
Abstract
To know the inherent property of the power system connected with a wind farm along with its associated controllers, a small signal stability study is required. For this, a linearized system model has to be developed. The small signal model of the system with wind farm along with its controllers is discussed here. The eigenvalues of system matrix are computed from the linearized model of the power system. The absolute value of the real part of eigenvalues indicates distance from instability. The sensitivity of this minimum real part of eigenvalues with respect to small changes of wind power injection is used as an index to assess the small signal stability under various operating conditions. The optimum value of the wind power can also be determined with the help of the proposed eigenvalue sensitivity index. The systems used for the study are WSCC 3-machine 9-bus system and IEEE 16-machine 68-bus system.
Introduction
The depleting fossil fuels and their environmental impact raise the penetration of more and more renewable sources into the grid. This brings concern about the stability of the existing power system, as these sources are intermittent and variable in nature. Wind energy, being cheapest till date, is used extensively all across the globe. As the share of wind power increases, its impact on the power system stability becomes a major concern. A study of the inherent stability of large power systems with wind farms and its associated controllers (e.g. the doubly fed induction generator (DFIG) converter controllers, pitch controller) is also quite important. This requires a small signal stability analysis using linearized system equations. Small signal stability study of power system with increased wind power penetration is presented in Gautam et al. (2009), Bu et al. (2012) and Wang et al. (2008). A simplified model of DFIG is proposed for the small signal stability study of the power system in Wang et al. (2008). Modal analysis of the DFIG-based wind power generation system, to observe the change in modal properties for different system parameters, operating points and grid strengths, is presented in Mei and Pal (2007). Small signal stability study of power systems with variable wind power is presented in Garmroodi et al. (2014). The sensitivity indices based on the eigenvalues are used for the power system small signal stability studies as in Gautam et al. (2009), Nam et al. (2000), Nolan et al. (1976) and Wang et al. (2000). However, a detailed study including the dynamics of both the power system and the wind farm along with its controllers may be of help.
In this article, a detailed modelling of DFIG-based wind farm along with its converters is presented to study the small signal stability analysis in different cases, such as (a) wind speed below rated value and (b) wind speed above rated value. The dominant states (the state variables of the power system integrated with DFIG-based wind farms), that is, the states which are affected most, are also found out to understand the internal small signal dynamics of the system considered. A new sensitivity-based index is proposed to see the impact of wind power penetration on the system small signal stability and thereby identify the optimum limit of wind power injection to the existing system without affecting the overall stability (small signal) of the system.
Small signal model of multi-machine power system
Small signal model for the system without wind farm
The flux decay model of multi-machine power system (Kundur, 1994), with m machines, is considered. The linearized model of the system can be written in a compact form as




where,
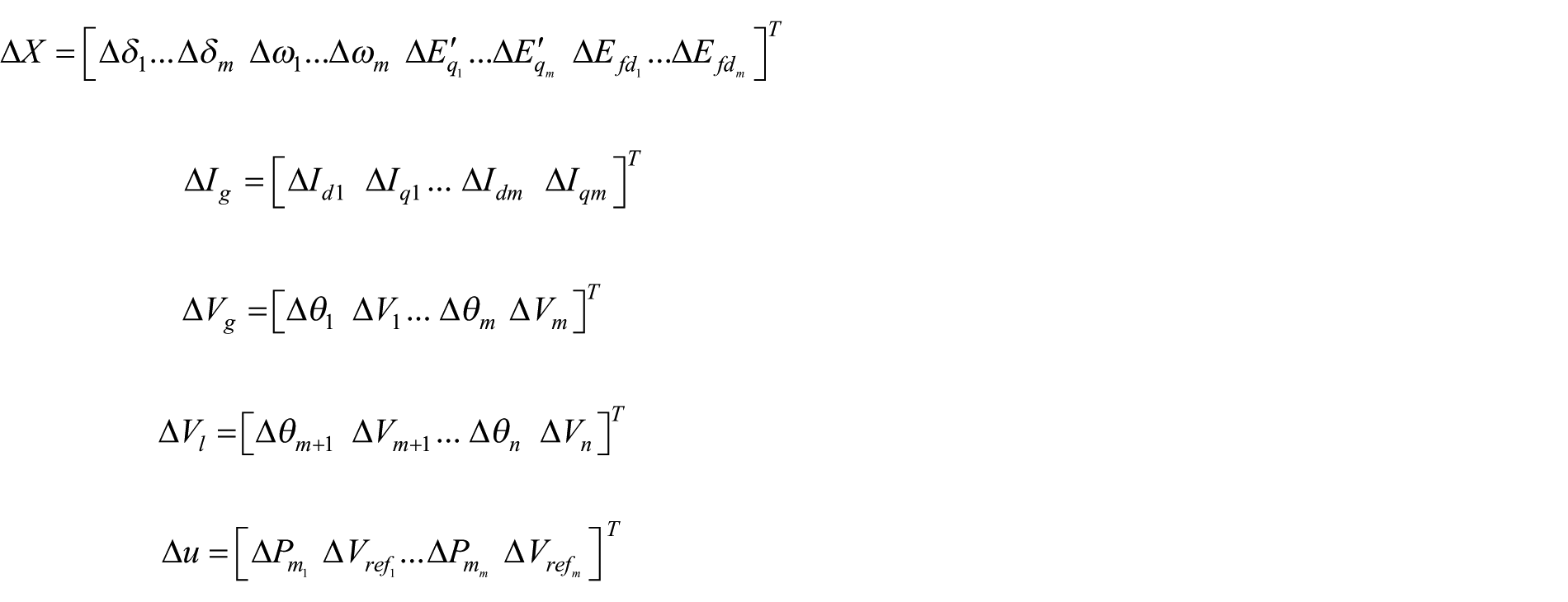
Here, δ is the angular position of the rotor, ωi is per unit speed deviation of the rotor, Pm is mechanical power input,

