
Abstract
Roughness is one of the most significant parameters in the evaluation of pavement performance. Surface distresses are among the main factors leading to roughness. The collection and evaluation of roughness data require the application of modern equipment such as road surface profilers. In the absence of such equipment, roughness prediction models that are based on surface distresses might provide a desirable assessment of pavement conditions. This research employs the laser crack measurement system (LCMS) to detect and measure surface distresses and roughness along 268 km of primary roads in Iran. Compared with manual survey, LCMS provides maximum detection and measurement accuracy. Based on the LCMS output, distresses with a higher correlation with the International Roughness Index (IRI) were selected as predictors in linear regression models and artificial neural networks (ANN). The models were developed for 10 m and 100 m length sections of the roads under different climate and traffic conditions. The results indicate that the performance of ANN for the 100 m sections with coefficient of determination (R2) of 0.82 is superior to other models. The best case was that of using ANN in 100 m sections for regions with moderate climate and medium traffic levels, with a 0.94 correlation. Satisfactory results in field validation of the models demonstrated that agencies can use other methods of data collection (e.g., manual, right of way [ROW]) to assess the surface distresses and roughness condition of their roads from the developed models with minimum spending and without expensive equipment. Such estimates can be employed to make informed decisions in pavement maintenance programs at the network level.
The maintenance of roads as substantial national assets is of utmost importance. Significant budgets are annually allocated to the maintenance and rehabilitation of roads to keep them at a desirable level of serviceability ( 1 ). The pavement management system (PMS) is a purposeful decision-making tool that helps identify the most effective technical and financial strategies for the maintenance and rehabilitation of roads ( 2 ). The system consists of data and analysis provided by pavement performance evaluation conducted under various climate conditions, with different pavement materials, pavement implementations, and traffic loadings ( 3 , 4 ). Pavement performance is evaluated based on surface distresses such as different types of cracks, deformations, bleeding, weathering, and potholes, as well as roughness and ride quality, skid resistance, and the structural capacity of pavement sublayers ( 5 , 6 ). This evaluation is performed periodically and pavement maintenance and rehabilitation are taken into account based on the results with reasonable timing.
PMSs incorporate roughness as one of the most important indices in pavement evaluation. In addition to its use in the evaluation of pavement conditions, roughness is an index for the level of pavement serviceability, ride quality, and user satisfaction. It is one of the most effective parameters in pavement dynamic response and thus contributes to increased pavement deterioration rates and expenses ( 7 ). Various causes such as subgrade swelling from freeze-thaw cycles, insufficient compaction, poor implementation of pavement layers leading to depression, pavement distress from traffic loading, and climate change lead to pavement roughness. Advanced equipment such as road profilers, which is not always available, is required to measure pavement roughness. As a result, many researchers have attempted to predict roughness reliably based on pavement distresses considering that some such distresses contribute to roughness ( 8 ). several such studies have also attempted to identify the impact of each type of pavement distress on roughness. Some studies have been carried out to establish relationships between the roughness index and one or several other indices. For instance, Dewan and Smith developed a linear prediction model for predicting IRI based on pavement condition index (PCI) in San Francisco Bay asphalt pavements, which was used in the calculation of vehicle operating costs. An adjusted coefficient of determination (R2) of 52% was achieved for their model ( 9 ). Moreover, in a U.S. field study, the correlation between PCI and IRI led to the development of a model between these two indices. These models were developed separately using the functional classification of roads (freeways, arterial roads, collector roads, and local roads) and types of pavement (asphalt, concrete, and composite). The R2 values were 0.56, 0.71, 0.73, 0.74 for road classification models, and 0.82, 0.75, 0.72 for pavement types models, respectively ( 10 ). Another part of these studies addresses the relationship between IRI and one or several other parameters. For example, a study conducted in Nevada ( 11 ) investigated the relationship between surface distresses and roughness. The relationship between IRI and other parameters was calculated by investigating 317 sample units and measuring several parameters including IRI, fatigue cracking percentage and rut depth under the traffic level equals 5 million equivalent single axle loads (ESALs) and considering the initial IRI. In that model, the R2 was determined to be 0.71 and the mean error in the calculation of predicted IRI was 0.107 m/km. Albuquerque and Núñez ( 12 ) developed two IRI prediction models in light traffic roads in northeastern Brazil. ESAL, structural number, and precipitation were considered as predictor parameters in these models. The R2 for the first and second model was 0.87 and 0.94, respectively. In another study in Nigeria ( 13 ), rutting, potholes, and longitudinal and transversal cracks showed a significant impact on IRI. The relationship between the aforementioned parameters and IRI was defined using an equation. In this equation, rut depth, patches by count, and thermal cracks length were used as independent variables and, based on the results, the R2 of 0.78 stated the performance of the model. Gong et al. ( 14 ) used a random forest regression model to predict IRI. The model consisted of 500 trees and 11 predictors. The R2 for this model was obtained as 0.98 which, in comparison with linear regression (R2 = 0.62), indicated a better performance.
Artificial neural network (ANN), which is among the most common modeling methods suitable for regression, pattern recognition, and function estimation, is used in many prediction models of pavement performance. ANNs are calculation models defined based on biological characteristics and attempt to simulate the decision-making process of the human brain. Neural networks consist of a significant number of interconnected processing units known as neurons (Figure 1). With regard to neural interconnections, a neural network can adapt itself to environmental variations and learn new patterns. A neural network can synthesize the inputs using an activation function and return an output. One of the most important neural network structures is multilayer feed-forward neural network. These networks have an input layer, one or several hidden layers, and an output layer. The inputs are processed by neurons in input layers. The output of these processes is transferred to other neurons on the next layers with weights (Wi) and will eventually produce an output. In cases where big input and output datasets are available, the training of a neural network would be possible using a combination of different weights. The backpropagation model is common in neural network training which allows the network to adjust the weights in reverse, distribute errors among different neurons, and minimize error after each iteration ( 15 , 16 ).
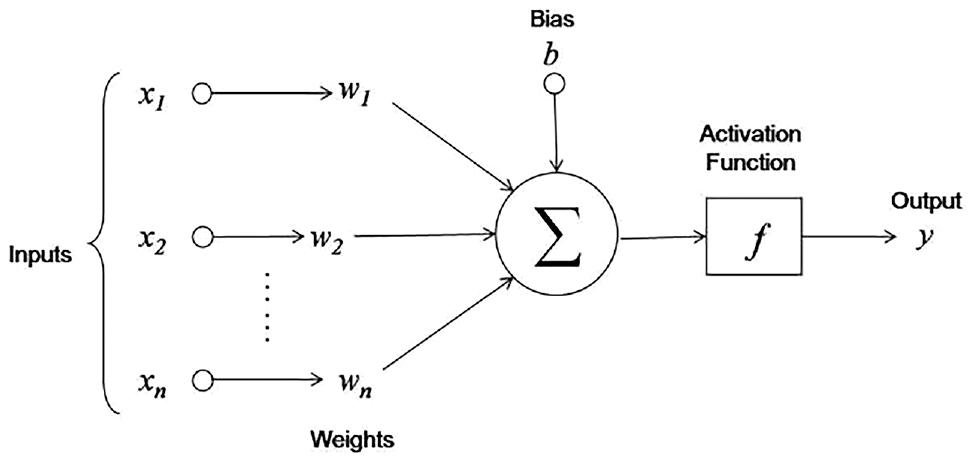
Structure of a neuron. Within a neural network, the inputs, their weights, and a bias are synthesized by an activation function and then output is returned.
Several studies in this field have adopted ANN to predict pavement performance ( 17 – 24 ). Furthermore, research has been carried out to establish a correlation between roughness indices, surface distresses, and pavement structural performance using ANN ( 6 , 25 ).
Various studies have been conducted to develop asphalt pavement roughness prediction models using ANN. Lin et al. ( 26 ) developed a model for predicting IRI from surface distresses such as rutting, alligator cracks, longitudinal and transversal cracks, patching, pothole, and bleeding for which the correlation coefficient was 0.944. Besides, Choi et al. ( 27 ) used an ANN model for predicting IRI using 117 sections collected based on long-term pavement performance (LTPP). In this model, structural number, asphalt content, percent passing no. 200 sieve (P200), pavement thickness, cumulative ESAL, and air void were used to predict IRI for which the correlation coefficient was obtained as 0.87. Chandra et al. ( 28 ) offered models for predicting IRI using linear regression, nonlinear regression, and ANN. In these models, distresses such as potholes, raveling, rutting, cracks, and patching were considered as predictors. In comparison with other models, ANN showed a better performance with an R2 of 0.86. Mazari and Rodriguez used LTPP data to offer a model that accepted pavement age, initial IRI, and ESAL as inputs and applied ANN to predict IRI ( 29 ). Abdelaziz et al. ( 30 ) used regression and ANN models in the 506 section of LTPP to offer models for predicting IRI. In these models, pavement age, initial IRI, rutting deviation, transversal cracking, and alligator cracking were selected as inputs. The results showed that ANN (R2 = 0.75) outperformed the regression model (R2 = 0.57).
Many studies have been carried out to develop roughness prediction models; however, these models have deficiencies. For example, pavement distresses were measured and evaluated using visual surveys. These types of surveys are prone to human error because of differences in the engineering judgment of the survey crew. Therefore, the IRI prediction model would have lower accuracy. Furthermore, in some IRI prediction models, the coefficients of determination were low, which indicated the poor performance of the models. Moreover, in some cases, some distresses with a significant impact in determining IRI (e.g., surface distortions and potholes) were not considered in the models, leading to poor model performance. In other studies, although the performance of the developed models was noteworthy, model generalization was not desirable because of the use of a limited number of sample units and observations.
