
Abstract
The exploitation of nature to convert energy to electrical power is the most important rule in power generation. Wind energy is one of the most important of those energies that are widely available, and its use does not affect the environment significantly compared to fossil energy. On the other hand, and in recent times, researchers have made great efforts in the field of intelligent control and optimization, which has led to great leaps in the development of these sciences. In this paper, a detailed study is proposed for filling the gaps and conducting an updating state-of-arts of the last pitch control methods in the wind turbine systems. The review is conducted by comparing the key requirements related to control, complexity, stability and speed rangeability. Furthermore, a new classification for the general controller is introduced according to the techniques. Several recommendations for future research related to the control and technical evaluation of wind energy are presented. In sum, the appropriate classification of such important issues and identification of their advantages and drawbacks may greatly contribute to find better solutions.
Introduction
The use of potential and kinetic energies is one of the most attractive research areas that has attracted the interest of engineers for many years (Gutierrez et al., 2022; Habibi et al., 2022; Pöschke et al., 2022; Rahman et al., 2022; Yarmohammadi et al., 2022). Since the huge development in clean energy (CE), the wind farms have a rapid growth, especially in the last decade (Golnary and Tse, 2021; Karimpour et al., 2021; Li et al., 2022; Pan et al., 2022; Tang et al., 2022). Nowadays, the overall wind power capacity reached 837 GW, which is helped the world to avoid over 1.2 × 109 ton of
At the same time, the fast and robust development of the new AI controllers has widened the field of applications to include all engineering, medical and economic applications (Abdalrahman et al., 2021; Cao et al., 2021; Hussein and Jaber, 2020). Those qualitative leaps in the field of intelligent control included all kinds of innovations in AI controllers such as fuzzy logic controller (FLC) and neural networks (NN) or the setting of traditional controller parameters using the Artificial Intelligence (AI) such as Particle swarm optimization (PSO), Firefly algorithm (FA), Elephant herding algorithm (EHA), and genetic algorithms (GA) (Campos-Mercado et al., 2021; El-Naggar et al., 2021; Fan and Ma, 2022; Mokhtari and Rekioua, 2018; Nugroho et al., 2019). Moreover, the hybrid control technique utilized in these studies to maximize the efficiency of power conversion (Kahla et al., 2021; Khan et al., 2022; Moradi et al., 2020).
Researchers had a variety of state-of-art studies based on wind generator controls, active flow controls, structural behaviors, load monitoring, enhancements, modeling, analysis, voltage controls, maintenances, assessments, applications, and developments (243037Al-Shetwi et al., 2020; Goudarzi and Zhu, 2012; Jena and Rajendran, 2015; Karad and Thakur, 2021; Liu and Zhang, 2020; López-Manrique et al., 2021; McMorland et al., 2022; Mughal and Guojie, 2015; Njiri and Söffker, 2016; Porté-Agel et al., 2020; Ringwood and Simani, 2015; Sahu and Behera, 2022; Shah et al., 2021; Shirsath and Agrawal, 2020; Tonin, 2018; Zhang et al., 2021; Zhang and Huang, 2011; Zuo et al., 2020). McMorland et al. (2022) introduced a review of previous decision systems for offshore wind turbine operating and planning, and the way to apply these earlier models to novel turbine concepts. Mughal and Guojie (2015) studied seven numerous control methodologies that were applied to the wind system. Al-Shetwi et al. (2020) assessed a control system depending on a comparison of the requirements related to stability, voltage dip, power quality, and apparent power. Zuo et al. (2020) provided a review for the applied vibration control methods on wind systems depending on two control strategies and reviewed the components details of the wind turbines as well. Liu and Zhang (2020) summarized the bearing failure modes, monitoring, and fault diagnosis for the high-power wind turbine.
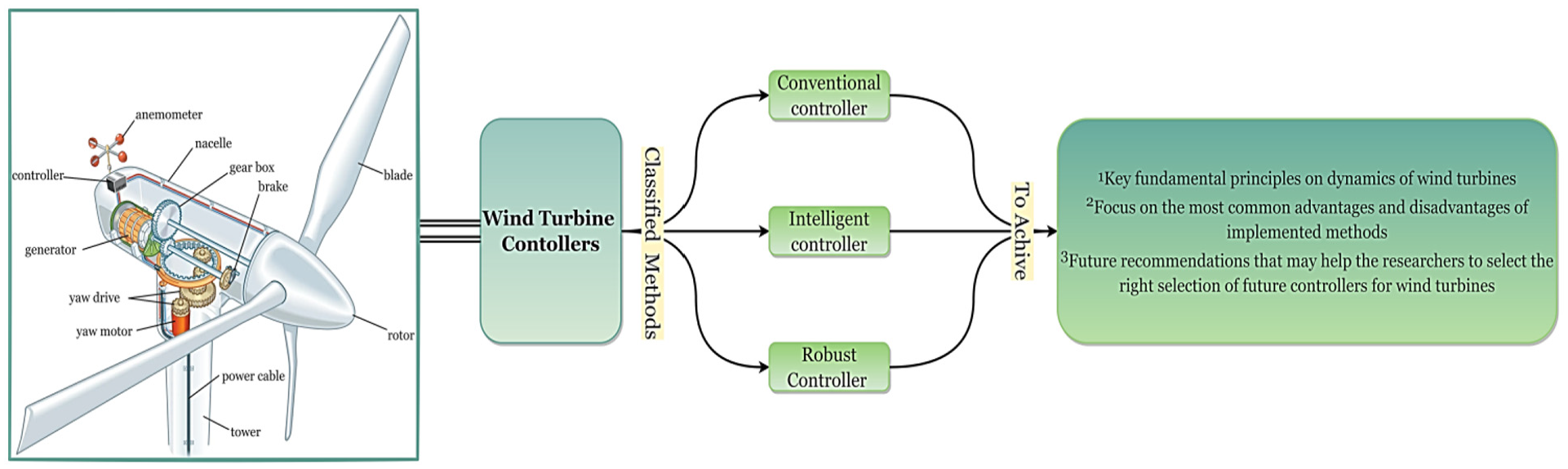
However, the wind turbine speed controllers still need more efforts for deep reviewing and analysis to help the researchers for thinking through various aspects of such controllers in the future and then applied more efficient controllers. This paper aims to systematically and comprehensively summarize the controller types in wind turbine topic. Also, a new group of the controllers is proposed to control the state-of-art pitch wind turbine systems. The controllers are categorized into three main types, conventional, robust non-intelligent, and intelligent. Additionally, the intelligent types are divided into three types, FLC, NN, and FLC type-2. While the conventional types are divided into two types, the trial-and-error setting parameters, and the auto setting parameters that are done by AI or conventional methods. Additionally, we summarize the benefits and drawbacks of the controllers that were used in the wind turbine systems. Finally, future recommendations and conclusions drawn from the review of the previous papers are included in this work.
