
Abstract
In 1903, WH Dines first proposed kites as platforms from which scientific measurements could be captured. This early paper was focused on the collection of atmospheric measurements but later on, kites were used widely as platforms for aerial photography – a memorable example is the aerial survey of San Francisco captured from a kite platform after the 1906 earthquake. In this paper, we begin by providing a brief overview of this early scientific and remote sensing work from kite platforms. We then discuss the resurgence of kite use within modern geography and environmental science research using examples from published work in the past 20 years. We discuss how the use of kites in these disciplines has expanded in recent years, with a renewed focus on the collection of proximal remote sensing data. Also, we present a variety of contemporary examples of kite-based sensing (including basic mapping, ecological survey, population counts and humanitarian mapping) and discuss the merits of kites compared to drone-based platforms which have captured much of the public and scientific attention as proximal sensing platforms in recent times. The beauty of kite-based proximal sensing lies in the simplicity and low-cost nature of data capture, as highlighted by Dines’ 1903 paper. This simplicity supported by the wide array of modern complex data processing capabilities means that kites are now in a position to deliver fine-grained spatial data to the modern geographer. Furthermore, in today’s world, there are many situations where kites can fly freely, but drones cannot.
Keywords
I Introduction
In 1903, Dines (1903) provided one of the first scientific papers explaining the methodological framework that could be employed to turn simple long-line kites into platforms for the collection of scientific data. The major focus of Dines’ work was the empirical measurement of atmospheric conditions. The ‘rhombus’ kites (Figure 1) he described using were launched from the deck of a small tug boat and were capable of ‘reaching 1500 feet elevation’, with a potential for attaining elevations of ‘5000 feet’ with a ‘sufficient relative motion’ of the boat and favourable winds. His work showed the impact of pressure-driven weather systems on local temperatures, where he commented that ‘upper air in the neighbourhood of a cyclone is relatively warm’ and that ‘cyclones are convectional effects’ with varying conditions over water and land. Around the same time, others were experimenting with kites as platforms for other types of environmental measurement. The most notable was George Lawrence in 1906 who famously used a stack of Conyne (a modified form of box kite) kites to capture aerial images of San Francisco in the immediate aftermath of the devastating earthquake. This was a technique he had pioneered in the years before, where his Chicago-based company coined the slogan, ‘The Hitherto Impossible in Photography is Our Specialty’. Piloted aviation was still in its infancy at this time, and air ships were expensive and cumbersome. In response to this, George Lawrence devised and patented an ingenious system that he named ‘the captive airship’ of multiple kites and wires that could lift a 46-pound panoramic camera 2000 feet into the air. Lawrence launched the kite stack half a mile above the city and then ‘tripped the shutter with an electrical impulse generated by an old style telephone magneto’ (Arrowsmith, 2002). The image of the city was then exposed onto a ‘22 by 55 inch negative’ (Arrowsmith, 2002).

The box kite used in the study by Dines in 1903. Reprinted by permission from Macmillan Publishers Ltd. (Dines, 1903).
Both of these early studies, although vastly different in their complexity, showed that within the realm of science and engineering, the spirit of self-service data capture was alive and well at the start of the 20th century. Dines (1903) stated that ‘kite flying is an art of which we were then without previous experience’. The simplicity of the technique was highlighted by Dines’ (1903) study in which he stated that, ‘no difficulty was experienced’ when operating the equipment and capturing atmospheric data from the kite platform.
With a long hiatus in their documented use within scientific literature, the past couple of decades have seen a renaissance of kite flying for scientific data capture (Aber and Gałązka, 2000). The atmospheric and meteorological science area initially explored by Dines (1903) has had little traction with kite platforms since this early work. This scientific community has adopted balloons instead of kites as a more robust platform for empirical measurements because they can aid data capture at higher elevations (this opportunity was in fact highlighted by Dines (1906) in a later paper published in Nature). There are relatively few contemporary examples of meteorological studies using kites. A review of meteorological research throughout the 20th century is provided by Balsley et al. (1998), detailing early work and more recent research investigating electric fields, temperature, ozone and humidity.
In recent times, research in physical geography has particularly benefited from kite-based optical remote sensing, and the rest of this manuscript will explain the reasons for that renaissance and justify the utility of kites as scientific tools supporting environmental research. We will also compare kites to their powered counterparts (lightweight drones), which are widely hailed as modern self-service platforms for data capture across the geosciences and ecology, and we will provide a balanced view of kites against drones as alternative platforms. This manuscript will also visit a range of scientific and non-scientific applications of kite-based proximal sensing to demonstrate the progression and renaissance of this method for field survey.
