
Abstract
The present paper proposes the application to a wind system of the One Step Ahead control scheme featured by a Fuzzy-based Least Square Estimator. The considered wind system power generation supplies an electrical load disconnected from the power supply grid. It is composed of a three bladed horizontal-axis wind turbine which drives a synchronous generator by means of gearbox: the mathematical model for both the horizontal-axis wind-turbine and the synchronous generator will be briefly outlined. The adaptive nature of the One-Step-Ahead control algorithm relies on providing consistent estimation of the controlled system. This is achieved by means of a Least Square Algorithm that is able to provide a good estimation of a linear discrete time model of the controlled system, nevertheless its convergence rate reduces very quickly. For this reason, Least Square Algorithm needs a resetting strategy, which allows the achievement of a compromise between estimation accuracy and convergence rate. This not only represents a very problem-dependent issue but also introduces weaknesses in term of control tracking errors, which in turns needs an extra control contribution (integral correction). The proposed Least Square Algorithm enhancement overcomes these issues managing differently the estimation accuracy and the convergence rate. In the Results section, the achievements of the application of the One-Step-Ahead algorithm to the wind system will prove the reliability of the suggested enhanced control technique.
Introduction
Wind energy is one of the most cost-competitive renewable energy source and it can be converted into electrical energy by means of a wind system. Wind power generation plants can be installed practically everywhere, provided a sufficient wind intensity is available, and they do not produce pollutants during operation according to their sustainable nature. These aspects have contributed, in the last few years, to promote the diffusion of wind energy generation and, consequently, the wind turbine technology experienced a significant enhancement.
For electrical energy generation applications, the wind systems are generally equipped with an AC-DC-AC converter in order to provide the appropriate AC voltage and frequency (no active control). On the other hand, this solution presents energy losses associated with the power electronics (Lalor et al., 2005; Xu et al., 2018). For this reason, employing an active control system for the output voltage and frequency will reduce such energy losses. In this paper, the One Step Ahead controller, equipped with a Fuzzy-based Least Square Estimator, is applied to a wind generation system considered as an isolate source of power and composed of a horizontal-axis wind-turbine connected to a synchronous generator. The static and dynamic behavior of the wind generation system has been simulated by using appropriate mathematical models of the wind-turbine and synchronous generator.
Mathematical models simulating wind turbines dynamics can be divided into momentum, vortex, and finite difference models. The momentum models provide the wind turbine performance by using actuator surfaces and subdivide the flow domain in many stream-tubes (Cooperman and Martinez, 2014; Golnary and Moradi, 2018; Islam et al., 2006; Kishinami et al., 2005; Torresi et al., 2013, 2016). These models represent a good compromise between accuracy and computational costs and therefore they appear to be more suitable to describe the wind turbine dynamics for control applications. The vortex models approximate the turbine blade considering distributed surface vortices (Bermudez et al., 2000; Schweigler, 2012; Schmitz and Chattot, 2006; Sezer Uzol and Uzol, 2009). Finally, the finite difference models solve the fluid-dynamic equations using either finite volume or finite difference methods considering the rotor effects by means of an actuator surface (Hsu et al., 2014; Rajagopalan and Fanucci, 1985; Sayed et al., 2012).
