
Abstract
Wind energy is a popular green source of energy. Like other countries, Bangladesh is also in a process of incorporating wind turbine generator (WTG) into its existing power system. Out of several locations, Cox’s Bazar has the great potential to adopt WTG. The location has every suitability to be selected for offshore WTG farm. From technical perspective, power coefficient plays a significant role in determining the power output. Against variables, maximum power coefficient (Cp) is desired to extract the maximum power from the system. Tip speed ratio (TSR) and pitch angle are the common parameters to be controlled for maximum power point tracking (MPPT). Conventionally, the Proportional - Integral - Derivative (PID) controller is used but they have their limitations against high nonlinearity caused by wind turbine aerodynamics. This paper proposes three types of controllers: Proportional controller (PI), artificial neural network (ANN), and fuzzy logic controllers. The controller is applied to both TSR and pitch angle control. Pitch angle is controlled to avoid the extreme wind gusts. All the simulation works are carried out in MATLAB and Simulink. This paper also analyzes the technical feasibility of the Cox’s Bazar location for offshore WTG.
Introduction
Only 3.69% of power generator installed capacity depends on renewable energy (RE) where wind-based energy consumption is 1.5% only. Most of the wind farms are located on the south part of Bangladesh with 44.53% and 24.36% of installation capacity depends of gas and heavy fuel oil (Bangladesh Power Development Board BPDB, 2024). The sustainable development objectives’ Goals 7 (Affordable and Clean Energy) and 13 (Climate Actions) both condemn excessive fossil fuel consumption. In addition, Bangladesh’s major fossil fuel resource, natural gas, will run out by 2028. So, it is the high time to incorporate more wind farm to the grid. Cox’s Bazar is a promising area both for on-shore and off-shore wind farm. The average wind speed at 10 m height is 3 ms−1 (Khan et al., 2004). In Mazumder and Gupta (2012), the authors found a huge possibility of wind energy extraction in Chittagong division where Cox’s Bazar is located. In Mukut et al. (2008), particularly the coastal belt of Bangladesh is studied which also shows a great possibility of wind energy. However, the survey conducted by USAID and NREL together in 2018 produced the most optimistic results for wind energy possibilities. According to their research, regions larger than 20,000 km2 have the potential to collect wind energy with a 30 GW capacity (Jacobson et al., 2018). There are some particular locations of Cox’s Bazar where the wind speed is higher than the average wind speed. Moreover, the offshore locations have a great feasibility to allocate offshore wind farm since the bathymetry is suitable to hold turbine structure (Islam et al., 2020; Rahman et al., 2019; Saha et al., 2020). To extract the maximum power from turbine maximum power point tracking is very vital. It enables variable speed wind turbine. Variable speed wind turbine enhances the power quality, energy capability and efficiency (Gao et al., 2019; Mohanty et al., 2015). Numerous techniques, including Tip Speed Ratio Control (TSR), Optimal Torque Control (OT), Power Signal Feedback Control (PSF), Perturbation and Observation Control (P&O), and Hill-climb Searching Method (HCS), have been reported in the literature (Abdullah et al., 2012; Singh and Singh, 2020). In these strategies the main limitation was poor MPPT tracking due to frequent wind variations. The Tip Speed Ratio (TSR) algorithm is a straightforward technique; however, it needs to know the wind speed. Although wind speed measurements are not necessary for the Optimal Torque (OT) and Power Signal Feedback (PSF) algorithms, they nevertheless have a significant drawback: they need the system’s characteristic curve, which is difficult to collect and depends on system factors. Perturbation and Observation (P&O) technique, commonly known as the Hill Climbing Search (HCS) algorithm, is a quick and effective MPPT approach that is not reliant on system characteristics and does not need wind speed monitoring. However, with this procedure, choosing the proper step size is a difficult problem. Due to simplicity and the fact that the linear control theory is well established, traditional PI controllers are frequently employed in WECSs for speed control (Munteanu and Marinescu, 2012). These controllers do, however, have several significant issues. They move slowly, especially when their reference is changing quickly. It is highly challenging to change their proportional and integral gains. Another issue is when they overshoot in their response. Conventional PI and PID controllers have the drawback of being unable to regulate some complicated processes for highly nonlinear systems in a realistic manner (Farag et al., 2019). Fuzzy logic and neural network approaches are among those that have been extensively expanded for MPPT methods (Aissaoui et al., 2019). The advantages of fuzzy logic control include quick convergence, parameter insensibility, and acceptance of erroneous and noisy signals. One of the best and most dependable soft computing methods for MPPT applications is FLC. The FLC’s capacity to swiftly adjust the controller settings in response to system dynamics without using approximated parameters is considered to be its key benefit (Mohanty and Pati, 2019; Tang et al., 2017). Moreover, FLC can manage imprecise or uncertain input data and can adapt to changing system dynamics, making it a viable soft computing solution for MPPT applications. Many researchers have employed FLC for MPPT applications in WECSs with success. In Ashouri and Vahidi (2019), for instance, the authors proposed a fuzzy logic-based control system for a wind turbine in order to maximize power extraction. In terms of response time and tracking accuracy, the results indicated that the suggested controller outperformed conventional PI controllers. Similarly, neural network-based controllers have shown potential in MPPT applications for WECSs (Liu and Zhu, 2019; Ma et al., 2021). These controllers are constructed utilizing artificial neural networks that can discover the ideal control method by analyzing massive volumes of input data. Neural networks are ideal for MPPT applications in WECSs because they can handle highly nonlinear systems and adapt to changing system conditions.
Several types of researches have shown the usefulness of neural network-based controllers in WECS. For instance, in Azar et al., (2020) and Lee and Kim (2018), the authors developed a neural network-based controller for a wind turbine in order to harvest the maximum amount of power. In terms of power extraction efficiency, the proposed controller beat conventional PI controllers, according to the results. In conclusion, both FLC and neural network-based controllers offer a number of benefits for MPPT applications in WECSs, including rapid convergence, parameter insensitivity, and the capacity to manage highly nonlinear systems. These improved control techniques have demonstrated encouraging results in various investigations and offer a viable solution to the limitations of classic controllers in WECSs. The author in the reference (Sharma and Sood, 2021; Sharma et al., 2022) reported a green microgrid using renewable energy sources including wind, solar, hydro, biomass in combination with batteries and the pumped storage. According to the author of the reference (Sharma and Raj Sood, 2022), the known renewable energy fraction is used to establish an ideal solution for the use of several variations of available renewable energy sources in a microgrid network. This article examines the advantages of solar chargers integrated with maximum power point tracking (MPPT) solar charge controllers, emphasizing their combined ability to maximize energy conversion and storage (Pulikkottil et al., 2024). This paper introduces a novel adaptive control methodology for improving MPPT performance, reducing system control complexity and effectively managing uncertainties and interruptions in the environment and PV system (Manna et al., 2023). In Belkhiri et al. (2023), Hussaian Basha et al. (2024), Manna et al., (2023), and Thakur et al. (2024), multiple hybrid optimization controllers are investigated for tracking the operating power point of the PV under various partial shading scenarios. The studied hybrid optimization MPPT methods are compared in terms of MPP oscillations, output power extraction, MPP settling time, PV modeling dependency, converter operating duty value, MPPT error finding accuracy, algorithm complexity, tracking speed, periodic tuning required, and number of sensing parameters used.
