
Abstract
Recent advances in radar remote sensing of precipitation include the development of polarimetric radar, which has the capability of transmitting in both the horizontal (H) and vertical (V) polarization states, thus providing additional information on the target precipitation particles. Radar polarimetry has not only been proven to improve data quality and precipitation estimation, but also improves characterization of precipitation particles; thus it has great potential in weather monitoring and forecasting. Realizing the potential of this state-of-the-art technology, meteorological departments across the world are upgrading their radar networks to polarimetric capabilities. Commensurate with this new era in precipitation remote sensing, this article provides an overview of polarimetric radar measurements, emphasizing the intrinsic signatures and their association to precipitation particle shapes, sizes and distributions. The potential research and applications of polarimetric radar signatures in meteorology are discussed. A considerable number of recent peer reviewed journal articles dealing with the topic are included in the bibliography.
I Introduction
The active ground radar as remote sensor has been in use since its invention during the Second World War for providing the spatial extent of precipitation (Battan and Braham, 1956; Bent, 1946; Collier et al., 1983; Hooper and Kippax, 1950; Hunter, 1954; Twomey, 1953). However, radar is subject to several errors and ambiguities in remote sensing of precipitation. Villarini and Krajewski (2010) provided a comprehensive review of different sources of uncertainties in single polarization radar. Generally speaking, the uncertainties can be categorized as follows: radar miscalibration, ground clutter and anomalous propagation, signal attenuation, variability of drop size distributions, beam blockage, bright band contamination, vertical variability of precipitation system, poor understanding of hydrometeor properties, spatial and temporal sampling errors, and others.
The inclusion of Doppler capabilities into the single polarization radars has helped to rectify some of the above uncertainties (Chong et al., 2000; Tabary et al., 2001; Yamamoto et al., 2011). Further advances in radar technology have led to the development of polarimetric Doppler radar in recent years (Cluckie and Rico-Ramirez, 2004; Collier, 2002; Michaelides et al., 2009), and additional uncertainties can be reduced through the use of this technology. Although the history of polarimetric radar dates back more than three decades (McCormick, 1979; Seliga and Bringi, 1976, 1978), its use has been limited due to high instrumental costs. As the instrumental cost is coming down, polarimetric radars are beginning to complement single polarized weather radars in meteorological services. The US National Weather Service (NWS) is about to upgrade its nationwide network of the Weather Surveillance Radars-1988 Doppler (WSR-88D) to polarimetric radar capabilities (Doviak et al., 2000; Li and Mecikalski, 2010; Melnikov et al., 2011b; Ryzhkov et al., 2005c). Polarimetric radar is becoming a standard for operational use across the world; for example, the European EUMETNET Opera radar network has undertaken several projects to upgrade its radar network to polarimetric capabilities, in particular at C-band frequencies (Meischner and Hagen, 2000). As such, the European states have seen a series of developments in polarimetric radar research; for instance, in France (Gourley et al., 2009; Holleman et al., 2010; Scialom et al., 2009; Tabary et al., 2011; Vulpiani et al., 2008), Germany (Borowska et al., 2011; Friedrich et al., 2006), Italy (Celano et al., 2008; Pucillo et al., 2009; Silvestro et al., 2009), Finland (Leskinen et al., 2011; Markkula et al., 2008; Saltikoff and Nevvonen, 2011), the Netherlands (Leijnse et al., 2010; Unal and Moisseev, 2004; van de Beek et al., 2010), Denmark (Holleman et al., 2010), and others. The UK added one C-band polarimetric radar to the Met Office radar network in Thurnham, Kent, in 2005 (Rico-Ramirez and Cluckie, 2008). A new in-house polarimetric radar developed by the UK Met Office is currently being tested at Wardon Hill. Polarimetric radar research is also contributed from Canadian (Kumjian and Ryzhkov, 2008; Lee, 2007; Turk et al., 2011), Australian (Akita et al., 2011; Bringi et al., 2009; May et al., 2008a, 2008b, 2009), Japanese (Anagnostou et al., 2008b; Eito and Aonashi, 2009; Kato and Maki, 2009; Kim et al., 2010; Oue et al., 2010), and other radars.
Because of its ability in capturing better information on precipitation particles, polarimetric radars can be used as unique tools for validating satellite precipitation estimates and to support corresponding algorithm developments. A number of articles have demonstrated the potential role of polarimetric radars being engaged for the tropical rainfall measuring mission (TRMM) ground validation activities (Bolen and Chandrasekar, 2003; Chandrasekar et al., 2003, 2005; Marks et al., 2011; Wang and Carey, 2005; Wen et al., 2011), and for the forthcoming satellite mission, the global precipitation measurement (GPM) mission (Chandrasekar et al., 2008). As part of the GPM ground validation activities, the science plan includes the use of polarimetric radars from several locations (Islam et al., 2012e; Schwaller and Morris, 2011). Recent GPM field campaigns and pilot experiments have also used polarimetric radars to address a number of science questions relevant to the mission (Elmzoughi et al., 2011). The same holds for the recently launched Megha-Tropiques mission, dedicated to understanding the water cycle and energy budget in the tropics (Roca et al., 2010).
Commensurate with the future era in radar remote sensing of precipitation, this review article will present an overall concept of the polarimetric radar rationale and signatures. The potential of polarimetric radar signatures that have been exploited in precipitation remote sensing in recent years will also be highlighted. Basic knowledge of polarimetric radar systems, electromagnetic concepts and signal processing are covered by Bringi and Chandrasekar (2001) and Doviak and Zrnic (1993). Herzegh and Jameson (1992) and Zrnic and Ryzhkov (1999) provided overviews of polarimetric radar measurements.
II Polarimetric radar rationale
1 Background
The working principle of precipitation radar is the emission of short pulses of microwave radiation to the target precipitation particles. The energies scattered back from the target particles are then received as reflected power. Subsequently, the received power is related to the physical characteristics of the precipitation particles. Intrinsically, assuming that the precipitation particles are small compared to the radar wavelength, implying Rayleigh scattering approximation, the generalized meteorological radar equation is given as (Probert-Jones, 1962):

where Pr
is received power, Pt
is transmitted power, g is antenna gain, θ is horizontal beamwidth, Φ is vertical beamwidth, h is pulse length, K is dielectric factor, Di
is scatterer diameter, λ is radar wavelength, and r is distance between sample and radar antenna. For summation over a unit volume, the equation can be expressed as:

where C is the radar constant that depends on the radar characteristics (antenna gain, pulse width, wavelength, beam width, and pulse duration), and Z is the radar reflectivity factor. This reflectivity factor is the sixth moment of the drop size distribution (DSD), and can be written in linear units (mm6 m-3) as:

where N(D) is the drop size distribution with diameters between D and D+dD in a unit volume. The expression of reflectivity in linear units can also be represented by logarithmic units (dBZ):

