
Abstract
With increased wind power penetration in modern power systems, wind plants are required to provide frequency support similar to conventional plants. However, for the existing frequency regulation scheme of wind turbines, the control gains in the auxiliary frequency controller are difficult to set because of the compromise of the frequency regulation performance and the stable operation of wind turbines, especially when the wind speed remains variable. This paper proposes a novel frequency regulation scheme (FRS) for de-loaded wind turbines. Instead of an auxiliary frequency controller, frequency support is provided by modifying the parametrized power versus rotor speed (Pw-ω r ) curve, including the inertia power versus rotor speed curve and the droop power versus rotor speed curve. The advantage of the proposed scheme is that it does not contain any control gains and generally adapts to different wind speeds. Further, the proposed scheme can work for the whole section of wind speed without wind speed measurement information. The compared simulation results demonstrate the scheme improves the system frequency response while ensuring the stable operation of doubly-fed induction generators (DFIGs)-based variable-speed wind turbines (VSWTs) under various wind conditions. Furthermore, the scheme prevents rotor speed overdeceleration even when the wind speed decreases during frequency regulation control.
Keywords
Introduction
Wind power generation is the most popular renewable generation technology, and the technology of wind turbine is still improving (Singh and Sundaram, 2020; Singh et al., 2019b, 2021), such as the improvement of wind turbine cooling system (Singh and Sundaram, 2021; Singh et al., 2018, 2019c), fault analysis (Singh et al., 2019a, 2019d), and so on. In 2020, the new installation of wind power generation was 93 GW, and the total installed capacity was 743 GW (Global Wind Energy Outlook, 2020). Approximately 95% of installed wind turbines (WTs) are Variable speed wind turbines (VSWTs), either DFIGs-based with partially rated converters or PMSGs-based with fully rated converters (Babu and Ramesh, 2013; Liserre et al., 2011). Unlike conventional power generators, VSWTs have no inherent inertial response because of the power electrical converter interface. VSWTs usually do not participate in the system frequency response for operation in maximum power point tracking (MPPT) mode. Therefore, as the penetration of VSWTs increases, the inertial and frequency regulation ability of the whole power system will degrade, causing frequency stability issues (Liu et al., 2017; Margaris et al., 2012). Some countries have required wind plants to provide frequency support (Aho et al., 2012; Hydro Québec, 2009; Nordic Grid Code, 2007).
Many research studies have discussed the frequency regulation scheme (FRS) for VSWTs. The strategies can be classified into inertial response control and de-loaded control (Wu et al., 2018, 2019).
For inertial response control, the VSWTs still operate in MPPT mode, and the rotational kinetic energy (KE) of VSWTs is released to deliver temporary addition power during frequency dips. Further, the inertial response control can divide in two subcategories (Wu et al., 2019): natural inertial control (Kayikçi and Milanovic, 2009; Lee et al., 2016; Min et al., 2016; Morren et al., 2006; Wu et al., 2019; Zhao et al., 2015, 2020) and stepwise control (Hafiz and Abdennour, 2015; Kang et al., 2016; Ullah et al., 2008).
For natural inertial control, the value of the addition power is determined by the frequency measurement, such as the rate of change of frequency (ROCOF) (Kayikçi and Milanovic, 2009), or the frequency deviation (Lee et al., 2016; Morren et al., 2006), or both of them (Lee et al., 2016; Min et al., 2016; Wu et al., 2019; Zhao et al., 2015, 2020). Considering that the wind speed is variable and the change of the rotor speed is complicated, the auxiliary frequency controller’s gains should be selected carefully with the trade-off considering the frequency regulation performance and the stable operating range of the wind turbine. Therefore, some varying gain methods have been suggested. In Zhao et al. (2015), the control gains of FRS under different wind speeds is adjusted based on the wind speed. However, the pre-determined gains are obtained by the off-line modeling analysis, and the wind speed measurement may not be obtained or inaccuracy. To improve the frequency nadir (FN) and ensure stable operation of DFIG, the droop gains is dynamically changes based on ROCOF in Min et al. (2016). In Lee et al. (2016), the gains of additional ROCOF and frequency deviation loops is adaptively tuned depended on the rotor speed measurement. Wu et al. (2019) present a time varying gains determined based on desired frequency-response time to raise frequency nadir and eliminate frequency second dip. Zhao et al. (2020) proposed an adaptive droop gain which is a function of real-time rotor speed and wind power penetration level.
For step-wise control, the addition frequency power is determined by the pre-set power surge function, such as step function (Ullah et al., 2008), ramp function (Hafiz and Abdennour, 2015), or torque limit function (Kang et al., 2016). Compared with natural inertial response, the inertial power using the step-wise control can be properly tuned according to different shapes in terms of its magnitude and duration. An optimization approaches employing the genetic algorithm are proposed to maximize the released energy from the wind turbine during its overproduction period (Altin et al., 2018). However, during the rotor speed recovery period, the output power of wind turbine reduced and may cause a secondary frequency drop (Yang et al., 2018a, 2018b). In Yang et al. (2018a, 2018b), the incremental power varies with the rotor speed and wind power penetration levels during the overproduction period, and then, the reference power smoothly decreases with time and rotor speed during recovery period.
For inertial response control, because of the limit of the rotor kinetic energy, it only affords for seconds-term frequency support. While, for the de-loaded control, VSWTs reserve a part of the active power through pitch angle control (Margaris et al., 2012; Wu et al., 2018), over-speed control (Chang-Chien et al., 2011), or combination of both (Luo et al., 2019; Tang et al., 2019; Zertek et al., 2012). It can provide a minutes-term primary frequency support.
Due to rotor speed limit, the over-speed de-loaded control is only adapted for low wind range. In Zhang et al. (2012) and Li et al. (2019), three wind speed modes are defined: low wind speed mode where de-loaded operation is merely by rotor speed control; medium wind speed mode where de-loaded operation is conducted by combining pitch angle control and rotor speed control; and high wind speed mode where modified pitch angle control alone. However, it required accuracy wind speed information to judge the wind speed mode, and the calculation of de-loaded power reference need both parameters of wind turbine and wind speed. Liu et al. (2019) present a variable droop control strategy that considers optional rotor kinetic energy. However, the rotor kinetic energy estimation required the wind speed information and parameters of wind turbine. Wang and Tomsovic (2018) proposed a comprehensive frequency control that combines the temporary power injection control and power reserve control with consider rotor security and maximum extricable energy of wind turbines. But, it still required the parameter of wind turbines. In Gao et al. (2019) a comprehensive frequency regulation that combines the step-wise inertial control and variable-droop control is present.
Actually, in most of the literatures mentioned above, the additional frequency regulation power is determined by an auxiliary ROCOF and frequency deviation loops, which is added to the de-loaded power reference. The gains of the auxiliary frequency controller are difficult to set a proper value compromising of the frequency regulation performance and wind turbines rotor security. Moreover, if these schemes are applied to multiple WTGs, difficulties will arise in determining the different gains for all WTGs. Nevertheless, some adaptive gains methods in Lee et al. (2016), Liu et al. (2019), Min et al. (2016), Wang and Tomsovic (2018), Wu et al. (2019), Zhao et al. (2015, 2020), the proper initial value or parameters are also difficult to select (Lee et al., 2016; Min et al., 2016; Wu et al., 2019; Zhao et al., 2015, 2020), or the gains are determined by evaluating available energy which of the accurate parameters of wind turbines and wind speed information are required (Liu et al., 2019; Wang and Tomsovic, 2018).
This paper proposes a novel frequency support scheme for DFIG-based wind turbines. Instead of the auxiliary frequency controller in the most existing scheme, the additional frequency regulation power for wind turbines is determined by the modified parametrized power versus rotor speed curve. There are three main advantages of the proposed control scheme:
There are no control gains in the scheme. Thus, it does not need to carefully select a proper control gains for wind turbines like the existing scheme. It can generally adapt for multiple WTGs with different wind speeds.
It has potential self-adaptive frequency support with wind speed and can continuously ensure that the wind turbine operates within the safe rotor speed range, even in the case of a sudden decrease in wind speed.
It can work for the whole wind speed range and does not need wind speed information.
The remainder of this paper is organized as follows: In Section 2, the DFIG-based wind turbine model and the traditional frequency regulation scheme are introduced. In Section 3, the proposed frequency regulation scheme for DFIG-based wind turbines is presented. In Section 4, compared with the traditional frequency regulation, the proposed control scheme’s performance is demonstrated under various wind conditions. Finally, a brief conclusion is drawn in Section 5.
DFIG model of a DFIG-based wind generation
Figure 1 shows the block diagram of DFIG-based wind turbines’ simplified model, commonly used for frequency control studies and developed in Ochoa and Martinez (2017). The mechanical power of a DFIG captured from the wind, Pm, is defined by (Sun et al., 2019)

