
Abstract
Attempting to establish aids for individuals who are visually impaired has urged many cities to seek solutions for improving their quality of life. Namely, cities have installed sound-emitting devices into traffic lights as well as sidewalks that assist their navigation. Moreover, as cities are always striving to move forward and achieve innovations concerning navigation for disabled individuals, smart traffic lights, capable of synchronizing in real-time according to traffic and individual mobility conditions, are already being installed around the world. This is in line with the adoption of the smart city concept, which involves a set of methodologies and indicators that regulate how cities perform regarding the promotion of citizens’ quality of life. Another important principle is the techno-economic aspect indicating the need for low-cost careful planning to produce cost-efficient solutions, while additional important issues are maintenance, power efficiency, and the means to coordinate numerous devices to facilitate operation in a timely and reliable manner. In this article, we present an overview of the existing solutions for the navigation of people who are blind and visually impaired along with a requirement analysis performed on the feedback received from interviews with members of the Lighthouse for the Blind of Greece both of which lead to the proposal of a new implementation that pushes the state of the art.
Keywords
Introduction
The issue of developing assistive technologies for the navigation of people that are blind and visually Impaired (BVIs) has attracted the interest of a plethora of cities worldwide (ISO, 2014). According to Yeon Lee and Mesfin (2020), legal blindness refers to the USA’s Social Security Administration, which considers an individual legally blind when they have a central visual acuity of 20/200 or worse. According to the same source, the World Health Organization (WHO, 2020) provided data indicating that 2.2 billion people have a near or distance vision impairment globally, out of which 1 billion people are those with moderate or severe distance vision impairment or blindness. Most people who suffer from visual impairment or blindness are older than the age of 50; however, vision loss can afflict people of any age. The likelihood of more individuals experiencing visual impairment is predicted to rise as the population grows and ages. In addition, due to geographical inequalities, the prevalence of distances for vision impairment is predicted to be 4 times greater in low- and middle-income countries than in high-income ones. Notably, a total of 90% of blind individuals live in developing countries. These data also indicate that for each blind person worldwide, there are 3.4 individuals with low vision, with a country and regional variation between 2.4 and 5.5 individuals.
Chan et al. (2018) stated that visual impairment and blindness mainly affect the elderly individuals in the United States. Wolfram et al. (2019) state that in Germany the number of elderly people will rise dramatically, increasing age-related ocular diseases, and this will result in a higher number of people with vision loss. The prolonged life expectancies are likely to escalate the prevalence of visual impairment, according to Naipal and Rampersad (2018). Moreover, they define visual impairment as reduced visual performance that can be remedied neither by surgery nor medication.
Habib and Irshad (2018) stated that the adolescent population of visually impaired individuals experience a low quality of life in terms of physical and psychological health and well-being as well as social relations and the environment. According to Khorrami-Nejad et al. (2016), quality of life could be improved by providing education, employment, and expanding social programs for BVI individuals. Moreover, Wang et al. (2017) depicted in their research that there is a strong association between global variations in vision loss and socioeconomic factors at a national level.
Chan et al., 2018 attempted to estimate the prevalence of visually impaired and blind individuals in the United States between 2017 and 2050 and projected an increased rate of vision loss from age-related causes; moreover, 480,000 new cases each year of mild low vision, 180,000 cases of moderately low vision, and 134,000 legally blind cases have been estimated.
Detecting and recognizing pedestrian traffic lights is obligatory when crossing roads. The latter is of paramount importance because they are critical parts of an urban landscape, and they consist of safety issues, especially for people with blindness and visual impairments. Independent mobility and specifically crossing a road at a traffic light is a challenge for these people. Based on the aforementioned, it seems that the use of traffic lights concerns a large portion of the citizens in each city. Indeed, smart traffic lights can help individuals with vision and hearing disorders as well as the elderly individuals have a smooth and safe passage on a road (Coughlan & Shen, 2013). Το date, a wide variety of technologies have been developed to assist individuals with visual impairments in walking and crossing the roads. Conclusively, a smart traffic light system would also promote the quality of life of individuals who are visually impaired and who, according to Högner (2015), need special programs that would help with the reduction of traffic hazards.
In this article, we present an overview of the works found in the literature along with the requirements analysis after the conduction of participatory work with users and proposed initial implementation. The remainder of the article is organized as follows: The second section provides background information concerning the history and the evolution of the traffic lights and existing implementations and methods utilized in the literature, while the third section presents the materials and methods used in the context of our proposed system. The initial and intermediate results, the requirements of our implementation along with the participatory work of interviewees through their requirements classification, are discussed in the fourth section. The fifth section concludes the article. Finally, in Appendix A, there is a table comparing tools, methods, features, restrictions, and evaluation with metrics from the papers of the literature.
Related work – history of traffic lights worldwide and their evolution until today
Traffic lights have changed and evolved greatly since they were first implemented in 1912 in Cleveland, Ohio, by Lester Wire (Palsa et al., 2019). Back then, they were only red and green and would be operated by a policeman in a nearby booth. Later, with the advent of computers in the 1960s, traffic lights would become automated, and automation was implemented with great success. As humanity evolved so did technology, and wireless technologies have since been applied to traffic lights. An example is Vehicular Ad Hoc Networks which are used for communication purposes among vehicles. These techniques cannot be directly used to guide people with visual impairments because they are specifically optimized for circular or elliptical lights, while pedestrian traffic lights have different shapes (Chiang et al., 2011; Habib & Irshad, 2018; Sooksatra & Kondo, 2014). On the other hand, other solutions that are designed for smart vehicles but are not specialized for circular or elliptical traffic lights can be useful in identifying pedestrian traffic lights.
Independent mobility and specifically crossing a road at a traffic light is a challenge for people with visual impairments. Some solutions involve sound. Many different models and variations in acoustic traffic lights are in use. Especially, systems that generate sounds signaling the duration of the work interval and others that provide talking messages have been developed and used in several cities. In Italy, people with visual impairments push a button that makes a sound when the light is green for pedestrians, whereas, in Germany, a sound always plays for pedestrians when the light is green. In both developing and underdeveloped countries, the majority of pedestrian traffic lights lack sound aids. Unfortunately, in many countries either not all lights have either of these facilities, and even where they do, they are not always working. The route guidance devices that exist offer mapping directions but struggle to fix critical safety concerns such as when to cross at an intersection, which necessitates knowledge of the position of traffic signals and moving objects such as vehicles.
According to Chen-Fu (2012), both individuals that are BVI heavily rely on walking for transit; for that reason, the United States has passed the American with Disabilities Act (ADA), which enabled the establishment of accessible pedestrian signal (APS) systems; they are described as sound cues that are installed in the traffic light systems, allowing the visually impaired to know when it is safe to cross a road. This type of traffic light could be perceived as a ‘smart traffic light.’ Chen-Fu (2012) also states that, with the advent of smartphones, an app could prove helpful for the guidance of people with visual impairments and at the same time be readily accessible.
Existing implementations for smart traffic lights for people that are BVIs
Cloud-based technology could allow for the promotion of a safer transit experience for people with visual impairments. According to Angin et al. (2010), the timeliness of reactions and precision are the two most important aspects of the challenge of traffic light detection. The latter developed traffic lights detector as an initial component of a two-tier architecture context-aware navigation system which are ‘Mobile Navigation and Awareness Server’ (mNAS) (any smartphone device in the market) and the ‘Cloud Navigation and Awareness Server’ (cNAS). Ihejimba and Wenkstern (2020) proposed a solution, DetectSignal, that provides high-speed and low-latency traffic signal notification, both for individuals with visual impairments. Wearables are potentially helpful in this context; Huang et al. (2017) developed a wearable device that would provide an improved transit experience to visually impaired individuals, compared to traffic light buzzers. Cheng et al. (2018) suggested the use of RGB-Depth images obtained also by a wearable device in the intersection navigation. Furthermore, with the use of various detectors, people with visual impairments would have the capability to find the starting point of crosswalks, to perceive the status of crossing signals (crossing light signal), and to detect the pedestrians’ walking path and its state.
Cohen and Dalyot (2020) established that the combination of temporal data about the pedestrian traffic flow, generated via machine learning algorithms, and the available data of the OpenStreetMap database can significantly increase the reliability of route planning algorithms for blind pedestrians. Similarly, Manavella (2015) proposed the development of a wearable device that would identify traffic signals and allow people with visual impairments the safe passage through intersection crossings with the use of an algorithm. Color-blind individuals also come across challenges when faced with traffic lights. Mobile phone cameras would also assist the visually impaired. Sharma (2016) suggests that a computer vision-based system for pathfinding and navigation aid could enhance the mobility of visually impaired individuals and provide independent travel.
Mobile devices could also be used to detect traffic lights. People who are blind or visually impaired must acquire accurate and fast object recognition and obstacle detection, which necessitate the use of computationally intensive image and video processing algorithms. Mascetti, Ahmetovic, Gerino, and Bernareggi (2016) and Mascetti, Ahmetovic, Gerino, and Bernareggi, et al. (2016a, 2016b) proposed a reliable method of traffic light recognition using mobile devices and providing unsupervised transit for the visually impaired through image capturing and identification that enables them to gain visible traffic light images in a variety of lighting conditions due to time and weather. Ghilardi et al. (2018) suggested a method for detecting pedestrian traffic lights and computer vision techniques based on deep neural networks and images captured by mobile devices after discovering a significant gap in the literature. Furthermore, Ivanchenko et al. (2010) developed a prototype software application for mobile phones which uses computer vision algorithms to analyze video acquired by the built-in camera and then informs and warns the user in real-time when the Walk light illuminates.