These equations are based on the assumption that all scatterers are Rayleigh (D<< λ), and the accurate value of Z will be derived, subject to knowing the appropriate value of dielectric factor K. However, at higher frequencies the Rayleigh approximation may not be correct since the targets could be Mie scatterers (D≥ λ). Particularly, at X-band frequencies and beyond, non-Rayleigh (Mie) scattering is more likely. In those cases, the Z factor can be adjusted to ‘equivalent radar reflectivity factor’, Ze (Fritz and Chandrasekar, 2012; Islam et al., 2012e).
In conventional single polarization radar, there is only one polarization plane, producing Z∼ZH ; but in polarimetric radar (or dual polarization radar), two orthogonal polarization beams are produced, at horizontal and vertical polarization planes (Cao et al., 2012). As a result, the radar return power at horizontal polarization can be compared with the radar return power at vertical polarization. The backscattering cross-sections of raindrops are introduced in both horizontal (H) and vertical (V) polarization planes, thus producing ZH and ZV , respectively. Consequently, additional information on precipitation particle properties can be gained and several other polarimetric radar signatures can be calculated. In the following sections, we define the polarimetric radar signatures due to backscattering and propagation, and we summarize their associations with hydrometeor shapes, sizes and distributions. We restrict our discussion to linear polarization only, which has been the topic of interest in all recent works, and exclude circular polarization; for the latter, see Holt (2001), Scott et al. (2001) and Torlaschi and Holt (1993, 1998), among others.
2 Backscattering and propagation
In general, the scattering by precipitation particles interacts in two ways with linear polarization radar measurements, by backscattering and by propagation. The interactions often act together and define the characteristics of precipitation particles. As the radar signal is pulsed, the signal propagates through the precipitation medium. At the same time, the signal is backscattered from the precipitation particles, and finally received by the radar. The propagation effects can be described by the propagation matrix and the backscattering characteristics can be described by the scattering matrix. This matrix is then used to obtain the polarimetric radar measurements.
Four backscatter signatures have been used significantly in the polarimetric radar remote sensing community. Assuming the raindrop as oblate spheroid and by relating to the backscattering matrix, the signatures are defined as follows (Battan, 1973; Doviak and Zrnic, 1993; Sachidananda and Zrnic, 1985; Seliga and Bringi, 1976):




where Zh,v
are the reflectivity factors at horizontal and vertical polarization states, ZDR
is the differential reflectivity in dB, LDR is the linear depolarization ratio in dB, ρHV
is the correlation coefficient (unitless), Shh
and Svv
are the diagonal elements of the backscattering matrix of hydrometeors (the first subscript indicates the received polarized radar signal, whereas the second subscript indicates the transmitted polarized radar signal), the brackets < > indicate expectations expressed in terms of a set of samples, λ is the radar wavelength, and Kw
is a dielectric factor for water, with ∊w
as the dielectric constant of water depending upon λ and temperature, given as:

On the other hand, the most important propagation signature is:

where ΦDP
is the differential propagation phase shift in deg, Φhh
is the phase of the horizontally polarized signal, Φvv
is the phase of the vertically polarized signal. Subsequently, by the rate of change of ΦDP
, the specific differential propagation phase shift KDP
(in deg km-1) can be derived as:

We discuss these six polarimetric radar signatures. Some additional polarimetric signatures exist, such as the complex correlations between co-polar and cross-polar voltages as backscattering signatures, and attenuation and depolarization as propagation signatures (Zrnic and Ryzhkov, 1999), but the uses of these signatures have been limited since their suitability in precipitation remote sensing is still an active area of research.
Also, Zh,v
is related to the sixth moment of DSD, ZDR
is related to the reflectivity-weighted mean diameter of DSD, and KDP
is related to the product of water content and diameter of DSD. Relating to the DSDs, the intrinsic polarimetric signatures Zh,v
(mm6 m-3), ZDR
(dB) and KDP
(deg km-1) can be defined as (Bringi and Chandrasekar, 2001; Bringi et al., 2002):
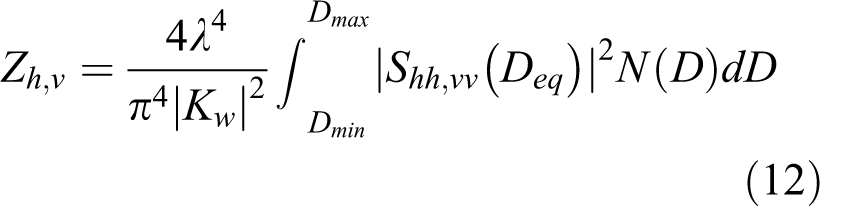