where ρ—air density, R—radius, Vw—wind speed, λ—tip speed ratio, λ = ωrR/Vw, ω r —rotor speed, β—pitch angle, and Cp(λ, β)—power coefficient.
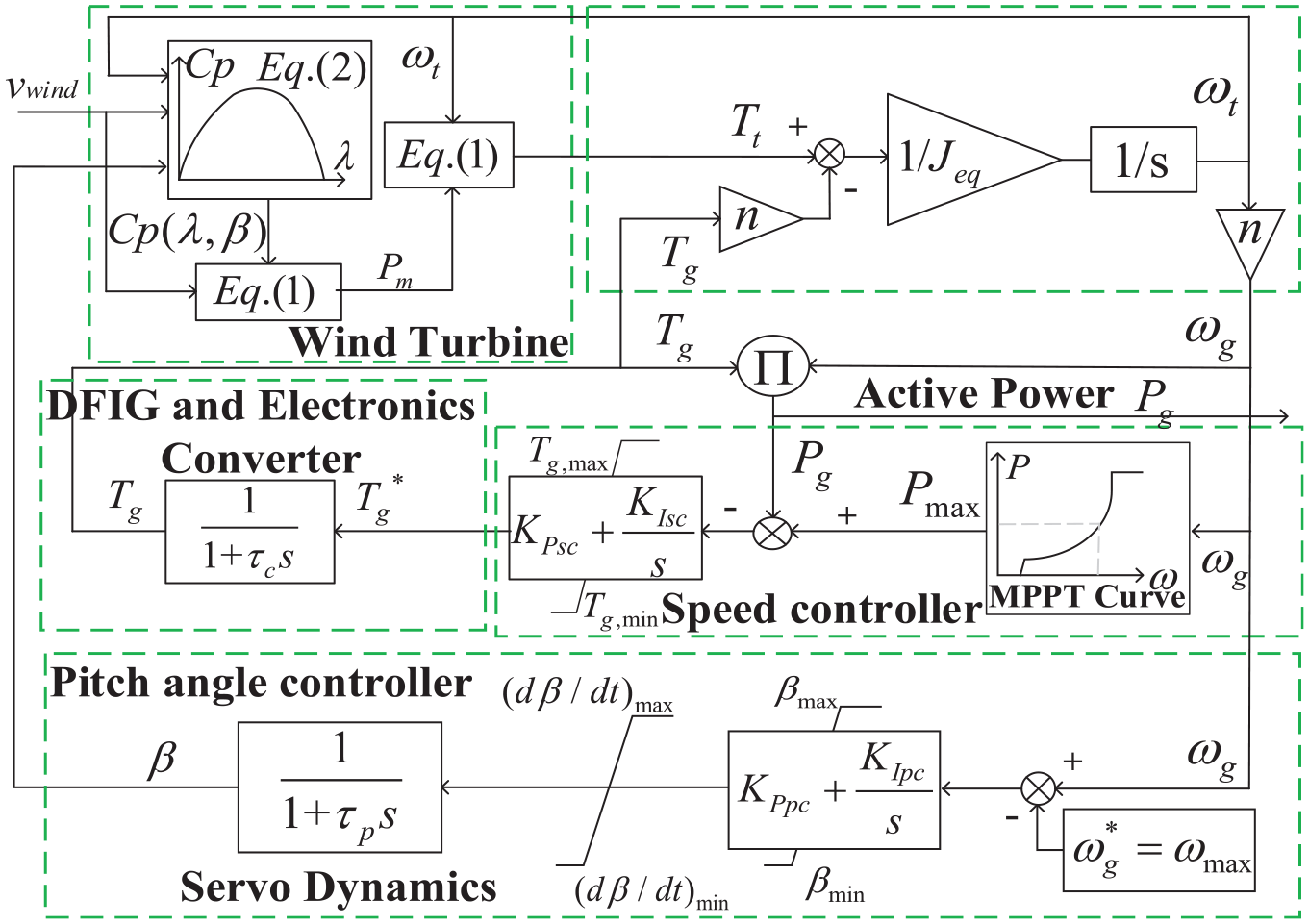
Block diagram of a simplified model of a DFIG-based wind turbine.
As in Ekanayake and Jenkins (2004), Cp(λ, β) can be expressed as:

A “one mass” system has been considered to represent the rotational dynamics of the gearbox, wind turbine and electrical generator (Clark et al., 2010; Li et al., 2019), whose equivalent moment of inertia is Jeq. where T, P, and ω represent torque, power, and angular speed, respectively; subscripts g and t are used to indicate the variables referring to the generator and the turbine. fs, p, and n are the grid frequency, the number of pole pairs, and the gear ratio of the DFIG, respectively.
In addition, the DFIG and the rotor side converter (RSC) are both regarded as a single first-order dynamics actuator, with a time constant τC, whose input is the electromagnetic reference torque from the speed control system Tg*.
Maximum power point tracking controller (MPPT)
To capture the maximum wind power by the wind turbine, a power reference, Pmax is from the maximum power versus rotor speed (Pmax-ω r ) curve that can be represented by (3) and illustrated in Figure 2 (the solid black line).

where kopt is the optimization constant, whose value depends on the physical characteristics of the wind turbine.
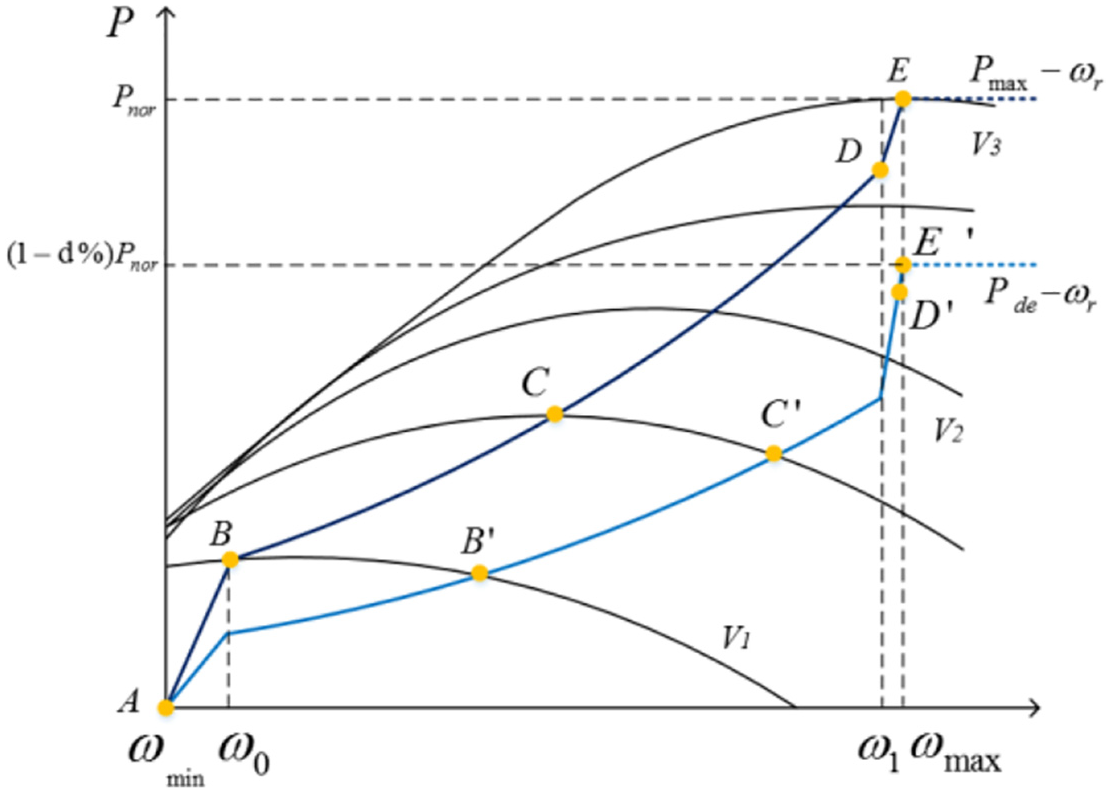
Maximum power curve and de-loaded power curve for DFIG-based VSWTs.
Concerning Figure 2, the maximum power curve is divided into four segments according to the rotor speed. The segment A–B corresponds to the starting zone. In segment B–D, known as the optimization zone, the rotor speed is adjusted to the optimal speed with the optimal power coefficient Cp(λ, β). Segments D–E are constant rotor speed zones, and the rotor is almost invariable. After the segment after point E is called the constant power zone, Pmax is constant Pnor.
The intersection point of the capture power versus rotor speed curve (Pm-ω r ) and the maximum power curve (Pmax-ω r ) is an equilibrium point. After some disturbances, the DFIG-WT automatically converges to the intersection point, where the captured mechanical power Pm is equal to the optimum power Popt, and the rotor equals ωopt.
A pitch-angle controller is used to prevent the rotor speed from exceeding ωmax and keep the output power at the rated value when wind speeds are high.
The traditional FRS for DFIG-based WT
The most popular FRS for wind turbines is shown in Figure 3, as in Lee et al. (2016) (and similar schemes in Lee et al. (2016), Luo et al. (2019), Min et al. (2016), Tang et al. (2019), Wu et al. (2019), Zertek et al. (2012), Zhao et al. (2015, 2020)). To realize de-loaded control, a de-loaded power versus rotor speed curve (Pde-ω r ) replaces the Pmax-ω r curve. This makes the rotor speed higher than the optimum rotor speed. The DFIG-WT operates at a suboptimal point below the maximum power point (reserve a part of the active power). A typical Pde-ω r curve is given in Figure 2 (the blue line).
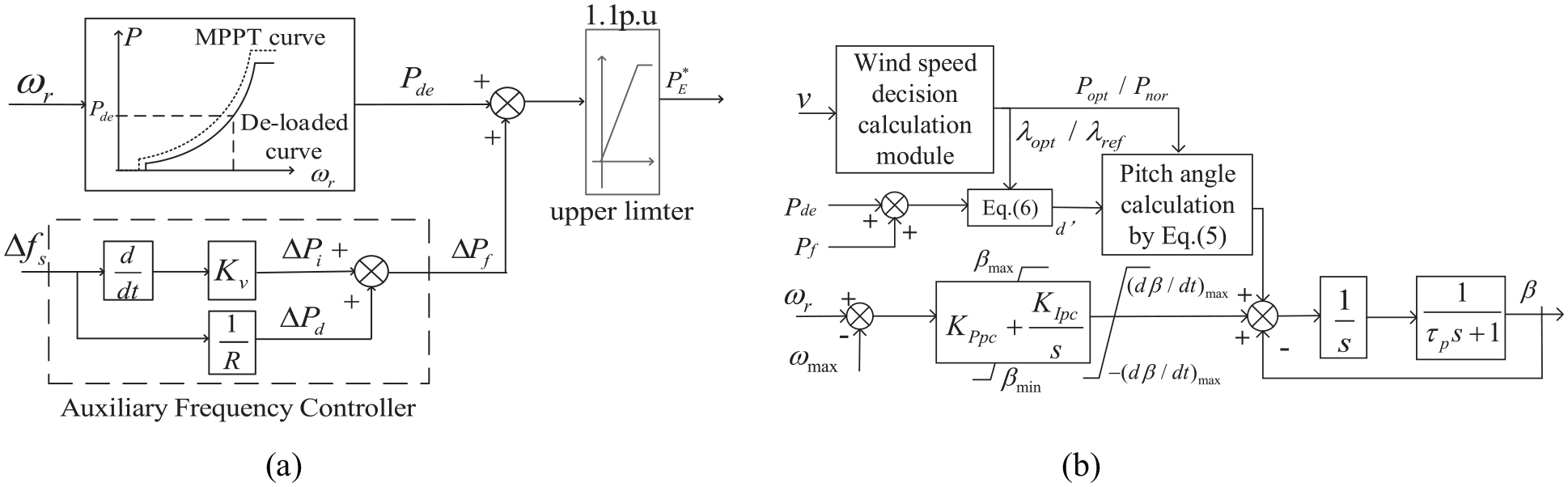
The commonly used frequency regulation controller for DFIG-based wind turbine: (a) auxiliary frequency controller (b) pitch angle controller.
An auxiliary frequency controller (AFC) is added to generate an additional power ΔPf, as expressed in (4). It includes virtual inertia response and droop response. The inertia response is based on the ROCOF, while the droop response is based on the frequency deviation.