Periša et al. (2015) suggested new service-based research on Near-Field Communication (NFC) and Real-Time Locating Systems (RTLS). Currently available technologies like RFID, Wi-Fi, NFC, and Bluetooth are proposed to find the precise location of people with blindness and visual impairments, which is very useful for their safe movement of the traffic network. Specifically, concerning their crossing traffic intersections, their identification, and informing the traffic intersection management system, the user must have an RTLS tag, which is indicated by an antenna pointed in the direction of the movement of users who are BVI Consequently, the RTLS controller sends details to the traffic light system.
Ahmetovic et al. (2011) with ZebraLocalizer explored the detection and localization of crosswalks using data in real-time from the camera and accelerometers as well as the development of an iPhone prototype application with an interface model tailored to individuals that are visually impaired or blind. Furthermore, Castillo-Cara et al. (2016) implemented a hybrid system based on the use of GPS and Bluetooth 4.0 BLE technologies along with a mobile device that people with blindness and visual impairments may use in indoor/outdoor environments. Concerning outdoor navigation, it is proposed a smart traffic light controller as well as the development of a Google Directions API and Google Maps Geocoding API-based framework.
However, technology is not the only mean that could assist the transit of visually impaired individuals; the design is also important. Oliveira et al. (2015) stated that the classic ‘red on top, yellow in the middle, green at the bottom’ traffic light design must become standardized to allow color-blind individuals a safer transit experience.
Nevertheless, helping those in need is not the only reason why a city should invest in upgrading its traffic light systems. Nguyen-Ly et al. (2019), which handle the case of people that are color-blind, stated that upgrading the traffic light system also saves energy, facilitates the economy by reducing maintenance costs, and its installment would come at a low price as it is achieved with low effort. Moreover, according to the Smarter Cambridge Transport Organization (2019), upgrading to smart traffic lights would reduce congestion, thus reducing time spent driving and, therefore, enabling the regulation of air pollution, prioritizing public transportation, and enabling a better response to traffic incidents. Moreover, the influence of a low efficient conventional traffic system affects the economic, health, financial, and environmental domains, so, it stems from the above that smart traffic lights are an issue of great importance.
Interestingly, there are also other types of smart traffic light implementation proposals found in the literature. Namely, Ortiz-Figueroa et al. (2020) presented an information system for the management of intelligent traffic light infrastructure. Ghazal et al. (2016) proposed a system that would be based on a microchip microcontroller through which traffic density would be assessed using infrared sensors. This would implement dynamic timeslots based on traffic conditions, thus reducing waiting times and allowing for a smoother driving experience. Similarly, Liu and Smith (2015) discuss a traffic system that would prioritize the allocation of green time to the most congested traffic lanes, based on vehicle count and flow, through data that would be accumulated by vehicle presence detectors mounted on intersections.
Almawgani (2018) suggested a smart traffic light controlling system that used an image-processing technique to switch the traffic lights automatically. This research depended on programming and connection between Arduino and MATLAB software to detect and count the number of vehicles. In this way, the estimated time for each lane was calculated to control the traffic light. In addition, Biswal et al. (2020) proposed a different traffic light system based on the popular use of the internet and voice-control technology through which traffic lights could be controlled, using commands such as red, green, yellow, and stop. Further, Moran et al. (2017) proposed a hybrid, city-wide urban navigation system for those who require assistance with transit, by combining GPS technology and vehicle-to-vehicle communication of parked cars, and RFIDs from traffic lights to provide a safe transit experience.
Jawabreh et al. (2020) proposed an upgrade in which traffic lights would be enabled to communicate with each other through the use of an algorithm, wireless communication, and microcontrollers, thus allowing for the assessment of traffic conditions and promoting an optimal traffic management system. Bsharat et al. (2018) proposed a similar means of upgrading traffic lights, as they suggested upgrading the traffic light system with programmable logic controllers, which would count how many cars are waiting at each traffic light, compare the number with other intersections, and allow for the consideration of emergencies. Like the aforementioned studies, Elbehiery et al. (2014) proposed an application that can be used by individuals who are visually impaired and blind to freely and safely navigate city terrain with no assistance. Moreover, Ochoa and Oliva (2018) suggested that cities must be reformed into smart cities and integrate technological means to regulate traffic and promote quality of life. More specifically, they presented a hybrid intelligent application based on bat algorithm and data mining that assists individuals who are color-blind with identifying traffic lights, thus allowing safer driving experiences for these disadvantaged members of the population.
The use of technology is a ‘one-way street’ in the implementation of improved traffic light systems. According to Horijon (2017), developing ‘smart’ cities has become a polarizing debate, as there are four forces that regulate traffic: (a) politics, (b) means of identifying drivers, (c) new means of regulating drivers, and (d) the changes in which both public and private factors govern traffic management. As a result, it is observed that traffic regulation has become data-driven by developing more advanced technological means of observing and governing human traffic. This raises both practical questions, in terms of expenditure and implementation, and privacy concerns, as the principle of privacy has become more challenging in many aspects of everyday life.
Recently, according to Barlow et al. (2003) and Crandall et al. (2001), novel smartphone applications, such as the Mobile Accessible Pedestrian (MAP) Signal system, have also been developed to provide information concerning the intersections to individuals that are blind or visually impaired. In general, this system uses the MAP and SPaT information received by the smart device to orient the pedestrian, assist the user in confirming the exact location, and provide verbal information regarding the signal state. Therefore, this system could improve their ability to cross each street safely. This system is used in many cities in the United States, including New York (‘Mobile accessible pedestrian signal system’, n.d.).
Interestingly, an innovative smart traffic light system has been installed in Thessaloniki, Greece (‘The “smart” contemporary traffic lights’, 2019). It is worth mentioning that these traffic lights do not simply have an audible alarm only for individuals that are BVI and want to cross the sidewalk. Especially, each traffic light has a button at the level of the hand. After pushing the button, the user is informed by the device regarding the exact point where he or she is located in the city. Moreover, the user could understand if the traffic light is green through the vibration it has, as it presents the embossed image of the route. The same device can be connected via Bluetooth to the mobile phone and, therefore, more information can be collected, thus, making it easier to locate passage ( ‘The “smart” contemporary traffic lights’, 2019). Such features seem to be useful and effective for the navigation of people with visual impairment in their city.
The survey of Diaz et al. (2015), which is not oriented only to people that are BVI, organizes various approaches to traffic light detection, thus emphasizing key research fields in computer vision. The review classifies the various works into the following issues: features extraction according to color or shape properties, classifiers, and prior information through digital maps. To the best of our knowledge, this is the first comprehensive review of the available literature on the use and design of smart traffic lights for individuals with visual impairment. In this review, we provide an in-depth analysis of both available traffic lights infrastructure and proposals to improve the existing infrastructure for the benefit of visually impaired individuals. We hope that the information presented in this work regarding the use of smart traffic lights in cities worldwide may help city authorities design new, modern, and efficient systems for the safe navigation of individuals with visual impairment in their cities.
El-Taher et al. (2021) have undertaken a thorough survey on assistive outdoor navigation in which the authors break down the navigation area into a series of navigation phases and tasks, among them pedestrian traffic lights detection and recognition. In addition, they present tables with crosswalk, obstacle avoidance, and pedestrian traffic lights datasets.
Specifications of smart traffic lights, actual applications, and challenges
Smart traffic lights are similar to regular ones with the difference that they employ the latest technological means to provide an improved experience to all involved commuters. The European parliament has filed a motion that acknowledges the need for the inclusion of individuals with disabilities. Namely, it calls nation members to do more for individuals with disabilities. More specifically, the European Commission recognizes that innovative forms of free communication tools for blind individuals, such as accessing information services with special regard to online services, are also essential for them to be able to fully enjoy their rights, including calls for the reduction of barriers to the freedom of movement of people with disabilities, via the adoption of a European Mobility Card, based on mutual recognition by the Member States of disability cards and disability benefits and entitlements to make it easier for people with disabilities to study, work, and travel (Gyselinck et al., 2014). Moreover, annual reports of the European Commission call for increased efforts to achieve individually tailored navigation-based services for the blind and those with serious visual impairments, making specific recommendations while considering dynamic technological development. This would ensure progress is both achieved and continuous, and multimodal door-to-door transport is possible, as set out in the White Paper titled ‘Towards a competitive and resource-efficient transport system’ (European Commission, Directorate-General for Mobility and Transport, 2011). The US government, however, recognizes the sound made by vehicles themselves as an added safety cue for the blind, and therefore, does not endorse specific types of cars (i.e., electric cars with low to zero sound emissions). Moreover, the US government was set to pass the Smart Stop Lights Act (‘Less Traffic with 5 Smart Stop Lights Act of 2017’, 2017), which is based on real-time data from Los Angeles, California, where smart traffic lights have been installed and saw a reduction of travel time by 12% and increased speeds by 16%. In Pittsburgh, Pennsylvania, through the installation of smart traffic lights, there has been a considerable reduction in air pollution because of the reduction of idle stopping of cars (40% reduction) and decreased travel time (26%).
In practice, the government of Barcelona (‘Barcelona Ciutat digital’, n.d.), Spain, guarantees that the city is sufficiently developed to support the needs of all citizens using digital means, including the eradication of social exclusion and the promotion of mobility. Moreover, the installation of new traffic lights is complete with loudspeakers that will assist in the transit of the visually impaired. Advanced Pedestrian Information and Communication Systems are also used at the traffic lights in Tokyo to inform people with visual impairments of the color of traffic signals. Shortly, they use radio communication devices mounted to traffic light poles and they inform them through auditory guidance (‘Smartphone-linked traffic lights helping guide visually impaired in Japan’, 2020).
