
Abstract
This paper introduces a novel parametric model for estimating the power coefficient of stall-regulated wind turbines as a function of tip speed ratio and pitch angle. The proposed model improves upon existing polynomial, sinusoidal, and exponential formulations by incorporating the variation in drag-to-lift ratio, which significantly enhances the accuracy of power predictions. Model calibration is performed using a deterministic nonlinear least squares method to ensure robust parameter estimation. The enhanced model achieves a notable increase in predictive accuracy, with the adjusted R2 improving from 0.93 to 0.96 and the root mean square error decreasing from 0.41 kW to 0.33 kW.
Introduction
The environmental challenges of conventional power generation—namely, high CO2 emissions and complex radioactive waste management in nuclear energy—have intensified the need for cleaner energy alternatives. Renewable sources like hydro and solar power are promising but often face high costs that limit their widespread adoption. In contrast, wind power has emerged as a rapidly growing and economically viable alternative. The Global Wind Report for 2024 highlights that the wind sector achieved a record 100 GW of new onshore installations and the second-highest level of offshore wind installations at 11 GW. With global installed wind capacity now exceeding 1 TW and projections indicating it could reach 2 TW by 2030 (Council GWE, 2024), the sector’s expansion is largely driven by decreasing turbine costs and supportive government policies (Council GWE, 2020).
As the wind energy sector continues to expand, optimizing turbine efficiency becomes increasingly important to meet these ambitious targets. The power coefficient (C p ) a measure of how effectively a turbine converts wind energy into mechanical power is crucial for optimizing turbine performance and ensuring the economic viability of wind farm projects (Hmina et al., 2018).
Accurate modeling of the power coefficient is essential for efficient power regulation and maximizing energy extraction from wind turbines. While advanced methods like blade element momentum (BEM) theory (Amour and Arbaoui, 2024; Fawkes, 2023; Ouakki et al., 2023, computational fluid dynamics (CFD) (Uchida et al., 2023) and generalized dynamic wake (GDW) models offer precise evaluations (Tran et al., 2024), their high computational demands and reliance on detailed rotor geometry make them impractical for real-time applications. To address this, turbine manufacturers often provide look-up tables for C p values, which are derived from algebraic models. These tables facilitate real-time operational adjustments by offering simplified, yet effective, approximations of turbine performance (Heier, 2014).
To approximate these look-up tables in a closed form, various mathematical models have been developed, each with distinct characteristics. Polynomial functions are common but lack a consistent pattern and require restrictive limits on the tip speed ratio (λ), failing to accurately reflect real-world turbine operations. Sinusoidal functions provide consistent amplitude variations but also impose limits on λ, missing the full complexity of turbine behavior. Exponential functions offer a more accurate representation, starting at zero for a pitch angle (β) of zero, peaking, and then decreasing to zero at varying β values (Castillo et al., 2023).