Wind energy potential in Cox’s Bazar
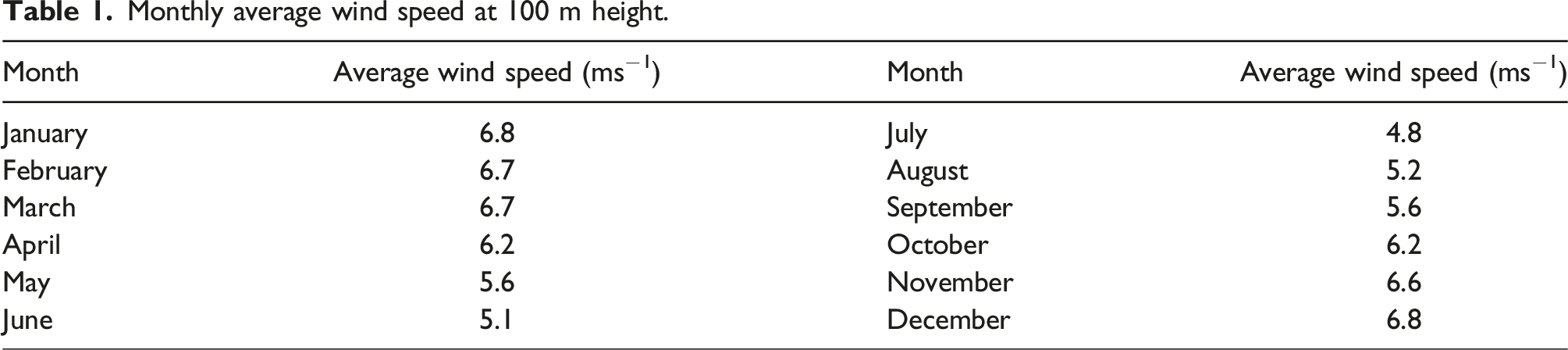
Monthly average wind speed at 100 m height.
The proposed location for WTG is in 21.42034 longitude, 91.95117 latitude corresponding to a location in the Cox’s Bazar district of Bangladesh, which is located on the southeastern coast of the country. The probable density function of the wind at 150 m height is provided in Figure 1(a). The figure shows that 7 ms−1 is with the most probability. (a) Probable density function of the wind; (b) ICOADS based NCEP2 wind field of Bay of Bengal area.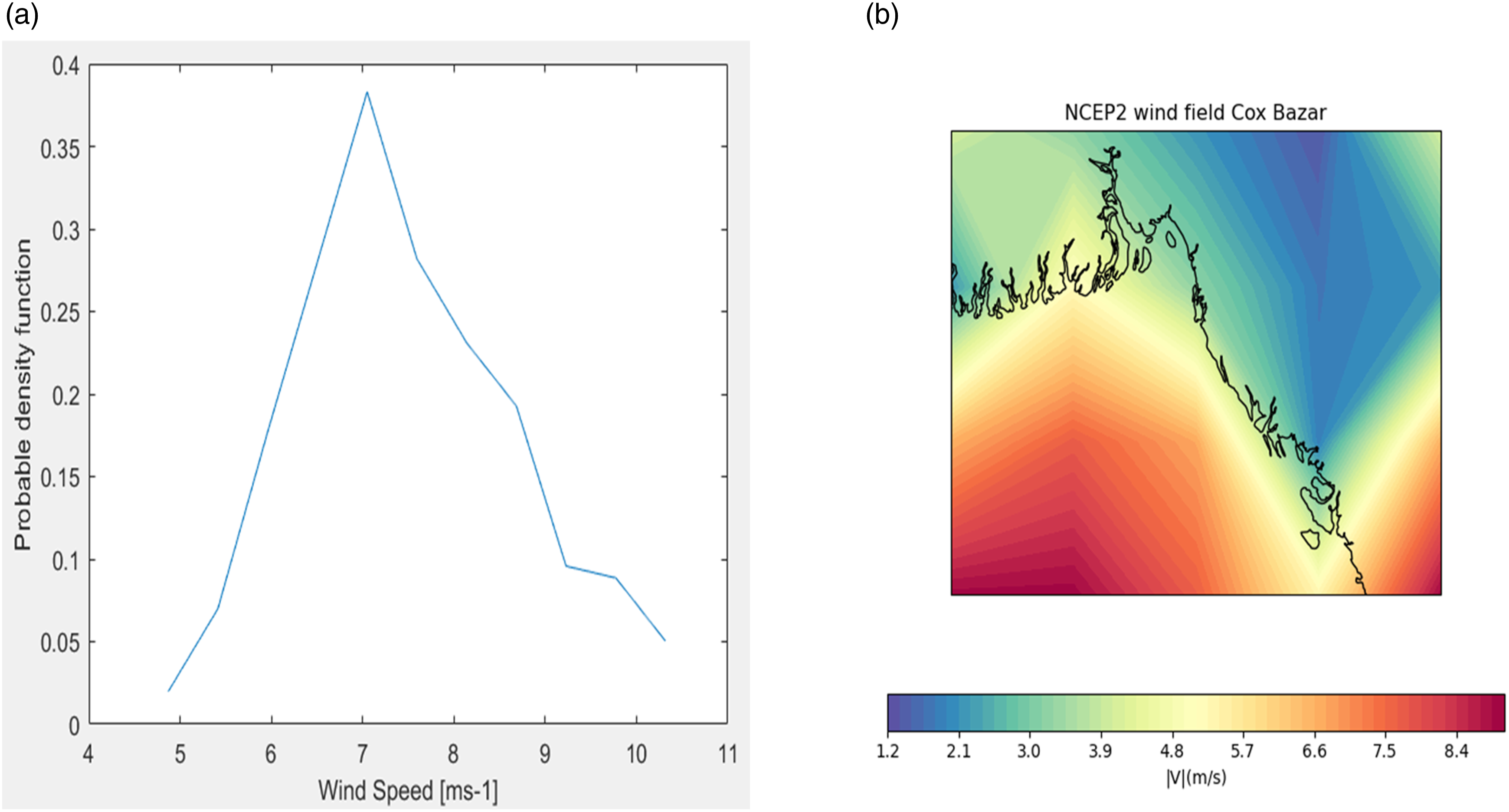
Figure 1(b) illustrates the atmospheric reanalysis produced by the National Centers for Environmental Prediction (NCEP)-based wind speed scenario at 10 m height. It shows around 4.2 ms−1 wind speed at selected location of the year 2018–2022. The bathymetry of this area shows that the depth is not more than 20 m maximum (Sustainable and Renewable Energy Development Authority, 2015). The underwater is sandy and rocky type. Depending on the exact features of the seabed and the design of the turbine, there are many types of foundation alternatives that may be viable for placing wind turbines in sandy and rocky underwater areas. With a pile driver, a single steel pipe may be inserted into the seafloor to create a monopile foundation. Because they are very easy to build and may be utilized in water depths up to around 50 m, monopiles are frequently used in rocky and sandy settings (Global Wind Atlas, 2023). A suction bucket foundation is an additional choice. This foundation is attached to the seabed using a vacuum created by inserting a sizable steel cylinder into the seabed and then drawing the cylinder out of the water. This kind of foundation might not work well on rocky seabed but can work well in sandy and clay soils.
The geographical location for the wind power plant is shown in Figure 2(a). The wind speed at 150 m hub height is demonstrated in Figure 2(b). The roughness of the surface is very small too at the selected location. It is 0.0002 as the location is just at offshore. (a) Selected location for WTG (b) Wind speed at 150 m hub height.
