
Abstract
This study explored, in consideration of cultural differences, how explanation timing and permission of the automated vehicle’s (AV’s) actions affected drivers’ trust in, preference for, and anxiety about the AV. We conducted a video-based online survey study with 118 participants in different cultural contexts. Each participant experienced four conditions in highly automated driving: (1) no explanations, (2) explanations given before, or (3) after the AV acted, and (4) the option for drivers to approve or disapprove the AV’s action after explanations. We found that context cultures influenced drivers’ trust in and preference for the AV only when explanations were provided. Participants with higher-context cultures had higher trust in and preference for the AV. Such influence was augmented especially when the AV asked for permission after explanations. Our results have important implications for the design of in-vehicle interfaces. We suggest that AV manufacturers should incorporate cultural differences into AV explanation interface design for global use.
Keywords
Advancements in artificial intelligence, computer vision, and deep learning have accelerated the speed to bring automated vehicles (AVs) to human daily life. Although we are still years away from fully or highly automated vehicles, partially automated vehicles (e.g., Tesla) and conditionally automated systems (e.g., Honda Sensing Elite) are already on the market. AVs have the potential to provide our society with safer, more efficient and sustainable driving. However, people have negative opinions of AVs, including the lack of trust, preference, and high anxiety, which serve as barriers to widespread acceptance of AVs ( 1 , 2 ).
Researchers have proposed explanations of AV actions to facilitate better interactions between drivers and AVs (3–6). For instance, Koo et al. ( 4 , 5 ) found that providing why only information (e.g., obstacle ahead) led to more positive emotional valence and preference for AVs compared to how only information (e.g., car is braking). In relation to the explanation timing, Körber et al. ( 7 ) found that explanations provided after takeover actions did not significantly influence drivers’ trust in the AV. Du et al. ( 8 ) found that AV explanations presented before the AV takes action led to more trust and preference and not necessarily less anxiety or workload. Given the explanations, Du et al. ( 8 ) also investigated the effects of autonomy level, that is, whether the AV asked the participants for approval after explanations. They found that asking for permission after explanations led to lower trust and preference ratings compared to explanations only conditions.
Considering the globalization of the world, culture becomes an important variables to study the interaction between human and automation. Existing literature has studied how cultural factor—nationality influenced individual’s behaviors and attitude in human-automation interaction. For instance, Sherman et al. ( 9 ) investigated attitudes of pilots from 12 nations in relation to flight deck automation and found that there were significant national differences in attitudes on all items, especially the preference and enthusiasm for automation. Bartneck et al. ( 10 ) found that participants from the United States had the most positive attitude toward the interaction with robots, followed by Japanese, while the participants from Mexico had the most negative attitude. In the context of automated vehicles, Hergeth et al. ( 11 ) investigated drivers’ trust in highly automated driving after takeover quests. The findings showed that Chinese drivers reported significantly higher automation mistrust than German drivers, although both of the groups had significantly higher trust after experiencing the system than before. Meanwhile, Schoettle and Sivak ( 12 ) measured public opinion about automated vehicles in six countries. They found that respondents in China and India had more positive initial opinions of automated vehicles in relative to the respondents in the United States, the United Kingdom, and Australia. To be specific, Chinese and Indian respondents were willing to pay the most for the AV and had greater interest in having it as their own vehicles. On the other hand, Japanese respondents were willing to pay the least for the AV and had more neutral initial opinions about it.
In addition to simply using the nationality categorization, it is necessary to use the underlying cultural dimensions to study the cultural effects. Researchers, such as Geert Hofstede and Edward T. Hall, have proposed different culture theories to study intercultural communication. Hofstede and Bond’s ( 13 ) five cultural dimensions include Power Distance, Uncertainty Avoidance, Individualism versus Collectivism, Masculinity versus Femininity, and Long versus Short-term Orientation. Hall and Hall’s ( 14 ) context culture theory states that people in low-context culture society have a more direct, explicit, and greater verbal communication style, whereas people in high-context cultures expect a more indirect, implicit, and highly nonverbal communication style. Also, societies in high-context cultures have centralized social structure and authority, and people at the top of the group take more responsibility. Although cultural context shift and involve, most Asian countries, such as China and South Korea, are generally recognized as high-context cultures, and the United States and some European nations such as Germany are categorized as low-context cultures.
