
Abstract
The Sense of Ownership (SoO) and the Sense of Agency (SoA) are two key components of bodily self-consciousness. In this experiment, we investigated how they are affected by variations in the ecological validity of the moving Rubber Hand Illusion (mRHI) paradigm, which typically include three movement conditions: active congruent, passive congruent, and active incongruent. These conditions were either in a session in which no auditory feedback associated with finger-tapping was eliminated, or in a session in which such a feedback occurred. Since the presence of the auditory feedback more closely corresponds to what individuals experience in daily life when they tap their finger on a surface, sessions with feedback are more ecologically valid, and should thus result in a more marked SoO. Results indicated that in the active movement condition in which the illusion is typically found (congruent), the effect was enhanced when the feedback was present. This advantage emerged on both on objective and subjective measures of SoO. The SoA, on the other hand, is not affected by the auditory feedback.
Keywords
The Sense of Body Ownership (SoO) is the feeling that our body belongs to oneself (De Vignemont, 2010; Gallagher, 2000) resulting from multisensory body-related signals (Braun et al., 2018; Ehrsson et al., 2004). The Sense of Agency (SoA) is the experience of initiating and controlling an action with an impact upon the environment (Haggard & Chambon, 2012; Moore & Fletcher, 2012), brought about by the match between motor command and sensory feedback (Frith et al., 2000). Different neural networks underlie the SoO and the SoA. The areas underpinning the SoO are the right posterior insula (Tsakiris et al., 2007a; Tsakiris et al., 2007b), the bilateral intraparietal and premotor cortex (Brozzoli et al., 2012; Ehrsson et al., 2004; Petkova et al., 2011), the posterior parietal cortex (Brozzoli et al., 2012; Grivaz et al., 2017), the right ventral premotor cortex, left anterior insula (Grivaz et al., 2017), left inferior parietal lobule and left extra-striate body area (Seghezzi et al., 2019) (see, however, a critique of this mapping by Nilsson & Kalckert, 2021). Also, Ehrsson et al. (2004) compared the functional images obtained after the SoO's development with those collected before the illusion occurs, showing enhanced activation of the left precentral sulcus and the right cerebellum. The areas supporting the SoA are instead the prefrontal and parietal cortex (Farrer et al., 2003; Farrer & Frith, 2002; Fink et al., 1999), the dorsolateral prefrontal cortex (Fink et al., 1999), the insula (Brass & Haggard, 2007; Farrer et al., 2003; Karnath et al., 2005; Klein et al., 2007), and the cerebellum (Fink et al., 1999).
Besides mapping their supportive areas in the brain, researchers have investigated SoO and SoA using the Rubber Hand Illusion paradigm (RHI) (Botvinick & Cohen, 1998). Here, a rubber hand is placed in front of the participant where the participant's hidden hand would be. Using a paintbrush, the experimenter proceeds to stroke the real and rubber hands synchronously. In these circumstances, participants tend to develop a feeling of ownership to the rubber hand, while their own hand actually goes unnoticed (Botvinick, 2004; Botvinick & Cohen, 1998). SoO toward the rubber hand can be explicitly measured by asking the participants to indicate how much they feel the hand is their own as well as tested by assessing the proprioceptive drift. This is measured by computing the difference between two estimates of the position of their hidden hand that participants provide before and after the illusion is thought to emerge. The stronger the illusion, the greater the drift will be (Botvinick & Cohen, 1998). Research in this field also suggests that the classic RHI depends on spatial (i.e., the distance between the participant's hand and the rubber hand) and temporal (i.e., the synchrony between the stroking observed and experienced) aspects of the experimental setup. Nava et al. (2018) examined how action shapes the sense of body ownership in adults and children using the RHI paradigm in both visuo-tactile (i.e., classical paradigms) and active synchronous conditions. They found that adults were able to develop the sense of body ownership in the visuo-tactile version with the help of the action component, whereas children did not require the same type of action component to develop the sense of body ownership. This finding supports the idea that preschool children have difficulty developing body awareness without action and motor integration.
The role of movement in the emergence of the illusion has been further investigated using a modified version of the RHI, called the moving Rubber Hand Illusion paradigm (mRHI) (Dummer et al., 2009; Kalckert & Ehrsson, 2012, 2014; Riemer et al., 2013; Tsakiris et al., 2006). In this setup, the rubber hand and the participant's hand are connected (e.g., by using a stick to connect the index fingers of the two hands), so that the participant can move their hidden hand while observing the movement of the rubber hand. In the active condition of the mRHI, at some point during the task participants are asked to lift their right index finger. In the passive condition, the movement is induced by the experimenter and the participant can only observe it. The voluntary movement in the active condition is accompanied by synchronous (i.e., the participant's hand and the artificial hand move synchronously) or asynchronous (i.e., a delay between the participant's hand and the artificial one occurs) movements of the rubber hand. The former is expected to induce a greater SoA. In the passive condition, participants are not allowed to move their hand while observing the rubber hand's movement. Studies using this paradigm show that the proprioceptive drift (i.e., an objective measure of the SoO) towards the rubber hand is higher for the synchronous than for the asynchronous conditions (for similar results with a virtual reality setup, see Kokkinara & Slater, 2014; Ma & Hommel, 2013). Further studies suggest that the illusion towards the rubber hand is greater in the conditions in which the rubber hand is in an anatomically congruent (vs. incongruent; i.e., rotated 180°) position to the real one (see Ehrsson, 2012; Makin et al., 2008; Tsakiris, 2010).
An advantage of this paradigm is that it allows to simultaneously yet separately assess ownership and agency, and thus also to measure their covariance (Kalckert & Ehrsson, 2012). Studies using the mRHI have shown that movement contributes to the SoO, possibly by enhancing the SoA—even though the contribution of SoO and SoA to the emergency of the illusion is rather complex (Seghezzi et al., 2019; Tsakiris et al., 2010).
Of most relevance for our purposes here, the effects of auditory cues on the perception of the hand as one's own have also been reported. Using four different conditions (synchronous touches without auditory cues; asynchronous touches without auditory cues; synchronous touches with synchronous auditory cues; synchronous touches with asynchronous auditory cues), Radziun and Ehrsson (2018) found that synchronous auditory cues made the illusion stronger compared with asynchronous auditory cues. In everyday life, actions are usually associated with an auditory feedback: if we tap on a wooden surface, we hear the sound produced by the tapping. Since the SoA is developed when there is a match between the predicted and the actual outcome of the generated action (Frith et al., 2000; Khalighinejad & Haggard, 2015; Marotta et al., 2021), we could expect when an action which is predictably associated with an auditory feedback is performed, the absence of said feedback contributes negatively and its presence positively to the ecological validity of the experience. To rephrase, we define as ecological valid an experimental setup in which (synchronous) sounds that are typically associated with specific actions, do indeed occur.
To the best of our knowledge, there is currently no research that investigates the role of the self-produced auditory cues on the SoO. Therefore, in this experiment we investigate how self-produced auditory cues that impact on the emergence of SoO.
