
Abstract
Like early work on human intergroup interaction, previous research on people’s willingness to interact with robots has focused mainly on effects of anxiety. However, existing findings suggest that other negative emotions as well as some positive emotions also have effects. This article systematically examines the roles of positive and negative emotions in predicting willingness to interact with robots, using an integrative analysis of data across five studies that use diverse interaction conditions and several types of robots. We hypothesize and find that positive emotions account for more variance than negative emotions. Practically, the findings suggest new strategies for interventions, aimed at increasing positive emotions to increase willingness to engage in intergroup interaction. No existing work has examined whether positive emotions are stronger predictors than negative emotions for willingness for human intergroup interaction, an important topic for future research.
Interacting with humans who are different from ourselves can be challenging due to misunderstanding, ignorance, or feelings of anxiety, for instance (Stephan & Stephan, 1985). Yet such interaction can produce real rewards. Individual rewards may include broadening our horizons and gaining insights into unfamiliar cultures, while larger scale positive outcomes include the benefits of diverse experiences for self-expansion (Aron & Aron, 1997), cognitive openness and flexibility, creativity, and good decision-making (Hodson et al., 2018).
In situations such as diverse schools or workplaces, intergroup contact may be more or less obligatory. But often contact can be voluntarily chosen or avoided. This article focuses on willingness to interact with out-group members rather than related variables such as prejudice, because willingness to interact is future-oriented, likely to affect actual later interactions. Given the well-documented efficacy of intergroup contact in reducing prejudice (Pettigrew & Tropp, 2006), willingness to interact should indirectly lead to reduced prejudice, perhaps even setting off a self-reinforcing cycle as interaction reduces prejudice, further increasing willingness to interact, and so on. The importance of willingness to engage in contact is underlined by findings that even in diverse environments; intergroup contact is often severely limited as people preferentially interact with others who are similar to themselves (Paolini et al., 2018; Pettigrew & Tropp, 2011). Paolini et al. note that develop[ing] a deeper understanding of the factors that propel individuals towards fully engaging with diversity in real settings and a greater appreciation of the psychological factors that mute these responses . . . are the new and big challenges for the next generation of intergroup contact research. (p. 4)
What factors encourage or discourage people from pursuing interaction with members of different groups, such as cultural or racial/ethnic groups? This article focuses on the potentially powerful effects of emotions that people feel toward an out-group (Mackie & Smith, 2018). For example, feelings of anxiety or anger toward an out-group can motivate people to avoid interracial interactions (Plant, 2004; Plant et al., 2008).
Parallel issues apply when an intergroup encounter involves robots instead of human out-groups. This is a situation that is taking on clear practical importance as well as conceptual interest. Humans interact with robots now and will increasingly do so in the near future. These interactions will involve not only trained technicians and engineers in factory and warehouse jobs, but ordinary people in classrooms, elderly care facilities, and hospitals (Broadbent, 2017). Just as emotions shape people’s willingness to interact with members of human out-groups, emotions can encourage or discourage interactions with robots. Some previous work has examined effects of anxiety (Nomura et al., 2006) and enjoyment (Heerink et al., 2008). However, there have been no systematic efforts to capture the diverse emotional experiences that might arise when anticipating human–robot interaction (HRI), or to assess the relative importance of different emotions.
In this article, we report analyses of data from several studies drawn from our program of research on HRI. We conceptualize HRI as an intergroup phenomenon, drawing on theory and research regarding intergroup interaction in general to make informed predictions for HRI (Reeves & Nass, 1996; Fraune, Sherrin, Šabanović, & Smith, 2015). Although these studies differed in their designs and experimental manipulations, all contained similar measures of emotions toward robots and of willingness to interact with robots. By analyzing several studies together, we attain higher power, as well as the ability to reveal patterns that hold across variation in specific aspects of the studies (e.g., the type of robot used).
Basic Information About the Five Studies Analyzed Here.

Note. Study 1 uses U.S. participants from the study described in Fraune, Nishiwaki, et al. (2017) which also had participants from Japan. Study 2 was described in Fraune, Sherrin, Šabanović, & Smith, 2015. Additional details about study procedures are included in supplemental materials.
Emotions and Willingness to Interact With Out-Groups
A number of distinct emotions have been found relevant in human intergroup interaction. Anxiety was an early focus of research, which investigated its negative effects in anticipation of or during intergroup interactions (Stephan & Stephan, 1985). More recent work shows that positive emotions often significantly predict prejudice or the desire or intention to interact with out-groups, even when effects of negative emotions are statistically controlled (e.g., Miller et al., 2004; Pettigrew, 1998; Seger et al., 2017). Miller et al. (2004) in two studies found that a measure of positive emotions (compared with negative emotions) was a stronger mediator of effects of past intergroup contact on prejudice. Seger and colleagues (2017), using nationally representative samples, found that admiration played a stronger role than anger in mediating the relationship between past contact with an ethnic out-group and prejudice toward that out-group. Some research has focused on the roles of several distinct positive emotions, such as happiness, admiration, and sympathy (e.g., Pettigrew, 1998; Seger et al., 2017), as well as distinct negative emotions such as fear, anger, and disgust (Cottrell & Neuberg, 2005; Plant et al., 2008). Overall, it is clear that a variety of emotions may be experienced toward out-groups, based on appraisals of their relationships to the perceiver’s in-group (e.g., whether the out-group is seen as an ally or threat), and in turn leading to differentiated action tendencies (e.g., support, approach, avoid, or attack; Mackie & Smith, 2018).
The specific issue we address in this article is the relative effects of positive and negative emotions on willingness to engage in intergroup contact. The question is consequential both theoretically and practically. For example, knowing whether reductions in negative emotions or increases in positive emotions would have a larger effect on willingness to interact could allow for more informed interventions. Different types of informational messages or different structuring of intergroup contact situations might be more effective, depending on whether the goal is reducing negativity versus increasing positivity.