Many authors describe appropriate mathematical models for the synchronous electrical generator (Nunes et al., 2004; Umans, 2014; Yin et al., 2007). In the present paper, a complete dynamical model of both the rotor and the stator winding will be presented, where only the voltage of rotor winding will be considered as a control variable. Finally, the dynamic equilibrium of the rotating parts of both the wind turbine and the synchronous machine will be considered.
Many papers deal with classical controls for wind generation systems using both open loop schemes (Hur et al., 2017; Martinez-Rodrigo et al., 2014; Tan and Islam, 2004), and a closed loop ones (Badihi et al., 2018; Boulamatsis et al., 2018; Gao and Gao, 2016; Hur, 2018; Menezes et al., 2018; Mullane et al., 2006; Pereira et al., 2018). Usually, the controlled system model is known only in terms of maps and/or numerical/experimental data. Consequently, the controller parameters need empirical/heuristic tuning to perform properly. On the other hand, adaptive controllers estimate, at each sample time, an appropriate model of the controlled system (Barambones et al., 2018; Narayana et al., 2017). Therefore, these controllers determine, on the basis of the estimated model, the control law. Such a feature makes the adaptive controllers suitable for non-linear and time varying systems, retuning themselves whenever the system conditions change because of disturbance actions. The One-Step-Ahead adaptive control technique, employed in this study, linearly estimates the dynamical behavior of the controlled system (Goodwin and Sin, 1986). This adaptive controller offers several attractive features over classical PID controllers, such as promptness, reliability and adaptive disturbances rejection, as can be found in Dambrosio et al. (2003), where a comparison the One-Step-Ahead adaptive controller and PID one has been carried out. In particular, the two features which play a key role for the One-Step-Ahead adaptive capability are represented by the model estimation accuracy and the model estimation convergence rate to controlled system. Nevertheless, as the iterations proceed, its adaptive capability reduces very quickly. Such a negative outcome is usually settled by resetting the covariance matrix (main responsible of the estimation convergence rate) to the initial values. Such a procedure is quite abrupt: it cancels the estimation knowledge stored in the covariance matrix, and it can possibly generate local instabilities.
The present paper proposes an enhancement in the model parameter estimation in order to keep a fairly good level of adaptivity. In the Results section a comparison between the performances obtained by means of the One-Step-Ahead controller featured with an ordinary parameter estimator, reported in Dambrosio (2018), and those produced by the same controller scheme but equipped with the proposed parameter estimator will be presented. The case study considers a wind system power generation which supplies an isolate electrical load disconnected from the power supply grid (Figure 1). It is composed of a three bladed horizontal-axis wind turbine which drives a synchronous generator by means of gearbox: the controlled variables are represented by the output voltage and frequency whereas the control ones are the wind turbine blade pitch and voltage of synchronous generator rotor winding. The parameter estimator proposed in this paper, unlike the ordinary ones, does not update the model parameters with a constant rate, but it considers a variable gain which allows to modulate the estimated model parameters updates according to the dynamic system condition. As it will be described in the following, such a gain will be determined by means of a fuzzy logic mapping system.
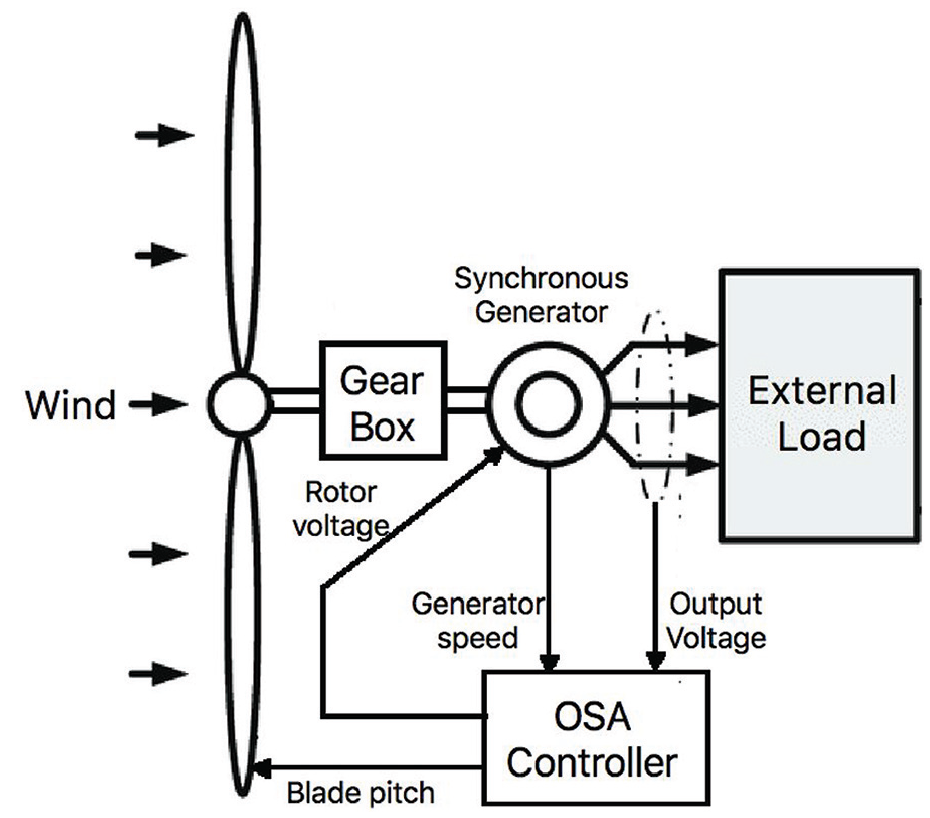
Wind system power generation scheme.
Mathematical model of the horizontal axis wind turbine
The mathematical model of the horizontal axis wind turbine here considered relies on momentum conservation in both the axial and tangential directions by using Blade Element Momentum approach (Hansen, 2015; Tahani et al., 2014). For instance, the airfoil aerodynamic polars i.e. the lift (