This can be reduced to the form

where the system matrix Asys of the power system is given by

Small signal model for the power system with wind farm
Linearized model of DFIG
The DFIG-based wind farm is connected to one load bus of the power system (Figure 1). An aggregated wind turbine and aggregated DFIG are considered for representing the wind farm. The wind farm is connected to one of the existing power system buses (bus ‘m’ in Figure 1) through a transformer and a double circuit line. The terminal bus of the wind farm (bus ‘n’ in Figure 1) is included in the power system as an additional bus. If multiple wind farms are present (say ndg number), then there will be ndg number of additional buses in the power system.
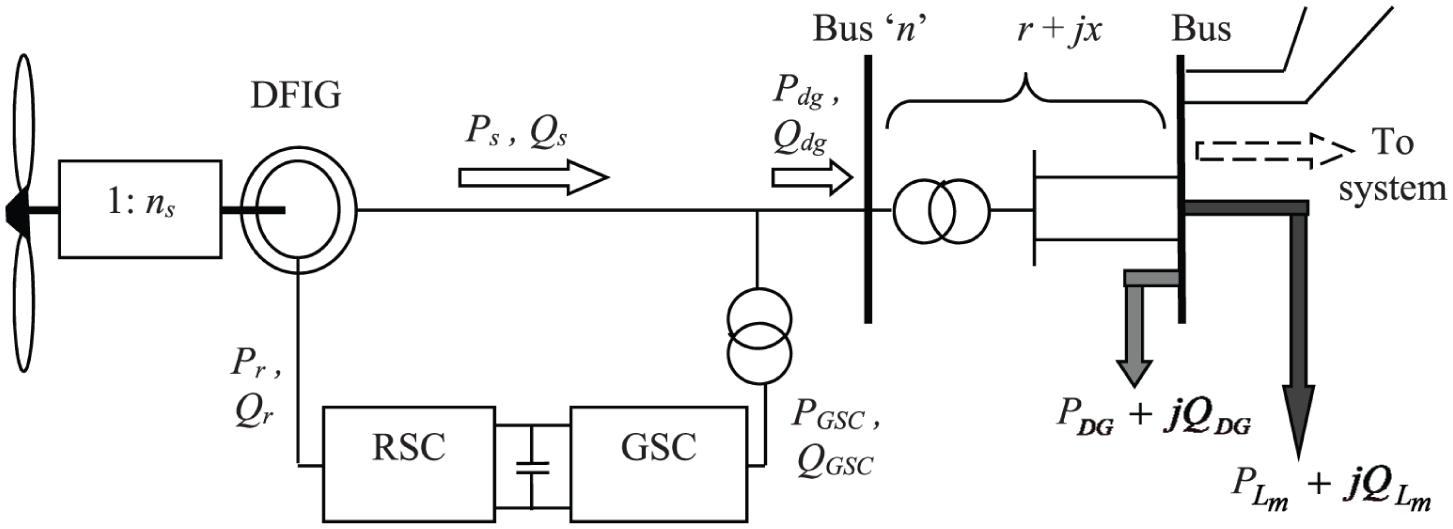
Connection of DFIG to the system load bus.
The set of differential algebraic equations (DAEs) of the DFIG (Mitra and Chatterjee, 2016) can be linearized to obtain









where i = n + 1, . . . n +ndg; ωbase is the electrical base speed; ωs is the synchronous speed in per unit; vds and vqs are the stator d-axis and q-axis voltages, respectively; vdr and vqr are the rotor d-axis and q-axis voltages, respectively; ids and iqs are the stator d-axis and q-axis currents, respectively; Lss is stator inductance and Rs is the stator resistance. Tr (=Lrr/Rr) is the rotor time constant where Lrr is rotor inductance and Rr is the rotor resistance.
The complete expressions of ΔPdgi and ΔQdgi in terms of the DFIG state variables and algebraic variables can be obtained from equations (15) and (16). ΔTmi in equation (14) can be expressed in terms of the DFIG state variables (turbine speed ωti and pitch angle βi) and wind speed (Vw).
DFIG controllers
The rotor circuit of the DFIG is connected to the stator terminal through back to back voltage source converters (Figure 1). These are the rotor side converter (RSC) and the grid side converter (GSC) connected with each other by the DC bus capacitor. Pitch controller is present for the purpose of controlling the DFIG rotor speed when wind speed exceeds the rated value.
RSC controller
The purpose of this controller is to control the DFIG rotor speed by controlling the electrical torque for maximum power extraction from wind. The RSC controller also controls the reactive power exchanged at the stator terminal of DFIG. Field-oriented control (FOC) (Mitra and Chatterjee, 2016; Nunes et al., 2004) technique is used, where the d-axis of the synchronously rotating reference frame is considered to be oriented along the stator (or bus ‘n’ in Figure 1) voltage Vn. The q-axis is considered to be leading the d-axis. Hence, the voltages along the d axis and q axis (vds and vqs, respectively) are given by

For a sufficiently low stator resistance Rs

Putting the values of ids and iqs in terms of the stator fluxes, we get

Using equation (19), Te can be expressed applying equation (18) as a function of d-axis rotor current (idr) as

Putting the value of iqs in terms of ψqs, we get

From equation (21), Qs can be expressed applying equation (17) as a function of q-axis rotor current (iqr) as