MPPT technique
The availability of changeable winds is the main issue with wind energy. The amount of energy produced by wind power systems depends on wind speed. The academic community has a difficulty in figuring out how to maximize the power production from wind energy projects. A research technique is one of the typical Maximum Power Point Tracking (MPPT) Controls. While producing energy, a method known as MPPT is employed to maximize power production. Just 59% of the wind’s available energy is extracted by the WT by Betz limit. Therefore, the power present in the air is given as in Equation (1),
The density of air is represented by ρ, the area swept by the blades of the turbines is represented by A in m2, and the speed of the wind in (m/s) is represented by V. The tip speed ratio (TSR, λ) and pitch angle (β) represented by (1) is given as in Equation (2),


Monitoring and increasing the power from the wind energy conversion system is made possible by MPPT algorithms (WECS) (Yang et al., 2017). There are several accessible algorithms. Based on the requirement of speed sensors for wind speed measurement, the MPPT approaches used to estimate wind speed are split into techniques that need them and techniques that do not. The MPPT algorithms use speed sensors to determine wind speed and use sensors like anemometers to measure wind speed (Burton et al., 2021). The MPPT algorithms perturb and observe (P&O), optimal relation based (ORB), and incremental conductance (INC) are not dependent on wind speed sensors (Liu et al., 2013); however, the MPPT algorithms tip speed ratio (TSR) and power signal flow (PSF) are dependent. Given that WECS are produced by merging two or more traditional techniques, there are a number of hybrid strategies that may be used to overcome the drawbacks of the conventional algorithms mentioned above and increase the amount of data that can be extracted from WECS. Smart MPPT algorithms based on soft computing techniques like neural networks (NN) and fuzzy logic controllers are also reported in the literature. There are several hybrid algorithms available to get the maximum power out of WECS. These methods combine conventional MPPT algorithms with optimization algorithms. In the TSR MPPT algorithm technique, the rotor and wind speeds are evaluated to provide an ideal reference speed for the rotor (Wref). By accounting for the system features, the TSR approach calculates the best power extraction. Due to its advantages, such as simplicity and speed of reaction, the TSR MPPT algorithm is used to regulate the optimal rotor speed in varying environmental conditions. To maintain the rated power before cut-off speed, the pitch angle control is vital. The usual TSR method with pitch angle control for MPPT is seen in Figure 3. In this case, the wind speed is used to regulate the turbine speed by electromagnetic torque, and the location of the highest power coefficient point is constantly searched. If the wind speed goes beyond the rated power of the turbine, the pitch angle comes into action to maintain the rated power at variable speed until cut-off. MPPT using TSR and Pitch angle control system.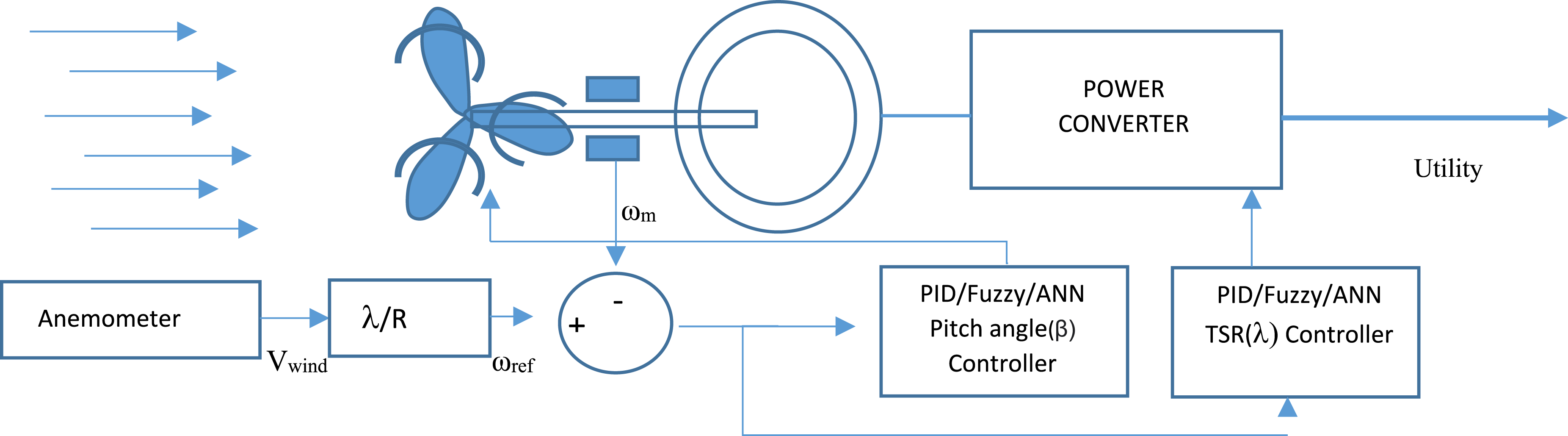
Fuzzy logic control (FLC)
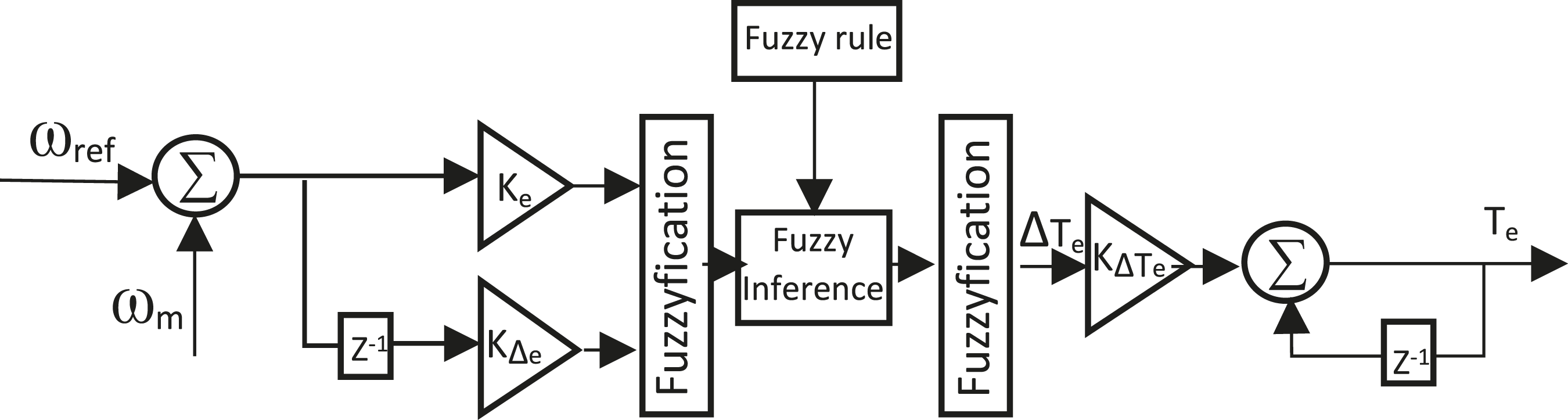
The fuzzy logic controller’s ability to handle general inputs, nonlinearity, and quick changes makes it effective. FLC primarily The FLC is primarily divided into three phases: fuzzification, fuzzy inference engine (whose rule basis table is established by earlier instructions), and defuzzification. The fuzzy rules are constructed using the expert knowledge gleaned from an examination of the system’s performance over time. This idea offers better features regarding quick convergence, especially at transient states, and is highly helpful for managing the nonlinearity and uncertainty of the system. Hence, FLC-based MPPT technology is regarded as a powerful and promising algorithm, particularly with rapid variations in wind speed (Li et al., 2015; Toan and Duc, 2017). The generator speed error (e) and its variation (∆e), as shown in Figure 4, are the input values for FLC. The unit time delay is represented by the symbol “Z−1”. The change in electromagnetic torque (∆Te) is the FLC’s output. Scaling factors Ke, K∆e, and K∆Te equalize the input and output. Equations (5) and (6) express the inputs of FLC. MPPT Technique using FLC.