Wind turbine modeling
In the atmosphere, air masses move because of the thermal difference conditions of the air. These air masses’ motion can be found as a global phenomenon or a jet stream, as well as a regional phenomenon. Wind turbines utilize the energy of wind near the ground to generate electrical power (Alpi, 2019; Azrag et al., 2019; Bahmani et al., 2020; Faraji Nayeh et al., 2020; Garmat et al., 2020; Habibi et al., 2018; Hussein and Jaber, 2020; Jaber et al., 2012; Jahanshahi Zeitouni et al., 2020; Kakuya et al., 2020; Karami-Mollaee et al., 2022; Khurshid et al., 2022; Kim et al., 2019; Lackner and Rotea, 2011; Mirzaei et al., 2016; Moradi and Vossoughi, 2015; Movahhed Neya et al., 2022; Ngamroo, 2012; Nouriani and Moradi, 2022; Ossmann et al., 2021; Reddy and Hur, 2021; Soni, 2015; Tahir et al., 2019; Takatsu et al., 1991; van der Veen et al., 2013; Wei et al., 2018; Yang and He, 2020). In this area, the wind is subject to boundary layer conditions, due to the roughness of the ground, the wind stream flow near the ground is turbulent (Bahmani et al., 2020; Kakuya et al., 2020; Movahhed Neya et al., 2022; Nouriani and Moradi, 2022; Oubelaid et al., 2023). The change in wind speed depends on the height and on the local conditions. The factors that normally determined the torque and the output power of the wind turbine are the speed of the turbine, rotor blade tilt, rotor blade pitch angle, turbine area, wind speed, and turbine size and shape (Khurshid et al., 2022; Kim et al., 2019).
The mathematical model of the wind turbine typifies the relationship between the various factors and the output power. Here lies the importance of the mathematical model to understanding the behavior of the wind turbine over its region of operation and also modeling enables control of the wind turbine’s performance.
The main components of a wind turbine are the blades, gearbox, and generator. According to the stochastic phenomena of the wind source, the speed of wind can be given by (Mir et al., 2024):

Where

Where


Where
The energy and output power of the are:


Where
The power coefficient (

The torque of turbine is given by the equation:

The power coefficient Cp is a function of the tip speed ratio (λ) of the wind turbine and angle of the blades (β) pitch angle (Belkhier et al., 2023).

Where:

The control system is done by control the electromagnetic torque
Wind turbine controller
More than a century since the first signs appeared of the controller term by Elmer Sperry, there is a punch of control system classification methods that may we identify the solution to problems (Alpi, 2019). The control may be classified according to the loop number, input and output number, complexity, feedback system, or the controller type (Hussein and Jaber, 2020; Jaber et al., 2012). While the controller quality is measured by the robustness, oscillation, overshoot, undershoot, and settling time. In such wind turbine issue, it is identified as a complex, multi-loop, and multi-input-multi-output (Faraji Nayeh et al., 2020; Ossmann et al., 2021; van der Veen et al., 2013). So, it is preferred to classify turbine control according to the controller type. In this paper, we classified the controllers into two types which are conventional and intelligent controllers. Figure 2 illustrates the controller types for the wind turbine that suggested in this work.
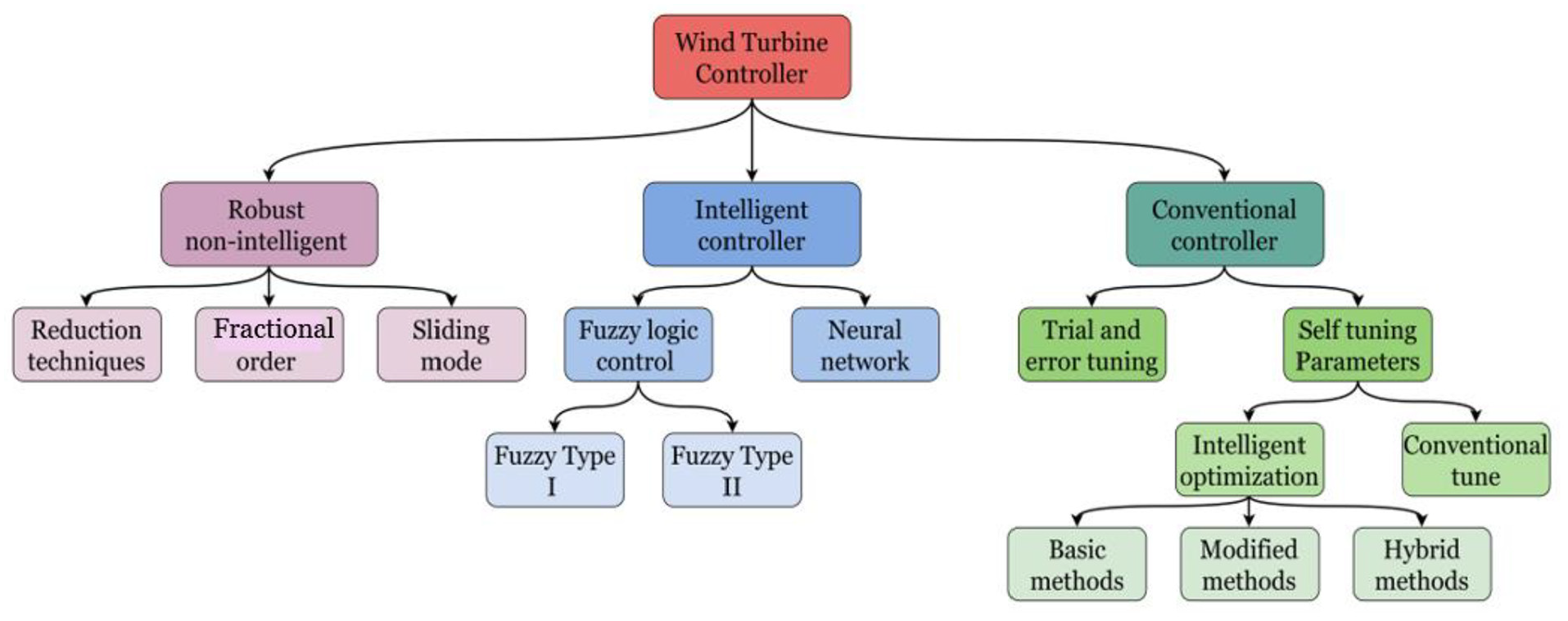
Wind turbine controller methods.
Conventional controllers
Generally, the conventional PID, PI, PD, controllers represent the base for the most common controllers which are utilized in engineering applications. Even the AI controller concepts depend on the conventional controller in most of controller modeling. The mechanism of conventional controllers is minimizing the difference between the actual value of a system by monitoring and scaling the proportional, differential, and integral error values between the reference and actual output values of the controlled system. Since engineers started to use wind turbine energy, conventional controllers were the first techniques in this field. Furthermore, the H∞ and H2 controllers could be assumed as conventional controllers (Karad and Thakur, 2021).