where N(D) is the DSD, Deq is the raindrop equivolumetric diameter in mm, Dmin and Dmax stand for the minimum and maximum drop diameter of the DSDs, Shh,vv (D) are the backscattering co-polar components of the complex scattering matrix S of a drop, fhh,vv (D) are the forward scattering amplitudes at horizontal and vertical polarization states, and ℜ is the real part of the complex number. The equivolumetric diameter Deq is related to the axis ratio of a raindrop and discussed in the next section.
3 Raindrop shape models
The principle of polarimetric radar measurement is based on drops being oblate in shape, not spherical (as is the case for single polarization radar). Generally, drop sizes smaller than 1 mm are spherical, but the shape becomes more oblate as the size increases. The drop shapes are exemplified by the ratio between the maximum vertical and horizontal axis, the axis ratio (b/a), as a function of its equivolumetric diameter (Deq
). The representation of axis ratio with respect to the equivolumetric diameter plays a central role in the definition of polarimetric radar signatures. Furthermore, the information of axis ratio is important for radar rainfall algorithms development and for derivation of the DSDs using polarimetric radar signatures ZH
, ZDR
and KDP
(Beard et al., 2010; Hagen and Meischner, 2000; Thurai and Bringi, 2005). Additionally, to simulate the polarimetric radar signatures from DSD measurements, one must assume a relationship between b/a and Deq
(Pepler et al., 2011; Thurai et al., 2007). The derivation of the DSDs, the estimation of rainfall rates or the simulation can all be hampered to a significant extent due to a small error in the axis ratio (Bringi and Chandrasekar, 2001).
Illustration of different raindrop shape models (Deq
vs b/a).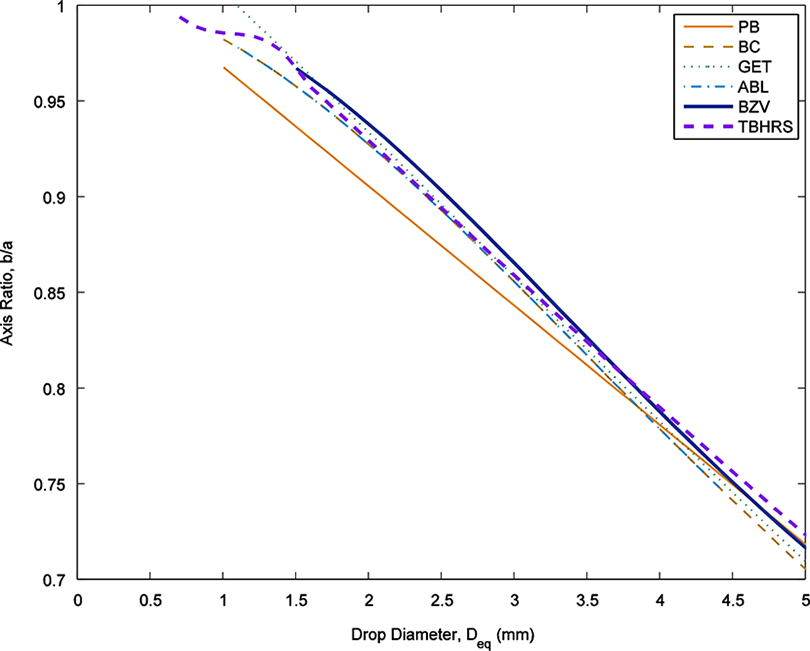
A number of raindrop shape models have been proposed by several researchers from laboratory, field and modelling investigations (see Beard et al., 2010, for an inclusive review). The first realistic raindrop shape was measured by Pruppacher and Beard (1970) (hereinafter named PB). The PB model is conceptualized in the laboratory using a vertical low turbulence wind tunnel to suspend water droplets. The drop shape was revealed in this experiment by taking a photograph, and a linear equilibrium relationship was found with equivalent spherical diameters, as:

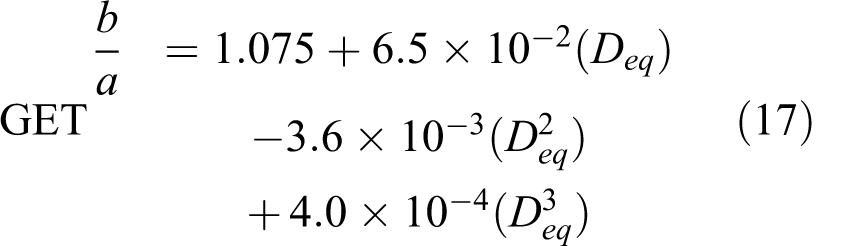
The PB model was extensively used to construct the theory of polarimetry and for development of rain estimators (Gorgucci et al., 2009). However, it was later found that raindrops are less oblate than foreseen in PB. Five different raindrop shape models are commonly quoted in polarimetric radar studies: the Beard and Chuang (1987) model (hereinafter named BC), Goddard et al. (1994) model (GET), Andsager et al. (1999) model (ABL), Brandes et al. (2002) model (BZV) and Thurai et al. (2007) model (TBHRS), given in equations 16–20, respectively (see Figure 1):
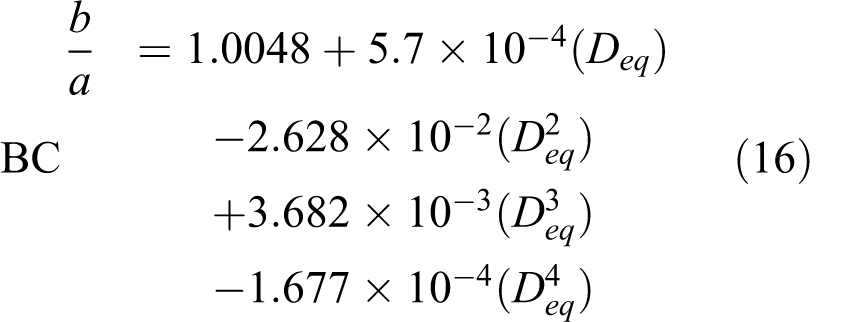







The BC model is based on the numerical methods through observation of water droplets’ aerodynamic pressure at terminal velocity which introduces the equilibrium condition between surface tension and hydrostatic pressure. Although the model is found to be in good agreement with the follow-on studies conducted by Bringi et al. (1998) and Chandrasekar et al. (1988) using aircraft probes, the oscillation phenomenon has not been accounted for in the model. When the larger diameter drops fall at higher terminal velocity than the smaller drops, collisions occur, resulting in oscillations. Raindrop oscillations and their causes were assessed by Brandes et al. (2002), Thurai and Bringi (2005), Tokay and Beard (1996) and others in field experiments. They concluded that the oscillating drops are more spherical than the small drops; this is a perturbation factor in polarimetric radar rainfall estimation. This oscillation characteristic has been addressed in the other models.
Briefly summarizing, the GET model is a composite model of two proposals given by Beard and Chuang (1987) and Goddard and Cherry (1984). The ABL model is from laboratory and field investigations for oscillations of moderate to large raindrops by a seven-storey fall column; it considers raindrops with higher average axis ratio as transverse mode oscillations. The BZV model is derived from experimental data that combines observations from past studies of Andsager et al. (1999), Beard and Kubesh (1991), Chandrasekar et al. (1988) and Pruppacher and Pitter (1971), and considers drop shapes that are significantly more spherical than that of equilibrium, in particular for diameters of 1–4 mm. The TBHRS model is from the recent 80 m fall bridge experiment, where artificial drops are generated from a pipe on an 80 m bridge, allowing drop oscillations to fall under calm conditions. The drops are then captured using a 2D video disdrometer, and the derived axis ratios agree with those of BZV. The model suggests using Beard and Kubesh (1991) fit for 0.7< Deq < 1.5 mm.
The aforementioned models appear in many polarimetric radar studies (e.g. Gorgucci et al., 2000; Ryzhkov et al., 2005b; Teschl et al., 2008), but no definitive conclusion is evident for which model should be used for radar applications (Gorgucci and Baldini, 2009). As noted above, the effect of different raindrop shape size relation on the polarimetric radar signatures, in particular with the three intrinsic parameters ZH , ZDR and KDP , has been investigated (Gorgucci et al., 2006; Keenan et al., 2001), and the rainfall estimators, R(KDP ) and R(ZDR , KDP ) are affected by underlying raindrop shape models, while R(ZH , ZDR ) is less sensitive (Lee, 2007; Matrosov, 2010; Teschl et al., 2008). The same applies for the DSD retrievals, which implies that the retrieval results are subject to the raindrop shape assumptions.
Another factor that needs to be considered in polarimetric radar measurements is the canting angle distribution of a raindrop (Bringi et al., 2008). As an example, an examination of canting angle distribution from the polarimetric radar measurements is presented in Ryzhkov et al. (2002). On average, the canting angle as Gaussian distribution with a zero mean and standard deviation in the range of 5–12° is generally mentioned in the literature (Bringi et al., 2008; Huang et al., 2008).
4 Drop size distributions
In radar meteorology, the DSD assumption as an exponential distribution has a long history (e.g. Marshall and Palmer, 1948). The exponential distribution is defined using two parameters, and given as:

where N(D) is the number of raindrops per unit volume per unit size, D is the drop diameter in mm, N0 is the number concentration parameter in mm-1-µ m-3, and Λ is the slope parameter in mm-1.
Two parameters are not enough to describe the volumetric distribution of raindrops; so, to better describe the natural variation of DSDs, Ulbrich and Atlas (1998) proposed the gamma distribution, with µ being the distribution shape parameter:

Note that, when µ = 0, gamma DSD becomes the same as the exponential DSD. Nevertheless, in this gamma model, N0 is dependent on µ and has no physical basis when µ ≠ 0 (Vulpiani et al., 2006). In order to address this issue, the normalization notion has been introduced by Willis (1984), and acknowledged by several authors in different studies (Bringi et al., 2003; Illingworth and Blackman, 2002; Lee et al., 2004; Testud et al., 2001). According to Bringi et al. (2003) and Testud et al. (2001), the normalized gamma DSD model is given as:

with:


where N(D) is the number of raindrops per unit volume per unit size, D0
is the median volume drop diameter in mm, Nw
is the normalized drop concentration in mm-1 mm-3, µ is the shape parameter (unitless), W is the liquid water content in g m-3, and ρw
is the density of water in g cm-3. Meanwhile, the mass weighted mean drop diameter (Dm
) can be related to the median volume diameter (D0
) as:

Finally, assuming the raindrop versus terminal velocity relationship (
A device called a disdrometer is usually employed to measure the DSDs. Several types of disdrometers, having merits and demerits for DSD measurements, exist; for their description, associated measurement errors and data processing, see Cao and Zhang (2009), Leinonen et al. (2012), Montopoli et al. (2008), Tapiador et al. (2010) and Tokay et al. (2002, 2005).
An example of normalized gamma fitting of the measured DSDs from the Chilbolton Joss-Waldvogel disdrometer. The solid lines represent the distribution for µ.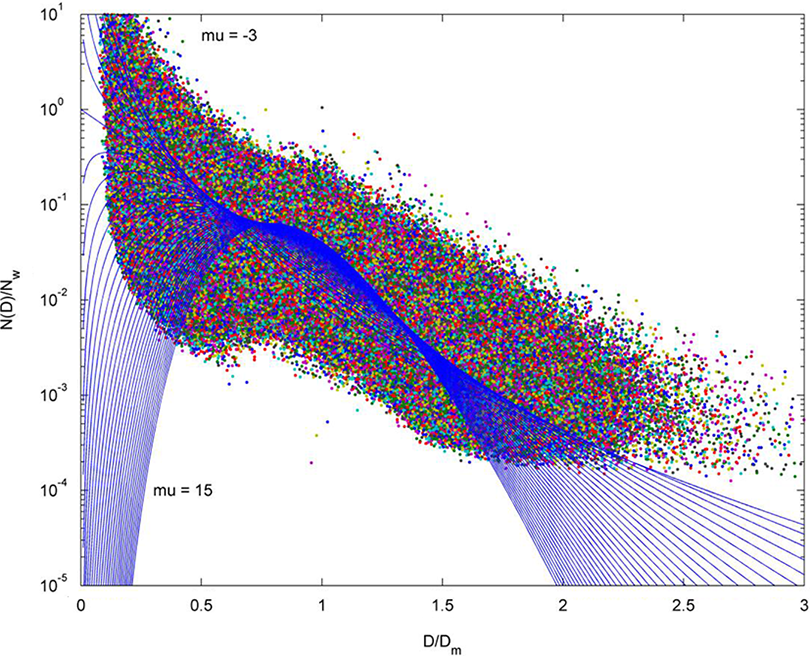
An example of normalized gamma fitting of the measured DSDs from the Chilbolton Joss-Waldvogel disdrometer data is illustrated in Figure 2. In this figure, the abscissa represents the normalized drop diameter and the ordinate represents the scaled data N(D)/Nw . One can observe that the measured DSDs are well bounded by the scaled gamma functions over a wide range of μ. High values of μ indicate a more truncated spectrum. After parameterizing the DSDs, it is straightforward to simulate the polarimetric radar signatures. For this, the T-matrix scattering simulation technique is commonly adopted as per the methodology described in Mishchenko et al. (2000) for non-spherical hydrometeors. As such, if drop size distribution is assumed as normalized gamma model, the three intrinsic polarimetric signatures Zh , ZDR and KDP become (Bringi et al., 2002):



