
Abstract
Maximizing power output from wind turbines while minimizing harmful loads is a critical challenge for operators. Previous research explored the use of economic nonlinear model predictive control for wind turbine operation, but several important aspects were not fully addressed. This study advances the field by optimizing the weighting coefficients of the economic nonlinear model predictive control to improve performance. A comprehensive comparison is carried out between this method and conventional proportional–integral control. In addition, the economic nonlinear model predictive control is evaluated under extreme wind gust conditions in accordance with industry standards. Results demonstrate that the method increases power generation, reduces fatigue and structural loads on turbine components, and shows superior performance under both normal and gusty wind conditions. These findings highlight the potential of the optimized economic nonlinear model predictive control as a robust and effective strategy for improving efficiency and reliability in wind turbine operations.
Introduction
In recent decades, the growing emphasis on renewable energy sources has highlighted the potential of wind power as a major contributor to sustainable energy production. Enhancing wind turbine performance is essential for maximizing power output and ensuring high-quality, reliable electricity. This involves not only increasing energy generation but also managing mechanical loads and optimizing the turbine’s dynamic response to extend its operational lifespan and improve power production (Gao and Gao, 2016; Roghani Araghi et al., 2012).
Traditionally, wind turbine control has relied on classical methods, such as Proportional-Integral (PI) controllers (Benbouhenni et al., 2023; Errouissi et al., 2018; Wang et al., 2023; Zambrana-Lopez and Fernández-Quijano, 2020). While these methods are widely used, they often struggle with the complexities of modern multivariable wind turbine models (Civelek et al., 2016; Jazaeri and Samadi, 2015; Kumar et al., 2015; Menezes et al., 2018; Ren et al., 2016). Recent advances in control technologies have led to the development of more sophisticated approaches, such as model predictive control (MPC), which aim to improve power production and mitigate structural loads. MPC can handle multiple control objectives simultaneously, such as optimizing power capture and reducing mechanical loads (Mahdizadeh et al., 2021; Sachin et al., 2015; Truong et al., 2022).
MPC has emerged as one of the more advanced techniques for managing the complex dynamics of wind turbines. MPC can directly incorporate system constraints specific to wind turbines, such as maximum power output, rotor speed limits, and pitch angle restrictions. This capability allows for more efficient and safe operation of the turbine, while PI controllers typically struggle to manage these constraints effectively. Unlike PI controllers, MPC predicts future system behavior and adjusts control inputs, accordingly, making it highly effective in responding to fluctuating wind conditions. MPC has been successfully applied to wind turbines, demonstrating significant potential in reducing fatigue loads and improving power production (Hassan et al., 2012; Schlipf et al., 2013).
Among MPC variants, Nonlinear Model Predictive Control (NMPC) has gained attention for its ability to manage the nonlinear dynamics inherent in wind turbine systems (Barcena et al., 2020). NMPC improves performance by accounting for nonlinear aerodynamic effects and mechanical stress, but its complexity in tuning the control system can pose challenges, particularly in balancing competing objectives like power maximization and load minimization (Minchala et al., 2018; Sinner and Petrović, 2020).
To address these tuning challenges, economic nonlinear model predictive control (ENMPC) has been proposed. ENMPC focuses directly on maximizing system performance, simplifying the tuning process compared to traditional NMPC methods. By integrating an economic objective function, ENMPC aims to optimize both power production and operational costs, including reducing mechanical wear and tear (Gros, 2013).
In recent years, various MPC strategies have been developed to enhance wind turbine performance under varying operational conditions. Tang et al. proposed a robust MPC framework based on Bayesian parameter self-optimization for a 5 MW wind turbine, demonstrating effective parameter tuning to handle wind speed fluctuations and improve system stability (Tang et al., 2023).
Robust MPC approaches primarily focus on maintaining system stability in the presence of uncertainties, often without explicitly targeting economic optimization. Klein et al. designed and practically evaluated a robust MPC scheme for wind turbines, showing stable performance under partial load, transient, and low-load conditions (Klein et al., 2025).
Adaptive MPC methods enhance controller flexibility by updating parameters online to cope with system changes; however, they generally do not prioritize economic objectives. Zhu et al. introduced an adaptive MPC-based hierarchical frequency regulation strategy for integrated wind-storage systems, improving system responsiveness without direct economic optimization (Zhu et al., 2025).
LIDAR-assisted MPC utilizes upstream wind measurements to improve control accuracy, but this approach depends on additional sensing infrastructure. Loew and Bottasso developed a LIDAR-assisted MPC method incorporating online rainflow counting and stress history to mitigate fatigue loads, effectively enhancing turbine economic performance (Loew and Bottasso, 2022).
Despite the advantages of existing MPC methods, simultaneously balancing economic performance and structural load reduction remains challenging. The proposed ENMPC approach addresses this challenge by directly optimizing key economic objectives such as maximizing power output and minimizing loads through nonlinear dynamic modeling. The ENMPC method demonstrates stable and efficient performance even under wind gust conditions, contributing to improved turbine efficiency and extended lifespan. This study focuses on optimizing tuning parameters and weighting coefficients of the controller to enhance ENMPC performance under realistic and dynamic wind scenarios.
ENMPC controls a wind turbine through the following steps: (1) Nonlinear system modeling • A nonlinear mathematical model of the wind turbine dynamics is developed, including wind speed, rotor speed, pitch angle, and generator torque. (2) Predicting future behavior • Using the nonlinear model and real-time data, ENMPC predicts the system’s behavior over a future time horizon. (3) Solving an optimization problem • At each control step, ENMPC optimizes a cost function, such as maximizing power generation while minimizing mechanical stress. • Physical constraints, such as maximum rotor speed and pitch angle limits, are considered in the optimization. (4) Determining and applying optimal control inputs • After solving the optimization problem, optimal control inputs, such as pitch control and generator torque control, are determined and applied to the system. (5) Iterative process at each time step • This process is repeated at each time step, continuously updating the model and optimizing control actions.
A recent study has validated ENMPC for high-accuracy wind turbine models, demonstrating its potential to improve turbine performance. However, certain gaps remain in the existing literature, which this paper seeks to address (Roghani Araghi et al., 2020).
In particular (Roghani Araghi et al., 2020), identified three key limitations of ENMPC implementations: (1) Optimal selection of ENMPC weighting coefficients was not performed. (2) There was no comparison with traditional control strategies like the PI controller. (3) The system was not tested under wind gust conditions, which are critical for real-world applications where turbines may face extreme wind scenarios.
This paper addresses these limitations by refining the ENMPC algorithm and optimizing its coefficients to balance power production and load reduction. We also compare ENMPC with the traditional PI controller, using data from the National Renewable Energy Laboratory (NREL) technical report. Furthermore, the robustness of ENMPC is tested under extreme wind gust conditions, based on the IEC standards for wind turbine operation. These contributions provide a more comprehensive evaluation of ENMPC and demonstrate its applicability in real-world wind turbine systems.
By building on previous work and addressing its shortcomings, this paper aims to how properly tuned ENMPC can significantly improve power output and reduce mechanical stress, outperforming traditional PI control methods. This research contributes to the growing body of knowledge on advanced control strategies for renewable energy systems, offering a practical solution for improving wind turbines’ power production and longevity.
This paper is structured as follows: Section II outlines the modeling of the wind turbine, including the dynamic equations governing the system and the parameters used for simulation. Section III describes the control strategy, focusing on tuning the ENMPC coefficients. Section IV presents the simulation setup and results, including a detailed analysis of the competing objectives in ENMPC and how optimal tuning improves the balance between energy generation and load reduction. Section V provides a comparison between PI controllers and the ENMPC approach. Testing the ENMPC method for the wind gust is presented in Section VI. Finally, Section VII concludes the paper by discussing the implications of the findings and potential future research directions.
Wind turbine model
The wind turbine model utilized in this study has been thoroughly validated using the FAST simulation code, which is widely acknowledged for its high accuracy in modeling wind turbine dynamics. The model considered in this paper has been validated against the state-of-the-art wind turbine simulation code FAST (Gros et al., 2017; Jonkman and Marshall, 2005; Roghani Araghi et al., 2020). The model incorporates key control variables such as blade pitch angle and generator torque, which are critical factors for optimizing turbine performance. The state vector includes essential parameters such as tower deflection, generator angular velocity, and drivetrain torsional angle, enabling a comprehensive analysis of the turbine’s response to varying wind conditions.
Equations (1)–(3) represent a simplified but physics-based model of wind turbine dynamics, capturing the interaction between aerodynamic forces and structural dynamics. The three equations (1)–(3) describe the coupled wind turbine model across three main degrees of freedom: • • •
The governing equations (1)-(10) with 8 state variables, which account for the three blades of the turbine (i = 1, 2, 3), are presented below, though further elaboration is omitted for the sake of brevity:
Tower dynamics
The equation of motion for the tower fore–aft displacement is given as:

The second law of Newton is applied to the equivalent mass–spring–damper model of the tower. The resultant horizontal force from the wind is the sum of the thrusts of the three blades.
Generator rotation dynamics
The rotational dynamics of the generator are described as:

This equation represents the net torque acting on the generator. It is formulated based on Euler’s rotational dynamics for rigid bodies and effectively captures the coupling between the generator and the drivetrain shaft.
Shaft torsion
The shaft torsional dynamics are:

This is the same torsional mass–damping–stiffness model for the shaft.