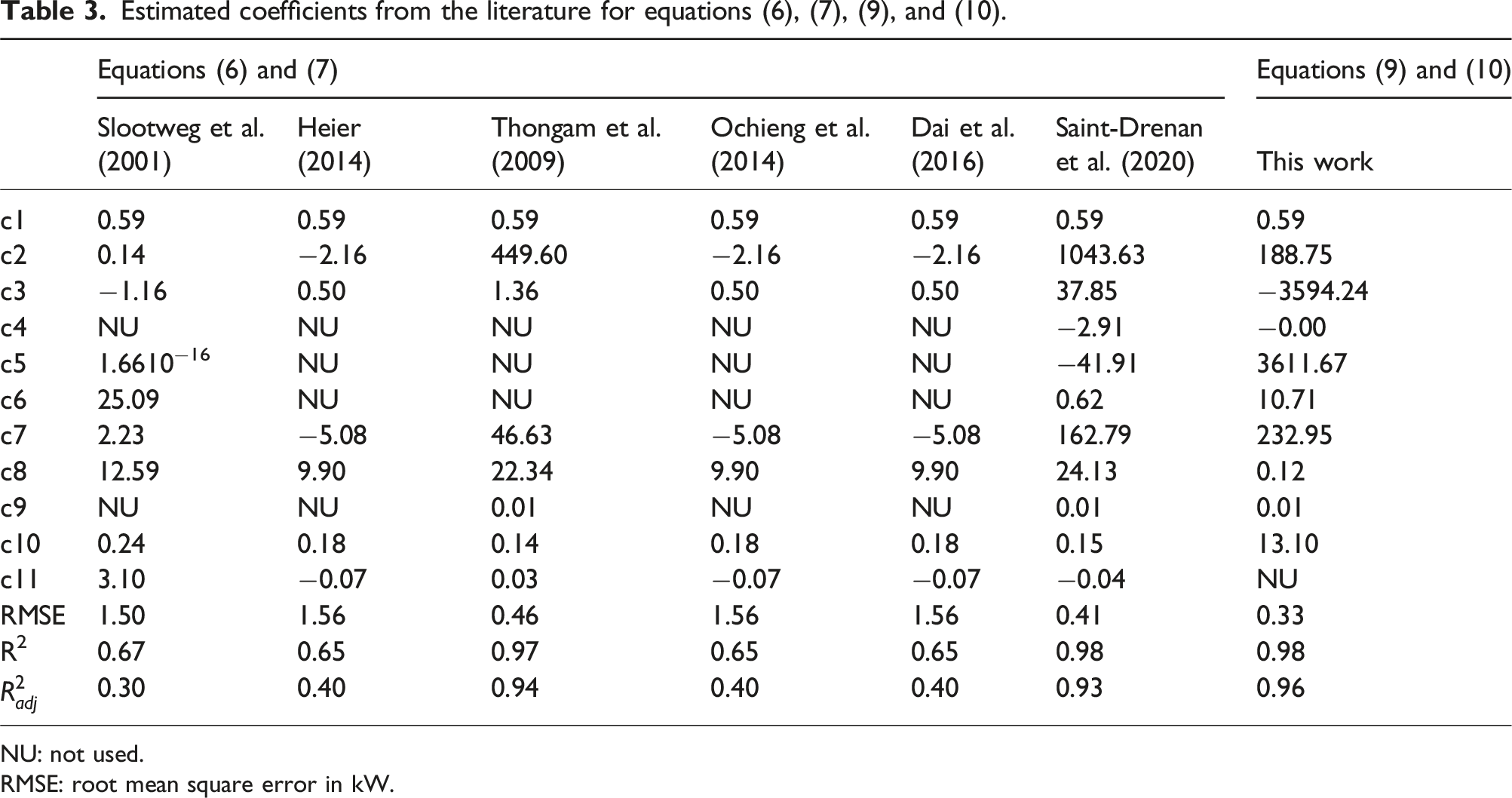
Recent research has highlighted substantial limitations in the parametric models commonly used for stall-regulated wind turbines. Specifically, the model proposed by Saint-Drenan et al., 2020, which incorporates various established parametric models (Slootweg et al., 2001; Heier, 2014; Thongam et al., 2009; De Kooning et al., 2013; Ochieng et al., 2014; Dai et al., 2016), has proven inadequate for accurately predicting the performance of stall-regulated turbines. This inadequacy persists even when advanced optimization techniques, such as Genetic Algorithms (GAs) (Amour et al., 2022), are employed.
To address these issues, our study examines the basic principles behind these models, starting with Jansen’s pioneering work (Jansen and Smulders, 1977), which developed a model for the power coefficient C p using Blade Element Momentum (BEM) theory. Building on this, (Wasynczuk et al., 1981) created a parametric model for pitch-regulated turbines that influenced the development of widely adopted exponential models (Chen et al., 2022; Fayazi et al., 2024; Zoubaa et al., 2025). However, our analysis reveals that the exclusion of drag effects, while a valid simplification for pitch-regulated turbines, significantly impairs the model’s accuracy for stall-regulated turbines, particularly in capturing their post-stall behavior.
Our proposed general parametric model establishes a direct relationship between the C d /C l ratio and the surfaces of λ and β, incorporating advanced BEM theory from CCBlade (Ning, 2013) within WISDEM and data from the NREL AMES Phase VI turbine. The three-dimensional airfoil data required for accurate CCBlade simulations was generated using the utility program FoilCheck (Jonkman, 2003), which extrapolates two-dimensional airfoil data provided by a respected Blind Comparison participant using AeroDyn aerodynamics subroutines. Post-stall effects were accounted for using the Viterna-Corrigan equations (Viterna and Corrigan, 1982), and stall delay characteristics were determined with a method similar to that described by Du and Selig, 1998.
The structure of this paper is organized as follows: the Significance and Contributions section provides an overview of the key contributions of this study. The Formulation of the Parametric Model section details the methodology used for developing the model, outlining the approaches and techniques employed. The Solution Method Using the Trust Region Reflective Algorithm from SciPy’s Least Squares section addresses the process of identifying and estimating the unknown parameters in the model. The Results and Discussions section presents the outcomes obtained from the simulations. Finally, the Conclusion section summarizes the findings and discusses their significance and implications.