There is little past work on this issue with human out-groups because the great majority of studies have used single, bipolar measures of attitude or affect. For example, seminal research by Esses and Dovidio (2002) found that affect toward an out-group predicted willingness to engage in intergroup contact, but their study used a bipolar measure (positive affect at one end, negative at the other). Such studies cannot examine the separate predictive power of positive emotion versus negative emotion. This issue was emphasized recently by Greenwald and Pettigrew (2014) in a slightly different context, examining the relative effects on intergroup discrimination of favorability toward an in-group versus negativity toward an out-group. These are conceptually and (potentially) empirically separable, opening up the key question of which is more important in driving behavioral discrimination. Greenwald and Pettigrew argue on both conceptual and empirical grounds that for ethnic groups in the U.S. today, biased acts are driven more by in-group favorability than by out-group negativity. However, they note that because most existing studies rely on bipolar measures of attitude or emotion, they cannot test this hypothesis. A finding that relative preference for in-groups over out-groups predicts bias tells us nothing about the separate effects of in-group positivity and out-group negativity.
Besides the typical use of single bipolar measures, another factor limits the ability of previous research to support strong conclusions regarding the relative effects of positive and negative emotions. Different studies often focus on different emotions (often just one or two specific emotions per study), hindering cross-study comparisons and the emergence of conclusions that generalize across individual studies.
One recent paper (Barlow et al., 2019) examined an issue closely related to our focus: effects of past positive or negative intergroup contact on a positive emotion (warmth) and a negative emotion (anger). They found that past negative contact increases anger much more than it decreases warmth, and past positive contact increases warmth much more than it decreases anger. Thus, anger and warmth arise somewhat independently based on different types of past intergroup experiences, rather than reflecting an underlying bipolar scale (with anger and warmth strongly negatively correlated). This work complements ours by looking at effects of past contact on positive and negative emotions, but it does not address the effects of positive and negative emotions on willingness to engage in future contact, the focus of this article. In addition, the analysis of only two specific emotions (warmth and anger) leaves open questions about effects of affective positivity and negativity more broadly.
Emotions and Willingness to Interact With Robots
Since the pioneering work of Reeves and Nass (1996), HRI has been studied within the “CASA” (computers as social actors) framework, which holds that people perceive and react to computational artifacts in similar ways as they react to other humans. For example, especially if they are humanoid in appearance and autonomous in action, robots elicit attributions of gendered characteristics (Eyssel & Hegel, 2012), are treated with politeness (Reeves & Nass, 1996), and can be regarded as members of in-groups or out-groups (Eyssel & Kuchenbrandt, 2012). The CASA perspective suggests that conceptual frameworks developed to understand human intergroup interaction, such as the social identity perspective, can fruitfully be applied to humans’ interactions with robots. In fact, reactions to robots often resemble reactions to human out-groups (e.g., immigrants or ethnic minorities), including the idea that they have different values than we do, might take our jobs, or could physically harm us. In addition, although robots are actually nonhuman, human out-groups are commonly perceived in dehumanizing terms. Findings regarding emotions and intergroup contact are therefore theoretically expected to show important similarities between human and robot out-groups.
Indeed, parallel with early work on human intergroup relations, research on HRI has often focused on anxiety as a central barrier to willingness to interact with robots (e.g., the NARS measure; Nomura et al., 2006). Anxiety can be produced by ignorance about how to interact with robots, fear of being physically harmed, or even by broader concerns about potential negative impacts of robots on society such as taking human jobs or causing confusion about what it means to be human. Disgust is another potential emotional response to robots; research on perceptions of robots has sometimes suggested the existence of an “uncanny valley,” the idea that certain robots can evoke not only anxiety, but feelings of eeriness, disgust, and even pity (Ho et al., 2008).
Recent research on HRI has also begun to consider positive emotions, such as excitement or enjoyment. In fact, individuals can experience both positive and negative emotions when thinking about or interacting with robots. Positive emotions have been reported in children playing with a dog-like robot (Weiss et al., 2009), and in older adults interacting with the seal-like robot Paro (Takayanagi et al., 2014). Research and theory suggest that both anxiety and positive emotions such as excitement predict attitudes and behavior toward robots. For example, the Almere model of acceptance of robots (Heerink et al., 2008) includes both negative emotions (anxiety) and positive feelings (enjoyment). De Graaf and Allouch (2013) found that feelings of enjoyment with robots are a stronger predictor of attitudes toward using robots than feelings of anxiety as measured by NARS.
Goals of This Study
Our main hypothesis is that positive emotions will predict willingness to interact with robots even when controlling for negative emotions. In fact, we make the stronger prediction that positive emotions will account for more variance than negative emotions. This prediction rests in part on previous findings on conceptually related dependent variables, by Seger and colleagues (2017) and Miller and colleagues (2004) on predicting prejudice against human out-groups, and by de Graaf and Allouch (2013) on predicting attitudes toward using robots. Our prediction also parallels Greenwald and Pettigrew’s (2014) hypothesis that in-group positivity will influence intergroup bias more strongly than out-group negativity (although we consider positive vs. negative feelings toward the out-group, rather than positive feelings toward the in-group vs. negative feelings toward the out-group).
We examine effects of different emotions on willingness to interact with robots in two ways. We use scales composed of several emotions, such as positive versus negative emotions, and also offer more exploratory analyses of nine distinct emotions that may have unique and specific effects.
Our approach in this article has several strengths. First, we apply a type of “integrative data analysis” (Curran & Hussong, 2009) by combining several studies that include a common set of measures of the key variables, to obtain a large N and therefore high power. Power is important to disentangle the effects of emotions that may be moderately to highly correlated (e.g., anxiety vs. fear).
Second, we measure self-reported willingness to interact with robots across a range of situations and contexts. We have no behavioral measure, but the measure of willingness has the advantage of freedom from practical constraints: We can ask about interaction in circumstances (e.g., construction, military service, or other dangerous settings) that would be practically or ethically impossible to reproduce in a study. Willingness to interact measures are frequently studied in interpersonal or intergroup relations (e.g., Binder et al., 2009; Plant et al., 2008; Weaver, 2008) and are closely related to other constructs such as behavioral intentions and actual behaviors (Webb & Sheeran, 2006).
Third, as noted above, we measure a range of emotions and analyze them simultaneously, to see the unique effect of each emotion or emotion scale. Studies that measure only anxiety, or only anxiety and enjoyment, may fail to capture the full range of emotional experiences that are potentially relevant to people’s willingness to interact with robots. In addition, because distinct emotions are often correlated, only weak conclusions can be drawn from any study that measures only one or a few emotions. For example, a study that measured only anxiety and found a significant effect might actually be seeing an effect of some other correlated emotion (perhaps fear, sadness, or disgust), a misattribution that can be avoided only by measuring multiple emotions and including them in a simultaneous analysis.