Researchers have employed the high/low-context cultures to study the communication style in human-computer interaction. For example, Pflug ( 15 ) evaluated the influence of cultural dimension of contextuality in the computer-mediated communication. Their findings showed that people in high-context cultures used more nonverbal communication such as emoticons in online forums compared to people in low-context cultures. Meanwhile, Li et al. ( 16 ) conducted a cross-cultural study on human-robot interaction and found that cultural differences existed in participants’ likeability, engagement, trust, and satisfaction with robots. Participants from low-context cultures had significantly decreased engagement when the task involved lower sociability. Similarly, Wang et al. ( 17 ) and Rau et al. ( 18 ) found that participant trusted social robots more and were more likely to adopt their recommendations when they behaved in more culturally normative ways. To be specific, Chinese participants, who were in high-context cultures, evaluated the robots as being more likable, trustworthy, credible, and complied with robots’ decisions more when robots communicated implicitly compared to American ( 17 ) and German participants ( 18 ).
Despite the importance of culture to effective communications between humans, we know little if any about how culture may influence communications between drivers and their AVs. This is particularly problematic when we consider the existing literature on how cultural factors influenced driver’s attitude and opinions of AVs ( 19 ). To fill the research gap, this study aimed to investigate how AVs communicate with drivers from different culture backgrounds about action reasoning. Specifically, we were interested in identifying the effects of cultural backgrounds (i.e., high- or low-context cultures) on drivers’ trust in, preference for, and anxiety about the AV with different explanation timing and autonomy levels. The results will have implications for the design of AV explanation interfaces in highly automated driving across cultures.
Method
Participants
A total of 118 participants with different nationalities were recruited in the study. As shown in Figure 1, there were 32 Chinese, 35 Indians, 44 Americans, and 7 people from other countries. Participants have lived in the United States for a range of .5 to 22 years. There were 50 female and 68 male participants. The average age is 23.25 years with standard deviation .40.
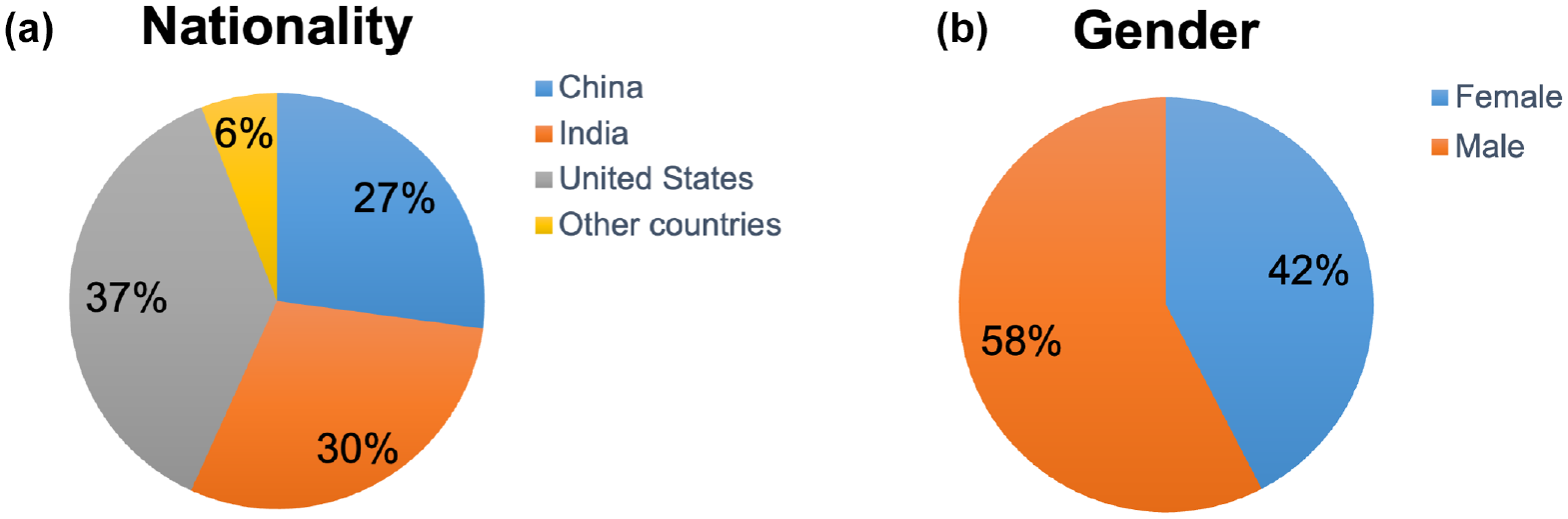
Participants’ demographic information by (a) nationality and (b) gender.
We used a 5-point Likert scale to measure participants’ experience with advanced driver assistance systems (1 to 5 indicated “never”, “once”, “periodically”, “frequently”, and “always”, respectively). Participants’ average experience values were 1.9. Participants were screened for their driver’s license status, motion sickness history, basic computer skills, hearing and vision acuity. These criteria ensured that participants could imagine themselves as drivers of automated vehicles and respond to explanation information in the experiment. Participants were paid $10 for 30-min lab study.