II A renaissance in proximal remote sensing
1 The need for fine-grained data
Recent years have seen an upsurge in the application of proximal remote sensing from a range of platforms including, but not limited to, kites. This has been driven by the recognition of the need for fine-grained and responsive data in both time and space, and the need to bridge the gap in scale between in situ measurements and those collected by coarser resolution satellite sensors. For example, in soil erosion studies, D’Oleire-Oltmanns et al. (2012) argue that proximal sensing allows for the monitoring of processes at the ‘speed of change within a landscape’. Barrell and Grant (2015) writing recently on intertidal habitats state that ‘while the spatial resolution of satellite and aerial photography has improved it remains insufficient for detecting fine-scale structure’. Fine-grained data from proximal platforms can certainly provide sub-decimeter resolution models for addressing science questions in diverse fields including ecology (Dandois et al., 2015), forestry (Chianucci et al., 2016), geomorphology (Eltner et al., 2015; Westoby et al., 2012), archaeology (Verhoeven, 2009) and environmental management (Torres-Sánchez et al., 2013).
2 Drones, blimps and balloons
With a wide variety of papers documenting their use in supporting geographical, ecological and geoscience research, there is no doubt that lightweight drones (sometimes called unmanned aerial vehicles) appear to be the most disruptive technological advancement in this field of proximal sensing (Anderson and Gaston, 2013; Jones et al., 2006; Woodget et al., 2015). The opportunity to obtain fine spatial and temporal resolution data, along with user-controlled revisit times has made drones a popular self-service research platform. They come in a variety of shapes and sizes, catering for differing types of ‘mission’, but despite the long list of advantages that they bring to scientific data collection, they are not without their operational limitations. Firstly, drones are complex to operate and maintain, requiring a skilled pilot for safe and successful operation. In short, it is unlikely one can successfully operate a drone platform without first investing significant amounts of time. Secondly, drone costs can be prohibitive: although most lightweight drones fall into a ‘low-cost’ bracket (Koh and Wich, 2012), they usually cost at least £1000, which may be out of reach for those with limited budgets. Thirdly, flights of drones are heavily controlled and regulated in most countries of the world, with drone use in some settings illegal (e.g. in urbanised zones in the UK drone flights are illegal without first obtaining special permission from the civil aviation authority). Fourthly, battery technology somewhat limits the use of drones for particular types of scientific data capture, with typical flight times from lightweight multirotors being between 8 and 20 minutes per flight. For surveying larger sites, this can be limiting, requiring pilots to take-off and land multiple times to achieve good spatial coverage. Finally, small lightweight drones struggle to operate consistently in high winds which makes surveying in some situations problematic. With these limitations in mind, it is, therefore, important to recognise the alternatives to drone platforms, which in some situations can offer significant advantages for proximal sensing. Options include balloons, blimps and kites. Balloons and helium blimps have been employed as remote sensing platforms, offering low-altitude perspectives of vegetation (Bar Massada et al., 2008; Jiao and Zhou, 2014; Miyamoto et al., 2004) and shorelines (Eulie et al., 2013). These offer a low-cost self-service data collection platform, but they require a source of fuel in the form of helium, which is costly. Blimps have allowed for greater coverage than balloons or kites, but they are often complex and require a team of people to operate them safely (Ries and Marzolff, 2003). Like balloons, the logistics of inflation with helium at sites with restricted access is a major limitation, only making them suitable in particular situations (Guichard et al., 2000). In comparison, kites have a variety of operational and cost advantages over drones, blimps and balloons, and resultantly, there are a wide variety of reasons why their use has expanded in geographical and environmental research in recent times.
3 Kites as an alternative
The aforementioned issues posed by drone technology and gas-filled platforms such as balloons and blimps are largely absent or less pronounced with kites. Firstly, operational complexity is lower, with launch and landing procedures simplified and the tethered nature of the equipment making it easy and safe to operate. A natural fuel source in the wind means safety issues with batteries or helium fuel are also avoided. Maintenance is often minimal, with robust materials such as nylon popular choices for kite foil material. Kites are easy and cheap to repair, and often adaptable allowing for flexibility in the range of materials that can be used. Secondly, kites are low-cost pieces of equipment. For example, a fully operational kite kit including a camera is estimated by Delord et al. (2015) to cost ∼£600. Our own research utilises a fixed-line kite (kite aerial photography (KAP) HQ 1.6 m foil) fitted with a ruggedised Global Positioning System (GPS)-enabled camera, costing much less (∼£350). Although prices are in constant flux, for comparison, a fully operational drone platform and associated equipment and training can cost up to ∼£30,000 (Woodget et al., 2015).
