
Abstract
The mass moment of inertia (MMoI) of a truncated conical shell is derived. The MMoI of a truncated conical shell, can be used to model the MMoI for other shapes; a conical shell, a tube, a disc and an annulus. Using the additive property of MMoI, the MMoI for a spherical shell, and a hemispherical shell can also be calculated.
The MMoI is evaluated using the Monte-Carlo method. Two variants of the Monte-Carlo method are derived, named No PAT method and PAT method, differentiated by whether the parallel axis theorem is combined with the Monte-Carlo method or not. The PAT method tends to be the more efficient algorithm.
This paper provides a partial framework for evaluating the MMoI for any axisymmetric body. It is proposed that the calculation of MMoI, for a truncated conical shell, and truncated cones can be used to develop student project activities. By way of examples of potential student projects, the calculation of the MMoI using the Monte-Carlo methods, for the Saturn V rocket, and an American football are demonstrated.
Introduction
The Monte-Carlo method is a stochastic approach, that can be applied to many physical and chemical processes, of interest to mechanical engineering students. At the author's university, the Monte-Carlo method is being introduced into the syllabus of an advanced undergraduate course including radiation heat transfer. Experience in implementing this change in advanced course curriculum, has indicated that students require further support in stochastic methods, before encountering radiation heat transfer. It is proposed to introduce the Monte-Carlo method to evaluate mass moment of inertia (MMoI) in an introductory course in mechanics where rotating systems are analyzed. 1
The mass moment of inertia is defined by the integral,

Where r is the perpendicular distance from the axis x-x to a point in the shape. Figure 1 shows parameters defining the MMoI for a general shape. In Figure 1, two axes are shown, labelled as x-x and G-G. The axes are parallel to each other, and the axis G-G intersects the center of mass of the shape. This is important as the parallel axis theorem states,

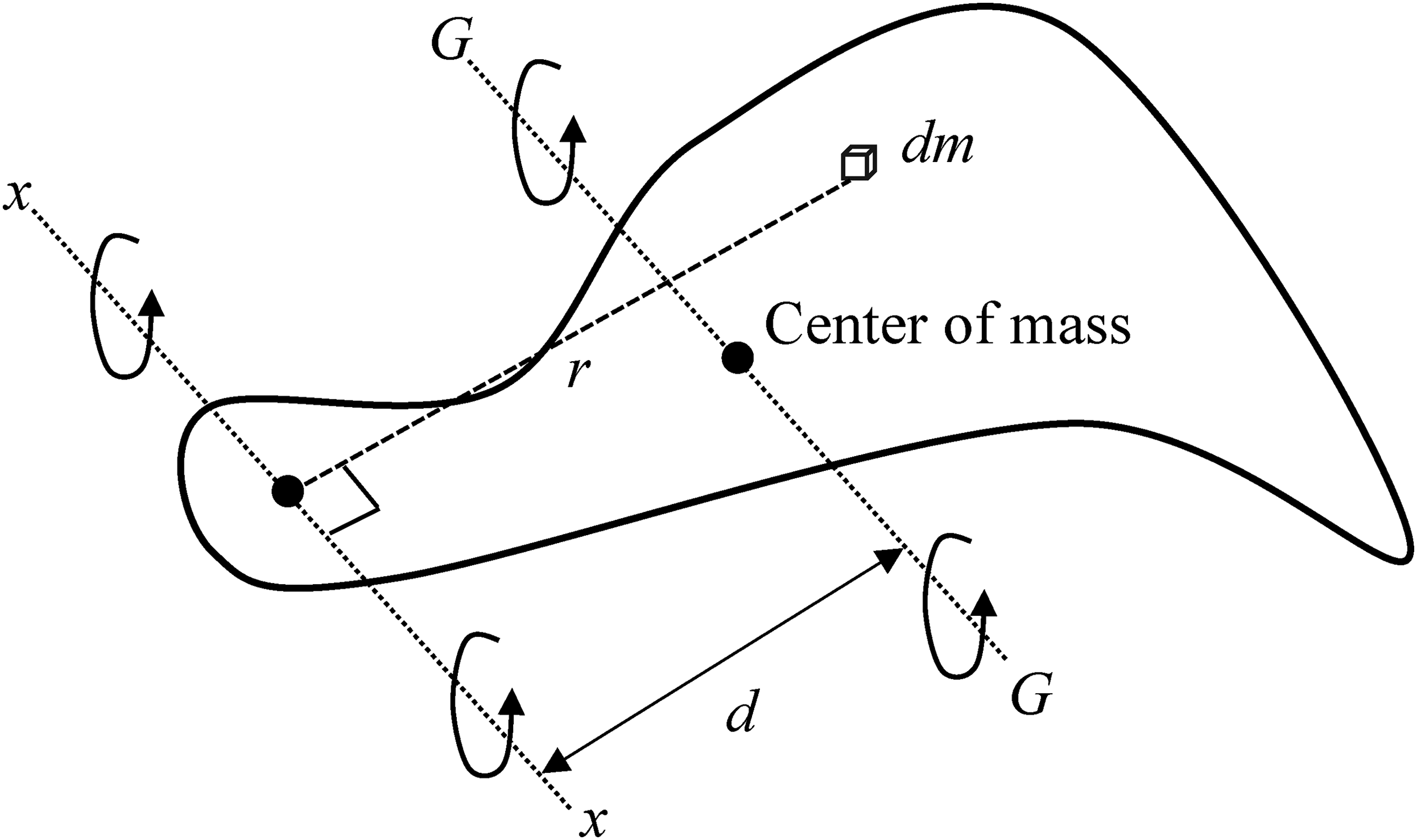
Schematic of a generic shape, the axis of rotation, x-x and the axis G-G through the center of mass.
Where d is the perpendicular distance between the two axes. For 3-dimensional shapes the generalized definition of the MMoI, (1) is a 3-dimensional integral.
In this paper the Monte-Carlo method is used to evaluate the MMoI for a truncated conical shell. This is a companion paper to a paper focused on the evaluation of MMoI of solid truncated cones. 2 The MMoI for a truncated conical shell in general cannot be found in textbooks on mechanics, and the second more powerful justification for this investigation is that many axisymmetric shell shapes can be represented as limiting cases of truncated conical shells, or as a composite of truncated conical shells. A wide range of axisymmetric shapes can be calculated based on a single Monte-Carlo method implementation. Taking the two papers together it is possible to calculate the MMoI for any composite axisymmetric shape based on a combination of truncated conical shells and truncated cones. This is considered below, with two possible student project-based applications of the analysis, to calculate the MMoI of the Saturn V rocket, 3 Appollo 10, and the MMoI of an American football. 4 The original idea for this paper is the use of the Monte-Carlo method applied to the view factor calculation of axisymmetric systems, where using a truncated cone representation of a range of primitive shapes has many benefits. 5
The advantages and disadvantages of the Monte-Carlo method compared to deterministic methods are given in
2
and will be considered only briefly. The Monte-Carlo method can be applied to many multi-dimensional physical and chemical processes.6–8 To understand the strengths and weaknesses of the Monte-Carlo method, its application to the evaluation of definite integrals will be used to illustrate the Monte-Carlo method basis.9,10 Consider the numerical quadrature of the 1-dimensional integral,

Extending the Monte-Carlo method to multi-dimensional integrals is straight forward. The Monte-Carlo method uses pseudo-random numbers to evaluate the integral kernel, f(x) multiple times. The realizations of the integral kernel are used to evaluate the mean value of the integral kernel. An approximation to the integral, is then given by multiplying the mean integral kernel by the range of the integral defined by the integration bounds.

Where n is the number of function evaluations. The stochastic nature of the Monte-Carlo method means that the central limit theorem applies.11,12 A corollary of the central limit theorem, is that for large sample sizes, the rate of convergence to the numerically exact value for the integral I is O(n−0.5). In general, this is a slower convergence rate than most deterministic numerical quadrature schemes, for low dimensional integrals. As the dimensionality of the integral increases, the convergence rate of the Monte-Carlo method improves relative to deterministic numerical quadrature schemes. 10 For deterministic methods, numerical quadrature is based on prescribing a lattice of points and requires a decision on the density of the lattice, Monte-Carlo methods do not have this requirement. Another advantage of the Monte-Carlo method, is the complexity of implementation does not increase significantly as the dimensionality of the problem increases.
In the literature the application of the Monte-Carlo method to the mass moment of inertia is restricted to calculating the mass moment of inertia for heterogeneous shapes with variable density shapes. 13 The Monte-Carlo method is well suited for calculating the MMoI for heterogeneous shapes as its extension to such systems is straightforward.
The Monte-Carlo method's application to calculate MMoI is a good starting point for learning how to program the Monte-Carlo method. When considering the MMoI calculation, there is a hierarchy of complexity of shapes from 1-dimensional simple shapes through to composite 3-dimensional shapes. This translates into a sequence of potential Monte-Carlo method implementations where it is possible to incrementally increase the complexity of problems solved.
In the engineering education research literature, most papers are focused on the demonstration of a range of experimental laboratories, where the objective is to measure the MMoI for a range of different shapes.14–16 This paper and the linked paper 2 are examples of the application of the Monte-Carlo method applied to the evaluation of the MMoI, and demonstrates how it is possible to produce project work for student self-learning. It is possible to develop learning material that allows students to implement the Monte-Carlo method in a programming environment such as MATLAB. 17 Using this analysis, students can investigate the numerical accuracy of Monte-Carlo methods, using numerical experimentation. In the next section, two Monte-Carlo methods applied to the evaluation of MMoI of truncated conical shells is presented. In section 3, the Monte-Carlo methods are applied to the evaluation of the MMoI for a range of axisymmetric shell-like shapes and axisymmetric 2-dimensional shapes. Section 4 shows two examples of the application of the analysis of this paper, and the linked paper 2 to possible student projects, that might have relevance to a student's own interests, the calculation of the MMoI of the Saturn V rocket, Apollo 10, 3 and the calculation of the MMoI of an American football. 4 Finally, the paper finishes with the conclusion where the main points of the paper are summarized.
Monte-Carlo method
In this section, the basis of the Monte-Carlo method, applied to the mass moment of inertia for axisymmetric bodies is presented. Two variants of the Monte-Carlo method are considered, the PAT method where the parallel axis theorem is used, and the No PAT method, where the mass moment of inertia about an axis of rotation through the base, IBB is calculated directly. In 18 a third Monte-Carlo method, labelled as the Envelope method, is presented. The Envelope method is simple to implement, but is not as efficient as the PAT method or the No PAT method. A second issue with the Envelope method is that simple shapes that make up a composite shape must have the same dimensionality. The Envelope method will not be considered further.
Monte-Carlo method applied to the MMoI of a truncated conical shell
The Monte-Carlo method, applied to the MMoI of a truncated conical shell will be presented in this sub-section. The basis of the No PAT method, will be given, followed by the extension to the PAT method. All axisymmetric bodies, can be approximated as a composite of truncated cones, and truncated conical shells. The mass moment of inertia, IBB,tc for an axis through the centerline, and the base, parallel to the plane defined by the base of the truncated conical shell, is presented below.
Parameters defining a truncated conical shell are given in Figure 2. The analysis is similar, but not the same as that for a solid truncated cone presented in.
2
The mapping of pseudo-random numbers in the unit interval, (Ras, Raφ)
i
are used to specify random points on the truncated conical shell, (zi, ri, φi). For the truncated cone, the axial coordinate dependency on pseudo-random numbers, is derived from the probability density function (PDF) for z directly. For a truncated conical shell, it is more useful to work with the co-ordinate s, defined by the curved surface of the truncated conical shell, as it allows more axisymmetric shapes to be defined as limiting cases of a truncated conical shell, see Figure 2. Considering the coordinate, s, as s increases, the circumference of the hoop on the surface of the shell, decreases linearly. This means that the PDF for s is,