where


being

In the present paper, a three-bladed horizontal-axis wind-turbine,
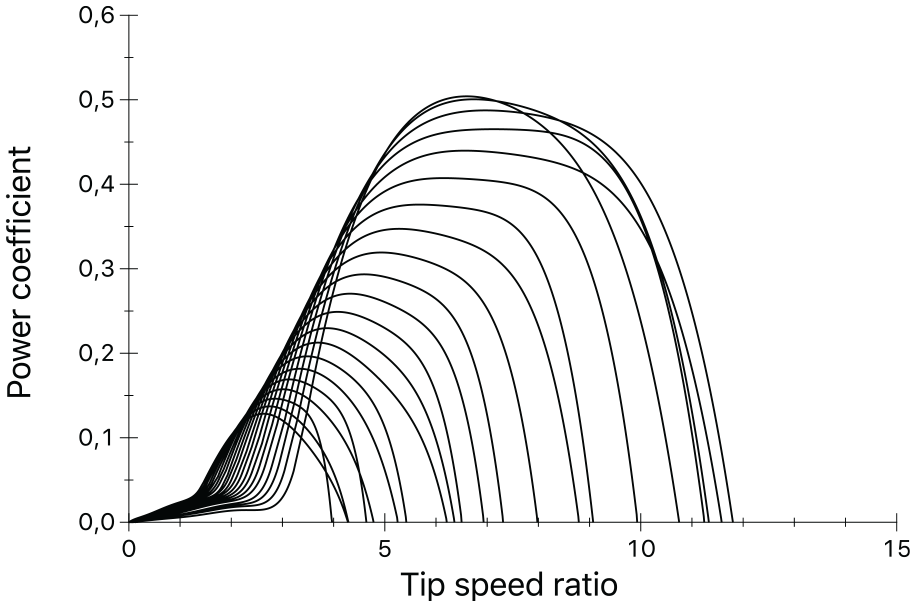
Wind turbine power coefficient.
Mathematical model of the synchronous generator
The wind turbine drives a three phase synchronous generator. Considering a balanced generator windings together with balanced external load, the governing equations (Umans, 2014) in a fixed axis reference system,

where
Considering the equilibrium of stator equivalent circuit, being the external load an ohmic-inductive impedance, with an inductance,

where

where

One-step-ahead adaptive control technique
The One-Step-Ahead (OSA) algorithm employes the Least Squares Algorithm (LSA) as parameter estimator; as illustrated in the scheme reported in Figure 3, relying on an appropriate time sequence of input and output data, it estimates, at each sample time, the parameters of an Auto-Regressive Moving Average (ARMA) model in state-space form, which approximates the controlled system (Brockwell and Davis, 2016; Goodwin and Sin, 1986; Paolella, 2018). From the estimated ARMA model, the control law can be designed in order to drive to zero the estimated control tracking error. The general n-order ARMA scheme that models a generic non-linear system, in predictor form with d-step ahead, can be written as:
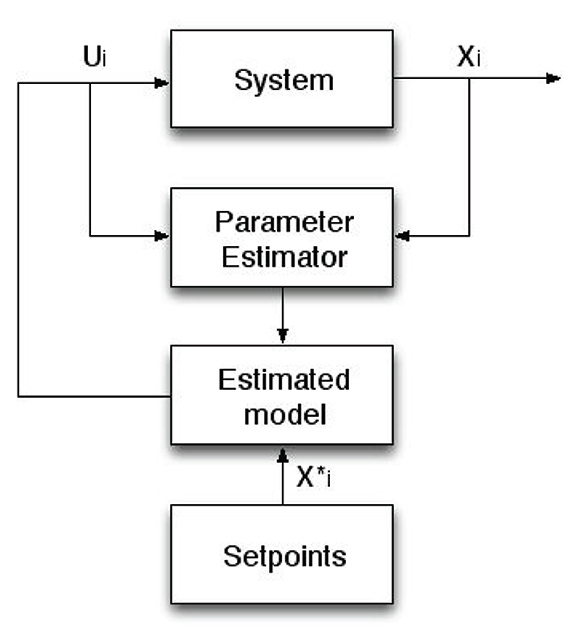
One-Step-Ahead algorithm scheme.