Significance and contributions
This section summarizes the main scientific contributions and added value of this study. The proposed model advances current aerodynamic prediction capabilities for stall-regulated wind turbines and fills critical modeling gaps identified in the literature. (1) Overview of Evolution of Pitch-Regulated Wind Turbine Models: We provide a detailed overview of the evolution of pitch-regulated wind turbine models, from Jansen’s pioneering work (Jansen and Smulders, 1977) to modern advances. This historical perspective highlights how earlier models, such as those by (Wasynczuk et al., 1981), have influenced contemporary approaches and identifies gaps that our study aims to address. (2) Introduction of a Novel Parametric Model: We introduce a new parametric model for estimating the power coefficient (C
p
) of stall-regulated wind turbines. This model uniquely incorporates the variation in the drag-to-lift ratio (C
d
/C
l
) with the tip speed ratio (λ), addressing limitations in current models and improving prediction accuracy. (3) Application of Deterministic Least Squares (LS) Method: We employ the deterministic least squares (LS) method for robust parameter identification, ensuring reliable model calibration. Our comparative analysis demonstrates the advantages and performance of our proposed model over existing ones. (4) Integration of Advanced BEM Theory: The study incorporates advanced Blade Element Momentum (BEM) theory from CCBlade within the WISDEM framework. By using detailed three-dimensional airfoil data, the model achieves improved fidelity in aerodynamic performance representation.
Formulation of the parametric model
Evolution of pitch-regulated wind turbine models: From Jansen to modern advances
Existing models for the power coefficient (C p (λ, β)) surface generally fall into categories such as polynomial, sinusoidal, and exponential functions. This is demonstrated by Castillo et al. (2023). Exponential models are noted for their accuracy and realism. Despite this advantage, Amour et al. (2022) has shown that these models often fail to capture the full performance characteristics of stall-regulated turbines, particularly under post-stall conditions. To improve model accuracy, a deep understanding of wind turbine aerodynamics is essential.
The physical model proposed by Jansen and Smulders (1977) serves as the foundation for many subsequent models predicting power coefficients. This model, presented in equation (1), is based on the early application of Blade Element Momentum (BEM) theory, a significant advancement in the field. Although this work established a crucial framework for understanding turbine performance, it has primarily been adapted to pitch-regulated turbines.
However, the well-cited exponential parametric model is commonly used for controlling wind turbines (Chen et al., 2022; Fayazi et al., 2024; Zoubaa et al., 2025). This model is effective because it can be adjusted to match the look-up tables provided by turbine manufacturers, which are specific to each turbine type. Nonetheless, detailed derivations and explanations of this model are often lacking in the literature. By examining the foundational contributions of Jansen and Smulders (1977), we can appreciate how they have influenced the development of more refined models for pitch-regulated turbines. This also underscores the need for further refinement to address the limitations of current models, particularly for stall-regulated turbines where accurate post-stall performance prediction is critical.

Key components used in the power coefficient model (see equation (1)).

Jansen’s model (Jansen and Smulders, 1977) was the first to estimate the maximum aerodynamic power of a wind turbine. Building on this foundation, a mathematical model was developed to fit the aerodynamic behavior of the MOD-2 turbine, which uses pitch control (Wasynczuk et al., 1981). To derive a compact model usable in control and optimization, Wasynczuk et al. (1981) developed a simplified form of equation (1), based on the following assumptions:
Assumption 1: Small angle of attack
In pitch-regulated wind turbines, the blade pitch angle β is continuously adjusted to maintain a small angle of attack α, particularly in Region III where the turbine operates at rated power. Under these conditions, the aerodynamic lift-to-drag ratio C
l
/C
d
remains high, and the contribution of the drag-induced term C
d
/C
l
λ becomes negligible compared to the leading exponential term. As a result, the aerodynamic efficiency expression simplifies as follows:
Assumption 2: High tip speed ratio and small pitch angle
In Region II, where the wind speed is below rated and the turbine aims to maximize power capture, the tip speed ratio λ is typically high and the pitch angle β is set near zero. Under these conditions, the flow angle ϕ becomes small, allowing the use of the small-angle approximation Jansen (1976), 

Assumption 3: Small tip speed ratio and large pitch angle
In Region III, the turbine regulates power output by increasing the pitch angle β as wind speed exceeds rated. Since the angle of attack α is kept small via pitch control, the flow angle satisfies ϕ ≈ β, and we use the small-angle approximation:

Superposition of asymptotic expansions
To unify both asymptotic regimes, we superimpose the simplified forms of the tip-loss factor obtained in Region II and Region III, yielding a compact parametric expression for the power coefficient:
Rewriting this model in a generalized parametric form:
The parameters were identified using the least squares method to approximate the aerodynamic performance of the MOD-2 turbine. The parameters obtained are as follows: c1 = 0.5, c2 = 102.3, c3 = −0.22, c4 = −5.6, c5 = −17.38, and c6 = 1 (Wasynczuk et al., 1981).
The model was later refined by Amlang et al. (1992) and integrated into MATLAB toolboxes, gaining widespread adoption among researchers (Slootweg et al., 2001, Heier, 2014, Thongam et al., 2009, De Kooning et al., 2013, Ochieng et al., 2014). Building on the existing literature, Saint-Drenan et al. (2020) developed a general parametric model specifically designed to fit manufacturer-provided data for pitch-regulated wind turbines.