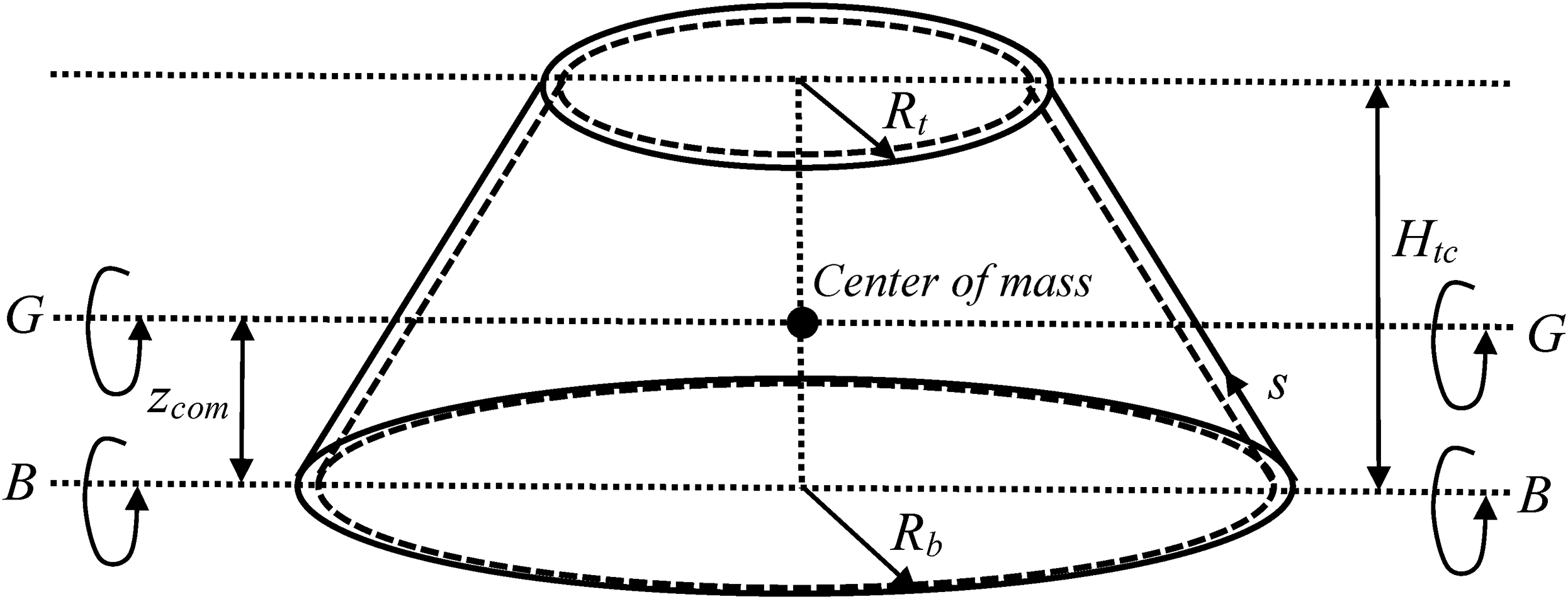
Parameters defining a truncated conical shell.
Where,

and noting that

substituting (6) into (5), integrating and rearranging gives the quadratic,


For convenience the coefficients in the quadratic are labelled as,

The two roots of the quadratic are easily found and the root in the unit interval is the correct one to take forward in the analysis.

The radial co-ordinate and the axial coordinate can be calculated.
The shape is axisymmetric about the z axis, thus the PDF is uniform and the relationship between the angle φ with respect to the x axis and the pseudo-random number Raφ is,

The point vector in Cartesian coordinates is,

The perpendicular distance from

This operation projects the line segment defined by the point vector
Projection of a truncated conical shell onto the plane y = 0, showing the calculation of perpendicular distance for a point and the axis of rotation B-B.
The perpendicular distance squared is then,

The approximate mass moment of inertia for the truncated conical shell using the No PAT method is,

To extend the above analysis for the PAT method. The Monte-Carlo method is applied to calculate IGG,tc, where G-G is a line parallel to B-B through the center of mass. The center of mass relative to the base is given by

The mapping from pseudo-random numbers, to points on the truncated conical shell is modified to,


The above modifications, to the analysis allow IGG,tc to be evaluated, using the Monte-Carlo method. The mass moment of inertia, IBB,tc is calculated by applying the parallel axis theorem.

Approximating the MMoI for other axisymmetric shells
In the appendix, the derivation of the mass moment of inertia for IBB,tc and IGG,tc are given as,


By taking certain limiting values defining the truncated conical shell, other axisymmetric shapes can be represented by the above expressions, and the Monte-Carlo basis can also be applied to the other shapes, with no modification.
The list of possible shapes with appropriate values for Rb, Rt and Htc are; a conical shell, a tube, a disc, and an annulus. Using the addition property of mass moments of inertia, a composite of truncated conical shells can approximate a hemispherical shell, and a spherical shell. The equations (18, 19) are applicable to all these shapes without modification. Without loss of generality (18, 19) are applicable for all values of Rb and Rt, for the Monte-Carlo method the only restriction is that Rb ≠ Rt. Note the strategy adopted, is to maintain the logic, and modify the parameters to produce approximate mass moments of inertia, with a negligible difference from the correct mass moment of inertia, rather than introduce branches into the logic to account for the separate shapes.
Conical shell specification
For a conical shell the parameter values are given as Rb = Rcone, Rt = 0 and Htc = Hcone, with these values the analysis produced for a conical shell is the same as for a truncated conical shell.

Where IBB,cs is the MMoI for a conical shell.
Tube specification
For a tube, the parameter values are set to Rb = Rtube, Rt = Rb-ε and Htc = Htube. This will produce an approximate mass moment of inertia using the truncated cone analysis. The parameter ε is positive, and indicates a small perturbation of the base radius to ensure that



Where IBB,tube,tc is the MMoI for a truncated conical shell approximating a tube.
2-Dimensional disc
For a 2-dimensional disc the parameter values are set to, Rb = Rdisc, Rt = 0 and Htc=0. The mass moment of inertia for a truncated conical shell is exact for a disc. Applying the Monte-Carlo methods, the No PAT method and PAT method described above, can be applied directly to the representation of a disc, as the co-ordinate of the curved surface of the truncated conical shell, s is applicable without modification.

2-Dimensional Annulus
For a 2-dimensional annulus, the parameter values are set to, Rb = Ro, Rt = Ri and Htc=0. The mass moment of inertia for a truncated conical shell is exact for an annulus. Applying the Monte-Carlo method, the No PAT method and PAT method, described above can be applied directly, to the representation of an annulus as the co-ordinate of the curved surface of the truncated conical shell, s is applicable without modification.

Hemispherical shell and spherical shell
Any axisymmetric shell, can be approximated as a composite of truncated conical shells. For example, for a hemispherical shell, it can be partitioned into a conical shell at the apex of the hemisphere, and (n-1) truncated conical shells below it, see Figure 4. The bigger n is, the more accurate the representation of the hemispherical shell. The same approximation with 2 conical shells for the top and bottom of the spherical shell, and (n-2) truncated conical shells between them also works. An appropriate value for n must be chosen. The conical shells are modelled as truncated conical shells with Rt = 0. The approximate mass moment of inertia is then,


Different partitions of a hemispherical shell using truncated conical shells and a single conical shell, a) 1 partition, b) 2 partitions, c) 4 partitions.
Where Ntc is the number of truncated conical shells. The parameters for each truncated conical shell are,