where

where

where:

In equation (12),

In equation (14),

in order to estimate the value of the control tracking error, which reads:

where

Setting control tracking error

Equation (18) provides the control laws, which aim to converge to zero the control tracking error

where the value of
Like for any other parameter estimator, the most relevant features for the LSA are represented by the parameter estimation accuracy and the model estimation convergence rate to the controlled system. The first one deals with the estimation error or, in other words, it measures how close (or how far) the estimated model output is to (from) the system output. On the other hand, the model estimation convergence rate, which is the first time derivative of the estimation error, denotes the estimator ability to keep track of the system variations (non linearities and/or time variances). Although these two features are not independent, since they refer to two different estimator skills, they might not be necessarily required at same time. In fact, when system experiences a significant transient period (e.g. system starting up, disturbance effects) from an estimation effectiveness point of view, the parameter estimator algorithm should present high estimation convergence rate and only fair estimation accuracy. On the contrary, when the system settles in the neighborhood of the equilibrium condition (e.g. system steady state and/or after disturbance effects have been sufficiently damped) the estimation accuracy plays a key role, whereas the estimation convergence rate has only a minor relevance. The ordinary LSA, as described by equation (14), is characterized by a very high initial convergence rate and a poor estimation accuracy. As the iterations proceed, the first rapidly decreases, since the
In the present paper a different approach is proposed for the LSA estimator algorithm: as shown in Figure 4, in order to avoid the

One-Step-Ahead algorithm proposed scheme.