Trial-and-error PID setting
One of the oldest methods to tune the PID parameters is the trial-and-error strategy. Although that method is good for the simple control system, there are quite a few attempts for wind turbine control. Byword, Wei et al. (2018) introduced a PID 600 kW hydraulic wind turbine model and control. To overcome the short time change of the wind speed, the wind power was transformed into hydraulic power and then the hydraulic system output was converted to electrical power during that short time. Both PID controllers were set by trial-and-error depending on the responses of the systems. Also, Soni (2015) used the conventional PID to control the wind turbine with constant output frequency. The estimated PID parameters were done by trial-and-error until reaching the desired performance.
Self-parameters setting
The main advantages of controller self-tuning are to help the operators to reach acceptable results without any special knowledge of control theory, fast and auto change in parameters values follow up on changes in the plant dynamics, and the ability to change the parameters without disturbing plant operations (Takatsu et al., 1991). However, online or offline self-tuning operations may need a long duration of processes, oscillation of process output, or long-range observations of the process output. In this paper, in a self-parameter setting, the study is focusing on two main types, the classical and the intelligent tuning methods. Figure 3 shows the general mechanism for the parameters’ setting of the controllers.
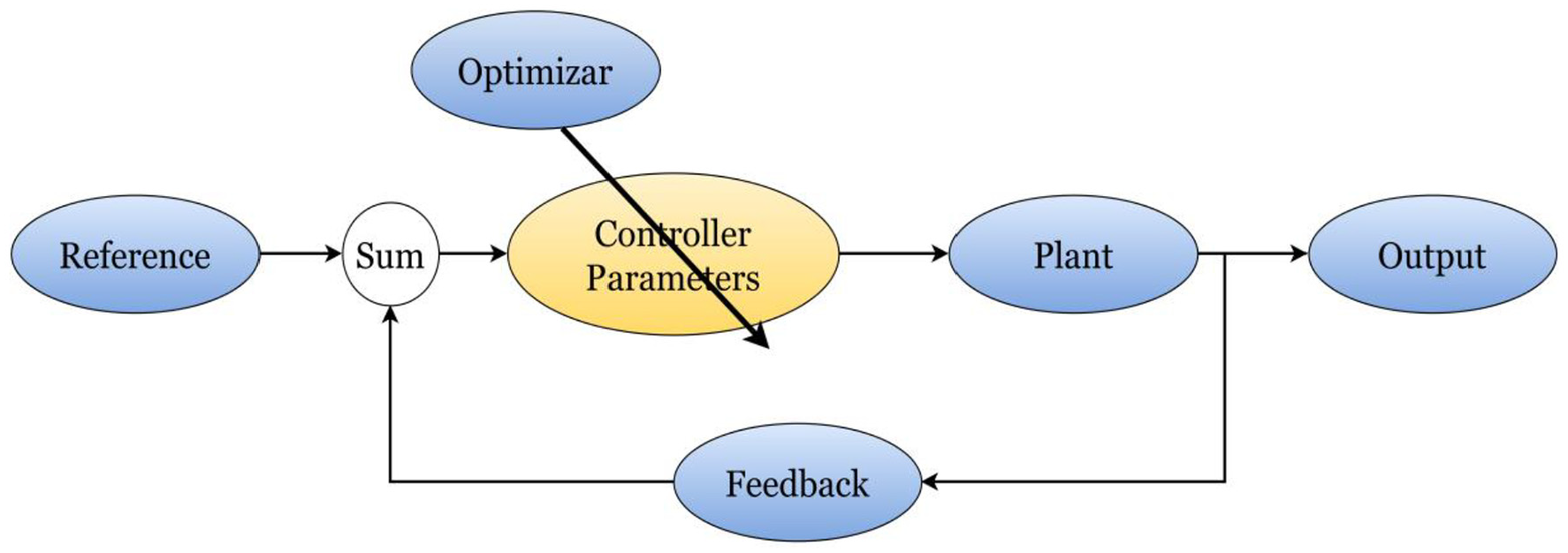
General mechanism of parameters optimization.
Conventional self-parameters setting
The conventional parameter setting methods use only special limited characteristics of the controlled system obtained from the disturbances (Azrag et al., 2019). The general features of the conventional parameter settings are simple and able to do in the short calculations. Many practical and theoretical state of arts became available via conventional parameter settings of wind turbine issue in last 30 years (Garmat et al., 2020; Habibi et al., 2018; Jahanshahi Zeitouni et al., 2020; Lackner and Rotea, 2011; Mirzaei et al., 2016; Moradi and Vossoughi, 2015; Ngamroo, 2012; Pérez-Estrada et al., 2018; Poureh and Nobakhti, 2020; Ranjineh Khojasteh and Toshani, 2022; Reddy and Hur, 2021; Ringwood and Simani, 2015; Sahu and Behera, 2022; Surinkaew and Ngamroo, 2014; Yang and He, 2020; Zhu et al., 2014).
For epitome, Mirzaei et al. (2016) optimized the wind turbine controller by the pole-placement method to reduce the integral absolute error (IAE) of the speed response. The pole-placement was compared with Ziegler-Nichols using MATLAB summation. Garmat et al. (2020) studied the PID and LQ results via 4 and 8 controller modes. A 2 MW wind turbine system was considered to assess the controllers’ performers. Participation minimizes the fluctuations in the output power produced by the fluctuation in the input energy. Habibi et al. (2018) developed a PID-based fault-tolerant controller for wind turbines. The Nussbaum-type function was selected to set the controller parameters. Reddy and Hur (2021) simulated three optimized controllers of a 5 MW wind turbine by high fidelity aero elastic. The simulation divided the wind speed into three modes (very slow speed range, medium speed range, and the above-rated speed range) and determined their corresponding parameters. The simulation results of the linear quadratic Gaussian, H∞, and model predictive were compared with conventional PSO. Jahanshahi Zeitouni et al. (2020) applied the active disturbance rejection controller as a future advanced controller. The wind turbine was the case of the study to show the difference between hardware and software of power system applications. Moradi and Vossoughi (2015) adopted a DK iteration algorithm to regulate an H∞ controller that suggested controlling the system of a wind turbine. The electric grid and operation systems oscillation reduced after the implementation of the controller. Yang and He (2020) could control the floating offshore wind turbine by the tuning of the mass dampers and reduced vibration effects. The simulation validated that reduces the platform pitch motion at low-frequency vibration of the tower top fore-aft drift, even the nacelle was effective for the high-frequency vibration of the tower top fore-aft drift. Lackner and Rotea (2011) simulated a floating barge-type wind turbine passive and active controllers. The performances of both controllers were measured using the dropping in load stress at the time of tower base bending.