Fourth, we use a Bayesian multilevel analytic approach. As will be described later, this permits us to draw conclusions about the effects of emotions that generalize not only across participants but also across multiple conditions in multiple studies, by including conditions and studies as well as participants as random factors in the analysis.
Method
Data
The data come from five HRI studies from our lab (see Table 1 and Figure 1 for details; total N = 1,014). In each study, participants were exposed to one or more robots, of different types in different studies, either in direct interaction or by viewing a video, and then completed questionnaires. More details on the study procedures are included in the supplemental materials available at https://osf.io/7eht5/. All studies included measures of emotions when thinking about or interacting with robots, as well as willingness to interact with robots in a variety of contexts. The measures were worded slightly differently in different studies, but our analytic approach (described below) reveals findings that emerge consistently despite this and other differences between studies.

Robots used in the five studies analyzed here (see Table 1 for details).
Measures
Emotions
We measured nine distinct emotions in all five studies: excitement, happiness, sympathy, respect, pity, sadness, anxiety, fear, and disgust. Some studies included additional emotion items, but these analyses of the combined data focus on the emotions that were common across all the studies. In some studies the question was “When you think about robots in the near future, to what extent do you feel each of the following?” with the individual emotion words listed above, using a 7-point response scale from “none at all” to “very much.” In other studies, the emotion measure used short statements such as “I feel disgust toward robots” and “I respect robots,” with a 5-point response scale from “strongly disagree” to “strongly agree.” For the combined analyses, ratings on a 5-point scale were algebraically rescaled to a 7-point scale.
Willingness to interact with robots
Each study included a measure of willingness to interact with robots. In most studies, the measure asked participants to rate “In which contexts would YOU prefer to interact with robots?” or “In each of the following contexts, to what extent would you be willing to have a robot (or robots) assist you?” providing a number of contexts (e.g., at home, at work). The 5-point response scale went from “not at all” to “to a great extent.” In one study (Study 2 in the table), we asked participants “which contexts do you think robots should work in?” providing similar contexts. Because the two measures of willingness to interact with robots are conceptually similar, subsequent analyses combined studies that included either measure, to see whether major conclusions hold across these minor differences in question wording. Separate factor analyses for each study revealed clear one-dimensional solutions. As a result, we averaged willingness items across all contexts into a single score for each participant. Alpha reliabilities of this measure for Studies 1 to 5 were, respectively, .85, .87, .92, .94, .91.
Analytic Plan
Our primary analysis examines the extent to which emotions predict willingness to interact with robots. We investigate this question at two different levels of aggregation. First, we investigated the role of different empirically and theoretically based emotion groups (e.g., positive, negative, anxiety). Our hypotheses particularly concern the relative variance accounted for by positive versus negative emotion groups. We also investigated the role of the nine specific emotions, rather than groups of emotions. Here, we were interested in the dissociable role of discrete emotions (e.g., anxiety vs. disgust).
Table 1 provides information about the studies that are analyzed here, including the type of robot used and the nature of participants’ experience with the robot (live interaction vs. viewing a video). Across the five studies, there are a total of 1,014 participants and 25 distinct conditions. We conducted a combined analysis of all conditions and studies. In contrast to a meta-analysis, which combines results across studies based only on summary statistics such as effect sizes and Ns, we use a type of “integrative data analysis” (Curran & Hussong, 2009) using the raw data from all studies.
There are different ways to approach such an analysis. We use a multilevel model, with participants nested within conditions (25 conditions total) which in turn are nested within studies (five studies), treating both condition and study as well as participants as random factors. This is analogous to a multilevel analysis of educational data with students nested within classrooms within schools. As our studies used different types of robots, different modes of interaction, and so on, studies are expected to account for variance in responses (Kenny & Judd, 2019), as are the specific manipulations that differentiate conditions within studies.
Conceptually, the multilevel approach allows us to examine whether the emotion measures predict significantly, taking account of both random variation due to participants (as in any standard analysis) and also random variation due to conditions and studies (Brauer & Curtin, 2017; Kenny & Judd, 2019). Each analysis includes the emotion measures as fixed effects, as well as random intercepts and random slopes for each emotion measure, by study and condition.
As an alternative to a multilevel model, some integrative data analyses use a fixed-effects model in which conditions and studies are regarded not as a random source of variation but as a fixed factor (Curran & Hussong, 2009). In this approach, conditions or studies would be coded as a categorical or dummy variable, which accounts for between-condition or between-study variation and allows unconfounded estimation of the effects of the emotion measures. The advantage of the multilevel approach over a fixed-effect analysis is that the former provides quantitative estimates of the variation in results due to the random factors (here, study and condition). Such variation is ubiquitous (Kenny & Judd, 2019). Correspondingly, the multilevel approach provides results that are expected to generalize to other levels of the random factors (other studies and conditions) beyond those included in the analysis, just as typical data-analytic approaches identify findings expected to generalize to other participants beyond those included in the analysis. The fixed-effects approach does not provide evidence for such generalizability. As Curran and Hussong (2009) note, in the random-effects framework we treat the set of independent samples as random draws from a population and can thus (in principle) make inferences back to an infinite population of samples. In contrast, in the fixed-effects framework we treat the set of independent samples as fixed and known and are thus able to make inferences back only to the specific samples under study. (p. 94)
For the multilevel analyses, we initially used the lmer() function in the lme4 R package (Bates et al., 2015). The model was specified with the formula (willingness ~ Pos + Neg + (1 + Pos + Neg | Study / Cond)), indicating that willingness (dependent variable) is predicted by positive and negative emotion scores, allowing for random intercepts and random slopes of both predictors by condition nested within study. With this model and several variants, the lmer() function produced convergence or singularity errors, so we turned instead to a Bayesian approach to estimating the model. Such an approach is recommended by Brauer and Curtin (2017, footnote 18) as well as by Bolker (one of the authors of the lme4 package): “Bayesian approaches allow the user to specify an informative prior that avoids singularity” (Bolker, 2019). We used the stan_lmer() function of the rstanarm package (version 2.18.2; Muth et al., 2018). Like any Bayesian analysis, this takes as input the model specification (in the same notation as for lmer()), a specification of the prior distributions for the parameters (describing the uncertainty about parameters before examining the data), and the observed data. We used the function’s default, weakly informative priors: a normal distribution with mean zero and standard deviation 10—symbolized as N(0, 10)—for the intercept, N(0, 2.5) for each regression coefficient, and an exponential distribution with rate 1 for the residual variance (sigma). For the variance-covariance matrix of random effects parameters, we used the default “decov” function with parameters (1,1,1,1) (see Muth et al., 2018).