where


Moreover, the OSA controller, featured by the ordinary LSA (equation (14)), provides the control law
Finally, since the proposed LSA parameter estimator does not consider any resetting strategy, the constant
Results
The wind power plant configuration considered in the present paper is composed of a three bladed horizontal axis wind turbine with variable blade pitch connected to a three-phase synchronous generator by means of a gear box, as shown in Figure 1. Such a wind power plant supplies an isolate electrical load disconnected from the power supply grid. For this reason, the output voltage and frequency (controlled variables) must track some prescribed values; this is achieved by acting on the manipulating variables which are represented by the wind turbine blade pitch and voltage of synchronous generator rotor winding. The wind system starts from rest and, after a starting time interval, it reaches a steady state condition. During the steady state time interval, an appropriate disturbance pattern has been hypothesized, which perturbs the system status. Such disturbances are represented by the instantaneous changes of the wind speed (
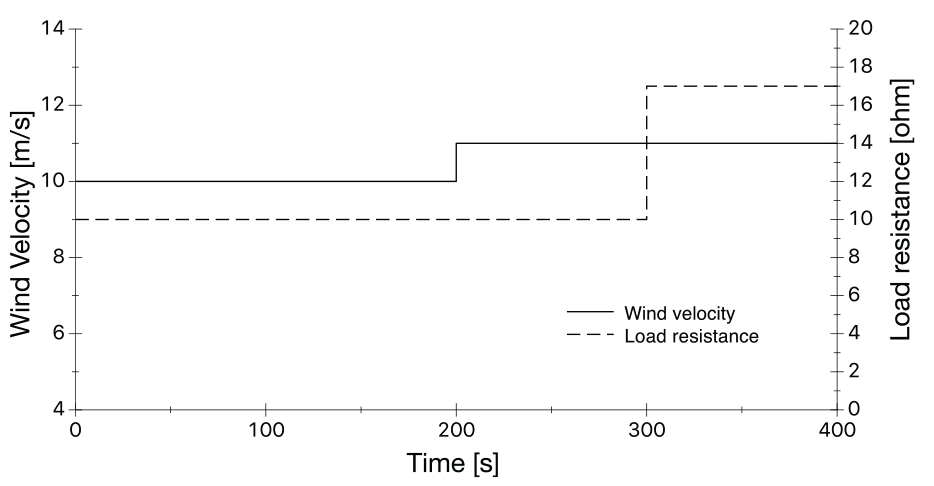
Disturbances time variation.
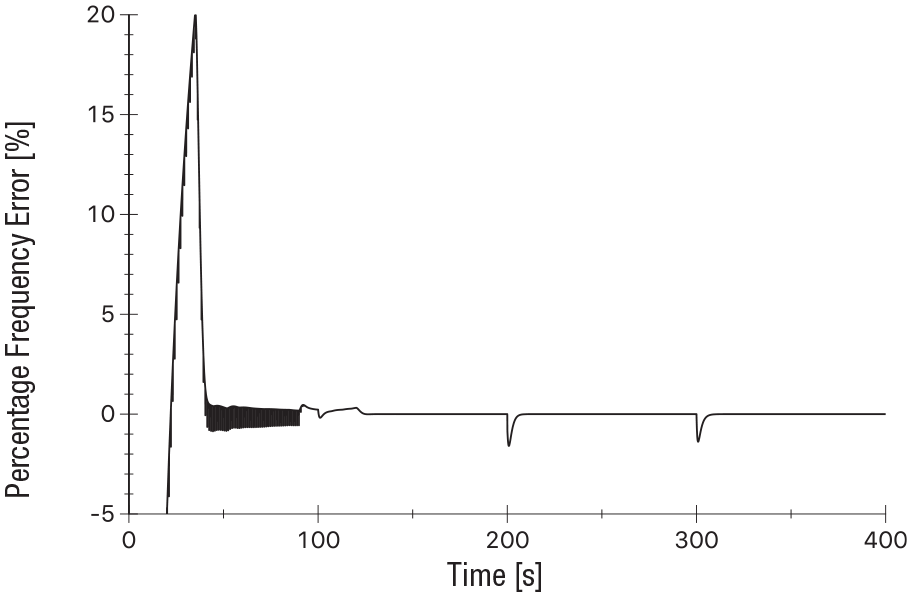
Figure 6 shows the time history of the output frequency,

Output frequency (controlled variable).