Building on Kalckert and Ehrsson (2012), we anticipated a partial dissociation of SoO and SoA. Specifically, we expected a SoO and SoA in the active congruent condition; exclusively a SoO in the passive congruent condition; and exclusively a SoA in the active incongruent condition. Furthermore, we hypothesized an increase in SoA in all active conditions with auditory feedback, compared to the active conditions with no feedback. We also expected that, compared to the active congruent condition with no auditory feedback, the active congruent condition with auditory feedback will result in a higher self-reported SoO as well as a faster development of the illusion in the participant.
Materials and Methods
Participants
The minimum sample size was calculated a priori using G*Power 3.1.9.4 (Faul et al., 2007). Setting parameters for a repeated measures within-subjects design with 6 measurements, 95% power, a moderate effect size f of 0.25, an α error probability of 0.05, and a non-sphericity correction ε of 1, a minimum sample of 18 was indicated.
A total of 21 Italian participants (13 females; M = 25.29, SD = 4.44; range 21–33) completed the study. Requirements to participate in the experiment were to be aged between 18 and 35, to have no existing neuropsychological disorders and to be right-handed (for setup configuration). All participants read and provided a written consent form before entering the study. The procedure was approved by the ethical committee of the Department of Cognitive Sciences, Psychology, Education and Cultural Studies, University of Messina (approval n. COSPECS_05_2020) and in accordance with the Italian Association of Psychology code of ethics and the Declaration of Helsinki.
The Moving Rubber Hand Illusion
The mRHI paradigm can be used with a vertical or a horizontal setup. For our experiment, we used a horizontal mRHI setup, placing the participant's right hand and a right rubber hand, next to each other, in a large black box (40 cm × 40 cm × 16 cm). The actual hand of the participant is hidden by being further placed into a smaller box. The two hands are placed so that the distance between the two index fingers was equal to 21 cm (see Kilteni & Ehrsson, 2017; Marotta et al., 2021), which—in our pretest—was a comfortable and spontaneous setting. The participant's index finger and the index finger of the rubber hand, were connected by two rings linked to a wooden stick and the movements were synchronized with a lever mechanism. The two hands were covered with the same glove to imitate the similarity of the rubber hand (Figure 1A). A black drape was used to cover the participant's arms. The study consisted of two sessions, which differed only in the presence (i.e., Feedback session) or absence (i.e., No Feedback session) of the action-related auditory feedback. The action consisted of a double tapping on the wooden surface. Cotton was used on the box's lever mechanism to remove the action-related sound during the No Feedback session, while in the Feedback session no cotton was used, and the tapping on the wooden surface thus resulted in the presence of auditory feedback.
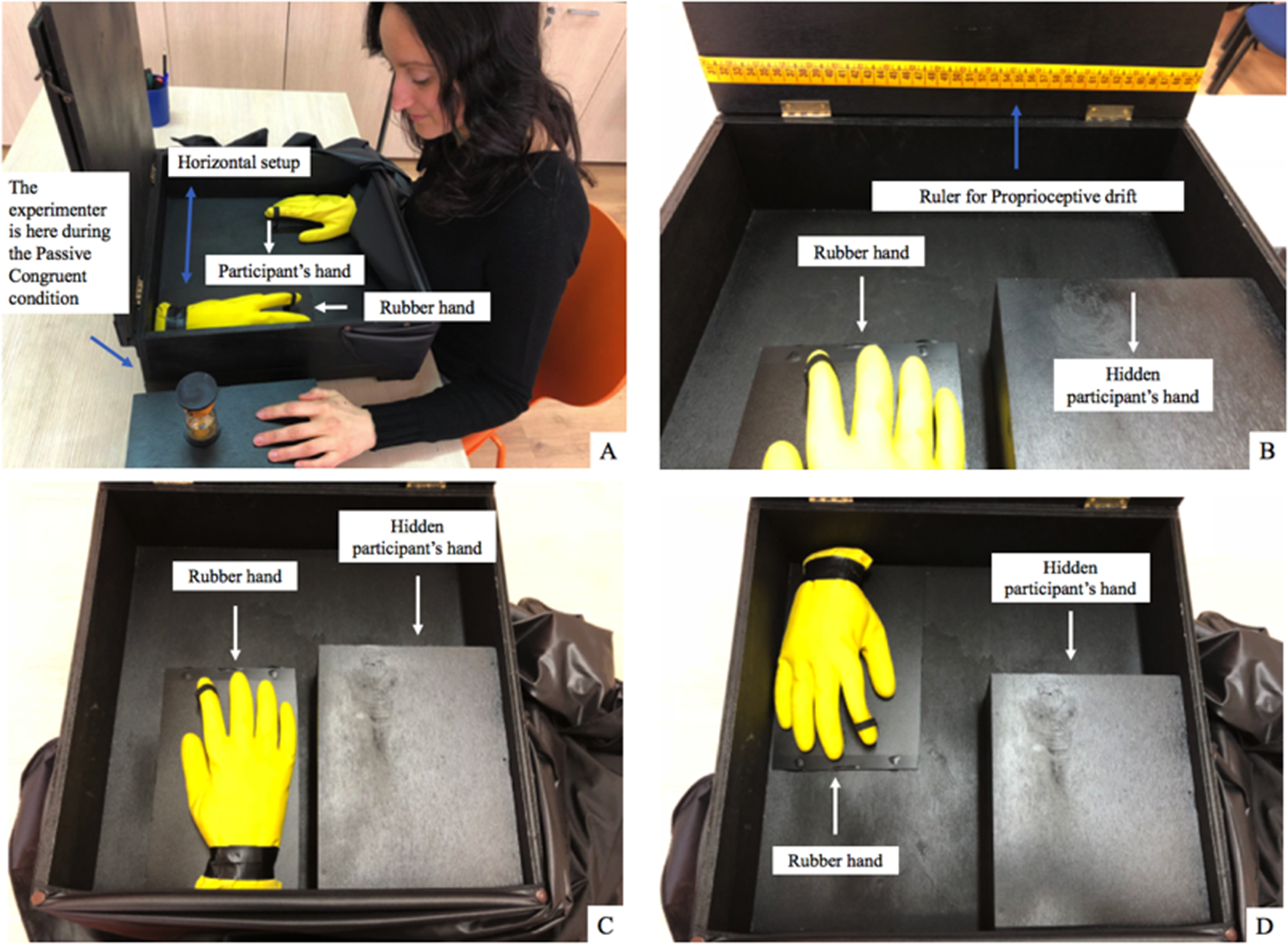
The moving Rubber Hand Illusion (mRHI) setup. Note. (A) Using a horizontal setup, the participant put the right hand inside the box, next to the rubber hand. (B) During the experiment, the participant's hand was hidden, and a ruler was used to measure the proprioceptive drift. (C) In the active and passive congruent conditions, the rubber hand was placed in congruent position to the participant body. (D) In the active incongruent condition, the rubber hand was rotated 180° with respect to the real hand.