Application of the Monte-Carlo method to calculating MMoI
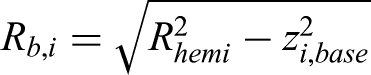
In this section, the two Monte-Carlo methods are evaluated, by considering a number of axisymmetric shells and 2-dimensional axisymmetric shapes. The test problems chosen to evaluate the Monte-Carlo methods mirror the test problems considered in the linked paper. 2 The No PAT method, and PAT method can be evaluated, for the evaluation of MMoI of axisymmetric shells, and compared to the performance of the two methods, applied to axisymmetric solid shapes considered in. 2 The parameters defining each of the shapes are given in Table 1. The first shape considered is a truncated conical shell.
Mass moment of inertia shapes and performance parameters.
Truncated conical shell
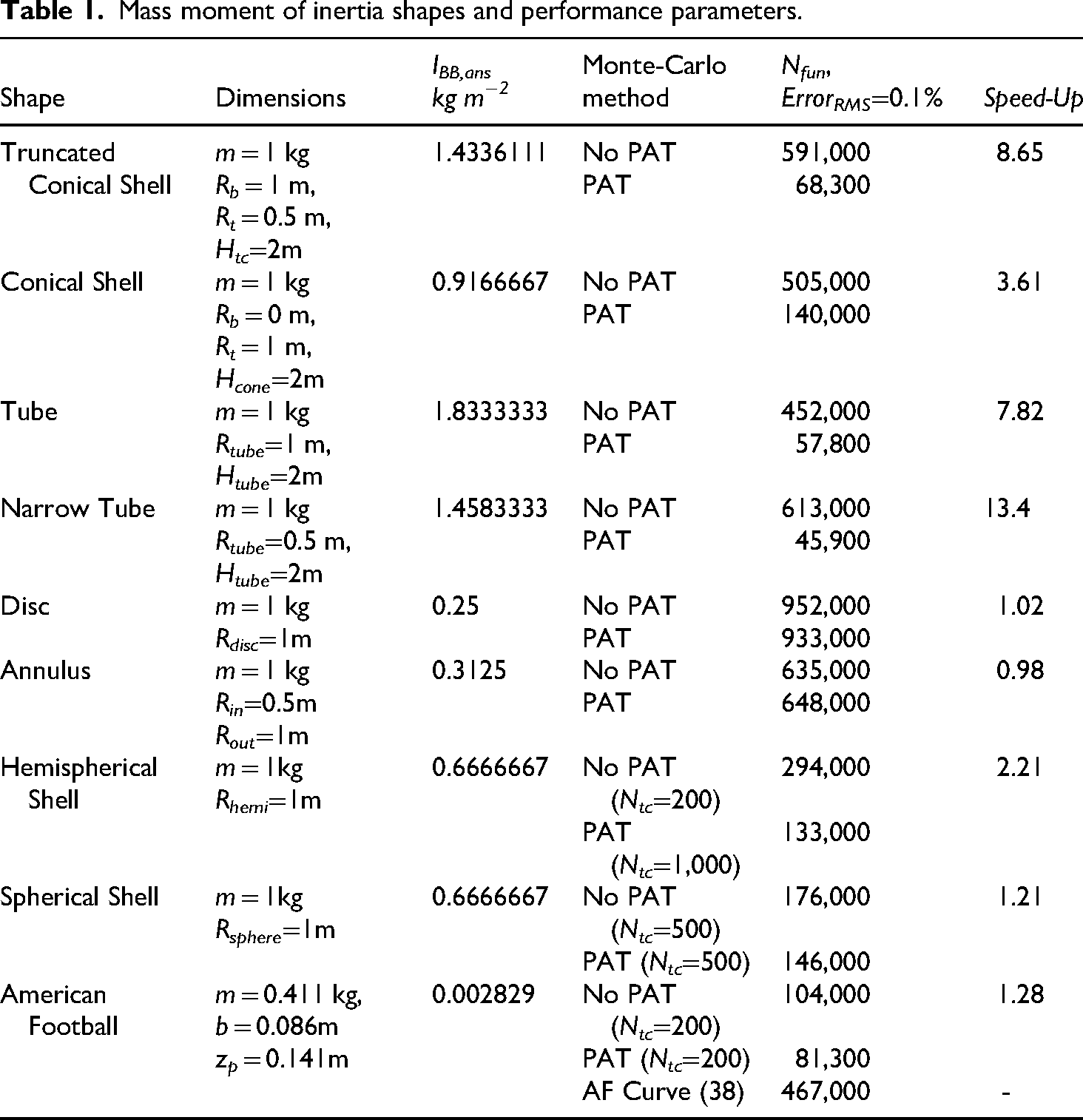
A truncated conical shell, is defined to have a mass of m = 1 kg, a base radius of Rb = 1 m, a top radius of Rt = 0.5 m, and the height Htc varies from 0.25 m to 2 m step 0.25 m, see Figure 2. The estimates of IBB,tc are evaluated, using the No PAT method and PAT method, with Nfun=100 function evaluations. Figure 5, shows IBB,tc curves, calculated using the two Monte-Carlo methods and the analytical solution, (18). As Htc increases the MMoI increases, as expected. Comparing the two Monte-Carlo methods the PAT method looks to be marginally more accurate than the No PAT method. The difference between the two methods, is less than that demonstrated for the solid truncated cone test problem, with the same defining parameters, see Figure 5 in. 2 For the truncated conical shell, the average relative error for the No PAT method and the PAT method are 4.2% and 5.1% respectively.
For the truncated conical shell, IBB vs. Htc, the analytical solution, and the No PAT and PAT method predictions for Nfun=100.
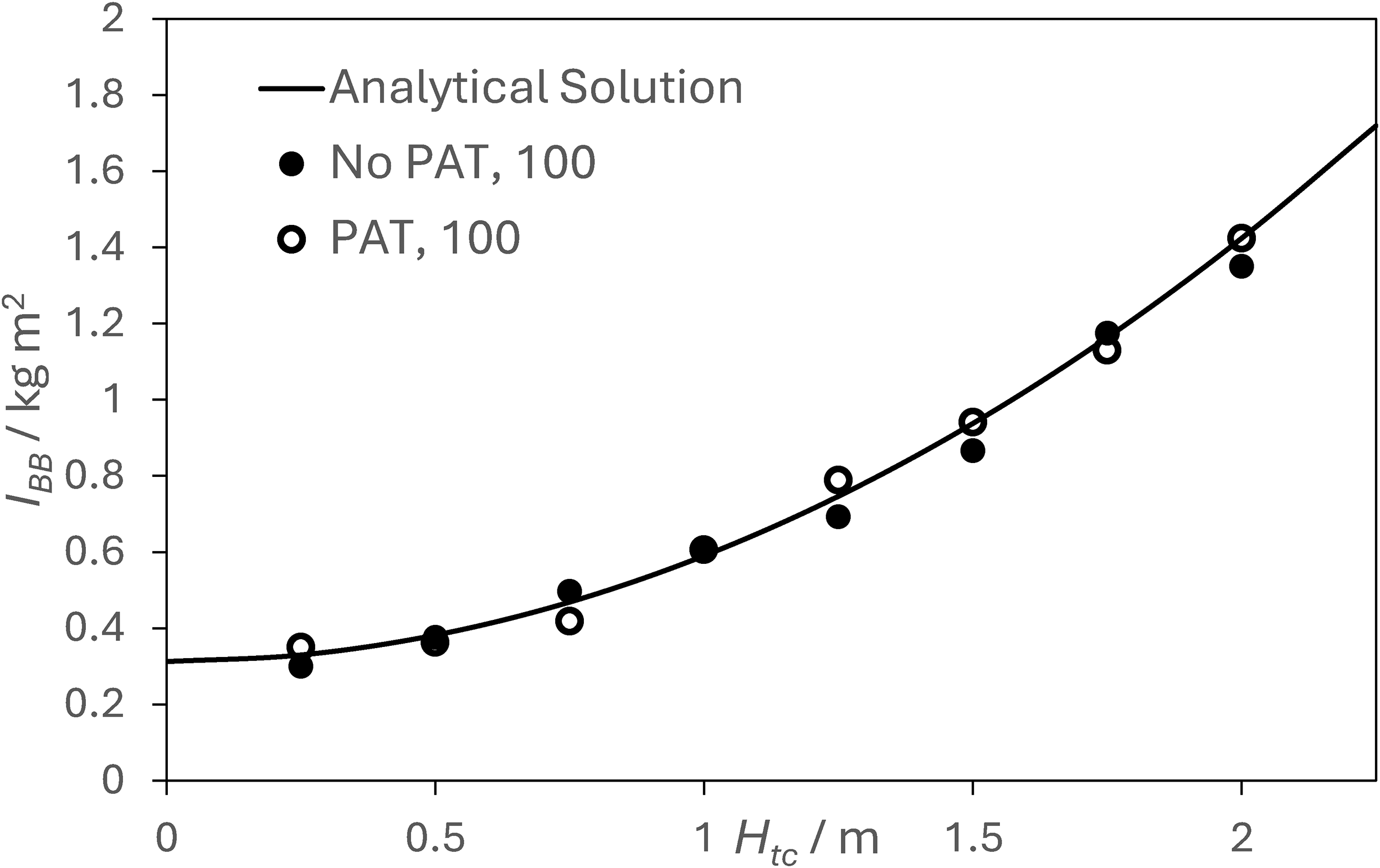
Defining the root mean squared relative error, ErrorRMS as,