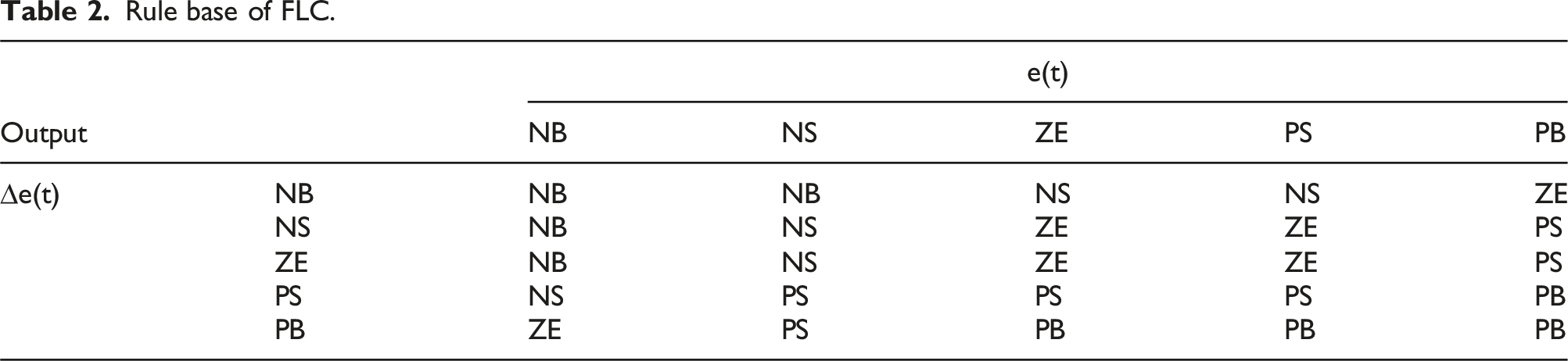
The fuzzy set notation of the controller architecture is utilized to represent each input/output variable using linguistic variables. Examples include the notations for speed error (e), speed error variation (∆e), and change in electromagnetic torque (∆Te). The triangle membership function, as shown in Figure 5, distinguishes between Positive Big (PB), Positive Small (PS), Zero (ZE), and Negative Big (NB), Negative Small (NS), and Positive Big (PB). The triangular membership structure is preferred over the Gaussian membership function because to its quicker processing time. Scaling factors are used to conveniently normalize the input and output in order to enhance the controller’s dynamic and transit performance. A collection of IF-THEN rules establish a control method after defining the fuzzy sets (Gupta et al., 2024). These heuristic rules are written in the fuzzy domain as indicated in Table 1 and are based on the author’s expert control knowledge. For instance, if the electromagnetic torque change (“∆Te”) is NB if the error (“e”) and derivative (“∆e”) are both NB. The output linguistic variables must be converted to precise values in the next phase in order to regulate the electromagnetic torque. Input and output of the membership function.
Artificial neural network (ANN)
There are several algorithms of ANN but Levenberg–Marquardt (LM) method as shown in Figure 6, is a popular optimization approach for training ANNs, especially for nonlinear regression issues. It combines the advantages of the steepest descent approach with the Gauss–Newton method, and it is effective at handling big datasets and fast convergent to a solution. An artificial neural network (ANN) based on the Levenberg–Marquardt Method can monitor changes in angular speed and keep a wind turbine’s maximum tip speed ratio (TSR) constant (Khorsandi et al., 2018; Mohammed et al., 2017). A sensor is used to measure the angular speed of the turbine, and the TSR of the wind turbine is calculated