Different manipulations were applied: (1) the auditory feedback (Feedback vs. No Feedback); (2) the modality of the movement (i.e., active vs. passive movement); (3) the position of the rubber hand (i.e., congruent vs. incongruent/180° rotated). Three kinds of conditions were tested: (1) active congruent, where participants performed a double tap with their index finger and observed the synchronous movement of the rubber hand placed in congruent position to the participant's body (Figure 1C); (2) passive congruent, where participants did not move their index finger, but the experimenter moved the lever mechanism (Figure 1C); (3) active incongruent, where the rubber hand was rotated 180° (Ehrsson et al., 2004) and participants moved their index finger (Figure 1D), which produced synchronous movement on the rubber index finger. The active incongruent condition was intended to abolish the SoO (Kalckert & Ehrsson, 2012).
mRHI Questionnaire
The questionnaire developed by Kalckert and Ehrsson (2014) was used to obtain subjective measures of SoO and SoA. Twelve statements (see Table 1) were grouped into four categories to assess the experimental ownership (i.e., ownership) and agency (i.e., agency), and the ownership-control and agency-control statements. The latter served to control factors not related to the subjective experience of ownership and agency, such as suggestibility, task compliancy, and expectancy effects (Kalckert & Ehrsson, 2014; Kalckert & Ehrsson, 2012). For each statement, participants indicated their level of agreement on a 7-point Likert scale ranging from −3 = “Totally disagree” to 3 = “Totally agree.” A mean score equal to or greater than 1 on the experimental ownership items is considered evidence that the illusion of ownership has emerged, and a mean score equal to or greater than 1 on the experimental agency items is considered evidence that the illusion of agency has emerged (Kalckert & Ehrsson, 2014; Kalckert & Ehrsson, 2012).
The mRHI questionnaire.
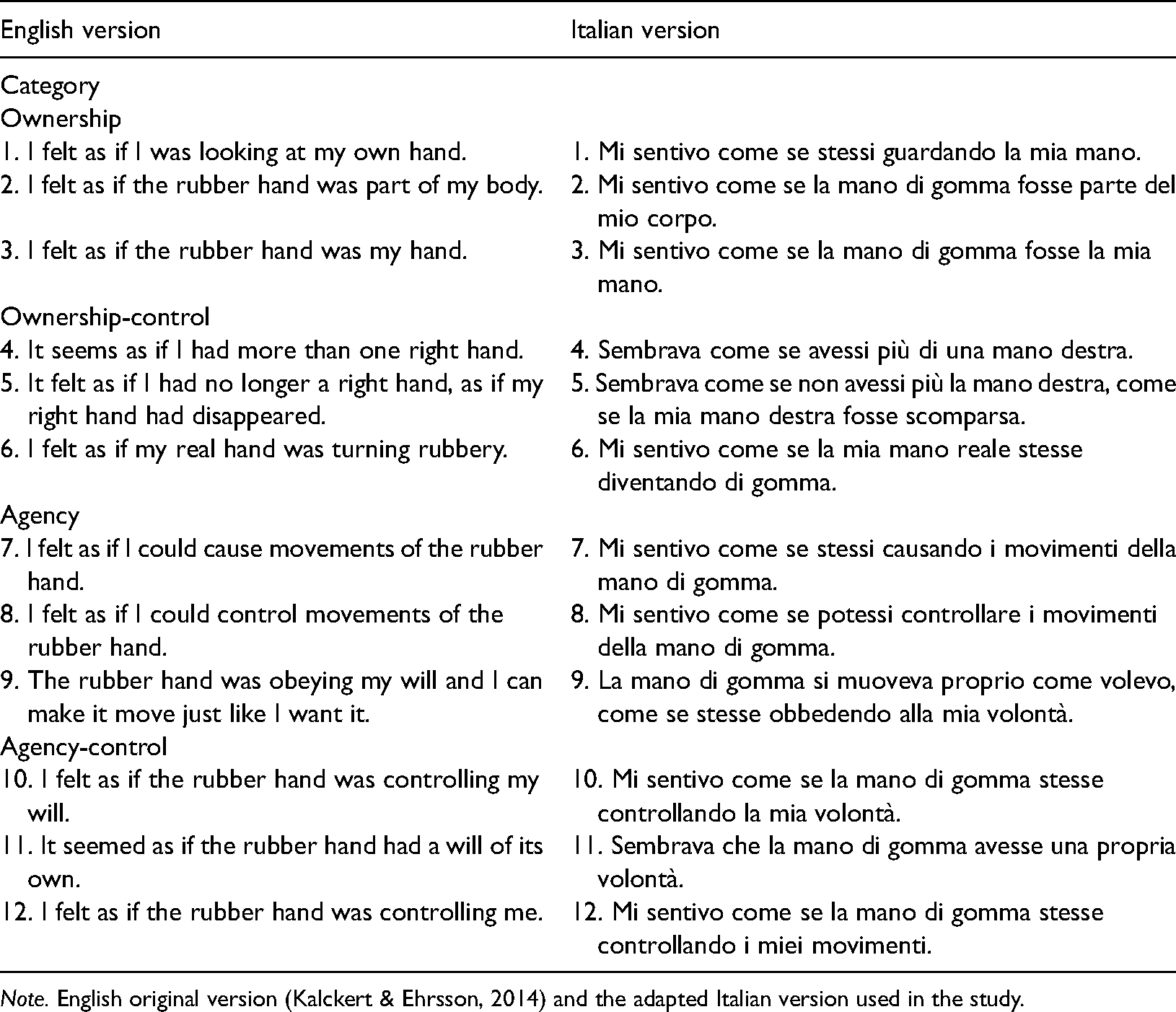
Note. English original version (Kalckert & Ehrsson, 2014) and the adapted Italian version used in the study.
Proprioceptive Drift
As mentioned above, the proprioceptive drift is considered an objective measure of the illusion (Botvinick & Cohen, 1998; Kalckert & Ehrsson, 2014; Tsakiris & Haggard, 2005). It is considered an objective measure of SoO, but unrelated to SoA (Kalckert & Ehrsson, 2012; Longo et al., 2008). The mRHI horizontal setup allowed to measure the proprioceptive drift without the pointing movement of the participants’ left hand (Marotta et al., 2021): with the mRHI box closed, participants were then asked to report the position of their unseen hand's right index finger using a ruler placed in front of them, on the box (Figure 1B). The proprioceptive drift is calculated by the difference between the estimates provided by the participant before and after executing each trial. A positive value indicates an upward drift toward the rubber hand, and the higher the value the greater the illusion.
SoO Onset Time
SoO onset time is an indication of the moment in which the participant begins to feel ownership over the rubber hand. This was measured only in the active congruent condition, across two trials (separated by 45 s; Kalckert & Ehrsson, 2017). During both trials, participants were asked to verbally state (i.e., say, “Now”) when they began to feel the rubber hand as their own (i.e., “the rubber hand is my hand,” see Kalckert & Ehrsson, 2017). The response was measured by the experimenter using a stopwatch.