In light of the abovementioned studies, this research intends to identify the impact of surface distresses on roughness in asphalt pavements and to develop IRI prediction models based on these distresses in Iran. In this study, 268 km of primary roads with a broad distribution (22 roads with a minimum length of 5 km and a maximum length of 30 km) were evaluated using a laser crack measurement system (LCMS) under various climate and traffic conditions. Unlike manual surveys, which involve human error and various judgments in identifying distresses, LCMS is accurate in detecting and measuring distresses and IRI simultaneously. Therefore, a high quality and accurate database is provided that consists of reliable data detected by computational algorithms, which helps develop IRI prediction models with higher accuracy. Another advantage of this study, in comparison with previous research, is the continuous collection of pavement distresses and roughness, which means it is not based on a limited number of sample units. Considering the continuous collection of data, a comprehensive database would be available, which would accurately represent a statistical population of all roads in Iran. Also, the concurrency in collecting distresses and roughness data prevents errors derived from local overlapping of data and would lead to a high accuracy data analysis. Furthermore, the broad distributions of road sections will take into account climate conditions and traffic levels. Therefore, one of the goals of this study is to develop IRI prediction models for various climate and traffic conditions. After the collection of field data using LCMS, the first phase of the analysis would be applied to identify the types of distress with a higher impact on roughness and incorporate them in the development of the models. IRI prediction models based on surface distress would then be developed using linear regression and ANN models under various climate and traffic conditions. In cases where equipment for measuring pavement roughness is neither available nor affordable, applying these models can help road agencies assess the condition of road networks by measuring limited types of distresses, as well as saving time and cost in data collection, with simple and regular data collection methods, for example, visual surveys, image processing for images captured by any type of camera (drone, panorama, ROW), and prediction models of distress propagation. This statement can be fulfilled by validating the models in the field using the mentioned methods and subsequently comparing the outcomes with actual IRI. Additionally, other agencies can adopt the results reported by these models to facilitate making decisions for the treatment of their road networks.
Methodology
This study was conducted on the primary roads of Iran under various climate and traffic conditions. In this section, the data collection procedure is explained initially. The selected roads are then categorized, based on climate and traffic conditions, and the collected data are preprocessed and analyzed statistically so that the most effective parameters are identified for modeling. Then, the IRI prediction models are developed using linear regression models and ANN, and lastly, the models’ performance is validated in a practical situation with manual survey. Figure 2 shows the consecutive steps of the study.
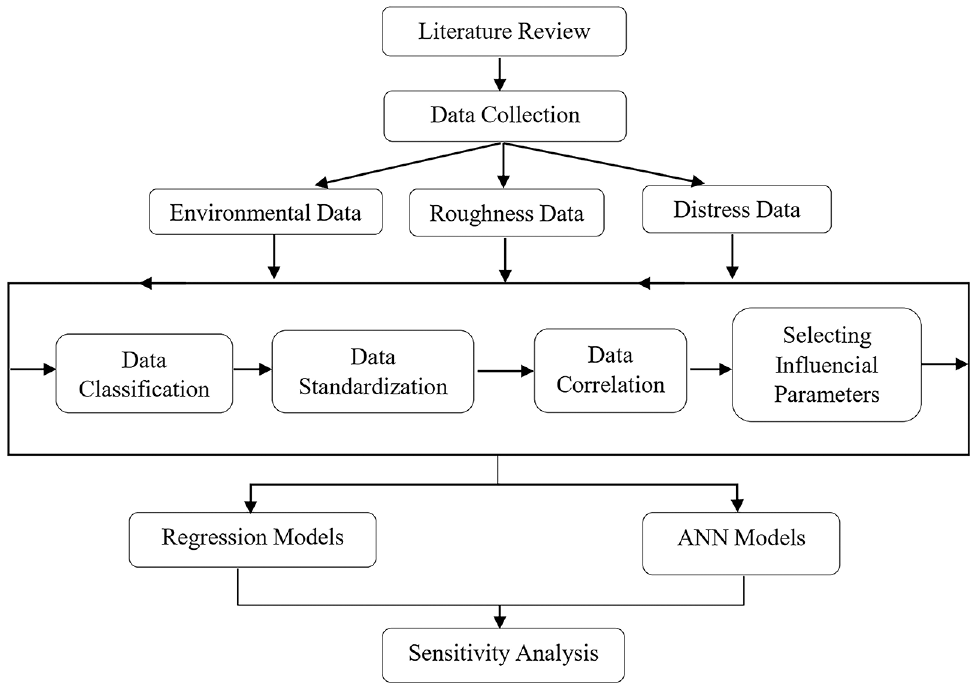
Research procedure. The consecutive steps of the research are illustrated. First, comprehensive background of previous studies; then, the research methods are presented respectively including data collection, data classification, data standardization, data analysis, model development, model validation, and sensitivity analysis. Finally, the research results are discussed and concluded.
Data Collection
Roughness and surface distress data were collected using LCMS on 22 primary roads of Iran with a total length of 268 km and under various climate and traffic conditions in 2019. The selected roads had not been maintained or rehabilitated since the date of construction or their last rehabilitation. LCMS uses laser beams and high-speed cameras to produce three-dimensional (3D) transversal and longitudinal profiles of pavement surface with 5 mm longitudinal resolution, 1 mm transversal resolution, and 0.5 mm range accuracy ( 31 ). This system automatically collects and analyses surface distresses and IRI based on ASTM and AASHTO standards ( 32 – 41 ). It covers 3.7 m of the lane width and can detect distresses at speeds up to 100 km/h. Common pavement distresses (e.g., roughness, crack types, rutting, raveling, potholes, and lane-markings) are detected by measuring laser intensity and range and combining them to make a 3D image of the surface. Figure 3 shows the LCMS mounted on a vehicle.

The laser crack measurement system (LCMS) is mounted on a vehicle and uses laser beams and high-speed cameras to produce three-dimensional transversal and longitudinal profiles of pavement surface with 5 mm longitudinal resolution, 1 mm transversal resolution, and 0.5 mm range accuracy. It covers 3.7 m of lane width and can automatically detect and collect distresses and profiles at speeds up to 100 km/h based on ASTM and AASHTO standards.
There is a wide variety of climate conditions in Iran. Based on average annual temperatures, the climate of the country is classified into three categories, namely warm, moderate, and cold, as shown in Table 1 ( 42 ). Furthermore, as indicated in Figure 4, the geographical location of the start and end points in each road are depicted based on climate conditions. The traffic classification of roads is based on the ESAL and is categorized into light, medium, and heavy groups, as shown in Table 2 ( 43 ). More information about the selected roads is presented in Table 3.
Climate Classification of Iran

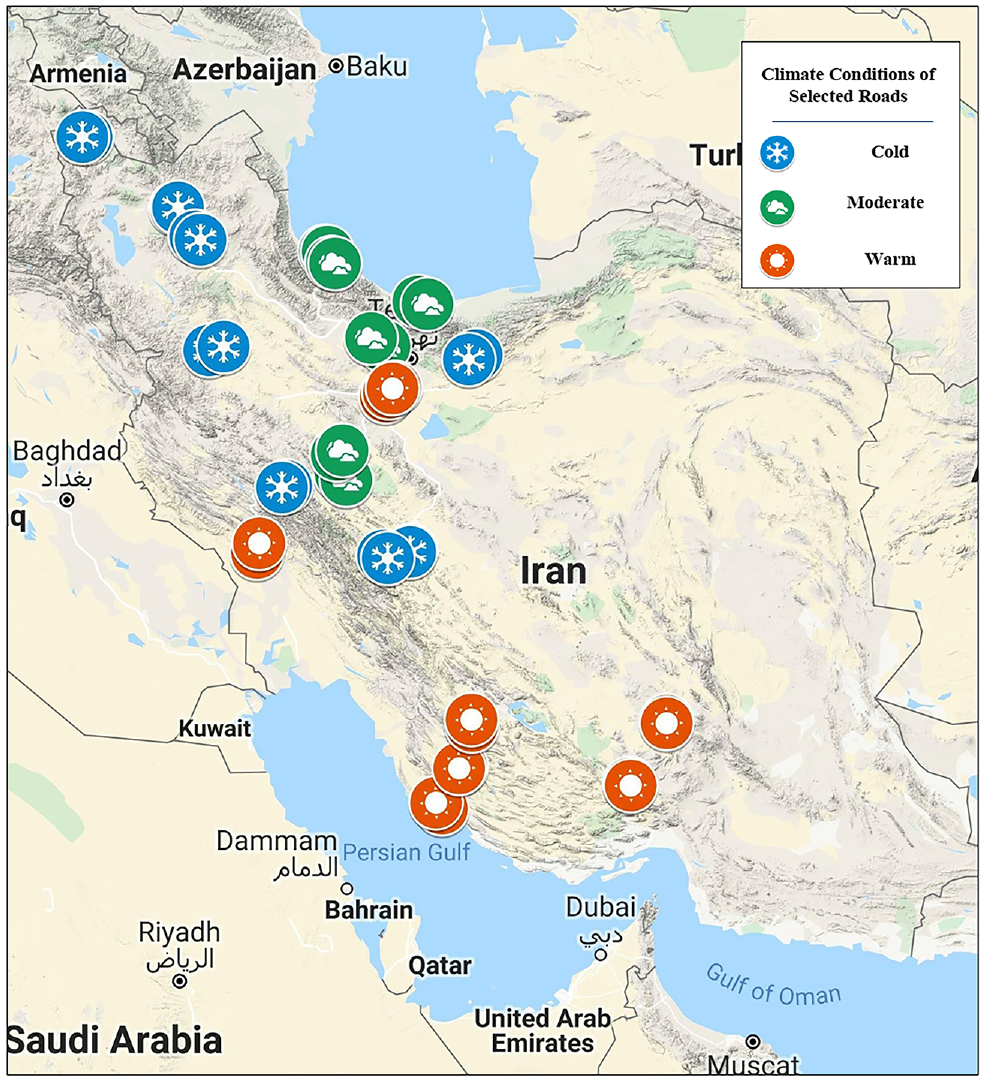
Climate conditions of selected roads. The start and endpoints of the selected roads were depicted based on climate conditions. It can be observed that the southern part of Iran mainly has a warm climate while the weather in the west is often cold and the northern part has a moderate climate.
