
Abstract
This article proposes a robust load frequency control using a new optimal proportional–integral–derivative controller–based genetic moth swarm algorithm for islanded microgrids considering high wind power penetration. In such microgrids, the replacement of conventional generator units with a large number of renewable energy sources reduces the system inertia, which in turn causes undesirable influence on microgrid frequency stability, leading to weakening of the microgrid. Furthermore, sudden load shedding, load restoring, and short circuits caused large frequency fluctuations which threaten the system security and could lead to complete blackouts as well as damages to the system equipment. In order to solve this challenge, this study proposes a new coordinated optimal load frequency control plus modified control signal to superconducting magnetic energy storage for compensating the microgrid frequency deviation (∆f). To prove the effectiveness of the proposed coordinated control strategy, an islanded microgrid was tested for the MATLAB/Simulink simulation. The physical constraints of the turbines such as generation rate constraints and speed governor dead band are considered in this study. The results confirmed the effectiveness and robustness of the proposed coordination performance against all scenarios of different load profiles, wind power fluctuation, and system uncertainties in microgrid integrated with high penetration of wind farms. Moreover, the results have been compared with both: the optimal load frequency control with/without the effect of conventional superconducting magnetic energy storage.
Keywords
Introduction
In past, several cascaded blackouts happened in electrical power systems due to frequency instability in case of the imbalance between the electrical load and power supply or N-1 contingency (Brearley and Prabu, 2017). Nowadays, this problem increased after the growth of renewable energy sources (RESs), which have several impacts on the performance of the islanded microgrids (MG) such as the reduction of system inertia. Consequently, the voltage and frequency fluctuations increase (Bevrani et al., 2014b). Furthermore, the RESs exchange electrical power to MGs through power electronic inverters, which cause higher power fluctuations than the traditional synchronous generators. Therefore, if the RESs penetration becomes larger, the islanded MGs might become insecure as stabilizing system frequency and voltage is difficult in that situation (Bevrani et al., 2014a; Rakhshani et al., 2016). Moreover, there will be imbalance between the generation and load due to the variable nature of RESs. These changes lead to the appearance of challenges for the conventional control and protection systems such as nature transient variations in MG. These variations are highly affected by the operation mode of MG whether grid-connected or stand-alone (Sortomme et al., 2010; Zamani et al., 2011). Therefore, this research will study the frequency stability of the islanded MGs considering high wind power penetration using an efficient coordination of optimal load frequency control (LFC) and dynamic contribution of SMES.
LFC is considered as one of the most important control strategies in power system which maintains the system frequency and the power variations at their standard values. In previous decades, LFC problem has a great interest and several studies to enhance the power system operation, control, and stability. In this context, many control strategies were applied to the LFC of the MGs and interconnected power systems such as fuzzy controller, neuro-fuzzy control, and artificial neural network controller (Juang and Lu, 2006; Khuntia and Panda, 2012; Yousel et al., 2014; Zeynelgil et al., 2002). These methods seem to be efficient to deal with this problem. However, they suffer from (1) their long computation time and (2) complex procedures; (3) its proper design depends mainly on the designer experience, and they have high cost compared with the conventional controllers. Moreover, Ali et al. (2014) discussed the robustness of the coefficient diagram method (CDM) controller including energy storage system (ESS) such as electric vehicles (EV) in his control strategy in a small power system. In addition, Garasi et al. (2014) studied the same issue for the modern power system. However, the structure of this control technique is complicated, as it requires more steps to obtain its parameters. Mohamed et al. (2011) used model predictive control (MPC)-based LFC for both single- and multi-area interconnected power system. However, the proportional–integral (PI) and proportional–integral–derivative (PID) are the most popular in industrial applications (Sreenath et al., 2008; Rubaai and Udo, 1994) due to some merits such as its simple design and lower cost and wide stability margin. However, these controllers suffer from the system non-linearity and the sensitivity to the variation of system parameters. Therefore, numerous studies have been used in order to optimize the parameters of these controllers for the LFC of different power systems. Some designers used the conventional methods such as linear programming (LP; Oliveira et al., 2014), interior point algorithm (IP; Topno and Chanana, 2016), and quadratic programming method (QP; Khodabakhshian et al., 2012). However, these methods suffer from stagnation and may be trapped in local minima. In addition, they need numerous iterations to guarantee that the solution is converged. Hence, these techniques are computationally intensive and many recent heuristic optimization algorithms were used for this problem, such as genetic algorithm (GA; Daneshfar and Bevrani, 2010), fruit fly optimization (Han et al., 2012), firefly algorithm (Padhan et al., 2014), and particle swarm optimization (Gozde and Taplamacioglu, 2010).