The rotor voltage equations can be re-written, with the assumption of constant stator flux, in terms of the rotor variables as


Here, σ is the leakage factor given by
Using equations (20) and (22) to (24), the control structure of the RSC controllers is given as shown in Figure 2 (Mitra and Chatterjee, 2016).
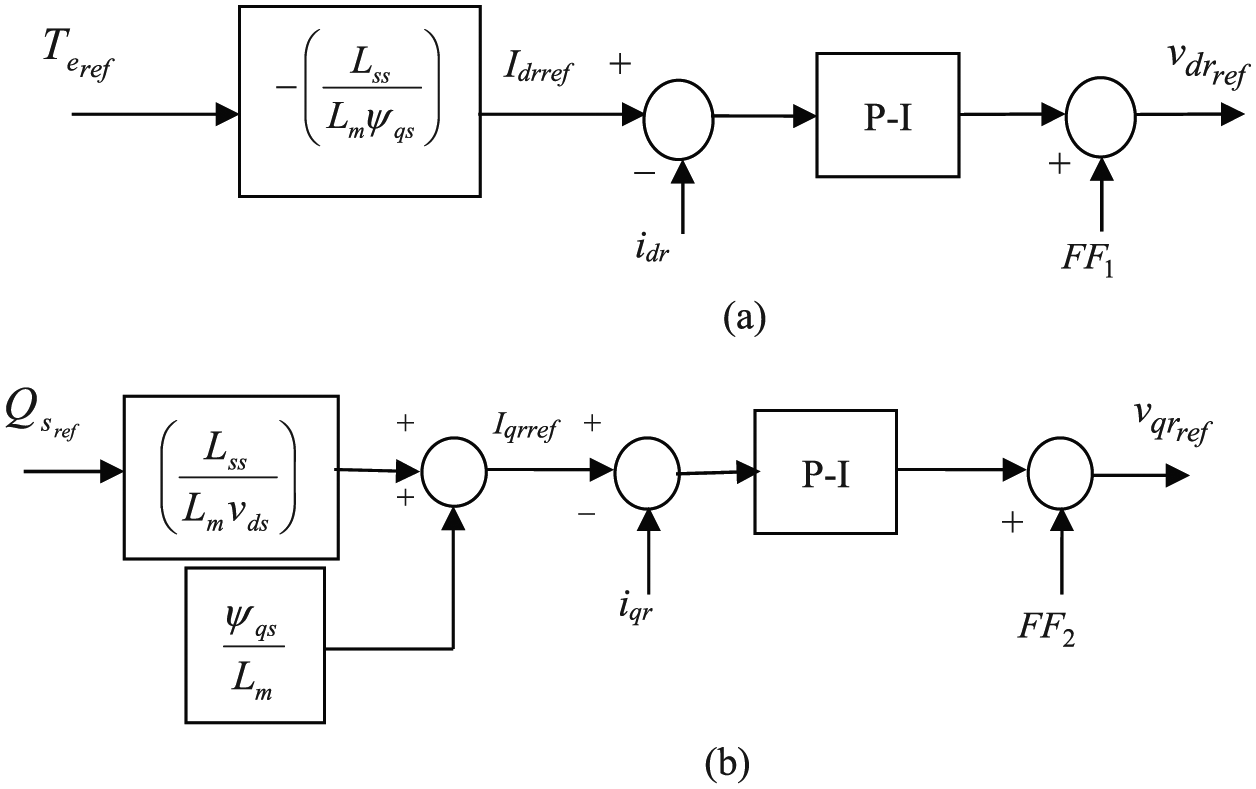
(a) d-axis control block of DFIG rotor side converter and (b) q-axis control block of DFIG rotor side converter.
With


In order to extract maximum power from the wind, the torque reference (

where Kopt in pu is given by

where SB and ωtB are the base power and the base speed of the wind turbine, respectively.
However, the relation of equation (27) is valid for the speed range

Here,
For including the controllers in the small signal stability study, the relationships established in the controllers are expressed in terms of differential and algebraic equations. The equations corresponding to the d-axis control structure are


where


where
The expressions of the P-I controller parameters of Figure 2 are obtained using pole-zero cancellation as shown below

Here,
GSC controller
The purpose of the GSC controller is to enable active power exchange between the RSC and the grid via the GSC. The controller also ensures specified amount of reactive power exchange between GSC and grid. Similar to RSC, the stator voltage orientation is considered for the control structure of GSC. This enables the decoupled control of active and reactive power flowing through the converter (Mitra and Chatterjee, 2016; Vittal and Ayyanar, 2013; Yazdani and Iravani, 2010). The DC bus voltage (VDC) is taken as the control variable, and by maintaining VDC constant (equal to VDCref), it is ensured that the GSC allows bi-directional flow of active power between the grid and the RSC (and subsequently the rotor) via the DC bus as per the demand of the RSC. On the contrary, the reactive power flow is controlled such that the GSC is operated at unity power factor (q-axis reference current Iqfref = 0). The voltage equations of the connecting circuit between GSC and grid can be given by


where idf and iqf are GSC output d-axis and q-axis currents, vdf and vqf are d-axis and q-axis components of the GSC terminal voltage, and Rg and Lg are the resistance and inductance, respectively, of the path connecting the GSC and the grid. The GSC control structure is shown in Figure 3. The expressions of the cross-coupling terms (FF3 and FF4) in Figure 3 are given by