As output, the analysis generates a posterior distribution of all parameters, indicating the credible values of parameters after the data are taken into account, from which point estimates and credible intervals are derived. The function uses the Markov chain Monte Carlo (MCMC) approach to estimation, an iterative procedure that computes the posterior distribution given the model, priors, and data (for technical detail see Betancourt, 2017; Muth et al., 2018). We used at least 4,000 iterations for each model, and diagnostics are used to check that the Monte Carlo chains converge properly and provide accurate estimates of the posterior distribution. The data and analysis scripts are available at https://osf.io/7eht5/.
This article’s tables and figures report the estimates and 95% posterior (or credible) intervals for model parameters, focusing on the regression coefficients relating willingness to interact to the emotion measures. We also use the posterior distribution generated by the estimation procedure to examine the specific hypothesis that the effect of positive emotions will be greater in magnitude than the effect of negative emotions.
Results
Correlations Among Emotions
Figure 2 displays the correlations of the nine emotions studied. The emotions correlate as high as the .6 range for the pairs anxiety/fear and excitement/happiness. As noted earlier, the fact that distinct emotions are often correlated limits the strength of conclusions that can be drawn from any study that measures only one or a few emotions. Negative emotions (the first five listed) tend to cluster together, as do the four positive emotions; correlations between positive and negative emotions are generally near 0 rather than strongly negative.

Correlations among emotions.
Explaining Willingness to Interact
Emotion groups
Our first analyses focus on the role of different emotion groups (e.g., positive, negative) on willingness to interact with robots. As emotion groups, we first examined positive and negative emotions, and then distinguished anxiety-related emotions from other negative emotions, based on empirical findings and theoretical reasoning.
Positive and negative emotions
To validate the distinction between positive and negative emotions, we first conducted an exploratory factor analysis (principal components analysis with oblimin rotation) on the nine emotions. The scree plot (Figure 3) showed a clear two-factor solution, accounting for 58% of the total variance in the emotion items. In Table 2, the first factor represents negative emotions (33% of total variance), with anxiety, disgust, fear, pity, and sadness having strong positive loadings onto the factor. The second factor, positive emotions (24% of total variance), included high positive loadings for happiness, respect, excitement, and sympathy. Importantly, the correlation between these two factors was quite low (r = −.10), suggesting a clear distinction between them. We then centered each emotion measure in each condition (Brauer & Curtin, 2017). We created unit-weighted composite scores for negative emotions and positive emotions based on the unstandardized emotion measures, which had scale alpha reliabilities of .77 and .72, respectively. The means were 2.29 (95% confidence interval [CI] = [2.23, 2.35]) for negative and 3.89 (95% CI = [3.81, 3.97]) for positive; positive emotions were reported with much higher intensity than negative.

Scree plot of factor analysis of nine discrete emotions.
Factor Analysis Results for Nine Discrete Emotions.
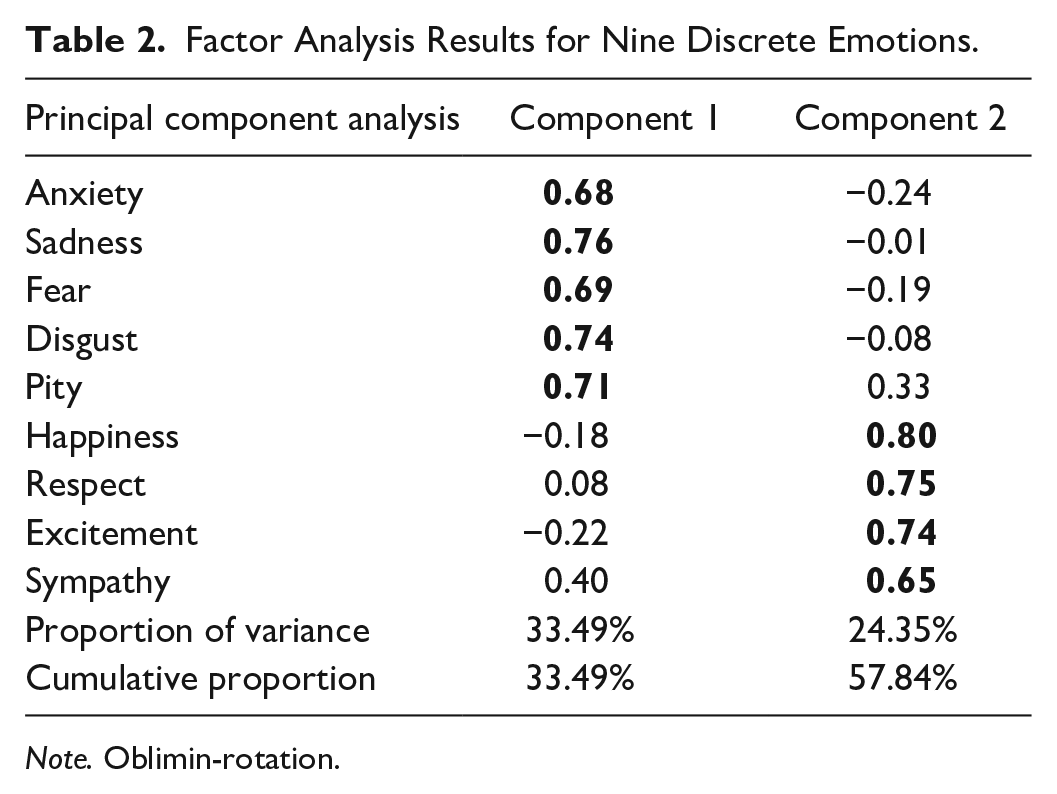
Note. Oblimin-rotation.