where Kv and 1/R are the gains of the virtual inertia and droop loops, respectively.
The pitch angle control not only prevents the rotor speed from exceeding ωmax but also helps to realize de-loaded operation at medium and high wind speeds area (Lee et al., 2016). According to wind speed, the de-loaded control can be divided into three areas in Li et al. (2019), as shown in Figure 2.
Low wind speed area: V1–V2, βde = 0, ω r < ωmax; only the speed control loop is used to realize de-loaded control.
Medium wind speed area: V2–V3, βde > 0, ω r < ωmax. Both the speed control loop and pitch controller are used to realize de-loaded control.
High wind area: higher than V3, βde > 0, ω r = ωmax, only the pitch controller is used to realize de-loaded control. βde is the de-loaded pitch reference for avoiding overspeed.
The control of the pitch angle is shown in Figure 3(b). βde is obtained from wind turbine modeling by solving equation (5).

where λopt is the optimum tip speed ratio and Cp,max is the maximum wind energy capture factor. λref is the reference tip speed ratio in over speed control, λref = ωmaxR/v, and Cp,rated is the wind energy capture coefficient when operating at rated power. β0 is the pitch angle reference when the wind turbines operate at the rated power. βde is the de-loaded pitch angle in the de-loaded control mode. d′% is the real de-loaded ratio of the wind turbine and can be calculated as:

where Popt is the reference power of the wind turbine under MPPT and Pnor is the rated power.
However, there are still some shortcomings for the traditional frequency regulation scheme.
The gains of AFC are challenging to set because of the compromise of the frequency support performance and wind turbines’ stable operation. A large gain can improve the frequency regulation while causing overdeceleration of a DFIG. Conversely, a small gain can prevent overdeceleration, but it provides a limited contribution to frequency supports. In addition, for multiple WTGs, the available energy is different because the available energy is determined by the wind turbine characteristics and wind speed. There cannot be a single proper value for all different DFIGs.
Wind speed information is required to realize de-loaded and frequency support control for the whole section of wind speed. As seen in Figure 3(b), wind speed information V is necessary for the decision of the wind speed area, calculating the maximum power Popt and the optimum tip speed ratio λopt.
The proposed frequency regulation scheme
To address the limitations mentioned above, a novel frequency regulation scheme for de-loaded wind turbines is proposed. The whole control diagram of the proposed scheme is illustrated in Figure 4.

The proposed frequency regulation scheme.
The proposed FRS includes two key steps. First, the de-loaded curve is modified into a droop power curve based on the frequency deviation to provide a droop frequency response. Second, the droop power curve is further modified into an inertia power curve based on ROCOF to provide both inertia and droop frequency responses. The detection of dfs/dt is sensitive to noise and harmonic disturbance. Hence, a washout filter (Tw = 0.01) (Wang et al., 2019) is used to obtain dfs/dt, as seen in Figure 4.
Then, the power reference PE* can be obtained based on the measurement of the rotor speed ω r .
The de-loaded power curve, the droop power curve and the inertia power curve are detailed below.
De-loaded power curve
The fixed power reserve d%, is defined as

where Popt is the maximum available power, Pde is the de-loaded power, and d% is set to 10% in the paper.
Similar to the Pmax-ω r curve, the de-loaded curve Pde-ω r curve can be similarly expressed:

where kde is the de-loaded constant and Pde is the de-loaded power.
Noticed that kde does not equal the 0.9 kopt. As shown in Figure 4, for the same wind speed, the rotor speed with 0.9 Popt is larger than the optimum rotor speed. By off-line data fitting, it can be obtained that the value of kde with a 10% power reserved ratio is 0.2172. At the maximum rotor speed for the de-loaded power curve, the corresponding wind speed is 10 m/s, instead of 12 m/s for the maximum power curve.
Droop power versus rotor curve
The droop power curve, Pdroop-ω r , is shifted from the de-loaded curve (Pde-ω r ) to the maximum power curve (Pmax-ω r ) based on the frequency deviation.
d% is 10% in this paper, and the droop curve Pdroop-ω r is defined as follows:

where ksopt is defined as,

Where kde80% is the de-loaded constant with an 80% power reserve for the wind turbine, which to provide 10% power regulation capability for frequency rise event. kde80% is obtains by off-line data fitting and kde80% = 0.1956. Δfmax is the allowable frequency deviation and Δfmax = 0.5 Hz in this paper.
The droop power curve is illustrated in Figure 5.
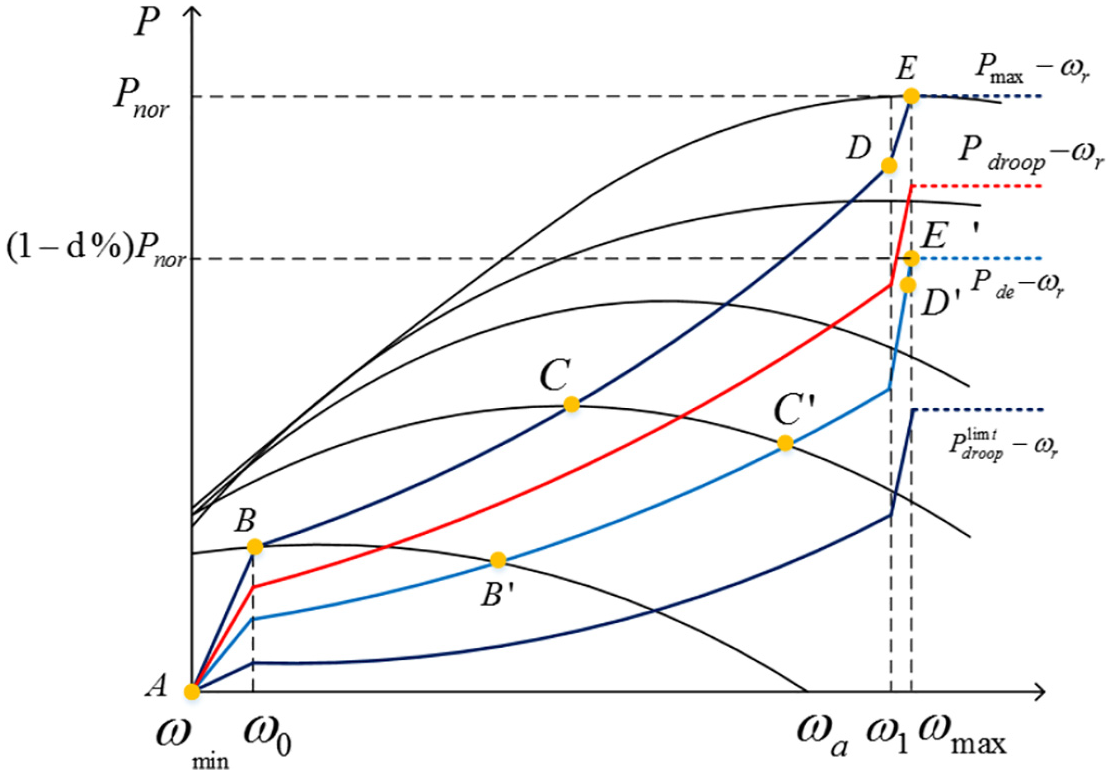
The droop power curve.
When the frequency dips, the droop curve moves toward the Pmax-ω r curve. Thus, the reference power with the same rotor speed is larger, that is, more active power from the wind turbine is delivered to the system.
The droop response is a minute-term time response. Thus, the Pmax-ω r curve is the upper limit of the droop power curve. The additional power from the Pdroop-ωr curve does not exceed the maximum available power.
When Δfs = 0, Pdroop-ω r is the same as the de-loaded power curve. Otherwise, when the frequency rises, the power curve moves down, and the reference power with the same rotor speed changes to a smaller value. Pdrooplimit-ωr is the lower limit droop curve (as seen in Figure 5) and is near 80% of the maximum power curve.
Therefore, the droop power curve provides droop frequency support for the wind turbine, similar to the droop response in the traditional auxiliary frequency controller.
Note that there is always an intersection of the droop power curve and the captured wind power curve (equilibrium point). This means that the DFIG always converges to the equilibrium point in any case. Furthermore, the droop power curve definition does not contain any control gains in (9).
Inertia power curve
Furthermore, to provide inertia supports for the system frequency, the droop power curve, Pdroop-ω r , is further modified into an inertia power versus rotor speed curve, called Pin-ω r , based on the ROCOF (dfs/dt).
In this paper, the inertia power curve is defined in (11) as below.