General Procedure
Following Kalckert and Ehrsson's (2012) experimental procedure, participants first attended a training session, in which they had to perform the double tapping action with the right index finger, on a table, outside the mRHI box. The finger taps’ frequency was 1 Hz (Kalckert & Ehrsson, 2012). Immediately after the training session, participants took part in a first experimental session, before returning, a week later, to carry out the second session. The sessions were identical, apart from the presence versus absence of the auditory feedback. Order of the session was counterbalanced: half of the participants did the Feedback session first and the No Feedback later, and the other half did the reverse. Participants were randomly assigned to one of the two orders. Ten participants started with the Feedback session and 11 with the No Feedback session.
The session started with participants sitting at a table where the mRHI main box was placed, wearing a glove on their right-hand. They were then instructed to close their eyes while the experimenter covered their right arm and inserted it into the smaller box (within the main box). Once the main box is closed, participants opened their eyes but were told not to move either of their arms for the duration of the experiment. Finally, the main box was opened and participants could observe the rubber hand while their right hand remained hidden in the little box, out of view of the participant.
Each session comprised of three conditions, the order of presentation of which was random. Two of the three conditions were active, and participants were instructed to move their finger for 90 s, producing a synchronous movement while observing the rubber hand moving. The third condition was passive condition: participants simply observed the movement produced by the experimenter placed behind the box, without moving their own finger. Proprioceptive drift was assessed for each condition. After each condition, participants also completed the questionnaire. If the participant has SoO (experimental ownership score ≥ 1) in the active congruent conditions, onset time was measured by asking participants to verbally inform the experimenter when they began to feel ownership over the rubber hand. As in previous studies, the maximum duration of each condition is equal to 90 s. If a participant fails to verbally inform the experimenter within 90 s, the experimenter concludes the condition. Finally, participants closed their eyes while the experimenter removed their hand from the box, and were then asked to return on another day to perform the second session following the same procedure. After executing the second session, participants were debriefed, thanked, and released.
Analytical Strategy
Statistical analyses were performed using SPSS-27 (Armonk, NY: IBM Corp).
We used a within-subjects experimental design with a random order execution of the two sessions for each participant. For all the analyses, the critical value for significance was set at p = .05. First, we checked the normality of variable distribution with the Shapiro-Wilk test, which revealed that our data were not normally distributed (p < .05): non-parametric analyses were thus conducted.
Average scores were computed for each category of the questionnaire by averaging the pertaining items (see Table 1). Preliminary analyses were carried out using the Wilcoxon signed-rank test to check the elicitation of the SoO and SoA in the mRHI paradigm, for both the sessions. The SoO and SoA's mean scores were thus compared with the ownership and agency's control statements, respectively. A significant difference between experimental and control statements is typically expected in the presence of a significant illusion effect (Kalckert & Ehrsson, 2014; Kalckert & Ehrsson, 2012), and thus we also expected to find it in our data. Specifically, we expected significant differences between the experimental and the control statements, for ownership in the congruent conditions (i.e., SoO's development), and for agency in the active conditions (i.e., SoA's development). The Friedman test was used to explore SoO and SoA across conditions. The Wilcoxon test was also used to compare SoO and SoA within and between conditions, and between sessions (Feedback vs. No Feedback). For the proprioceptive drift, we used the Friedman test to compare the SoO across conditions and the Wilcoxon signed rank-test to compare the SoO between conditions. The Spearman coefficient was used to assess two-tailed correlations between the questionnaire's ownership mean scores and the proprioceptive drift in all conditions, for each session. Onset times were measured only for participants who developed a SoO (ownership statements score ≥ 1) in the mRHI questionnaire in the two active congruent conditions. The Wilcoxon signed-rank test was used to compare onset times in active congruent condition between the two sessions.
The data set is available at https://osf.io/5ysg8/.
Results
Elicitation of the SoO and SoA in mRHI
The analyses of the questionnaire scores in the Feedback and No Feedback sessions (Table 2) revealed that the mRHI paradigm was successful in eliciting SoO and SoA.
Means and standard errors for ownership and agency's experimental statements and their respective control statements, in the Feedback session.
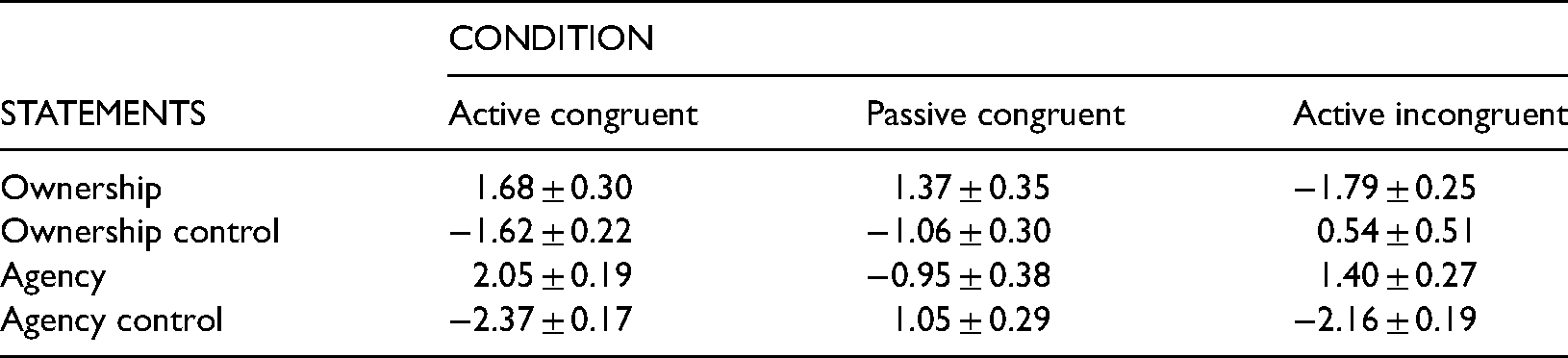
Feedback session (Table 2). Results indicated that the active congruent condition resulted in higher experimental scores than control scores for both ownership (Z = −3.92, p < .001) and agency (Z = −4.02, p < .001), showing that participants experienced a SoO and SoA. In the passive congruent condition, the experimental ownership was higher than the ownership control (Z = −3.56, p < .001), while the control agency was higher than the experimental one (Z = −2.75, p = .01). Thus, in the passive congruent condition, participants experienced a SoO but not a SoA (Kalckert & Ehrsson, 2014). In the active incongruent condition, the ownership control score was higher than the experimental one (Z = −3.28, p = .001), while the experimental agency was higher than control agency (Z = −4.02, p < .001).