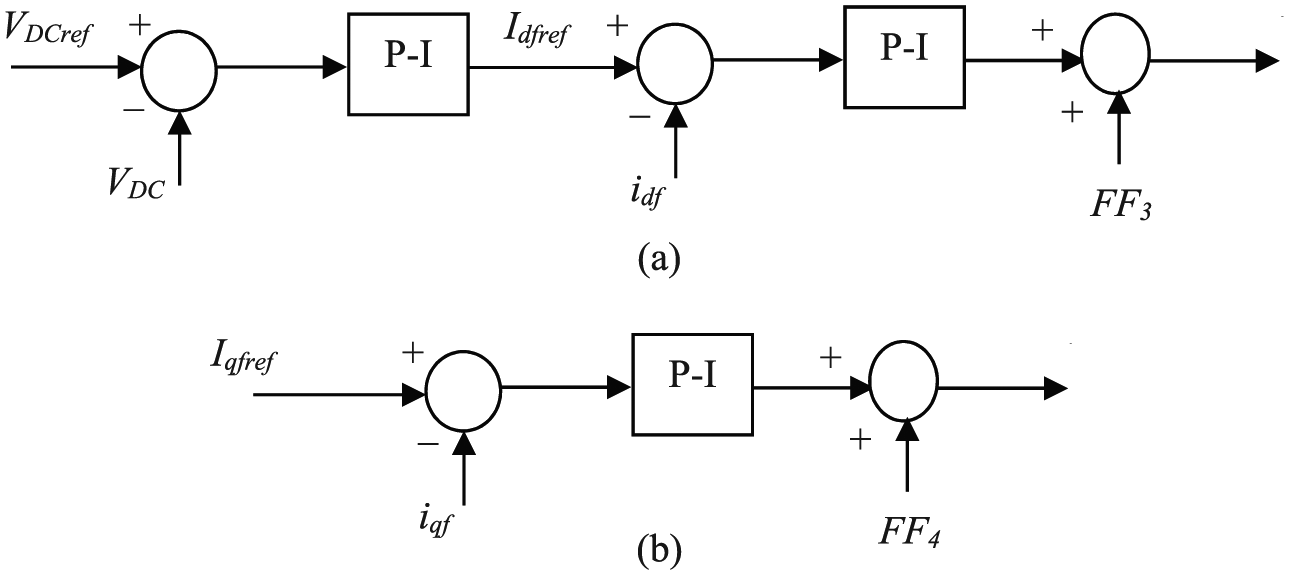
(a) d-axis control block of DFIG grid side converter and (b) q-axis control block of DFIG grid side converter.
GSC maintains the DC link voltage (VDC) fixed at its reference value (VDCref). The error signal of VDC and VDCref passes through a P-I controller to produce the d-axis current reference (Idfref). The q-axis reference current depends on the value of the reactive power exchange between GSC and grid. The GSC d-axis and q-axis output currents (idf and iqf) are compared with the corresponding reference currents Idfref and Iqfref, respectively, and the error signals pass through the P-I controllers to generate d-axis and q-axis reference voltages

Here,
As per the standard practice, the controller dynamics of the GSC are not considered in small signal stability study (Mitra and Chatterjee, 2016). This is because the GSC controller parameters (KP and KI) are not decided by the specific DFIG driven wind farm as can be seen from equation (51). The main function of the GSC controllers is to influence the DC link dynamics (Mitra and Chatterjee, 2016; Vittal and Ayyanar, 2013). On the contrary, RSC controller parameters (KP and KI) are specific to DFIG and are decided by the machine parameters as can be seen from equation (34). Hence, RSC controller dynamics are considered for the small signal stability study.
Pitch controller
The output power of DFIG is maintained at its rated value (Prated) when the wind speed exceeds the rated speed (Vw_rated), because otherwise the machine may get damaged. Since the power is the product of torque and speed (P =Te × ωr), both Te and ωr are maintained at the respective rated value. The torque is kept equal to



Here, ϕωr and β are the state variables and βref is the pitch angle set point.

Pitch controller.
Small signal model of the complete power system
Wind speed below the rated value
At first, the case with wind speed less than the rated value is considered. So the action of the pitch controller is not included. Linearizing equations (30) and (32) for the ith DFIG, we have


Here, Δidri and Δiqri can be expressed in terms of
Considering equations (8) to (14) and (43) and (44), for each i = n + 1, . . ., n + ndg and writing in compact form

So, for all the ndg number of DFIGs, equation (45) can be written as

Equations for expressions of power exchanged by the DFIG with the system network can also be written in matrix form to get

Considering ndg number of DFIG, equation (47) can be written as

Linearizing equations (31) and (33) for each i = n + 1, . . ., n + ndg, we get


Considering equations (49) and (50) for all ndg number of DFIG and putting in compact form, we get

Here, F1, F2, F3, G1, G2, G3, G4, G5, S1, S2, S3, E2, E3 and E4 are block diagonal matrices.
Equations (13) and (14) will be modified due to the introduction of the additional bus (wind farm terminal bus) as given below