Traffic Classification of Primary Roads

General Information on Selected Roads

Data Preparation
The collected raw data for each 10 m section of the road were saved and prepared for the preliminary process. For this purpose, the processing software developed by the manufacturer of the LCMS was used. The estimated time required for processing the data using a relatively high-end desktop computer is 15 km per hour ( 31 ). Figure 5a shows a processed image of a 10 m section of asphalt pavement captured by LCMS and Figure 5b shows the actual image of the pavement captured by a camera. The output of the preliminary processing is detailed information on various types of cracks, roughness, rutting, macrotexture, and potholes for each 10 m section. In addition to this data, which was collected in 2019, the IRI data of the selected roads collected immediately after their construction or their last rehabilitation were also added to the existing data as the initial roughness. Table 4 describes all the collected distresses and indices of this research.
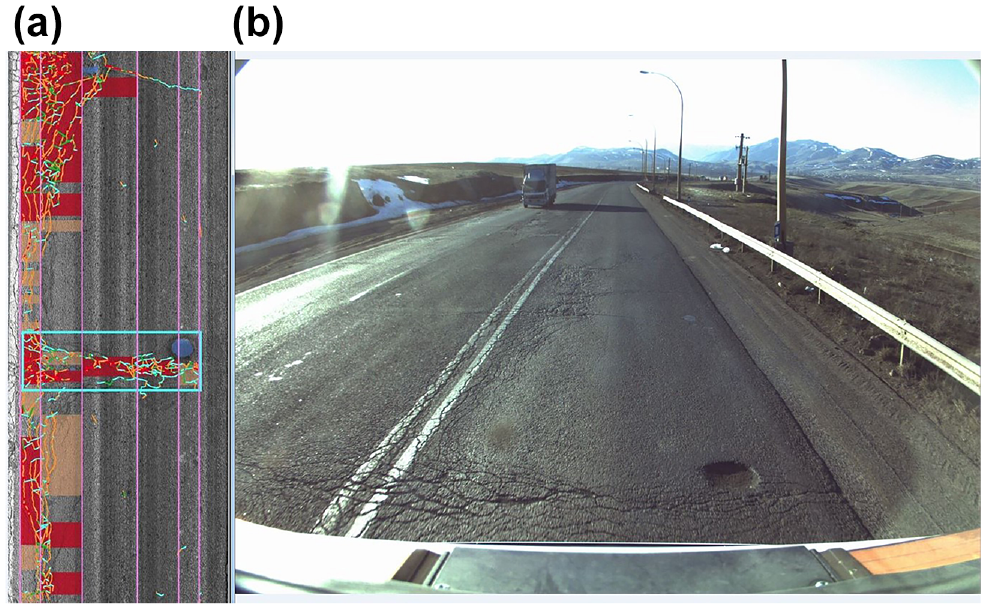
Processed image of a 10 m section captured by laser crack measurement system (LCMS) (left), and the actual image of the pavement captured by camera (right). The LCMS successfully identified the pattern cracks, that is, alligator cracks with medium (orange-colored) and high (red-colored) severities, linear cracks (longitudinal and transverse cracks) based on their widths and lengths, and a pothole specified with a blue color area.
Collected Parameters in Research

Note: IRI = International Roughness Index.
In addition to data on 10 m sections and with regard to previous instruction manuals, distresses and roughness in 100 m length sections were also considered ( 45 ). L_Long, L_Trans, TransLong, and S_Pothole in 100 m sections were calculated by summation of 10 m section values for each parameter, and the remaining were averaged in 100 m sections. Therefore, to develop the prediction model of IRI, data were categorized into two groups of 10 m and 100 m sections. Data refinement was carried out in multiple steps to standardize the given data. In the first step, data collected on speed bumps, rumble strips, road studs, bridge spans, and so forth, were removed from 10 m sections. Thus, the total number of 10 m and 100 m sections reached 26,463 and 2,646, respectively. To minimize the errors in developing the prediction model, the outliers were detected and removed. In this regard, the interquartile method was employed and the descriptive statistics for each parameter were provided. Subsequently, the first and third quartile (Q1, Q3) of the datasets were identified and the difference between these two values constituted the interquartile range (IQR) which stated the middle 50% of the data. Typically, the quantities more than Q3+1.5(IQR) and less than Q1−1.5(IQR) in each parameter’s dataset are specified as outliers. Therefore, this procedure was applied to all parameters and the outliers were removed from the data ( 46 ). In correspondence of the parameters, however, a few amounts of data were recognized as outliers on the statistical basis which were allowed to remain in datasets as the probability of their occurrence was significantly high. Finally, the total number of sections reached 19,794 for 10 m mode and 2,546 for 100 m mode.
Data Analysis and Model Development
After data preparation, the Pearson method was used to calculate the correlation between parameters. The results were expressed in the Pearson correlation coefficient and p-value. The Pearson correlation coefficient shows the value and direction of the correlation between two parameters and varies between −1 and 1. The closer the Pearson coefficient is to 1 or −1, the stronger the relationship between the two parameters. The Pearson coefficients of each two parameters at the 95% confidence level, considering the statistical significance of the relationship (p-value < 0.05), are presented in Table 5 ( 47 ).
Pearson Correlations between Parameters
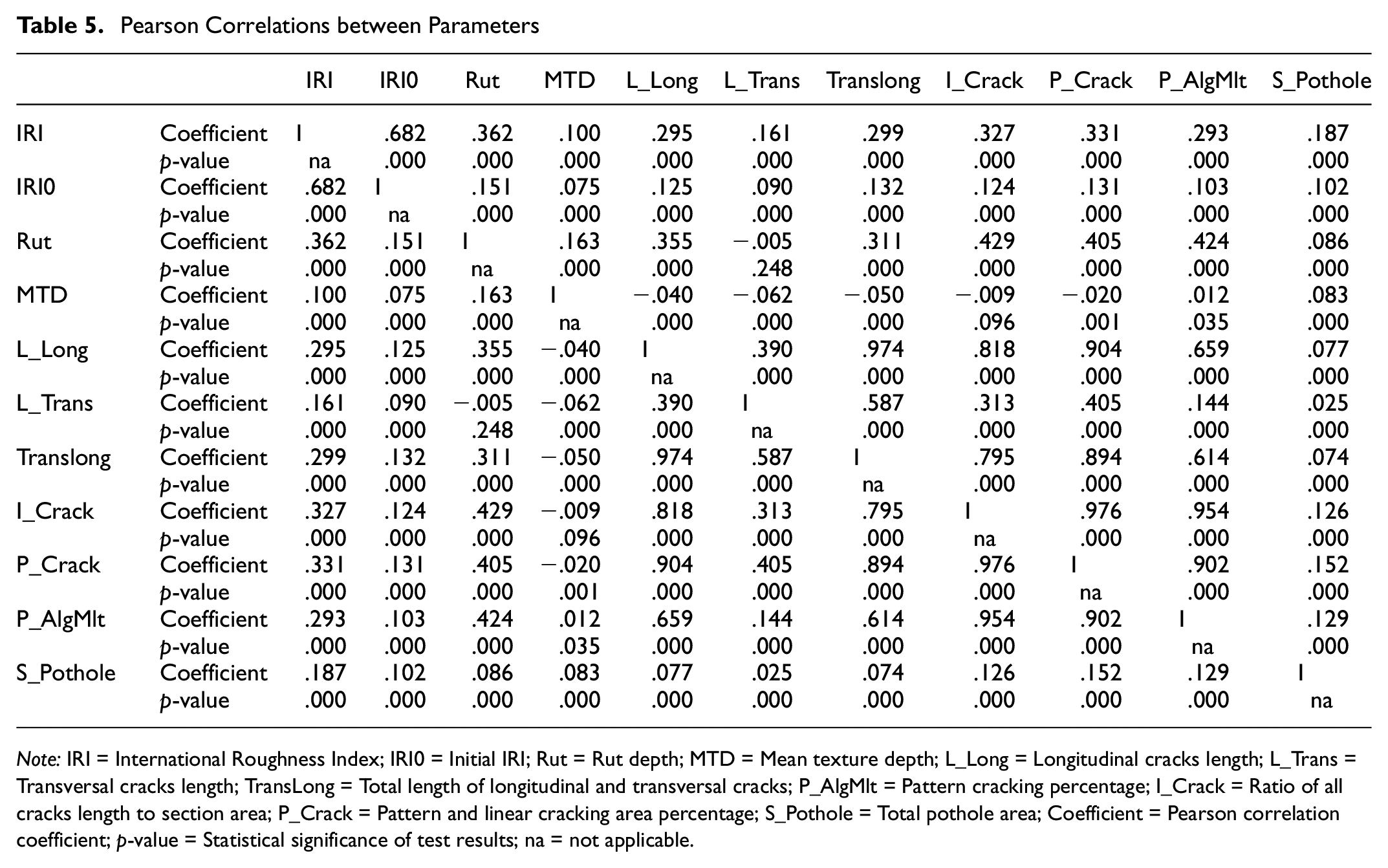
Note: IRI = International Roughness Index; IRI0 = Initial IRI; Rut = Rut depth; MTD = Mean texture depth; L_Long = Longitudinal cracks length; L_Trans = Transversal cracks length; TransLong = Total length of longitudinal and transversal cracks; P_AlgMlt = Pattern cracking percentage; I_Crack = Ratio of all cracks length to section area; P_Crack = Pattern and linear cracking area percentage; S_Pothole = Total pothole area; Coefficient = Pearson correlation coefficient; p-value = Statistical significance of test results; na = not applicable.