Where Nsample is the number of realizations of IBB,tc for a given Nfun. IBB,j denotes a single realization of the MMoI, and IBB,i is an estimate of MMoI calculated with Nfun function evaluations. Twenty samples are sufficient, to give a relatively smooth ErrorRMS vs. Nfun curve, Nsample =20. Figure 6, shows the ErrorRMS vs. Nfun curve for
ErrorRMS vs. Nfun, for a truncated conical shell, m = 1 kg Rb = 1 m Rt = 0.5 m, Htc=2 m calculated using the No PAT and PAT method.
To quantify the difference, in the two ErrorRMS curves, the number of function evaluations to achieve a relative error ErrorRMS =0.1% is used.
Using ErrorRMS =0.1% is an arbitrary value, but it is still useful, and allows a speed up parameter to be defined,
For the truncated conical shell, the MMoI calculated using the No PAT method with an accuracy of ErrorRMS =0.1% is Nfun,0.1% = 591,000 and for the PAT method Nfun,0.1% = 68,300. This gives a speed-up value of SP = 8.65. All of the data for this test problem are summarized in Table 1.
Tube
The second shell-like shape considered in this investigation is the MMoI of a tube with axis of rotation through its base perpendicular to the tube. The tube is defined by the parameters, m = 1 kg, Rtube = Rb = 1 m, Rt = Rb-ε, Htube = Htc=2 m, see Table 1. An analogous calculation for a solid cylinder, with the same defining parameters is considered in.
2
The parameter ε needs to be given an appropriate value. To determine ε, a number of No Pat method MMoI simulations with Nfun=107 and
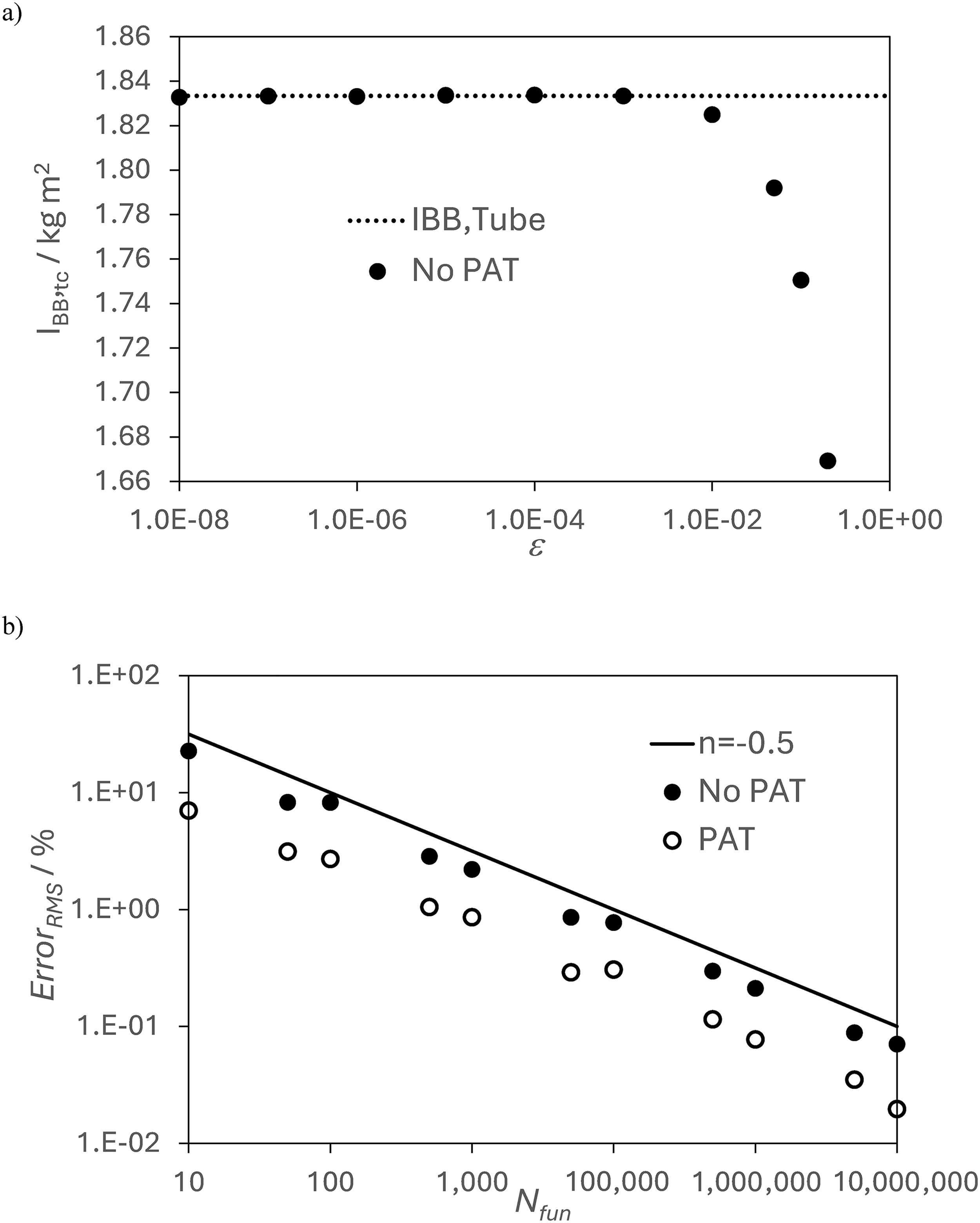
For the tube shape, a) IBB,tc vs. ε, for the No PAT method, with Nfun=107 and the analytical solution and b) ErrorRMS vs. Nfun for the No PAT and PAT method for IBB,tc and a power law curve with index n = -0.5.
Figure 7(b), shows a comparison of the ErrorRMS vs. Nfun for the tube, using the No PAT method and the PAT method together with a power law curve, with power law index n = -0.5. The behavior is similar to that exhibited in Figure 6, for the truncated conical shell. For the tube, the number of function evaluations to achieve ErrorRMS=0.1% for the No PAT method and the PAT method are Nfun,0.1% = 452,000 and Nfun,0.1% = 57,800 respectively. This gives a speed-up of SP = 7.82.
A similar set of calculations have been completed for a narrow tube defined by the parameters m = 1 kg, Rtube = Rb = 0.5 m, Rt = Rb-ε, Htube = Htc=2 m. The number of function evaluations to achieve an error, ErrorRMS=0.1% for the No PAT method and the PAT method are Nfun,0.1%=613,000 and Nfun,0.1%=45,900 respectively. For the narrow tube shape the speed-up is SP = 13.4. The speed-up for the PAT method, increases as the aspect ratio (Htube/Rtube) of the tube increases, as the integral kernel variation for the MMoI IGG,tc is less than the variation for the MMoI for IBB,tc. This situation has been analyzed for a rod in.
2
If the internal kernel of (1) for a 1-dimensional shape is denoted f, then the variance for a function is
The smaller the variance, the fewer function evaluations are required to achieve an accurate value, for the mean of the integral kernel. The extreme case, is for a constant integral kernel the variance is zero, and one function evaluation gives the exact mean for the integral kernel.
Hemispherical shell
In this sub-section, the Monte-Carlo method, is applied to the MMoI of a hemispherical shell, with an axis of rotation through the base. The parameters defining the hemispherical shell are, m = 1 kg and Rhemi = 1 m. The solution strategy, is to represent the hemispherical shell as a composite of truncated conical shells (24). For the truncated conical shell, at the apex of the hemispherical shell Rt = 0. The approximation to the mass moment of inertia IBB,hemi, is given as the summation,
For this shape, the number of truncated conical shells, Ntc needs to be sufficiently large.
Figure 8(a), shows the calculated MMoI using the No PAT method and the PAT method. Each of the calculated MMoI, is evaluated with Nfun,total=107, such that the dominant component of the numerical error, is associated with the representation of the hemispherical shape, Ntc. In Figure 8(a), the Monte-Carlo method evaluation of the MMoI is plotted against Ntc, 
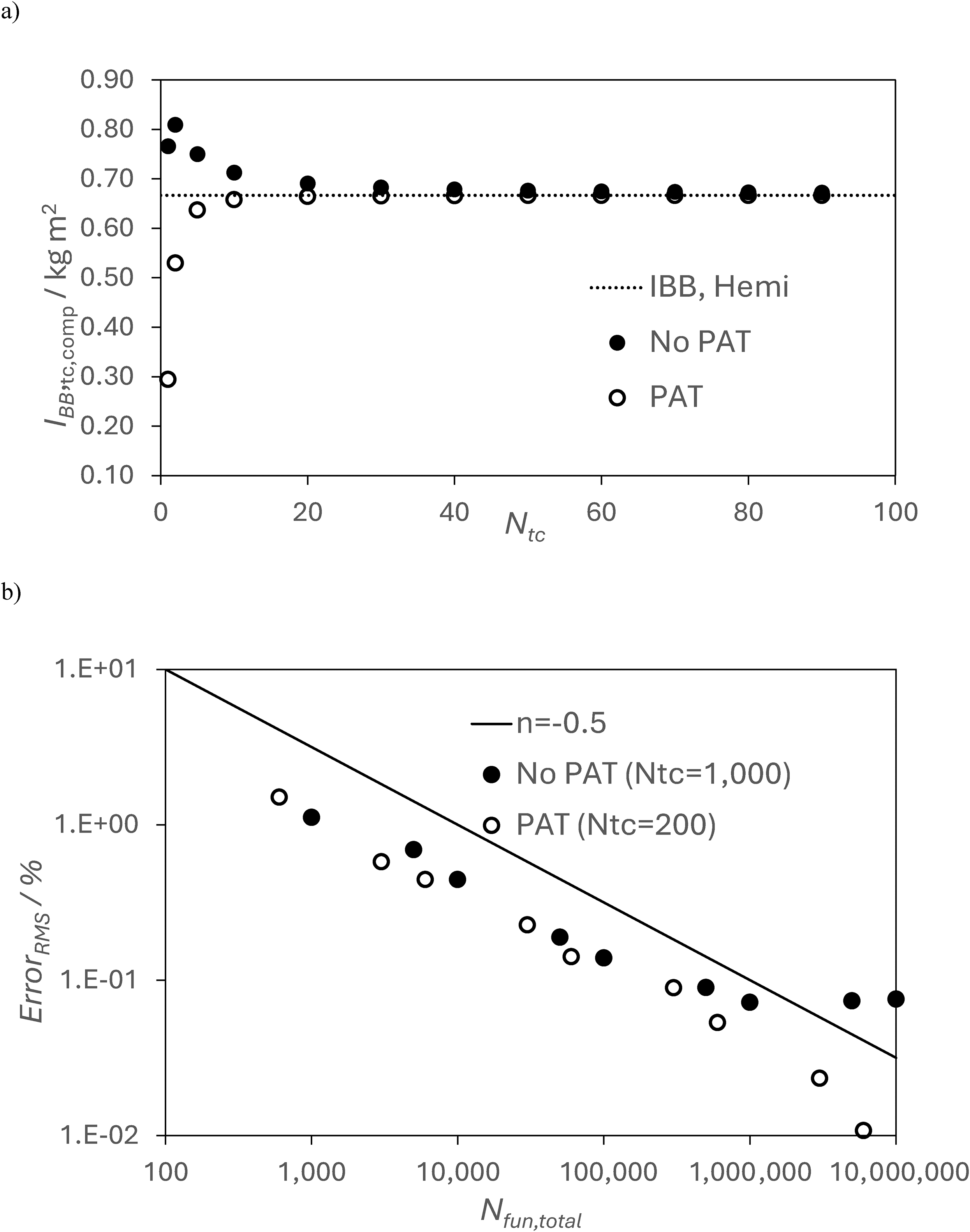
For the hemispherical shell a) IBB,tc, vs. Ntc, for the No PAT method and PAT method, with Nfun=107 and the analytical solution and b) ErrorRMS vs. Nfun, for the No PAT and PAT method and a power law curve with index n = -0.5.