The intelligent self-parameters setting
Optimization mentions to any estimation procedure for input parameters to a function that results in the optimum output of that task. Basically, major AI algorithms are nature-inspired for instance GA, PSO, Garra Rufa optimization (GRO), Artificial bee colony (ABC), and Ant colony optimization (ACO) (Abdelbadie et al., 2022; Aboulem et al., 2017; Bekakra and Attous, 2014; Ben Smida and Sakly, 2019; Civelek et al., 2016; Ding et al., 2019; El-Naggar et al., 2021; Fan and Ma, 2022; Hannachi et al., 2021; Hassan et al., 2015; Iqbal et al., 2020; Jaber et al., 2020; Kharrich et al., 2018; Laina et al., 2018; Mohamed et al., 2022; Mokhtari and Rekioua, 2018; Noor et al., 2011; Nugroho et al., 2019; Oussama et al., 2019; Sarkar et al., 2020; Wang et al., 2011). Before any of the algorithm applications are done, there are many benchmark functions to evaluate the efficiency of the optimization methods notably: Ackley FunctionBukin Function Drop-Wave Function Eggholder Function. So many improvements or hybridization might be found in the basic methods in case of failure to achieve acceptable results (Jaber et al., 2020). In sum, AI optimization algorithms are stochastic algorithms that work to keep an aggregation of expected solutions that are used to sample, reconnoiter, and hone in on the optimum population results. Figure 4 provides the flowchart of the AI algorithms operation system.
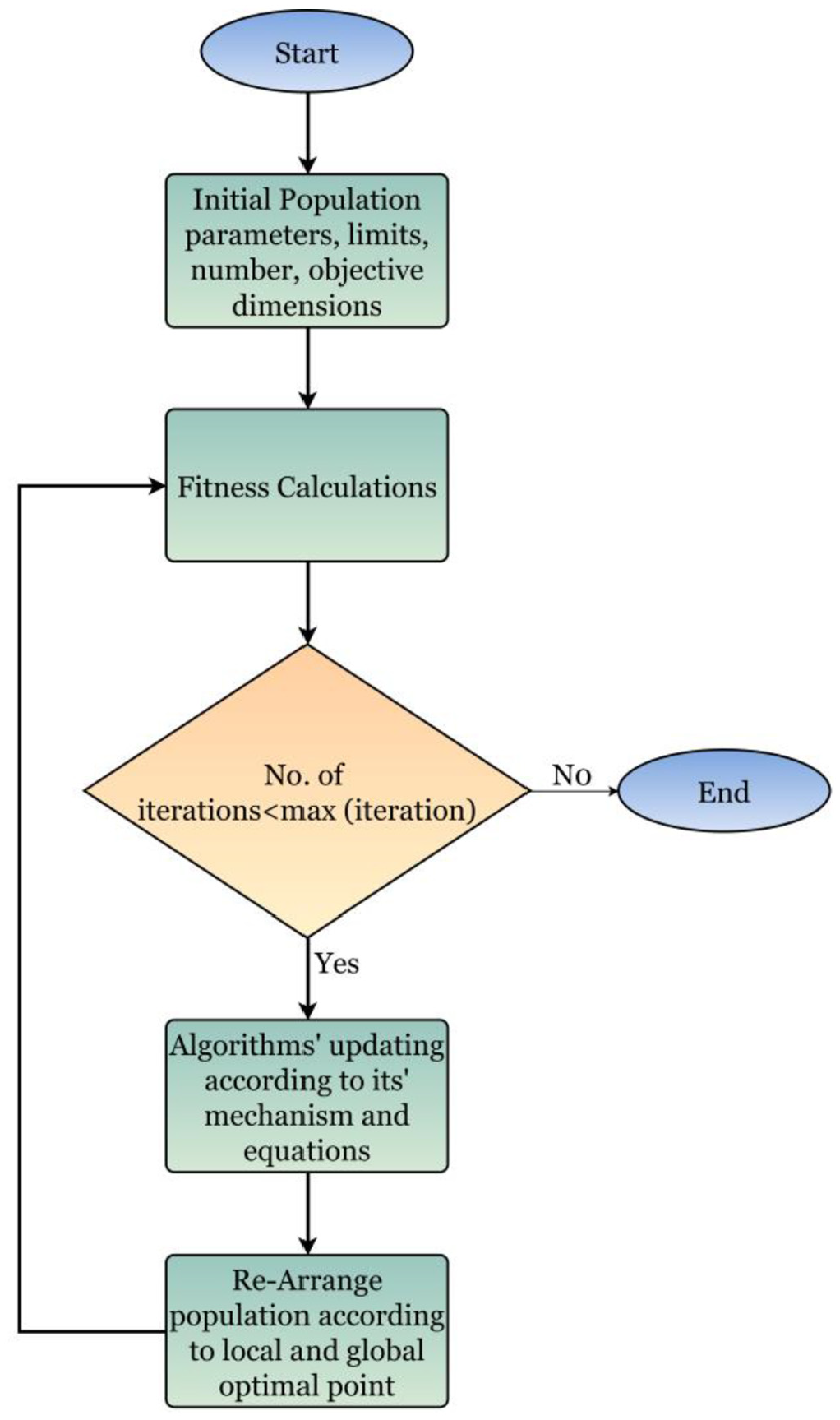
Optimazation mechanism flowchart.
Regarding to the wind control topic, we can classify the AI optimization techniques flowing the three types of algorithm behaviors, which are: basic optimization, modified algorithms, and hybrid algorithm. The basic algorithms have the lion’s share of PID optimization techniques in wind turbine systems. Such as, Sarkar et al. (2020) concluded that the ant colony optimization ability for tuning the PID was better in PID performance than PSO and Ziegler–Nichols methods. The root mean square error (RMSE) categorized those performances theoretically by MATLAB/Simulink. Abdelbadie et al. (2022) evaluated PI parameters using Archimedes optimization algorithm to enhance the stability of the wind energy diversion system incorporated with superconducting magnetic energy storage. Mohamed et al. (2022) sensed the population growth and contributed a determination method for appropriate PI parameters using teaching-learning optimization. The power maximization during drastic changes in wind speed for small wind turbines that energized a 14 KW generator. Kharrich et al. (2018) monitored the micro-grids of the generation cost in Baghdad and Rabat cities using PSO. The objective function of the optimization was the building cost of a microgrid hybrid system in cities that have similar renewable energy types and load capacities. Iqbal et al. (2020) realized the weak control of the conventional controller for nonlinear and uncertain systems, then they optimized the power, rotor speed, and torque of the wind turbine by PSO strategy. For the validation, MATLAB/Simulink and Bladed software implantation have been done on a 5 MW wind turbine. Oussama et al. (2019) developed a fractional order PID controller by introducing a parameter estimation method which was the bat algorithm. The optimal power during the slow speed and safety of the wind turbine during the high speed was the optimization issue of the pitch angle control. Aboulem et al. (2017) focused on two objective functions that were tracking and control of wind turbine systems. The sliding mode and PI controllers were hybrid and tuned using the PSO method to get robustness and fast controller also to limit the tracking error and chattering. Laina et al. (2018) used the same hybrid idea with the sliding mode controller, but they selected the PID instead of PI controllers. The modified algorithms can be done by editing the position or the speed of the nature-inspired equations or changing the loop system in the algorithm. Any kind of improvement could lead to increases in the algorithm parameters or the system. Even though, the modified the algorithms have been successful in a number of attempts of wind turbine topic. Hassan et al. (2015) proposed a modified PSO to select the controller number of the wind turbine as a part of the multi-objective function. The addition to the basic PSO was increasing the number of particles and the weight factor in case of the stop of convergence. Civelek et al. (2016) tuned the PID parameters using a new strategy of mutation and crossover in the genetic algorithm. The arrangement of mutation and crossover number and percentage depending on the previous solution was the basis of the modification. Ding et al. (2019) modified the flickering behavior of fireflies by using a parallel compact firefly to reduce the memory used for the optimization. This improvement aimed to select the optimal PID constant for small size variable pitch wind turbine. Before the application of the wind turbine, the authors validated the modification via 28 pinch mark functions.