Apparatus
A video-based online survey platform was developed using the Qualtrics software (Qualtrics, Provo, UT). The videos were taken from a first person driving perspective using a high-fidelity driving simulator (Figure 2). The driving simulator was programmed to be at SAE Level 4 ( 20 ), where the vehicle control, navigation, and traffic response were undertaken by the AV. There was no need for the driver to actively monitor the environment in the automated driving mode.
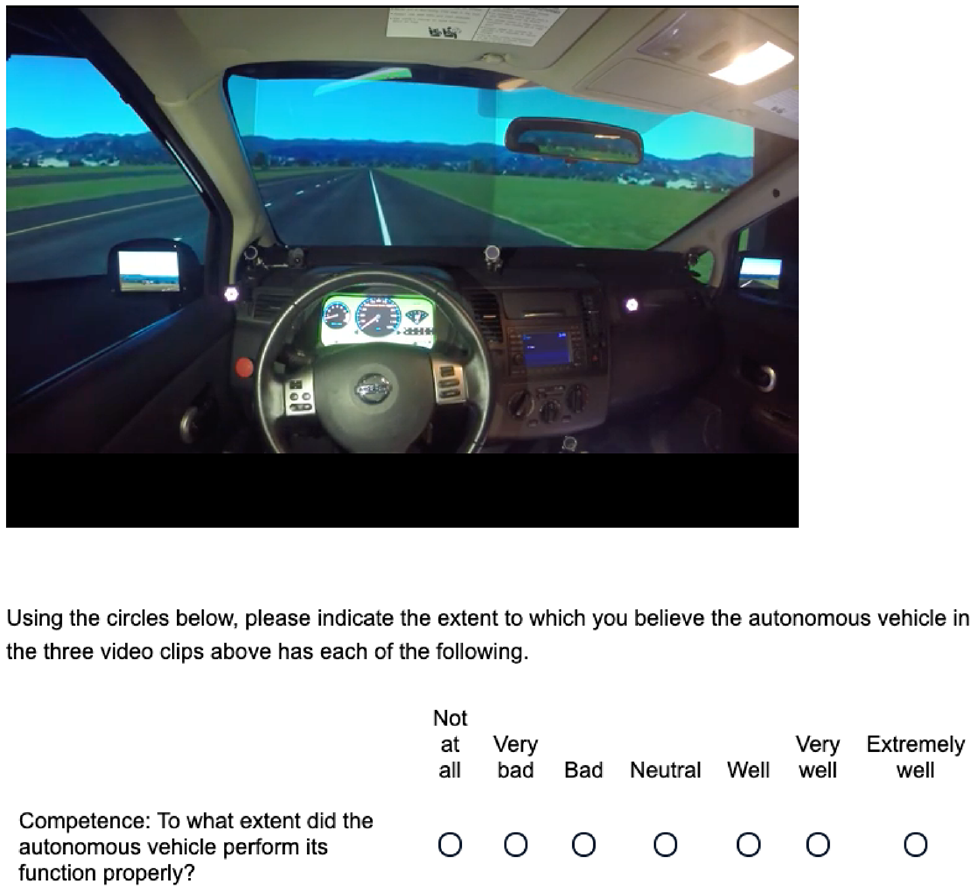
Video screenshot of explanation conditions in a high-fidelity vehicle simulator with the following survey.
Experimental Design
The study used a mixed-design with two independent variables: explanation conditions and context cultures. The four explanation conditions included: Nexpl—the AV provided no explanation about its actions; Bexpl—explanations were presented 7 s before the AV actions; Aexpl—explanations were presented within 1 s after actions had been taken by the AV; and PermReq—explanations were presented 7 s before the AV took actions and the participant was asked to approve or disapprove the AV’s proposed action on a pop-up window (Figure 3). The AV’s subsequent action would follow the participant’s choice. The level of cultural context was measured by a 5-point cultural context inventory consisting of twenty items developed by Richardson and Smith ( 21 ).
Pop-up window in Qualtrics.
The dependent variables included trust, preference, and anxiety. The preference and anxiety questionnaire was adapted from the CHIMe Lab at Stanford University and were used in previous studies to measure drivers’ attitudes ( 5 , 8 , 22 ). Anxiety comprised the averaged responses to four adjective items to describe the AV experience: fearful, afraid, anxious, and uneasy. Preference for AV comprised the averaged responses to eight items: intelligent, effective, reliable, helpful, smart, dependable, high quality, and efficient. Trust was measured using a highly validated trust-in-automation scale with six dimensions: competence, predictability, dependability, responsibility, reliability and faith ( 23 ). All the items were rated on 7-point Likert scales and we adapted the scales to reflect the driver–AV interaction context.