The issue of legality is where kites greatly excel in comparison with drones. Safety is far less of an issue due to the absence of an autonomous component. Concerns around privacy are still present if cameras are being used, but one is more likely to permissively fly a kite due to the traceability of the equipment and fewer associated safety concerns. In today’s world, there are many situations in which kites can fly, but drones cannot. Battery life limitations that regularly affect drones do not hinder kite-based operations. Apart from those required for sensors on board the platform (i.e. in a camera), the natural source of wind allows for unconstrained data capture. Kite design has also developed to allow for flight in the most minimal wind conditions (e.g. large foil-based single-line kites with wing areas of 8–12 m2 (such as those manufactured by HQ) can allow take off in winds as low as 3 mph).
4 The 21st-century technology boom
We argue that the renaissance of kite-based remote sensing is being fuelled, in large, by a technology boom. Several technological developments in the past decades have joined forces to allow kite-based sensing to emerge and grow again. These parallel developments include: the miniaturisation of digital sensors (i.e. compact multispectral imaging systems (Shaw et al., 2012) and thermal imagers (Zarco-Tejada et al., 2012)), and software development (i.e. the Canon Hack Development Kit) which are providing new ways to collect data. Sensors are also vastly more affordable, with a digital infrared camera costing US$10,000 in 2001 (Aber et al., 2001) and now more in the region of £220 (http://www.mapir.camera/). Increased coverage from global navigational satellite systems (i.e. GPS, Galileo, GLONASS (the Russian satellite navigation system)) and the inclusion of GPS capabilities in mobile phones and digital cameras also allows for more geographically meaningful observations to be captured from kites. On the ground, differential Global Navigation Satellite System with Real Time Kinematic techniques can complement the capture of proximal remote sensing data with centimetre-accurate measurements (Eulie et al., 2013; Puttock et al., 2015) for product validation or geospatial model derivation. Researchers are also offering a range of new ways to process the data captured from kite-based platforms. Computing power is readily obtainable at low costs, whether it be locally (e.g. desktop or laptop), remotely on the cloud (i.e. Amazon web service) or somewhere in between for scientists based at universities or research institutes (i.e. Beowulf clusters (Meredith et al., 2003)).
Kite rig design can now be readily achieved with the aid of 21st-century technology. Techniques such as 3D printing allow for fully customisable rigs to be constructed to allow sensors to be hung from kite lines (e.g. in Figure 2 we demonstrate a bespoke picavet mount designed to house a Canon Powershot D30 camera (author’s own design)). Luckily, the compact and lightweight nature of camera equipment and sensors today does not require the complexity of rigs used in early kite-based aerial photography. Pendulum and picavet mounts are the two most popular forms of camera mounting designs for kites, and the internet has become a comprehensive source of tutorials on DIY designs (e.g. Silver, 2013) and ready created models to be printed with a 3D printer (e.g. Fastie, 2014).
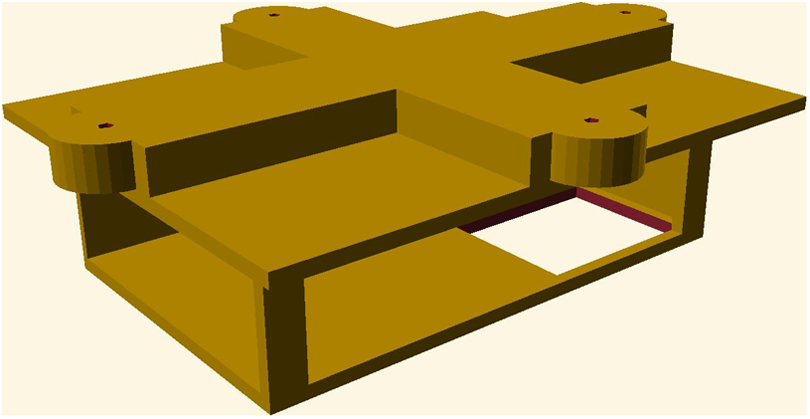
Custom-designed lightweight picavet mount for Canon Powershot D30 (created by author JPD). Model constructed in OpenSCAD (http://www.openscad.org/) and available to download from Thingiverse (http://www.thingiverse.com/thing:1372969).