Figure 8(b), shows a comparison of the ErrorRMS vs. Nfun,total for the No PAT method, and the PAT method, as well as the power law curve with a power law index n = -0.5. For the No PAT method, the hemispherical shell is represented as Ntc=1,000 truncated conical shells and for the PAT method Ntc=200. These values for Ntc were determined, to ensure that it is possible to calculate an ErrorRMS curve, such that the number of function evaluations to achieve ErrorRMS =0.1% is possible. The PAT method is marginally more accurate than the No PAT method. The No PAT method ErrorRMS curve plateaus for Nfun,total≥106 at a value of ErrorRMS just below 0.1%. If a more accurate value for ErrorRMS is required, then Ntc would have to be increased. The number of function evaluations to achieve an error of ErrorRMS =0.1% for the No PAT method, and the PAT method are Nfun,total,0.1%=294,000, and Nfun,total,0.1%=133,000 respectively. This gives a speed up of SP = 2.21.
Conical shell, spherical shell, disc and annulus
The shapes considered in this sub-section are; a conical shell, a spherical shell, a disc, and an annulus. Each of the shapes defining parameters are given in Table 1. The different Monte-Carlo methods, the No PAT method, and the PAT method are evaluated, using Nfun,0.1%, the number of function evaluations to achieve an error of ErrorRMS=0.1%. For the conical shell, the No PAT method and the PAT method are Nfun,0.1%=505,000 and Nfun,0.1%=140,000 respectively, and the speed up parameter is SP = 3.61.
For the other three shapes the PAT method either has a similar performance to the No PAT method or is marginally superior. For the disc, and annulus, zcom=0 and theoretically IBB = IGG. Any differences in the data presented in Table 1, for these two shapes are associated with stochastic effects.
Taking the MMoI of the shapes, that can be defined as a limiting case of a truncated conical shell, or truncated cone 2 suggests that in general the PAT method tends to be more efficient than the No PAT method provided zcom>0. It is difficult to quantify the likely improvement in efficiency, of the PAT method compared to the No PAT method, except that the greater zcom is, the more likely the improvement is significant. It is now possible, to apply the analysis presented here, and in 2 to evaluate the mass moment of inertia, of any axisymmetric shape. This is considered further in the next section.
Examples of student projects for the calculation of MMoI of axisymmetric bodies
The Monte-Carlo methods developed for the calculation of axisymmetric shapes, are quite complicated to derive, and are beyond most undergraduate mechanical engineering students, except for the most able. The educational value of this investigation, is that once the Monte-Carlo method calculation of the MMoI of a truncated cone and truncated conical shell is implemented, then a student can take the software and compute the MMoI of any axisymmetric shape, in any field of engineering of interest to them. This means that students can be given instructions to find an axisymmetric shape in a field of engineering of interest to them. The student can then complete a numerical experimental investigation using the Monte-Carlo method, to calculate the MMoI of the axisymmetric shape.
In this section, two examples are given, of what a student project might look like, one taken from rocket design and a second taken from sports science.
Estimating the MMoI of a Saturn V rocket (Apollo 10)
The Saturn V rocket is a 3-stage rocket, for launching the Apollo missions to the moon, in the late 1960s and early 1970s. The rocket is 111 m tall, and at launch the mass of the rocket, propellant and payload is approximately
The rocket has three stages. Stage S-IC, the first stage has five rocket engines. On ignition all five rocket engines are powered up. After 2 min, 15 s the central engine is switched off. This is done to limit acceleration to less than 4.5 g. The four remaining engines deliver full thrust up to a time of 2 min, 41 s after launch. At this point, the first stage separates and the second stage, Stage S-II has five rocket engines delivering full thrust up to a time of 7 min, 39 s after launch. At this time, the center engine is switched off to limit acceleration. The remaining four engines continue to produce thrust until a time of 9 min 14 s after launch. The second stage is then jettisoned. The final third stage, Stage IVB has a single rocket engine. The third stage engine ignition occurs at 11 min, 14 s after launch. The stage IVB engine is switched off at a time of 11 min 53 s, when the Saturn V rocket is put into a parking orbit approximately 185 km above the earth's surface, before the Saturn V rocket engine sometime later moves on to the second part of the mission to orbit the moon.