Where: Changes of 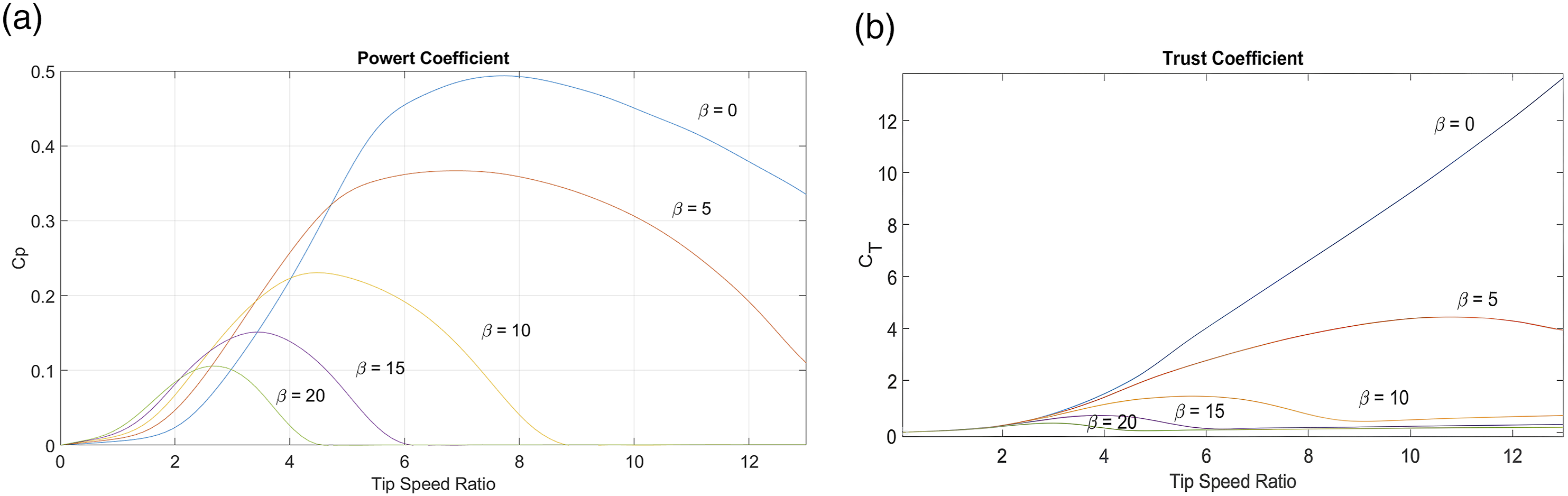





Considering the above nonlinear dynamics as

Also, the input vector of the wind turbine model is:

Control strategy
Wind turbines generally operate in two distinct regimes: partial load (below the rated wind speed) and full load (above the rated wind speed). The partial load regime encompasses wind speeds between the cut-in wind speed,
This paper optimizes ENMPC weighting coefficients to balance energy generation and structural load reduction in wind turbines. A cost function is designed to fine-tune key parameters, ensuring maximum energy output while minimizing mechanical stress. This approach enhances the turbine’s long-term performance by effectively managing trade-offs.
Mathematical formulation of ENMPC
The ENMPC problem is posed over a finite prediction horizon




The system states and inputs are subject to physical constraints:



System dynamics and prediction model and horizon
The nonlinear turbine dynamics are modeled by:

A discrete-time model derived from the nonlinear equation is used for prediction in the MPC framework. The prediction horizon
Optimization algorithm
At each time step k, the ENMPC solves the following constrained nonlinear optimization problem (Roghani Araghi et al., 2020):

Due to nonlinearities and real-time constraints, the optimization is solved approximately using the Real-Time Iteration (RTI) scheme of Sequential Quadratic Programming (SQP). This involves: (1) Linearizing the nonlinear system and cost function around the current predicted trajectory. (2) Formulating a Quadratic Programming (QP) subproblem:

Only a single SQP iteration is performed at each control interval to maintain real-time feasibility, using the previous solution as a warm start for the next iteration.
Implementation details
(1) The optimization problem is solved every 0.2 seconds (sampling time). (2) The prediction model incorporates measured wind speed and estimated disturbances. (3) The weighting matrices (4) Constraints ensure safe operation within the mechanical and electrical limits of the turbine.
Simulation and results
In this study, we simulate a 5 MW wind turbine, aligning with the limitations and specifications of the NREL 5 MW reference turbine (Jonkman et al., 2009). The simulation spans a total duration of 600 seconds. To accurately represent real-world conditions, the wind speed is modeled using an IEC 61,400 wind profile, which is a standard for assessing wind turbine performance. The simulation is conducted with a sample time of 0.2 seconds to ensure high temporal resolution.
The prediction horizon for the control algorithm is set to 50 samples, equating to a 10-s forecast of wind speed. This allows for effective short-term forecasting and control adjustments. The prediction is according to (Roghani Araghi et al., 2020).
Wind turbine control requires solving a complex optimization problem, which traditional methods like linear and convex programming cannot address. As mentioned, to meet the real-time demands of wind turbine systems, RTI is applied to simplify the problem at each step by linearizing both the objective and the constraints, forming a QP. Although SQP is typically employed, it cannot afford the time necessary for full convergence. Hence, only one iteration is conducted before transitioning to the next problem.
To assess the practical applicability of the proposed ENMPC strategy, the execution time of the control algorithm was evaluated using MATLAB on a standard personal computer (Intel Core i7, 3.8 GHz, 32 GB RAM). The average computation time per control step was approximately 60 milliseconds, which is well within the 200-ms sampling interval used in this study. These results confirm that the proposed method is suitable for real-time implementation. Furthermore, the use of the RTI scheme for solving the nonlinear optimization problem significantly improves numerical efficiency, making it well-suited for real-time industrial control applications such as wind farm Supervisory Control And Data Acquisition (SCADA) systems.
The wind turbine model was implemented in MATLAB using CASADI. CASADI is a library for symbolic representation and automatic differentiation, allowing precise definition of system dynamics and constraints. This capability is particularly important for the design and implementation of ENMPC, as accurate derivatives are essential for solving the nonlinear optimization problem at each time step. Simulations were conducted in MATLAB using CASADI’s optimization and integration tools to efficiently evaluate the ENMPC performance under varying wind conditions and scenarios involving changes in turbine torque and speed. The use of CASADI enhanced computational accuracy and reduced simulation time, enabling thorough analysis of system behavior under realistic and variable operating conditions.
As shown in Figure 1, the behavior of the
The wind profile used in this simulation, with a mean wind speed of 11 m/s, which significantly impacts the turbine’s performance, is depicted in Figure 2. This plot illustrates the wind speed variations over time and provides a visual context for the simulation parameters and results. The wind profile used in this study is generated based on standard wind models recommended by international guidelines for wind turbine simulations. These profiles are synthesized using stochastic models that replicate the statistical properties of natural wind, such as turbulence intensity and mean wind speed, following standards like IEC 61,400-1. This approach ensures that the wind input reflects practical operating conditions for utility-scale turbines and enables a meaningful evaluation of the controller’s performance. The IEC wind profile sample.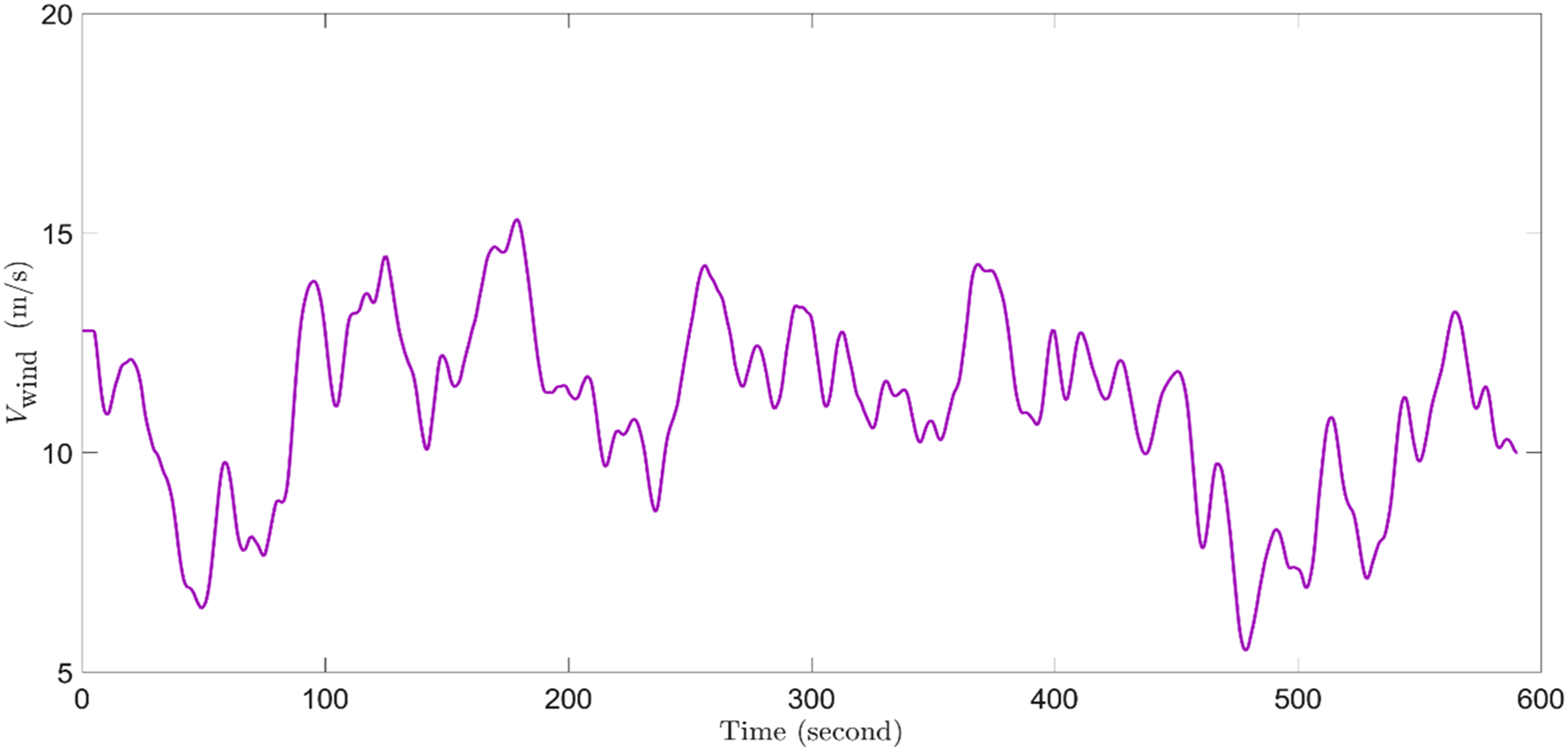
In (Roghani Araghi et al., 2020), the weighting coefficients for the competing objectives were uniformly applied, which restricted the method’s capacity to find a trade-off between production and load. A range of control weight sets was evaluated to identify the optimal setup. Given the impracticality of testing an exhaustive range of weights, the study focused on weights corresponding to powers of ten, specifically 1, 0, and −1. The results demonstrate that this approach yields the highest power output and the lowest penalties for the competing objectives. By adjusting these coefficients, the ENMPC can be tailored to prioritize either energy efficiency or load reduction, depending on operational requirements.