Indeed, most of the previous LFC approaches were for the interconnected power systems, which are linear and simple structure and depends mainly on the conventional synchronous generators (Daneshfar and Bevrani, 2010; Gozde and Taplamacioglu, 2010; Han et al., 2012; Padhan et al., 2014). Few studies deal with this problem in MGs and wind energy conversion systems such as the study by Mohamed et al. (2012), which has studied the LFC for interconnected power system concerning wind turbines (WT). Bhatt et al. (2011) studied the effect of dynamic contribution of doubly-fed induction generator (DFIG) for two-area interconnected hydrothermal power system. Furthermore, in Hasanien et al. (2017), the LFC problem takes into account the uncertainty of the wind energy conversion system and problem is solved using the symbiotic organisms search algorithm. In addition, some studies have proposed the ESS as a new LFC schemes as frequency stabilizer. Xie et al. (2016) have presented the energy storage in EV battery as an auxiliary LFC technique. El-Saady et al. (2013) have discussed the superconducting magnetic energy storage (SMES) as a new supplementary LFC scheme.
The continuous developments and progress of computational swarm algorithms are the main impetus for the authors to apply the genetic moth swarm algorithm (GMSA) to find the optimal PID parameters in the LFC loops. The GMSA is a novel hybrid optimization algorithm, which is developed based on the incorporation of GA operations with adaptive mutation operator on the reconnaissance phase using genetic pathfinder moths and the expanding of artificial light sources over the swarm. It was presented by the authors in Mohamed et al. (2018). GMSA has some advantages over the other swarm algorithms such as the simplicity and flexibility as it can be applied to different problems without changing the main algorithm structure, avoiding the trap in local minima, achieving fast convergence characteristics, and its lowest control parameters to adjust and easy to implement (Mohamed et al., 2018). To the best of the author’s knowledge, the proposed GMSA has not been reported so far for the LFC problem of MG systems including RESs. Hence, the main contribution of this work, a new coordinated optimal LFC using a new optimal PID controller–based GMSA, with the dynamic contribution of the SMES in an islanded MG concerning high wind power integration has been proposed to enhance the frequency stability under the impact of different load profiles, random load variation, wind power fluctuation, and system uncertainties. A comparative study of different control strategies has been carried out to validate the effectiveness of the proposed coordination regarding the peak undershoot, peak overshoot, and settling time. The MG used in this study consists of domestic loads, thermal power plant, and wind farms.
System configuration
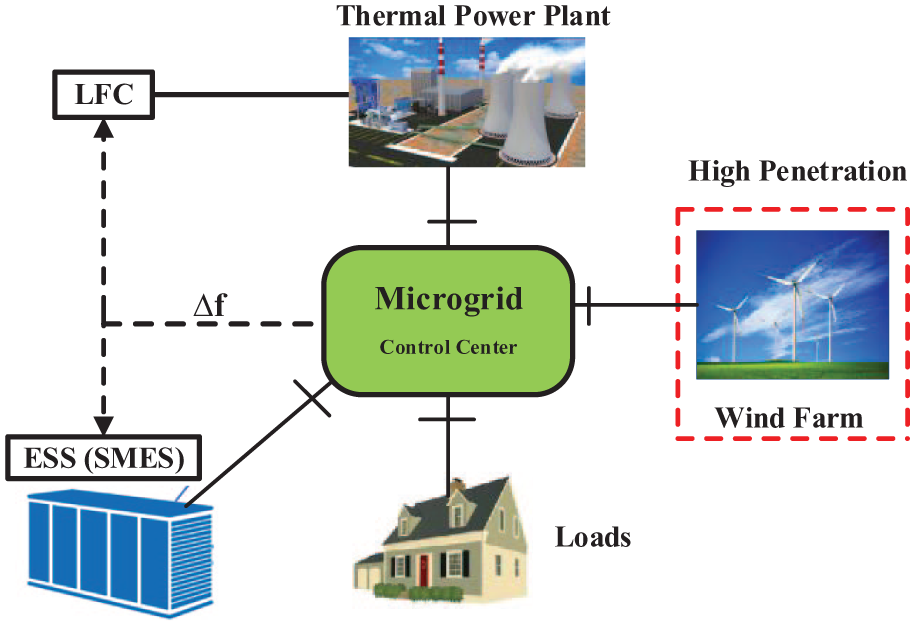
The MG is a small power system, which contains distributed generation units (DGs), domestic loads, EES, and power conditioning units. The MG is distributed through low-voltage distribution systems, and the electric power is mainly generated by DGs such as photovoltaic (PV), wind turbines (WT), hydro units, and fuel cells. This research focuses on the islanded MG (base: 20 MW), which includes 15 MW of domestic loads, 20 MW of thermal power plant, and 9 MW of wind farms (wind farm 1 with a peak power of 2.5 MW and wind farm 2 with a peak power of 6.5 MW) as shown in Figure 1.
Simplified model of the islanded microgrid with high RESs penetration.
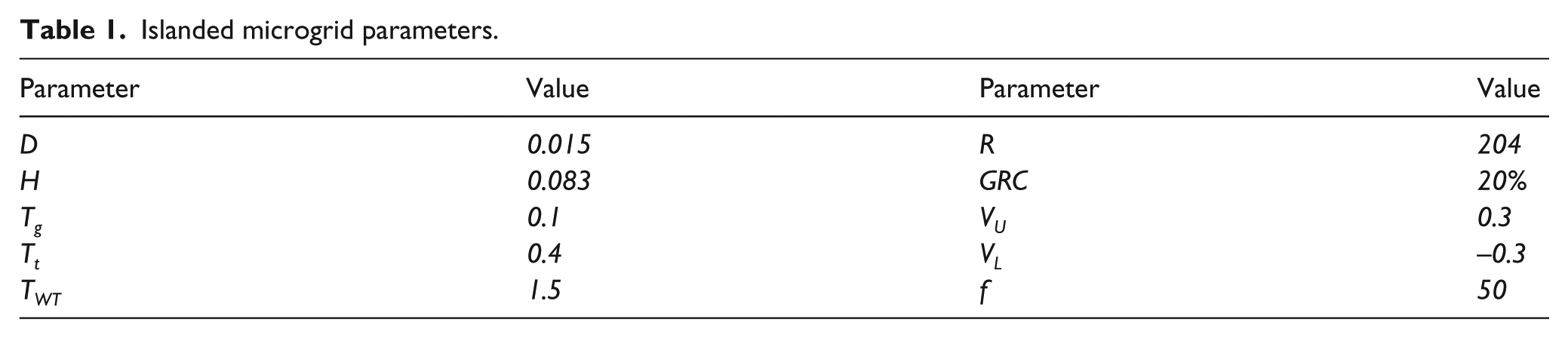
In this study, the effects of the physical constraints such as generation rate constraints (GRC) of power plant and speed governor dead band (blackash) are taken into consideration for modeling the actual islanded MG. Whereas blackash is defined as the total magnitude of sustained speed change. All speed governors have a blackash, which is important for primary frequency control in the presence of disturbances. The GRC limits the generation rate of output power which is given as 0.2 p.u.MW/min for the non-reheat power plant. In this research, the power variation of RESs such as the wind power variation (∆PWind) and the load power variation (∆PL) are considered as disturbance signals for islanded MG. The dynamic model of the studied MG system is as shown in Figure 2. The MG nominal parameter values are shown in Table 1.
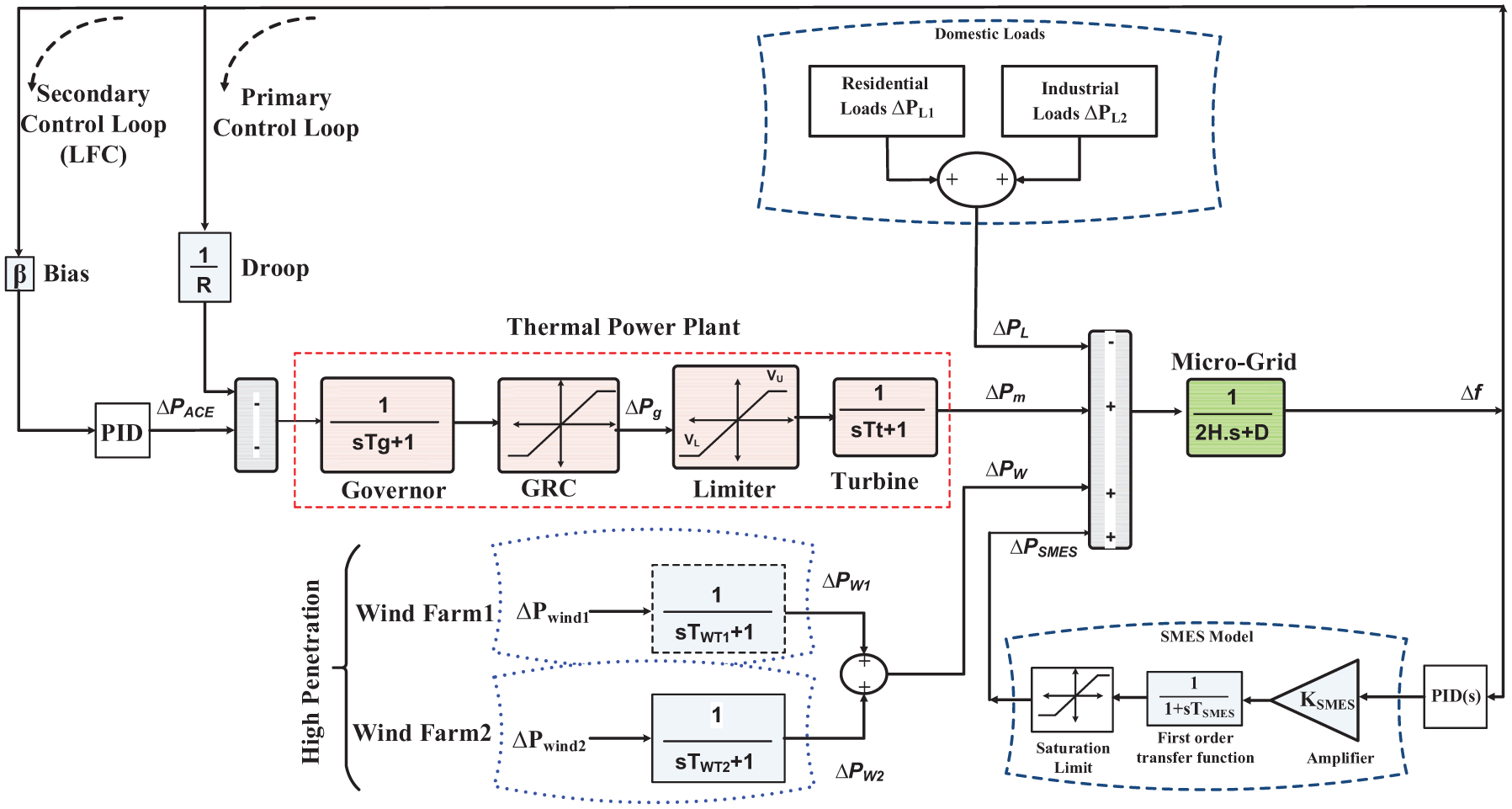
Dynamic model of the islanded microgrid considering high penetration of RESs.
Islanded microgrid parameters.
State space of dynamic modeling
Considering the primary control, the secondary control (LFC), and the EES, the frequency deviation of the isolated MG can be obtained as follows