Despite its popularity and widespread use, the model’s failure to accurately represent post-stall behavior in stall-regulated turbines remains a critical limitation (Amour et al., 2022). The following section introduces our proposed parametric model, designed to address these limitations by incorporating features that better capture the aerodynamic behavior of wind turbines in the post-stall regime.
Proposed parametric model
As discussed in the previous section, current models equations (6) and (7) often assume a near-zero angle of attack (α) and overlook the significant drag effect term 16/27λC d /C l , as defined by Jansen and Smulders (1977). This omission is particularly problematic for stall-regulated turbines, where the drag effect plays a more pronounced role and is crucial for accurate modeling.
Data used to construct the new model: NREL Ames Phase VI
To address these limitations, we propose a new parametric model based on experimental data from the NREL Ames Phase VI wind turbine (Tangler and Kocurek, 2005). This turbine, operating at a constant speed of 72 r/min, is equipped with two blades in an upwind, stall-regulated configuration. It features a linear chord taper with a nonlinear twist distribution and a 3-degree tip pitch. The rotor has a radius of 5.03 m, including both blade and hub, and utilizes the S809 airfoil from root to tip (Hand et al., 2001; Jonkman, 2003).
The experimental data were collected in the NASA Ames wind tunnel, providing the basis for parameter identification in our proposed model. Figure 1 illustrates the NREL Ames wind turbine setup. Illustration of the NREL Ames Phase VI wind turbine, a stall-regulated system used for aerodynamic validation.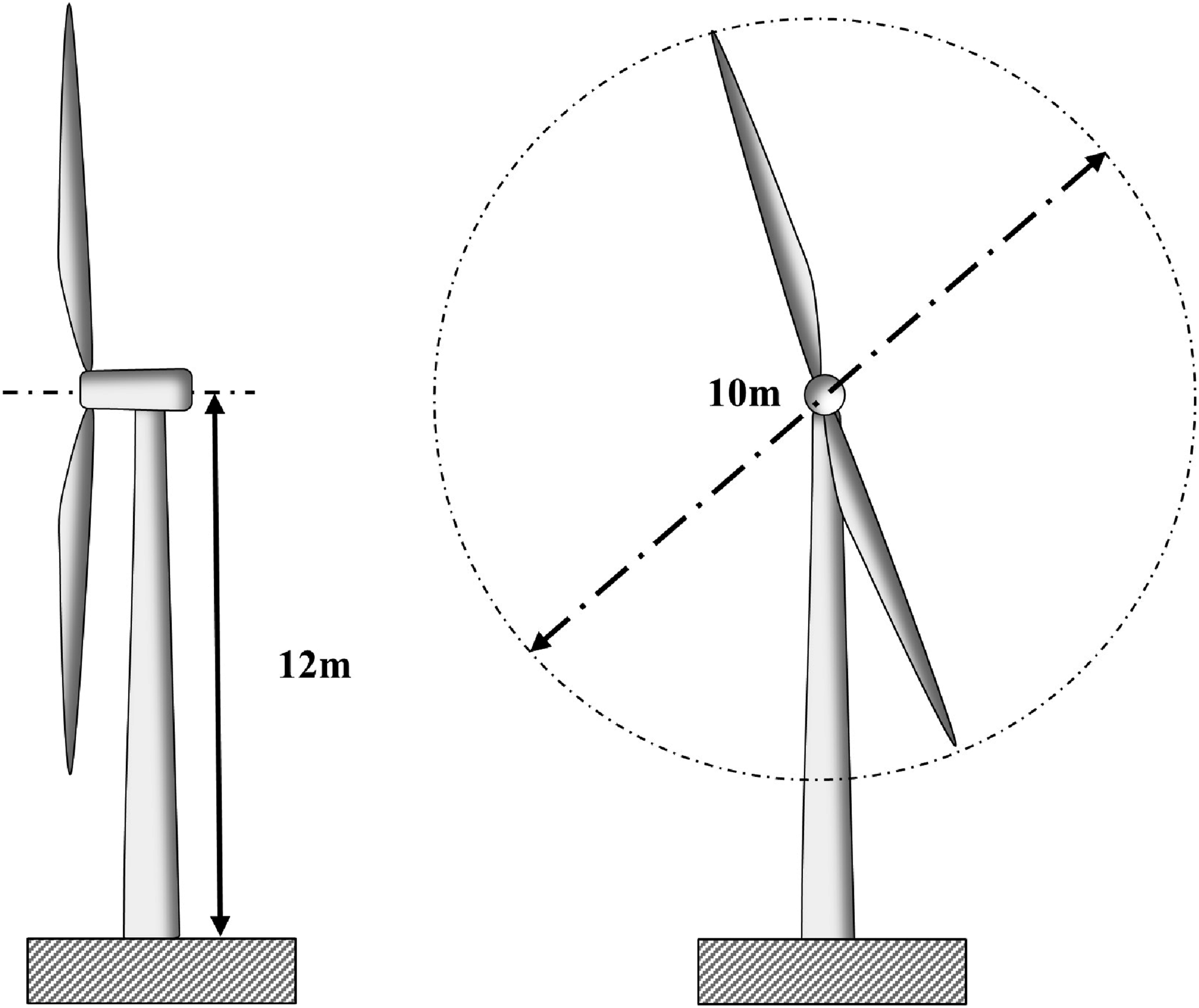
Calibration and validation using CCBlade
The aerodynamic performance of the wind turbine blade was analyzed using the CCBlade module from the WISDEM package, which implements blade element momentum theory (BEMT). The turbine geometry was defined using the radial distribution of blade sections, specifying the spanwise positions, chord lengths, and twist angles. The turbine rotor, composed of two blades, spans from a hub radius of 0.432 m to a tip radius of 5.029 m. The airfoil characteristics along the blade span were represented using pre-processed aerodynamic data files.