using the measured angular speed and the current wind speed. This process entails gathering data for various wind speeds and generator speeds, building an ANN with at least one hidden layer and training it using the collected data, and using the measured angular speed and the current wind speed to determine the TSR of the wind turbine. The observed angular speed and the current wind speed are sent into the ANN as inputs to provide the best electromagnetic torque. The electromagnetic torque delivered to the turbine is then modified by a controller to meet the ideal electromagnetic torque discovered by the ANN. To keep the wind turbine’s maximum tip speed ratio while the wind speed fluctuates, this operation is constantly done. In order to reduce the contrast between the anticipated electromagnetic torque and the actual electromagnetic torque supplied to the turbine, the Levenberg–Marquardt algorithm is used to optimize the weights and biases of the ANN. This maximizes the power captured from the wind. Levenberg–Marquardt algorithm.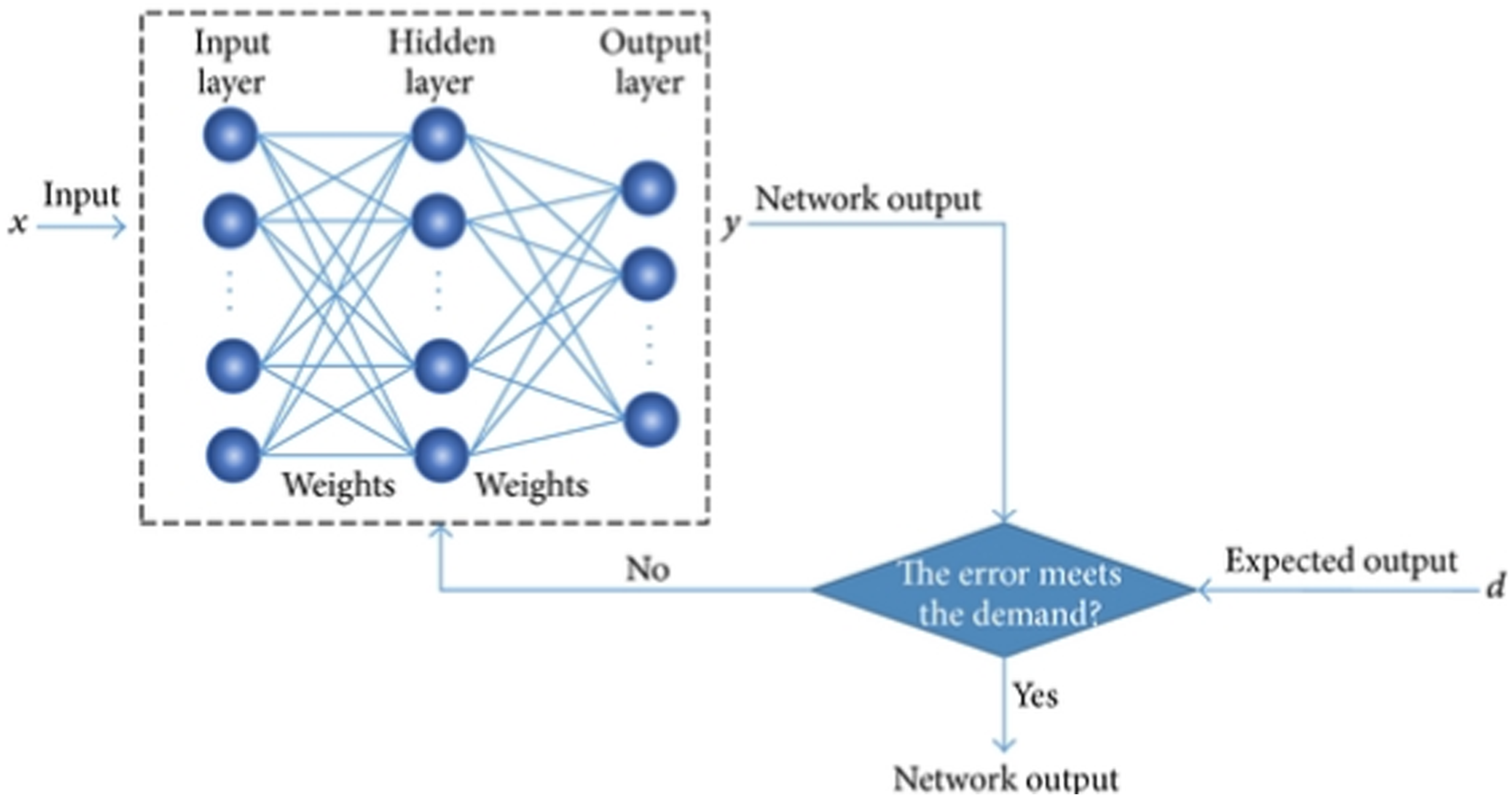
Methodology
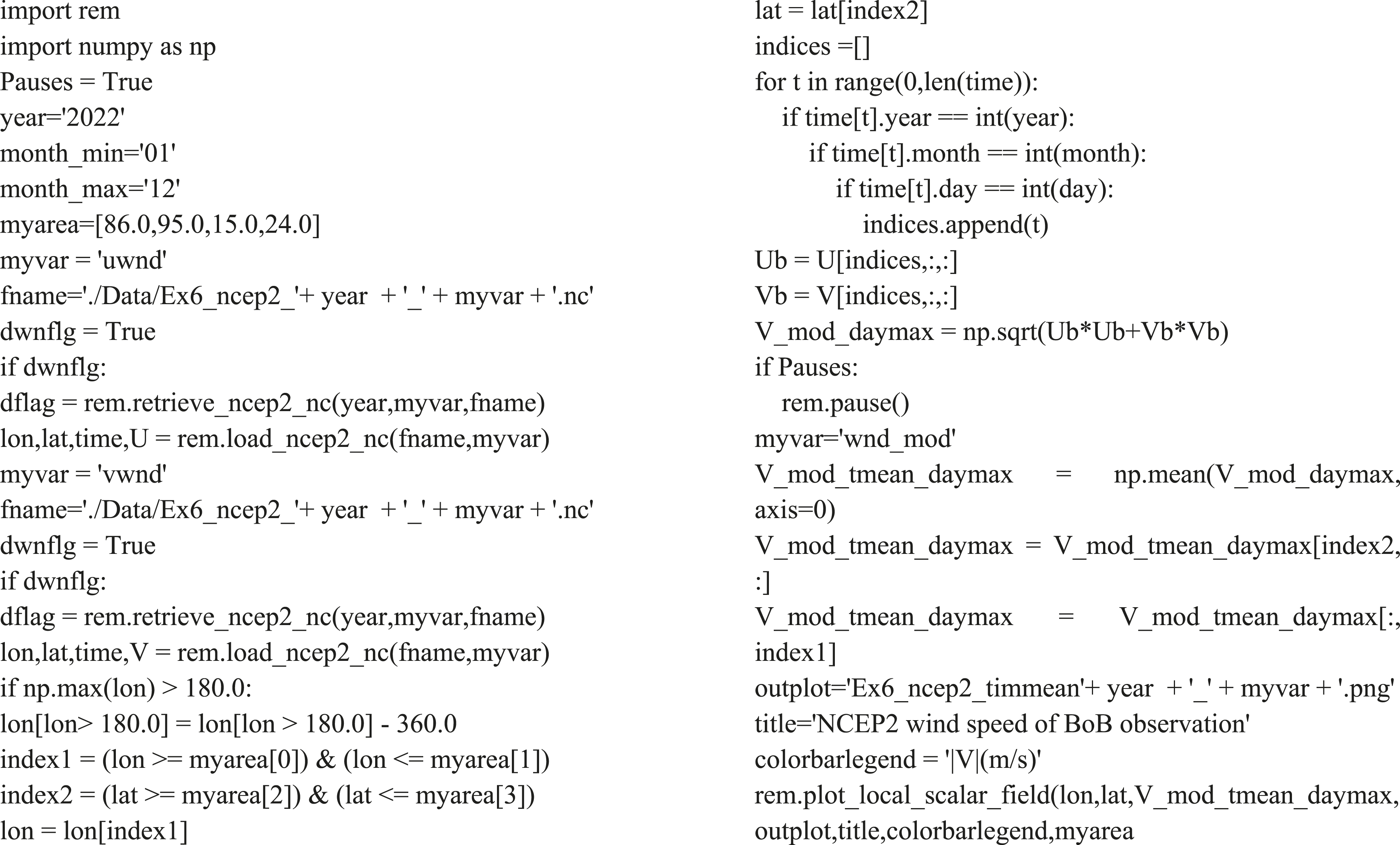
The main purpose of this present paper is to analyze the wind energy potential of a selected location of Cox’s Bazar area. The python code is used to access satellite data of that area. The National Centers for Environmental Prediction (NCEP) Global Reanalysis dataset is known as NCEP, and it is in version 2. The NCEP, a part of the National Oceanic and Atmospheric Administration (NOAA) in the United States, created the long-term, high-resolution global atmospheric and oceanic dataset. The NCEP2 dataset comprises a wide range of atmospheric and oceanic variables, such as temperature, wind, humidity, precipitation, and sea level pressure, and it spans the time period from 1979 to the present. In this paper only year 2022 is considered to analyze the wind speed of the location (Barakat and Halim, 2021; Saha et al., 2014). The python code which is used in this work is provided below.