Here,
The DFIGs are connected to load buses, so only the load flow Jacobian will change. Therefore, combining the equations (11) and (12), (46), (48), (51) to (53), the system equation in matrix form is given as
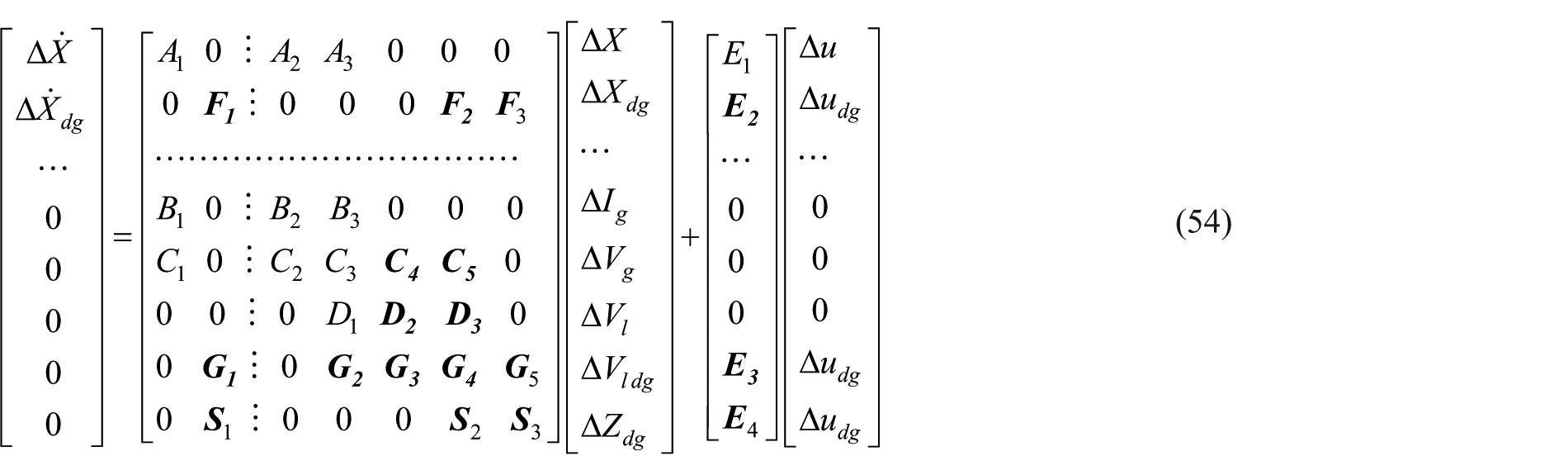
The bold letters in equation (54) indicate the modified and/or new co-efficients added in equation (15). Equation (66) can be reduced as

where
Wind speed above the rated value
Next, we consider the condition of wind speed above the rated value. Here, the pitch controller equations are included. Using the linearized equations (8) to (14), (43) and (44), along with the linearized form of equations (40) and (41) and then writing in matrix form, we have

The size of all the matrices will increase because of the introduction of two more linearized equations (equations (40) and (41)).
Linearized equations for power exchanged by DFIG with system network with modified Xdg can be written in matrix form (size of G1 and E3 will change), for all ndg number of DFIG, we have

Similarly, linearized equations (49) and (50) and the linearized form of equation (42) can be written in matrix form (size of S1, S2, S3 and E4 will change) for all ndg number of DFIG as

Here, F1, F2, F3, G1, G2, G3, G4, G5, S1, S2, S3, E2, E3 and E4 are block diagonal matrices.
The modified variables are

where
The system equation in matrix form can be obtained by combining equations (56) to (58). This compact matrix is similar to the one shown in equation (54) with few modifications in the co-efficient matrices F1, F2, F3, G1, S1, S2, S3, E2, E3 and E4. This equation again can be reduced as before to get
Result of small signal stability analysis
A DFIG-based wind farm of capacity 100 MW is considered to be connected at the load buses (one at a time) of WSCC 3-machine 9-bus system. The capacity of the wind farm is 100 MW and the system base is 100 MVA. The eigenvalues of the system matrix of the linearized model of the system are obtained. The real part of the eigenvalue is denoted by σe. The minimum of absolute value of real part of the eigenvalues of the Asys matrix in the left half plane (abs(σe_min)) provides a clear idea about the small signal stability margin of the power system in the presence of wind farm along with its controllers. The change of σe_min with