Simulation results for various weights of competing objectives (rows highlighted appear on the Pareto front).
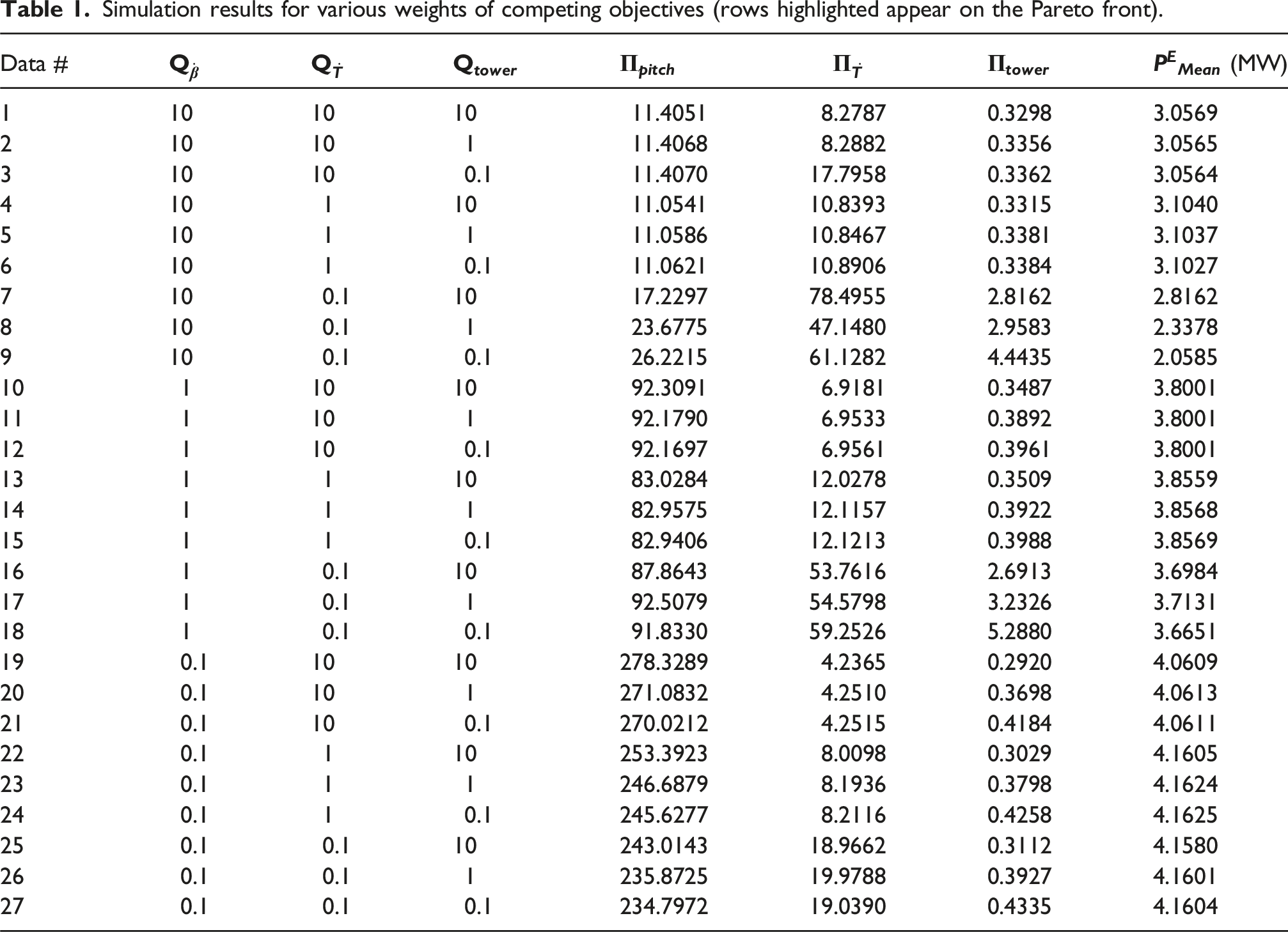
The penalties have been integrated over the entire simulation period, and their total values are presented in the table as follows:
Weights exceeding 10 or below 0.1 did not significantly affect over those detailed in the table and are thus omitted for brevity.
The simulation results for different weight configurations, as presented in Table 1, are discussed in detail. The maximum power generation is observed in the sets from the 22nd to the 24th entries, where the generated power (
Sensitivity analysis and optimal operating point selection using pareto fronts
To identify the optimal operating point of the system, a sensitivity analysis was performed focusing on three penalty criteria—
The analysis involved pairwise comparisons of the penalty criteria against each other and against the average power output. By evaluating these objectives two at a time, it was possible to explore how improving one objective affects the others. The Pareto front methodology was employed to capture these trade-offs, identifying sets of non-dominated solutions where no single objective can be improved without degrading at least one other.
Figure 3 illustrates the Pareto fronts obtained from this analysis. In the 3D scatter plots, blue points represent the complete dataset of operating points, while red points highlight Pareto-optimal solutions. These optimal points are of particular interest because they provide the best possible compromises between conflicting objectives. Three-Dimensional Pareto Fronts of Penalty Indices and Power Output. Blue points represent all evaluated cases, while red points indicate the non-dominated (Pareto-optimal) solutions.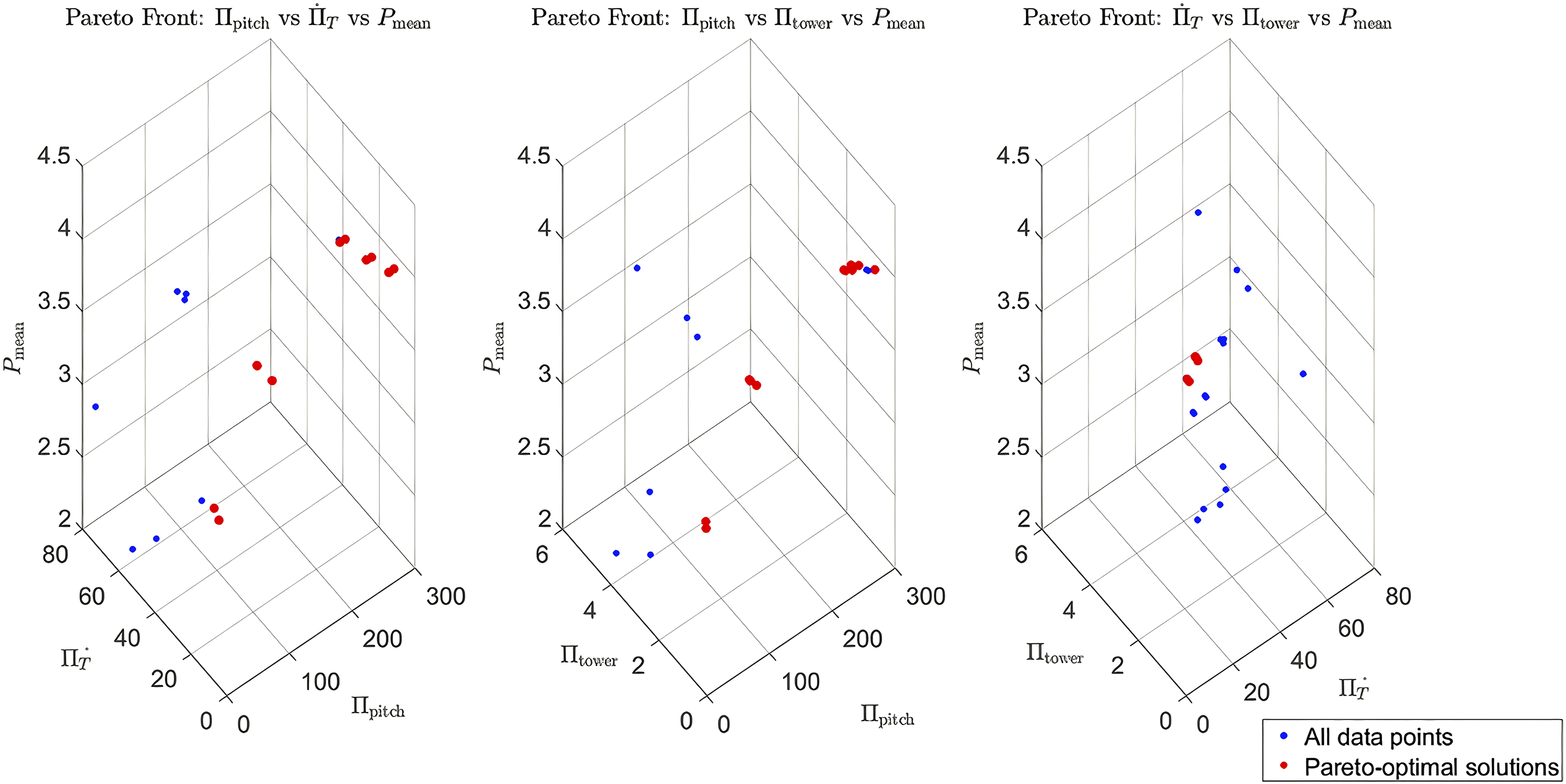
The analysis was conducted for all three possible pairs of criteria, resulting in multiple sets of Pareto fronts. Notably, certain operating points (rows 19, 22, 23, and 24) consistently appeared on these fronts across different comparisons, demonstrating their robustness and suitability from various optimization perspectives. These selected rows have been highlighted in Table 1.