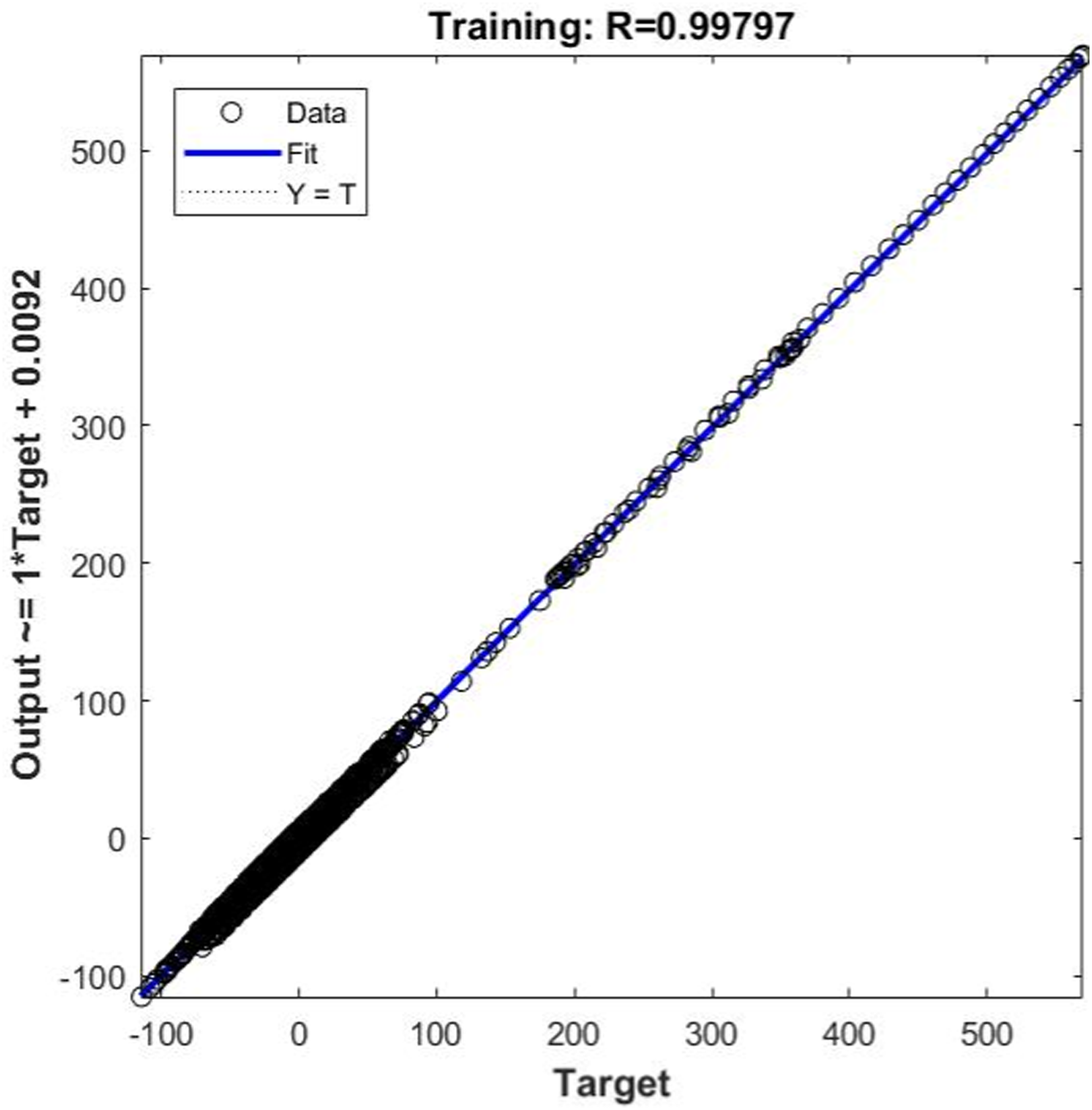
The probability density function of the wind speed is determined to design a WTG. The height is selected is 150 m as the bathymetry shows the depth is not more than 20 m and the bottom is rocky and sandy type. So, it can be fitted with monopole structure at 150 m hub height. The design parameter of the WTG is provided in appendix. Now a wind turbine is modeled using two mass modeling systems. Matlab and Simulink are used to carry out these simulations. The another purpose of this paper is to track maximum power by controlling the turbine angular speed pitch angle to withstand against gust of wind besides not exceeding rated power and controlling the turbine angular speed by applying electromagnetic torque which is voltage controlled. Three types of controllers are assigned (PI, ANN, and fuzzy) separately to control both the pitch angle and electromagnetic torque controller. The overall Simulink model is illustrated in Figure 7. The regression curve at Figure 8 depicts that the training is 99.7% successful when the ANN controller is trained. Change in wind speed is applied both in continuous and step form to show the MPPT by observing the response in power coefficient and pitch angle. Performance of each controller is carried out using Simulink and Matlab environment. Simulink model for the MPPT. Regression curve of ANN training.
Result and discussion
Figure 1(b) shows the satellite mapping of average wind speed and at your point of location in 21.42034 longitude, 91.95117 latitude, and the average wind speed is also found near 4.5 ms−1 at 10 m height. The speed at 100 m height is 6.2 ms−1. As the roughness of the surface is almost offshore, the speed at 150 m height is around 7 ms−1. The probability density function of the wind speed is shown in Figure 1(a), where it is observed that 7 ms−1 has the highest density. 