where Pupinertial-ω r is the upper limit of the inertia power curve, and Plowerinertial-ω r is the lower limit of the inertia power curve. (dfs/dt)max is the maximum measurement dfs/dt during the frequency event process.
To obtain (dfs/dt)max, a latch is used to store the maximum value. This means that if a new measurement (dfs/dt) value is larger than the old storage value, the new value replaces the old storage value. Otherwise, the latch keeps the old storage value.
P up inertial-ω r is defined as in (12), which borrows from Wang and Tomsovic (2018). Pupinertial-ω r also shown in Figure 6.

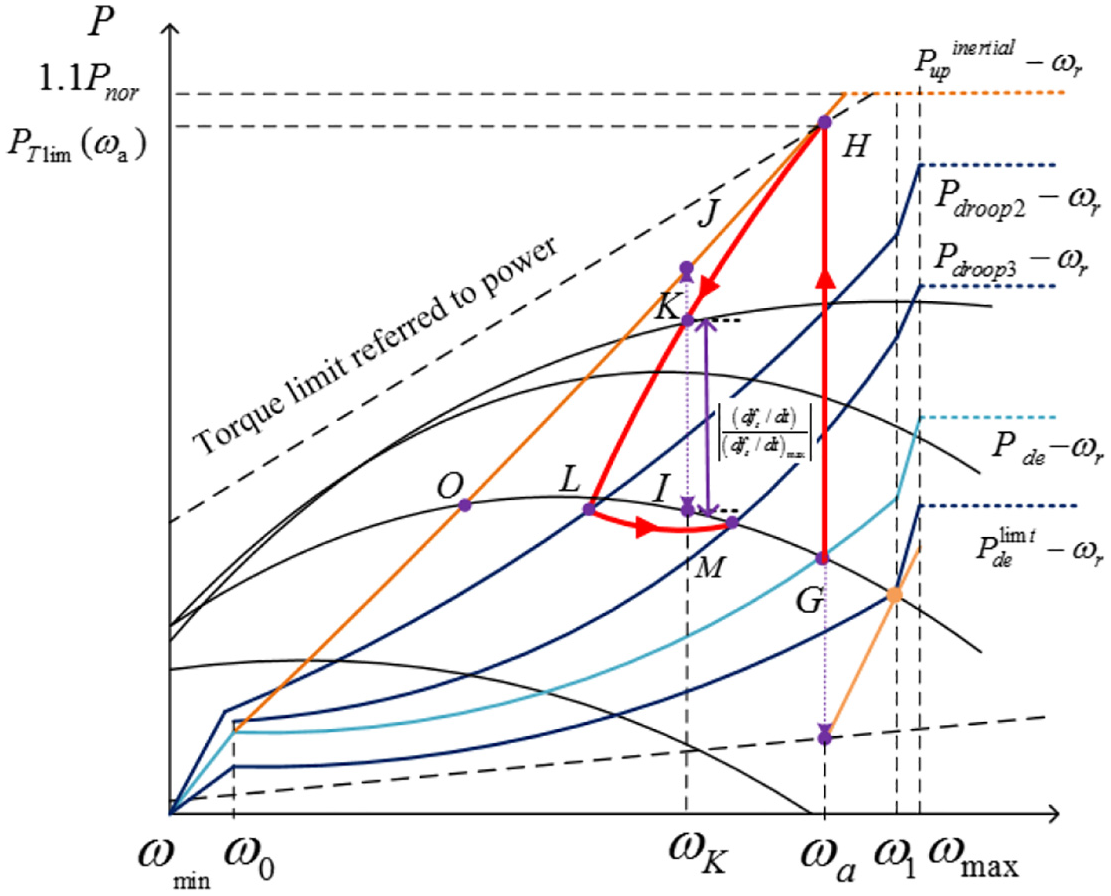
The inertia power curve.
PTlim is the torque limit relative to the power curve. ω a is the initial rotor speed.
To avoid the rapid and excessive increase in the output power causing the wind turbine’s mechanical torsion, the power limit Plimit and the maximum torque limit Tgmax are often set to 1.1 pu and 1.07 pu (Yang et al., 2018a) .
The minimum torque limit Tgmin are often set to 0.05 pu (Ochoa and Martinez, 2017). The rotor speed increases during the frequency increase event. Therefore, the definition of the Plowerinertial-ω r is only considered the range of the rotor speed higher than the current rotor ω a . Similarly, the definition of Plowerinertial-ω r is required to prevent the speed rotor over-accelerating. The Pupinertial-ω r is given in (13), and as the red curve shown in Figure 6.

To explain the frequency regulation proceeding, a frequency drop event is taken as an example, and the trajectory of operating point during the frequency regulation process is depicted by the red curve in Figure 6.
At the initial time, ‘G’ is assumed to be the initial operating point located at the de-loaded curve. Δfs and |dfs/dt| are negative values, and dfs/dt quickly drops to the minimum value. That is, |dfs/dt| reaches the maximum value. The de-loaded power curve quickly turns into the upper limit inertial curve, Pupinertial-ω r . Thus, the operating point switch from the ‘G’ to the point ‘H’. The wind turbine releases the maximum allowable power for the supported frequency.
Then, Δfs and |dfs/dt| decreases. According to (9), the droop power curve moves up with Δfs. Meanwhile, the rotor speed ω r decreases because of the extra active power releasing. ‘J’ is the corresponding point with ω K located at Pupinertial-ω r curve, while ‘I’ is the corresponding point with ω K located at Pdroop-ω r curve. Because of the decrease of the dfs/dt (dfs/dt < (dfs/dt)max), according to (11), the operating point moved from ‘H’ to ‘K’ (Pin(ω K ),ω K ). The additional active power from the wind turbine is gradually decreased. Along with dfs/dt approach to zero, the operating point moves from the Pupinertial-ω r curve to the droop power curve.
When dfs/dt = 0, the frequency reaches the lowest point. At this time, the inertia power curve turns into the droop power curve. The operating point ‘K’ will turn into ‘L’ located into the droop power curve Pdroop2-ω r .
Then, the frequency recovery starts. dfs/dt and Δfs are opposite in sign. Unfortunately, the inertia response is not beneficial for frequency recovery. Thus, when dfs/dt > 0 and Δfs < 0, the power curve maintains the droop power curve. The inertial power curve is only enabled when dfs < 0 and dfs/dt < 0. As the frequency recovery (Δfs increase), the Pdroop2-ω r curve will move downward to the Pdroop3-ω r curve. As illustrated in Figure 6, the operating point will move from ‘L’ to ‘M’.
The Pupinertial-ω r curve and the Pm-ω r curve always has an intersection (like ‘O’ point in Figure 6), which also is an equilibrium point. Only under the extreme situations that dfs/dt keeps the max value (dfs/dt)max, the wind turbine will converge to this intersection. The rotor speed of this intersection still higher the minimum rotor speed limit ωmin. Practically, the dfs/dt will gradually reduce during the frequency regulation process. Hence, the rotor speed always higher than ωmin during frequency regulation process. Otherwise, the proceeding of the frequency rise event is similar. The proposed method can ensure the wind turbine operate among the safe rotor range and prevents overdeceleration.
Noticeably, there are no control gains in (9)–(11). The output power is determined by the current measurement rotor speed and the modified power curve. Thus, unlike the existing scheme’s difficulty in choosing the proper control gains, the proposed scheme does not have any control gains.
Pitch angle control
As described in the traditional FRS control (Section II. B), in the medium and high wind areas, pitch angle control is necessary to add to limit the rotor speed and help de-load control. However, in traditional control, wind speed information is required to decide the wind speed area and calculate the value of the compensation pitch βde. However, the inaccurate wind speed measurement may be harmful to the control performance. Furthermore, a complex calculation is needed to calculate βde. In this paper, improved pitch angle control is designed.
Figure 7 shows the de-loaded power, maximum power pitch angle β m , de-loaded pitch angle βde, and difference angle (between the aforementioned two angles) Δβ versus wind speed. The maximum power pitch angle remains zero until the wind speed reaches V2. Then, the pitch angle gradually increases to reduce the capture of wind power.