To simulate the rotor performance under varying conditions, the rotor was modeled with no tilt, precone, or yaw misalignment. A constant air density of 1.225 kg/m3 and dynamic viscosity of 1.81,206 × 10−5 Pa⋅ s were used, assuming a hub height of 12.192 m and no wind shear effects.
The rotor’s performance was evaluated for a range of tip speed ratios (TSRs) from 1.5 to 8, using a fixed rotor speed of 72 r/min. For each TSR, the corresponding wind speed was calculated. Pitch angles of 2°, 3°, and 4° were considered. According to Jonkman (2003), the UAE wind turbine’s tip twist is −1.815° relative to the point of zero aerodynamic twist at the 75% span location. Therefore, the blade collective pitch angle should be adjusted by adding 1.815° to the specified pitch angles to ensure that the angle between the tip chord line and the rotor plane corresponds to the given pitch angles for all “blind comparison test cases (Jonkman, 2003)” referring to the Blind Comparison study of the NREL UAE Phase VI.
The simulation involved computing distributed aerodynamic loads along the blade, such as the local lift and drag forces (C l and C d ), angle of attack (α), and axial induction factors (a and a′).
The ratio of drag to lift (C d /C l ) was computed at each radial station, and the mean value was extracted for analysis. Additionally, the power coefficient (C p ), rotor power (P), and mean angle of attack were recorded. The results were stored and exported as a text file for further analysis, including key variables such as pitch angle, TSR, wind speed, C p , C d /C l ratio, α, a′, and rotor power. This approach allows for a detailed assessment of the aerodynamic performance of the blade, including the impact of varying pitch and TSR on the C d /C l ratio.
To refine the model, we use Blade Element Momentum (BEM) theory to determine C d /C l as a function of the tip speed ratio λ for each β. We employ the open-source tool CCBlade for this calibration process.
Initially, We calibrated the model using data from the NREL Ames Phase VI wind turbine. For this, we utilized the three-dimensional airfoil data provided by Jonkman (2003), generated through the utility program FoilCheck, which extrapolates two-dimensional airfoil data from a recognized Blind Comparison participant via AeroDyn subroutines. We also considered post-stall effects using the Viterna-Corrigan equations (Viterna and Corrigan, 1982) and assessed stall delay characteristics using a method similar to that of Du and Selig (1998).
Figure 2 show the rotor power and power coefficient data extracted from CCBlade. Comparison of measured and predicted C
p
(top) and rotor power (bottom) for the NREL Ames wind turbine using CCBlade.
Due to the observed non-linearity in the C
d
/C
l
ratio (Figure 3), we employed an exponential model to capture this relationship. To determine the unknown parameters of this model, we utilized the least squares algorithm from SciPy.