The main analysis is the Bayesian multilevel model described earlier, with negative emotions and positive emotions as fixed effects, and willingness to interact with robots as the outcome. Diagnostic checks (Muth et al., 2018) found that R-hat never exceeded 1.01, indicating satisfactory convergence. There were no divergent transitions, the Monte Carlo standard error (MCSE) was small relative to the posterior standard deviations, and effective posterior sample size had a mean of 3,395 and was greater than 940 for all parameters of interest. Results are shown in Table 3. Negative emotions related to willingness to interact (b = −.21, 95% CI = [−0.28, −0.12]), as did positive emotions (b = .36, CI = [0.29, 0.42]). Both posterior credible intervals excluded 0.
Multilevel Regression Investigating Positive and Negative Emotions as Predictors of Willingness to Interact With Robots.
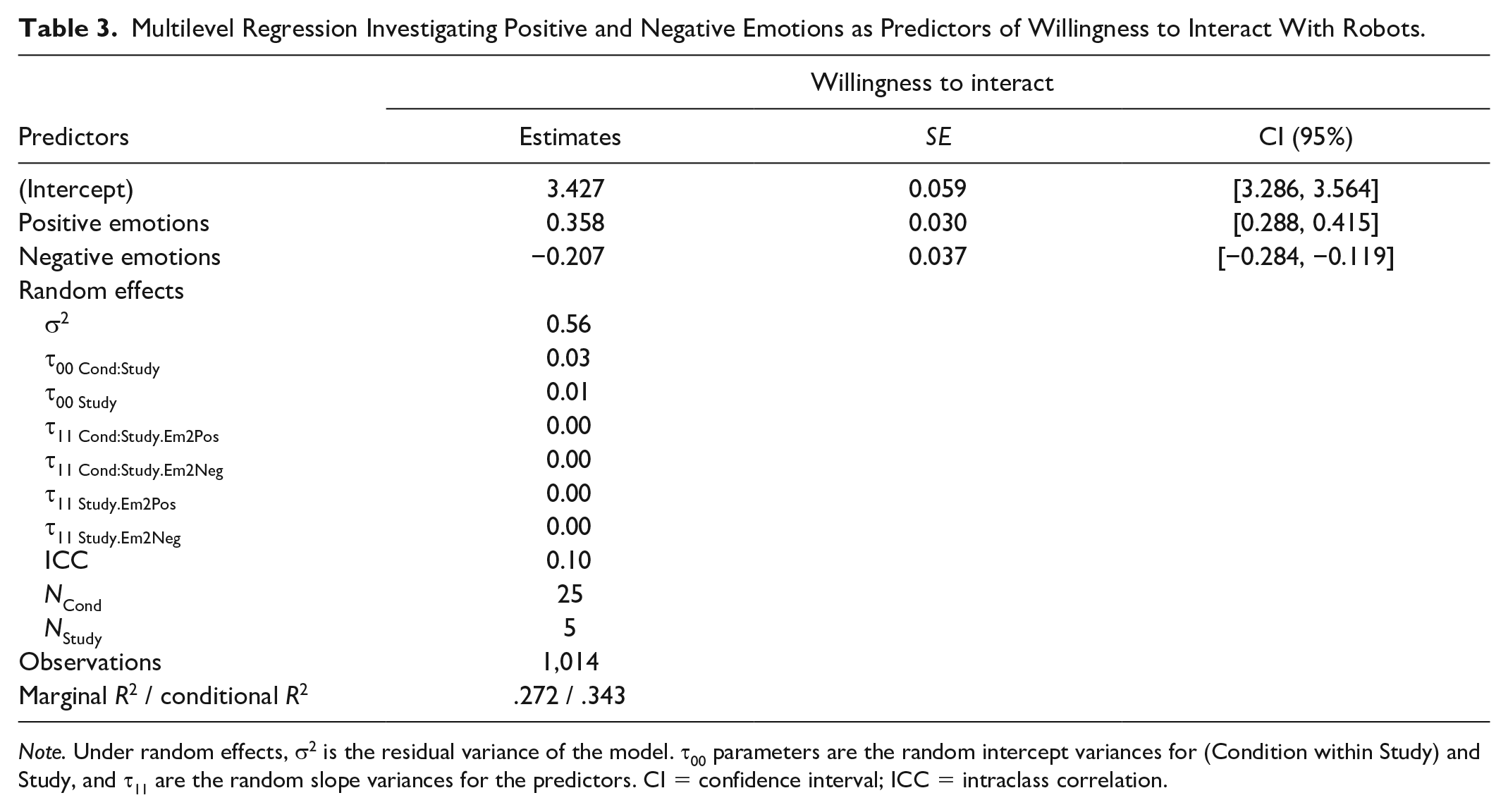
Note. Under random effects, σ2 is the residual variance of the model. τ00 parameters are the random intercept variances for (Condition within Study) and Study, and τ11 are the random slope variances for the predictors. CI = confidence interval; ICC = intraclass correlation.
The coefficient for positive emotion (0.36) is larger in absolute value than the coefficient for negative emotion (−0.21). To formally test the difference, we used the posterior distribution from the model estimation process. Each step includes estimates of all model parameters including the coefficients for positive and negative emotions. For each of the 4,000 steps, we computed the difference between the absolute value of the positive coefficient and the absolute value of the negative coefficient, for example, |0.36| −|−0.21|. Finally, we examined the distribution of these differences. They are positive in 3,986 cases (99.6%). Their median is 0.151 and the 95% posterior interval is [0.050, 0.254], indicating that the coefficient for positive emotions is consistently larger in absolute value than the coefficient for negative emotions. An increase of 1 scale point in positive emotions is associated with a larger increase in willingness to interact, compared with a decrease of 1 scale point in negative emotions. 1
Positive, negative, and anxious emotions
Next, we wished to distinguish fear and anxiety from other negative emotions, consistent with theory and evidence that threat or fear-inducing stimuli are processed in different ways than other negative stimuli (e.g., LeDoux, 2012; March et al., 2017; Öhman & Mineka, 2001). Thus we created composite scores for three factors: negativity (disgust, sadness, pity), anxiety (anxiety, fear), and positive emotions (excitement, happiness, sympathy, respect) by averaging unstandardized emotion item scores. Reliabilities were .71, .78, and .72, respectively. The scale means were 1.91 (95% CI = [1.85, 1.97]) for negative, 2.85 (95% CI = [2.75, 2.95]) for anxiety, and 3.89 (95% CI = [3.81, 3.97]) for positive; positive emotions were reported with much greater intensity than either measure of negative emotions.