To select the final optimal operating point from these candidates, an Efficiency Index was defined. This index quantifies the trade-off by calculating the ratio of the average power output to the sum of the three penalty terms for each operating point. The candidate corresponding to row 24 achieved the highest Efficiency Index, indicating the best balance between maximizing power output and minimizing structural penalties. Consequently, row 24 was identified as the system’s optimal operating point.
Since the minimum value of the pitch rate objective is found in the 4th set, a detailed comparison between the 4th and 24th sets is needed.
Figures 4 and 5 provide a visual representation of this comparison. Figure 4 illustrates the generator speed, blade pitch angle, generator torque, and wind profile for the 4th and 24th data sets. Comparison of generator speed, blade pitch angle, generator torque, and wind profile under ENMPC control for two representative datasets (Data 4 and Data 24), illustrating the controller’s response to varying wind conditions. Comparison of the penalty terms, generated power, 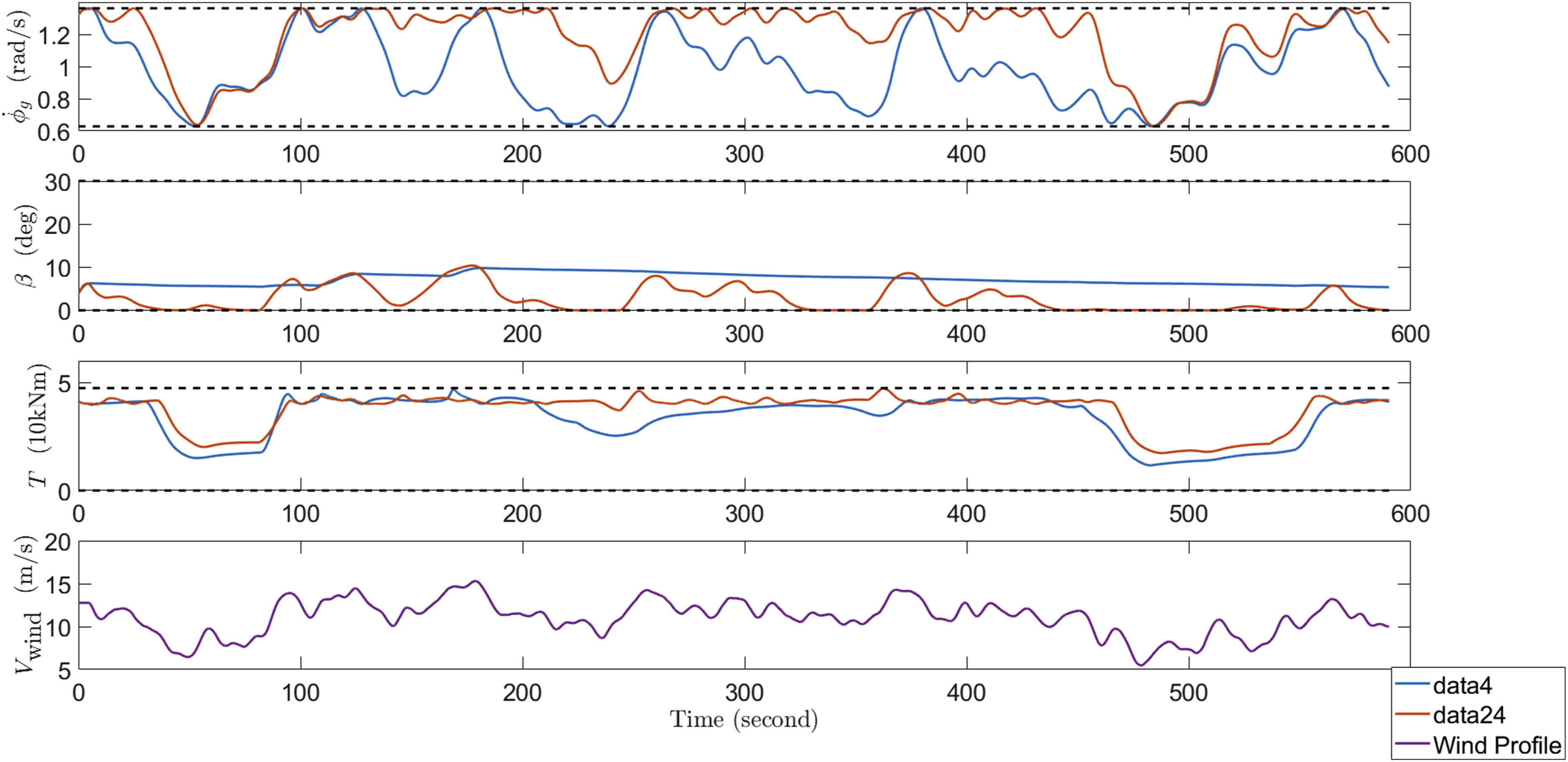
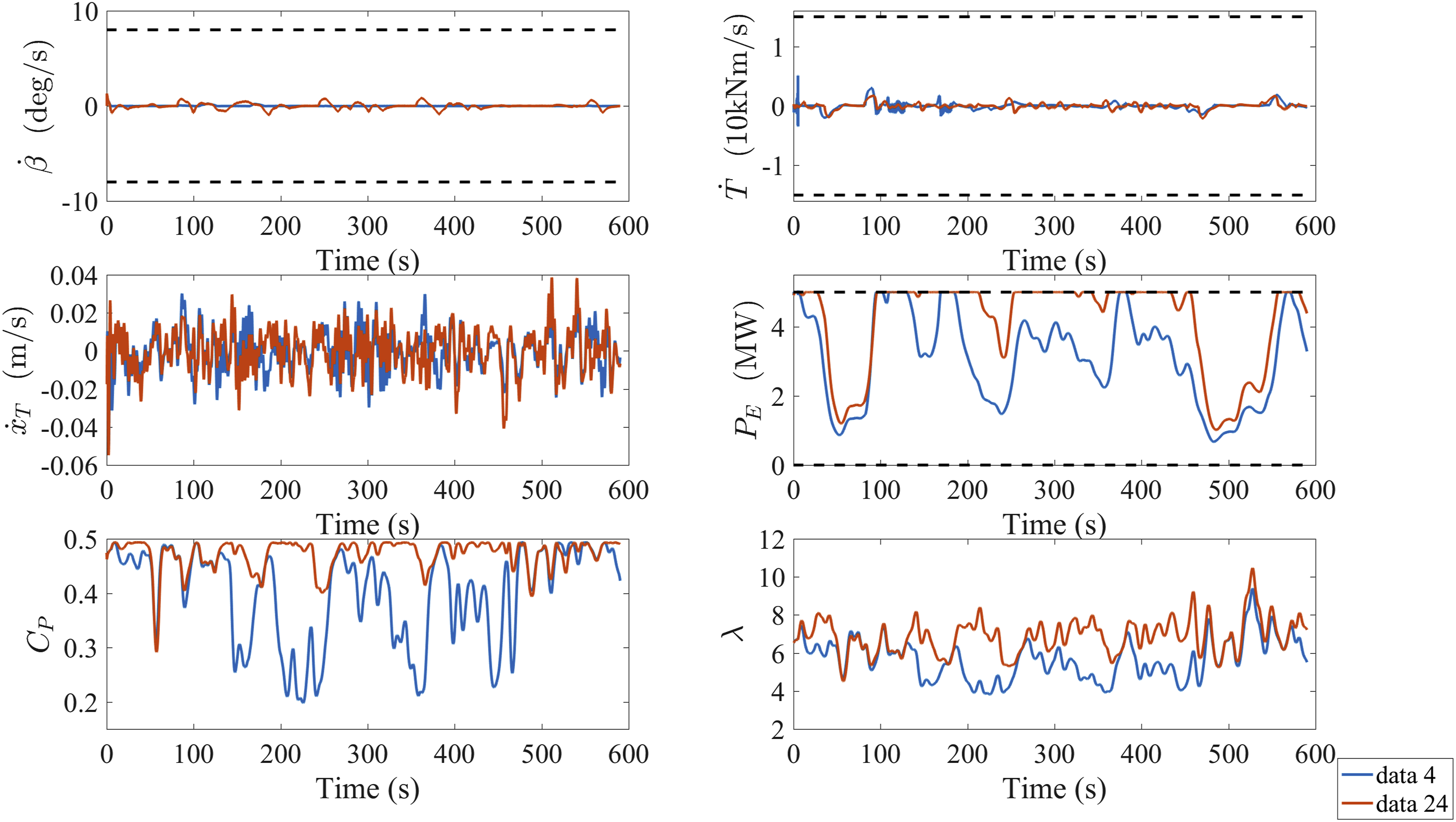
Additionally, penalties, generated power,
This detailed examination underscores the importance of carefully balancing the weights of competing objectives to optimize both energy generation and structural integrity. The results demonstrate that while minimizing the pitch rate objective can reduce penalties associated with pitch control, it may inadvertently lead to higher structural loads and reduced overall power output. Thus, a nuanced approach to weight selection is crucial for achieving optimal performance in wind turbine control strategies.
Based on the above analysis, the best weighting is observed in the data sets from the 22nd to the 24th entries. However, achieving ideal tuning necessitates incorporating a cost model for actuator activity and tower fatigue. Such a model would translate the time series of actuator demands and tower motion into financial costs, allowing a formal and direct comparison with the benefits of energy generation.