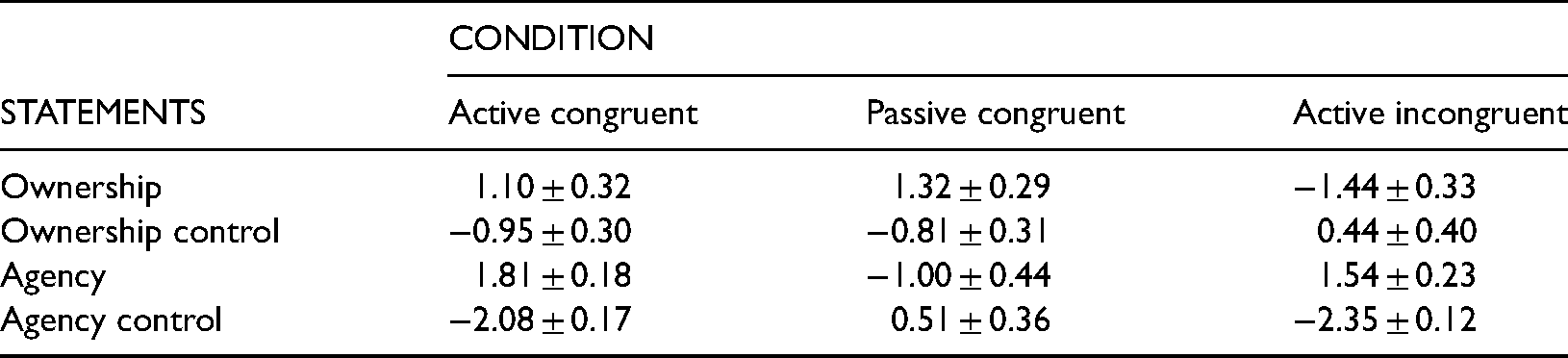
No Feedback session (Table 3). In the active congruent condition, the experimental score was significantly higher than the control score for both ownership (Z = −3.89, p < .001) and agency (Z = −4.03, p < .001). Thus, participants experienced a SoO and SoA. In the passive congruent condition, the experimental ownership was higher than the ownership control (Z = −3.74, p < .001), while there was no significant difference between experimental and control agency (Z = −1.98, p = .05). Thus, participants experienced a SoO but not SoA. In the active incongruent condition, the ownership control score was higher than the experimental one (Z = −2.99, p = .003), while the experimental agency was higher than control agency (Z = −4.02, p < .001).
Means and standard errors for ownership and agency's experimental statements and their respective control statements, in the No Feedback session.
SoO and SoA Across Conditions
SoO was significantly different across the three conditions in each session (Feedback: χ2 = 32.87, p < .001; No Feedback: χ2 = 26.15, p < .001), as so was SOA (Feedback: χ2 = 24.31, p < .001; No Feedback: χ2 = 8.87, p = .01). Details of inter-condition differences are detailed below.
SoO and SoA Within and Between Conditions
Figure 2 shows the results of the SoO and SoA.
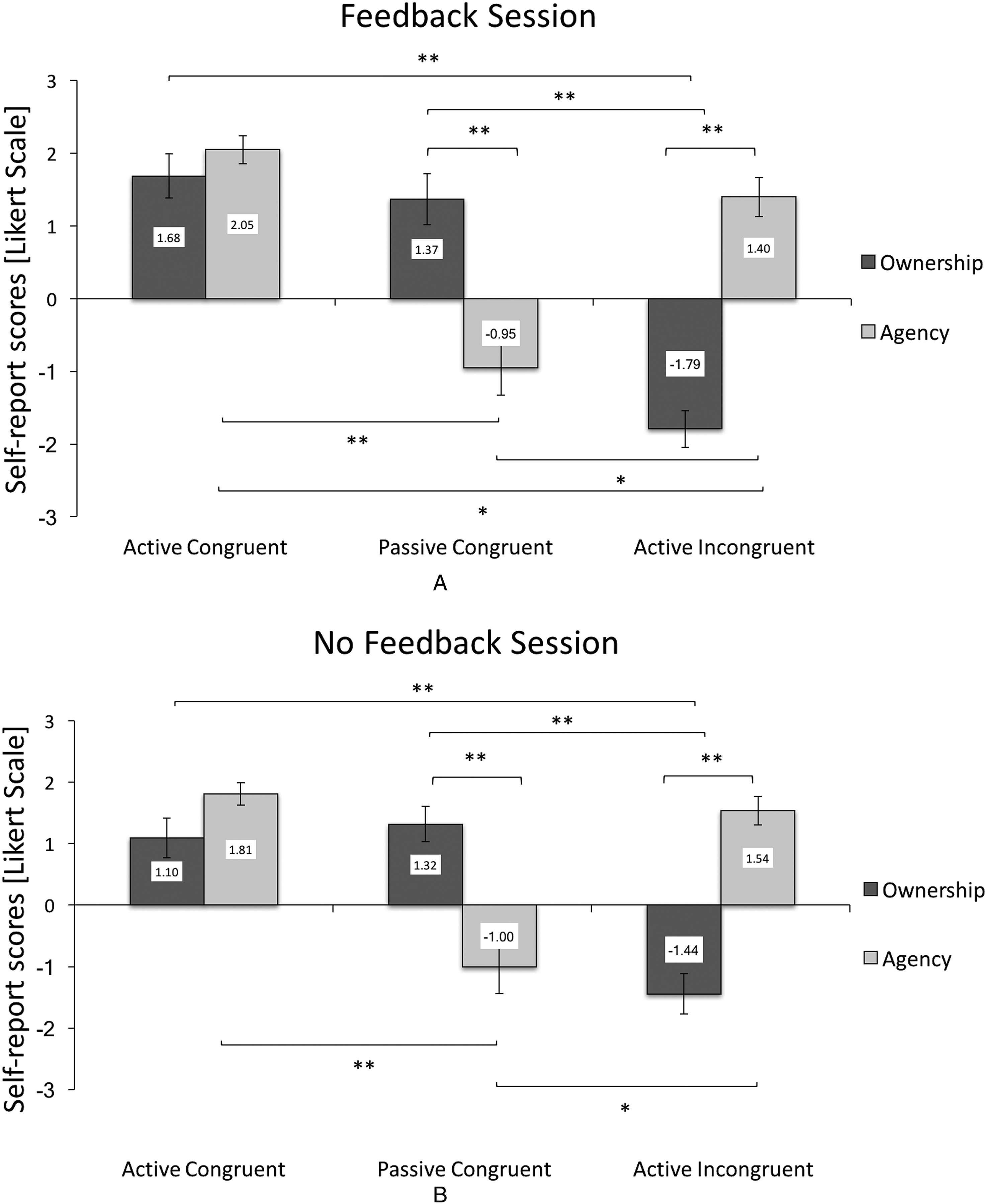
Ratings for ownership and agency's experimental statements in the Feedback and No Feedback sessions. Note. Columns report mean scores for ownership and agency in Feedback session (A) and No Feedback session (B), for the active congruent, passive congruent, and active incongruent conditions. Error bars indicate standard error. *p < .05. **p < .001.