The objective of the student project, is to approximate the mass and mass distribution of the Saturn V rocket for the time between launch and achieving a parking orbit around the earth. The Saturn V rocket is shown in Figure 9. The itinerary of components of a Saturn V rocket is documented in some detail.3,19 There are too many structures / equipment to be defined individually, in an approximation of the mass distribution, to calculate the MMoI of the Saturn V rocket. The simplest representation of the mass distribution to represent a Saturn V rocket is 7 components. Stage S-IC is approximated to be a cylindrical shell surrounding a cylinder of propellant. The rocket fuel and liquid oxygen are considered as a single fluid, the propellant, and is modelled as a solid cylinder with the mass of propellant reducing with time. Stage S-II is represented as a cylindrical shell for the main body, and a solid cylinder for the propellant. For Stage S-IVB the main body and propellant have a similar representation to the other two stages. The final component of the Saturn V idealized representation, the command module / payload is modelled as a cylindrical shell, on top of the Stage S-IVB. All the dimensions of the rocket stage defining parameters, are stated in the Apollo 10 Technical Information Summary. 3 The propellant tanks have the same mass as stated in the summary document, but the fuel/oxygen tanks are assumed homogeneous and have a cylindrical shape, with the correct mass and volume. The location and dimension of the seven idealized components of the Saturn V rocket are given in Table 2. The location of the base of each component relative to the base of the rocket is shown in Figure 9.
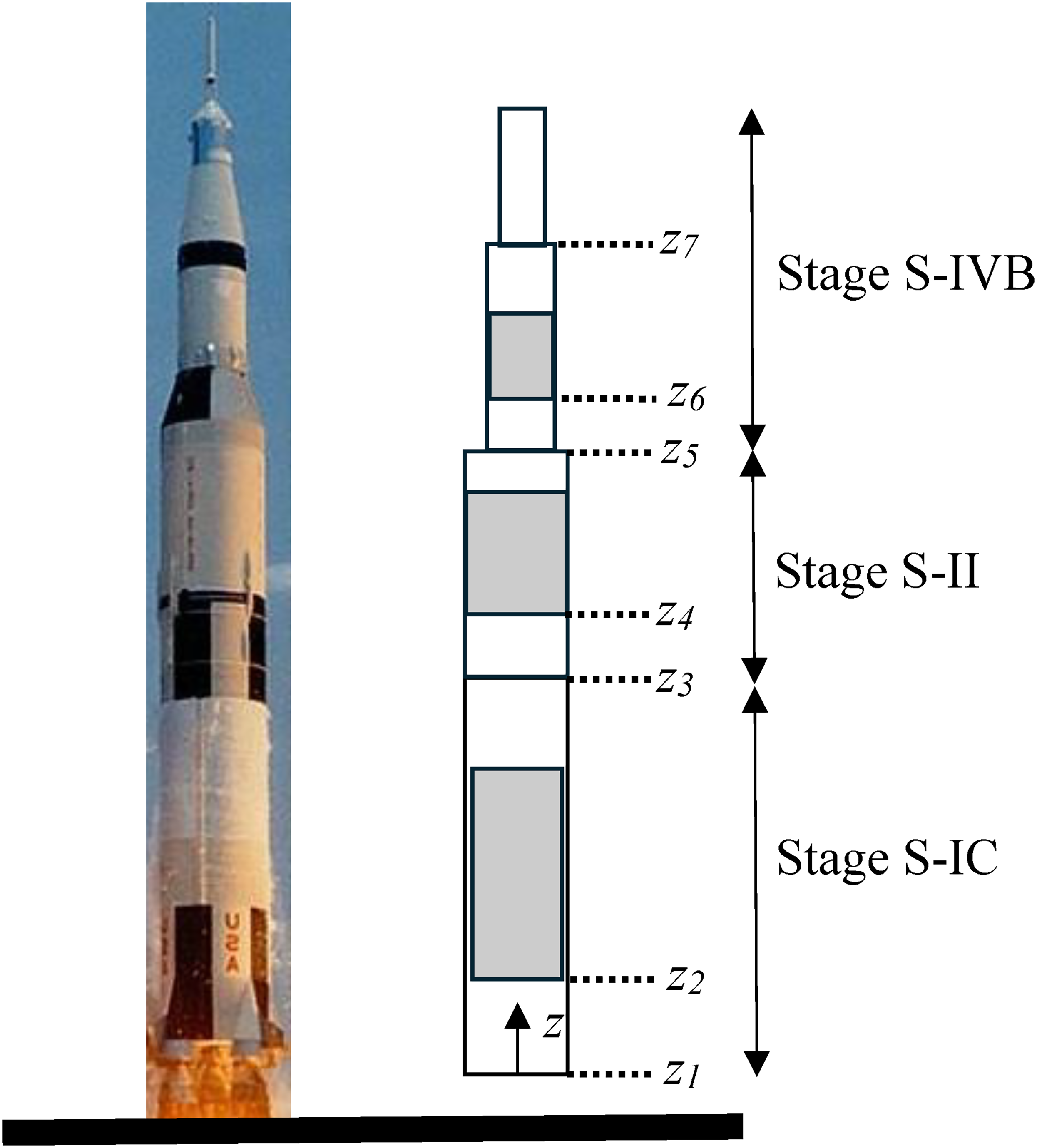
Saturn V rocket*, 3 and a seven-component approximation to a Saturn V rocket.
Saturn V rocket dimensions
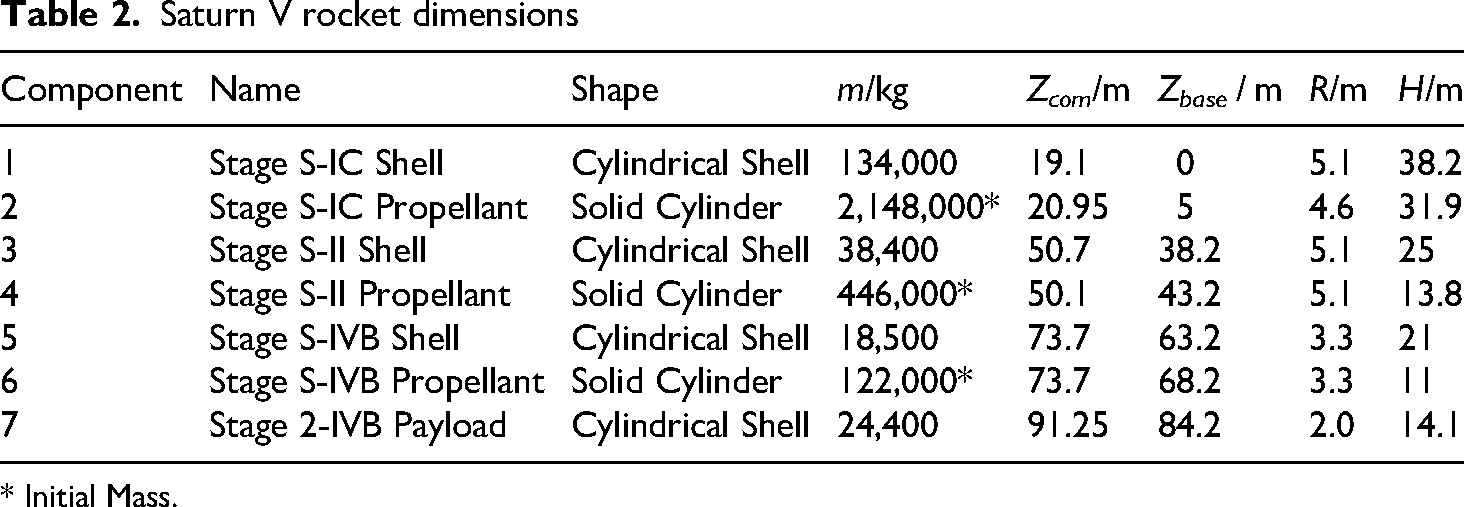
* Initial Mass.
The mass of the Saturn V rocket for the first 675 s after launch is shown in Figure 10(a). The Stage S-IC/ S-II separation occurs at t = 161 s, and the Stage S-II/ S-IVB separates at t = 555 s. Figure 10(b), shows the center of mass of the Saturn V rocket between launch and achieving a parking orbit around earth.
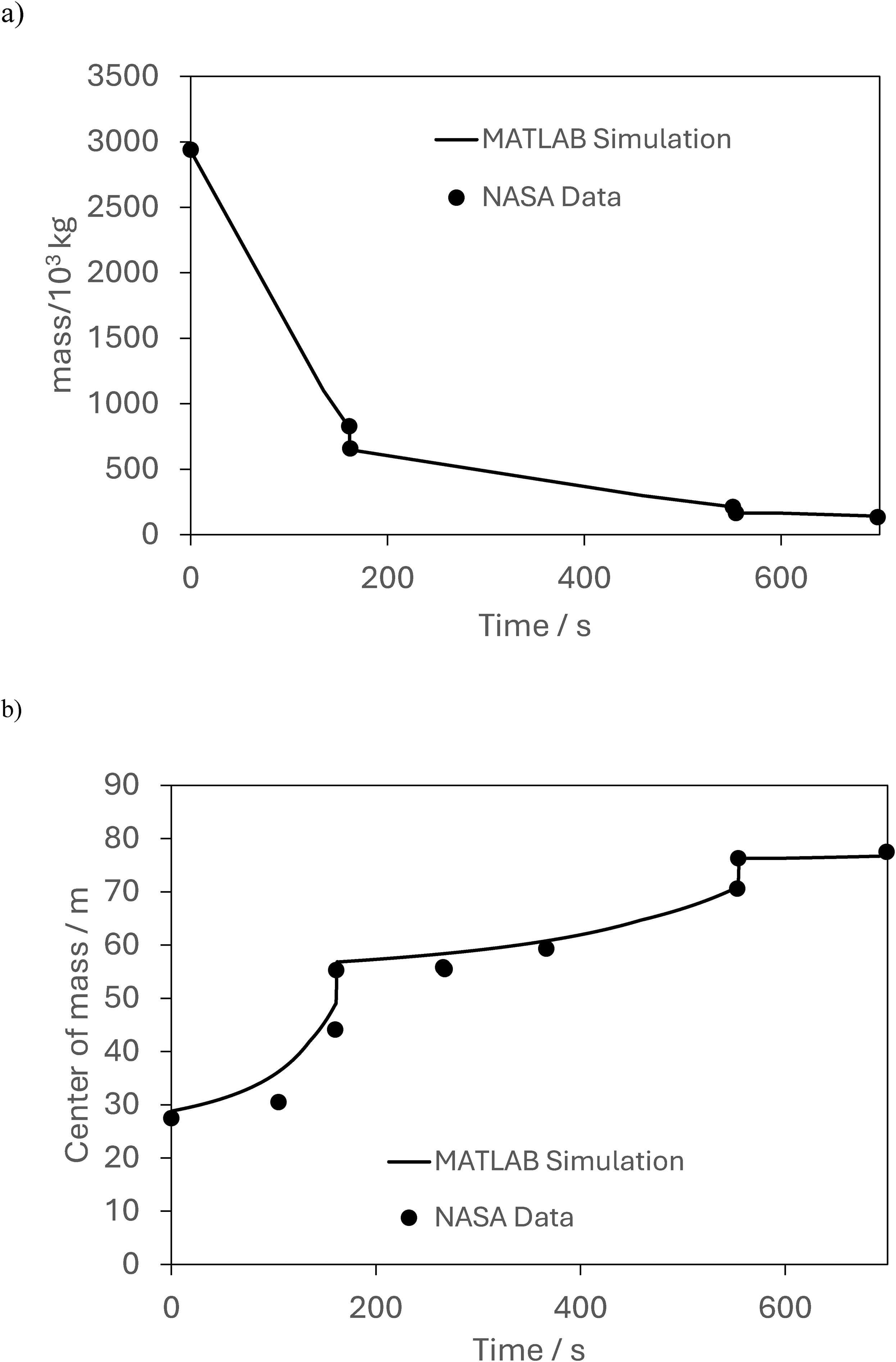
a) Mass of Saturn V rocket vs. time and b) Center of mass of Saturn V rocket vs. time.
The points in Figure 10(b), are the center of mass of the Saturn V rocket given by NASA. 3 The full line, is the center of mass, calculated in a MATLAB simulation of the 7 component idealized representation of the Saturn V rocket. Comparing the NASA data with the MATLAB simulation of the center of mass, they are in close agreement with each other. The largest error occurs at t = 105 s, where the relative difference is 15% with a much smaller error for all other times.
The mass moment of inertia for the Saturn V rocket is shown in Figure 11, for
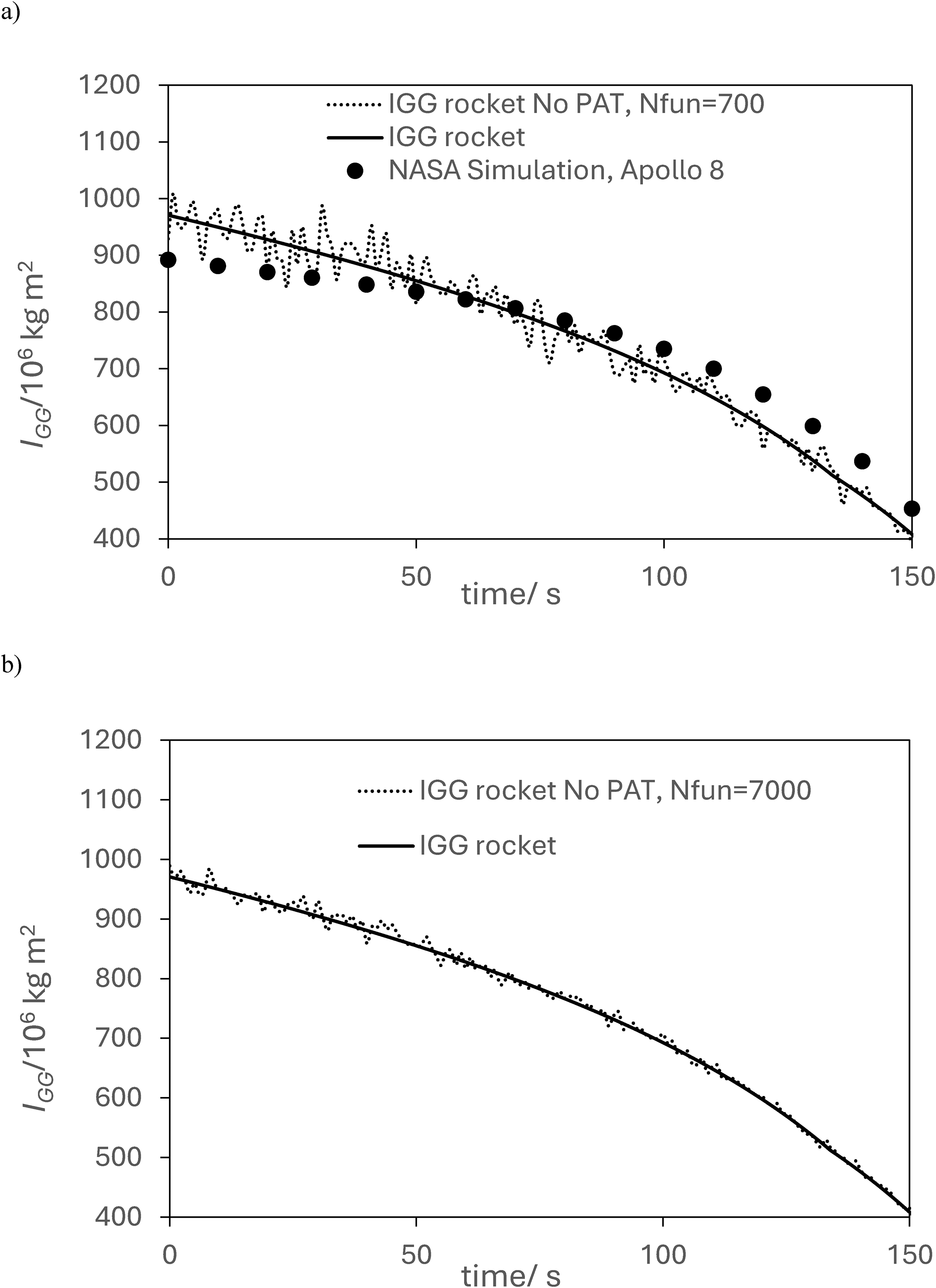
MMoI for the approximate Saturn V rocket shape and a), the no PAT method and a NASA simulation of appollo 8 and b) the PAT method.
By way of comparison between the No PAT method applied to the Saturn V rocket, Figure 12(a), shows the relative error in the MMoI, IGG,No PAT calculated using Nfun,total=700, and Nfun,total =7,000. The maximum relative error for the No PAT method is approximately 9% for Nfun,total =700 and reduces to 3% for Nfun,total =7,000. Figure 12(b), shows a similar relative error curve for the PAT method. The maximum relative error for the PAT method is approximately 4% for Nfun,total =700, and reduces to 1% for Nfun,total =7,000.
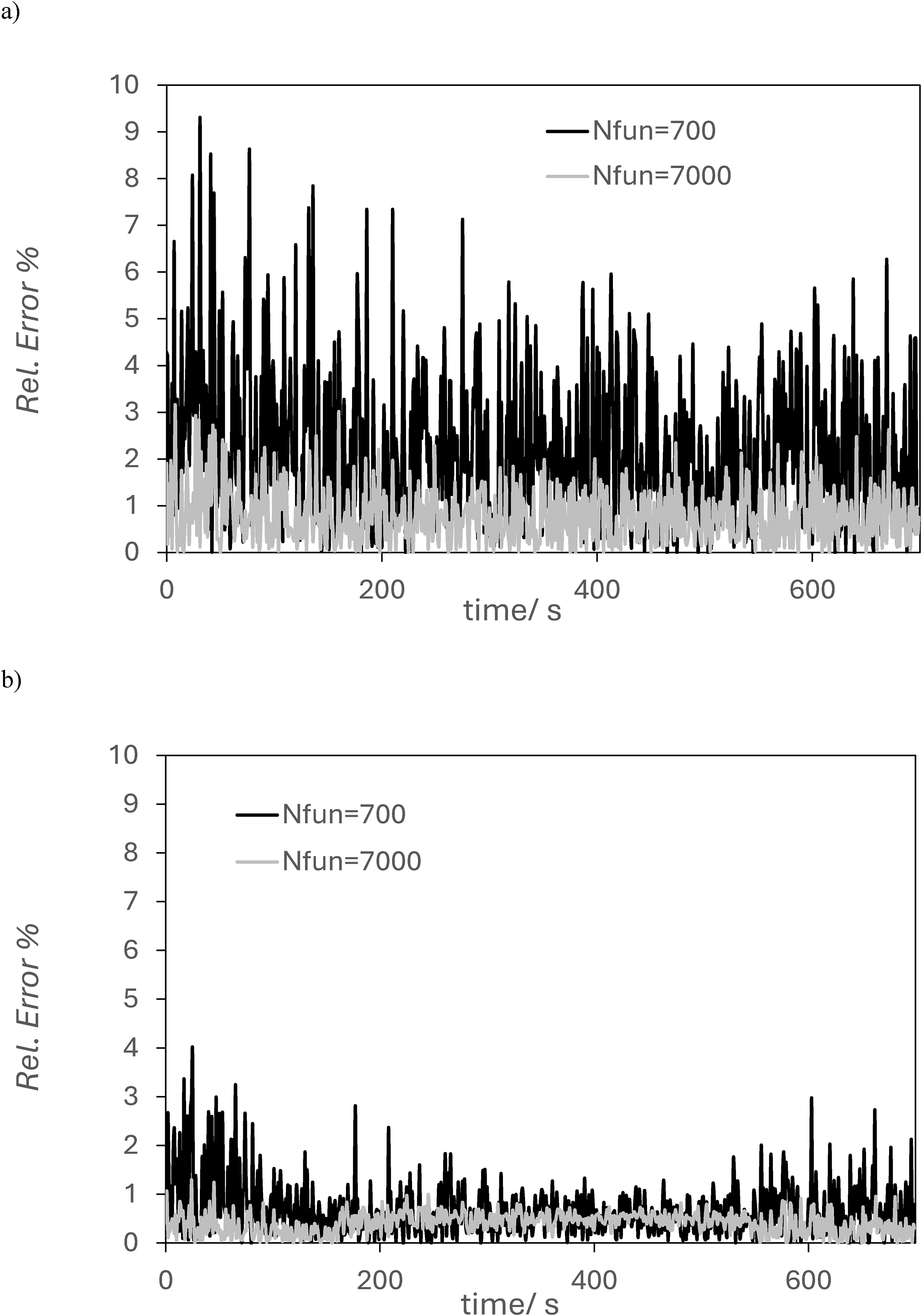
The relative error of the MMoI for a Saturn V rocket for a) the no PAT method, and b) the PAT method.
Calculating the MMoI of an American football
In this section, the mass moment of inertia of an American football, for an axis through its center of mass, parallel to its minor axis is considered, see Figure 13. This is the mass moment of inertia of an American football, required to determine the angular acceleration of the ball, due to a torque applied by the hands of the player. This is of interest due to the seemingly paradoxical dynamic behavior of a thrown American football. Once released by a player, the American football follows a parabolic trajectory. During the flight the major axis of the rotating balls trajectory, tends to remain aligned with the major axis of the ball. This is unexpected, as you might expect the American football to have a tendency to pitch backwards, rotating vertically about its minor axis. The reason for the possible rotation about the minor axis, is because of drag force on the American football inducing a torque, τpitch.
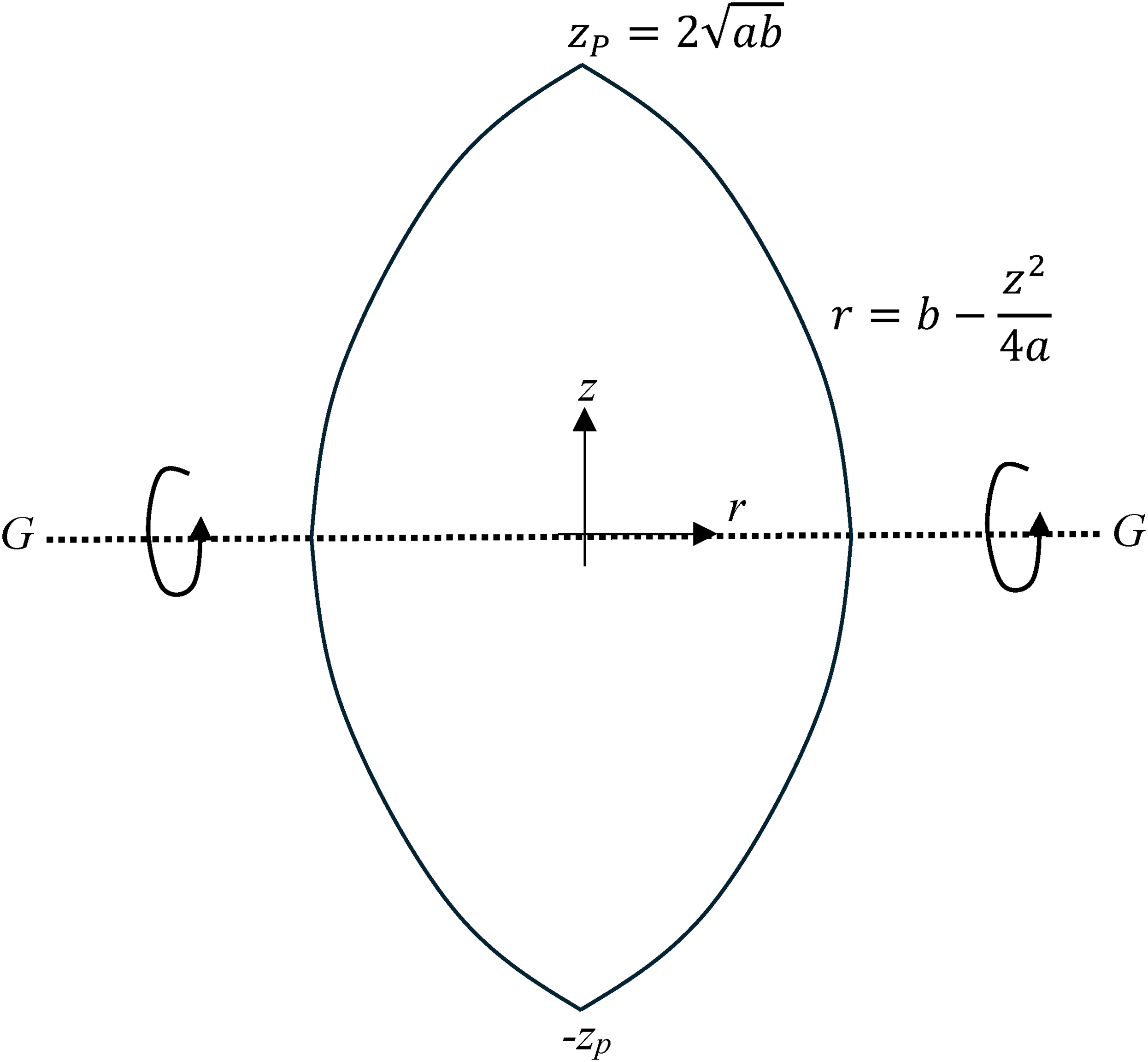
Schematic of an American football.
Where
The parameters defining an American football are given in. 4 The American football is taken to be an axisymmetric shell, with a parabolic profile,