Separated types of modifications by making a series, parallel, and embedding combination between more than AI methods; have been examined in electrical engineering especially the wind turbine control (Anantha Krishnan and Senthil Kumar, 2022; Bhanu and Pappa, 2017; Jaber et al., 2018, 2020; Jaikhang and Tunyasrirut, 2019; Kamarzarrin and Refan, 2020; Kim et al., 2013; Maroufi et al., 2020; Perng et al., 2014; Poultangari et al., 2012; Qiao et al., 2011; Shan et al., 2022; Sheikhan et al., 2013; Sun et al., 2020). The contributing parameters of each participating optimization method can be estimated as a function of simple case parameters. Figure 5 illustrates the combination strategies that applied in AI.
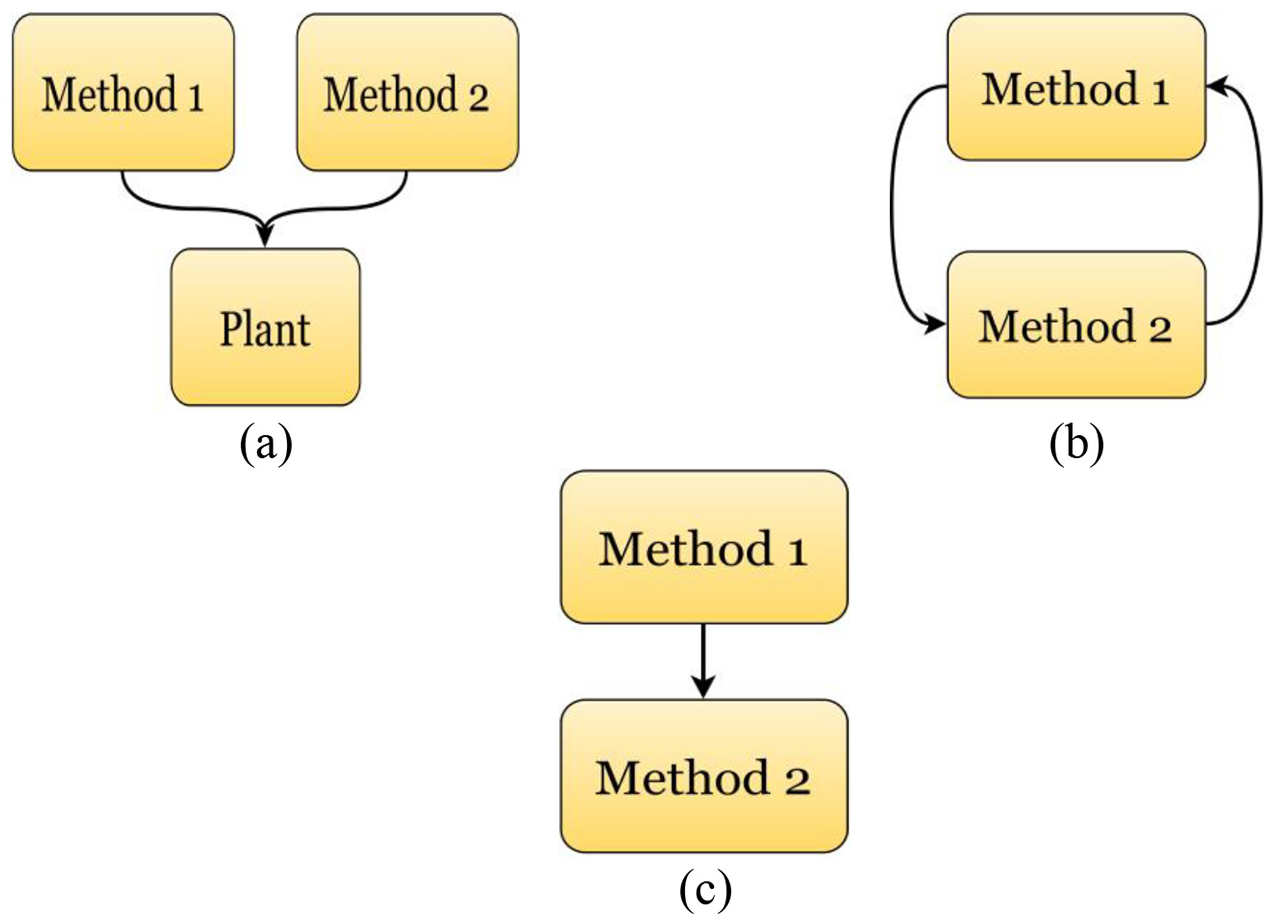
Hybrid optimization strategies: (a) parallel, (b) embedding, and (c) series.
Qiao et al. (2011) introduced two intelligent methods to optimize the PI constants which were PSO and mean-variance. Consistently, a nonlinear interface by NN controller was applied to coordinate the reactive power. The validation simulator has been studied using both PSCAD/EMTDC and RSCAD/RTDS. Sun et al. (2020) adopted a neural network wake-power type to predate and then the GA determine the yaw angle of a wind turbine. The hybrid between ANN and GA gave another validation that the wake steering could mitigating the starting affection on the output power generation. The controller GA optimization led to a rise in the output power in all directions reaching 0.96. In Anantha Krishnan and Senthil Kumar (2022) paper, Garra Rufa optimization and isolation forest were hybridized together to optimize the controller parameters for the micro-grid. The wind turbine controller was an important part of the grid. Sheikhan et al. (2013) used a hybrid of PSO and FLC to control a 5 MW wind turbine. Three sets of PI were founded by PSO, while the FLC worked as a decision maker in two stages. The first stage was to PSO determination of the optimal data sets to train the FLC. The second stage was trained the FLC using the data sets that estimated by the first stage seeking to reach the maximum power at any speed. Perng et al. (2014) proposed a hybrid strategy between PSO and radial basis function (RBF) NN to find the second and the third dimensions of PID parameters boundaries of the closed-loop wind turbine systems. The goal of the intelligent optimization was to reduce the delay time of the drive train model though the delay was existing in the pitch control. Jaikhang and Tunyasrirut (2019) perceived that the PI regulation by the usage of the hybridization between ANN and PSO is better in the rise time and power response compared with the other four artificial intelligent methods. Experimentally the comparison was on controllers of 200 and 400 W permanent magnet synchronous generators (PMSG). Poultangari et al. (2012) supposed that the PSO optimization method was providing suitable data sets to train a NN. The ANN-RBF was applied to identify the pitch PI controller parameter for a 5 MW wind turbine.