Among the evaluated configurations, the 24th set demonstrates the highest generated power and near the lowest pitch rate. Additionally, the other competing objectives,
The findings in this section underscore the crucial role of selecting and tuning the weights accurately. Effective weight tuning is essential to ensure that the system performs at its best, delivering both high power production and minimal adverse effects on the turbine’s components.
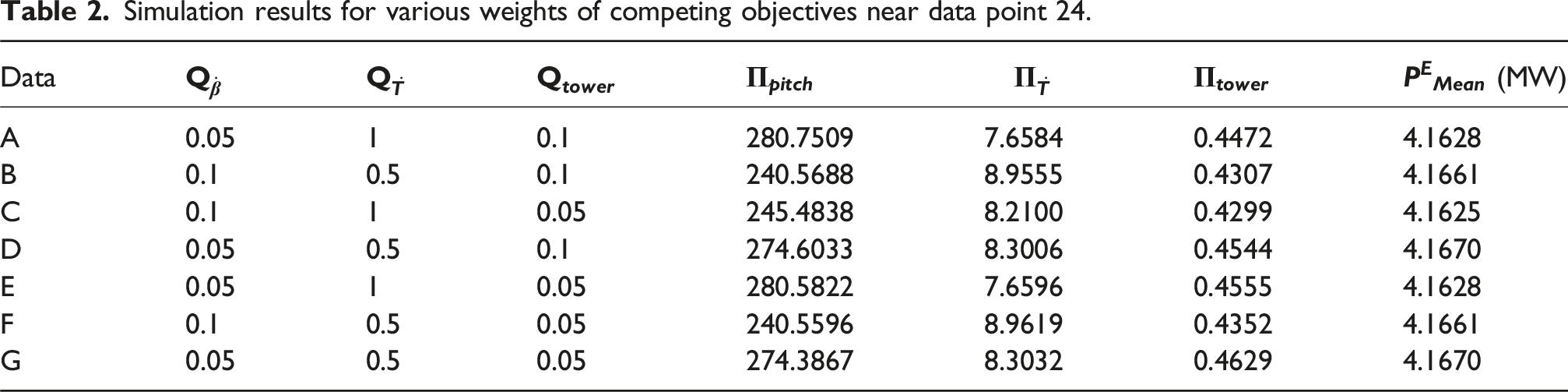
Simulation results for various weights of competing objectives near data point 24.
It is worth noting that for higher weighting coefficient values corresponding to dataset 24, as expected (based on other rows in Table 1), no better results were obtained compared to row 24. Therefore, to avoid unnecessary length, those additional results are not presented.
Additional investigation and discussion
As outlined in the introduction, evaluating the ENMPC method necessitates a comparison with traditional control strategies, such as the PI controller, which is widely used in industry. This section presents a comparative analysis between the PI controller, as documented in the NREL technical report (Jonkman and Marshall, 2005), and the ENMPC method with optimized weighting coefficients.
The control strategies compared are as follows: (1) (2)
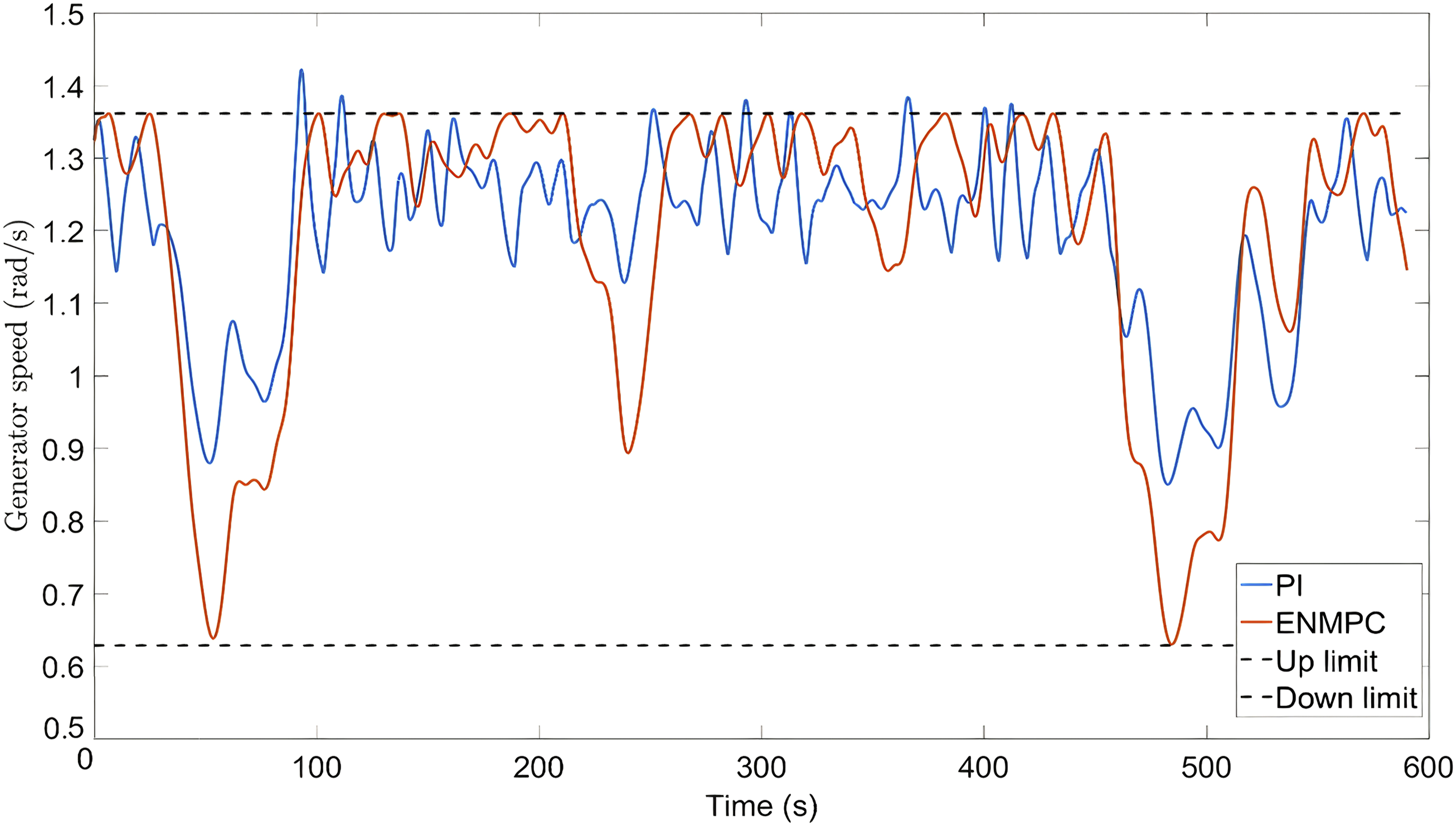
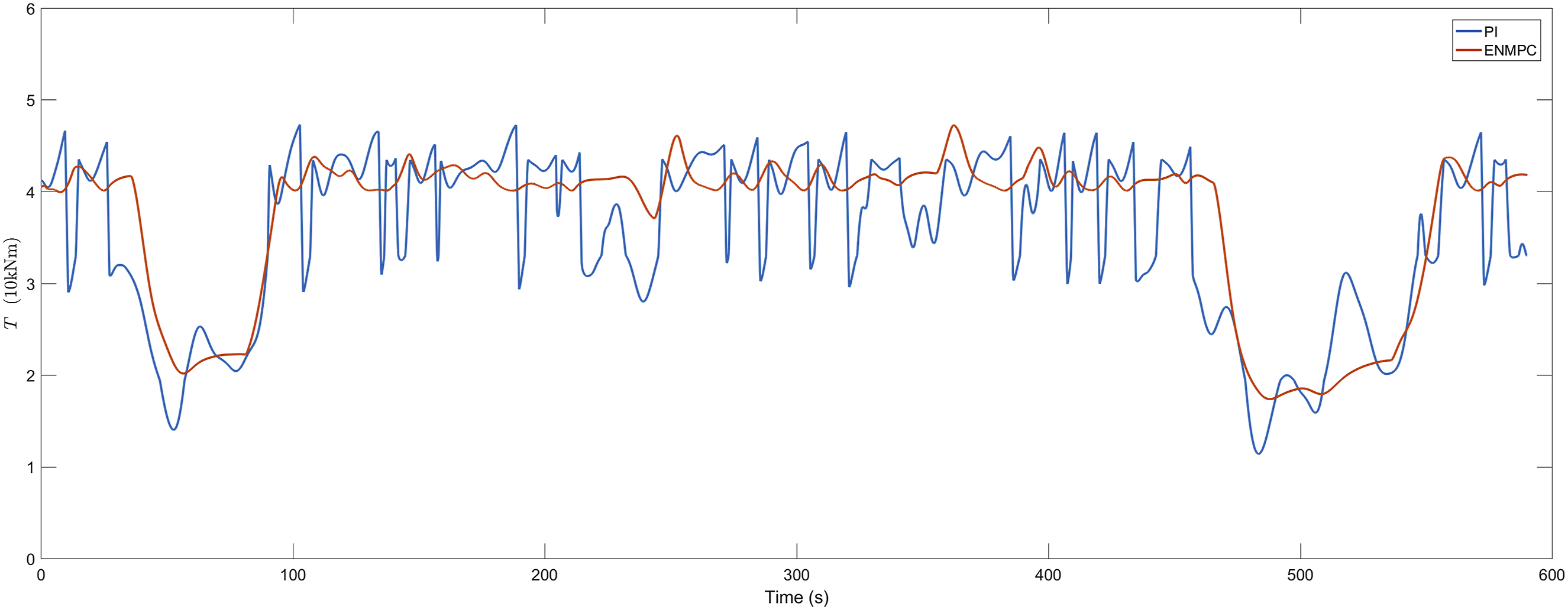
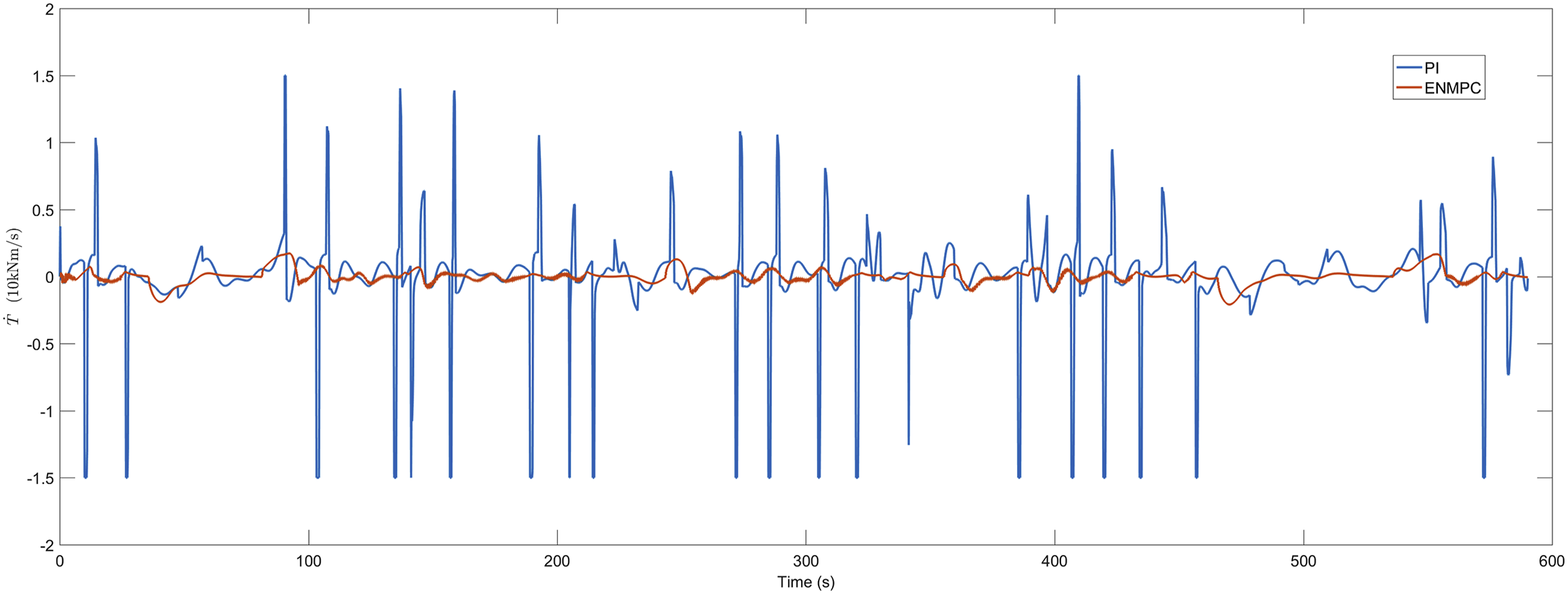
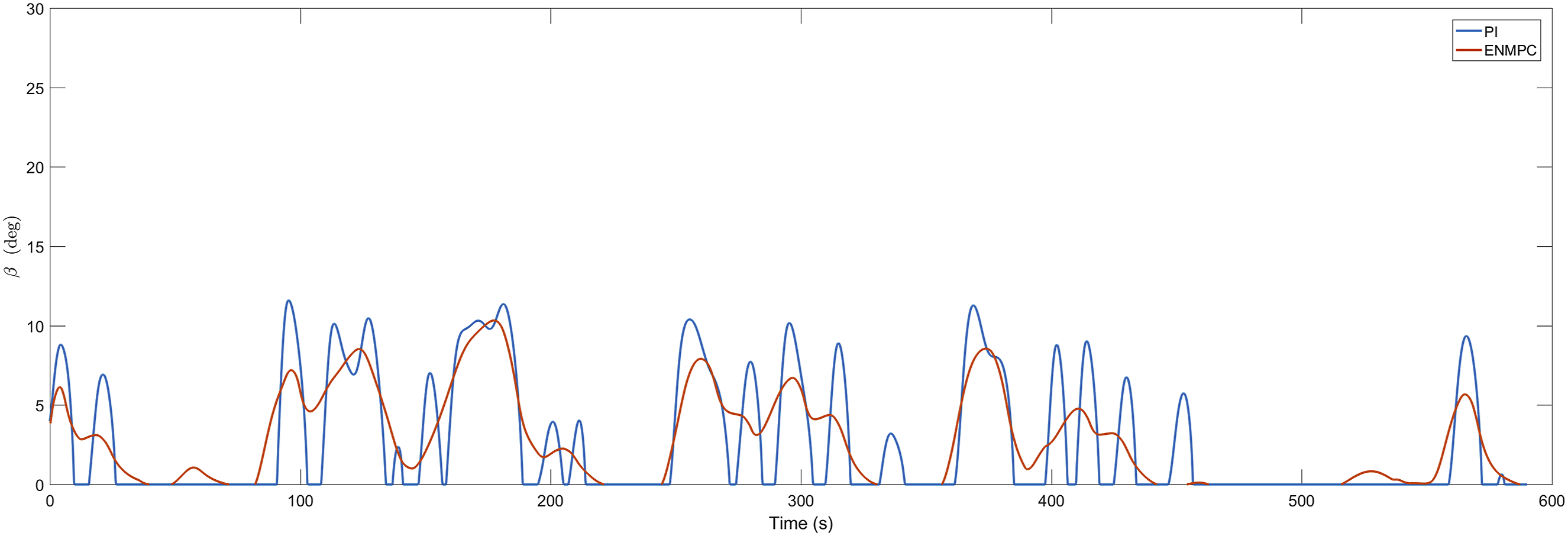
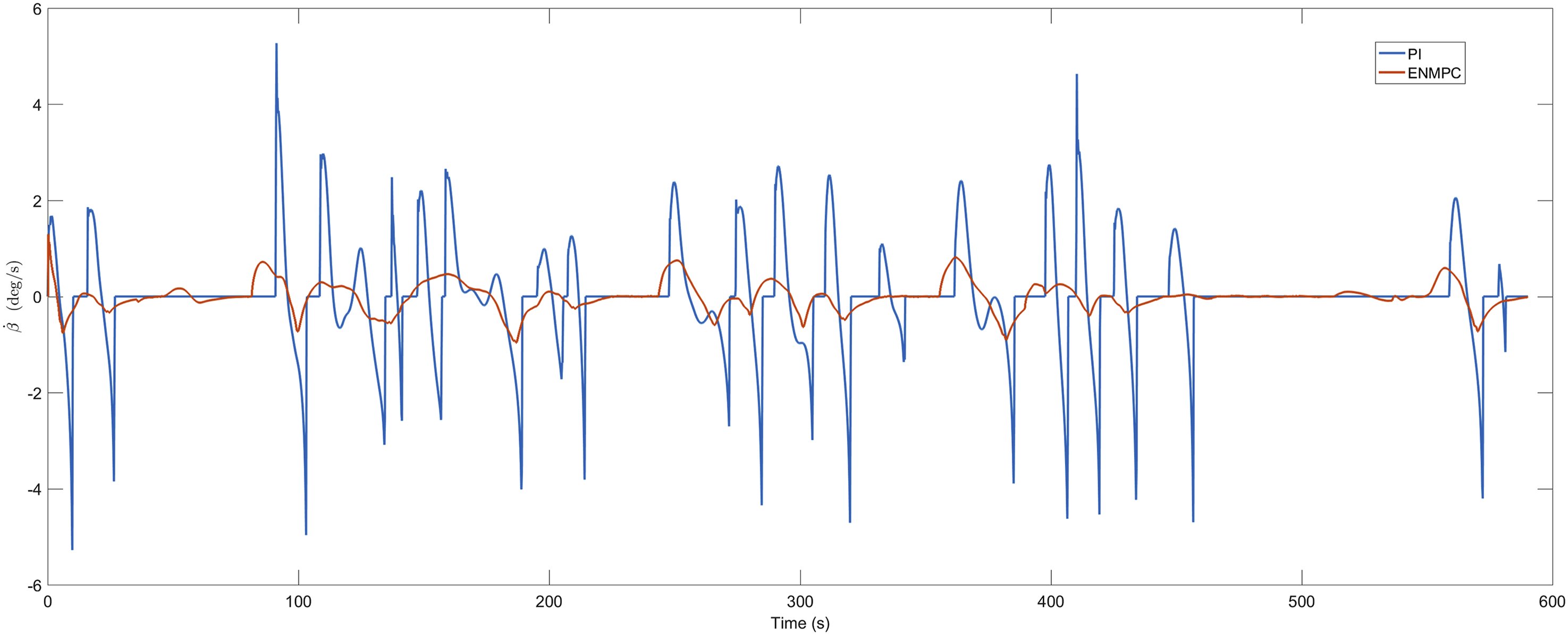
Both control strategies are evaluated using the IEC wind profile, consistent with the conditions described in the previous section. The results of this comparison are illustrated in Figure 6–11, which depict various performance metrics for both control methods. These figures provide a detailed view of how each strategy performs under the same wind conditions, allowing for a thorough assessment of their respective strengths and weaknesses. Generated power comparison between the NREL-based PI controller and the proposed ENMPC, demonstrating the energy efficiency improvements achieved by the latter. Comparison of generator speed regulation under the conventional PI controller (NREL method) and the proposed ENMPC approach, illustrating the enhanced dynamic response and stability achieved by the advanced control strategy. Comparison of generator torque responses under the conventional PI controller (NREL method) and the proposed ENMPC, highlighting improved torque regulation and reduced fluctuations achieved through advanced control. Comparison of generator torque rate under the PI controller (NREL method) and the proposed