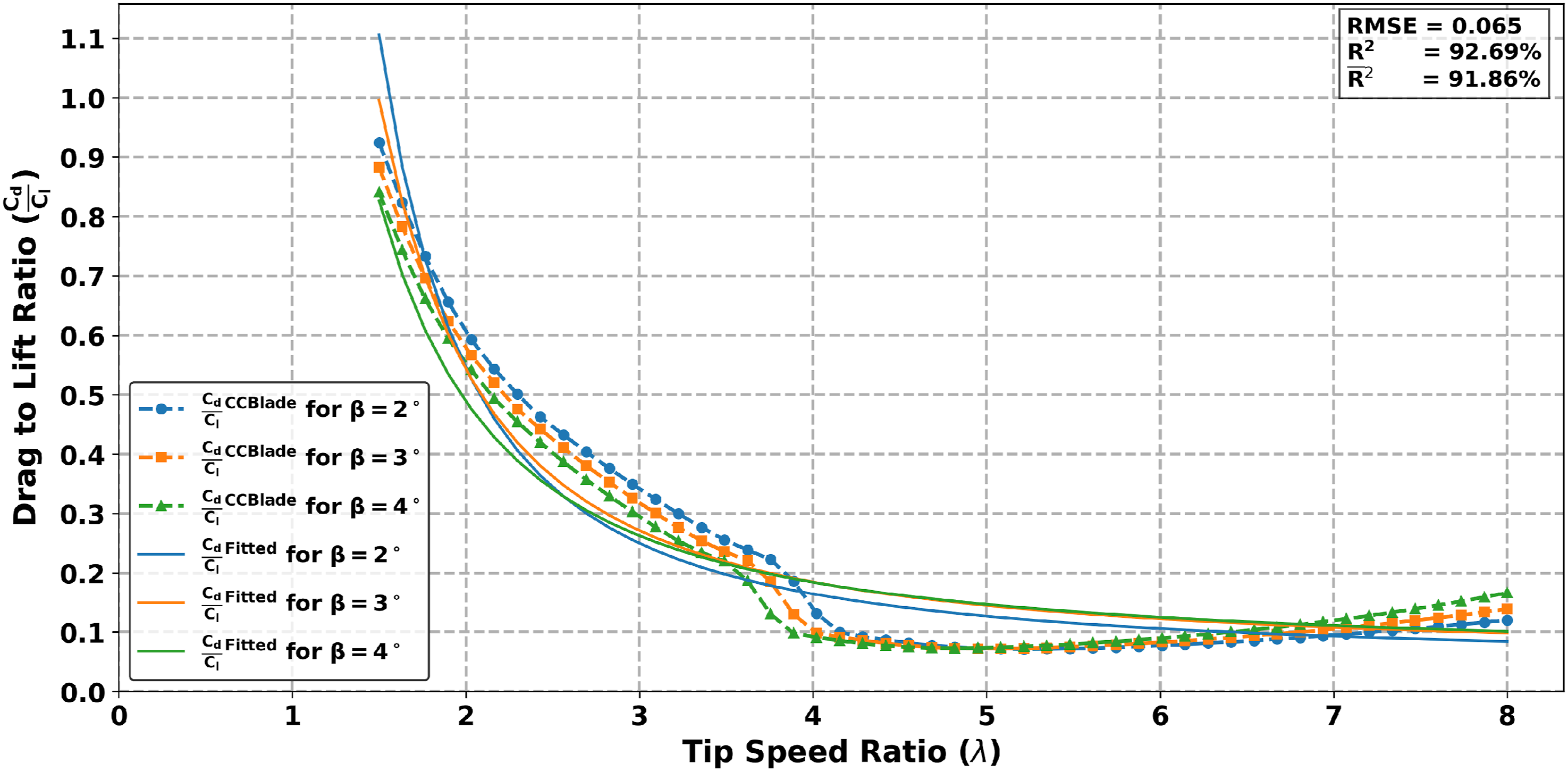
Fitted C d /C l ratio of the NREL Ames wind turbine, obtained by fitting equation (8) using least squares analysis.
In this model, we employed Γ defined in equation (7) instead of λ to effectively account for the influence of β. This modification enhanced the model’s fit, as assessed through key metrics such as RMSE, R2, and adjusted R2.
By incorporating the drag effect represented by the C
d
/C
l
ratio model into the parametric framework outlined in equation (4), and replacing λ with Γ, the resulting parametric model can be expressed as follows:

This revised model incorporates the drag effect and addresses the limitations of previous models, providing a more accurate representation of the power coefficient for stall-regulated wind turbines.
Solution method using the Trust Region Reflective algorithm from SciPy’s least squares
In a prior study by Katoch et al. (2021), it was demonstrated that conventional optimization techniques, such as least squares (LS), instrumental variables, and maximum likelihood methods, often struggle to find the global optimum in nonlinear search spaces. These techniques are prone to becoming trapped in local minima, which can significantly limit their effectiveness.
Recent advancements in artificial intelligence (AI) have introduced more robust tools to address these challenges. For instance, Differential Evolution (DE) has shown considerable effectiveness in parameter identification for complex models. DE excels by simultaneously evaluating multiple points in the parameter space, which facilitates rapid convergence to the global optimum and mitigates the issue of local minima. This method is particularly versatile as it does not require the search space to be differentiable or continuous (Storn and Price, 1995).
Similarly, Genetic Algorithms (GAs) have proven effective for parameter identification in complex models with multiple local minima, where traditional optimization methods often fall short (Katoch et al., 2021).
In this paper, we focus on the utility of deterministic techniques, particularly the least squares algorithm. We aim to demonstrate that solving nonlinear problems effectively hinges on selecting an appropriate parametric model. By establishing this, we illustrate that a well-chosen parametric model can yield an excellent fit for experimental data, even when employing traditional optimization methods.