We ran the Bayesian multilevel model with negative emotions, anxious emotions, and positive emotions as fixed effects, and behavioral willingness to interact with robots as the outcome. As this model has more parameters, a total of 8,000 steps was used to attain an adequate effective sample size. Diagnostic checks found that R-hat never exceeded 1.01, indicating satisfactory convergence, and there were no divergent transitions. The MCSE was small relative to the posterior standard deviations, and effective posterior sample size had a mean of 6,783 and was greater than 1,390 for all parameters of interest. Results are in Table 4. anxious emotions (b = −.09, 95% CI = [−0.15, −0.02]), other negative emotions (b = −.11, 95% CI = [−0.19, −0.04]), and positive emotions (b = 0.36, 95% CI = [0.29, 0.42]) were all significantly related to willingness to interact.
Multilevel Regression Investigating Positive Emotions, Other Negative Emotions, and Anxious Emotions as Predictors of Willingness to Interact With Robots.
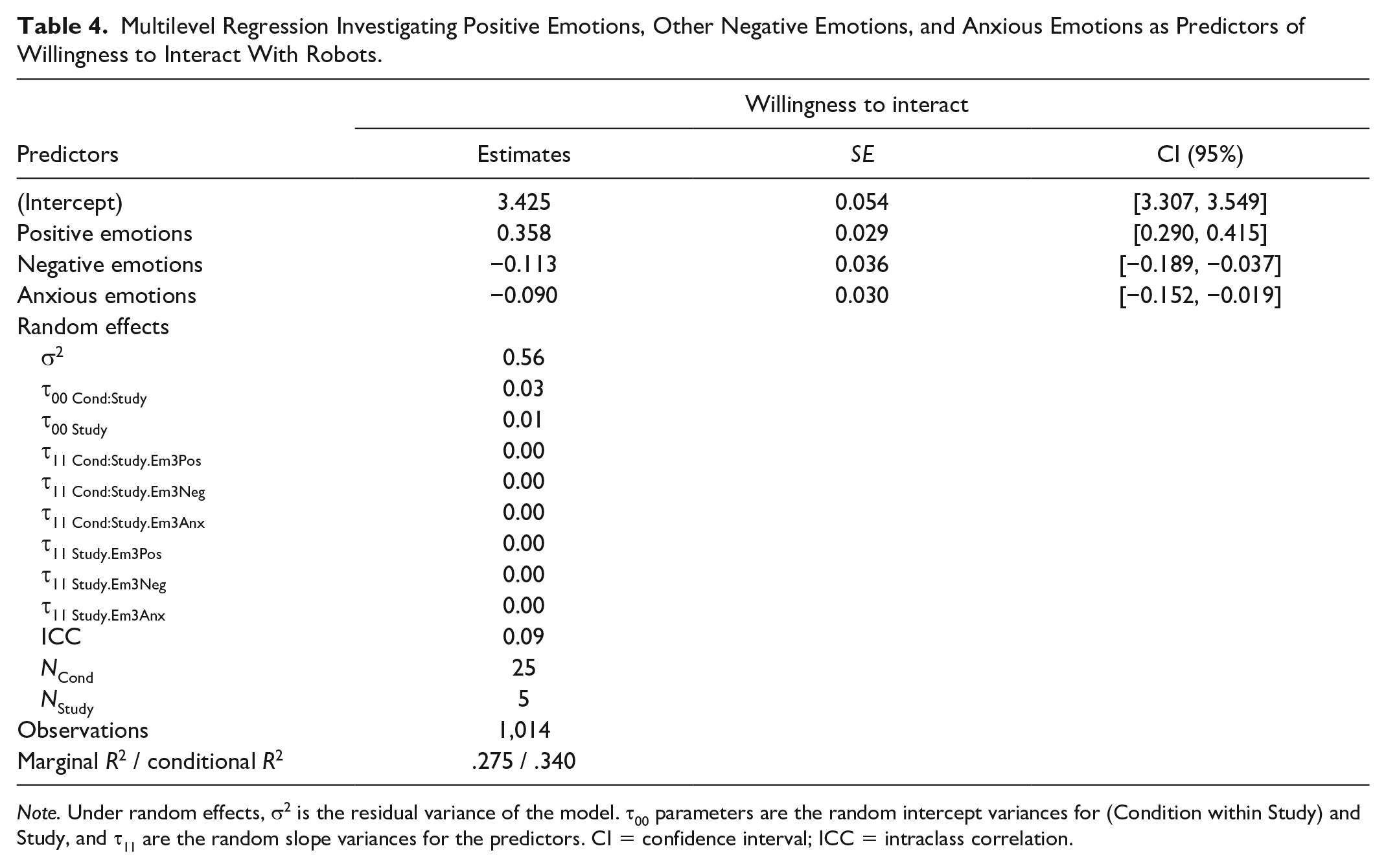
Note. Under random effects, σ2 is the residual variance of the model. τ00 parameters are the random intercept variances for (Condition within Study) and Study, and τ11 are the random slope variances for the predictors. CI = confidence interval; ICC = intraclass correlation.
Using the posterior distribution, we tested as above whether the coefficient for positive emotions was greater in absolute value than those for anxious and negative emotions. For negative emotions the difference is positive in 7,998/8,000 cases (99.9%). Its median is 0.24, and the 95% posterior interval is [0.15, 0.33]. For anxious emotions, the difference is always positive, has a median of 0.27, and the 95% posterior interval is [0.18, 0.36]. Thus, positive emotions consistently relate more strongly to willingness to interact than either negative or anxious emotions. 2
Specific emotions
Finally, we investigated the variance explained by the nine specific emotions, rather than groups of emotions. Again, diagnostic checks did not reveal any problems with the model convergence or estimates. Results of our analysis (Table 5 and Figure 4) indicate that two positive emotions—excitement (b = .186, 95% CI = [0.137, 0.235]) and happiness (b = .072, 95% CI = [0.019, 0.124])—had posterior intervals that excluded 0. Two negative emotions, fear (b = −.056, 95% CI = [−0.107, −0.005]) and disgust (b = −.100, 95% CI = [−0.160, −0.040]), had negative coefficients and intervals that excluded 0.