Intelligent controllers
The development of the fuzzy and neural controllers motivated the engineers to propose and design many control strategies able to obtain a high quality of wind energy (Bustan and Moodi, 2022). The AI controllers have a degree of freedom for self-learning or expecting the successful parameter setting in online and offline tuning (Eseoglu et al., 2022). According to this property, the intelligent controllers can be classified into fuzzy and neural networks. The NN and FLC could be joined to overcome the flaws of each method alone. This combination helped the engineering to control wind turbines to settle the speed regulation issue of the opportunity of self-tuning of parameters. In order to make an easy classification, in this paper, the intelligent controllers are classified into fuzzy and neural network controllers. Also, in wind control systems, the combination of the two methods has been studied in distinct studies under the topic of neuro-fuzzy (Abdul-Ruhman and Hawas, 2020; Benbouhenni et al., 2022a; Hooda and Malik, 2022; Lenz et al., 2020; Qingsong and Suxiang, 2012; Sahoo et al., 2020; Sierra-Garcia and Santos, 2022). For instance, Qingsong and Suxiang (2012) established a wind turbine model by neural/fuzzy estimator; then, the control system was done using fuzzy sliding mode and optimized by the neural network to overcome the wind variation influence. Sierra-Garcia and Santos (2022) take the advantage of high efficiency of neural/fuzzy in non-liner control and, they hybrid the fuzzy and neural by applying three steps; firstly, the enhancement of the forecasting for effective wind in wind turbines by deep learning neural network (DLNN). Secondly, the calculation of the currently effective wind in wind turbines by the same previous technique. At the end, using the output of the two steps as an input of the fuzzy logic controller (FLC).
Fuzzy logic control
The actuating of a FLC is effectively introduced by the piecewise particular curves that result in triangular, trapezoidal, or perpendicular membership functions (Abdul-Ruhman and Hawas, 2020; AlGhamdi et al., 2021; Ali Musyafa and Widjiantoro, 2016; Anil Naik, 2022; Benchabane et al., 2012; Parvathy and Gopinath, 2016; Bharani and Sivaprakasam, 2022; Bustan and Moodi, 2022; Chen et al., 2015; Ćirić et al., 2011; Dida and Benattous, 2016; Dou et al., 2010; El-Fahham et al., 2021; Eseoglu et al., 2022; Fan and Mu, 2019; Hassan et al., 2017; Hemeyine et al., 2021; Hilmansyah, 2016; Kesraoui et al., 2015; Leal-Ramirez et al., 2009; Meghni et al., 2017; Mendel, 2015; Mola and Shabaninia, 2014; Musyafa et al., 2011; Musyafa and Noriyati, 2012; Naik and Gupta, 2020; Rajendran and Jena, 2014a; Van et al., 2015; Yao et al., 2009; Zhang et al., 2012; Zouggar et al., 2019). The input and the output membership rule and proportional quantization factors need the support of practical experience or an efficient AI algorithm. Both type 1 and interval type 2 fuzzy controllers have a high ability for solving complex dynamic ecological systems (Eseoglu et al., 2022). The main difference between the two types is in the incorporation of uncertainties about the overlap. So that overcome the uncertainty about the direction of the execution in each time step in the fuzzy system, the type 2 fuzzy system has solved the issue by increasing the dimensions of the fuzzy memberships (Bustan and Moodi, 2022). Figure 6 illustrates an overview of the FLC system.

Fuzzy system: (a) fuzzy membership of type-1, (b) fuzzy membership of Interval type-2, (c) general components of a FLC system of type-1, and (d) general components of a FLC system of type-2.
Despite the complexity and nonsystematic mathematical specification of the two types of the fuzzy system, the controller has been succeeded the promising results in several studies. As a pattern, Abdul-Ruhman and Hawas (2020) achieved a high activity for following the load and speed variations using a nonlinear auto regressive-moving average of PI categorization. They validated their proposed method in conjunction with fuzzy and traditional PI controllers that were tuned by trial-and-error techniques. Hassan et al. (2017) involved the FLC in the pitch angle wind turbine system seeking for improving the feasibility, overshoot, and settling time. The harms during the high wind speed and continuous variations of nominal output generation power were the main challenges in Islamabad city. AlGhamdi et al. (2021) compensated the classical controller by fuzzy PI control for a wind farm of 120 MW in the Gulf El-Zayt. The MATLAB/SIMULINK validation has been done using several wind speed functions which were ramp, step, random, and extreme. Musyafa et al. (2011) overcame the low wind speed to produce high power by FLC. The engagement between the wind power and power of wind turbine were the input memberships while the output electrical power was the fuzzy output memberships. Musyafa and Noriyati (2012) applied the fuzzy controller to the fluctuating wind speed according to the previous 3 years’ data in Java, Indonesia. The tested prototype was able to regulate the input DC voltage limits from 14 to 28 V while the output voltage limits from 13.65 to 13.35 V. Kesraoui et al. (2015) inserted the fuzzy controller into the wind turbine system for purpose of limiting the effect of variation of the wind speed on the power generation. The output power result was satisfying enough during the MATLAB simulation of turbine pitch angle control. Rajendran and Jena (2014a) relied on the fuzzy integral sliding mode controller to maximize the power during the low wind speed. Development in the Newton Raphson method to calculate the exact effectiveness of the wind speed has been done during the simulation. Fan and Mu (2019) increased the output power compared to its corresponding wind rated speed by developing a nonlinear FLC. Lyapunov criteria were the judges for the controller’s stability estimation while the MATLAB/Simulink provided the output results dad for the system. Ćirić et al. (2011) attained the supervisory aero turbine control using the FLC for the variable speed wind turbine system. One special wind speed which was subcritical was selected to study the controller robustness. Van et al. (2015) allocated the FLC to control the pitch angle of a 2 MW wind turbine. The FLC compensated nonlinear characteristics of the system and its effectiveness on the speed range results. Parvathy and Gopinath (2016) comprehended the activity in the smallest change of pitch angle on the losses in the input energy. The proposed design focuses on the input variables for the FLC to drive a 1.5 MW wind turbine generator.
As the pattern of interval fuzzy type two controllers, Anil Naik (2022) implemented an interval type-2 fuzzy control for reducing the model vagueness and unreliability of information during the various disturbances in the wind speed. The simulation results have been done by real time digital simulations of a typical wind power system and hardware in loop configuration targets. Zouggar et al. (2019) applied the Fuzzy Type-2 Control for achieving the suitable regulation of active and reactive power using MATLAB/Simulink. The sliding mode rotor reduced the chattering phenomenon and improved the speed change monitoring of the wind. Hemeyine et al. (2021) realized that the using of FLC type-2 had better robustness and management capability compared to FLC type-1.