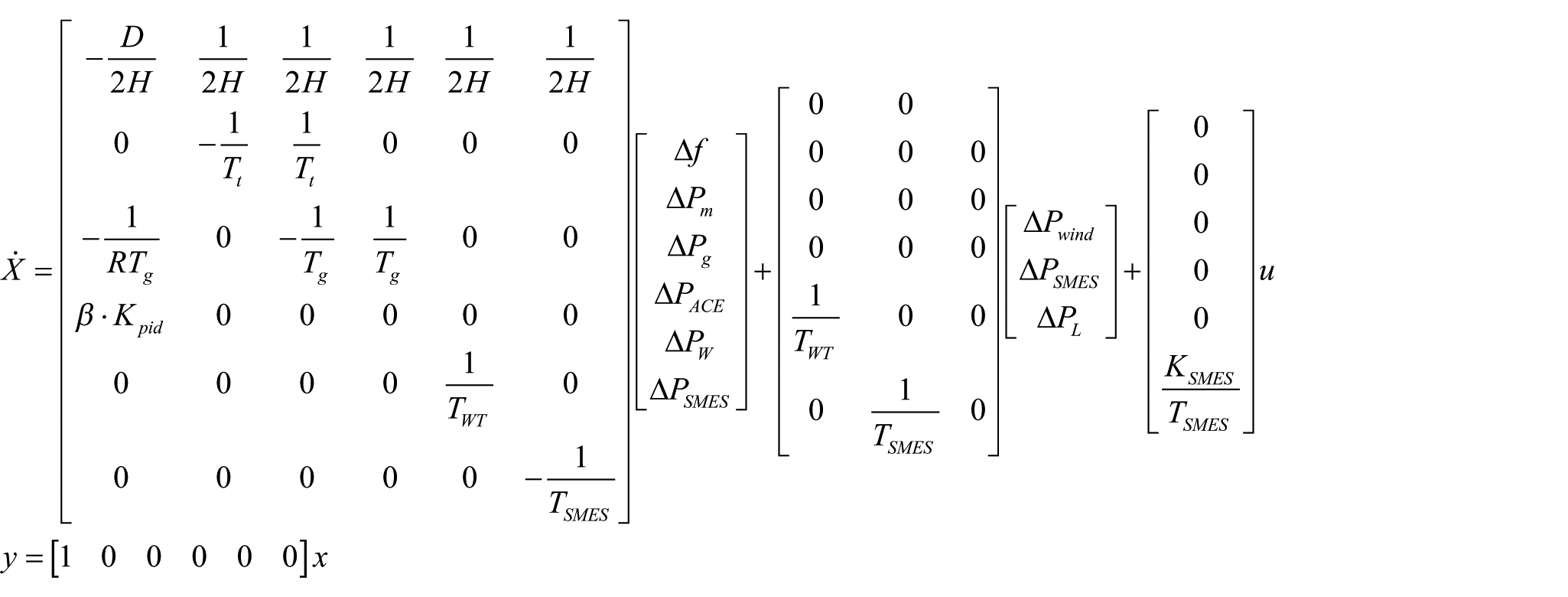
The state-space model of the islanded MG is given in equations (7) and (8)