Multilevel Regression Investigating Nine Specific Emotions as Predictors of Willingness to Interact With Robots.
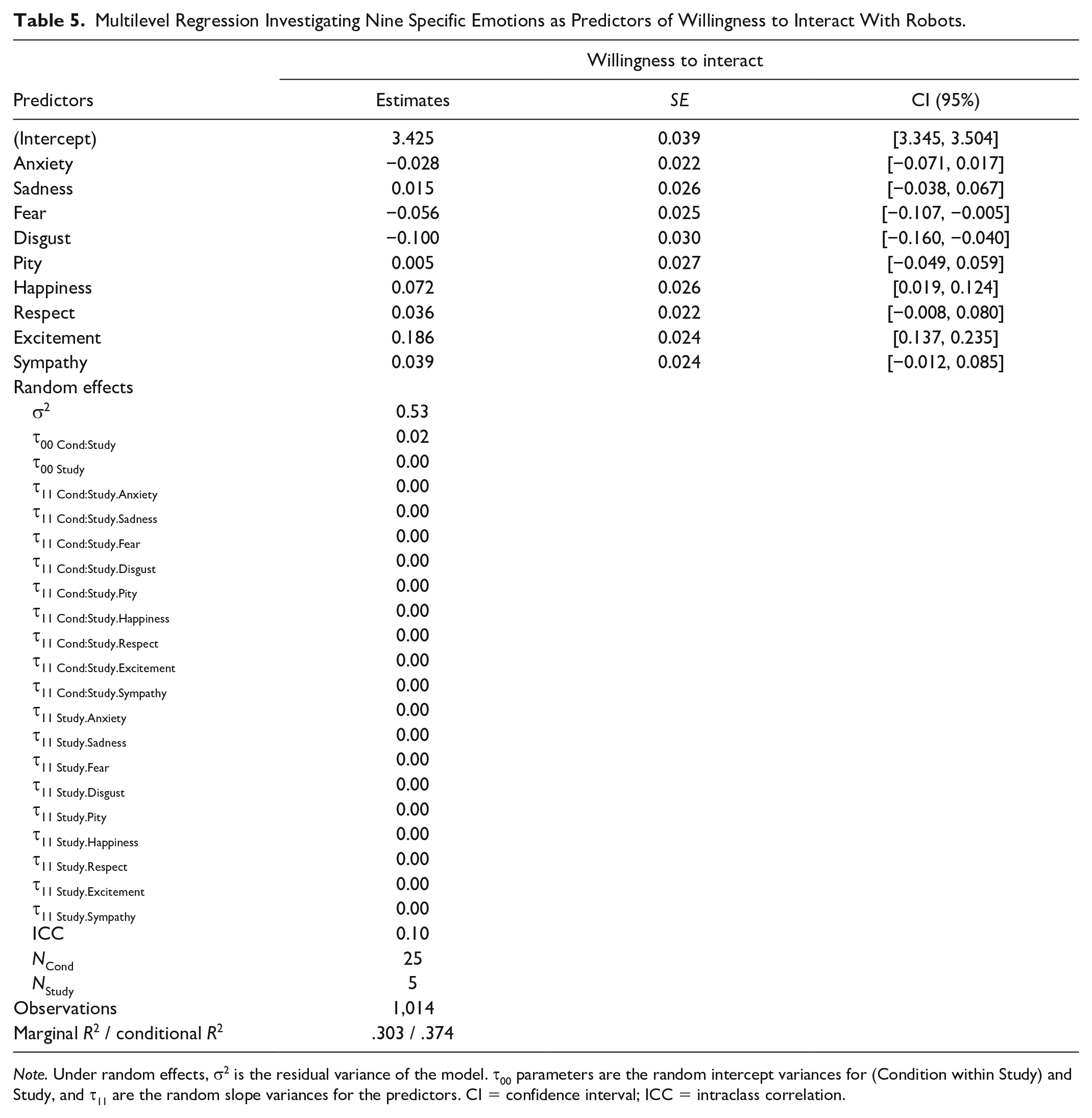
Note. Under random effects, σ2 is the residual variance of the model. τ00 parameters are the random intercept variances for (Condition within Study) and Study, and τ11 are the random slope variances for the predictors. CI = confidence interval; ICC = intraclass correlation.

Plot of estimates of regression coefficients for nine emotions.
Like the previous analyses using scales of positive emotions and negative emotions, these results demonstrate that specific positive as well as negative emotions contribute to people’s willingness to interact with robots.
General Discussion
The general issue addressed in this article is how willingness to interact with robots is affected by negative emotions (leading to avoidance of or disengagement from intergroup or robot interaction; Plant, 2004) relative to positive emotions (encouraging such interaction). Our findings on HRI show that positive emotion accounts for more variance. Emotions such as happiness and excitement draw people toward interaction with robots, in anticipation of the benefits they may gain from it. As previously described, there are comparable results showing the importance of positive emotions with human out-groups. For example, respect or admiration for the out-group is the key mediator of the effect of past intergroup contact on prejudice for racial groups in the United States (Seger et al., 2017).
Negative emotions are associated with lower levels of willingness to interact with robots, whether all negative emotions are combined into a single scale or fear/anxiety are separated from other negative emotions (in which case both negative scales have similar coefficients). However, the effects of positive emotion are stronger than those of negative emotions, in the sense that an increase of 1 scale unit in rated positive emotions is associated with a greater increment in willingness, compared with a 1-unit decrease in rated negative emotions. In addition, and orthogonal to our main question about prediction of willingness, the means show that positive emotions are reported more strongly than negative or anxious emotions.
In the analysis examining the nine specific emotions, happiness and excitement are the positive emotions that independently account for significant variance (with excitement having the larger coefficient). This finding relates conceptually to Aron’s model of “self-expansion” (Aron & Aron, 1997), the idea that encountering or forming a relationship with another generates positive feelings—specifically of excitement—due to inclusion of the other in the self (Reissman et al., 1993). The applicability of the self-expansion model to HRI—where excitement might be enhanced by the novelty of the experience—has not yet been examined, but represents an interesting direction for future research.