change of wind power penetration is shown in Table 1. It can be observed from the table that with the increase in the wind power penetration, σe_min is shifted towards the imaginary axis when wind farm is present at bus 5. This indicates a decrease in system stability with increase in wind power at bus 5. On the contrary, σe_min shifted away from the imaginary axis indicating an improvement in small signal stability of the system with increase in wind power when wind farm is connected at bus 8. So, depending on the wind farm location, variation of the system stability may behave differently along with wind power variation. Also, it may be observed that the dominating states change, with increase in wind power, corresponding to the eigenvalue with σe closest to the imaginary axis in the left half plane. For example, for wind farm at bus 5, when Pdg is 0.7 pu, the dominant states corresponding to the eigenvalue with σe_min are
Variation of eigenvalue for different wind power penetration.
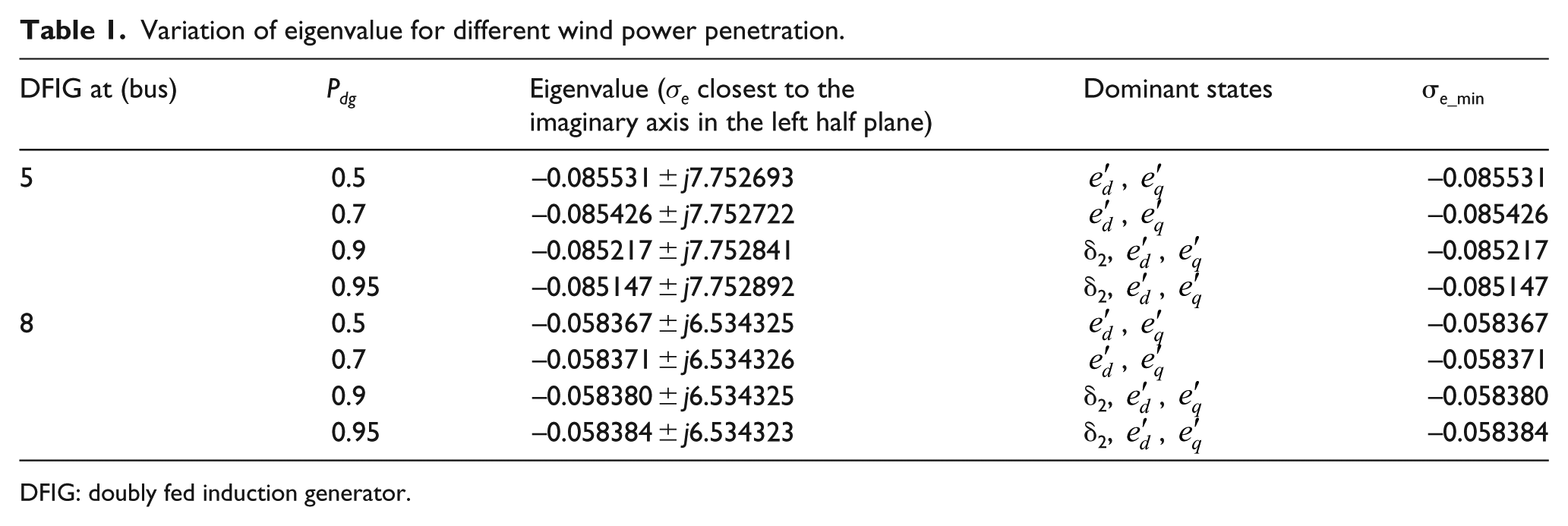
DFIG: doubly fed induction generator.
Calculation of proposed eigenvalue sensitivity
As shown from Table 1, the minimum of absolute values of real part of the eigenvalues in the left hand side of the imaginary axis (abs(σe_min)) changes with increase in penetration. In case of wind farm connected to bus 8, σe_min shifts away from the imaginary axis. However, if we are interested to know the limit of wind power penetration up to which the system remains stable, we have to keep on increasing the wind power and find σe_min. Although the absolute value of σe_min increases initially, at the point of instability, σe_min has to become zero. So definitely, there will be point where absolute value of σe_min will start decreasing. This point must be close to point of instability. One way to identify this point might be to compute eigenvalue sensitivity. The calculation of eigenvalue sensitivity is shown here.
Let ‘A’ be a function of system parameter α. Then, any eigenvalue λi of matrix Ãsys is also a function of α, that is, λi(α), where i = 1, 2,. . ., n.
Let the parameter α change from α0 to α0 + ∆α, then, the corresponding change in system eigenvalue is from λi(α0) to λi(α0 + ∆α).
By Taylor series expansion and neglecting higher terms since ∆α is very small, we get