where F represents a functional form.
Note that the normalized gamma DSD model has an advantage over the non-normalized gamma DSD model in that the three normalized gamma DSD parameters are independent in nature and liquid water content does not change corresponding to µ (Illingworth and Blackman, 2002). The normalization method makes it possible to clearly differentiate the rain types into stratiform and convective regimes (Islam et al., 2012d, 2012f). Moreover, the normalization method is very useful in accord with the polarimetric radar measurements. Intuitively, the ZDR is proportional to the D0 , while KDP is related to the product Nw and D0 . For this reason, it has become common to represent the DSDs as the normalized gamma distribution for various algorithms and model developments, such as for rainfall algorithms developments, attenuation correction methods, and DSD retrievals (Anagnostou et al., 2008a; Bringi et al., 2011b; Thurai et al., 2008; Vulpiani et al., 2009).
III Polarimetric radar signatures and their potentials
1 Reflectivity (ZH , ZV)
Reflectivity factors at horizontal and vertical polarization are proportional to the sum of the contributions from the backscattering cross-sections of all hydrometeors (equation 5). They provide a straightforward idea of the intensity of a precipitation episode: the more reflectivity, the more intense the precipitation episode would be. However, for the same precipitation particle size, ZH and ZV values from ice particles will be lower than that of the liquid particles. The dielectric constant of ice particles is relatively low compared to the liquid particles. In rain, ZH values are larger than ZV . Unquestionably, the ZH is the most commonly used parameter so far. From the early era of radar meteorology, the Z-R relationship has been extensively used for rain rate estimation. Nevertheless, a long-standing argument continues regarding the reliability of the Z-R relation and its associated uncertainties. Mainly, the uncertainties are allied with DSD variations in space and time (Abdella and Alfredsen, 2010; Islam et al., 2012b, 2012f; Kozu et al., 2006; Martner et al., 2008; Prat and Barros, 2009; Steiner et al., 2004) and with instrumental errors in the measurement of DSD (Campos and Zawadzki, 2000; Salles and Creutin, 2003). With the advent of polarimetry, incorporating ZH with some other polarimetric signatures, e.g. ZDR and KDP , more accurate rain rate estimation is possible in principle, compared to the conventional Z-R relation (Gourley et al., 2010; Maki et al., 2005).
In addition to the use of ZH for rain rate estimates, it has been recognized that the ZH information can infer the presence of clutter echoes (Chang et al., 2009; Delrieu et al., 2009; Hubbert et al., 2009a, 2009b; Silberstein et al., 2008). Further, the vertical profile of reflectivity can confirm the existence of a bright band or melting layer in the atmosphere (Fabry and Zawadzki, 1995; Rico-Ramirez and Cluckie, 2007; Rico-Ramirez et al., 2005, 2007; Zhang and Qi, 2010; Zhang et al., 2008). In general terms, the bright band is associated with melting of hydrometeors, thus reflecting enhanced radar signal ZH . A bright band in a stratiform event recorded by the Chilbolton advanced meteorological radar (CAMRA) is shown in Figure 3. The enhanced characteristic of ZH signal is evident herein at around 2.8 km height, indicating the existence of the melting layer. The corresponding polarimetric signatures confirm this statement. However, other studies have also reported that higher ZH values are associated with hail events (Heinselman and Ryzhkov, 2006; Lopez and Sanchez, 2009).
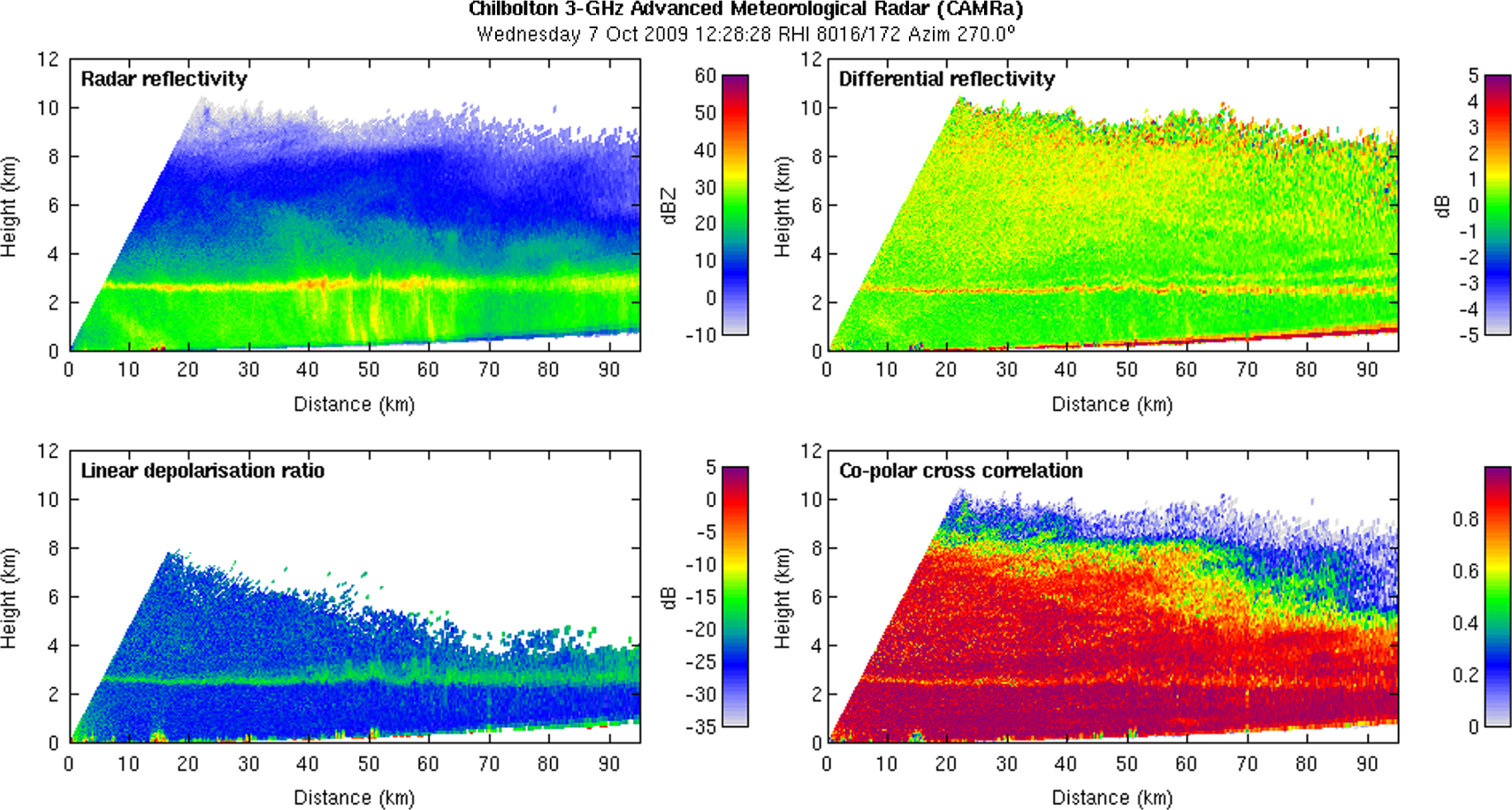
A typical example of the Chilbolton 3 GHz advanced meteorological radar range height indicator (RHI) scan depicting the polarimetric radar signatures ZH , ZDR , LDR and ρHV in a stratiform event. The presence of bright band signature is evident at around 2.8 km height.