As can be noted from Table 5 and the evaluation of Pearson correlation results between IRI and other distress parameters, all the relationships are statistically significant at the 95% confidence level (p-value < 0.05). There is also a direct relationship between IRI and other parameters. IRI0 (0.682), Rut (0.362), P_Crack (0.331), I_Crack (0.327), Translong (0.299), P_AlgMlt (0.293), S_Pothole (0.187), L_Trans (0.161) and MTD (0.100) in decreasing order have the highest to lowest correlation with IRI. IRI0, Rut, P_Crack, and S_Pothole were selected out of all the parameters as the ones which were more effective in the IRI prediction model. As indicated in Table 5, because of the high correlation between cracking parameters, and to prevent multicollinearity among independent variables in model development ( 47 ), the P_Crack was selected among cracking parameters (I_Crack, P_Crack, Translong, L_Long, L_Trans, P_AlgMlt) for two reasons. First, according to its definition, it is representative of all types of cracking; and second, among all cracking parameters, it has the highest correlation with IRI.
After identifying the effective distresses according to IRI, model development was performed for the 10 m and 100 m section modes. Figures 6 and 7 illustrate the correlation graphs between IRI, Rut and P_Crack in 100 m section mode classified in traffic levels and climate conditions, respectively.
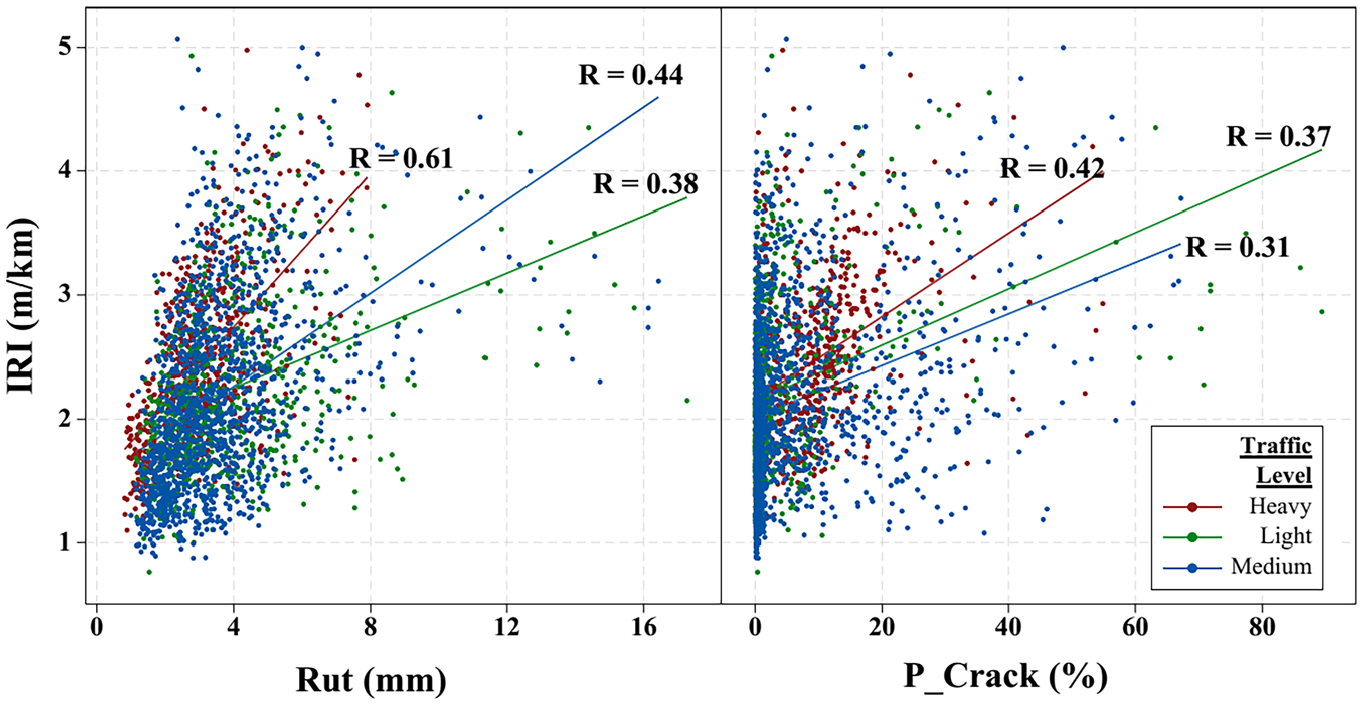
Correlations between IRI, Rut, and P_Crack parameters by traffic level. The graph shows the relationship between IRI and rut depth (Rut) on the left side and the correlation between IRI and the percentage of pattern cracking (P_Crack) on the right side in 100 m sections. The data for Heavy, Light, and Medium traffic levels are specified with red, green, and blue colors, respectively. The strength of correlation between parameters in each category is indicated by lines in the specified colors of each category.Note: IRI = International Roughness Index; Rut = Rut depth; P_Crack = Pattern and linear cracking area percentage.
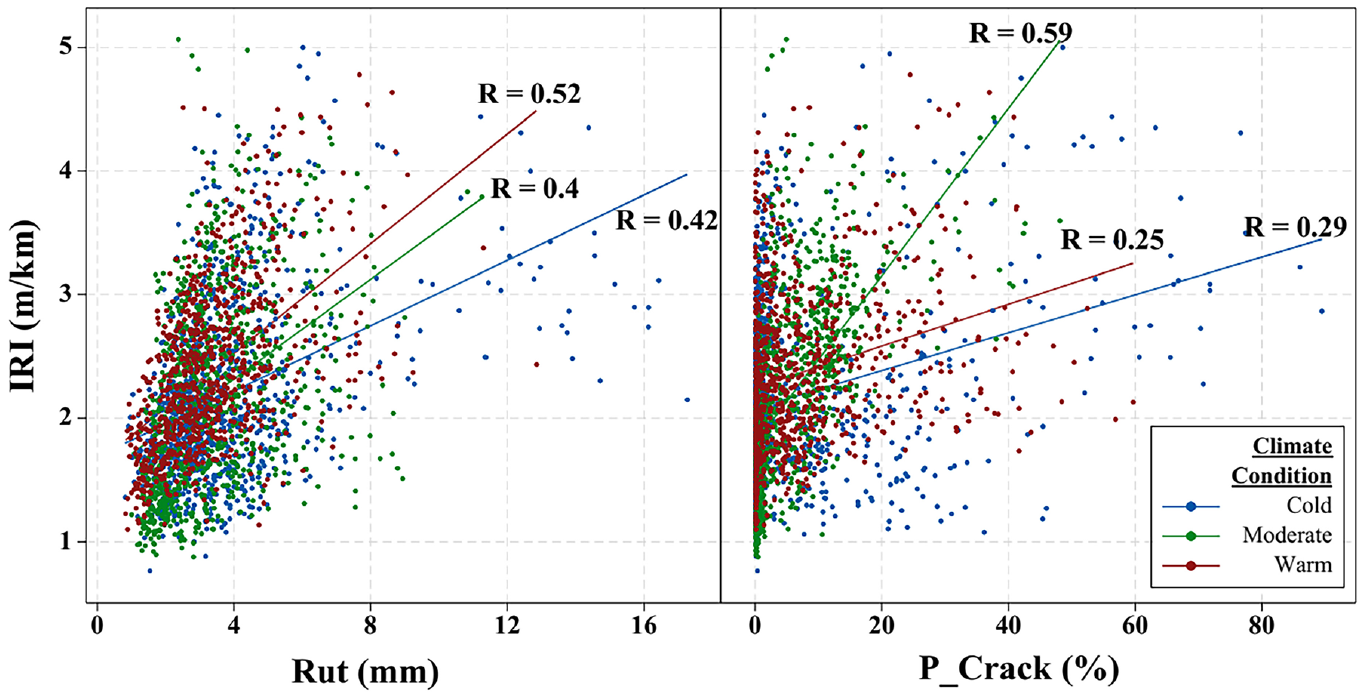
Correlations between IRI, Rut, and P_Crack parameters by climate condition. The correlation graphs between IRI versus Rut and IRI versus P_Crack in various climate conditions in 100 m sections are given on the left and right sides of the figure, respectively. The data for cold, moderate, and warm climate are specified with blue, green, and red colors, respectively. The strength of correlation between parameters in each category is indicated by lines in the specified colors of climate conditions.Note: IRI = International Roughness Index; Rut = Rut depth; P_Crack = Pattern and linear cracking area percentage.