where



Wind power generation system
Figure 3 shows the model of wind power generation system (WPGS) for frequency control (Kerdphol et al., 2017). In this model, the wind speed is multiplied by the random speed fluctuation which is derived from the white noise block in MATLAB/Simulink to estimate the random wind output power fluctuation. The WPGS model can be described by the following equations (Li et al., 2011). The wind turbine output power is calculated as follows

where ρ is the air density (kg/m3), AT is the rotor swept area (m2), VW is the rated wind speed (m/s), and CP represents the power coefficient of the rotor blades. CP is defined in the following in terms of turbine coefficients C1 to C7

where β is the pitch angle; λT corresponds to the optimal tip-speed ratio (TSR) and is defined by the following


The model of WPGS using MATLAB/Simulink.
Variable speed wind turbines operate at an optimal TSR value during all wind speed conditions, and rT is the rotor radius. In equation (4), λI is intermittent TSR and is related to λT and β as demonstrated in the following

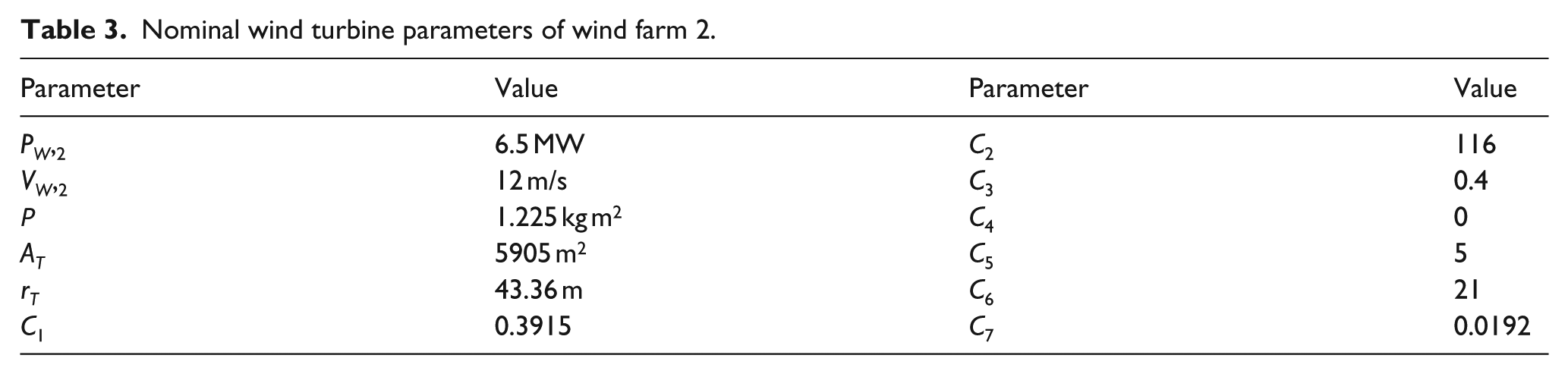
This research studies the effect of merging high wind power penetration on the system frequency response of an islanded MG system. In this article, the MG includes aggregated wind turbine models with different power rates, which are wind turbine units of 2.5 MW (wind farm 1) and wind turbine units of 6.5 MW (wind farm 2) beside the conventional generation units. The MG is tested in the presence of low fluctuated wind power (wind farm 1) and high fluctuated wind power (wind farm 2) as shown in Figure 4. The parameter values of each wind turbine model are presented in Tables 2 and 3.

The wind power output profiles of the MG.
Nominal wind turbine parameters of wind farm 1.

Nominal wind turbine parameters of wind farm 2.
Modeling of power system loads
In this research, the input power fluctuation of the MG is estimated by considering the deviation from the initial load value as shown in Figure 5. The standard deviation is multiplied by the random output fluctuation derived from the white noise block in MATLAB/Simulink in order to simulate the real-time random power fluctuation on the load profile. Whereas low random load change (residential load) and high random load change (industrial load) are tested on the MG as shown in Figure 6. The load deviation is simulated close to an actual load change by the following function (Kerdphol et al., 2017; Li et al., 2011)

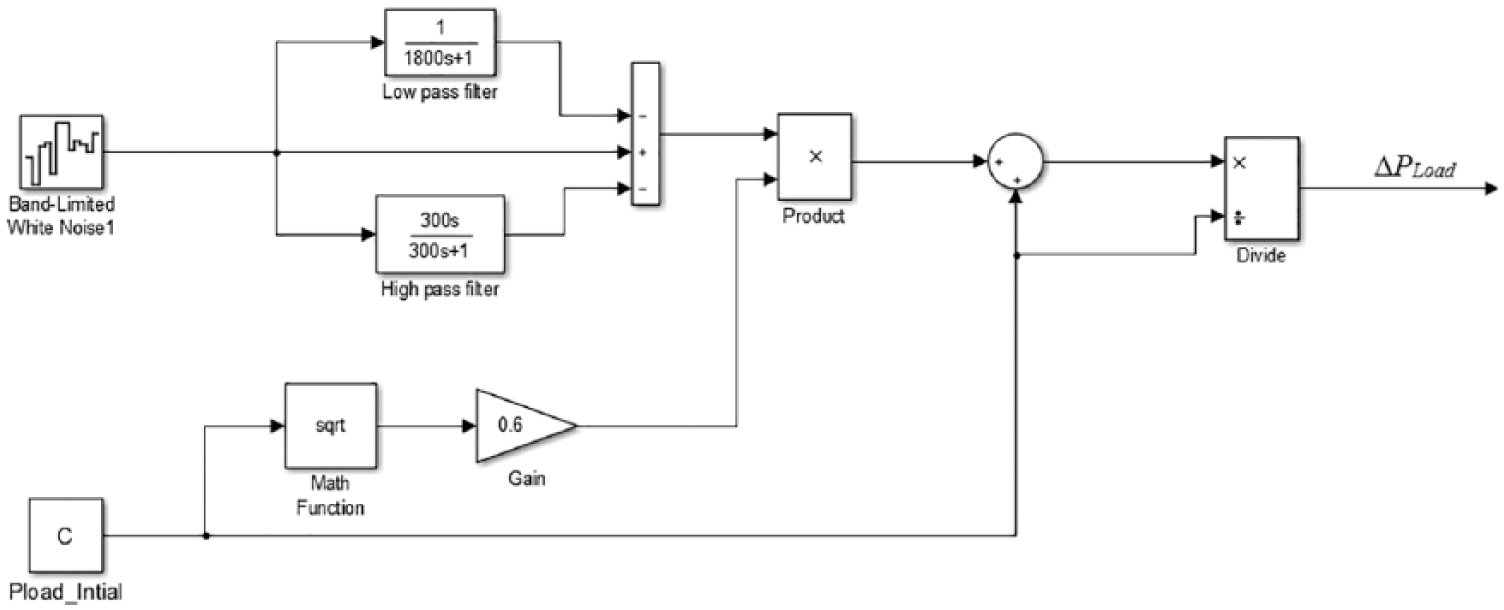
The model of random load using MATLAB/Simulink.
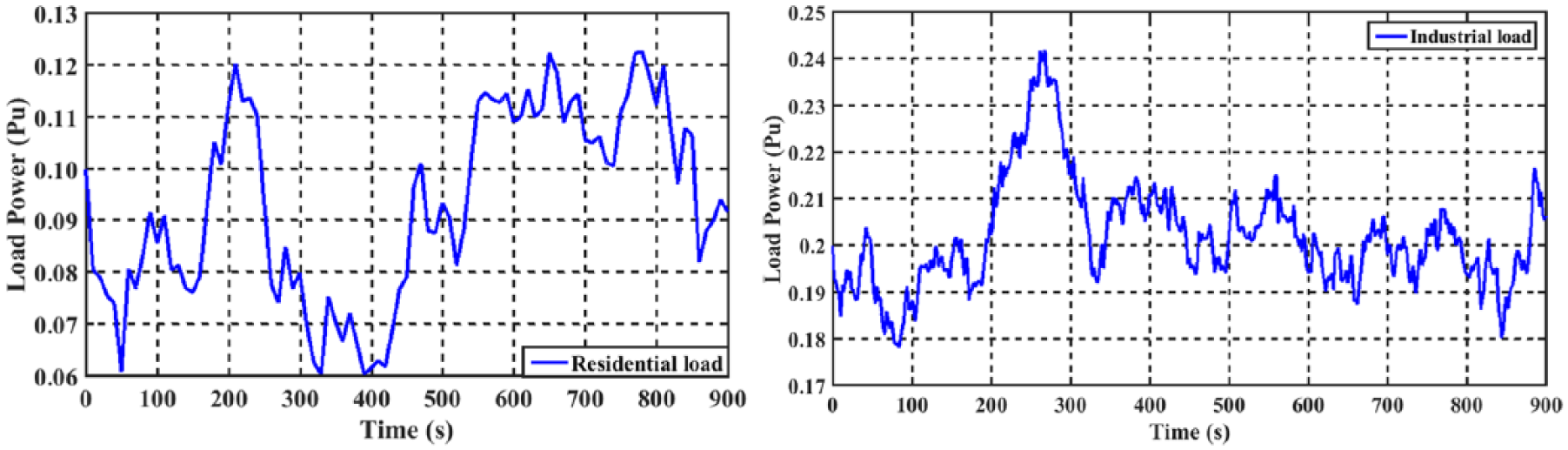
The random load fluctuations of the studied cases.
Frequency control based on SMES
SMES device can control the active and reactive power simultaneously. Also, it is one of the most effective stabilizers for frequency oscillations. Moreover, it has fast response, high efficiency and long lifetime compared to other EES. This makes it a preferable choice for energy storage solution in different power systems. Hence, it has attracted many researchers to study its potential applications in power systems. With the technology improvement and discovering new superconducting materials, the predicted cost of SMES unit is likely to drop down to 25% of the existing cost (Aly et al., 2016). In near future, it is expected that the SMES device would penetrate the market and be used for LFC application. As SMES has the ability to charge and discharge electrical power from/to the grid with very short time considering the SMES power limits, it has been used in this study as frequency stabilizer for more damping out the system frequency oscillations in addition to LFC under the occurrence of the load disturbances by discharging its stored magnetic energy. For the linearized model representation of SMES, such a control scheme is shown in Figure 7. The SMES device is simulated as a first-order transfer function by a time constant TSMES of 0.03 s, and the value of SMES variable gain KSMES is 6, which is obtained using trial-and-error method. The SMES power is obtained by estimating rate of change of frequency (RoCoF)