Nevertheless, the development and use of such systems may present several obstacles that should be overcome and constitute a challenge for the city authorities and the programmers. Especially, the main issue is that the spatiotemporal coverage of traffic information is not enough for optimal control, and the cost for construction and maintenance of such systems is high (Alaidi et al., 2020). Indeed, in such cases, special hardware infrastructure should be installed at each (signalized) intersection to provide information concerning the user’s precise location and the status of signal lights. As a first step, such traffic lights could be placed, if not everywhere, at least in key parts of the city, such as hospitals, universities, public services, and cultural heritage sites, where many people move and cross the adjacent roads. Another solution to limit the energy cost is to easily power the whole system using solar energy, as proposed by Nguyen-Ly et al. (2019). Thus, using a solar energy system the traffic light system would become very compact, economical, and flexible for traffic systems, where motorbikes are used as the main means of transportation, and, therefore, the proposed system could be installed at more intersections according to Nguyen-Ly et al. (2019).
Moreover, synchronizing multiple traffic light systems at adjacent intersections of a city is a complicated issue, as various parameters influence its use and could lead to accidents and traffic jams. A possible solution for this issue, which has been suggested by a previous study, would be the use of a programmable intelligent controller. Specifically, this controller would evaluate the traffic density using IR sensors and accomplish dynamic timing slots with different levels (Ghazal et al., 2016).
Finally, another challenge for the programmers of such systems is the possibility of programming errors. Undoubtedly, complex intersections present the biggest challenge to visually impaired pedestrians and are considered the places where assistive technology is most needed. However, such places present the biggest challenge to computer vision algorithms. Interestingly, to overcome this issue, Coughlan and Shen (2013) have suggested the ‘Crosswatch’ project, which is a smartphone system based on the development of a computer vision program using other information sources, such as geographic information systems (GIS). Indeed, such systems associate data with the respective geographic location and sensor data. Therefore, given the pedestrian’s current location (GPS indicates the accurate location to determine the nearest intersection) and bearing (indicated by the smartphone compass), a GIS can search information associated with that specific intersection, such as the intersection layout (including crosswalk lengths and directions), as well as the presence and location of signs, crosswalks, and signals. Ivanchenko et al. (2008) developed the first camera phone-based system that offered real-time orientation information determined by visual cues at traffic intersections. In the improved version of Ivanchenko et al. (2009), a new computer vision algorithm and 3D analysis to estimate crosswalk location relative to the users who are BVI are introduced. The results of the literature survey are summarized in Table 1 which is provided as an Appendix A at the end of this article.
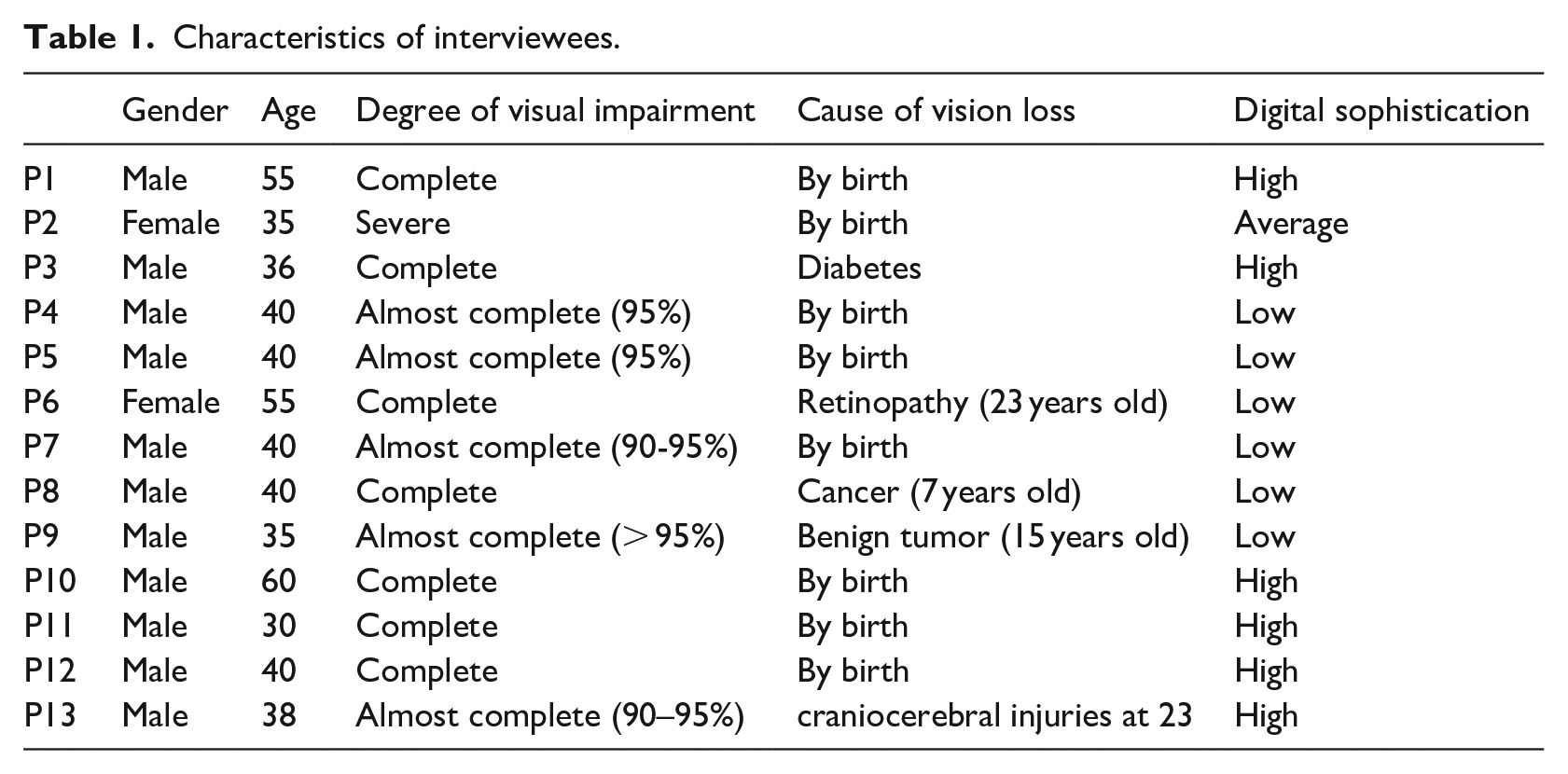
Characteristics of interviewees.
Materials and method
Our research aims to successfully address the daily pedestrian mobility accessibility problems of individuals, who are BVI, contributing decisively to the social inclusion and independence in social and professional life through safer autonomous navigation, as well as training and preparing public and private entities to be autonomously accessible to these users.
The first mobile app of our project (Blind RouteVision) aims to assist people being blind or visually impaired during outdoor pedestrian navigation. The application’s design includes enhanced GPS functionality and interconnectivity with other apps that may be useful during navigation, such as the corresponding service of Google Maps. The app is a part of an assistive navigation system, which includes ultrasound sensors for real-time recognition and avoidance of obstacles along the BVI’s path, synchronization with traffic lights and weather information, and utilization of telematic information of the local Mass Transit System for routes and urban transport stops. The initial version of the Blind RouteVision system is presented in Meliones and Sampson (2018).
The first version is supported on Android smartphones exploiting the Google Maps service to navigate the user using voice instructions. It integrates an external embedded microcontroller, which interfaces with a GPS receiver demonstrating extremely high precision in reporting the user position (see Figure 1) as well as a sophisticated sonar sensor for real-time detection and avoidance of obstacles.

External GPS device.
In addition, it retrieves information about bus timetables and stops in real-time. The app will further integrate a machine learning-based innovative visual information functionality. The first version of the external device (see Figure 2(a)) includes the Atmega 2560 microcontroller and the GPS receiver U-Blox NEO-6M. The second version (see Figure 2(b)) includes the Atmega 328p microcontroller and the GPS receiver U-Blox NEO-8M. The size, consumption, and cost of the device have been reduced, while at the same time, it has a larger memory with optimized management and recognition of the battery level.
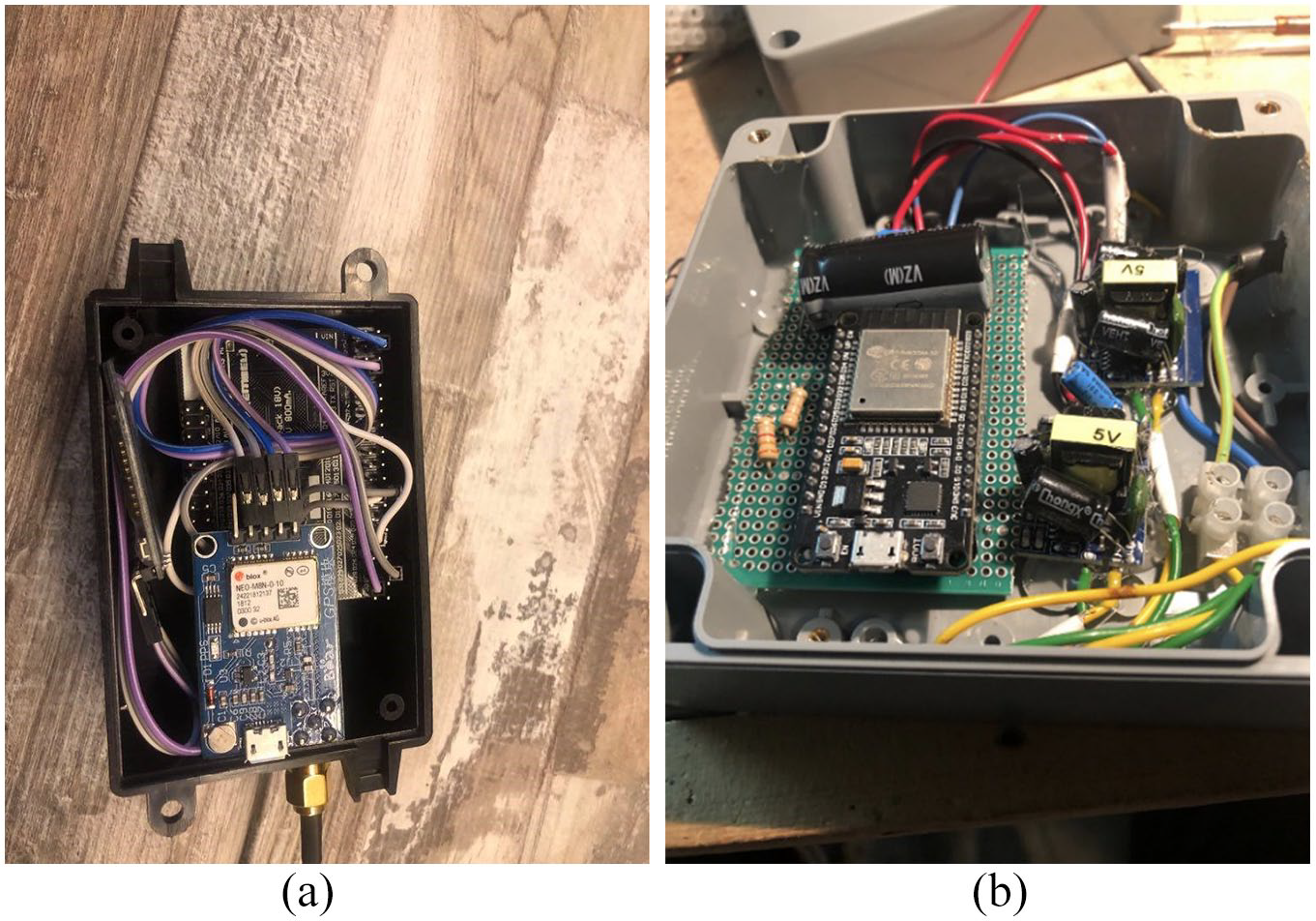
(a) Blind RouteVision outdoor navigation – Advanced Field Navigation Sensor; (b) Traffic light blind crossing device.