Where
The Monte-Carlo methods, No PAT method and PAT method are applied to the American football by representing it as a composite of truncated conical shells, and two conical shells at the apexes of the ball. After some numerical experimentation, an appropriate number of axisymmetric components is Ntc=200. The ErrorRMS vs. Nfun for the two Monte-Carlo methods, No PAT method and PAT method, are shown in Figure 14. Figure 14, shows that the PAT method is marginally superior to the No PAT method. The number of function evaluations to achieve an error, ErrorRMS=0.1%, for the No PAT method, and PAT method is Nfun,0.1%=104,000 and Nfun,0.1%=81,300 respectively, the speed-up is SP = 1.28. These results are consistent with the performance of the two Monte-Carlo methods, applied to a spherical shell. The ErrorRMS curve labelled “AF curve (38)” in Figure 14 is discussed below.
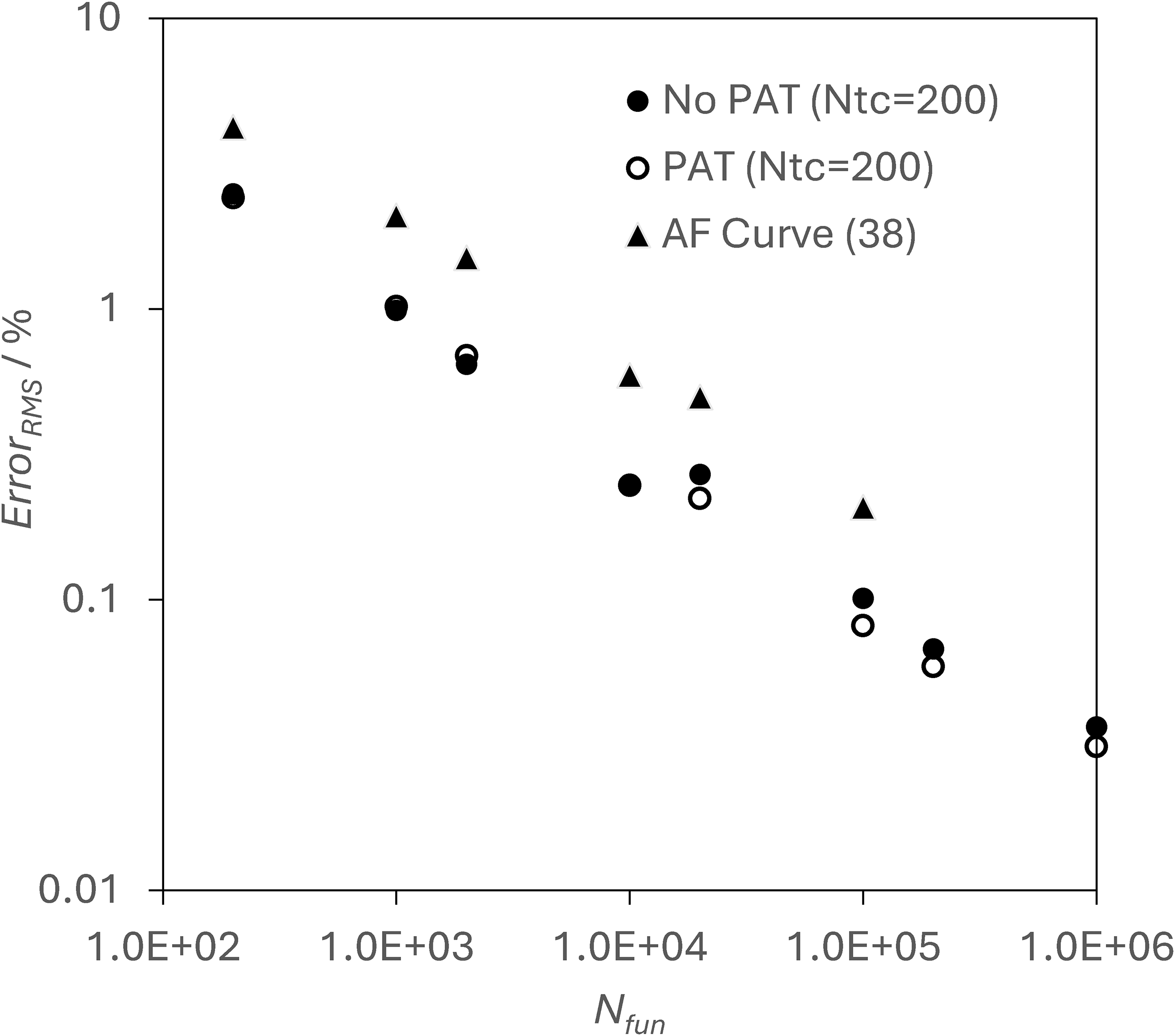
ErrorRMS vs. Nfun, for the MMoI of an American football calculated using the No PAT method, the PAT method and the Raz vs zi curve fit (38).
It is interesting to compare the performance of the Monte-Carlo methods, applied to the American football example, where the analytical curve of the surface profile (34), is used verses when the shape is represented as a composite of truncated conical shells. For the Monte-Carlo method based on (34), the mapping for the z coordinate to the pseudo-random number, Raz is given implicitly as,
The differential element, ds and the integration bounds relate to the coordinate, s defined to be the coordinate along the curvature of the American football. The integration is changed to be in the direction of the z coordinate direction.
Using (34) to substitute for r and 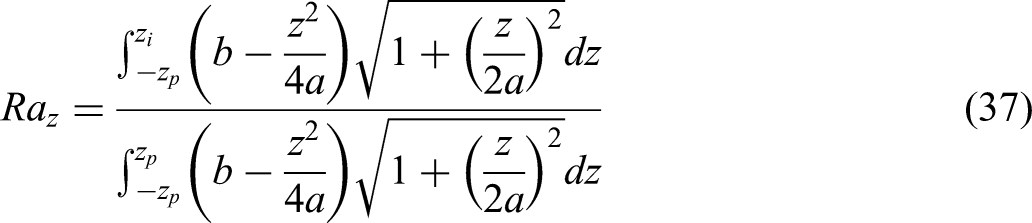
To take the analysis further, requires evaluating the two integrals in (37), and then rearranging the equation such that the subject of the equation is zi. This is not easily accomplished, an alternative route is to evaluate the integrals numerically, and then to calculate a composite curve fit to the equation defined implicitly by (37),
The functional relationship between Raz and zi is shown in Figure 15. Due to the symmetry about the axis of rotation G-G, of an American football see Figure 13, it is sufficient to provide a curve fit for (37) for 