Structure of SMES model as frequency stabilizer.
The SMES as the frequency stabilizer provides the required power for any frequency deviation to the MG as shown in the following

Control methodology
Problem formulation
In this study, the LFC strategy of the islanded MG is based mainly on the PID controller, which has the well-known variables such as the proportional gain kp, the integral gain ki, and the derivative gain kd. The transfer function can be represented as follows

The objective function of the optimization problem of LFC employed in this article relies on the integral square error (ISE) criterion, which can be formulated as follows

where Δf is the system frequency deviation and ts is the simulation time. The proposed GMSA is applied to minimize the objective function of the ISE subjected to the constraints of the PID controller parameters’ limits as shown in equation (21)

The obtained values of the PID gain controller based on GMSA technique are given in Table 4.
PID controller’s parameters for MG.

PID: proportional–integral–derivative; MG: microgrids.
Overview of GMSA
In this article, the GMSA has been adapted to find the optimum parameters of the controller. It is a simple and fast searching intelligent technique that has been modeled to tune the parameters of PID controller. It is based on the GA and moth swarm algorithm (MSA). In GMSA, the global search ability has been regulated by the incorporation of GA operations by the adaptive mutation operator on the reconnaissance phase using genetic pathfinder moths. In addition, the selection of artificial light sources has been expanded over the swarm. The representation of individuals within the three phases of GMSA has been modified in terms of quality and ratio. Furthermore, multiple elites (good solutions) are appointed to avoid the local optima and enhance the exploitation power. The proposed hybrid-based algorithm aims to integrate advantages of the well-known GA in terms of sharing information and global search ability to find the optimal value of a given function using the following steps.
Initialization
Initially, the positions of moths are randomly created for dimensional (d) and population number (n) as seen in equation (22)

Transverse orientation
Individuals that have been selected as elites or parents have another role at this stage as prospectors. The number of these moths nf is proposed to decrease with time progress as follows

After the pathfinders have finished their search, the information about luminescence intensity is shared with prospectors, which attempt to update its positions in order to discover new light sources. The new position of jth prospector moth can be expressed mathematically as follows

where θ ∈ [r, 1] is a random number to define the spiral shape and r = −1 − t/T. The GMSA deals with each variable in the previous formula as an integrated unit.
Celestial navigation
The diminishing of the number of prospectors during the optimization process increases the onlooker’s number (no = ne − nf). The first part of onlookers, with the size of nG = round (no/2), walks according to Gaussian distributions. The new onlooker moth in this sub-group xi(t + 1) moves with series steps of Gaussian walks, which can be described as follows


where ε1 is a random number generated from Gaussian distribution, and ε2 and ε3 are random samples drawn from a uniform distribution within the interval [0, 1]; best g is the global best solution (moonlight) obtained in the transverse orientation phase. The updating equation of this type can be completed in the following form