Pitch angle and de-loaded power at various wind speeds.
The de-loaded pitch angle remains zero until the wind speed reaches V1. Then, the pitch angle increases to realize de-loaded control. During V1 and V2, which is called the medium wind speed area aforementioned, both pitch angle control and rotor speed control are used to realize de-loaded control. At wind speeds higher than V2, only the pitch angle is used to realize de-loaded control.
Observing Δβ in Figure 7, Δβ can be divided into three segments: a low wind speed area where the wind speed lowers V1, where it is zero; a medium wind speed area during V1 and V2, where it is a nonlinear curve; and a high wind speed area, higher than V2, where it has a constant value (nearly 1.6° in this paper).
Figure 8 shows the wind power coefficient Cp versus pitch angle under different tip speed ratios.

Wind power coefficient Cp versus pitch angle under different tip speed ratios.
In the vicinity of λopt (λopt = 10.5 in this paper), Cp seems not to be influenced by the different λ. Therefore, the pitch angle is an almost constant value when Cp is not a considerable reduction. This is the reason that in the high wind area, Δβ remains almost constant to realize a certain power reserve.
Linearly fitting the λopt curve to obtain the approximate linear relationship between Cp and pitch angle:

If the DFIG operates at a 10% power reserve, β will increase by approximately 1.6°.
Further observing Figure 7 in the low wind area, the Δβ is zero, where the de-loaded power is below 0.38 Pnor; in the medium wind speed area, where the de-loaded power is between 0.38Pnor and 0.9 Pnor, the Δβ varies with de-loaded power. At high wind speeds, where the de-loaded power remains at 0.9 Pnor, Δβ remains at a constant value of 1.6°.
The Δβ versus the de-loaded power curve is described in Figure 9 and the polynomial fitting function given in (15).

According to (15), Δβ can be obtained based on the de-loaded power Pde. Wind speed information is not required.
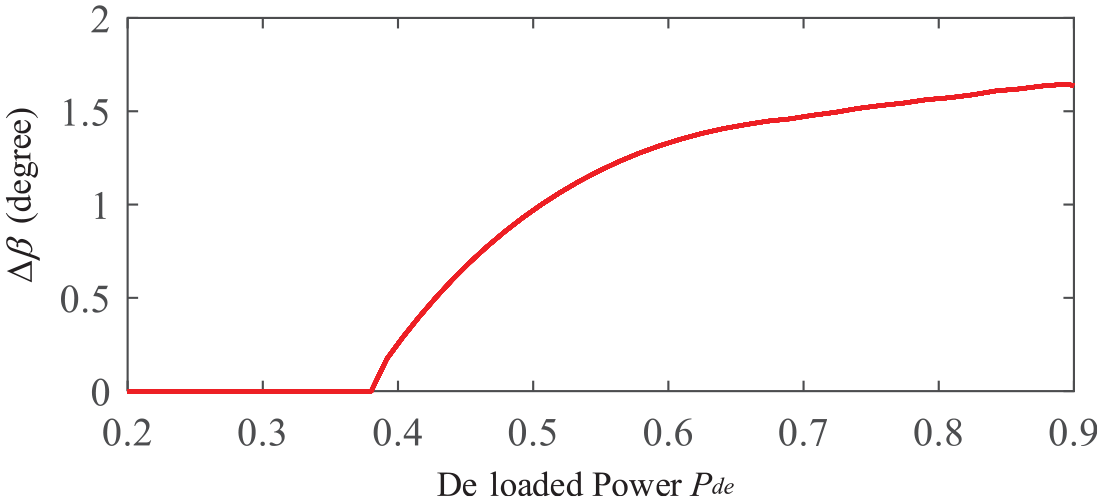
Δβ versus the de-loaded power curve.
In the medium and high wind speed areas, the pitch angle must be adjusted to release more or less active power for participation in frequency regulation. The improved pitch control diagram is given in Figure 10 below.
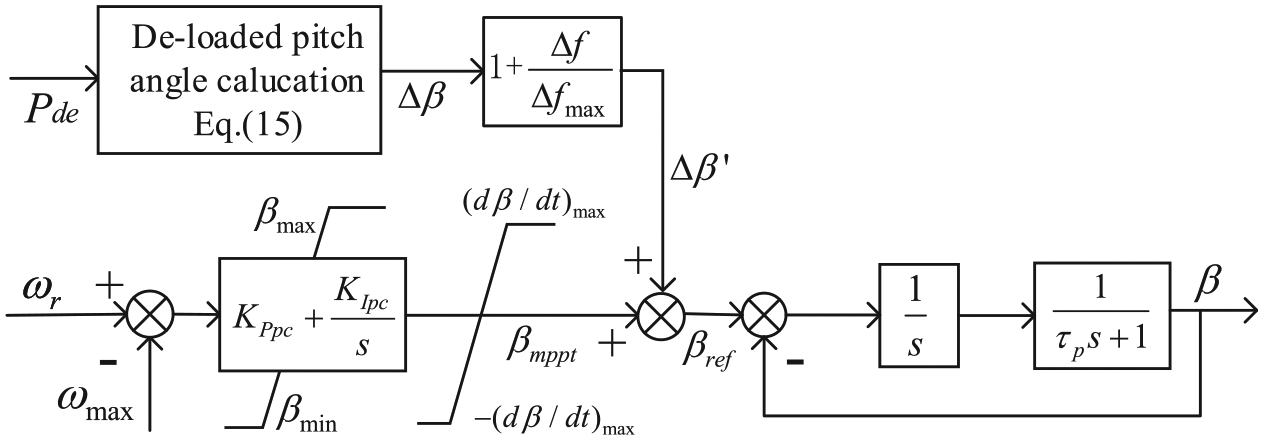
The proposed pitch angle control scheme.
As seen in Figure 10, Δβ is obtained from equation (15), and a simple linear method is used to calculate the compensation pitch angle Δβ′,

Δβ′ regulate with the system frequency. When Δf = −Δfmax, Δβ′ is equal to 0, and βref = βmppt. When Δf = 0, Δβ′ is equal to Δβ, and βref = βde (the pitch angle in de-loaded mode).
As shown in the modified pitch angle control description in Figure 10, wind speed information is not required. The pitch angle can help the de-loaded operation and the frequency regulation of wind turbines in medium and high wind speed areas.
Case study
In this section, simulations using MATLAB/SIMULINK 2018 Student Suite Version, MathWorks, Natick, MA, USA are carried out to verify the proposed frequency regulation scheme’s efficacy.
Figure 11 shows the single bus model of the small isolated power system used in the paper. It includes static loads, one thermal plant, one hydropower plant, and one aggregated DFIG-based wind power plant. The total capacity of the power systems is 1250 MW.