It is important to note that a poor initial guess in least squares methods can result in failure to converge or lead to suboptimal solutions (Zhang et al., 2021). To address this issue, we utilize an initial guess vector sourced from the literature. We demonstrate that with a well-chosen parametric model, the least squares algorithm from SciPy consistently converges and yields the best fit for the aerodynamic behavior of wind turbines.
The parametric models were implemented in Python using the SciPy and NumPy libraries. Model fitting was performed using the Trust Region Reflective algorithm available in SciPy’s least_squares function, which is well-suited for solving bounded nonlinear optimization problems. The residuals were computed directly on the power output, allowing for a more physically meaningful calibration. All simulations and parameter estimations were executed in a scripted environment to ensure reproducibility. The model was validated using the experimental dataset from the NREL Phase VI wind turbine, as described earlier in the Formulation of the Parametric Model section.
In Amour et al. (2022), it was shown that fitting the data for the NREL AMES Phase VI turbine using equations (6) and (7) leads to significant errors in predicted power at high wind speeds. This occurs because power is proportional to the cube of wind speed, as expressed in equation (10). Even with optimization via the Genetic Algorithm (GA), the issue remains unresolved. In this paper, we address the problem by applying a residual function in the least squares optimization, focusing directly on power P rather than the power coefficient C
p
. The following section demonstrates that this method achieves better accuracy.

Results and discussions

NU: Not used
In the model proposed by Saint-Drenan et al. (2020), which focuses on pitch-regulated wind turbines, we used best-fit estimates from Genetic Algorithm (GA) optimization as outlined by Amour et al. (2022). This provided a solid foundation for our subsequent optimization.
For our new parametric model (equations (9) and (10)), we adopted the GA-derived parameters as the initial guess for the least squares optimization. This strategy ensured a consistent starting point for parameter estimation, enhancing the robustness of our approach.
NU: not used.
RMSE: root mean square error in kW.
In contrast, the models presented by Saint-Drenan et al. (2020), Amour et al. (2022), and Thongam et al. (2009) demonstrate significantly enhanced accuracy and provide a better fit to the data. This improvement is largely due to the inclusion of the term c9λ from equation (6), which effectively captures the drag effect. While the ratio C d /C l is often assumed constant, neglecting it—as done in some other models—can lead to inaccuracies. Therefore, by incorporating this term, these models achieve a significantly better fit to the experimental data, highlighting the importance of accounting for drag in model development.
To further clarify our findings, we specifically compare our proposed model with those of Saint-Drenan et al. (2020), Amour et al. (2022), and Thongam et al. (2009), focusing on their accuracy. The results of this comparison are illustrated in Figure 4. Comparison of predicted and experimental values for the NREL AMES wind turbine models. Panels (a), (b), and (c) show the power coefficient C
p