where r1 and r2 are random numbers within the interval [0, 1], 2g/G is the social factor, 1g/G is the cognitive factor, and best p is a light source selected from the modified swarm based on the probability pi.
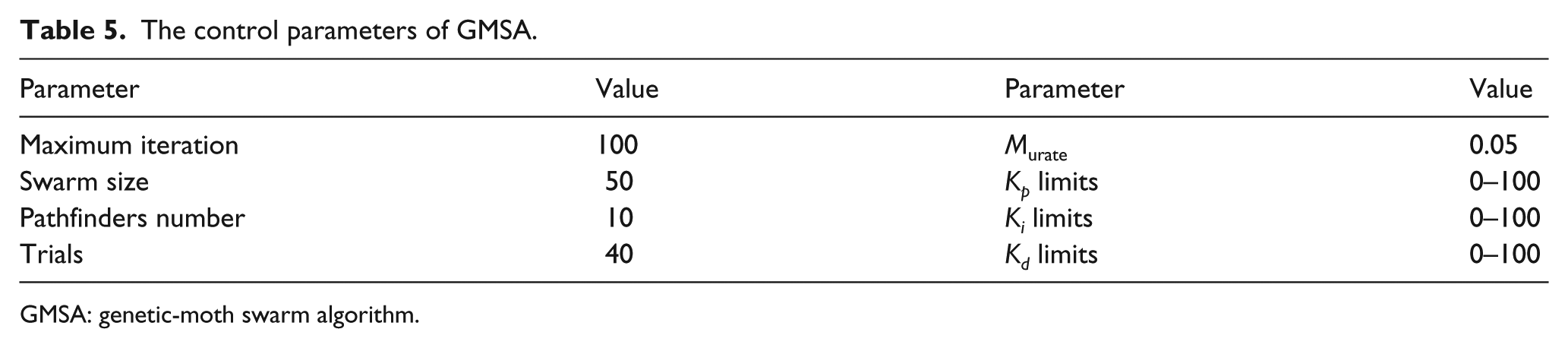
In this study, the main objective of the GMSA is to minimize the frequency deviation of the MG LFC through tuning PID controller parameter (Kp, Ki, and Kd). Table 5 summarizes the GMSA parameters, which are used for solving the LFC problem after making many trials and errors.
The control parameters of GMSA.
GMSA: genetic-moth swarm algorithm.
Results and discussion
The system performance of the proposed coordination is tested and compared with the conventional LFC system with/without conventional SMES model for an islanded MG considering high wind penetration. Simulation results and analysis are carried out using MATLAB/Simulink model which takes the GRCs of different generation sources into account. Analyses of different control strategies have been implemented on the MG. First, the optimal PID controller based on GMSA optimization algorithm is designed for overall MG LFC without the contribution of SMES. Then, the second control strategy, in addition to the effect of LFC and the effect of dynamic contribution of SMES model as load frequency stabilizer, has been added and taken into consideration. Finally, the control signal to SMES is modified by using a new optimal PID controller as a lead-lag compensator for the frequency deviations as shown in Figure 2.
Many researches assume that the load profile is a step change disturbance, which is represented by the forced outage of generation unit or sudden switch off a massive load. However, in fact, the load disturbances are complex and random in nature. The actual load disturbance can be represented by several types of disturbance beside step change disturbance. Therefore, this research applied some random loads variations, which are low random load change (residential load) and high random load change (industrial load) on the islanded MG in the presence of low and high wind power fluctuation models for wind farm 1 and 2, respectively. The simulation study has been carried out to validate the effectiveness of the proposed coordination scheme using MATLAB/Simulink software. The following two scenarios are applied on the studied system, and the simulation time of each one is 15 min.
Scenario A
In this scenario, the islanded MG considering high wind power penetration shown in Figure 2 is considered as the test system to confirm the robustness and effectiveness of the proposed coordination. The proposed coordination of LFC using a new optimal PID controller-based GMSA and modified control signal to SMES-based PID controller for compensating the MG frequency deviation (∆f) is tested by implementing the highly fluctuated wind power (wind farm 2) at 500 s. However, the other disturbance sources are low fluctuated wind power (wind farm 1), residential load, and industrial load applied initially. Figure 8 shows the frequency deviation of three different control strategies for the MG considering the high wind power integration. It is clearly shown that the dynamic contribution of conventional SMES improves the frequency response and reduces the transient