where ∂λi/∂α is the first-order sensitivity of eigenvalue λi to parameter α (Garmroodi et al., 2014; Gautam et al., 2009).
In this work, to find out the impact of increase in wind power on the system small signal stability, the sensitivity of σe_min is calculated with respect to the change in Pdg. This is denoted by Sλ. The sensitivity is computed numerically by considering two very close points of Pdg (say Pdg1 and Pdg2) and the corresponding value of σe_min, such that

where ΔPdg = Pdg2 – Pdg1 is the change in Pdg and Δσe_min = σe_min2 – σe_min1 is the change in σe_min.
Result with eigenvalue sensitivity
The eigenvalue sensitivity (S λ ) is calculated using equation (60). The change in Pdg is taken here as 0.01 pu. The study is carried out in WSCC 3-machine 9-bus system and IEEE 16-machine 68-bus system.
Study in WSCC 3-machine 9-bus system
The wind farm is considered to be connected at one of the load buses (buses 5, 6 and 8). The capacity of the wind farm is 100 MW.
The effect of increase in wind power on the small signal stability is studied considering a particular wind speed. It is considered that the wind farm is capable of generating maximum power corresponding to that wind speed under rated condition.
At first, the wind farm is considered at bus 8 of the 9-bus system. The plot of variation of S λ with variation of the wind power penetration is shown in Figure 5(a). It can be observed that Sλ is positive and increasing with increase of penetration. This means minimum of the real part of all the eigenvalues moves away from the imaginary axis in the left half plane, thus indicating a more stable system. Similar plots for the wind farm at buses 5 and 6 are shown in Figure 5(b). It can be seen that S λ is negative and its value decreases with increase of Pdg, thus indicating movement of the minimum of the real part of the eigenvalues towards the imaginary axis. Hence, the small signal stability condition deteriorates with increased wind power injection at these buses. For wind farm capacity of 100 MW, the system stability gradually increases with increase in load. Let us now consider that the wind farm has a larger capacity (150 MW). The peak value of the sensitivity plot for this higher wind power penetration is found to be at Pdg = 1.23 pu (Figure 6). That is, S λ starts decreasing as Pdg increases beyond 1.23 pu (penetration = 28.1%). So for the 9-bus system, the optimum wind power penetration at bus 8 is 1.23 pu.
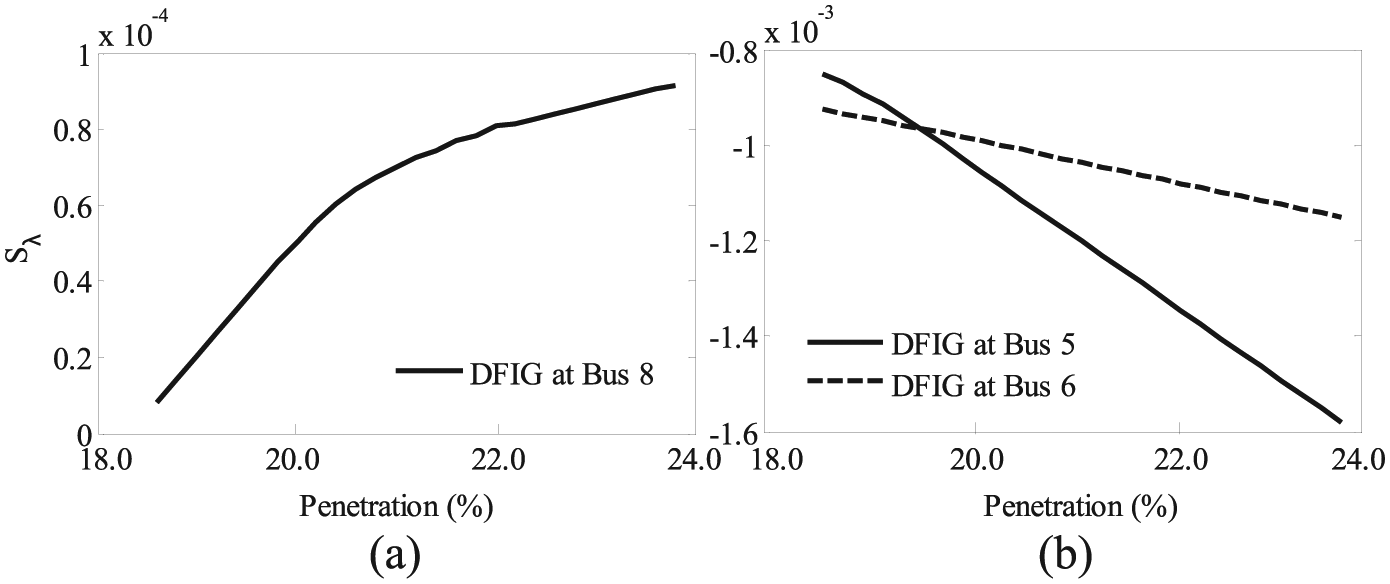
Variation of eigenvalue sensitivity (S λ ) with wind power penetration for (a) DFIG at bus 8, and (b) DFIG at buses 5 and 6.
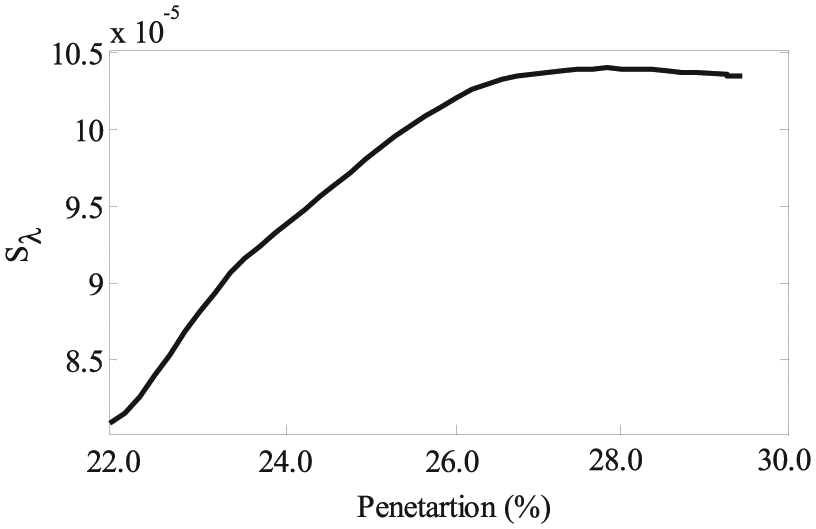