The proposed application provides accurate navigation instructions according to the specific requirements of the BVIs with the following features:
Destinations are selected via a voice interface.
Special voice commands for the blind, as opposed to the unsuitable and imprecise voice instructions, for standard navigation applications.
An innovative real-time course tracking and correction mechanism of great precision for people who are BVI
Capability for pedestrian routes to be combined with routes of public transport, incorporating guidance for bus approaches and real-time information for bus stop waiting times
Information regarding traffic light intersections
We propose the implementation of a proof of concept, capable of integrating into any traffic light and informing the blind user when the traffic light turns green and for the time that remains to cross the road until the traffic light changes. In addition, the user is provided with vocal information on how many islets the intersection has and the direction of the vehicles at each intersection. The combination of the application with information on the status of conventional signals is a significant positive result for traffic lights and route monitoring. Moreover, our application equipped with the field sensor of the presented system (Filios & Meliones, 2021a) (see Figure 3) can guide with accuracy people with visual impairments and blindness to cross a traffic lights intersection.

Traffic sensor (the field sensor is the upper box).
Practically, there are three important results of our research for outdoor navigation that are summarized in this section: precise tracking and navigation (Filios & Meliones, 2021b), special voice guidance, and the recognition of the status of the traffic lights signals (see Figure 4). All of these are possible with great guidance accuracy and due to the high tracking accuracy mentioned earlier. In Figure 4, we depict high accuracy and density in finding the user’s location. Furthermore, as can be seen from the picture, the user moves in the line formed by the antennas, while the built-in receiver of the mobile shows him on the left, in a parallel path. The error of the embedded receiver of the mobile is obvious due to the points shown in the image with the mobile phone, in contrast to the many points that are represented with the satellite dish which are the reported points of the external receiver. The average value of the deviation of the GPS of the mobile phone and the external receiver is approximately 10 m. In addition, at the point of interest concerning the traffic light, the deviation reaches 12 m. Approaching the traffic light when the distance is less than 10 m according to the scale, we have reference points mentioned every 2 to 3 m, incorrectly reported position from the receiver of the mobile greater than 10 m, and reported positions from the receiver of the mobile phone at intervals greater than 10 m. The latter shows that our implementation has good guidance accuracy concerning the position, the level, and the available crossing time.

GPS module (represented by the antenna) compared with the phone GPS (represented by the mobile phones) – The real path is the line (row) of antennae.
A usage scenario is presented for the operation of the application regarding traffic lights (Figures 5–10).
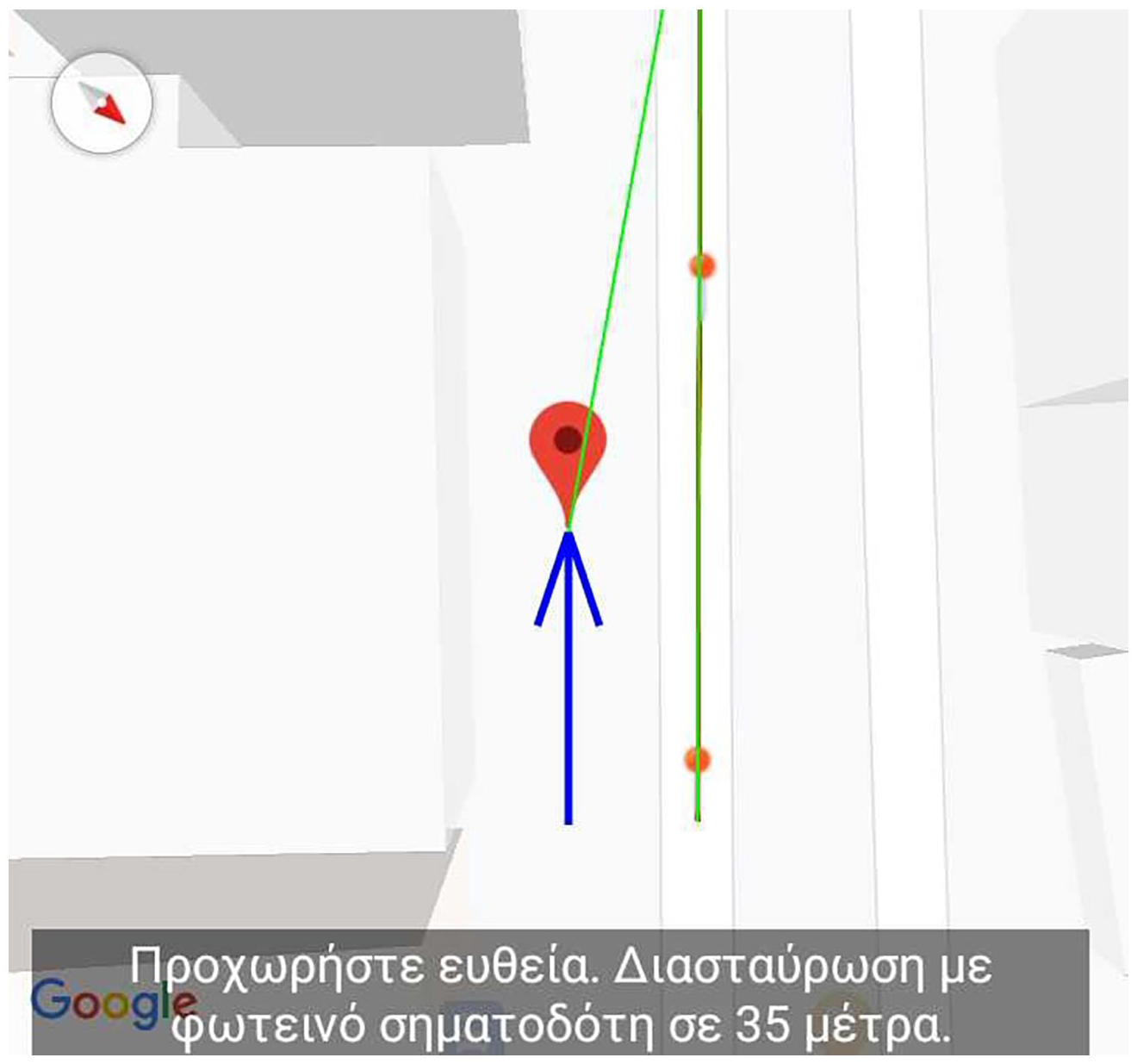
Go straight ahead. Approaching traffic light intersection at 35 m.

Approaching traffic light intersection at 15 m.