Feedback session (Figure 2A). In the active congruent condition no significant difference between SoO and SoA emerged (Z = −0.82, p = .41), while in the passive congruent condition, SoA was significantly lower than SoO (Z = −3.85, p < .001). In the active incongruent condition, SoA was significantly higher than SoO (Z = −3.73, p < .001). SoO was higher in the two congruent conditions compared to the incongruent condition (active incongruent vs. active congruent: Z = −3.92, p < .001; active incongruent vs. passive congruent: Z = −3.92, p < .001). No significant SoO differences emerged between passive congruent and active congruent conditions (Z = −1.37, p = .17). SoA differed between the passive congruent and the active congruent (Z = −3.91, p < .001), active incongruent and active congruent (Z = −2.16, p = .03), and passive congruent and active incongruent conditions (Z = −3.22, p = .001).
No Feedback session (Figure 2B). The active congruent condition did not report a statistically significant difference between SoO and SoA (Z = −1.48, p = .14). Passive congruent conditions showed higher SoO than SoA (Z = −3.49, p < .001) and the active incongruent condition showed a higher SoA than SoO (Z = −3.81, p < .001). SoO scores were higher in the two congruent conditions than incongruent condition (active incongruent vs. active congruent: Z = −3.83, p < .001; active incongruent vs. passive congruent: Z = −3.87, p < .001). SoO difference was not significant between active and passive congruent conditions (Z = -.34, p = .74). The SoA difference was significant between passive and active congruent conditions (Z = −3.43, p < .001) and between active incongruent and passive congruent conditions (Z = −2.99, p = .003), but not between active incongruent and active congruent conditions (Z = −1.20, p = .23).
SoO and SoA Between Sessions
A significant difference in SoO emerged in the active congruent conditions, with a higher score in the Feedback compared to the No Feedback session (Z = −2.25, p = .02). No significant differences were reported in the passive congruent (Z = −0.26, p = .79) or active incongruent (Z = −1.11, p = .27) conditions. No significant differences in SoA emerged in the active congruent (Z = −1.07, p = .29), passive congruent (Z = −0.24, p = .81), or active incongruent (Z = −0.05, p = .96) conditions.
Proprioceptive Drift Across Conditions
The Friedman test revealed a significant difference across conditions (Feedback: χ2 = 21.34, p < .001; No Feedback: χ2 = 11.03, p = .004).
Proprioceptive Drift Within Sessions
Figure 3 reports the results of the proprioceptive drift comparison within conditions, in the Feedback and No Feedback session.
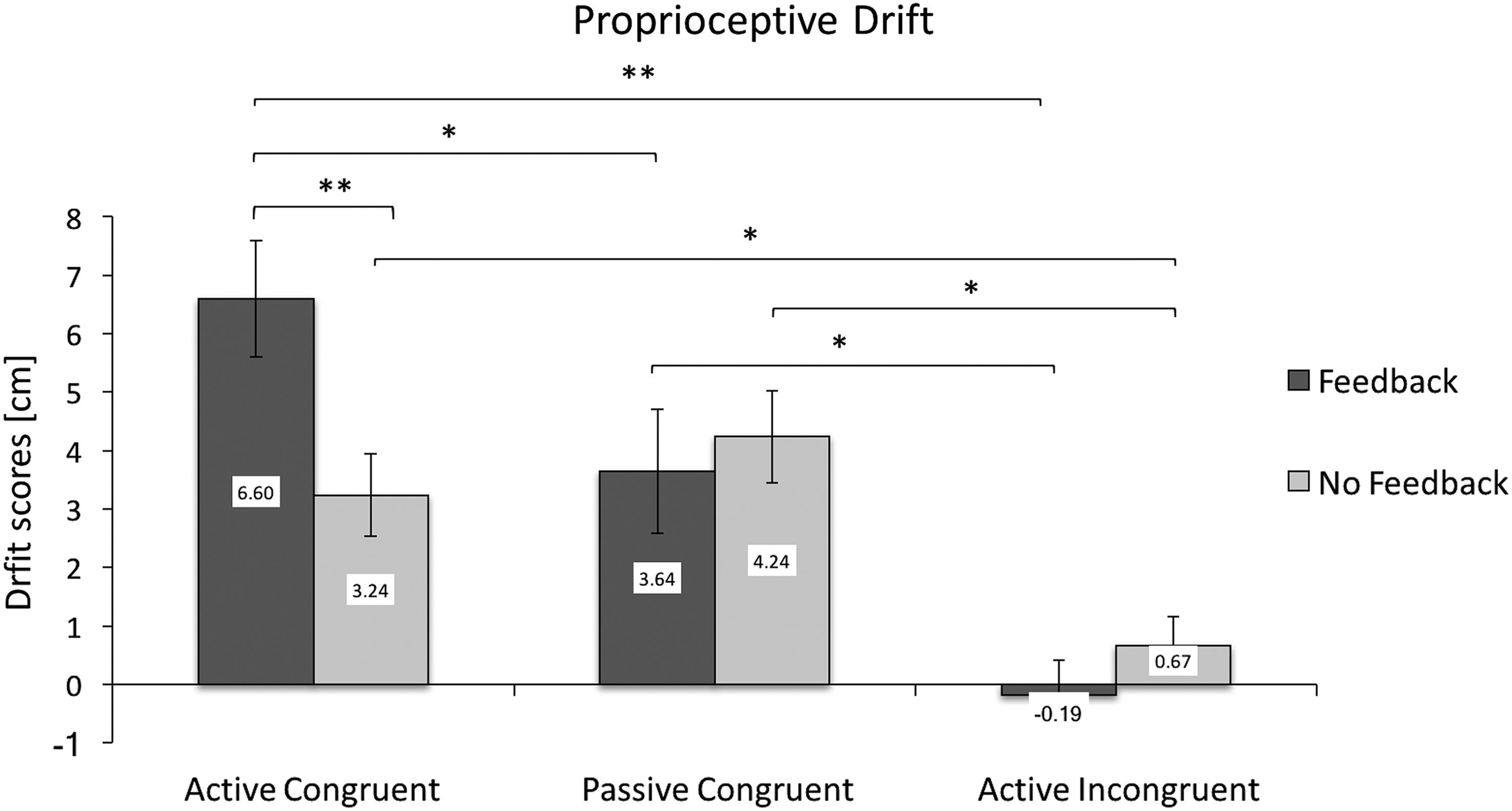
Proprioceptive drift in the Feedback and No Feedback sessions. Note. Columns report mean scores for proprioceptive drift in active congruent, passive congruent, and active incongruent conditions. Error bars indicate standard error. *p < .05. **p < .001.
Feedback session. Significant differences emerged when comparing active congruent vs. passive congruent (Z = −2.44, p = .02), active congruent vs. active incongruent (Z = −3.69, p < .001), and passive congruent vs. active incongruent (Z = −2.95, p = .003) conditions. Positive correlations between the questionnaire's ownership statements and the proprioceptive drift emerged in the active congruent (r = .78, p < .001) and passive congruent (r = .50, p = .02) conditions, but not in the active incongruent condition (r = −.08, p = .72).