Single-line diagram of test power system for simulation.
Simplified governor-based models from Akbari and Madani (2014) are used to simulate thermal and hydropower plants (see Figure 12).
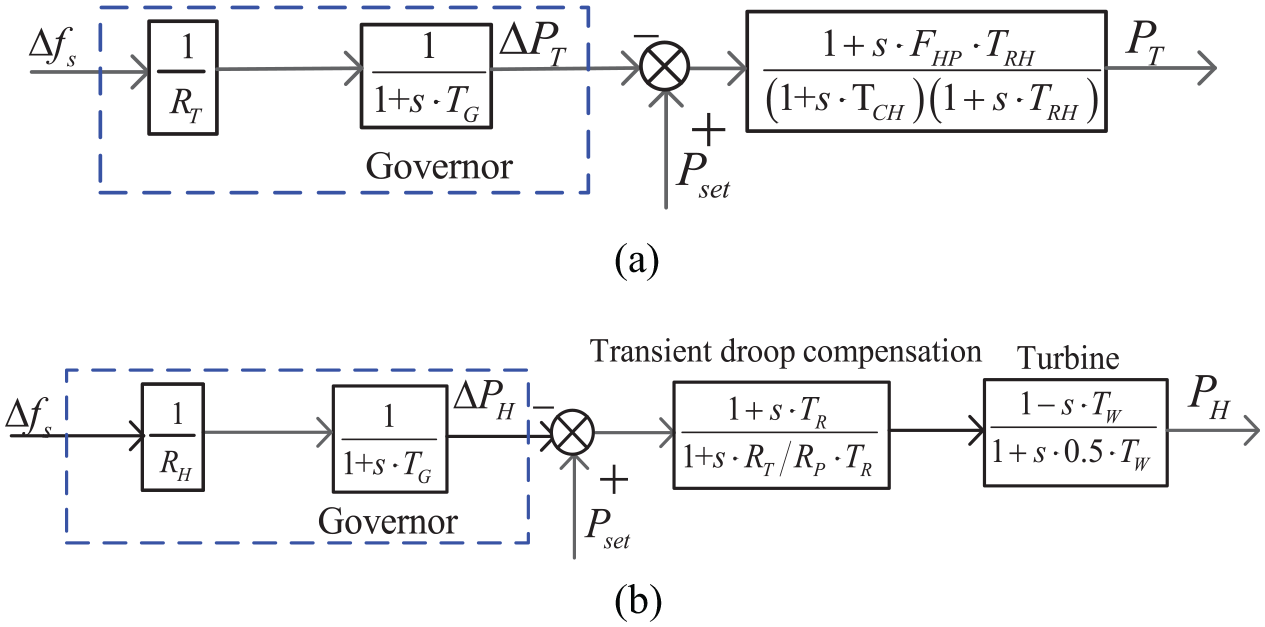
Governor-based models of conventional power plants: (a) Single-reheat steam plant (b) Hydro plant.
The droop characteristics of conventional plant speed governors have been enabled. The values of the most significant parameters are summarized in Appendix Tables A2 and A3.
To simulate the wind power plant, an equivalent generator with 100 times the nominal power of one DFIG is assumed. The parameters of DFIG-based VSWTs are given in Appendix Table A1. The performance of the proposed scheme for DFIG-based VSWTs is compared to that of MPPT, the conventional FRS with fixed gain under various wind speeds.
In traditional FRS with fixed gain, Kw is set to 30 and 15, while 1/Rw is set to 24 and 7. Under medium wind speed conditions, when a larger gain is selected, the inertial control performance of the DFIG can be effectively improved while ensuring stable operation. In comparison, a smaller gain is selected to maximize the lowest frequency point (FN) while ensuring stable operation of all DFIGs under low wind conditions. It is worth noting that the values of large gain and small gain are just an example of traditional FRS. If the system changes, these values should be changed appropriately.
Cases 1, 2, and 3 refer to the constant wind speed in the low wind speed area, the medium wind speed area and the high wind speed area, respectively. In cases 4 and 5, the wind speed is assumed to be reduced at the instant of an event, from 9 to 7.5 m/s for 10 and 1 second, respectively. Case 6 is the random wind speed in low wind area. In all cases, if the rotor speed reaches ωmin, the FRS (not including de-loaded control) are disabled by disconnecting the frequency measurement.
Compared with the decreased output power, DFIG-based VSWTs have more difficulty increasing the output power when the frequency dips. Thus, at 60 seconds, the system load suddenly increases by 0.1 pu and causes a frequency dip event for all cases.
Effects of wind speeds
Case 1: Low wind speed area
Figure 13 illustrates the results for a wind speed of 8 m/s in the low wind speed area, where the DFIG-based VSWTs only use overspeed control to realize de-loaded control. Figure 13 shows the result of Case 1.
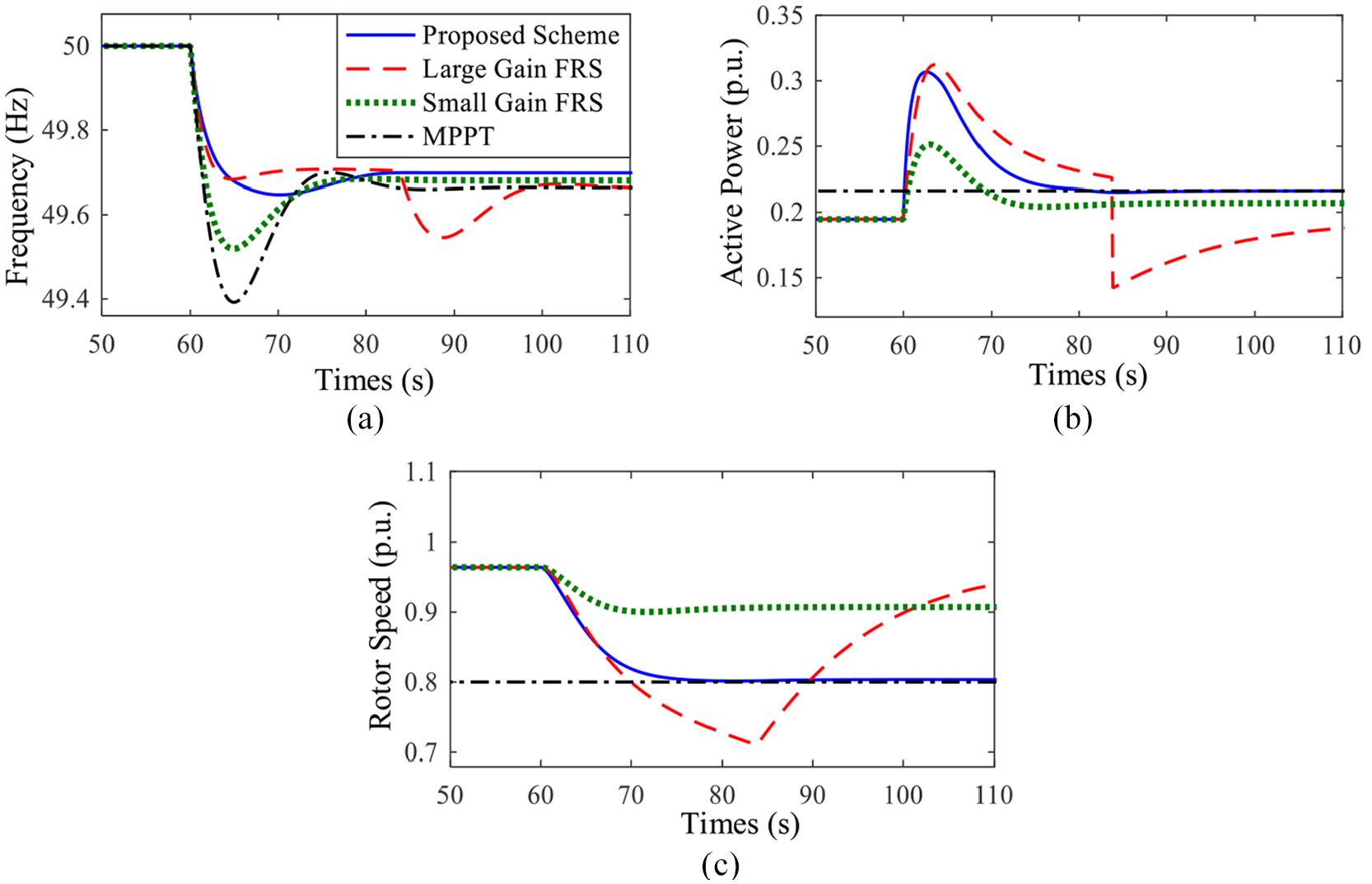
Results for Case 1: (a) system frequency, (b) active power of DFIG, and (c) rotor speed of DFIG.
Before 60 seconds, for the traditional FRS and the proposed FRS, the initial power is maintained at 0.9 Pm, which is 0.194 pu. The output power of MPPT always remains at the maximum power of 0.216 pu.
For the large gain FRS, the system frequency reduction speed is slower than that of the small gain FRS and the proposed scheme. Because the large gain FRS releases more power in the initial stage of the grid, the rotor speed decreases more. As shown in Figure 13(c), at 83.86 seconds, the speed of the DFIG reaches ωmin. To protect the wind turbine, the frequency support control is disabled and causes sudden active power drops, which result in a secondary frequency dip. The first frequency nadir (FN) is 49.68 Hz, and the second FN is 49.55 Hz.
The small gain FRS can ensure that DFIGs operate in a safe rotor speed range. However, due to the limited support it provides, its peak power is only 0.25 pu, and FN is 49.46. The steady frequency is 49.68 Hz.
For the proposed scheme, the peak power is 0.31 pu, larger than the small gain and smaller than the large gain FRS. However, it can prevent the wind turbines from excessively releasing kinetic energy through the modified power versus rotor speed curves. The rotor speed almost reaches but does not exceed ωmin. The FN is 49.65 Hz. It is 0.13 Hz higher than that for the small gains. The steady frequency is 49.7 Hz, 0.02 Hz larger than the small gain FRS.
Figure 14 illustrates the result of the operation at a wind speed of 10 m/s.