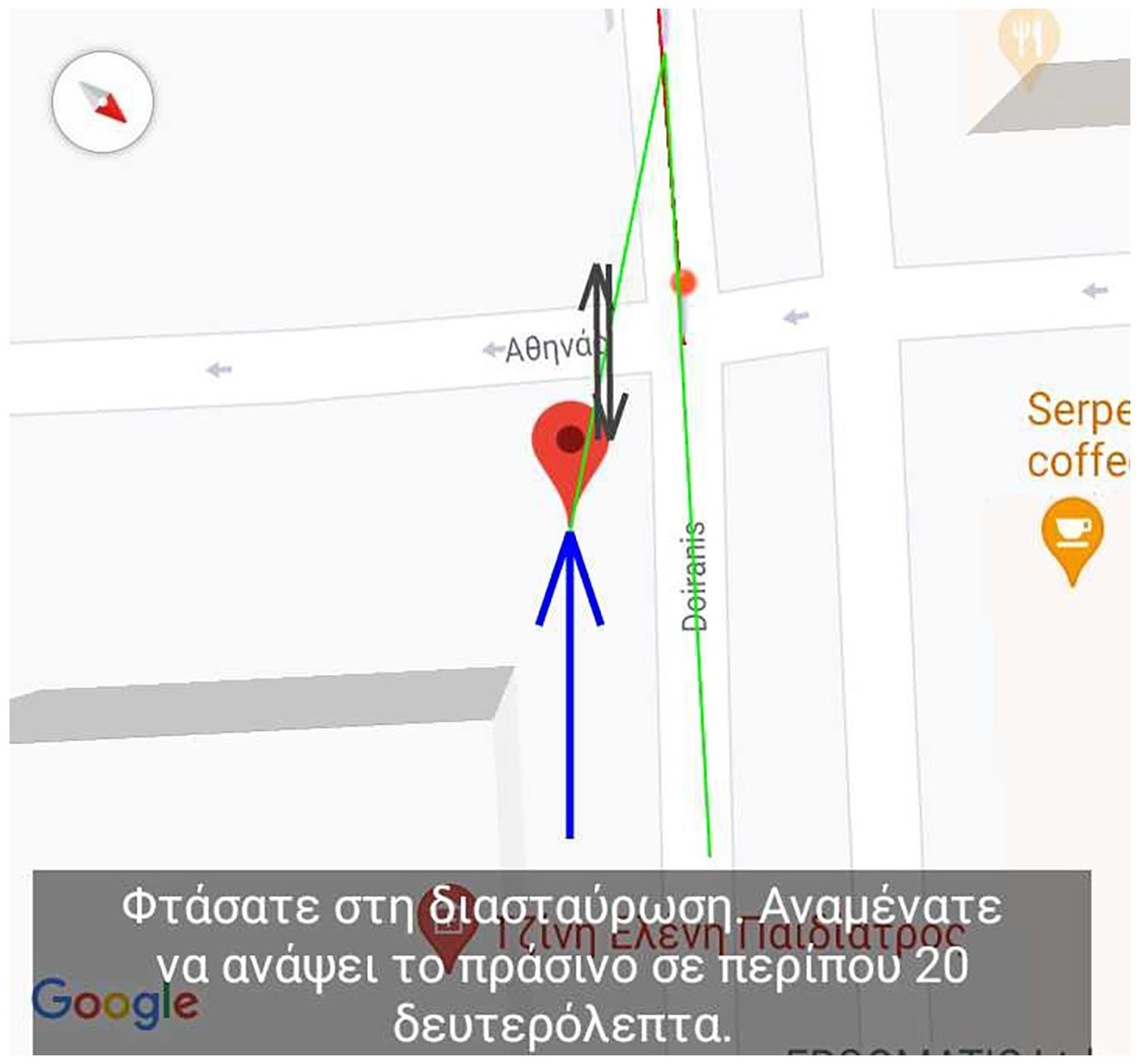
You have reached the intersection. Green will light up in about 20 s.
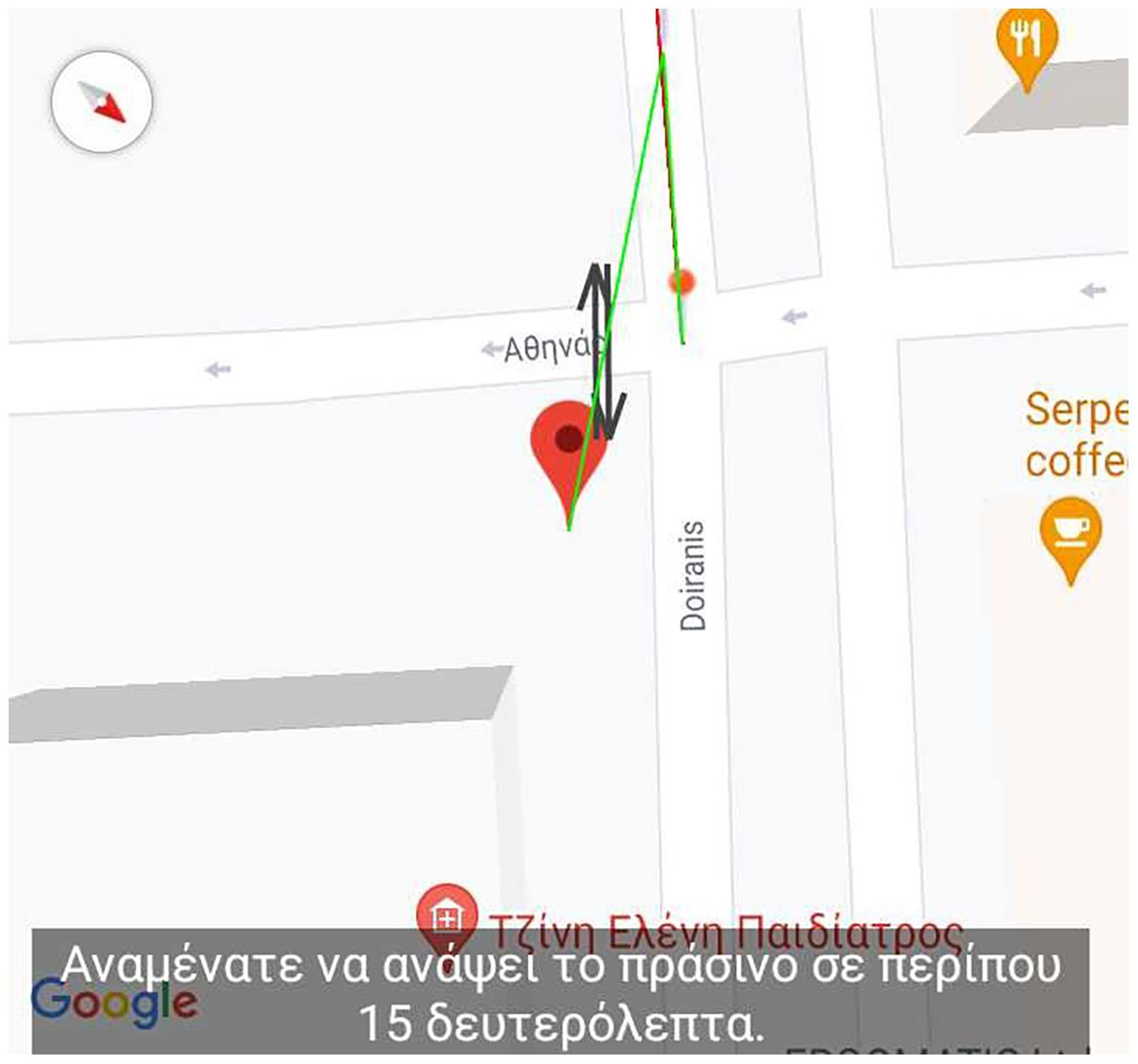
Wait for the green to light up in about 15 s.
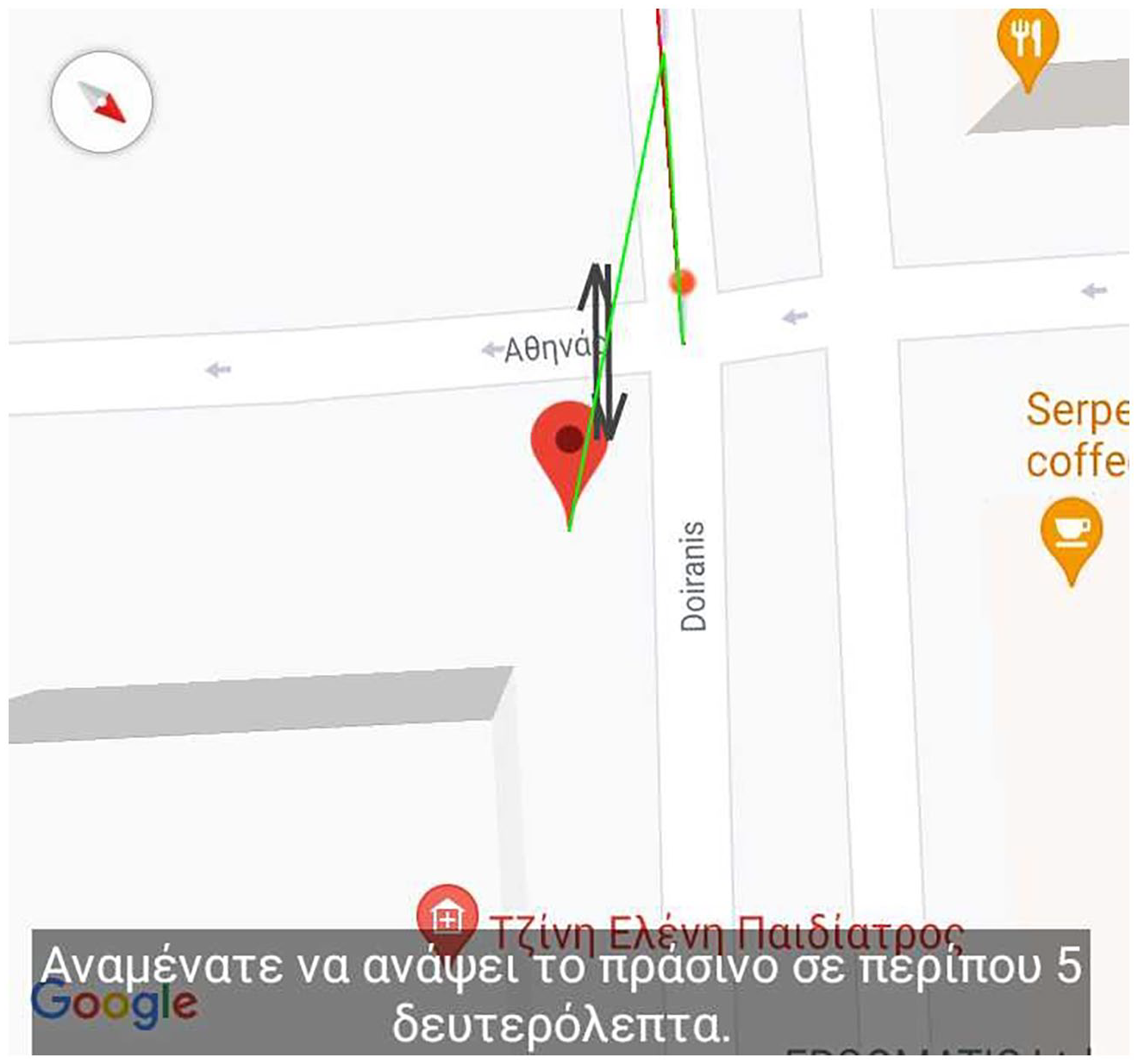
Wait for the green to light up in about 5 s.