As depicted in Figure 6, the relationship of IRI with rut depth (Rut) was stronger in heavy traffic loading than medium and light levels, indicating that pavements were prone to rutting by the passage of heavy vehicles. Moreover, the relationship between IRI and percentage of pattern cracking (P_Crack) indicated quite similar correlation in all traffic classes with the heavy traffic above the others, which could maintain that the heavier the traffic loading, the more cracking will appear on the pavement surface. Figure 7 illustrates the correlation between IRI, Rut, and P_Crack in various climate conditions. It can be observed that the relationship of IRI with Rut had superior correlation in warm climate followed by moderate and cold conditions. This implies that rutting is more likely to appear on pavements with increasing temperature of air and asphalt. According to Figure 7, P_Crack had the highest correlation with IRI in moderate climate conditions, which indicates that more cracking was observed in moderate than in warm or cold climate conditions.
Linear Regression Models
Given the acceptable level of correlation between IRI, IRI0, Rut, P_Crack, and S_Pothole, linear regression models were developed for predicting IRI for 10 m and 100 m sections (Equation 1). In these models, IRI is the dependent variable, and S_pothole, P_Crack, Rut, and IRI0 are independent variables. A summary of results of the linear regression model and the coefficients of the parameters is shown in Tables 6 and 7, respectively.

Details of Regression Models and Analysis of Variance (ANOVA)
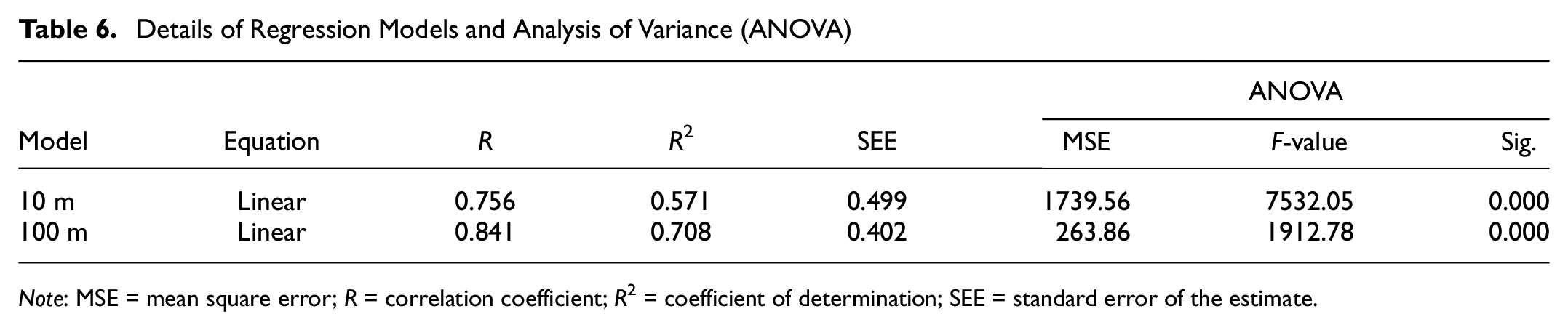
Note: MSE = mean square error; R = correlation coefficient; R2 = coefficient of determination; SEE = standard error of the estimate.
Coefficients of Independent Variables in Regression Models
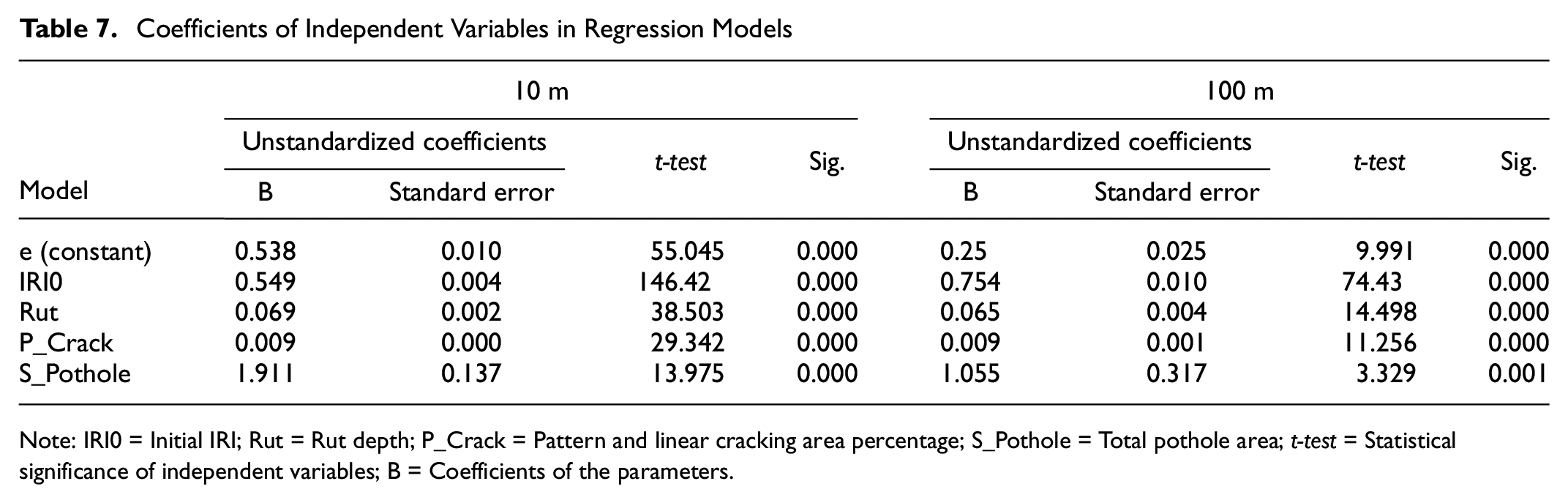
Note: IRI0 = Initial IRI; Rut = Rut depth; P_Crack = Pattern and linear cracking area percentage; S_Pothole = Total pothole area; t-test = Statistical significance of independent variables; B = Coefficients of the parameters.
Because of the large amount of data gathered in this research and the complexity of the mathematical relationship between IRI and other variables, developing a nonlinear regression model for IRI prediction (which might have higher accuracy compared with linear regression models) is not feasible. Therefore, it was decided to use ANN to find the relationship between independent variables and IRI ( 48 ).
ANN Model
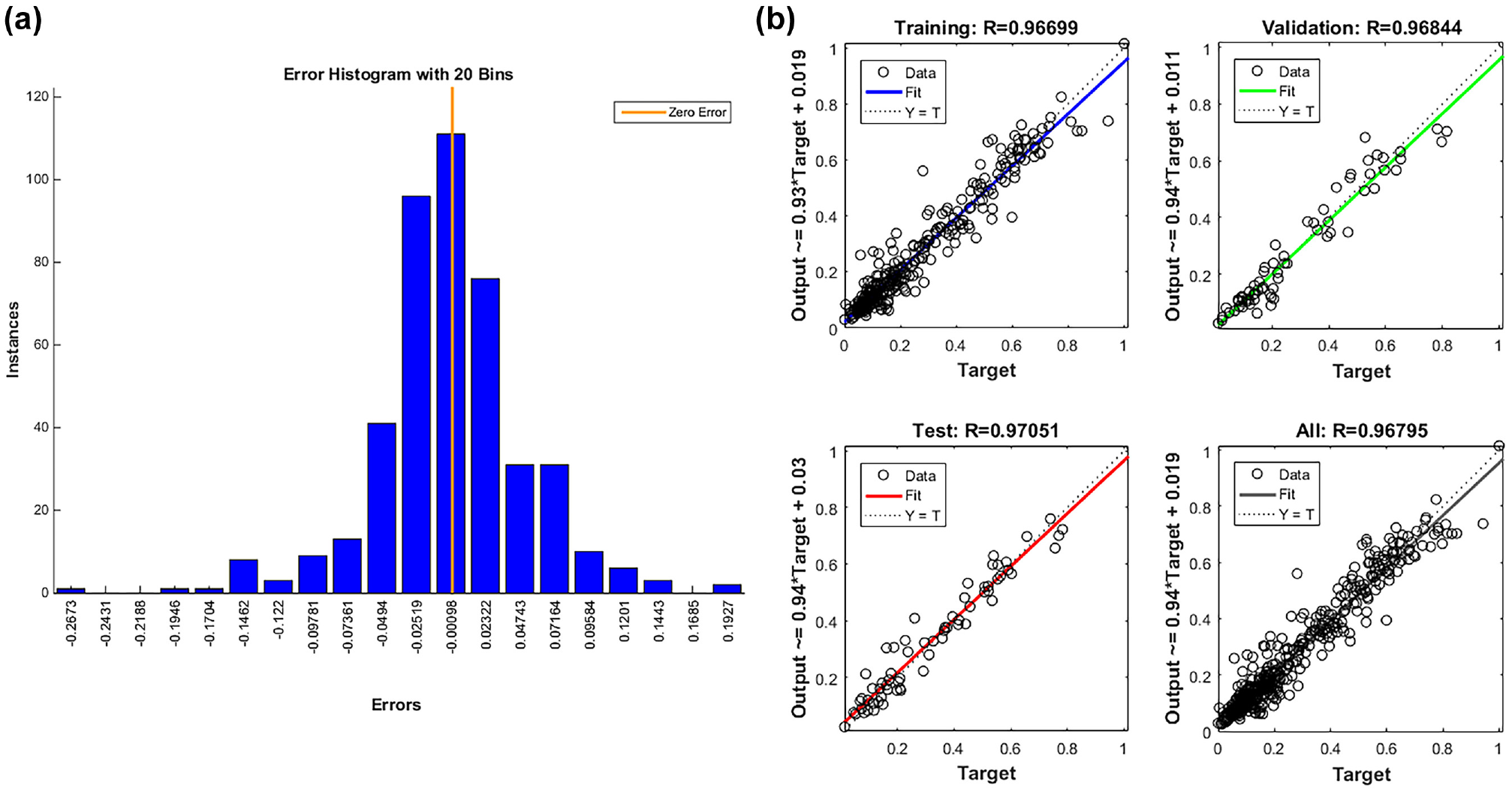
In this research, MATLAB as an authentic programming software was employed to develop the ANN. A two-layer feed-forward neural network was selected to develop the IRI prediction model. The network was trained using the backpropagation learning method and the Levenberg-Marquardt algorithm. The performance of the neural network model was evaluated by calculating the mean square error (MSE), R, and R2. IRI0, Rut, P_Crack, and S-Pothole were the inputs and IRI was considered as the target parameter. The activation function of the hidden layer was tangent hyperbolic sigmoid (tansig) and the transfer function for the output layer was linear (purlin). For developing ANN models in both 10 m and 100 m section scenarios, 70% of the data was used for training, 15% for validation, and 15% for testing. Before training, all data were normalized, so that they all have the same scale. The numbers of 10 m and 100 m sections were 19,794 and 2,546, respectively. The ANN models were designed for five to 20 neurons in the hidden layer. The best results were achieved with five neurons for 10 m sections and 10 neurons for 100 m sections. The performance of the ANN models is summarized in Table 8. Figure 8 shows the error histogram and the regression between the predicted output and target data for 100 m sections.