ENMPC strategy, emphasizing smoother torque transitions and reduced mechanical stress with the advanced control approach. Comparison of blade pitch angle response under the PI controller (NREL method) and the proposed ENMPC, highlighting faster adaptation and smoother blade regulation enabled by the advanced control technique. Pitch angle rate comparison: PI controller (NREL method) versus ENMPC, showing improved smoothness and control in pitch adjustments by ENMPC.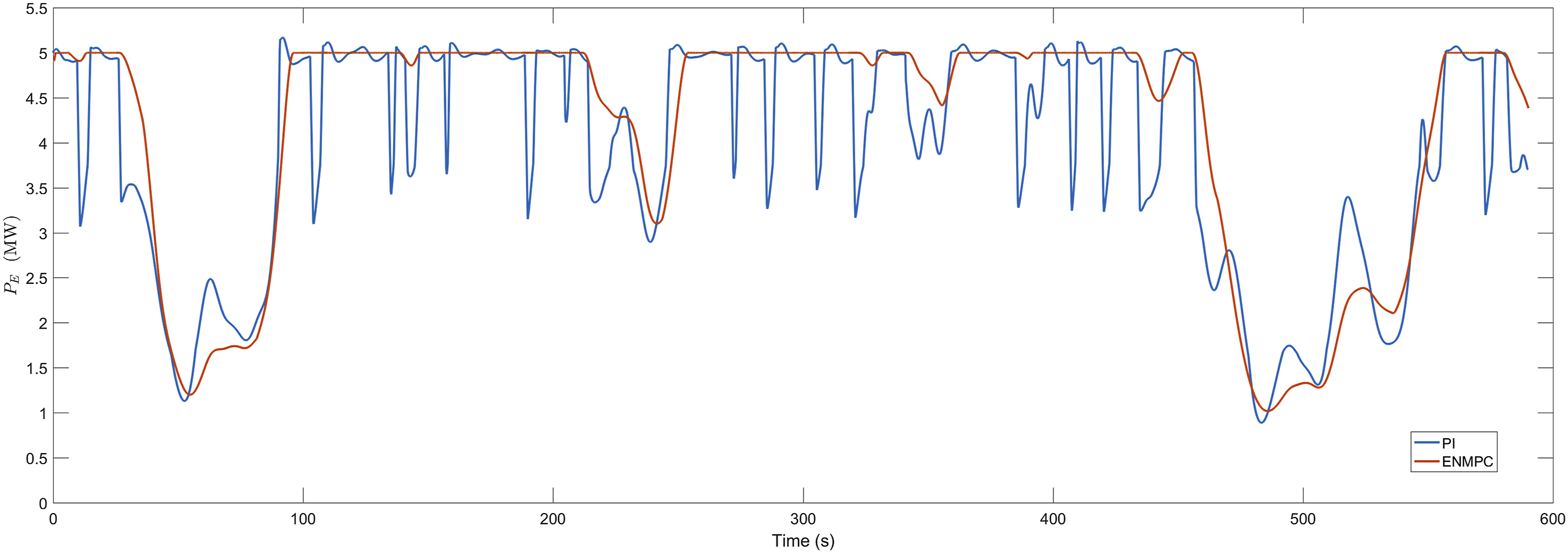
As illustrated in Figure 7, the PI controller method exhibits greater fluctuations in generated power compared to the ENMPC method. The variability in power output with the PI controller indicates less consistent performance under the same wind conditions. In contrast, the results demonstrate that the ENMPC method achieves a more stable power output, with fewer fluctuations.
Moreover, the average power generation with the ENMPC method is higher than that achieved with the traditional PI controller. This increased average power output underscores the effectiveness of the ENMPC method in optimizing energy production. The improved stability and higher average power generation with ENMPC highlight its advantage over traditional control strategies, particularly in managing the balance between performance and fluctuations in power output.
As shown in Figure 7, the generator speed using the proposed ENMPC control method exhibits significantly fewer fluctuations compared to the PI controller method outlined in the NREL technical report. This improved stability in generator speed highlights the ENMPC method’s ability to maintain consistent performance under varying wind conditions.
To facilitate a more comprehensive comparison between the different control strategies, additional parameters are plotted and analyzed. These parameters include generator torque, blade pitch angle, torque rates, and pitch angle rates. These parameters are plotted and compared to evaluate how each control strategy manages different aspects of turbine operation. This detailed analysis will provide a clearer understanding of the advantages and limitations of the ENMPC method relative to traditional control approaches.
As observed in Figure 8, the generator torque fluctuations are significantly reduced with the ENMPC method compared to the PI controller method. This reduction in torque variability is a key advantage of the ENMPC approach, highlighting its effectiveness in maintaining stable turbine operation.
Figure 9 further confirms this observation, showing that the ENMPC method produces the most stable generator torque curve compared to another control strategy. The ENMPC method exhibits minimal changes in generator torque, underscoring its superior performance in managing torque stability and reducing fluctuations.