ZH and ZV are, however, sensitive to the system gain bias or radar calibration error (Gourley et al., 2009; Park and Lee, 2010). At higher frequencies (shorter wavelengths), ZH and ZV are also affected by attenuation as the radar beam passes through high intense precipitation media, and thus could cause underestimation of radar rainfall estimation (Katsumata et al., 2008; Kramer and Verworn, 2009; Kramer et al., 2005; Rahimi et al., 2006; Rico-Ramirez, 2012). Thus the reflectivity factors need to be corrected for attenuation before possible use.
2 Differential reflectivity (ZDR)
The ZDR is the ratio of reflectivity at horizontal and vertical polarization (equation 6). It is directly related to the axis ratio, shape and size of particles. More specifically, it is the quantity of the reflectivity-weighted mean axis ratio of the DSDs. In Rayleigh approximation, if the produced axis ratio is less than 1 the ZDR values will be positive, while for an axis ratio greater than 1 negative ZDR values will be produced. Usually, small raindrops are spherical in shape. Thus, the measured ZDR values in small raindrops will be near to zero. But, as the drop diameter increases, the raindrop shape becomes more oblate. That means large values of ZDR are produced for large rain particles. Nevertheless, as hail tumbles while falling, it produces a ZDR of 0 dB. On the other hand, compared with rain particles, ice particles have a lower dielectric constant. So, even though ice particles are oblate in shape, they will have low values of ZDR . The values tend to increase when oblate ice particles become wet. Likewise, the melting layer contains a large amount of melted wet particles. That is why high ZDR values are observed in the melting layer (e.g. see Figure 3), and therefore ZDR is identified as a good indicator of melting layer (Brandes and Ikeda, 2004; Ikeda et al., 2005; Shusse et al., 2011). Furthermore, due to the fact that ZDR has diverse characteristics in different hydrometeor types, it has widely been accepted as a useful polarimetric signature for hydrometeor classification (Dolan and Rutledge, 2009; Evaristo et al., 2010; Park et al., 2009) (bearing in mind that the ZDR signature may differ from one band to another in the presence of hail due to resonance scattering; Kaltenboeck and Ryzhkov, 2013).
Additionally, because of its direct relationship to the mean particle shape and size, ZDR can be used to retrieve the microphysical DSD parameters, Nw , D0 and μ. A straightforward power law relationship exists between D0 and ZDR (D0 = aZDR b ) (Bringi et al., 2002; Williams and May, 2008), by which D0 can be retrieved (also true for Dm ; see Elmzoughi et al., 2011; Matrosov, 2011). Once D0 is retrieved, Nw and μ can also be obtained by means of ZH , ZDR and/or KDP (Anagnostou et al., 2008a, 2008b; Islam et al., 2012a).
Given the capability of ZDR for providing raindrop information, it can further be used in combination with ZH and/or KDP for improved rainfall rate algorithms. The algorithm R(ZH , ZDR ) has been used to improve the accuracy of rain rate estimates compared to the conventional Z-R relation (Tabary et al., 2011). More specifically, this algorithm has been exploited as suitable in low rainfall rate regimes. For high rainfall rate regimes, the formulation of R(ZDR , KDP ) has also been investigated by several authors (Cifelli et al., 2011; Jorgensen et al., 2011; Ryzhkov et al., 2005b, 2005c). However, ZDR should be calibrated within 0.1–0.2 dB accuracy (Ryzhkov et al., 2005a); if ZDR is not accurately calibrated, the rainfall estimates may be degraded significantly. Such degradation can be worse than the conventional Z-R relation. Moreover, as stated earlier, ZDR is near to 0 dB in hail, thus the R(ZH , ZDR ) algorithm will deliver high rainfall rates if rain is mixed with hail. So ZDR should be avoided for rainfall rate estimation with hail present (Ryzhkov et al., 2005b).
Furthermore, the ZDR ‘arc’ is considered as indicative of a kinematic property of supercell storms (Kumjian and Ryzhkov, 2008; Snyder et al., 2013). The indication is based on a vertical shear, which is quite difficult to observe using conventional Doppler radar. The indicator explains the low-level storm-relative environmental helicity (SREH), a measure of the streamwise component of environmental vorticity. The ZDR ‘column’ has also been reported with its coincidence to thunderstorm updrafts (Loney et al., 2002; Snyder et al., 2013). Another capability of ZDR is that it can provide significant information of clutter echoes through the use of its texture (Friedrich et al., 2009; Rico-Ramirez et al., 2009).