Negative emotions of disgust and fear also significantly relate to willingness to interact, differing somewhat from findings that anger and anxiety are important negative emotions in human intergroup interaction (e.g., Plant et al., 2008). Further research comparing human interracial interaction and HRI in the same paradigm will be required to establish whether the difference in relevant emotions depends on the nature of the out-group. Although the fact that fear reduces willingness to interact with robots may be obvious, disgust is less clearly relevant. However, disgust is implicated in the “uncanny valley” or the dislike people sometimes feel toward robots that are almost but not quite humanlike (Mori et al., 2012; Wang et al., 2015). Ho et al. (2008) found that ratings of disgust toward a robot were associated with feelings of eeriness and creepiness related to the uncanny valley effect, and individual levels of disgust sensitivity are correlated with sensitivity to the uncanny valley (MacDorman & Entezari, 2015). Reviewing this literature, Broadbent (2017) comments “ratings of unease toward not-quite-humanlike robots may be explained by evolutionary theory because it could be beneficial to feel revulsion as a defense mechanism to protect against infection from diseased or deceased bodies,” clearly referencing the functionality of disgust.
Methodologically, these studies highlight the need for researchers to measure and analyze multiple emotions, both positive and negative. Because emotions are typically correlated (Figure 2), analyses of just one or two emotions may support misleading conclusions. Our studies also use a Bayesian multilevel analytic approach, with the 25 conditions nested within studies included as a random factor. These analyses show that our conclusions regarding the effects of the emotion predictors hold across studies and conditions despite different scale wordings, different types of robot, different participant populations, and live versus video forms of participant interaction. The use of participants as a random factor in all types of standard analyses, when effects are statistically significant, allows the generalization of those effects beyond the specific participants in the study to other “generally similar” participants. Similarly, the use of studies and conditions as random factors licenses generalization beyond these specific conditions to a broader population of potential types of HRI (Judd et al., 2017).
Limitations
Our analysis does have limitations. One is that we measured self-reported willingness to interact with robots, not participants’ actual behavior. However, our method has important advantages, such as measuring willingness in a variety of situations that could not be practically or ethically reproduced in the lab. Another limitation is that we do not have measures of potential mediators of emotion effects on willingness to interact. For example, the Almere model (Heerink et al., 2008) postulates that anxiety reduces perceived ease of use of a robot, which in turn has negative effects on intentions or willingness to use. However, the causal ordering assumed in this model might be questioned; it appears equally plausible that low perceived ease of use is one cause of anxiety when contemplating interacting with a robot.
Finally, these analyses are correlational in nature. However, existing experimental research shows that emotions cause willingness to interact and related constructs. Esses and Dovidio (2002) manipulated instructions for White participants to focus on their thoughts or feelings while viewing a video about anti-Black discrimination. A feelings focus produced more positive emotions as well as increased willingness to engage in contact with Blacks. Other experimental studies demonstrate that training or instructions to regulate emotions produce more favorable attitudes or behaviors toward an out-group, even in the intense Israeli-Palestinian conflict (Burns et al., 2008; Halperin, 2013; Halperin et al., 2013, 2014). These and other experimental studies make it plausible that emotions are among the causes of willingness to engage in intergroup interaction.
Theoretical Implications
The major conclusion from this work is the general finding that positive emotions account for more variance than negative or anxiety-related emotions in willingness to interact with robots. This suggests that person-to-person variation in the extent of positive responses such as excitement is a more important factor than variation in negative feelings such as anxiety. Our Bayesian multilevel analysis shows that these effects hold across variation between studies and conditions in participant populations, types of robots used, live or video interaction, and many other factors. This pattern suggests that there may be some robustness and generality to these effects.
At the broadest level, this work demonstrates benefits of conceptualizing HRI as an instance of intergroup interaction. This not only allows the application of well-developed social psychological theories to help understand HRI but also challenges and strengthens intergroup theories by stretching them to different contexts from those for which they were developed. In future research, studies should be conducted on effects of positive and negative emotions on willingness to engage in human intergroup interaction, for which similar patterns of findings might be expected. Surprisingly, as far as we are aware, no such studies have been conducted (although Barlow et al., 2019, examined a related issue, effects of past contact on one positive and one negative emotion).
Practical Implications
For those interested in increasing people’s willingness to interact with robots—in schoolrooms, nursing homes, or factories—our results may have significant implications. If people resist interacting with robots, an intuitive approach might suggest interventions aimed at alleviating their negative emotions (especially anxiety). Our results suggest that such an approach might be less effective than interventions to increase the level of positive emotions (e.g., excitement). If our results hold true, a given amount of increase in positive emotions will have a larger effect in altering willingness to interact, compared with the same amount of decrease in negative emotions. Especially for individuals with little or no experience in HRI, encouraging excitement about such interaction could be an effective strategy. As interactions unfold over time, emotional responses might change: Disgust and “creepiness” from the uncanny valley effect may diminish (Zlotowski et al., 2015), and the excitement arising from novelty may wear off. At that point, other positive emotions such as happiness, respect, or sympathy might begin to play a more important role.
Concluding Comment
Emotions, whether positive or negative, play a crucial role in encouraging or discouraging people from engaging in intergroup interaction, which can bring many personal and societal benefits (Hodson et al., 2018). Examining these effects in HRI, we find that the impetus toward such interaction produced by positive emotions such as excitement outweighs the desire to avoid them due to negative feelings. This pattern suggests that the causes and effects of positive emotions in all types of intergroup interaction, between human groups or with robots, warrant increased research attention (cf. Pettigrew, 1998; Seger et al., 2017).
Supplemental Material
PSPB900439_Smith_Online_Appendix – Supplemental material for Positive Emotions, More Than Anxiety or Other Negative Emotions, Predict Willingness to Interact With Robots
Supplemental material, PSPB900439_Smith_Online_Appendix for Positive Emotions, More Than Anxiety or Other Negative Emotions, Predict Willingness to Interact With Robots by Eliot R. Smith, Steven Sherrin, Marlena R. Fraune and Selma Šabanović in Personality and Social Psychology Bulletin
Footnotes
Acknowledgements
We thank Kyrie Jig Amon and Jennifer LaCosse, as well as the many research assistants who helped collect the data in the studies that are reanalyzed here.
Authors’ Note
Marlena R. Fraune is now at Department of Psychology, New Mexico State University, and Steven Sherrin is now at Wentworth Institute of Technology.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Science Foundation under Grant CHS-1617611.
Supplemental Material
Supplemental material is available online with this article.
Notes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.