No Feedback session. No significant difference emerged between active congruent and passive congruent (Z = −0.96, p = .34) conditions. Significant differences emerge, however, between active congruent and active incongruent (Z = −2.82, p = .01), and passive congruent and active incongruent (Z = −3.27, p = .001) conditions. Positive correlations between the questionnaire's ownership statements and the proprioceptive drift emerged in the active congruent condition (r = .73, p < .001), but not in the passive congruent (r = .39, p = .08) and active incongruent (r = .02, p = .94) conditions.
Proprioceptive Drift Between Sessions
Figure 3 displays mean scores for the proprioceptive drift as a function of condition and session. A comparison between sessions revealed a significant difference in the active congruent condition (Z = −3.53, p < .001), such that greater drift occurred in the Feedback compared to the No Feedback session. No differences emerged between these two sessions emerged in the passive congruent condition (Z = −0.40, p = .69) or in the active incongruent condition (Z = −1.11, p = .27).
SoO Onset Time
Figure 4 displays the onset times as a function of session, only in the active congruent conditions (for they are the only conditions in which onset time was measured). Fifteen participants developed a SoO (experimental ownership score ≥ 1) in both sessions. One participant who did not report the SoO illusion within 90 s was thus excluded. A comparison between conditions revealed a significantly shorter SoO onset time in the Feedback (M = 13.22; SE = 1.32) compared to the No Feedback (M = 18.26; SE = 1.93) session (Z = −3.26, p = .001).
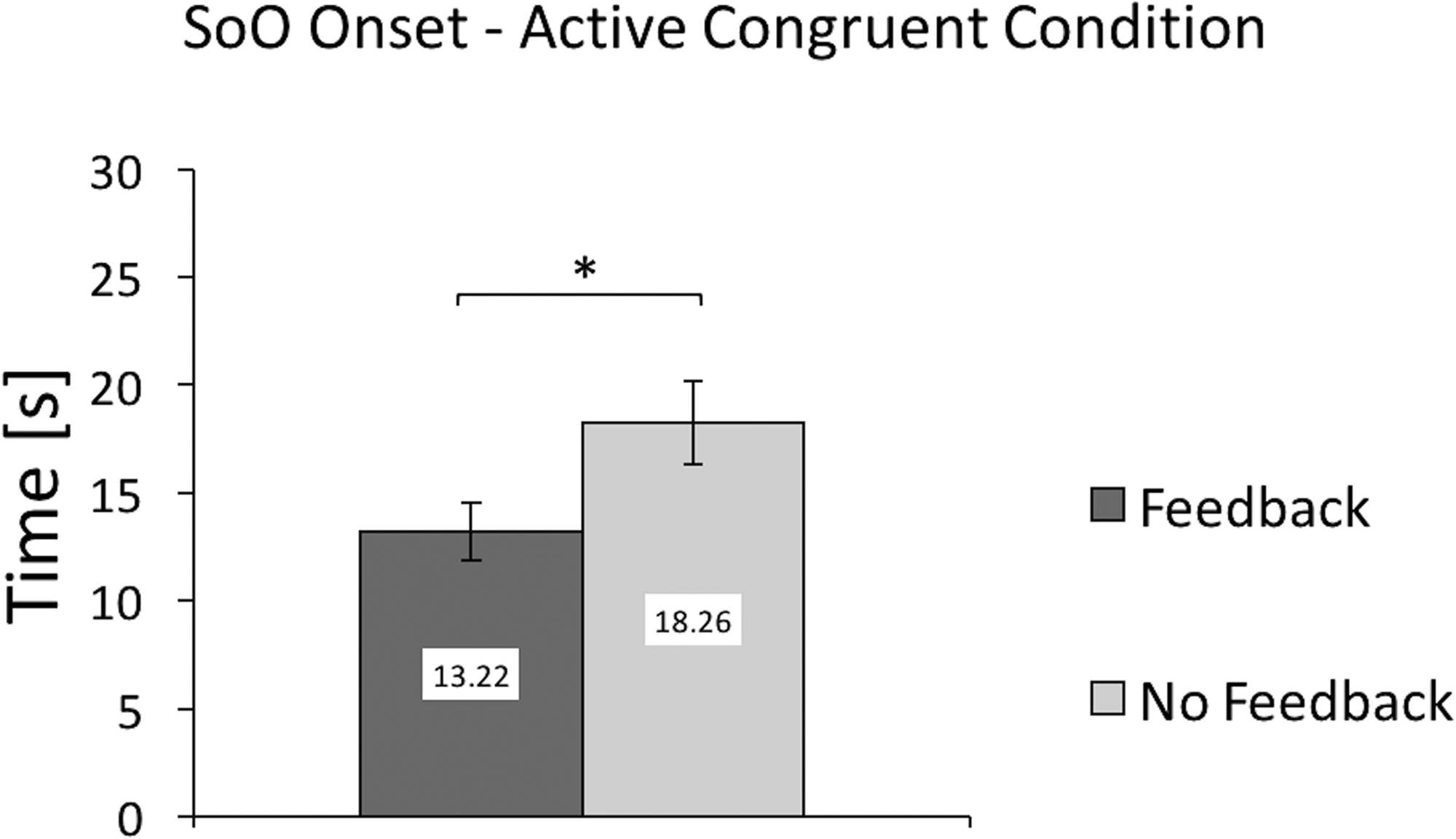
SoO onset times in the active congruent conditions. Note. Columns report mean scores for the active congruent conditions in Feedback and No Feedback sessions. Error bars indicate standard error. *p < .05.
Discussion
Different sensory inputs (e.g., visual, proprioceptive, tactile, and auditory) are integrated in the brain to create an internal body representation (Ehrsson et al., 2004; Gallagher, 2000). This representation, and the related SoO and SoA, are constantly updated so to allow for accurate perception of our bodily position in the environment. The role of visual and tactile inputs on SoO has been well-investigated, notably through the RHI paradigm, and the mRHI paradigm has further allowed to investigate the effect of movement on SoA (Moore, 2016; Moore & Fletcher, 2012). The role of auditory cues in modulating SoO and SoA, however, has not been the object of much research. Here we presented the results of an experiment which investigated the modulating effect of auditory cues in the emergence of these two aspects of body consciousness.
We reasoned that many of the actions that we perform in everyday life produce sounds, and that these sounds help us situate our body position and movement, and thus influence our body consciousness. Specifically, we hypothesized that the presence of an auditory feedback that matches what a person would normally expect to hear when performing an action in the environment, would enhance the person's SoO.
To test this general hypothesis, and a series of related hypotheses, we conducted an experiment using the mRHI paradigm which comprised of various conditions (active congruent, active incongruent, and passive congruent) across two sessions (auditory Feedback vs. No Feedback).