Although ZDR is independent of radar concentration, because ZDR is a product of ZH and ZV , the bias in ZDR may be introduced due to the mismatch between the horizontal (H) and vertical (V) channels (Liu et al., 2010). Thus ZDR requires additional care of offset correction and calibration. Intrinsically, 0 dB of ZDR for Bragg scatterers in a clear atmosphere represent the precision of the calibration (Melnikov et al., 2011a). Moreover, it can also be affected due to propagation and attenuation at high frequencies; therefore, the ZDR also requires the attenuation correction pre-processing step prior to use.
3 Differential propagation phase (ΦDP) and specific differential propagation phase (KDP)
The ΦDP is a measure of the difference of phases between horizontally and vertically polarized electromagnetic waves (equation 10). In comparison with vertically polarized returns, horizontally polarized electromagnetic waves experience larger phase shifts when propagating through horizontally oriented precipitation media, such as raindrops. So horizontally polarized waves propagate at lower velocity than vertically polarized waves and lag behind. As such, ΦDP can provide information about the shape of the particles. As the radar beam propagates, horizontally oriented particles will provide increasing positive ΦDP with range and vertically oriented particles will provide decreasing negative ΦDP with range. For spherical particles or those particles having no preferred orientation, such as snow and ice crystals, ΦDP is typically zero. ΦDP is also not affected by hail that appears spherical on radar due to tumbling (ΦDP ∼ 0). In rain, the ΦDP magnitude increases with respect to the oblateness of drop sizes. However, unlike ZDR , ΦDP values are dependent on concentration in a radar pulse volume. The greater the concentration, the higher the ΦDP values will be. At the same time, in the bright band or melting layer, ΦDP articulates high values, demonstrating the presence of snowflakes. In addition, the ΦDP fluctuates to a larger extent and becomes very noisy in the case of non-meteorological echoes (Islam et al., 2012c). Hence, ΦDP is a very useful parameter for clutter identification. It has been shown that the ΦDP texture is the outperformed signature among all polarimetric signatures (with exception of LDR) for clutter identification (Islam et al., 2012c). However, the ΦDP is a cumulative measure and cannot provide the information within particular ranges. Thus retrieving precipitation characteristics information on a gate by gate basis with ΦDP is not possible. KDP , however, can be used to acquire quantitative precipitation information on a particular region and normally KDP is computed over several range bins (e.g. 5 km or more). Wang and Chandrasekar (2009) and Hu et al. (2012) exemplified estimating KDP as range derivative of ΦDP .
The advantage of KDP (or ΦDP ) is that it is independent of radar calibrations. Therefore, absolute calibration of the co-polar reflectivity is possible using differential phase shift in rain (Thurai and Hanado, 2005). Possibly the highest potential of ΦDP , however, could be its immunity to attenuation, and thus its use for correcting radar reflectivity and differential reflectivity for attenuation. A trend of larger phase shifts usually exists along the beam as portions of the electromagnetic spectrum are being lost due to scattering and absorption in the precipitation media, which leads to weakening of the radar signals. Figure 4 provides such an example of decreasing ZH along the radial due to attenuation effects, in which the corresponding ΦDP profile confirms the attenuation experience by showing large phase shifts.
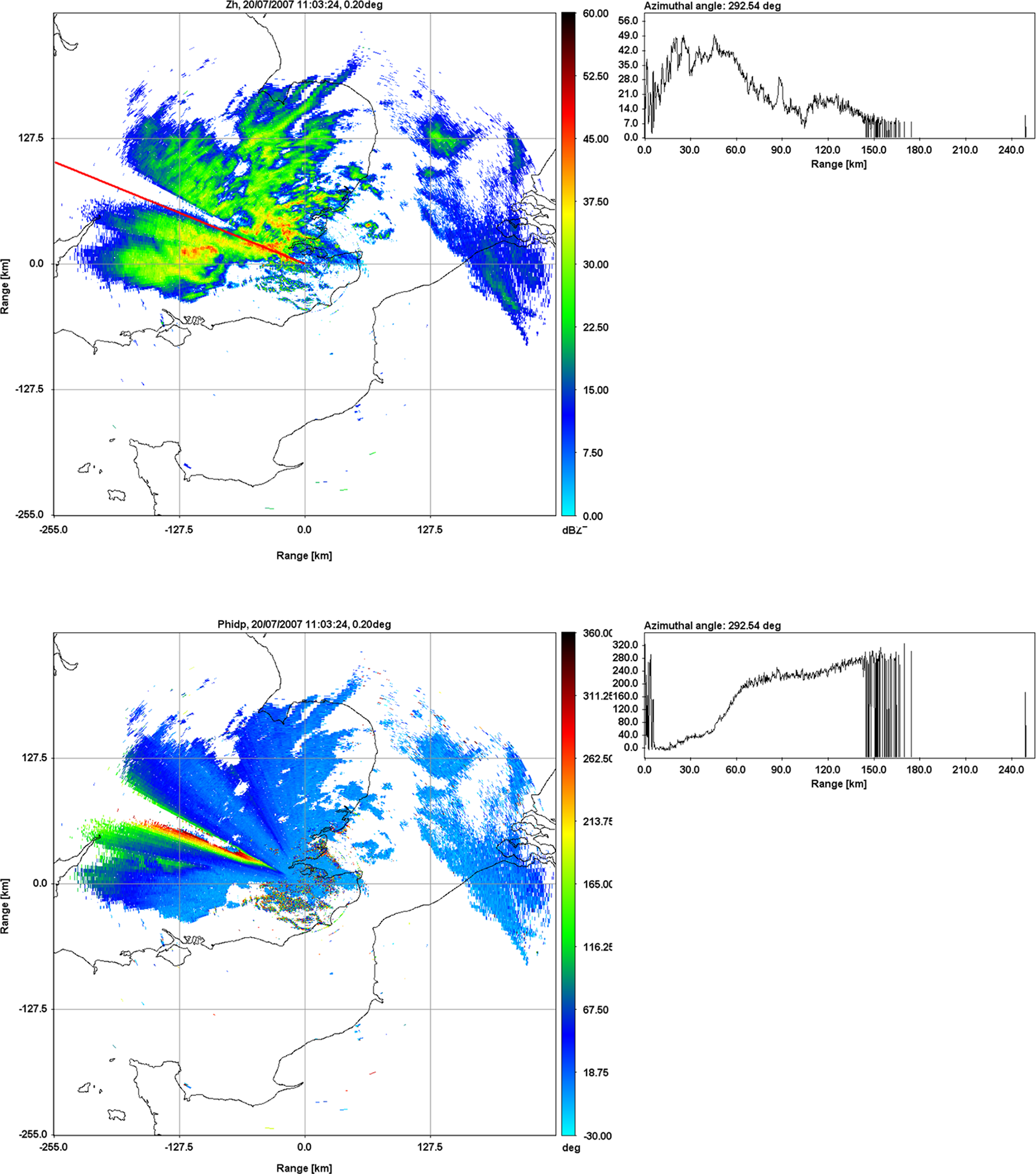
The Thurnham C-band polarimetric radar plan position indicator (PPI) of ZH and ΦDP signatures in an extreme attenuation event. Corresponding ZH and ΦDP profiles for a particular attenuated beam are also displayed in the right panel.
A linear relationship of specific attenuation AH
and specific differential attenuation ADP
against KDP
exists, following Gu et al. (2011):