The analysis of blade pitch angles in Figure 10 highlights that the ENMPC method results in notably smaller fluctuations compared to the PI controller method. This smooth adjustment in pitch angle reflects the ENMPC method’s superior capability in maintaining consistent blade positioning, which enhances overall turbine performance.
In Figure 11, the pitch angle rates, and amplitude of oscillations are examined. The ENMPC method shows much smaller pitch angle rates and reduced oscillations compared to the PI controller. These results indicate that the ENMPC method effectively reduces rapid or excessive pitch adjustments, leading to greater stability and control.
Competing objectives and the generated power values for the PI controller.
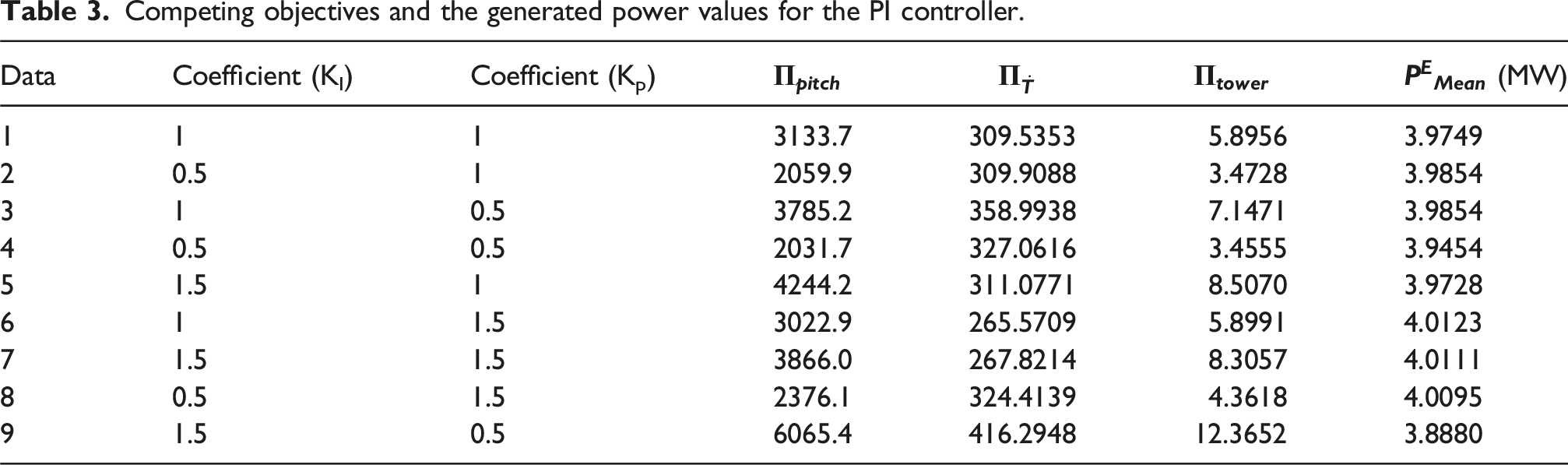
The results clearly illustrate the superiority of the ENMPC method across several key performance metrics. First, the average power output under ENMPC control was significantly higher than that achieved with the PI controller. This enhancement in energy production underscores the effectiveness of ENMPC in optimizing power generation.
Second, the ENMPC method markedly reduced fluctuations in generator speed compared to the PI controller. This reduction leads to smoother turbine operation and less wear on the turbine components, contributing to overall system stability.
Third, the ENMPC scheme achieved much lower variations in pitch angle and generator torque, further decreasing mechanical stress on the turbine. In contrast, the PI controller exhibited larger fluctuations in both generator speed and torque, potentially accelerating the wear and reducing the lifespan of turbine components.
Testing the method for the wind gust
For the effective implementation of the ENMPC method in real wind turbines, it is crucial to test the control strategy under various conditions. A notable gap in our previous research was the absence of testing under wind gust conditions. In this study, this gap is addressed by evaluating the ENMPC method using extreme wind gust profiles defined by the IEC 61,400 standards (Bierbooms et al., 2001; IEC, 1998).
Extreme wind conditions, including peak wind speeds from gusts and rapid fluctuations, are crucial for evaluating the robustness of control strategies. As defined by the IEC 61,400 standard, an extreme operating gust (EOG) represents these challenging conditions. The magnitude of the hub-height gust, Vgust, for standard wind turbine classes follows the relationship provided in (IEC, 1998).