ANN Results of IRI Prediction for 10 m and 100 m Sections
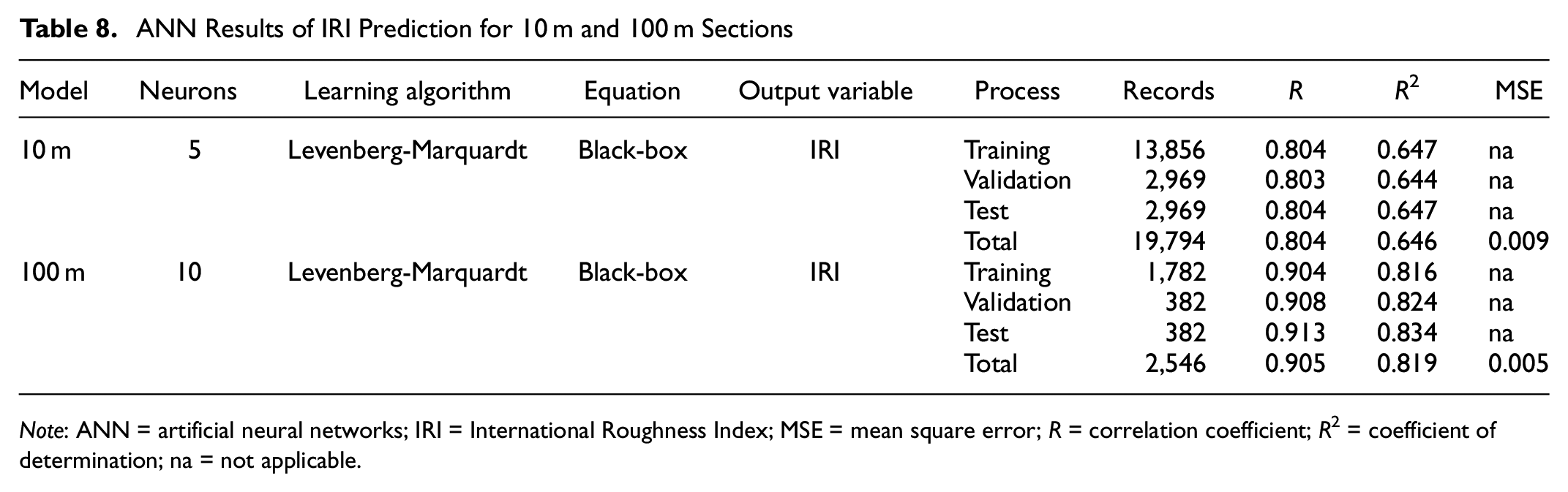
Note: ANN = artificial neural networks; IRI = International Roughness Index; MSE = mean square error; R = correlation coefficient; R2 = coefficient of determination; na = not applicable.
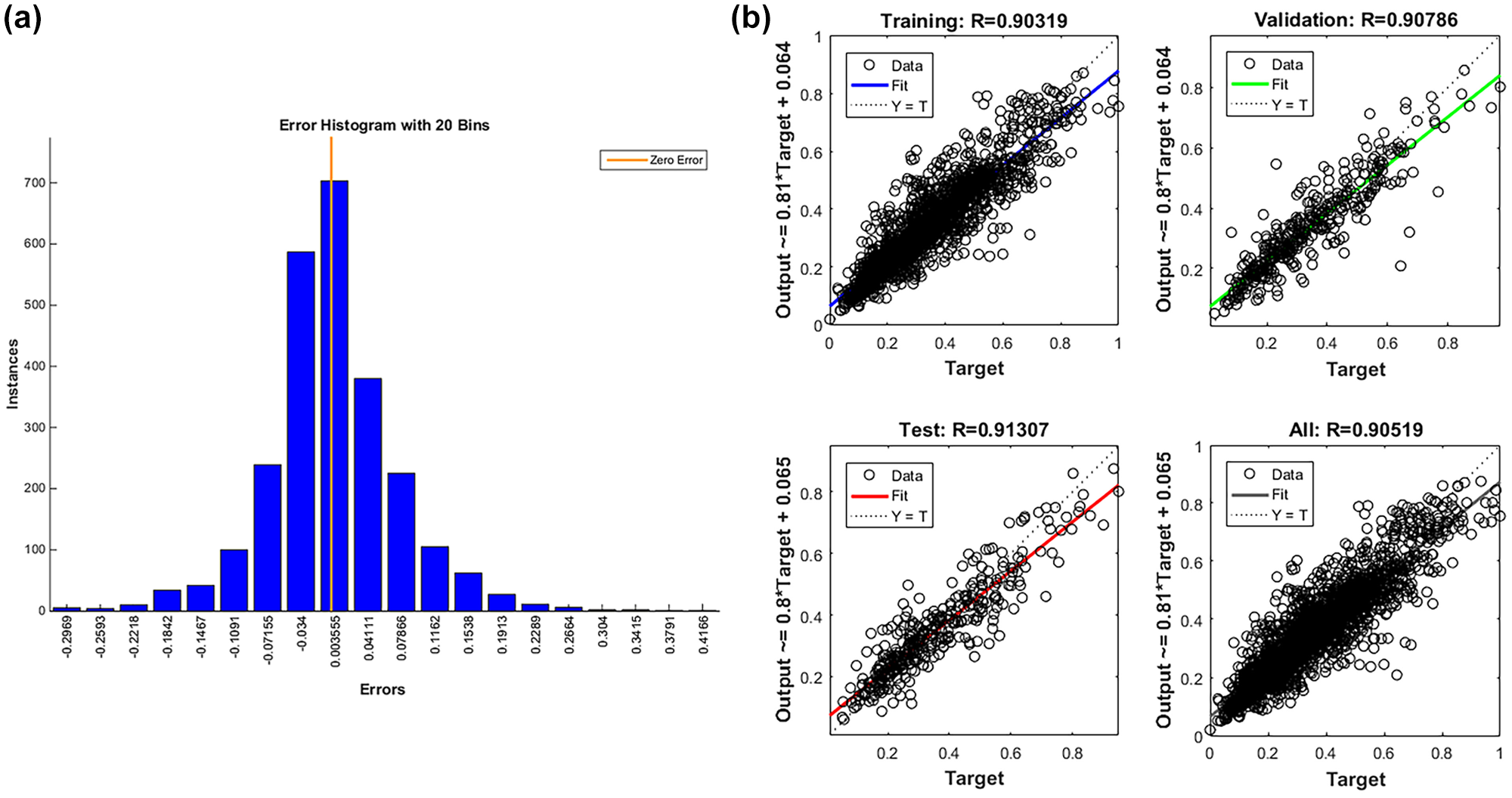
(a) Error histogram for artificial neural network (ANN) model for 100 m sections. The histogram indicates the distribution of errors with 20 bins that originated from the difference between the predicted International Roughness Index (IRI) and actual IRI in 100 m sections. (b) ANN model performance for 100 m sections. The regressions between ANN outputs and target values in four stages of training, validation, test, and overall demonstrate the performance of the IRI prediction model in each step.
IRI Prediction Models in Various Climate and Traffic Conditions
Climate and traffic conditions are among the main factors that affect the performance of pavements. As explained above, roads in Iran are subject to various climate conditions and traffic loadings; consequently, in this study, efforts have been made to choose roads that comprehensively represent the variety of climate and traffic conditions. With regard to the climate classification in Table 1, the climate zones in this study consist of warm, moderate, and cold. and the traffic levels based on ESAL are categorized into heavy, medium, and light, according to Table 2. The ANN models for 100 m sections were developed under three different climate conditions, three different traffic loadings, and nine combinations of traffic and climate conditions. Table 9 shows the results of ANN models for all types of traffic loading and climate conditions. Figure 9, a and b , depicts the ANN results for the combination of moderate climate conditions and medium traffic loading.