Variation of eigenvalue sensitivity (S λ ) with wind power penetration for DFIG at bus 8.
Study in IEEE 16-machine 68-bus system
Different small groups of buses were considered as different zones (Kundur, 1994) as given below.
Zone I: 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 27, 56, 57, 58, 59
Zone II: 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 54, 55
Zone III: 1, 2, 3, 17, 18, 25, 26, 27, 28, 29, 53, 60, 61
Zone IV: 1, 9, 30, 31, 32, 33, 34, 35, 36, 37, 62, 63, 64
Wind farm is considered to be connected at different load buses one at a time in each zone. The study is carried out in zone I by considering that wind power is available near the buses 15, 16 and 17, one at a time. The wind farm capacity is considered to be 1000 MW (obtained by aggregating 200 units of 5 MW each). The system base is considered to be 100 MVA. The reactive power exchange with the system is considered to be zero.
The variation of eigenvalue sensitivity with the variation in the wind power penetration can be observed in Figure 7 for the three different wind farm locations. It is observed that the sensitivity S
λ
increases with increase in penetration when the wind farm is at bus 16, indicating an improvement in system stability. When the wind farm is present at bus 15 or bus 17, S
λ
decreases with increase in wind power penetration indicating deterioration of the system small signal stability. The dominating state corresponding to the eigenvalue with σe_min is the voltage behind the transient reactance of the synchronous generator 7
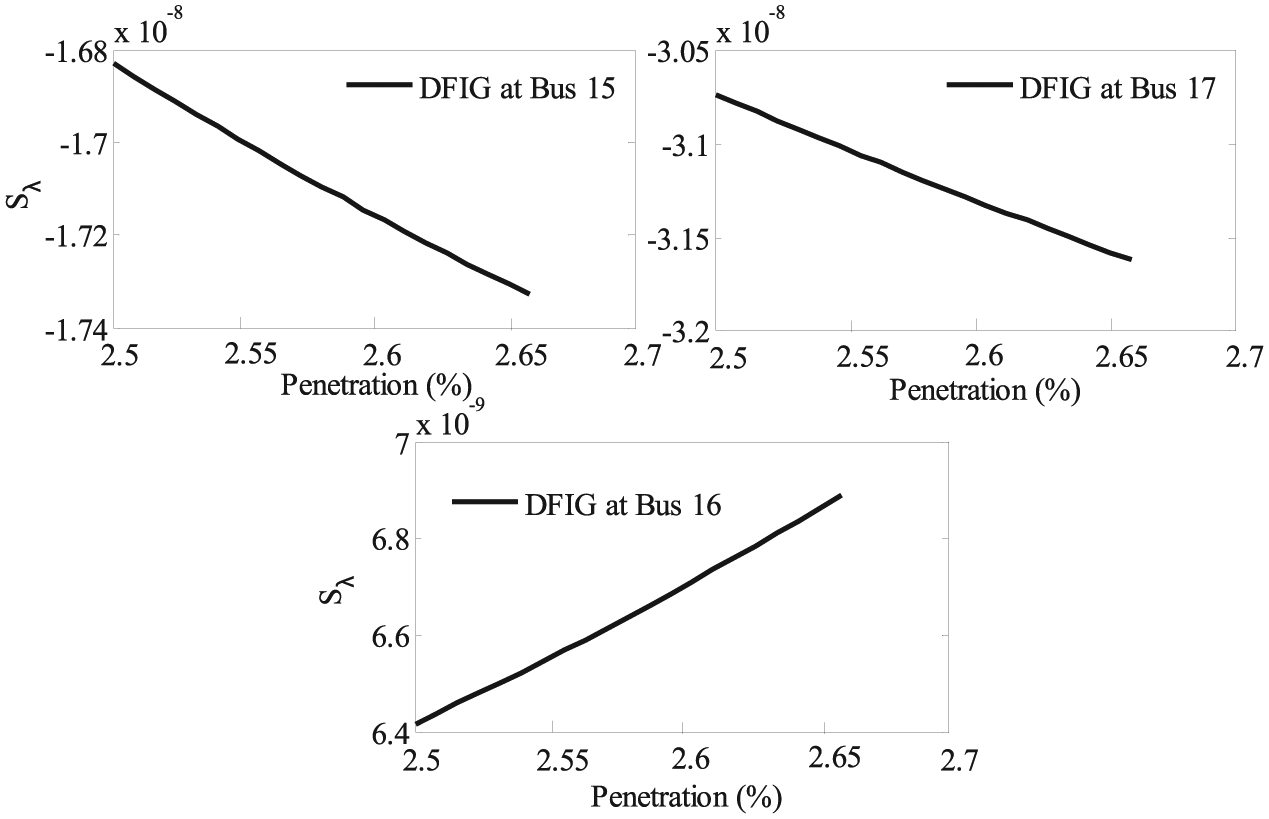
Variation of eigenvalue sensitivity (S λ ) with wind power penetration.
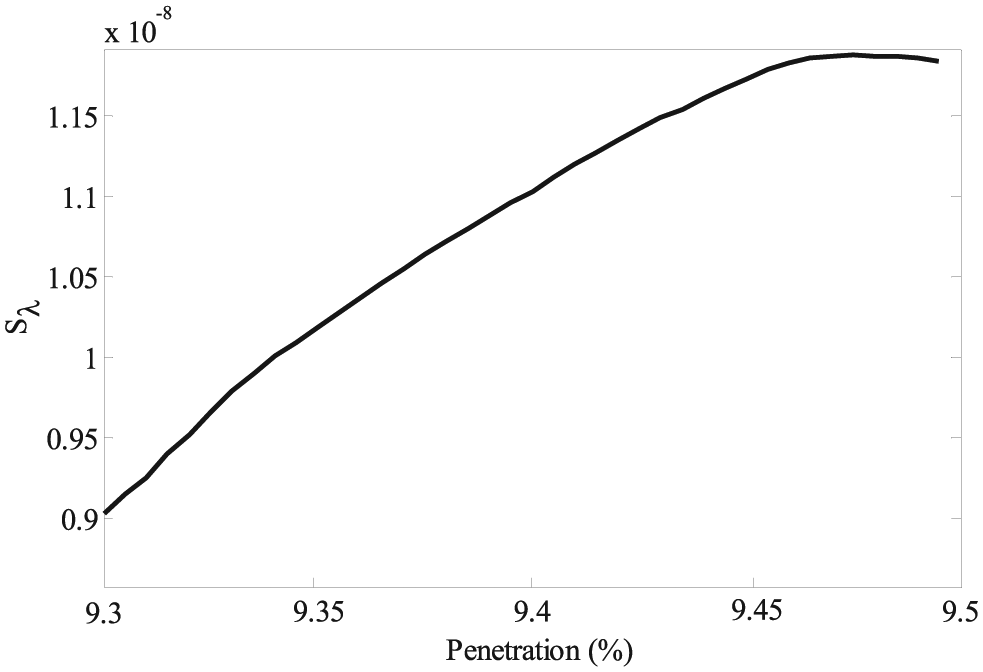
Variation of eigenvalue sensitivity (S λ ) with wind power penetration for DFIG at bus 16.
Conclusion
The eigenvalue sensitivity analysis is carried out to find the impact of increase in wind power at the load bus where the wind farm is connected. It is observed that the impact on the small signal stability of the system with the variation of the wind power is location dependent. Moreover, the cases with which the stability improves with increase in wind power, there exists an optimum value exceeding which eigenvalue sensitivity decreases indicating deterioration of system stability. So with this study, the limit of wind power penetration at the system bus can be determined. One important point to be noted from the result shown is that this study of eigenvalues and the eigenvalue sensitivity gives an idea of location of wind farm suitable in terms of the inherent stability condition of the system (without application of any large disturbance).
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.