for pitch angles of 2°, 3°, and 4°, while panels (d), (e), and (f) show rotor power P for the same values. Panel (g) presents comparative performance metrics. The fitting is performed for models by Saint-Drenan et al. (2020); Amour et al. (2022); Thongam et al. (2009) against the proposed model.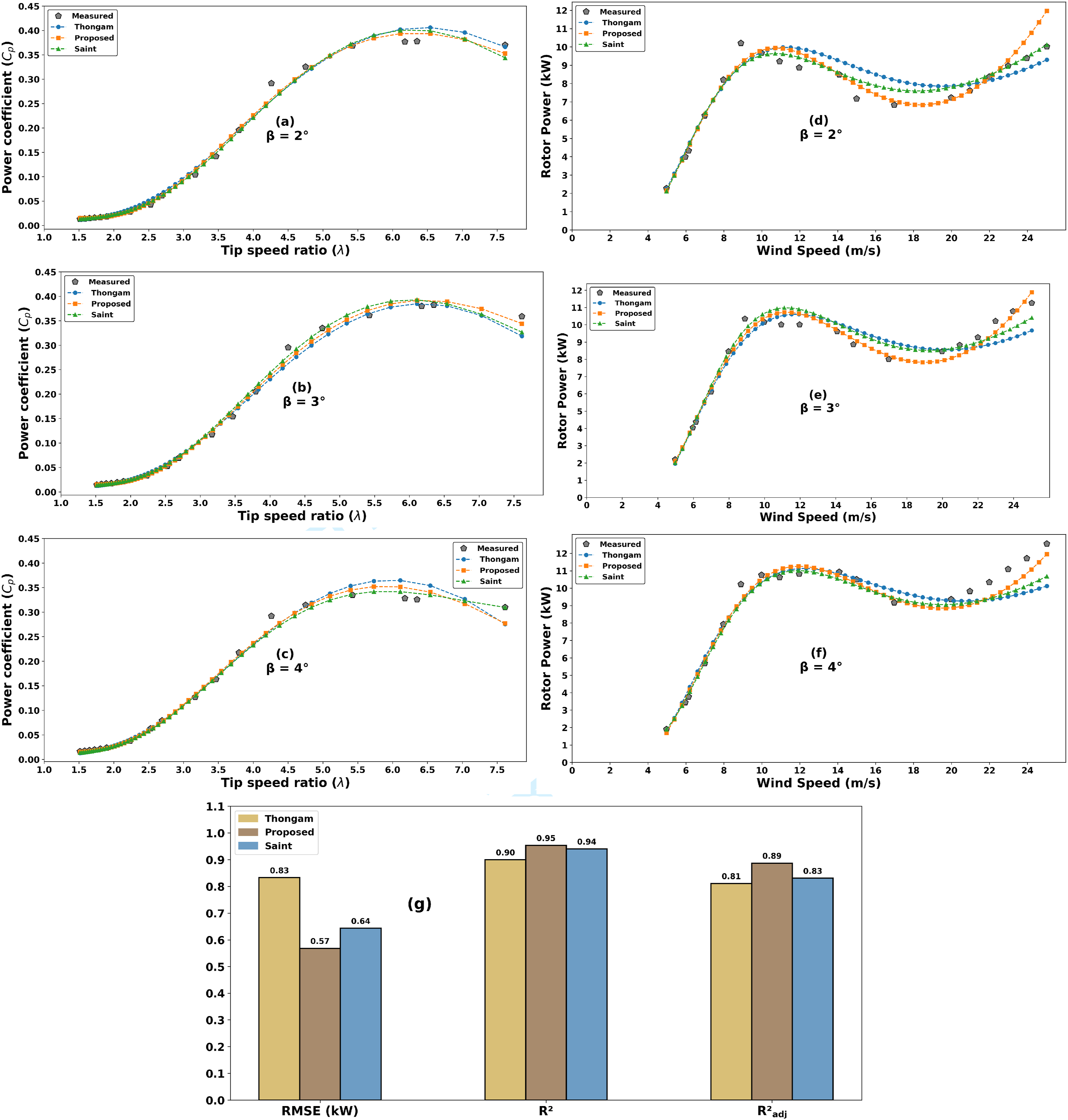
Our proposed model clearly outperforms those of Saint-Drenan et al. (2020), Amour et al. (2022), and Thongam et al. (2009), as shown in Figure 4. With an RMSE of 0.33 kW, an R2 value of 0.98, and an adjusted R2 of 0.96, our approach demonstrates a superior fit to the experimental data. These metrics emphasize the model’s effectiveness in capturing the complex aerodynamic behavior of wind turbines, marking a significant advancement over existing models in the literature.
Conclusion
This study introduces an innovative parametric model that enhances the estimation of the power coefficient (C p ) for stall-regulated wind turbines, addressing limitations in current polynomial, sinusoidal, and exponential models. The new model integrates the drag effect within the blade element momentum (BEM) theory, which improves upon the traditional exponential model used for pitch-regulated turbines.
A comparative analysis was conducted using literature models to fit the NREL Ames turbine. This analysis supports the physical description of the exponential parametric model, diagnosing why some models perform well while others do not, particularly regarding the incorporation of drag effects. Additionally, by comparing accurate models from the literature to our proposed model, we achieved an improved adjusted R2 of 0.96, up from 0.93, along with a reduction in RMSE from 0.41 to 0.33 kW, demonstrating a superior fit to the experimental data. These metrics underscore the model’s effectiveness in capturing the complex aerodynamic behavior of wind turbines, representing a significant advancement over existing literature.
Future work will focus on integrating this advanced parametric model into control systems for stall-regulated turbines. By employing co-design techniques, this integration aims to boost turbine efficiency and optimize wind energy systems. Additionally, future research could investigate the sensitivity to initial guesses to enhance model robustness and improve overall accuracy.
Footnotes
Acknowledgments
The authors gratefully acknowledge the support from the National Renewable Energy Laboratory (NREL) for providing the experimental data used in this study. Special thanks to the developers of the WISDEM tool and CCBlade for their invaluable contributions to this research.
Ethical approval
This study did not involve human participants, human data, or animals.
Author contributions
Amar Amour: Conceptualization, methodology, formal analysis, software, data curation, writing—original draft, and visualization. Abdelaziz Arbaoui: Supervision, validation, writing—review and editing, and project administration.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Nomenclature

| A | Area | (m2) |
| B | Number of blades | [-] |
| C p | Power coefficient | [-] |
| C d | Drag coefficient | [-] |
| C l | Lift coefficient | [-] |
| D | Rotor diameter | (m) |
| H | Hub height | (m) |
| R | Rotor radius | (m) |
| V | Wind speed | (m/s) |
| β | Blade pitch angle | (Deg) |
| α | Blade angle of attack | (Deg) |
| λ | Tip speed ratio | [-] |
| ϕ | Inflow angle | (Deg) |
| ρ | Air density | (kg/m3) |