There is a high-tech revolution underway in kite-based aerial photography, and a prime example is the intelligent kite aerial photography platform (iKAPP) platform, which provides a comprehensive example of how robotics, on-board micro-processors and imaging capabilities can be combined into a sophisticated surveying platform (Murray et al., 2007). Additions of a real-time data link via an on-board computer and functions to automate the coverage of a site are a true demonstration of the fusion between the humble kite similar to that used by Dines and 21st-century technology. One step further than iKAPP is the AUTOKITE, a hybrid model plane, with autopilot and kite components attached (McGarey and Saripalli, 2014). The designers of this system claim greater flight times, lower required pilot experience, lower costs and more wind tolerance than multirotor drones. However, the incorporation of a lithium battery and loss of the tethered component bring into question its labelling as a true kite platform.
III Kites as platforms for proximal sensing in physical geography
Over 100 years after Dines’ original publication there is a range of new work emerging that shows how kites continue to evolve as platforms for data capture in physical geography. The following sections will discuss the variety of applications where kites have been used to capture fine-scale data describing environmental or geographical phenomena.
1 Basic mapping
Kites serve as an ideal tool for basic mapping purposes. The nadir view provided from the kite perspective has proven useful for describing the location of ice-wedge polygons in Alaska (Boike and Yoshikawa, 2003). Further geomorphological study has been conducted on sand dunes (Lorenz and Scheidt, 2014) and surface features relevant to Quaternary studies (Aber and Gałązka, 2000). Kites have been used successfully to obtain aerial data over coastal or coral reef environments (Currier, 2015; Scoffin, 1982). Indeed, coastal environments are often difficult places in which to fly drones owing to complex wind conditions, and yet these environments are perfect for kite flying, with more consistent wind conditions allowing for good kite survey opportunities. Figure 3(a) shows the author flying a 1.6 m HQ KAP kite over a seagrass habitat in Greece alongside a resultant aerial image (Figure 3(b)) captured from a Canon Powershot D30 camera tethered below the kite using a 3D-printed rig similar to that shown in Figure 2. The image of the coastal habitat was captured from a flying height of ∼20 m. The conditions at this coastal site were too windy and unsafe to allow a drone to be flown, demonstrating the important complementary role of kite platforms in supporting fine-grained data capture.

Author (JPD) flying 1.6 m HQ KAP single-line kite over seagrass meadows in northern Greece (a) and resulting aerial photograph (b).
Archaeology is one of the areas where there is more long-term evidence of their use as surveying tools. The literature contains three decades of evidence of kite use for local scale surveys with the main focus being mapping and site documentation (Verhoeven, 2009). Perhaps the reason for kite use being more prominent in this field is that archaeological sites tend to be contained within relatively small geographical areas and kites are, therefore, an ideal tool to capture the required aerial data in an easy low-cost and safe manner.
2 3D landscape reconstruction
Photogrammetry and, more specifically, Structure from Motion (SfM) has become an increasingly prominent data processing technique within physical geography (Smith et al., 2015). Its roots are in computer vision and ultimately it allows for the 3D reconstruction of a scene using unordered 2D images (Dandois and Ellis, 2013; Westoby et al., 2012). There are many platforms from which to collect 2D photographs to be used in a SfM workflow, including balloons, gyrocopters, drones and kites (Smith et al., 2015). One key requirement of data collected for SfM processing is the acquisition of photographs with overlapping, multiple viewpoints of the same scene or object of interest. From kites, this can be achieved relatively easily with the ability to move the kite slowly over complex features allowing for optimal photographic overlap, or by variations in camera orientation provided by the natural movement of the kite, or by more intelligently designed camera rigs (i.e. radio-controlled camera mount) (Marzolff and Poesen, 2009; Smith et al., 2009). In typically poorly surveyed environments such as mountainous landscapes, kites provide a simple lightweight solution for proximal data capture, and in places where power supplies are limited, kites are the perfect low-tech platform for aerial photography. For example, Wundram and Löffler (2008), working in a remote region in the Norwegian mountains, used a 4MP camera attached to a kite to generate a 0.25 m digital elevation model of an alpine mountain landscape.