Percentage error of the output frequency.
Figure 8 presents the output voltage,

Output voltage (controlled variable).
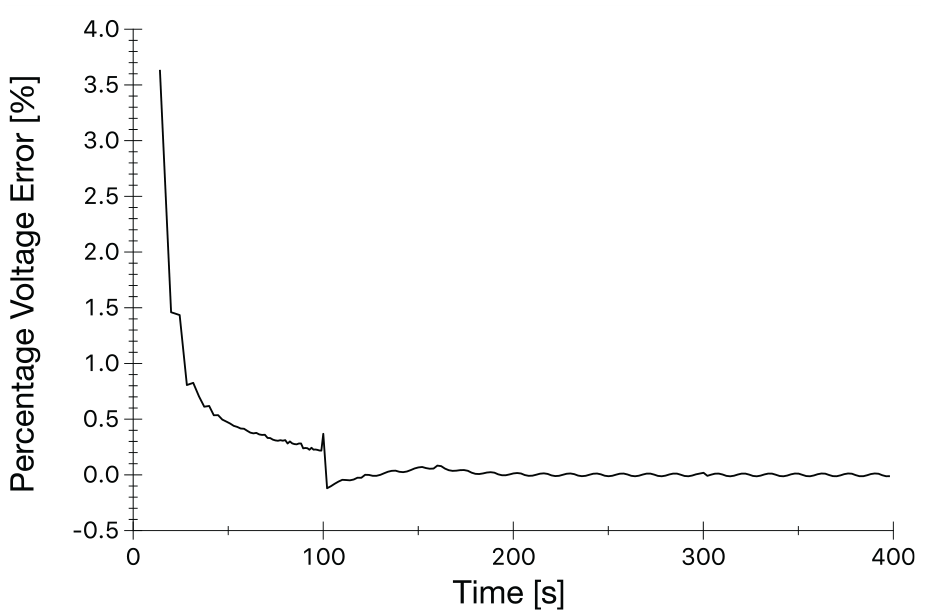
Percentage error of the output voltage.
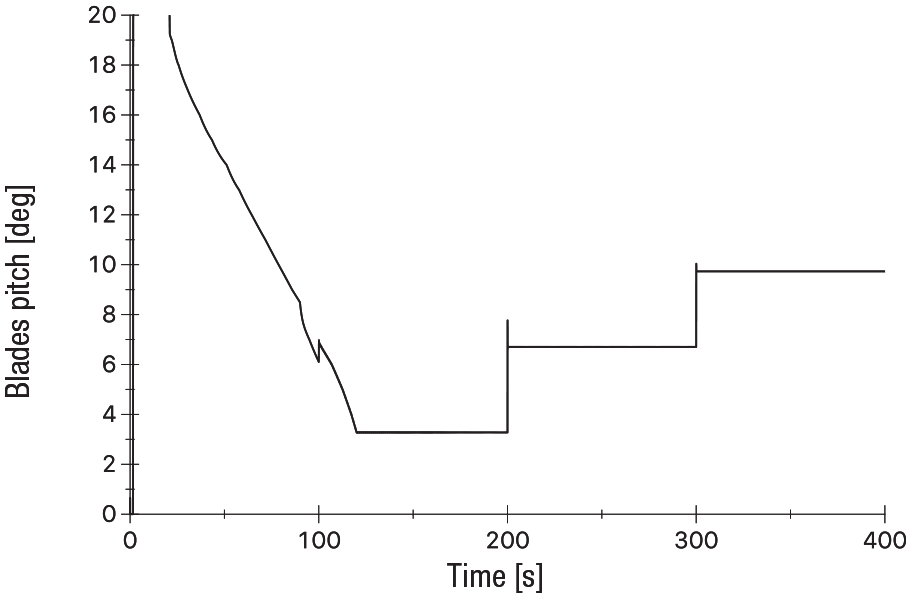
Blades pitch (control variable).
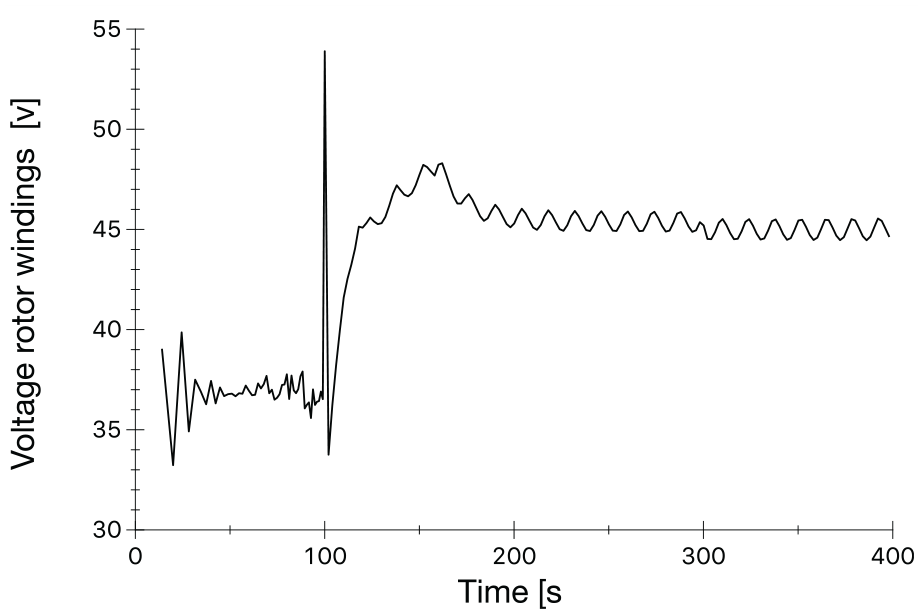
Voltage of the rotor windings (control variable).
Finally Figure 12 shows the time variations of the gains which enable the
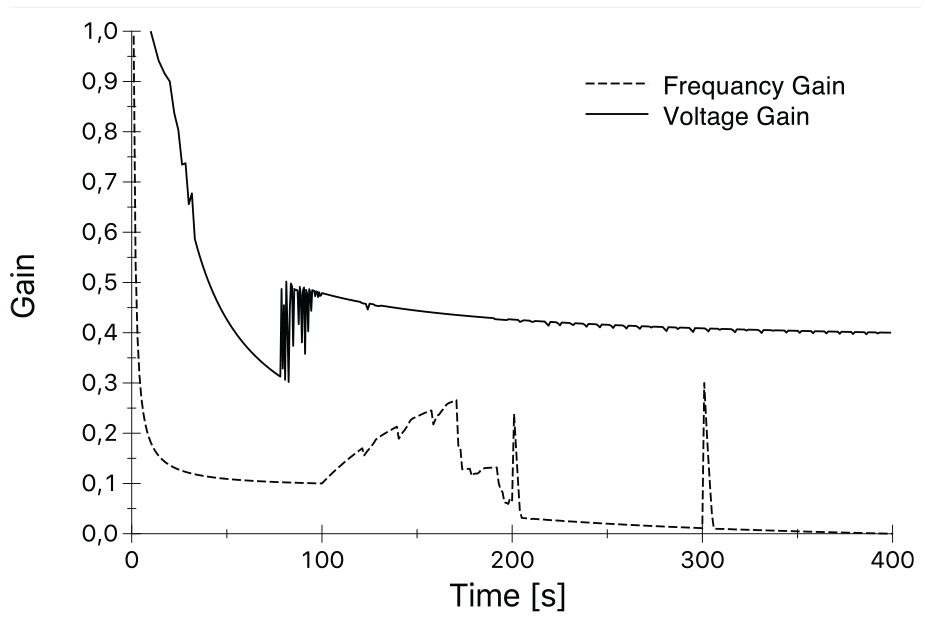
Gains for the
At the end, some results coming from Dambrosio (2018) where the OSA algorithm is applied by using a smart resetting procedure of the LSA covariance matrix will be presented for comparison. For the sake of conciseness, only the results regarding the output frequency and voltage percentage errors of the synchronous generator will be shown (Figures 13 and 14), respectively. From a quick glance, comparing these figures with the corresponding ones obtained by using the proposed LSA algorithm (Figures 7 and 9), one can note that they provide similar performance. Nevertheless, during the staring period, by using OSA controller featured by the proposed LSA, both the controlled variables reach the neighborhood of the zero-control tracking error condition earlier with respect to those obtained in Dambrosio (2018). On the other hand, during the steady state condition, the frequency percentage error from Dambrosio (2018) reports two evident spikes due the disturbances step variations; on the contrary, no significant impact seems to affect the frequency percentage error presented in this paper. Such aspect is important, as it is the evidence of the robustness and accuracy of the OSA controller equipped with the proposed LSA parameter estimator.
Percentage error of the output frequency from Dambrosio (2018).