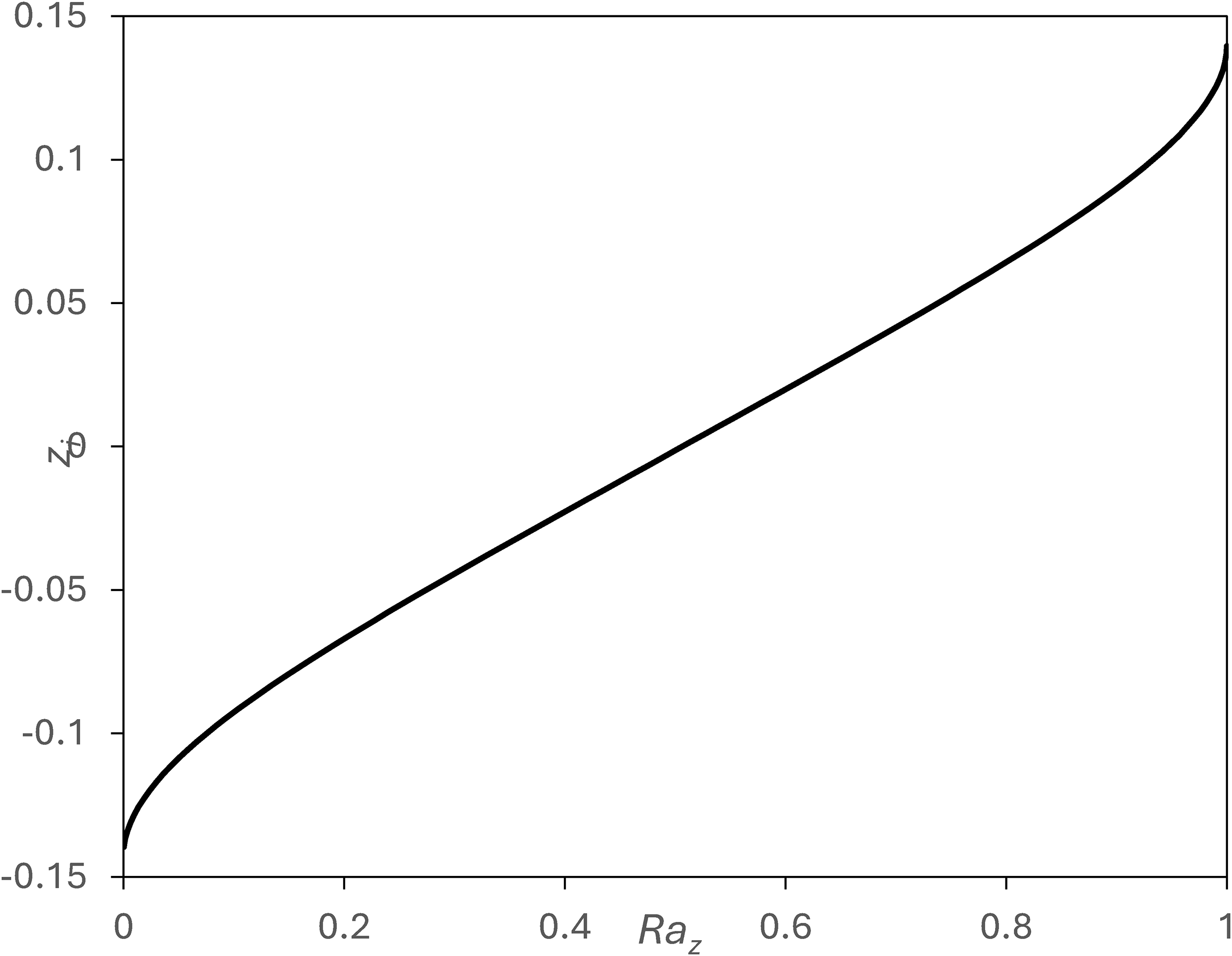
The mapping from the pseudo-random number Raz to the axial coordinate, zi of an American football.
Figure 14 shows the Monte-Carlo method ErrorRMS curve using the curve fit (38), labelled as AF curve (38). ErrorRMS is only calculated for
Conclusion
In this paper, the mass moment of inertia for a truncated conical shell is formulated. The mass moment of inertia, of a number of axisymmetric shells and axisymmetric 2-dimensional shapes are shown to be limiting cases of a truncated conical shell. Two variants of the Monte-Carlo method for evaluating the MMoI, for a truncated conical shell are considered, the No PAT method, and the PAT method. For the No PAT method, the MMoI for an axis through the base, parallel to the base, IBB is evaluated directly. For the PAT method the Monte-Carlo method is used to evaluate the MMoI about the center of mass parallel to the base, IGG, and then the parallel axis theorem (2) is used to evaluate IBB.
The two Monte-Carlo methods are applied to the calculation of the MMoI for a number of different axisymmetric shells, and axisymmetric 2-dimensional shapes. In general, provided the center of mass of the shape is non-zero, the PAT method tends to be more efficient than the No PAT method. The conclusion here concerning Monte-Carlo method efficiency, is similar to 2 except the speed-up of the PAT method does not tend to be as large for axisymmetric shells compared to axisymmetric solid shapes. For example, the speed-up for a solid rod, the shape closest to a narrow tube is SP = 21.7. 2 The speed-up achieved for a narrow tube, using the PAT method relative to the No PAT method is SP =13.4.
This paper, and the linked paper 2 make it possible for the mass moment of inertia for any axisymmetric body, to be modelled as a composite of axisymmetric shells, and solid shapes. The final part of this paper is the application of the analysis, to possible student projects using the Monte-Carlo method, to evaluate the MMoI of shapes of interest to students, taking a course on rotational dynamics.
Footnotes
Nomenclature
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Appendix A1. Derivation of the mass moment of inertia for a truncated conical shell.
The mass moment of inertia for a truncated conical shell, can be derived using first principles, and the parallel axis theorem.
The starting point is the schematic diagram shown in Figure A1. The mass moment of inertia for a hoop, defined in Figure A1 about the axis of rotation x-x is,
Applying the parallel axis theorem,
Where Δ is the thickness of the truncated conical shell, and Stc is defined in Figure A1.
Integrating between z = 0 and z = Htc.
The equation of the line defining the curved surface of the truncated conical shape is,
Substituting for r as a function of z in (A3) and integrating gives
Introducing the mass, m of the truncated conical shell gives the result.
Which can be simplified to,
The center of mass for a truncated conical shell is,
The derivation of zcom,tc, is left as an exercise. The mass moment of inertia parallel to B-B, and through the center of mass is,