frequency deviation compared with the MG LFC system without SMES. Moreover, in case of no SMES controller, the frequency fluctuates more with high deviation. However, the proposed control strategy, a new coordination of LFC using a new optimal PID controller-based GMSA and SMES-based PID controller, gives a superior performance and more reduction of the frequency excursions ∆f and wind power fluctuation than other strategies. The performance specifications (maximum overshoot, maximum undershoot, and maximum settling time) of the studied system with different control strategies of SMES under study of
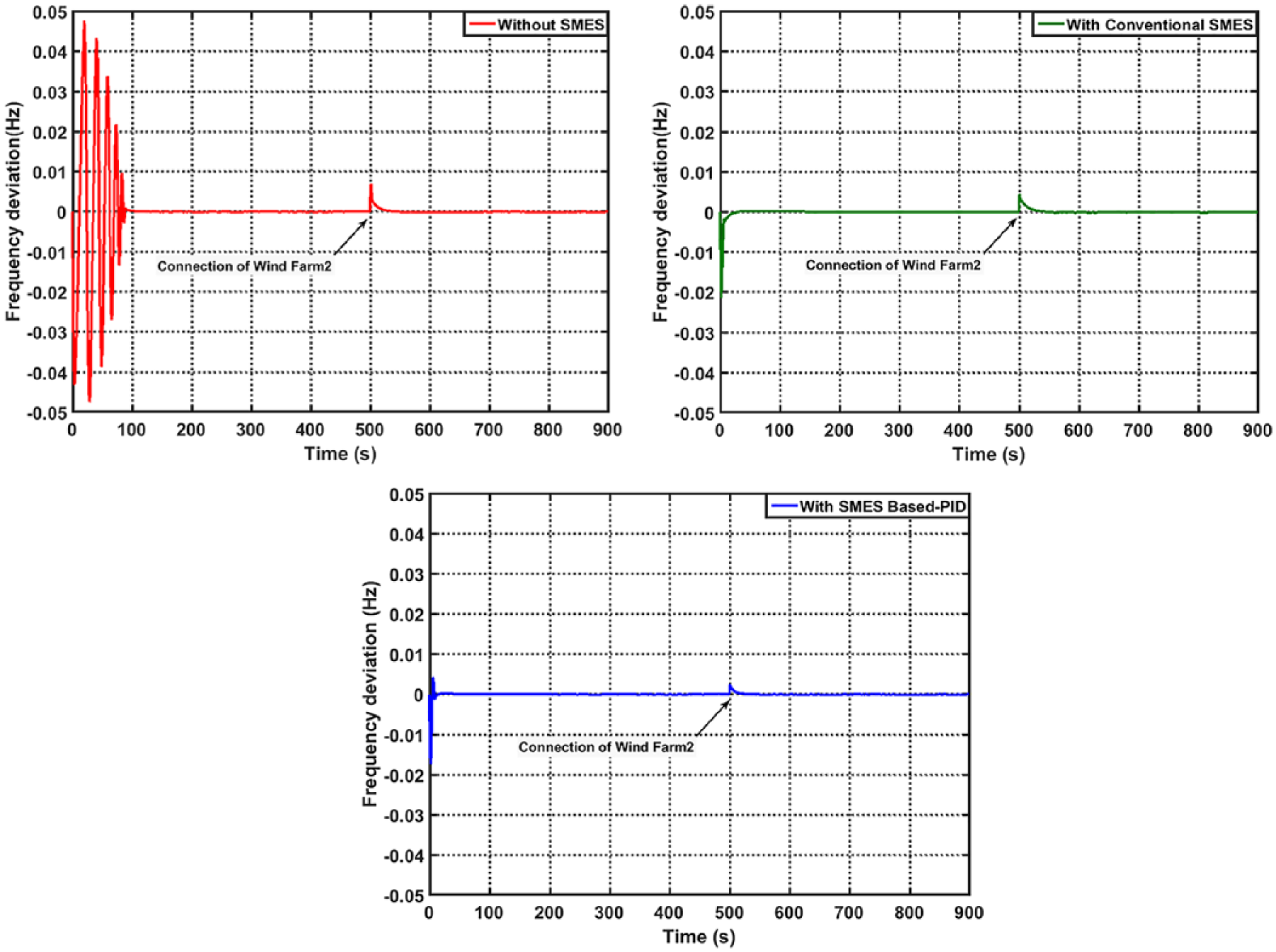
Frequency deviation of scenario A.
The performance specification of the studied system for scenario A.
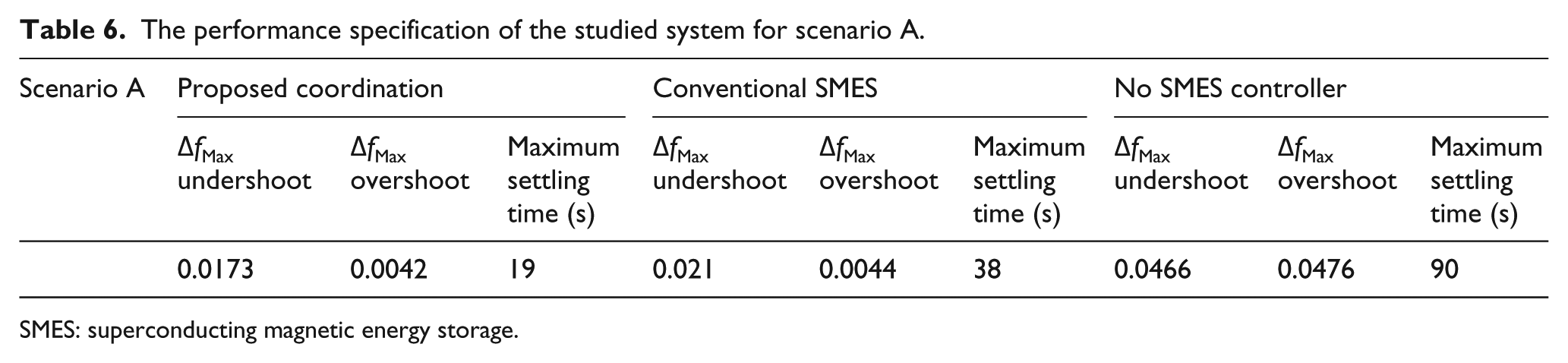
SMES: superconducting magnetic energy storage.
Scenario B
In this scenario, the effectiveness and robustness of the proposed coordination of LFC using a new optimal PID-based GMSA and modified control signal to SMES-based PID controller are evaluated by implementing high and low fluctuated wind farms and different random loads (residential and industrial loads), which participate under the assumed multiple operating conditions in Table 7. This scenario is divided into three sub-scenarios in the following.
Multiple operating conditions of the MG considering high wind penetration.
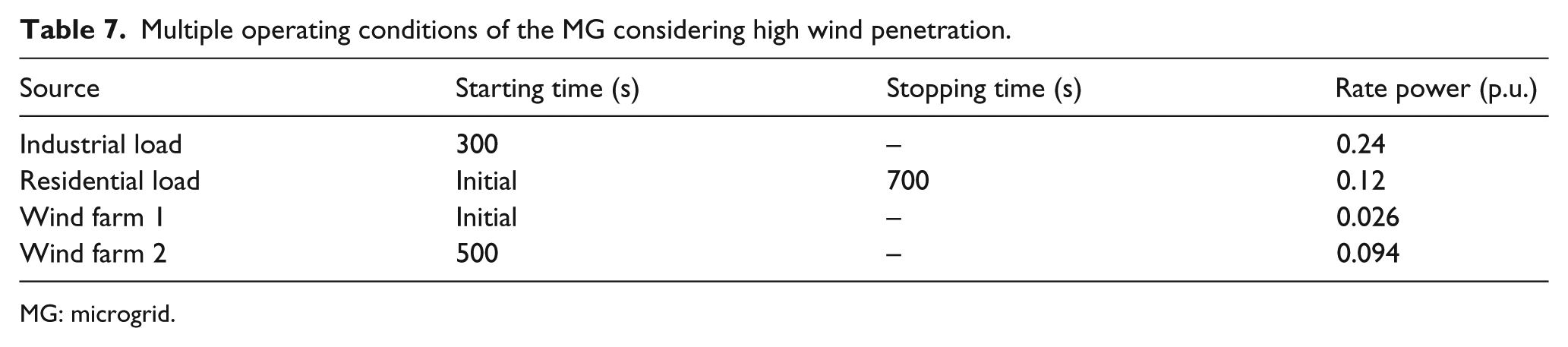
MG: microgrid.
Scenario B1
In this case, the MG is considered as the test system with high system inertia (100% of default system inertia) considering the multiple operating conditions of wind and load variations as shown in Table 7. The frequency deviation of the MG with different control strategies of SMES is illustrated in Figure 9. From Figure 9, it has been noticed that the frequency deviation of the MG considering high wind power penetration with the proposed coordination is about ± 0.005 Hz, while the MG with/without the dynamic contribution of convention SMES is ±0.012 and ±0.025 Hz, respectively. Therefore, the proposed coordination gives a fast response for damping the frequency fluctuation during the multiple operating conditions of the MG compared to others control strategies.
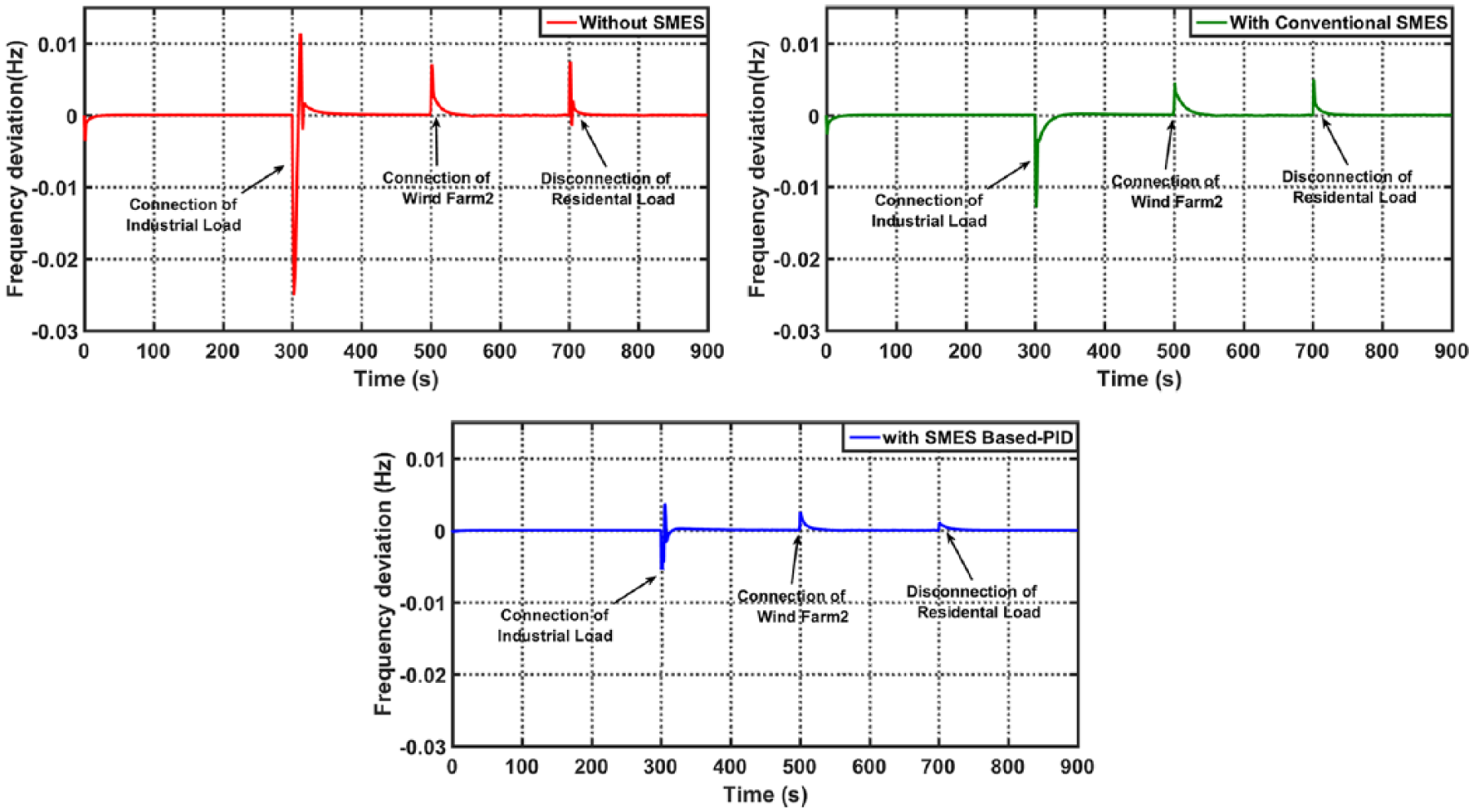
Frequency deviation of scenario B1.
Scenario B2
In this case, the MG considering high wind power penetration is tested under the condition of 75% of default system inertia with multiple operating conditions of wind and load variations as shown in Table 6. The frequency deviation of the three control strategies for the studied system considering the low and high fluctuation of wind power and load with high penetration of RESs is investigated in Figure 10. From Figure 10, it can be observed that in the case of no SMES controller, the frequency deviation is about ±0.03 Hz, while the MG with the dynamic contribution of conventional SMES gives the frequency deviation of about ±0.014 Hz when the industrial load is connected to the MG at 300 s. Compared to the MG considering high penetration wind level with SMES controller, the proposed coordination shows a response better than other methods during all disturbance instants. Furthermore, it gives a robust stability, and it has faster settling time than other control strategies.