Artificial Neural Network Results for 15 Combinations of Climate and Traffic Conditions
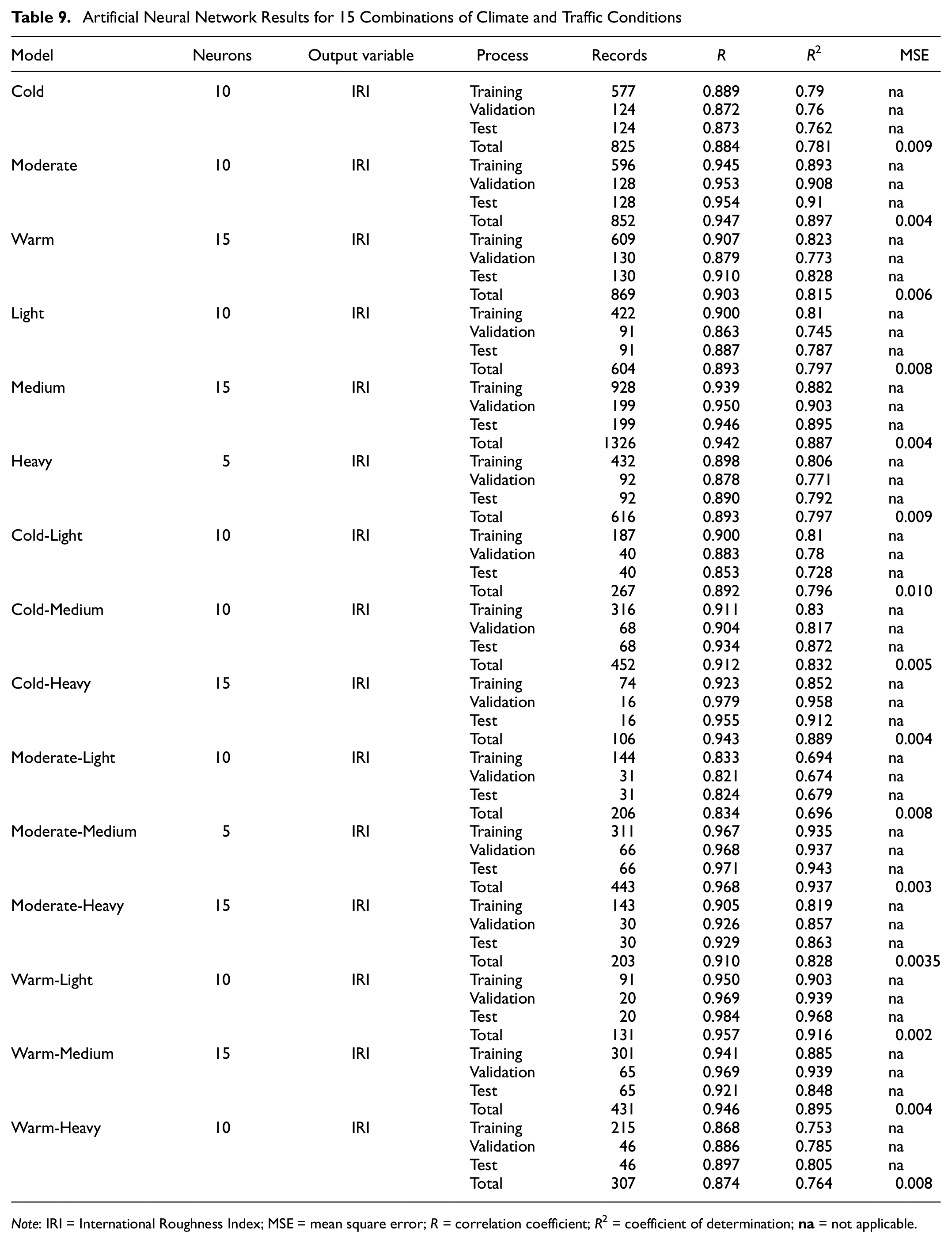
Note: IRI = International Roughness Index; MSE = mean square error; R = correlation coefficient; R2 = coefficient of determination;
Results of artificial neural network (ANN) model for moderate climate condition and medium traffic loading: (a) ANN error histogram and (b) ANN performance. The error histogram in a condition of moderate climate and medium traffic was provided with 20 bins in 100 m sections. The performance of ANN in this mode was evaluated by regression between the predicted and actual International Roughness Index (IRI) in four stages of training, validation, test, and overall.
Model Validation
To examine the significance of the developed models with data gathered by other methods such as manual survey, ROW, and so forth, two roads that were not considered in the modeling procedure, with moderate climate and medium and heavy traffic levels, were investigated based on manual survey. About 2 km of each road, 4 km collectively, were inspected for distresses such as rut depth, lengths of transverse and longitudinal cracks, areas of alligator and block cracks, and pothole areas, as shown in Figure 10. The initial IRI data collected at the end of reconstruction or rehabilitation by an automated, high-speed profiler (RSP) were acquired from the road agency. Moreover the actual IRI of each road was obtained by operating a profiler in the field. The input parameters of IRI0, Rut, P_Crack, and S_Pothole were prepared to evaluate the overall ANN model of 100 m sections and two models in moderate climate-medium traffic and moderate climate-heavy traffic conditions where data were collected. The correlations between the predicted IRI and the actual IRI in all three models are shown in Figures 11 and 12.
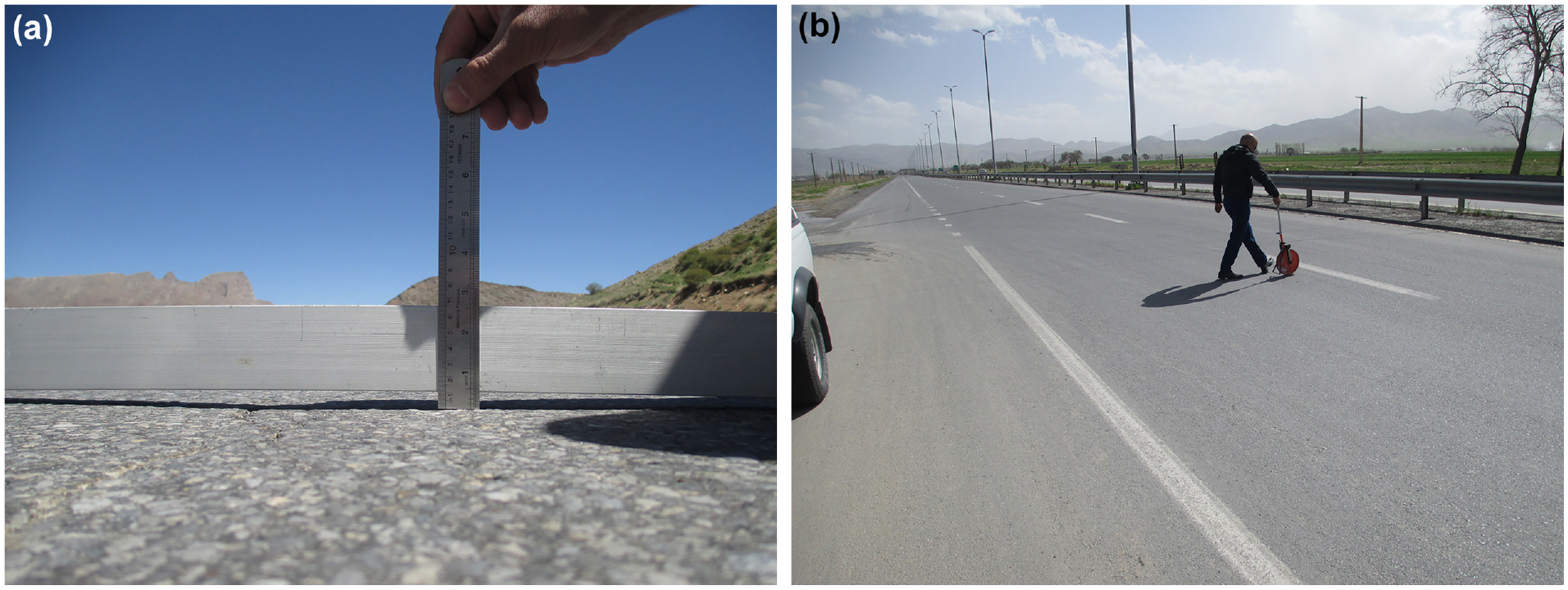
Data collection with manual survey for model validation: (a) rut depth measurement and (b) measuring the length of linear cracks. Distress data collection was performed manually in the field to validate the performance of the developed models with other methods of collecting data. Image (a) shows the method of measuring rut depth using a straightedge and a ruler and image (b) illustrates a rater measuring linear cracks with a measuring wheel in the field.
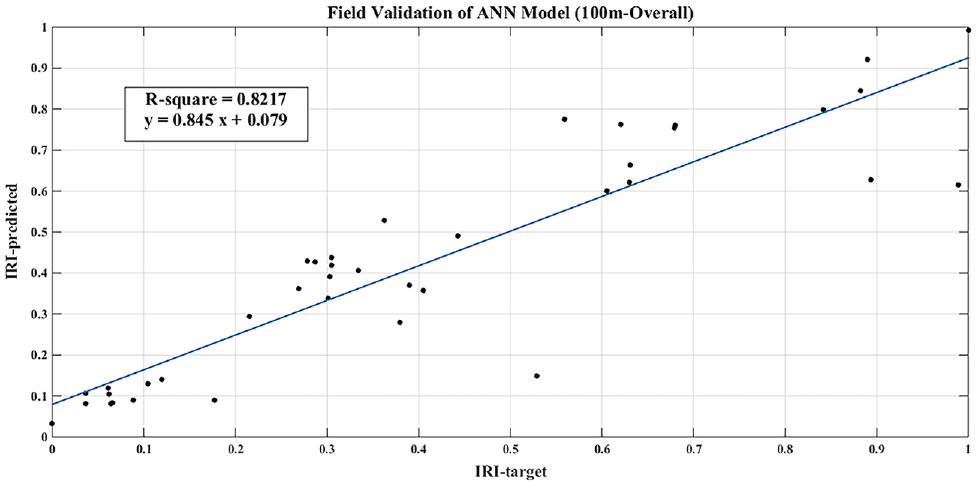
Validation result of artificial neural network (ANN) model in 100 m section. The regression shows the correlation between predicted International Roughness Index (IRI) obtained by the overall ANN model with manually collected data in 100 m sections and actual IRI. The performance was evaluated by the coefficient of determination (R2).