Percentage error of the output voltage from Dambrosio (2018).
Conclusions
In the present paper, an enhanced version of the One Step Ahead control algorithm has been proposed to regulate a wind system designed as an isolated electrical power generation station. The wind system is composed of a horizontal-axis three bladed wind turbine connected to an electrical synchronous generator through a gear box. The wind system has been numerically simulated and the mathematical models of its components have been presented. The proposed enhancement of the One Step Ahead controller considers an appropriate modulation of the LSA covariance matrix, instead of its resetting to a starting value. Such change permits, on one hand, to improve the estimation accuracy and the model convergence rate only when genuinely necessary; on the other hand, it reduces drastically the number of problem-dependent parameters necessary to define the One Step Ahead controller. Finally, achieving a good estimation accuracy, no integral correction to the control law is needed.
The results of the application of the enhanced controller algorithm to regulate a wind system designed as an isolated electrical power generation station have been presented. Comparing such results with those obtained by means of the same control scheme but featured by a LSA with covariance matrix resetting procedure, it appears quite evident that the proposed parameter estimator enhancement achieves a faster and more accurate estimation which, in turns, translates into smaller control tracking errors and disturbances rejections. Moreover, such One Step Ahead scheme effectively eliminates all the local instabilities due to the former resetting procedures. All these considerations have proven the immediate application of the proposed procedure and its robustness.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.