Neural network
The greatest challenge in AI is the human thinking mechanism simulation. The neural network is the first successful attempt inspired by brain neurons and their distribution and connections (Bao et al., 2018; Beniysa et al., 2022; Chen et al., 2021; Han et al., 2017, 2018; Jafarnejadsani et al., 2013; Kodama et al., 2000; Liu et al., 2021; Liu and Yue, 2011; Raya-Armenta et al., 2018; Ren et al., 2020; Ro and Choi, 2005; Roh, 2022; Saenz-Aguirre et al., 2020; Sahib and Nayl, 2019; Sedighizadeh and Rezazadeh, 2008; Sierra-García and Santos, 2020). Starting from simple logic equations, neural learning was developed to reach for a deep learning (DL) to solve the high complex problems and systems. Figure 7 shows the input, output, and hidden layers, which represent the fundamental basis for the idea of the NNs. Through the NNs, a considerable of contributions have appeared in a highly complex wind turbine system due to development in the network configuration.
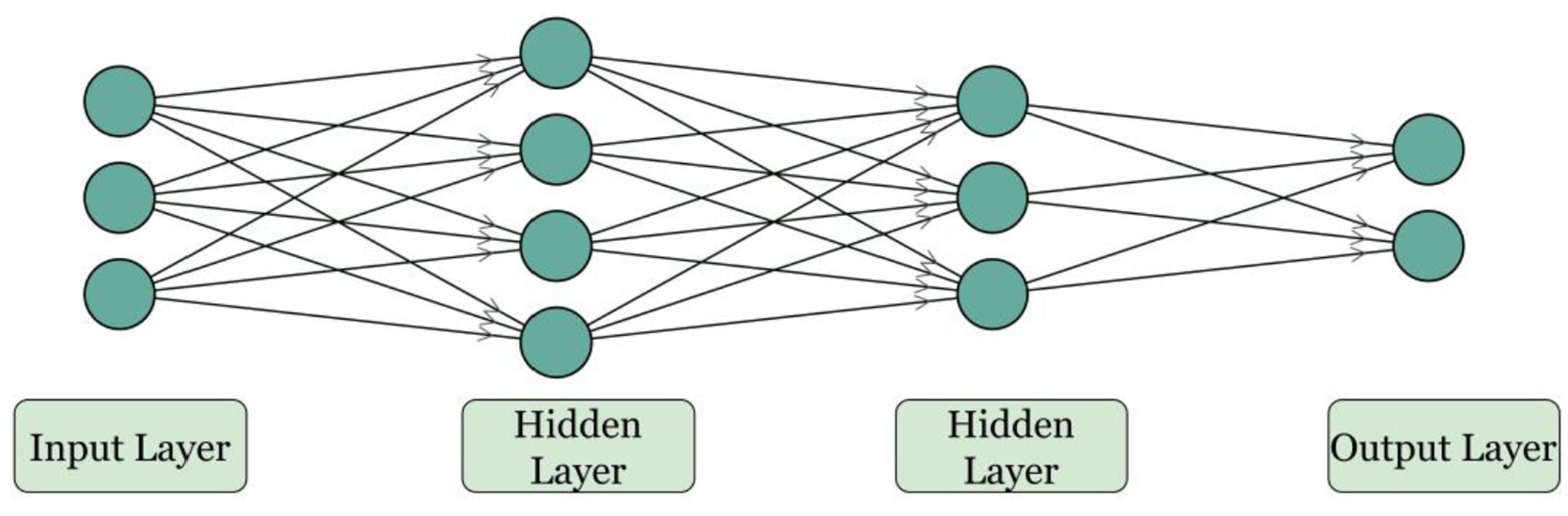
Neural network configuration.
For epitome, Jafarnejadsani et al. (2013) used Lyapunov stability analysis to performance estimation for the NN that simulated to get the control approximation of wind turbines. Firstly, the suggested algorithm was tested with an approximated mathematical model for the wind turbine. Secondly, the system was validated by simulation studies on a 5 MW wind turbine simulator. Sierra-García and Santos (2020) tried a radial basis function type of neural learning to balance the output and the desired power. The input data of the machine learning is the error integral, while the decision was the values of the parameters. Ren et al. (2020) proved the effectiveness of the back-propagation of the NN to organize the PID pitch wind turbine controller. The weighting coefficients were corrected automatically after each iteration by the action of the speed rotor error. Using MATLAB, the result of the NN learning was better in disturbance rejection and load observing.
Robust non-intelligent controller
Due to the drawbacks of design-depending on controllers by linearizing the system, classical controllers will not work satisfactorily and effectively due to linear control rules (Pourseif and Afzalian, 2017; Rajendran and Jena, 2014). So, there are possibilities to create robust controllers with the ability to work with nonlinearities and parameter uncertainties. Accordingly, the engineering ideas came to the light through various robust control methods for controlling the wind turbine speed (Abdullah and Fekih, 2013; Abolvafaei and Ganjefar, 2021; Aghaeinezhad et al., 2021; Benbouhenni et al., 2022b; Ben Zarouala and El Mjabber, 2017a, 2017b; Huang et al., 2022; Jing et al., 2017; Karami-Mollaee, 2021; Magar et al., 2015; Mérida et al., 2014; Nguyen and Lee, 2020; Ossmann et al., 2017; Rajendran and Jena, 2014b, 2015; Ren et al., 2016; Roh et al., 2022; Ruz et al., 2020; Saravanakumar and Jain, 2018; Saravanakumar and Jena, 2015; Slimane et al., 2020; Talebi and Ganjefar, 2018; Wang and Liu, 2015; Xiong et al., 2019; Xu, 2013; Zaafouri et al., 2018; Zargham and Mazinan, 2019; Zou et al., 2022). In this paper, we classified any robust control methods that does not use AI parameter optimization, fuzzy logic, or neural network learning in the robust-non Intelligent controller framework, for example, Fractional-order (FO) PID, Reduction techniques (RT), sliding mode control (SMC), and their combination controllers.
As a pattern, Ren et al. (2016) modified the PI pitch angle controller using nonlinear PI parameters set instead of constant parameters. The controller supposed an extended-order case and perturbation damper to determine and compensate for the unsettled nonlinearities and disturbances. Rajendran and Jena (2014b) divided the wind turbine PI system into three regions and suggested a region step between the pitch control and output power. The dynamic performances (Fatigue, Aerodynamics, Structures, and Turbulence) were the validation tendency of the simulation. Ruz et al. (2020) studied five variable gain-scheduling for estimating the improvement in the transition region. The small size of a wind turbine was giving an acceptable performance power tracking during the experiments, especially in regions 2 and 5. Ben Zarouala and El Mjabber (2017a) developed a flexible four-degree-freedom electromechanical model using the Integral Sliding control. The stability of the system has been calculated by the Lyapunov estimation. Abdullah and Fekih (2013) suggested that, the feed-forward path organized the data for the desired power generation, wind velocity, and turbine speed to estimate the pitch angle. The PI parameters were set to reduce changes in the tip speed ratio; that led to maximizing the power generation. Mérida et al. (2014) proposed two stages of controllers, the first stage was a tracking control system that ensured the required rotor angular velocity. The second stage applied the maximum power point tracking method while a non-homogeneous semi-continuous higher-order sliding mode was used to ensure the power tracking.