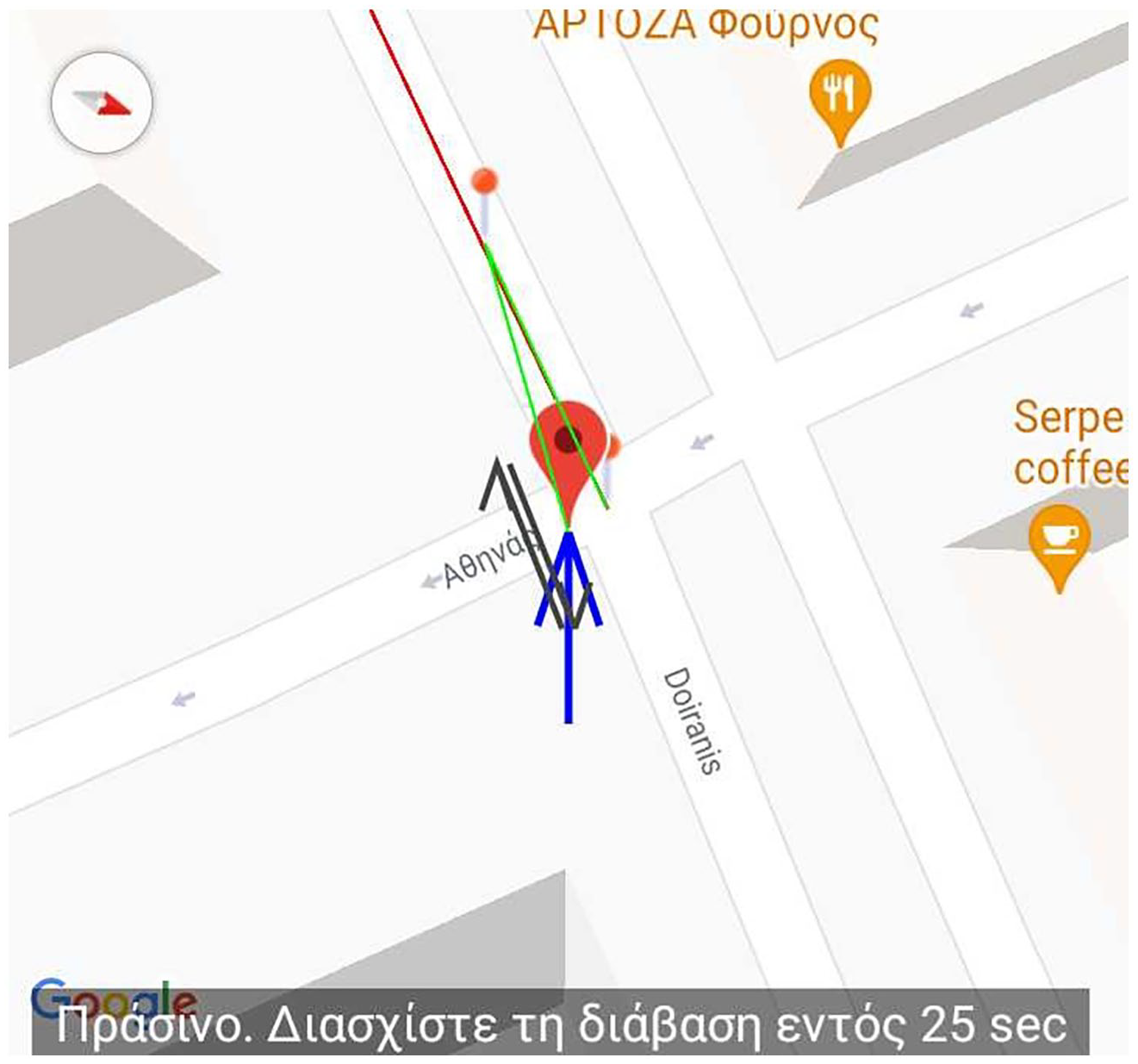
Green. Cross the passage within 25 s.
At this point, it should be emphasized that many of the papers in the related work involve limited efforts for intersection crossing, while our system adopts a holistic approach offering great accuracy and reliability within a comprehensive system for reliable transition and outdoor navigation. To sum up, high-precision routing, real-time route correction, accurate real-time bus stop updates, and traffic light interoperability will create a unified and fulfilled system that is competitive and unique in the market.
Initial, intermediate results, and requirements analysis
During the initial and intermediate phases of the development of the two assistive mobile apps for autonomous navigation of individuals that are BVI, user needs-and-requirements analysis was conducted and refined, respectively. These assistive apps are being developed within the MANTO project (funded by the Greek RTDI State Aid Action RESEARCH-CREATE-INNOVATE of the National Operational Programme Competitiveness, Entrepreneurship and Innovation 2014–2020 in the framework of the T1RCI-00593 contract).
Three phases of the evaluation – general description
In more detail, to accurately identify the problems and preferences, a thorough requirements analysis was conducted by interviewing the members of the community, highlighting the specific characteristics of this group. The questions regarding the applications of navigation assistance concerned both the general use of digital technology by citizens who are blind and the future improvements of the applications’ functionality. To this end, during the final trials of the applications, more interviews will be held on a larger scale through Google Forms. These interviews will seek feedback from both native Greek and international users on how to improve the functionality of applications which will be subsequently, processed utilizing the Social Model of disability (Barnes, 2019) as a guiding philosophy.
The interviews of the initial phase described subsequently were conducted before the prototypes of the applications themselves were displayed to the users. Thus, the participants’ views were not biased by their operational characteristics or appearance. As the respondents were experts in the field and had significant experience in the use of technology working with people with related disabilities, the questions were designed to tap into their knowledge and experience as to what applies to other visually impaired people as well. During the mid-term evaluation phase, users were presented with prototype versions of the applications and were asked whether the requirements they had expressed at the beginning of the interviews were satisfied, which of them had been met and which issues need to be resolved or improved. The responses were then analyzed, and the results were used to improve the third phase of testing.
Interviews with people with BVI
The interviews were conducted at the premises of the Lighthouse for the Blind of Greece, the main nonprofit organization for the education and the assistance of people who are blind or visually impaired in Athens, Greece. The interviewees in the preliminary phase were six male and female individuals with vision problems ranging from complete blindness to severely impaired vision, whereas in the interviews concerning the mid-term phase of the evaluation 13 members participated. Each interview lasted at least 45 min. The table below presents the descriptive characteristics of the interviewees of the middle phase evaluation.
The results of the interviews (answers, suggestions, and comments) identified the following key issues regarding the ease of use and usability of applications by people with blindness or visual impairments. These categories correspond to a broader concept of a requirement elicitation process (Hickey & Davis, 2004). These issues were classified into the following requirements: special characteristics and needs of the people who are BVI, requirements about the usefulness and capabilities of the apps, functionality requirements, usability requirements, requirements about the learning process of the assistive apps and devices, requirements concerning the compatibility and parallel operation of the apps with other apps and services, and other desirable features and general remarks about the assistive apps and devices. These issues were classified into the following requirements:
a. Requirements for special characteristics and needs (perception of the environment, characteristics of the pedestrian navigation)
b. Application requirements (obstacle detection, navigation and capabilities of changing, notification of a trusted person about the exact position of a BVI person),
c. Functionality requirements of applications and devices (keeping external stimuli unobstructed/uninterrupted, complete and seamless voice and audio interaction between BVI individuals and the application, improved placement accuracy),
d. Usability requirements (how the device and the application features will be user-friendly, simple operation, and voice function),
e. Requirements for the learning process (These are many and varied and include the natural environment – places where all aspects of applications can be tested effectively and safely – as well as methods and elements related to teaching and promoting our applications), and
f. Compatibility requirements and parallel operation of these applications with other applications and screen readers.
These categories were further divided into subcategories as presented in Table 2.
Categories of interview responses.

Prior to describing the feedback specific to the traffic lights solution, we briefly outline the main points that were highlighted during the phase of the interviews. In particular, the user requirements concerning the usefulness and capabilities of assistive navigation systems are presented in terms of the direct benefits people with blindness and visual impairments wish to gain by adopting these systems (Theodorou & Meliones, 2021). The need for the detection of multiple, possibly moving obstacles with different shapes and at different vertical positions, was identified along with the requirement for the sonar sensor to notify the blind users at a frequency that is higher than once per second, as stated by one of the three experts. The user also requires a navigation system that could combine pedestrian navigation with the use of other means of transport (providing real-time information for departure or arrival times). During the interviews, the preferences and needs of people with visual impairments concerning the use of means of transport or during pedestrian navigation were also presented (Theodorou & Meliones, 2020, 2021). It can be concluded that people with blindness and visual impairments have a particular need for the most controlled conditions of traveling and that they believe that any deviation from the initially programmed travel may easily result in substantial adverse consequences.
It should be noted that a very important requirement that was mentioned by many interviewees concerns the identification and status of the traffic lights. These interviews guided our team to develop the relevant traffic light system. Subsequently, the evaluation of the traffic lights’ functionality, which intends to help people with serious impairments or even total loss of vision to pass through the crossings with safety, is taking place, as the trials on the field were delayed until an acceptable level of safety was reached. In this case, the trials with blind users in the field started at an advanced stage (close to the final phase) to minimize the associated risk. In total, the focus of the research was on studying, on one hand, the qualitative characteristics derived from the analysis of the users’ needs and preferences and, on the other hand, the quantitative characteristics of user experience via the use of questionnaires in the final phase of the evaluation (Fenton & Bieman, 2014).