Results for Case 1: (a) system frequency, (b) active power of DFIG, and (c) rotor speed of DFIG.
Due to the increase in wind speed, the traditional large-gain FRS’s rotor speed does not exceed the lower limiter. Compared with the large gain FRS, the proposed scheme shows a better performance. The reason is that the proposed FRS has a potential self-adaption. With increasing wind speed, the active power for the frequency support increases.
The FN of the small gain FRS is 49.48 Hz, the steady frequency is 49.67 Hz, the FN of the large gain FRS is 49.65 Hz, the steady frequency is 49.7 Hz, and the proposed frequency is 49.7 Hz, which is 0.05 Hz larger than that of the large-gain FRS. The steady frequency is 49.72 Hz, which is 0.02 larger than the large gain FRS.
Case 2: Medium wind speed area
Figure 15 illustrates the result of Case 2. In this case, the wind speed of the DFIG is 11 m/s in the medium wind area.
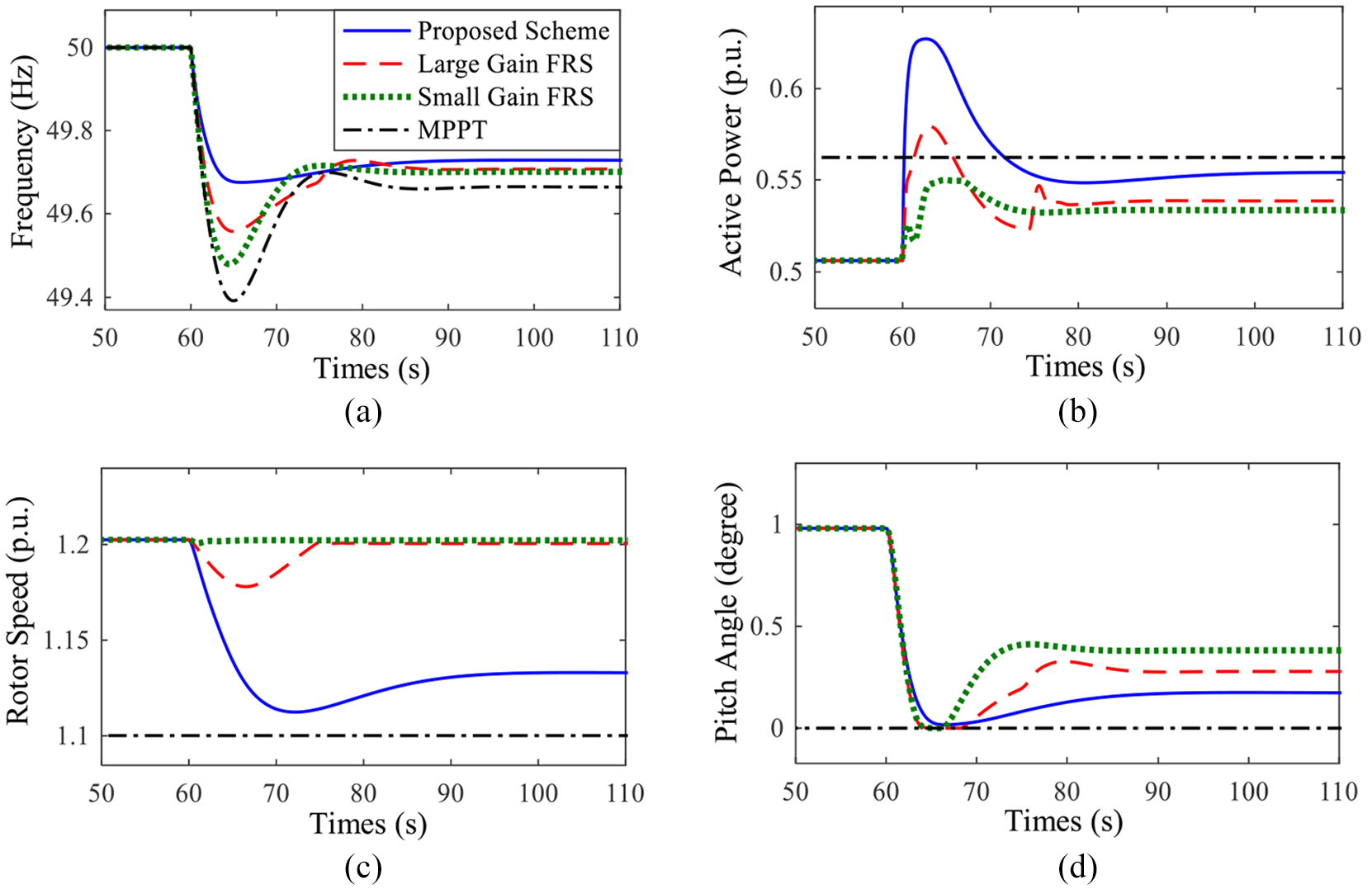
Results for Case 2: (a) system frequency, (b) active power of DFIG, (c) rotor speed of DFIG, and (d) pitch angle.
As shown in Figure 15(a), the FN of the traditional small gain FRS is 49.48 Hz, which is 0.08 Hz higher than the FN of MPPT control but 0.08 Hz lower than the FN of the large gain FRS. The proposed scheme’s FN is 49.73 Hz, which is 0.17 Hz higher than the large gain FRS. The proposed scheme’s steady frequency is 49.7 Hz, 0.03 Hz larger than the large gain FRS and 0.04 Hz larger than the small gain FRS.
In Figure 15(b), the output power of MPPT is always the maximum power of 0.5623 pu. Before 60 seconds, the traditional scheme and the proposed scheme maintain an initial power of 0.9. Initially, the proposed scheme’s additional power is greater than that of the large gain and the small gain FRS. The designed inertia power curve is used to provide inertia support. The peak power of the small gain is 0.55 pu, that of the large FRS is 0.58 pu, and that of the proposed scheme is 0.627 pu.
In Figure 15(c), the selected large- and small-gain FRSs can ensure that the DFIG works in the safe rotor speed range. The rotor speed of the proposed scheme converges to a lower value than the large gain FRS. Due to the potential self-adaption, the proposed scheme can adaptively release more KE from the DFIG.
As shown in Figure 15(d), pitch angle control is activated to provide de-loaded and frequency support control. Before 60 seconds, the DFIG runs under de-loaded mode, and the pitch angle is approximately 0.98. After 60 seconds, the pitch angle decreases to release extra power for frequency support. The proposed scheme shows a deeper pitch drop than the others. It seems that the proposed scheme can better utilize rotor speed control to provide frequency support.
Case 3: High wind speed area
Figure 16 illustrates the result of Case 3. In this case, the wind speed is 13.6 m/s in the high wind speed area.

Results for Case 3: (a) system frequency, (b) active power of DFIG, (c) rotor speed of DFIG, and (d) pitch angle.
In high wind speed areas, the frequency regulation is depended on the pitch angle control. Figure 16(c) shows that the rotor speed is near 1.21 pu for all the control schemes. In Figure 16(d), the proposed scheme’s pitch angle drops deeper than that of the traditional scheme. Therefore, the output power from the wind turbine is higher than that of the large gain FRS. The FN of the proposed scheme is better than that of the large gain FRS. As shown in Figure 16(a), the FN of the small gain FRS is 49.59 Hz, which is 0.03 Hz lower than the large FRS and 0.09 Hz lower than the proposed scheme.
Because of the different drop level of the pitch angle, the proposed scheme’s steady frequency is the best, that is, 49.79, while the steady frequency of the large-gain FRS is 49.77 Hz, and that of the small-gain FRS is 49.74 Hz.
The results of the three cases clearly show that the proposed scheme can provide better frequency support than the traditional scheme for the whole wind speed range, regardless of low, medium, and high wind speeds. It has the potential to provide adaptive frequency support for different wind speeds and prevent overdeceleration of the DFIG.
Effects of varying wind speeds
This section introduces the test results under variable wind speed conditions. The wind speed decreases at different time intervals, and the actual random wind speed is considered.
Case 4: Decreasing wind speed from 9 to 7.5 m/s for 10 seconds
Figure 17 illustrates the result of Case 4, where the wind speed decreases from 9 to 7.5 m/s for 10 seconds at 60 seconds.

Results for Case 4: (a) wind speed, (b) system frequency, (c) active power of DFIG, and (d) rotor speed of DFIG.
The proposed FRS prevents the rotor speed from exceeding ωmin and the rotor speed converges to 0.77 pu rapidly, which is a smaller value than the small gain FRS. Its FN is 0.02 Hz larger than the small gain and 0.18 Hz larger than the secondary frequency drop of the large gains FRS.
Case 5: Decreasing wind speed from 9 to 7.5 m/s for 1 seconds
Figure 18 shows the result of Case 5. In this case, the wind speed was reduced from 9 to 7.5 m/s at 60 seconds for 1 seconds.

Results for Case 5: (a) wind speed, (b) system frequency, (c) active power of DFIG, and (d) rotor speed of DFIG.
Compared with Case 4, the wind speed reduction is faster than that in Case 4. This results in a faster reduction in the rotor speed than Case 4. Along with the wind speed reduction, the output power of the wind turbine decreases.
For the small gain FRS, the wind turbine still has stable operation, and the FN is 49.41 Hz, 0.07 Hz lower than the small gain FRS in case 4.
However, for the large gain FRS, the rotor speed reaches ωmin at 70.6 seconds, which is 2.5 seconds earlier than case 4, and it causes a secondary frequency drop to occur. The secondary FN at 74.47 seconds is 49.3 Hz.
Conversely, our proposed scheme can still successfully prevent overdeceleration even in this case by rapidly reducing the active power, as shown in Figure 18(d). The speed converges to a safe value of 0.77 pu. The FN is 0.05 Hz higher than the small gain FRS. The steady-state value of the frequency is similar to the large gain.
Case 6: Random wind speed
Figure 19 presents the simulation results of case 6. The actual measured wind speed (low wind speed area) in Northeast China. The load suddenly increases 0.1 pu at 60 seconds.