A wind gust condition was introduced at the 170th second of the wind profile, and the results for this scenario are presented in Figures 12 and 13. Generator speed, blade pitch angle, generator torque, and wind profile under wind gust conditions. Results for penalties, generated power, 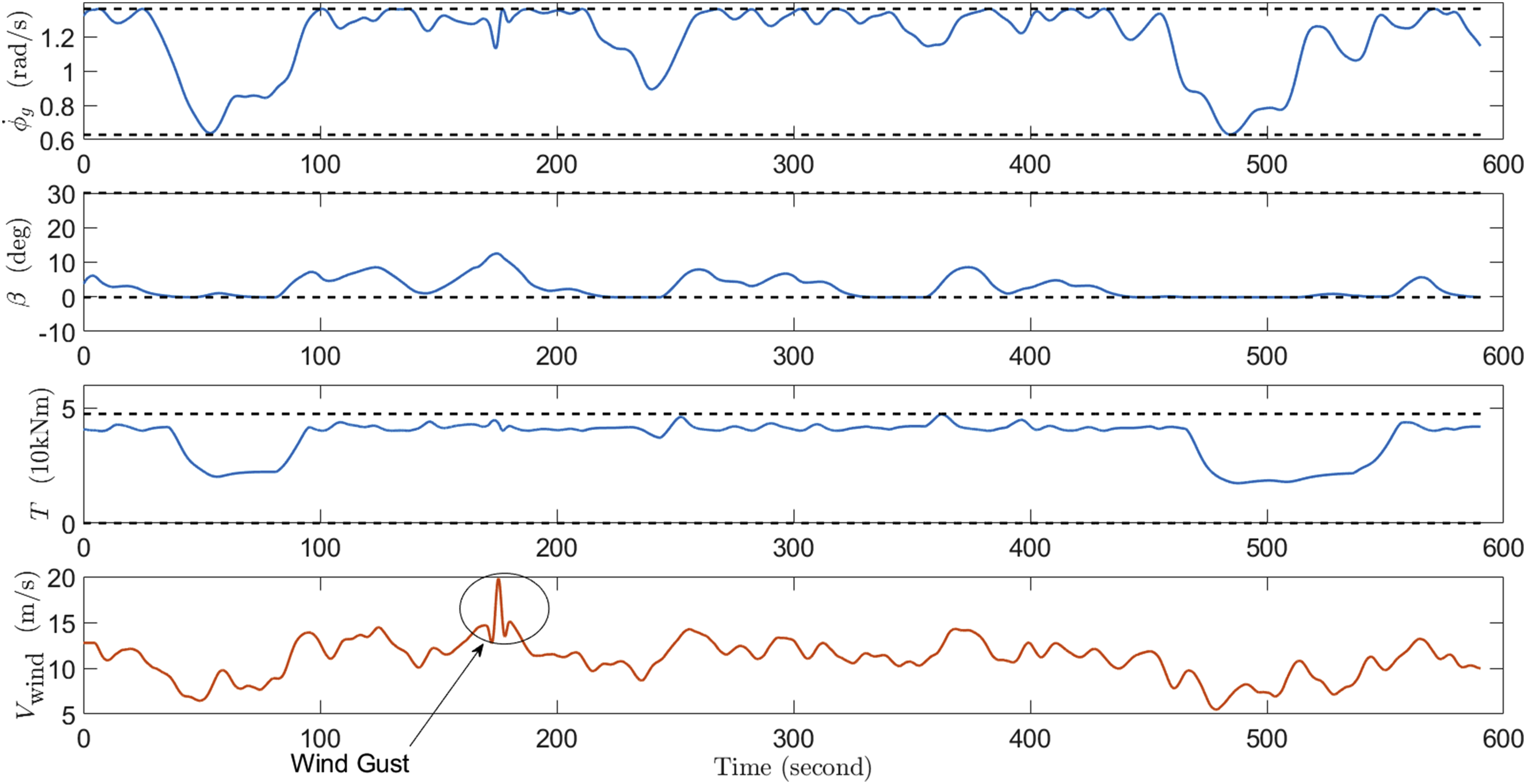
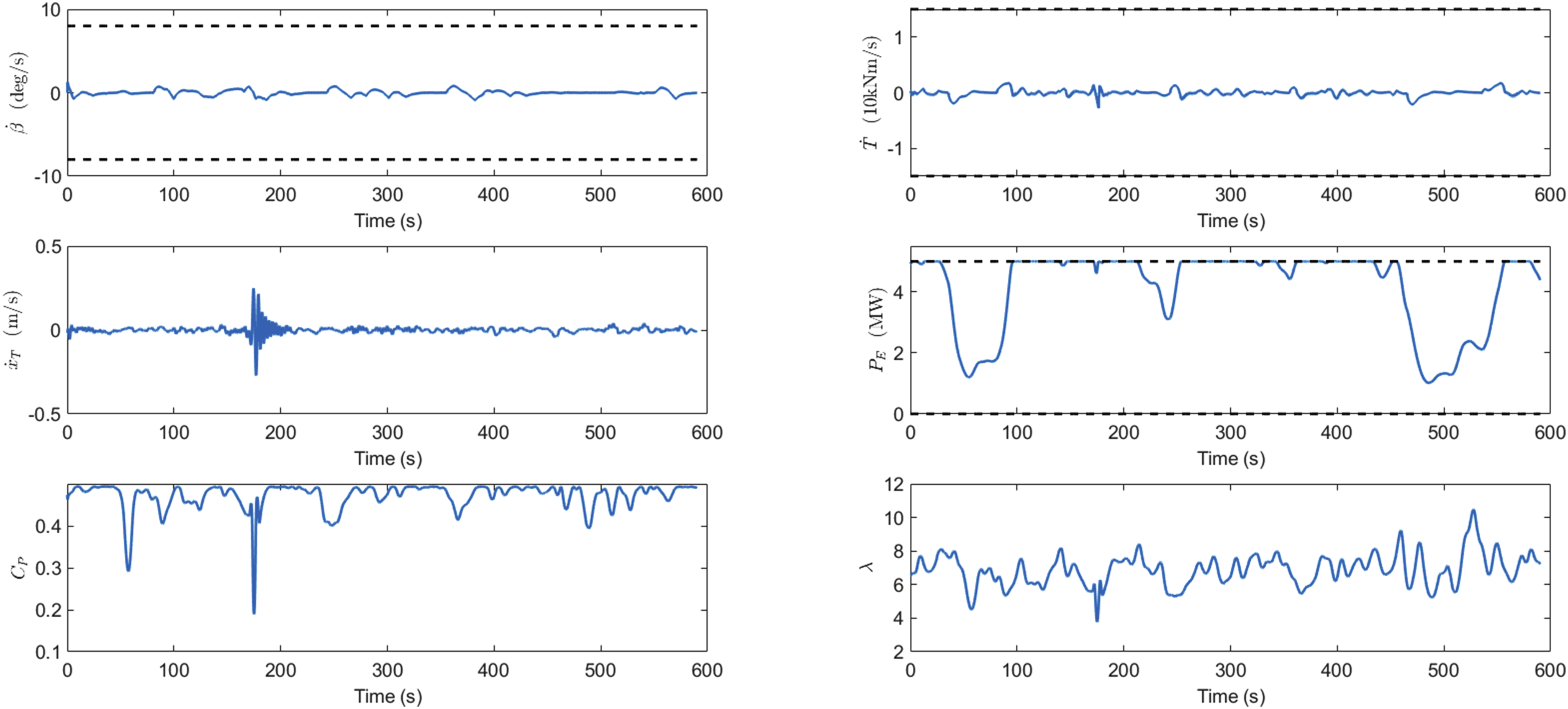
The ENMPC method demonstrates robust performance under wind gust conditions. As shown in Figure 12, the control system effectively manages rapid wind speed changes, maintaining stable generator speed even during gusts. Figure 13 highlights that the ENMPC method successfully controls the pitch angle and torque actuators while enhancing, to improve power generation during gust events.
These simulations confirm that the ENMPC method not only performs well under typical operational conditions but also handles extreme wind events effectively.
Despite all the interesting results obtained, this study has limitations. The main limitations include: (i) the results are based on simulations only and no field measurements were used, (ii) the real-time iteration scheme relies on linearization which may affect accuracy under highly nonlinear conditions, (iii) the evaluation was limited to the NREL 5 MW reference turbine, (iv) in this study, only a limited set of wind conditions is studied and the consistent behavior of the ENMPC method over the full range of relevant wind conditions is yet to be confirmed, and (v) the method has not yet been tested on multi-turbine wind farms. These limitations are acknowledged, and future work directions are suggested accordingly.
Conclusion
Efficient control of wind turbines is one of the main aims of wind turbine (WT) operators. ENMPC is one of the new methods that has been suggested in recent years by researchers for WT control. The main advantage of this method is directly maximizing the system performance, and as a result, the tuning is more straightforward. This study builds upon our previous work by addressing its key limitations: the lack of optimal tuning, the absence of comparison with traditional control methods, and the lack of testing under wind gust conditions. Through optimization of the ENMPC weighting coefficients, a comparison with the PI controller, and testing under extreme wind scenarios, we have demonstrated the superiority of ENMPC in improving energy efficiency and reducing structural loads on wind turbines. The results show that ENMPC, especially with the best selection of its weighting coefficients, can outperform traditional control methods, making it a promising candidate for practical applications in wind turbine control systems and in real conditions. For future work, it is recommended to implement and test the ENMPC method on real, operational wind turbines to further validate their effectiveness in practical conditions. Although the present study is based on simulation using the standard NREL 5 MW reference turbine, the proposed ENMPC framework is designed with practical implementation in mind. Integration into the existing wind turbine SCADA systems is feasible since the algorithm relies only on standard turbine measurements and does not require external sensors. The RTI scheme used in the optimization is compatible with typical industrial control cycles. Future work will focus on hardware-in-the-loop (HIL) testing and field validation to address communication delays, sensor noise, and computational constraints in operational environments.
Footnotes
Author note
All authors have agreed to the submission of this paper and are fully aware of the ethical responsibilities.
Ethical considerations
This study does not involve human participants, human data, or human tissue; thus, ethical approval is not applicable.
Author Contributions
Funding
This research was conducted as part of a research project supported by the Swedish Energy Agency (Project No. P2022-00754).
Declaration of Conflicting Interests
The authors declare that they have no known competing financial interests or personal relationships that could have influenced the work reported in this paper.
Data Availability Statement
The data supporting the findings of this study are available upon request.
Appendix
The nominal values of model parameters.
Parameter
Nominal value
Parameter
Nominal value
502,930
31.5
9284.97
6.215e + 07
1.8785e + 06
8.67637e + 08
5.0255e + 06
2545.75
970,000
5091.5
3.55638e + 07
0.68003