State of art dissection
Based on the performance of different wind turbine controller concepts and by comparing their benefits and drawbacks; it seems that the wind control system is mostly solved by conventional or intelligent methods, which are explored in tens of studies. First of all, the robust non-intelligent controllers (sliding model, fractional order, reduction techniques) have the maximum percentage of overall methods. The basic optimization intelligent methods are the most commonly utilized algorithms by virtue of their good synthesis and low complexity in the parameter setting in the last 15 years as shown in Figure 8. Additionally, the FLC was the highest intelligent controller used in the same period. Table 1 shows the sub-methods used in the 194 study papers in the last 15 years on wind turbine energy.
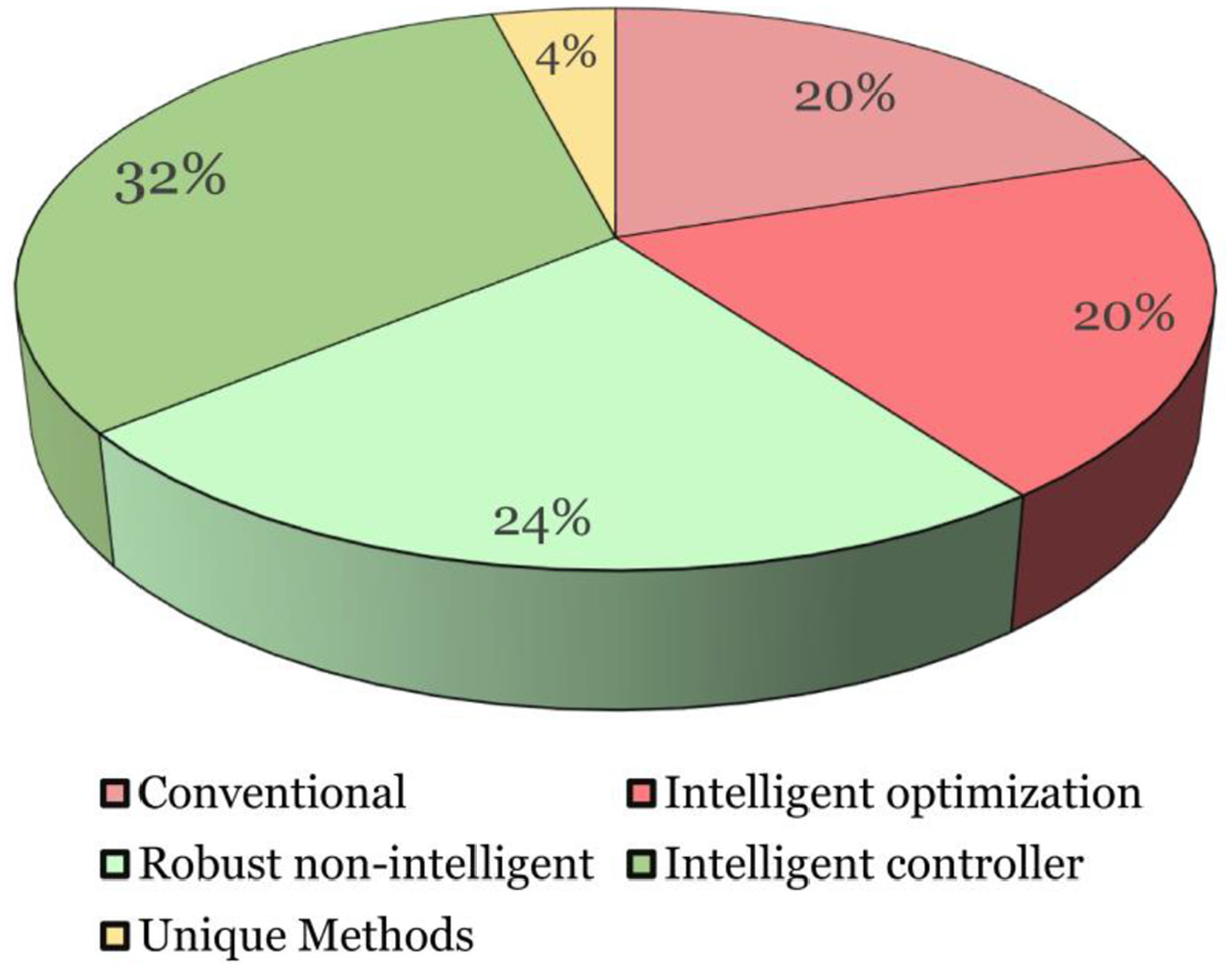
Percentage number of controllers’ types.
Total number of control methods.

Proper control is necessary for wind energy as a consequence of its demand and the increase in all industrial activities. Also, the renewable energy activities parallel with demand growth contribute toward a greater percentage in penetration into the energy mix between conventional and renewable energy. The study of characteristics of each controlling type allows for great forecasting, planning, and control. The characteristics of the most common controllers that used in wind systems are as shown in Table 2.
Advantages and disadvantages of different wind turbine controllers.

Despite the multitude of controller strategies, tasks research on wind turbine controllers still requiring for increasing the efficiency and the wind range of speed actuating. The future recommendations can be summarized as: -
The lowest complex controllers are the conventional controllers, but unfortunately, they have the lowest efficiency due to their low flexibility. Although still there are several methods that have not been examined yet in wind turbine systems, for example, Garra Rufa optimization (GRO) and elephant herding optimization (EHA).
It is recommended to select several optimization algorithms in wind turbine control to obtain the best efficiency. In many issues, there is no substantial difference between various algorithms’ performances.
A stable selection of the parameters of the optimization techniques (basic or modified) plays a master role in the wind turbine system capacity and stability. Therefore, the selection of input range, output power expecting, and algorithm parameters deserves more effort as a result of the importance of wind energy to the environment and the economy.
The hybrid controllers’ local and global optimization control objectives are giving the nearest solution to the exact one in case of the best selection of the algorithm parameters.
Intelligent controllers such as the fuzzy logic type-1 and type-2 controllers are recommended because of the high slid effect on the wind system but that needs good choice for the number and shape of the memberships and the appropriate rules.
The modification algorithms are the minimum methods that are applied in wind turbine applications. Furthermore, there are many modification algorithms that were introduced by the scientist, such as Segmentation Particle Swarm Optimization (Se-PSO), and improved gray wolf’s optimization (IGWO) which are not applied yet in wind controllers are worthwhile to apply in such a topic.
Conclusion
The motivation behind this review came from the need for a comprehensive overview of the present and future challenges of controlling the speed of wind turbines. Efficient and accurate controllers are essential to complete the task of any kind of wind turbine system for all the speed levels. Since such controller’s issues are generally highly complex, the traditional parameters scheduling techniques are considered inadequate and may lead to work in very low efficiency. In this paper, the controllers that are used to control the wind turbine system are classified into two main types. Each of the two types is briefly discussed and some examples of their application have been illustrated. In the denouement, the controllers are well characterized, and future suggestions have been made according to their corresponding advantages and disadvantages.
Footnotes
Appendix
Author contributions
All the authors contributed equally to this work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
The data are available from the corresponding author upon request.