An interesting example where kite-based mapping procedures were used to great effect was in a study of an Australian intertidal rocky shore (Bryson et al., 2013). The work in this study followed a low-cost theme throughout, with consumer grade digital cameras, a small number of ground control points and a consumer grade handheld GPS device for validation. With great attention to detail in the design of the study, multispectral terrain models with sub-centimetre resolution were created, describing elevation, slope, aspect and land cover type. This work is a prime example of how kite-based mapping can generate fine spatial resolution proximal sensing data of the natural environment.
3 Ecology and agriculture
Population counting of bird colonies has been demonstrated as a suitable application for kites in ecological research. Adélie Penguin (Pygoscelis adeliae) colonies have been surveyed with longline kites, with logistical complexities and cost savings cited as the key reasons for the choice of remote sensing platform (Fraser et al., 1999). A similar method but with improved camera technology has been employed over Guanay Cormorant (Phalacrocorax bougainvillii), Macaroni penguin (Eudyptes chrysocome) and King penguin (Aptedonytes patagonicus) colonies (Delord et al., 2015). The resulting images were mosaicked and contained estimated counts of up to 140,000 breeding pairs. Presumably, kites offer a lower risk option than drones in these settings, being quieter and with reduced risk of animal disturbance (Vas et al., 2015).
In agricultural settings where fine-grained information on crop health, soil condition and water availability are critical determinants of yield, there are great opportunities and proven capabilities for kite platforms. Kites have been used as a feasible platform from which to monitor growth rates over bean and banana plantations (Oberthür et al., 2007). The calculation of above-ground biomass of desert vegetation has also been tested with some success in China (Siebert et al., 2004). Although this work was conducted to track degradation of the environment, the principles of biomass estimation could also be useful for commercial purposes.
4 Democratic mapping and teaching
Outside the realm of scientific research, it is also our view that kites will play a critical future role in democratic mapping and teaching-based activities. The minimal required training, robustness of the equipment and safety of operation have made kites a welcome addition to practical field study in higher education (Sander, 2014). With kites being ubiquitous in most regions of the world, there is a great opportunity to see these, as combined with basic sensor technologies (i.e. cameras in widely available mobile phone devices) as tools for democratic mapping. This has been tested with drones in the city of Lima (http://remaplima.blogspot.co.uk/) but in our view, the basic simplicity of kite flying offers an even more accessible toolkit for communities across the world to engage with new self-service mapping in an affordable fashion. This leads to the role of fine-grained spatial data in assisting with humanitarian work, and the potential role of kites in making this more accessible. For example, kites have been used to assess the magnitude of a humanitarian emergency in Chad (Sklaver et al., 2006). The position of infrastructure features such as latrines and counts of the number of people in a refugee camp were obtained from aerial photographs. This study demonstrates that the choice of a kite is ideal in environments with no/limited fuel, where alternative proximal platforms such as drones or balloons are unviable. The flexibility of the parts and tethered nature also makes it a safer option for obtaining aerial photographs in what is described as a crowded environment (Sklaver et al., 2006). The aforementioned technology boom has also brought with it innovative and accessible ways to share data and software for analysis purposes. Open aerial map (https://github.com/hotosm/OpenAerialMap) is one such example, where tools are provided to aid in the sharing of aerial data for use in disaster relief situations.
IV Conclusions
The renaissance in kite-based proximal sensing has its foundations in the amateur world, with much scientific work citing public open-source publications such as the ‘Areal Eye’ as a source of information on kite and rig design (e.g. Wundram and Löffler, 2008). Whether in paper format, or more recently online, resources such as Public Lab (https://publiclab.org/wiki/kite-mapping) and the Drachen Foundation (http://www.drachen.org/learn/kite-basics) are a key source of information for the design and operation of kite platforms. This is very much a grassroots movement enabling users to collect data (often in a participatory fashion) when they want and where they want. With the increase in available technology, kites can continue to be successful and reliable proximal remote sensing platforms, playing an important role in validating complimentary datasets such as satellite observation data (Thayn, 2012).
The kite was part of one of the earliest proximal sensing scientific studies and is set to be a key part of the modern geographer’s toolkit. The low-tech, and often open-source, nature of the equipment involved offers a complementary, and in some cases, better, platform for proximal remote sensing than a drone. In an age where drones are in the news every week, let us not forget the humble yet viable alternative that is the kite.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
This work was supported by the Natural Environment Research Council (grant number 570009815 to JPD).