Frequency deviation of scenario B2.
Scenario B3
The robustness of the proposed coordination of LFC using a new optimal PID-based GMSA with the dynamic contribution of SMES-based PID controller is tested in the extreme scenario. In this case, the system inertia is decreased to half of the default system inertia (50% of default system inertia). This can happen in the case of integration of high wind power; the power of electronic interface-based RESs will reduce the overall system inertia and fluctuates the system frequency. Figure 11 shows the frequency deviation of the MG considering high RES penetration under the condition of 50% of default system inertia with multiple operating conditions of wind and load variations as shown in Table 6. From Figure 11, the simulation results concluded that the frequency fluctuates more with high deviation, whereas the studied system with no SMES Controller oscillates to such an extent that it is not acceptable. While the MG considering high level of wind power integration with the conventional SMES controller takes a long time to reach at steady state of system frequency compared with the proposed coordination of optimal LFC with SMES-based PID controller.

Frequency deviation of scenario B3.
The performance specifications (maximum overshoot, maximum undershoot and maximum settling time) of the studied system with different control strategies of SMES under all studied cases of
The performance specification of the studied system for scenario B.
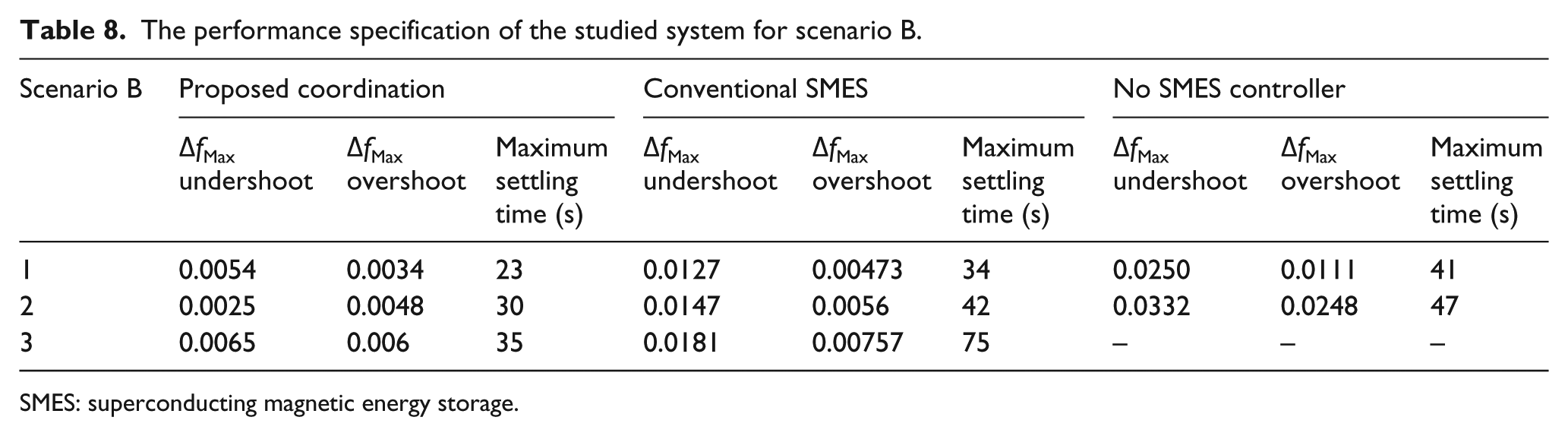
SMES: superconducting magnetic energy storage.
Conclusion
This article has proposed a new coordination of optimal LFC using a new PID controller–based GMSA with modified control signal to SMES-based PID controller to enhance the frequency stability in an islanded MG system concerning high wind power penetration. A recently developed hybrid algorithm, namely, GMSA, has been applied to optimize the PID controller parameters with the aim of both frequency regulation and enhancement of the input control signal to SMES. To prove the effectiveness of the proposed coordination, the MG was analyzed in the presence of high renewable energy penetration using different scenarios considering the multiple operating conditions of wind and load variations, which are high and low fluctuated wind power (wind farms 1 and 2) and high and low random load change (residential and industrial loads). The results observed by simulations proved that the proposed coordination achieved a robust frequency stability in the presence of high wind power penetration and different load power fluctuations against all cases of studied scenarios in terms of peaks overshoot, peaks undershoot, and settling time. Whereas the studied MG system with the dynamic contribution of conventional SMES as a frequency stabilizer model gave a satisfactory performance, but needs a little long time to suppress the frequency deviations compared with the proposed coordination.
Footnotes
Appendix 1
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the Egyptian Mission Sector, Ministry of higher Education in Egypt, Kyushu Institute of Technology.