Results for Case 6: (a) random wind speed, (b) system frequency, (c) active power of DFIG, and (d) rotor speed of DFIG.
For MPPT, the active power is only affected by wind speed. The wind turbine does not participate in frequency regulation. The FN is 49.38 Hz.
The stable operation of the DFIG can be ensured in small gain FRS. However, the additional active power for the frequency regulation is insufficient. The FN is 49.59 Hz, which is 0.12 Hz lower than the proposed scheme.
Due to the excessive active power released in the large gain FRS, the rotor speed drops fast and exceeds ωmin at 130 seconds, causing a secondary frequency drop. The secondary FN is 49.42 Hz, which is the lowest value in this case.
From Figure 19(b), before the FRC disabled, the large gain FRS shows a slightly better frequency response than the proposed FRS. However, it will result in an overdeceleration of the DFIG and cause a secondary frequency dip.
The simulation results of cases 4, 5, and 6 verify that even under variable wind speed conditions, the proposed scheme still prevents the wind turbine from over decelerating.
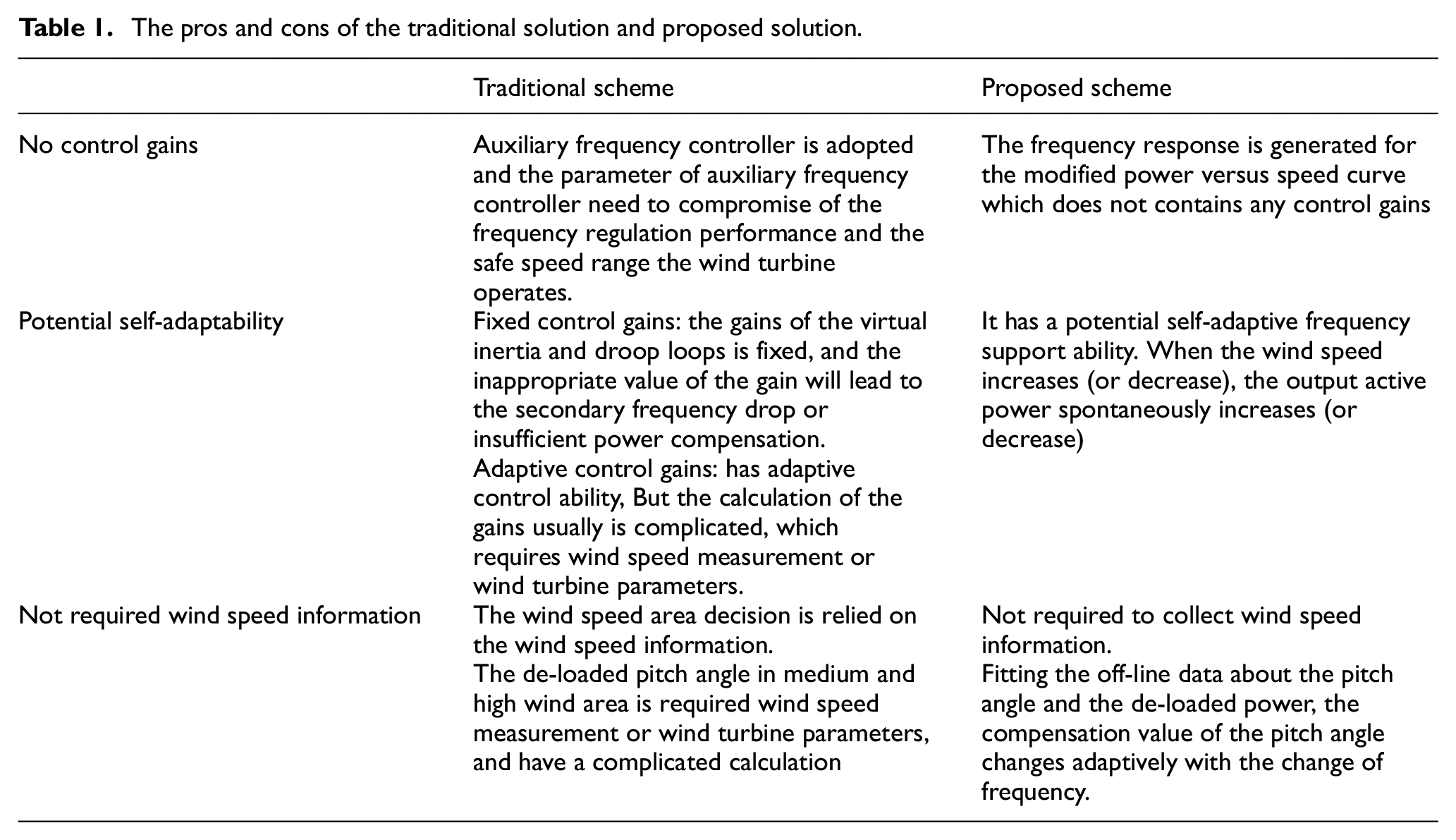
In summary, the pros and cons of traditional and proposed solution are listed in Table 1 below.
The pros and cons of the traditional solution and proposed solution.
Conclusion
With the high penetration of wind power generator, the frequency stability is still a critical issue in the power system because of the reduction of the inertia and frequency regulation capability. This paper proposes a novel frequency regulation scheme based on parameterized power curve for the de-loaded wind turbine during the whole wind speed range.
Compared with the existing scheme, the auxiliary frequency controller is replaced by a modified power versus rotor speed curve according to the frequency deviation and the rate of change of the frequency to provide both inertia and a droop frequency response. In the traditional scheme, the control gains of the auxiliary frequency controller are hard to select because of the compromising of the rotor speed safe and the frequency regulation performance. However, the proposed scheme does not contain any gains and can be applied to WTGs with different wind speeds. Further, it has a potential self-adaptability that the active power will automatically increase with wind speed increases.
An improved pitch angle control is designed which is generally adapts for the whole wind speed range without wind speed information. The curve of the de-loaded pitch angle versus de-loaded power is fitting by off-line modeling. And then, the compensation pitch angle is simply calculated by frequency measurement information, avoiding the use of wind speed information and the complicated calculation.
The comparison simulation results under low wind speed, medium wind speed, high wind speed, and variable wind speed were evaluated. The simulation results clearly show that the scheme has a better performance than the traditional frequency regulation strategies for improving the frequency response and preventing rotor speed over deceleration under variable wind conditions.
Footnotes
Appendix
Hydro-power plant parameters.
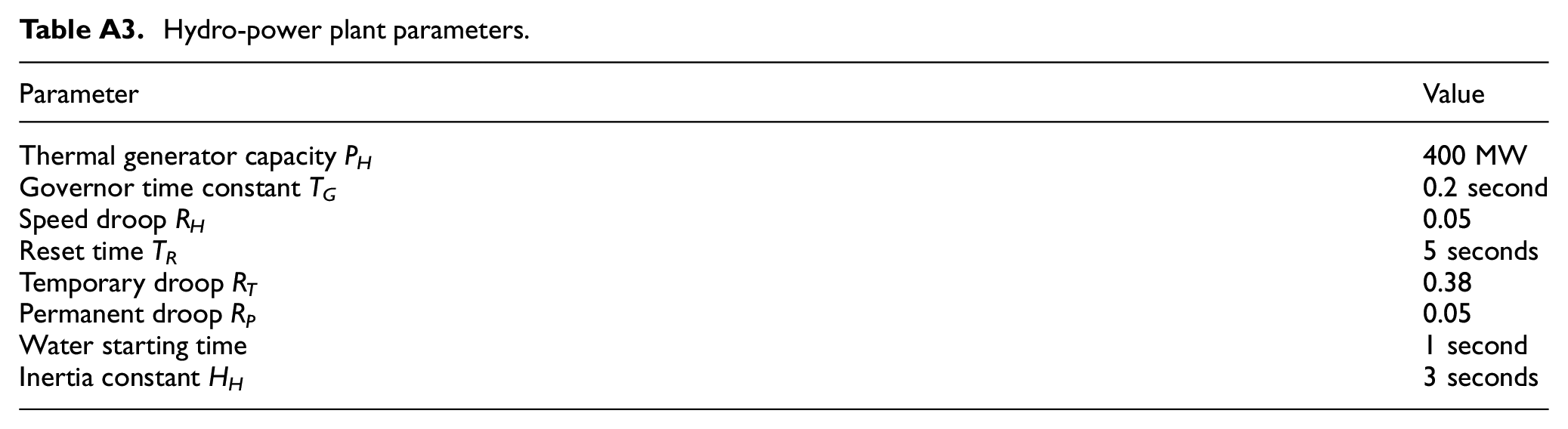
| Parameter | Value |
|---|---|
| Thermal generator capacity PH | 400 MW |
| Governor time constant TG | 0.2 second |
| Speed droop RH | 0.05 |
| Reset time TR | 5 seconds |
| Temporary droop RT | 0.38 |
| Permanent droop RP | 0.05 |
| Water starting time | 1 second |
| Inertia constant HH | 3 seconds |
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article was funded by National Natural Science Foundation of China (Grant id 52077030, U18866601) and Jilin Province Science and technology development plan project (Grant Id 20190201289JC).