We hypothesized the emergence of a SoO and of a SoA in the active congruent condition, only of a SoO in the passive congruent condition, and only of a SoA in the active incongruent condition. Furthermore, within the active conditions, we expected higher SoA in Feedback compared to the No Feedback session, and within the Active Congruent condition, a higher SoO in the Feedback compared to the No Feedback session. Finally, within the active congruent condition, we expected a higher SoO onset time in the No Feedback compared to the Feedback condition.
Overall, the analyses in both the Feedback and No Feedback sessions showed that SoO score for experimental items was higher than SoO score for the control item, in the active and passive congruent conditions, and lower than the SoO score for the control item in the active incongruent condition. Thus, as expected, participants experienced a SoO in the two congruent conditions, whereas when the hand was rotated 180° relative to the participants’ body (i.e., the incongruent condition), SoO did not emerge (Costantini & Haggard, 2007; Ehrsson et al., 2004; Holle et al., 2011; Pavani et al., 2000; Tsakiris & Haggard, 2005). Also as expected, within the active conditions, the SoA score for experimental items was higher than the SoA score for the control items. In contrast, the SoA score for experimental items in the passive congruent condition was lower than that of the SoA score for score items, indicating that agency illusion did not develop when the participants did not perform any actions. Overall, this pattern of results confirms that the paradigm worked as expected.
With regard to the specific hypotheses we put forward, SoO and SoA did not differ within each active congruent condition (regardless of the presence or absence of feedback). In contrast, the passive congruent and active incongruent conditions showed significant differences: a higher SoO than SoA emerged in the passive congruent condition, and a higher SoA than SoO in the active congruent condition. Moreover, no significant SoO difference was found between the two congruent conditions supporting the dominant role of visual inputs over proprioception (Ernst & Banks, 2002), the importance of the position of the rubber hand for correct multisensory integration (Makin et al., 2008; Rohde et al., 2011; Tsakiris & Haggard, 2005), and the possibility of obtaining a strong possession illusion even in the passive condition (Walsh et al., 2011).
Most importantly for the purposes of this study, a between-session comparison revealed significantly higher SoO in the Feedback than No Feedback active congruent conditions. The same comparison was not significant for the SoA. These findings indicate that action-related auditory feedback influences the SoO but not the SoA.
The results for proprioceptive drift and SoO onset times are consistent with what observed for the questionnaire data. In the congruent conditions, the proprioceptive drift was higher in the active than in the passive condition, but only in the Feedback session. In contrast, in the No Feedback session, no significant differences emerged between these two conditions. This result is consistent with previous findings that active and passive conditions develop similar proprioceptive drifts (Kalckert & Ehrsson, 2012). Furthermore, it is only in the active congruent condition that a difference between sessions emerge: proprioceptive drift is higher in the Feedback than in the No Feedback session.
Correlations between proprioceptive drift and SoO questionnaire scores were investigated (Kalckert & Ehrsson, 2014). In the Feedback session positive correlations between proprioceptive drift and SoO questionnaire scores were found in the active and passive congruent conditions—that is, in the conditions where the SoO occurred. In contrast, in the No Feedback session, a positive correlation emerged in the active congruent but not in the passive congruent condition. This finding aligns with current the dissociation between the proprioceptive drift and the subjective ownership illusion evidenced in previous studies (Abdulkarim & Ehrsson, 2016). Also, the lack of correlation between SoO questionnaire scores and proprioceptive drift in the passive congruent condition/No Feedback session, suggests difficulty in development of SoO, compared to the passive congruent condition/Feedback session. Finally, in the two active incongruent conditions, a correlation between questionnaire and proprioceptive drift was not found.
Also in direct support of our hypothesis is the pattern that emerged on the onset time variable. In the active congruent conditions, we found faster onset in the Feedback than No Feedback session, suggesting that the auditory feedback results in faster emergence of the SoO illusion.
All in all, the pattern that emerged on the self-reported SoO, proprioceptive drift, and onset times, all converge in suggesting that active movement contributes to the development of a SoO not only via the proprioceptive, visual and tactile feedback, but also through the sound that they produce. Our hypothesis relative to the role played by auditory feedback built on the idea that since certain actions that we carry out in daily life produce a sound, if similar actions are carried out in the trials of a mRHI study, the presence of the associated sound would make the situation more ecologically valid. Since in daily life, if we tap with our finger on a wooden surface, a sound is produced, adding the sound to such a tapping in the context of the mRHI paradigm contributes a further sensory (auditory) input to the other inputs (e.g., visual, proprioceptive, tactile) the effect of which on the emergence of a SoO has been well documented. For these reasons, we consider that the present study makes use of a paradigm that enhanced the ecological validity of the experience. The results are consistent with this idea. This being said, we are not claiming that an auditory feedback associated with an action is always necessary for a SoO to emerge. There are plenty of actions for which a sound is not expected, and thus adding a sound may actually interfere with the emergence of a SoO. The key is, in fact, in the degree of ecological validity of the experimental setup.
Limitations of the Study
This study provides a first evidence of the role of ecologically valid auditory signals on the emergence of a SoO. Despite this contribution, this study is not free of limitations. First, while the proprioceptive drift provides an objective measure of SoO, we had no equivalent for the SoA. At present, we are aware of no established objective measure of SoA in the context of the mRHI. Such objective measure is of particular importance if we consider that particularly in the context of outcomes that confirm our expectations, explicit measures are likely biased. As shown by Haggard (2017) and Haggard et al. (2002), cognitive biases have been shown to influence studies using explicit measures of agency, particularly when expected outcomes are associated with the individual's action. Second, while we followed well-established procedures, we note that an improvement on this procedure would consist in measuring the proprioceptive drift also during the trial in which the SoO onset time is assessed. This would allow for the computation of the correlation between proprioceptive drift and onset time, thus providing additional information with regard to the emergence of the illusion.
Conclusions
Active movement could influence bodily self-perception (Tsakiris et al., 2007b), so the effect of an auditory feedback pertaining to a self-produced action (in a congruent condition) should facilitate the development of a SoO by providing additional input to integrate with other sensorimotor information (Kalckert & Ehrsson, 2014). The results of the study presented here are congruent with this expectation. Overall, the results also suggest the presence of distinct cognitive pathways for SoO and SoA (Kalckert & Ehrsson, 2012), but also that they can influence each other (Newport et al., 2010; Tsakiris et al., 2010). Strengthening SoA seems to increase SoO, confirming the central role of action-related feedback in the degree of body awareness (Tajadura-Jiménez et al., 2015). Future research is however needed to gain a better understanding of how agency and ownership are related in bodily self-perception.
Footnotes
Author Contributions
Authors’ Note
Parts of these findings were presented at the AISC Midterm Conference 2019 (IMT School for Advanced Studies of Lucca, Italy), The Science of Consciousness (TSC) 2019 (Interlaken, Switzerland), and the AISC Conference 2021 (Eastern Mediterranean University Consortium - CUMO, Noto).
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.