10 kW of unit of each wind turbine is suitable for this wind speed at 150 m height. Two types of wind profiles, that is, step and continuous wind signals, are used to check the performance of the controller. When step signal is applied as shown in Figure 9(a), the fuzzy logic controller maintains the maximum Cp in the system in the event of wind step changes. At rated speed of 7 ms−1, the power coefficient is 0.53 for all controllers. ANN- and PI-based controllers show almost same Cp but ANN provides slightly higher Cp value than PI controller. Now the real wind signal variation of 12 s is applied as shown in Figure 9(b). Again the result in the same figure depicts that the FLC returns the maximum Cp in the system. The ANN-based controller is again higher than the PI controller in maintaining Cp value. (a) Cp curve of each controller against step; (b) Cp curve of each controller against continuous signal.
Figure 10(a) reveals the pitch angle of the turbine maintained by each controller. When the input wind speed exceeds the rated speed the pitch angle is no more 0°. FLC maintains more Cp with the least pitch angle, and it operates within 0 to 7° for the type of step input. The PI controller has the maximum pitch angle among PI, ANN, and FLC when wind changing is characterized by step input as reported in Table 2. Against realistic wind signal, the scenario of controllers is the same, and the PI controller make the largest pitch angle to maintain the output power not exceeding its rated power. (a) Pitch angle of each controller against step; (b) pitch angle each controller against continuous signal. Rule base of FLC.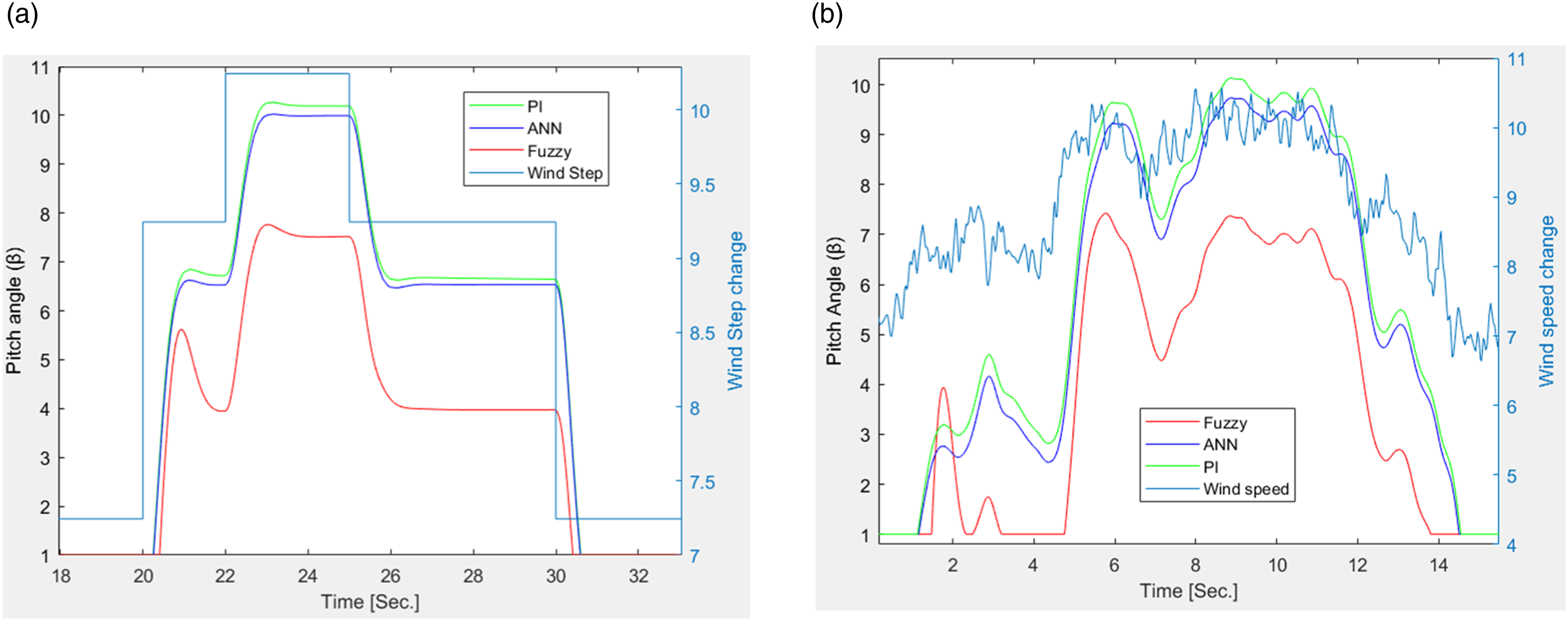
Now output power of turbine is determined against the realistic wind signal. The FLC controller provides the maximum power over the applied disturbance of continuous signal. It touches the peak of 8.7 kW when the wind speed is maximum (10.5 ms−1). Both ANN and PI controllers cannot help the system to extract more than 7.5 kW. Figure 11 shows the power output curve. The PI controller-based system gives the least power output. Power output of the turbine against realistic wind signal.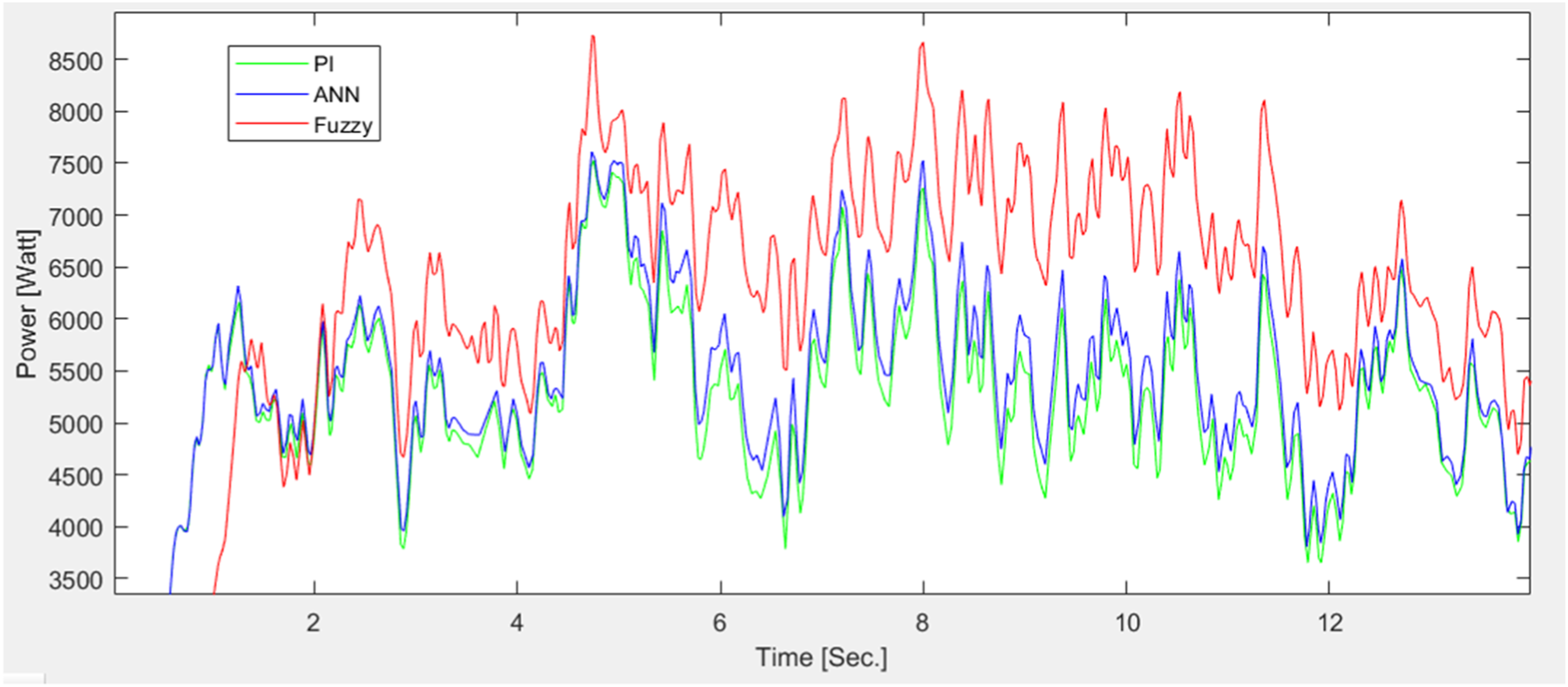
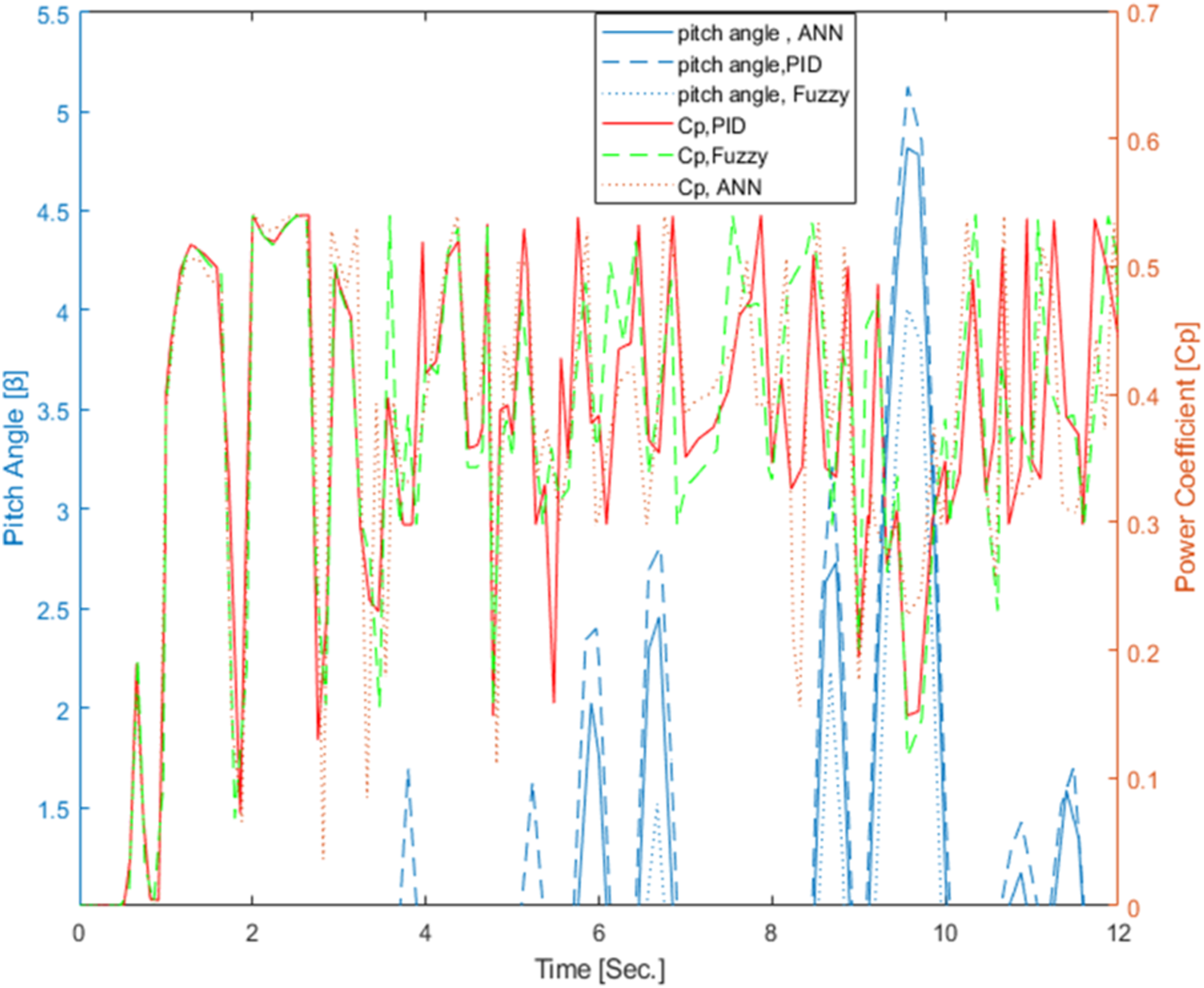
