally, the adaptive control law of the ITSMIFOC-ESO is derived based on the stability theory of the Lyapunov function. We demonstrate the performance of the control method through simulation and platform experiments to illustrate the good control performance and stability of the proposed ITSMIFOC-ESO.
Compared with the existing research, the characteristics and contributions of this study are as follows:
By selecting appropriate parameters, the fixed-time extended state observer can converge rapidly when it is far away from the equilibrium state and close to the equilibrium state, and update the state to the subsequent control algorithm to improve the robustness of the warp tension control. An integral sliding mode surface is designed, and the sliding mode control is integrated into the backstepping control to enhance the stability and anti-interference of the control algorithm. The FO theory is introduced into the virtual control law, which brings more freedom to the algorithm and further improves the control accuracy. The three control algorithms are compared by simulation and experiment, and the results show that the designed ITSMIFOC-ESO control method is superior to other control methods in terms of control performance and robustness. The ITSMIFOC-ESO controller works well with fast response, high stability and good tracking performance. When there is interference in the model, the controller ITSMIFOC-ESO still maintains high control accuracy and has strong robustness to external unknown interference, which has high application value for improving weaving performance and various weaving requirements.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51805402).