Concerning the audio/voice interaction between the user and the apps, the participants highlighted the need for the existence of an audio signal on the traffic lights. In the scenario where both traffic lights and the app produce sound simultaneously, they must be easily distinguishable. Participants also stated that concerning the infrastructure review, malfunctions, or damages to traffic lights or in the means of public transport are not quickly repaired. Therefore, they stated that the maintenance of the software should be frequent, while adequate control systems should report any malfunction in real-time. For such a system to function properly, regular maintenance of the communication systems must be provided. Moreover, appropriate control and information systems or processes should be used to promptly identify any hardware malfunction.
Furthermore, the software should be able to identify possible threats to the individual even when the status of the traffic light is red. In other words, the field sensors' data stream must be continuously processed to guarantee and validate at the same time the safe passing of the blind individual. Safety is a requirement of paramount importance, and its conservation should not be threatened at any point of the route. According to one participant, “when the app notifies the user regarding the status of a traffic light, it should be able to identify the danger that may arise from a driver who does not follow the signal of the traffic light”, as well as “it must be possible to identify the danger at traffic lights even when the application has correctly stated that the blind person should proceed.”
Another remark that stresses the above statement made by most of the participants is the fact that they try to avoid, whenever possible, passages with high volume traffic. To satisfy the requirement of safety, a traffic light system needs to provide the following information, as first presented by Peraković et al. (2013), including information on location, guidance and navigation, objects surrounding the user, traffic intersections, the method of traffic control, traffic light status switching, operability of the system, and successful passage crossing notifications. Another parameter identified by Periša et al. (2015) is user speed that influences the traffic light service for pedestrians who are BVI as it is directly related to the amount of time the traffic light remains on the green phase. Moreover, from our research, we have identified as important parameters the directionality of the vehicles as well as the passing of multiple consecutive cross-sections. As a result, it becomes evident from the above discussion that a large set of parameters needs to be considered to produce usable results.
Discussion and conclusion
After considering the existing literature review and the different use cases of navigation of people with blindness and visual impairments, we decided to approach and focus on the following characteristics–aspects of the accessible traffic lights. The importance of identification of both traffic lights and factors involving the road to be crossed (e.g., incoming vehicles and drivers not obeying the lights) is highlighted. One important aspect for the user who is blind is to know the exact place of the traffic lights by being able to hear and understand the audio alert. Another important aspect is knowledge of the width of the road and therefore how many lanes in which direction and how far it is to cross. In addition, of great importance is an awareness of pedestrians crossing from the other side of the road. It is also worth highlighting that people with blindness or visual impairments need an indication that moving obstacles (other people) are crossing over the road and being alerted to them.
To summarize, we can state that technology should become a part of an organized society when it can improve the quality of life of individuals who are in need and at the same time assist in the maintenance of a clean, safe, and inclusive environment (Chang, 2012). It is projected that the rate of individuals who are visually impaired will rise in the future, and for that reason, appropriate measures must be taken under consideration by governments and decision-makers across the world. Smart traffic lights comprise a very sensible and essential upgrade for the safe navigation of visually impaired individuals, and with the advent of smartphones and mobile devices, they can provide an even further improved experience for those in need of independent transit. However, policymakers must always take serious note that all innovations that involve the accumulation of personal data must be implemented with safeguards that ensure privacy and safety for all.
Finally, in our proposed initiative, the users are informed through the smartphone blind navigation application in real-time about the status of the traffic lights. Real-time updates and monitoring through traffic light sensors are significant positive results for traffic lights and high precision, real-time route monitoring. Regarding this, a patent-pending field sensor, described in Filios et al. (2021a, 2021b), has been proposed by the project team. The users are then informed about the color of the traffic light (red, green), the remaining time to change the current status of the color, the direction of the vehicles, and the number of crossings. The information update can be achieved rapidly with great precision even on the sidewalk toward the walkway. The literature review indicates that a holistic integrated system that connects navigational applications with traffic lights control systems is missing.
Our research with the support of the local authorities contributes to this aspect by proposing a methodology for the necessary data exchange and the cooperation of both systems (accurate navigation and crossing intersection with the aid of smart traffic lights). We offer a variety of possible solutions that span from field solutions which include the installation of external devices on traffic lights and on traffic light hubs, guaranteeing zero latency, to a more centralized one, via the use of the central administration tool of the Attica Region, in an attempt to minimize the costs associated with the field sensors. The latter will be evaluated in terms of the safety issues induced by the additional latency. As a near-future work, we intend to tackle the challenge of verifying in a timely manner the safety of our solution that helps blind individuals cross traffic lights. Toward that direction, the integration of our MANTO project partner Irida Labs visual system will significantly aid our cause. In particular, after the application has detected the status change of the traffic light from red to green light, the visual subsystem can verify that there does not exist a car that violates the traffic light indication. Finally, another aspect worth exploring is the added latency of the proposed system and its implications regarding the near real-time responsiveness in practical scenarios. Given the different degrees of complexity of the real-life scenarios, we can predict that there will be cases where the system’s latency will exceed the desired level of responsiveness. For that reason, we strongly recommend the blind individuals compensate for any transient shortcomings of the application’s functionality by utilizing their strong sense of hearing at all times.
Footnotes
Appendix A
Overview of traffic light technologies aimed at blind and visually impaired individuals.
| Work | Tools and methods | Features | Restrictions | Evaluation–Metrics | Comments |
|---|---|---|---|---|---|
| 1 Ray – Castillo-Cara et al. (2016) | 1. Hybrid BNE4.0/GPS mobile device 2. AVR microcontroller 3. Google Directions API and Maps Geocoding API 4. TextToSpeech Google API |
1. Low cost, complexity and power consumption 2. Robustness, accuracy and timeliness of provided information |
1. Only traffic lights state-provided 2. Requires stable Bluetooth connection 3. High maintenance cost (regular battery replacement in beacons) 4. Use of filters and tuning of parameters, for example, power level |
1. transmission range = 3 m around a traffic light | 1. Two beacon IDs per traffic light for state recognition 2. No information on how the mobile is informed for new entries–IDs |
| 2 ‘n-in-1’ traffic light system – Nguyen-Ly et al. (2019) | 1. Laser and photoresistor sensor combined with Arduino nano 2. ARM microcontroller 3. LEDs display: 84 addressable WS2812B LEDs 4. 28 LEDs to implement countdown timer display |
1. Low cost, power consumption, maintenance costs, easy installation and operation 2. Simpler and significantly more economical compared to camera-based systems 3. effective in case motorbikes are a main means of transportation 4. solar power 5. traffic congestion reduction 6. addressed to color-blind 7. integration of all three traffic signals into a single display block |
1. not addressed to BVIs, but color deficiencies 2. demand active scanning of environment involving continuous physical activity |
1. The minimum average power consumption is 2.00 W | 1. addressed to the motorbike transportation system 2. not addressed to BVIs, only to color-blind |
| 3 DetectSignal – Ihejimba and Wenkstern (2020) | 1. Raspberry Pi 4 (Linux) 2. AWS cloud Server 3. Mobile Device |
1. Cloud-based IoT edge computing solution 2. Reads traffic lights state and synchronizes it with AWS cloud server 3. Tolerance in big numbers of concurrent users 4. Highly available and scalable |
1. High cost of the controller (BOM) 2. High power consumption 3. Cost-effective for users due to their obligatory constant interaction with the server 4. Overall big complexity |
1. On average, response time is 19.20 ms, lowest response time is 10.22 ms, peak response time is 36.05 ms | 1. Low network latency required for real-time exchange of information 2. No information on how state recognition of traffic lights is achieved |
| 4 IoT-based system – Biswal et al. (2020) | 1. Android application 2. Arduino UNO R3 controller 3. voice-controlled smart traffic (VCST) 4. Bluetooth module (HC-05) Light Sensor 5. Temperature and Power Metering Sensors 6. ZigBee Module |
1. energy optimization 2.low-cost, low power, reliable 3. user-friendly smart grid architecture 4. voice commands 5. traffic-flow-based smart (LED) street light |
1. no security issues are referred 2. missing security by advanced authentication schemes 3. short-range coverage (range 100 m) |
1. range 100 m, may be linked through long-distance coverage module | 1. Lack of powerful communication network |
| 5 Mobile-Cloud Collaborative Traffic Lights Detector–Pelin, Bhargava & Helal (++) | 1. context-aware navigation 2. cloud computing infrastructure 3. local navigation capability 4. other contextual data 5. compass integrated into the mobile device |
1. extensible, minimal infrastructural reliance, wide usability 2. access to resources that could provide a lot of contextual clues 3. computational power available through Cloud Computing providers 4. location-specific resources available on the Internet to provide maximal context-awareness 5. easy to use, portable, affordable device 6. compass integrated into the mobile for more accuracy |