To check the effectiveness of FLC, the wind velocity is subjected to a higher rate of change. The wind has now high noises. The average velocity is 5 ms−1, with frequent peaks at 16 ms−1. With FLC, the power output is the highest followed by ANN and then PID controller. Figure 12 illustrates the result of ANN, PID, and FUZZY with wind velocity. To demonstrate the effect on pitch angle and power co-efficient in this time scale, Figure 13 can be depicted the variations. It seems that two variables are being compared over time for the different control strategies: Pitch Angle (β) and Power Coefficient (Cp). It shows that the Cp is the highest with FLC while maintaining least stress to pitch angle with only 4°. On the other hand, the ANN-based controller hits 4.8° and the PID controller reaches 5.2°. On the basis of result presented in Figure 12, a comparison study has been obtained that described in Table 3. Power output against high rate of change in wind velocity. Power co-efficient against high rate of change in wind velocity. Comparison between PID, ANN, and fuzzy.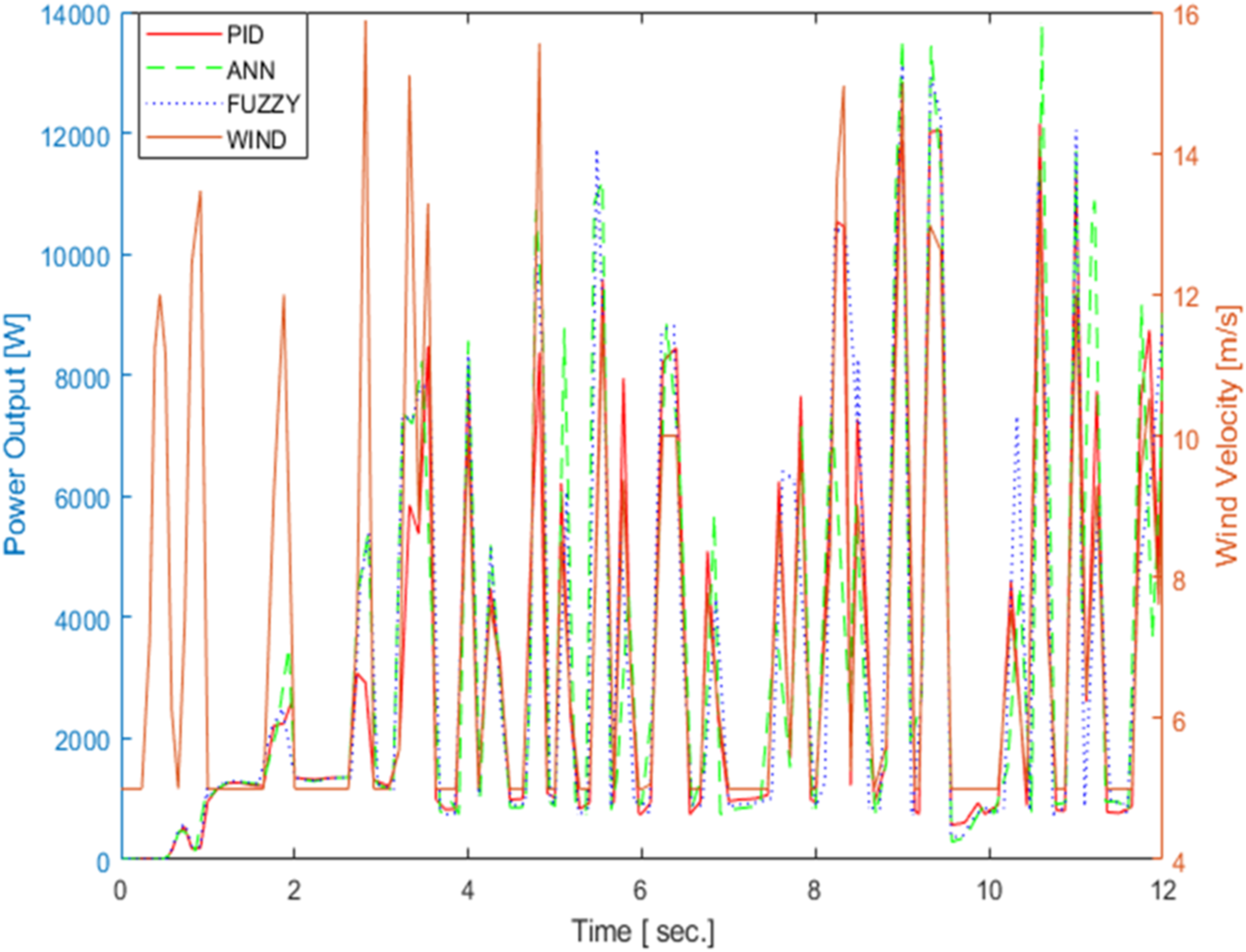

Comparison between PID, ANN and FUZZY on basis of pitch angle and Cp stability.

Conclusion
Bangladesh has incorporated only 1.5% of wind energy into its total power generation though it has potential to extract more wind energy into its power system. A potential location is selected in Cox’s Bazar which is offshore with rated speed is 7 ms−1 at 150 m height. The potential wind speed is analyzed by National Centers for Environmental Prediction and its reanalysis. MPPT is very vital to extract the maximum power from the WTG. Both pitch angle controller and TSR controller are used in this paper, as the linear PI controller has the limitation to work against frequent variation of wind speed. To be more effective against large variations of wind speed, the ANN controller is used which uses the Levenberg–Marquardt algorithm. The training was 99.8% successful as shown by the regression curve. The FLC controller is also used in this paper which uses Mamdani as a fuzzy inference system and centroid method for defuzzification. Among three controllers, FLC shows largest Cp value and power output.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.