Here the coefficients are dependent upon several factors, such as radar wavelength, raindrop temperature, drop shapes, and DSDs. Generally speaking, the attenuation experience for a given rain rate is relatively small and negligible at S-band compared to higher frequencies such as C-band and X-band. Therefore, attenuation needs to be corrected for at those frequencies. A number of attenuation correction algorithms exploiting ΦDP (related to KDP ) have been proposed (Bringi et al., 2001; Smyth and Illingworth, 1998; Vulpiani et al., 2008). Subsequently, the ΦDP based correction procedures have been successfully applied in order to correct the radar reflectivity and differential reflectivity at different frequencies (Anagnostou et al., 2009; Gourley et al., 2007; Hu et al., 2010; Snyder et al., 2010; Tabary et al., 2009; Xue et al., 2009). Again, since, KDP is immune to radar attenuation, the R(KDP ) estimator has been an encouraging choice for radar rainfall estimates at attenuating frequencies such as the X-band (Anagnostou et al., 2010; Borowska et al., 2011; Gosset et al., 2010; Wang and Chandrasekar, 2010). The use of the R(KDP ) estimator at C-band (Silvestro et al., 2009; Vulpiani et al., 2012) and S-band has also been reported. Particularly in hail or with rain/hail mixture, R(KDP ) estimator has proved as useful (Giangrande and Ryzhkov, 2008).
Furthermore, the derivation of KDP from ΦDP is already cumbersome. KDP is noisy along the beam path, and in light rain intensities the noise is greater and KDP becomes less effective (below 0.2 or 0.3 deg km-1). Accordingly, based on the noise of ΦDP , a filtering treatment is required to smooth the signal (Hu et al., 2012; Hubbert and Bringi, 1995).
4 Linear depolarization ratio (LDR)
The LDR is the logarithm of the ratio of the cross-polar power to the co-polar power received (equation 7). A horizontally polarized radar signal is transmitted, but both horizontally and vertically polarized signals are measured when they return; thus it measures the depolarization of the horizontally polarized signal scattered into the vertical direction. Several procedures are available to estimate the depolarization from linear H and V polarization measurements (e.g. Chandrasekar and Bharadwaj, 2009; Hubbert et al., 2003; Matrosov, 2004). Indeed, this depolarization can find the characteristics of associated hydrometeors, such as shape, uniformity, dielectric constant, thermodynamic phase and degree of canting. Note that, for a perfect spherical particle, no depolarization will occur to the horizontally transmitted signal, thus theoretically resulting in LDR to infinity. If the target particle is not a perfect sphere, cross-polar power return will be produced. For spherical particles, such as rain and snow, cross-polar measurements are very low compared to the co-polar measurements. Therefore, typical LDR values lie from –35 dB to –15 dB in rain and snow. Further limiting of LDR values to –40 dB may provide more insights into the precipitation characteristics at subfreezing temperature (Bringi et al., 2011a). Also, the melting layer exhibits a distinct peak of the LDR values of –15 dB, on average (Kowalewski and Peters, 2010). Additionally, several studies have investigated the characteristics of LDR for various types of hydrometeors, such as hail, graupel, snow crystals, and mixed phase hydrometeors (Depue et al., 2007; Hopper et al., 1991; Islam et al., 2013; Kennedy et al., 2001; Lim et al., 2005; Sato and Okamoto, 2006).
Alternatively, higher values of LDR are often associated with the clutter echoes, and it has been successively used in suppressing the ground clutter and anomalous propagation. In a simple way, clutter signals can easily be rejected by using a high threshold of LDR. However, the simple threshold based technique has the limitation of clutter rejection, because LDR increases with decreasing signal to noise ratio (SNR). Nevertheless, the use of LDR within a spectral polarimetry perception is established for improved clutter suppression (Unal, 2009).
Lastly, LDR is free from radar calibration errors and independent of concentration; nevertheless, it is prone to high noise and propagation effects. Moreover, no quantitative information of rain rates can be achieved using this signature.
5 Correlation coefficient (ρHV)
The correlation coefficient (ρHV ) is the correlation of the time series of continual observations of reflectivity at horizontal and vertical polarization (equation 8). The theoretical ρHV values range between 0 and 1. Commonly, ρHV is a good measure of the uniformity of the hydrometeor orientations and shapes. If the shape of the hydrometeor is uniform and regular, the ρHV will be near to unity; for non-uniform and irregular targets, the ρHV will be considerably lower. The value of ρHV decreases as the diversity of the hydrometeor shape increases (Zrnic et al., 1993). As a result, ρHV can identify non-meteorological echoes as well as various types of meteorological echoes. For non-meteorological echoes such as clutter and biological targets, the two polarizations (H and V) have different amplitudes. Therefore the correlation ρHV becomes low. Again, since raindrops and snow are nearly spherical in shape, the H polarization is almost as same as the vertical polarization. That implies the ρHV in rain and snow is almost unity (∼0.98). In the case of mixed hydrometeors present in a radar volume, ρHV is lower. Besides, hail particles have a lower value of ρHV , and with increasing hail sizes ρHV value decreases. Therefore ρHV has been extensively used for hydrometeor classification (e.g. Keenan, 2003; Liu and Chandrasekar, 2000; Marzano et al., 2010). Due to its straightforward hydrometeor classification quantifying rain, melting particles and snow, it is a valuable polarimetric signature for melting layer detection (Boodoo et al., 2010; Brandes and Ikeda, 2004; Giangrande et al., 2008; Matrosov et al., 2007).
However, ρHV can degrade meaningfully and become smeared with range due to decreasing SNR and beam broadening effects. For instance, in the RHI scan provided in Figure 3 the beam broadens with increasing distance. This effect implies that at greater range the radar beam is too wide, and sometimes may be wider than the melting layer. In consequence, detection of melting layer at longer distance may not be accurate.
IV Opportunities and challenges
The quantitative precipitation estimation (QPE) should be regarded as one of the most important topics in polarimetric radar remote sensing of precipitation (e.g. Kabeche et al., 2012; Kato et al., 2012; Ventura et al., 2012). For meteorology, the polarimetric QPE should be able to contribute towards improved and accurate weather monitoring and prediction of atmospheric hazards (rainfall extremes). Li and Mecikalski (2010) reported a data assimilation scheme that utilizes the polarimetric signatures to assimilate into a regional mesoscale model with the three-dimensional variational data assimilation (3DVAR) system. They demonstrated the benefit of utilizing polarimetric radar signatures in the assimilation scheme and how it improved in short-term storm forecasting for a mesoscale convective system. Nevertheless, the authors clarified that in their study only the warm rain microphysical processes were considered, but not the ice microphysics. Thus, the results provided an initial understanding of the benefits of the radar polarimetry, and there is still room for improvements in forecasting the precipitation system.
For hydrology, the polarimetric QPE will be able to provide an improved estimation of precipitation propagating to hydrological models, thus leading to better hydrological forecasts, because precipitation is their main driving force (Berne and Krajewski, 2013; Gourley et al., 2010; Rico-Ramirez et al., 2012). Additionally, polarimetric QPE is focused on rain estimates, and estimating snowfall is considered as a challenging task. Although Schneebeli et al. (2013) identified snow through radar polarimetry, the quantification of snowfall is not well developed. Moreover, in mountainous regions, complex orographic issues degrade polarimetric radar data quality, and hinder precipitation retrieval (Vulpiani et al., 2012).
Polarimetric radar is creating significant opportunities for precipitation science, in both research and operational fields. In consequence, meteorological agencies across the world are turning to polarimetric radar technology, and these will provide even more opportunities for basic and applied research in the upcoming years.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.