1. Requires fast image-processing for locating and detecting the status of traffic lights 2. network latency could create a bottleneck on the timeliness of response received by the user 3. Continuous Internet Connectivity 4. short battery life of the mobile device |
1. Average response time for original frames: 660 ms | 1. real-time image-processing needs computational resources – mobile devices with limited computational capacity and battery life, cause inaccurate detection 2. image-processing is infeasible without communication of devices with external resources 3. time-consuming simplification of gathered information to convey to the user 4. user feedback might demand a significant cognitive effort 5. high video transmission time to the remote server |
| 6 Real-Time Detection of Pedestrian Traffic Lights –Ghilardi et al. (2018) | 1. Image-processing 2. computer vision approach with Faster R-CNN deep neural network 3. public dataset with 4,399 labeled images of pedestrians traffic lights, the Pedestrian Traffic Light Dataset (PTLD) |
1. embedded in a mobile device | 1. The precision score of Faster R-CNN is small but competitive | 1. Faster R-CNN results for classes Go and Stop: 2. 0,37 fps GO Recall (%) 97.7 GO Precision (%)93.5 STOP Recall (%) 98.9 STOP Precision (%) 90.2 |
1. Faster RCNN is much more time-consuming during prediction time, so a sampling strategy is necessary 2. the simplification of the gathered information is time-consuming 3. user feedback has a significant cognitive effort |
| 7 Zebralocalizer – Ahmetovic et al. (2011) | 1. computer vision functionality on a smartphone 2. data acquired from camera and accelerometers 3. information about crosswalks |
1. identification and localization of crosswalks 2. no additional infrastructure required at each intersection 3. real-time feedback about orientation and location relative to a crosswalk 4. device orientation doesn’t influence recognition and rotation technique, low processing complexity |
1. delay due to network latency | 1. 70% of zebra crossings recognized 2. all users were able to cross the road (about 6 m wide) in a short time ranging from 3 to 5 sec 3. the use of accelerometers increases the accuracy |
1. to guarantee safe road crossing, algorithm false-positives = 0 2. user attention should not be diverted from haptic and auditive stimuli 3. mental workload should not be increased with overmuch information |
| 8 TL-recognizer – Mascetti, Ahmetovic, Gerino, and Bernareggi, et al. (2016a, 2016b) | 1. accelerometers and gyroscopes 2. computer vision techniques 3. dynamic method for exposure adjustment (sky pixels segmentation and external luminosity) 4. messages transferred through audio, haptic (vibration) and graphical information |
1. computational and human-based experiments (2 BVIs and 2 low-visioned) 2. robust (working in different illumination conditions) 3. efficient (running several times a second on smartphones) |
1. constant hand interaction from the user for conveying feedback and for carrying the device effectively 2. fatigued pedestrians from carrying the device |
1. precision = 1, (no traffic light is erroneously detected) 2. the two blind subjects needed a slightly longer time (up to about 5 s) than the two partially sighted subjects (22) 3. computation time is in the order of 100 ms, FPS = 10 (34) Tuning Recall = 0, 85 Computation time = 113 ms Evaluation Recall = 0,81 Computation time = 107 |
1. audio should not divert the BVI’s focus on the surrounding audio scenario 2. no accelerometer measurements for each frame 3. precision and recall are computed on streams of images, not on single images |
| 9 ZebraRecognizer – Mascetti, Ahmetovic, Gerino, and Bernareggi (2016) | 1. pattern matching technique to recognize zebra crossings 2. software module that a. rectifies selected features b. removes projection distortion c. measures precise zebra crossing’s position 3. comparison with 2 different algorithms for line segment detection: a customized version of EDLines and Line Segment Detector (LSD) |
1. quality of recognition (precision and recall) 2. recognition accuracy and estimation of user relative position 3. efficiency on mobile devices 4. processing images acquired at a high frame rate from the camera 5. no false-positive 6. a low number of false negatives 7. regular updates on BVI’s position 8. not being overwhelmed with too many audio messages |
1. calculation of ‘lateral distance left’ and ‘lateral distance right’ 2. EDLines don’t recognize the whole stripe edge (inaccurate border computation) 3. the absolute value of the difference between distance (frontal, angular, or left/right shift) and predicted (correct) one is an error value 4. difficulty in checking for sudden changes (rotation angle–capability for quick rotating) 5. distance approximation 6. inaccurate projection of user position on CLS 7. problems with app debugging, parameters tuning and performance measuring |
1. in a few non-consecutive frames the error is around 1 m 2. IMAGE acquisition process time is 25 fps 3. average error of rotation angle is 2.2° 4. estimation time of CPU implementation is 2.5 ms and 9.67 ms for images with resolution 90_160 pixels and 180_320 5. estimation time with the LSD is 3 times longer than with EDLines 5 with the GPU implementation of anchors extraction improved 30% 6. 93% correct identification of zebra crossings 7. in 96% of cases frontal distance: error smaller than 50 cm, rotation angle: error smaller than 10° |
1. data used for evaluation are not public, so quantitative evaluation is impossible 1. low execution time for the identification process 2. improvement of all main steps of recognition algorithm 3. less computational costs |
| 10 Mobile Accessible Pedestrian (MAP) Signal system–NYC (‘Mobile accessible pedestrian signal system’, n.d.) | 1. reception of MAP (Mobile Accessible Pedestrian signal system) and SPaT (Signal Phase and Time) information from a smart device 2. communications in the DSRC spectrum 3. MAP message (location of crosswalks, pedestrians and device’s features) determines the orientation 4. SPaT message instructs path condition 5. Communications to/from traffic controller will use DSRC (5.9 GHz. 1609.x, J2735) message sets 6. use of MAP and SPaT messages from PED (pedestrian application) 7. use of SCMS (Security Credential Management System) for authentication of SPaT and MAP messages from roadside units 8. special permission to use the PED call feature |
1. security 2. avoidance of Certificate Revocation List (CRL) issues and misbehavior detection management 3. use of SCMS a. Wi-Fi locally between PID (Personal Information Devices) and RSU at the intersection b. 4G/LTE data exchanges between PID and server that provides SPaT and MAP info |
1. Special hardware infrastructure at each (signalized) intersection | 1. security and subscription issues with the use of the application |
|
| 11 Mobile Accessible Pedestrian Signals (MAPS)–Chen-Fu (2012) | 1. prototype MAPS |
1. The APS system generates auditory cues continuously to help blind pedestrians locate the pushbutton |
1. Special hardware infrastructure needs to be installed at each (signalized) intersection to inform the user precise location and status of signal lights. |
1. 57% of the participants trust the MAPS system |
1. acoustic signals from APS systems are often confusing (8) |
| 12 Wearable devices with RGB-Depth images utilization – Cheng et al. (2018) | 1. the customized wearable device–Intoer (‘Intoer’, n.d.) |
1. computation of detected objects’ distance to the BVI |
1. false detections of pedestrians ruled out by the proposed detector | 1. 200 ms speed processing time |
1. the detector has more depth information into consistency analysis in comparison to AECA |
| 13 A wearable tactile traffic lights assistive device (WTTLAD) – Huang et al. (2017) | 1. wearable tactile traffic lights assistive device (WTTLAD) |
1. user performance experiments with 2 subject – tests (visually impaired and blindfolded) in two fields: in a laboratory (indoor field) and at a road intersection (outdoor field) |
a. reduced hearing in a noisy traffic situation |
1. average correct recognition rate = 96.67% |
1. Problems of intersection buzzers (examples) |
| 14 RTLS and NFC system–Periša et al. (2015) | 1. RTLS (Real-Τime Locating Systems) (identification system) |
1. increased intermodal container transportation, mobility, safety and overall effectiveness |
1. user speed (proportional to the length of the green process) confuses the BVI users |
1. passive tag data = 48 to 736 bytes |
1. RFID Advantages |
| 15 Crosswatch – Ivanchenko et al. (2008)
|
1. computer vision algorithm |
1. two tests with BVIs |
1. precise device position (portrait or landscape) is kept, but BVI may rotate the device while in motion |
1. algorithm processes approximately 3 fps |
1. no added infrastructure needed |
| 17 Crosswatch system – Coughlan and Shen (2013) | 1. computer vision algorithms |
1. two blind volunteer subjects (no light perception) |
1. functional and technical issues with computer vision and sensor components, especially on adverse illumination and weather conditions or fading of crosswalk paint |
1. spatial precision is better than a meter |
1. no added infrastructure needed |
| 18 Machine learning prediction models for pedestrian traffic flow levels – Cohen and Dalyot (2020) | 1. machine learning methods and computerized route planning algorithm for predicting pedestrian traffic flow levels |
1. machine learning algorithms accurately generate necessary temporal data |
1. micro-mapping issues in geographical features in OSM |
1. prediction results by implementing six machine learning algorithms |
1. additional extensive data received from BT sensor systems or other sensory infrastructure |
| 19 MANTO project (Filios & Meliones, 2021a, 2021b; Theodorou & Meliones, 2022) | 1. sub-meter GPS positioning, |
1. A fulfilled system containing |
1. GPS coverage |
1. sub-meter accuracy contribution | 1. training capability in secure and simulated conditions |
VCST: voice-controlled smart traffic; PTLD: Pedestrian Traffic Light Dataset; LSD: Line Segment Detector; MAP: Mobile Accessible Pedestrian; RGB: red green blue; GIS: geographic information systems; API: Application Programming Interface; AWS: Amazon Web Services; RCNN: Region-Based Convolutional Neural Networks; FPS: Frame Per Second; CLS: Closest Line Segment; GPU: Graphical Processing Unit; NYC: New York City; DSRC: Dedicated Short-Range Communication; MAC: Media Access Control; SVM: Support Vector Machine; RFID: Radion Frequency Identification; KB: Kilo Byte; SIG: Special Interest Group; RF: Radio Frequency; BT: Bluetooth; BOM: Bill of Materials; LED: Light Emitting Diode; GO: Command; PED: pedestrian; MHz: MegaHertz; MANTO: Name of the project
Author contributions
Conceptualization: P.T. and A.M.; Data curation: P.T.; Formal analysis: P.T.; Investigation: P.T.; Methodology: P.T. and A.M.; Project administration: A.M.; Supervision: A.M.; Writing – original draft: P.T.; Writing – review & editing: P.T. and Α.Μ. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Greek RTDI State Aid Action RESEARCH-CREATE-INNOVATE of the National Operational Programme Competitiveness, Entrepreneurship and Innovation 2014–2020 in the framework of the T1RCI-00593 MANTO project.
Informed consent
Informed consent was obtained from all individual participants included in the study.