Validation result of artificial neural network (ANN) model: (a) moderate-medium condition and (b) moderate-heavy condition. The performance of the ANN models in two climate-traffic modes of moderate-medium and moderate-heavy were investigated by establishing a regression between predicted International Roughness Index (IRI) with manually collected data and actual IRI. The coefficients of determination indicate the performance of the models.
Discussion
The results of regression and ANN models yielded valuable information on the prediction of IRI from distresses such as Rut, P_Crack, S_Pothole, and initial IRI (IRI0). As shown in Table 6, the performance of the linear regression model for 10 m and 100 m sections was evaluated based on R, R2, and standard error of the estimate (SEE). Moreover, the one-way analysis of variance (ANOVA) was used to control the significance of the regression model. Furthermore, the impact of IRI0, Rut, P_Crack, and S_Pothole as independent variables on IRI as a dependent variable was shown for 10 m and 100 m sections at the 95% confidence level. Based on the ANOVA results shown in Table 6, both of the regression models of the 10 m and 100 m sections were statistically significant at the confidence level of 95%. Table 7 shows the independent parameter coefficients for the regression models of the two modes of data. In both models, the t-test was conducted to investigate whether the independent variables are statistically significant. The value of t for all independent variables at the 95% confidence level was significantly higher than the critical t. Therefore, the regression models were statistically significant. The p-value for all variables was less than 5%, which indicated the significance of the variables in regression models. As seen in Table 6, the performance of the regression model was acceptable with regard to the coefficient of determination and SEE for 10 m sections (R2 = 0.571, SEE = 0.499) and 100 m sections (R2 = 0.708, SEE = 0.402). Because of the higher R2 and lower SEE for 100 m sections in comparison with 10 m sections, the performance of the regression model for the 100 m sections was better than that for the 10 m sections.
Table 8 shows the performance of the ANN model for the two modes of data based on R, R2, and MSE. The R2 and MSE for 10 m sections (R2 = 0.646, MSE = 0.0091) and 100 m sections (R2 = 0.819, MSE = 0.0054) illustrate the performance of ANN in predicting IRI. Comparing ANN performance in the two scenarios, the model for 100 m sections outperformed that for 10 m sections as indicated by higher R2 and lower MSE. Based on the results shown in Tables 6 and 8, and comparing the performances of the linear regression model and the ANN model, it can be concluded that the ANN model for 100 m sections showed the best performance among all of the models.
Concerning the acceptable performance of ANN in predicting IRI in 100 m sections, the method was used to develop ANN models for 15 different combinations of climate conditions and traffic loading. The ANN performance results are shown in Table 9 for 15 classes of climate and traffic conditions (three classes of climate conditions, three classes of traffic levels, and nine classes for the combinations of climate and traffic conditions). The results indicate that the performance of ANNs was acceptable in all classes. The best performance of the model was achieved under moderate climate conditions (R2 = 0.897) and medium traffic loading (R2 = 0.887) and the best combinational performance was achieved for the moderate-medium combination (R2 = 0.937). Figure 13 illustrates the performance of ANN based on R2 in different classes.

Bar chart of coefficient of determination (R2) in various climate conditions and traffic levels. The bar chart depicts the R2 value in 16 modes of climate and traffic conditions to compare the performance of artificial neural network models in each mode.
To investigate the impact of the input parameters of the model on IRI, a sensitivity analysis was performed on the ANN model inputs, as shown in Figure 14. The ANN response for the predicted IRI was determined by changing only one parameter each time and keeping the rest constant. The analysis was conducted on all of the input parameters one by one to measure their sensitivity. Because of standardization of the data, all of the parameters were dimensionless and, therefore, comparable. Based on the results, IRI0, S_Pothole, Rut, and P_Crack had the highest to the lowest levels of sensitivity by order.
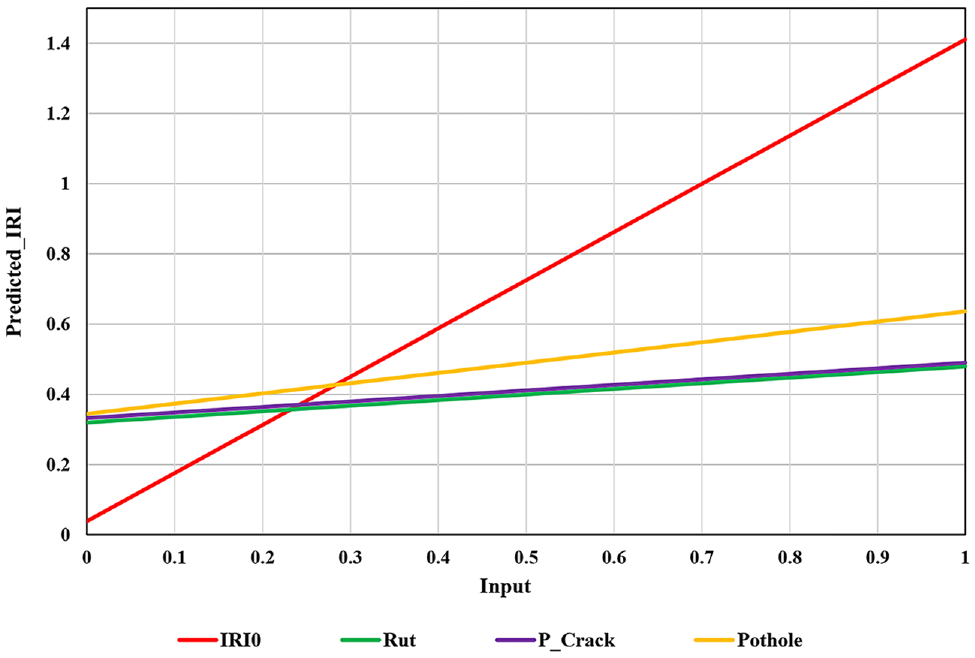
Sensitivity analysis of input parameters in 100 m sections in the artificial neural network model. The effectiveness of the input parameters on the predicted International Roughness Index (IRI) was investigated in 100 m sections. The inputs are standardized between 0 and 1 so that the impact on IRI can be simply distinguished.
With regard to Figure 14, the initial IRI had a direct and notable impact on current IRI. Therefore, road authorities should pay special attention to the ride quality of their roads during and after construction or rehabilitation to minimize the growth rate of roughness. The graph also shows the y-intercept of 0.3 for Rut, P_Crack, and S_Pothole curves which indicates the significant impact of these parameters on IRI when they occur. Additionally, by increasing each parameter, a sensible variation in IRI can be observed. Consequently, conducting routine and preventive maintenance of pavements such as pothole filling, crack filling, fatigue crack repair, and rut repair can improve road roughness.
Lastly, the developed models were validated in the field situation by considering manually collected distresses as inputs of the models. With regard to Figure 11, which indicates the regression between predicted and actual IRI for the overall ANN model of 100 m sections, with manually collected data the model had an acceptable performance with R2 of 0.82. As shown in Figure 12, the results of two other ANN models in moderate climate-medium traffic and moderate climate-heavy traffic conditions, with R2 of 0.94 and 0.93 respectively, demonstrate the satisfactory performance of the models with manual survey data.
Conclusion
In this research, the effectiveness of pavement distresses collected by LCMS on pavement roughness represented as IRI under various climate conditions and traffic loadings was investigated. In comparison with other similar research, this study used automated and accurate equipment (LCMS) to continuously collect high quality data and provide a comprehensive database for developing the IRI prediction models. Following that, the IRI prediction models were developed using these data and their applicability was examined with manually collected distresses. The results illustrated that the ANN models were able to predict IRI satisfactorily. Although these models were generated with LCMS-based data, they seem to have acceptable performance by using parameters collated with manual methods of data collection (visual survey, ROW, and so forth). Therefore, the findings of this study may help road agencies to inspect their road networks using limited equipment and with lower cost compared with the application of expensive equipment. Identifying the most effective distresses following by predicting the IRI with proper significance can be beneficial for road agencies, especially those in developing countries that need to have the highest efficiency in conducting pavement condition surveys at the network level with limited budgets. This study was a preliminary step in developing a prediction model of IRI based on distresses collected automatically and accurately by LCMS. In future studies, prediction models can be developed for a more extensive range of climate conditions, or environmental parameters such as water table depth, freeze-thaw cycles, and moisture content can be considered as independent vaiables in the model. Moreover, by conducting a more in-depth study on distress behavior under various climate conditions and traffic loadings, more influential distresses in each condition can be selected exclusively for developing the IRI prediction model.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: M. Fakhri, S. M. Karimi; data collection: S. M. Karimi, J. Barzegaran; analysis and interpretation of results: M. Fakhri, S. M. Karimi, J. Barzegaran; draft manuscript preparation: M. Fakhri, S. M. Karimi, J. Barzegaran. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.