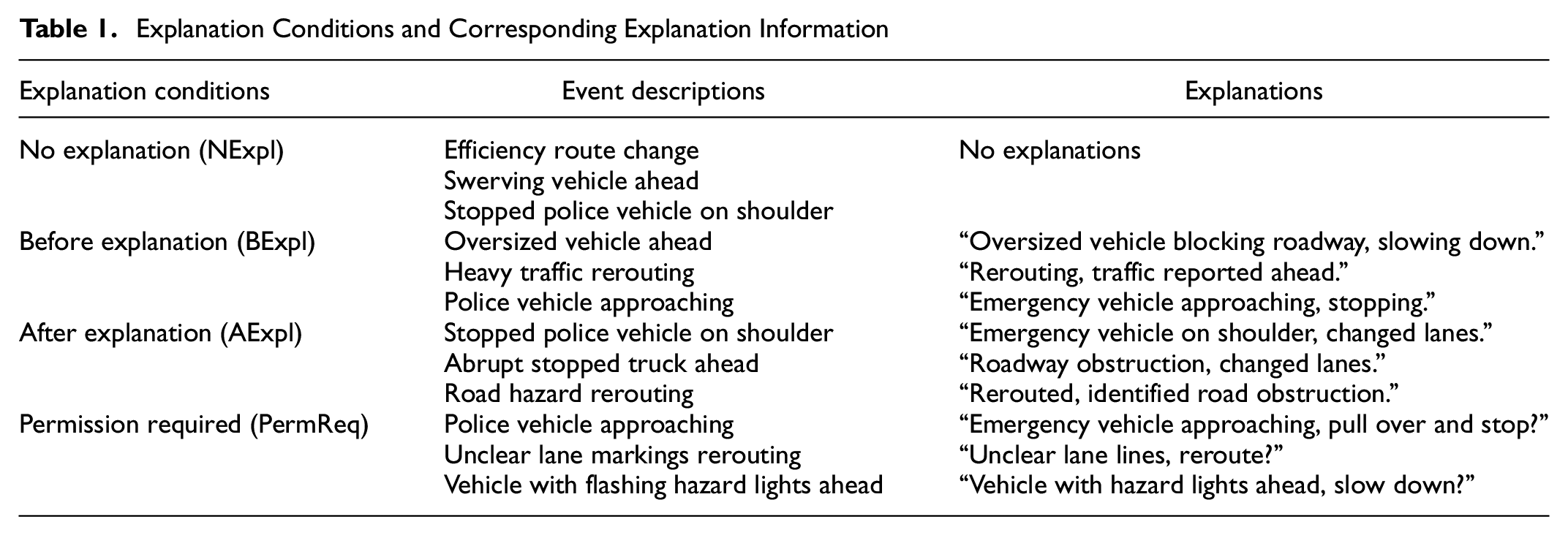
All participants experienced all four explanation conditions. The order of four explanation conditions was determined randomly. Each explanation condition contained three unexpected events. The events were selected based on previous literature and AV crash reports ( 5 , 8 , 24 , 25 ), which reflected realistic unexpected situations in automated driving and were programmable in the driving simulator. The three unexpected events fell into one of three categories: events by other drivers, events by police vehicles, and unexpected re-routes. Events occurred at prescribed times, are unique to each condition, and are balanced by type across conditions. There were normal traffic between events and during events. The event descriptions and corresponding explanation information was shown in Table 1.
Explanation Conditions and Corresponding Explanation Information
Procedure
All participants signed an informed consent once they arrived in the lab. The lab environment avoided potential distractions during the test and could make participants more engaged and responsive. In the real experiment, participants filled out the culture questionnaire measuring their high- or low- context culture dimension first. Then they were asked to imagine themselves as a driver of an SAE Level 4 AV and watch videos of the four explanation conditions. Participants were provided with a brief introduction of the driving environments and functions of the SAE Level 4 AV. After each explanation condition, they needed to complete a questionnaire measuring their trust, anxiety, and preferences. Measurements of demographic characteristics were obtained at the end of experiment.
Analysis
We conducted linear mixed models using R software to analyze the relationship between the independent variables (explanation conditions, high- or low- context culture dimension) and dependent variables (trust, preference, and anxiety ratings). The independent variables and their interactions were treated as fixed effects. The level 1 independent variable is the context culture, and the level 2 variable is the explanation conditions. Subjects were treated as random effects to resolve non-independence in all the models. Results are reported as significant for
Results
The Table 2 summarized the main effects of context cultures, explanation conditions, and their interaction effects on dependent variables (i.e., trust, prefence, anxiety).
The Effects of Context Cultures and Explanation Conditions on Dependent Variables

Trust
As shown in the Figure 4, the main effect of context cultures on trust was significant (
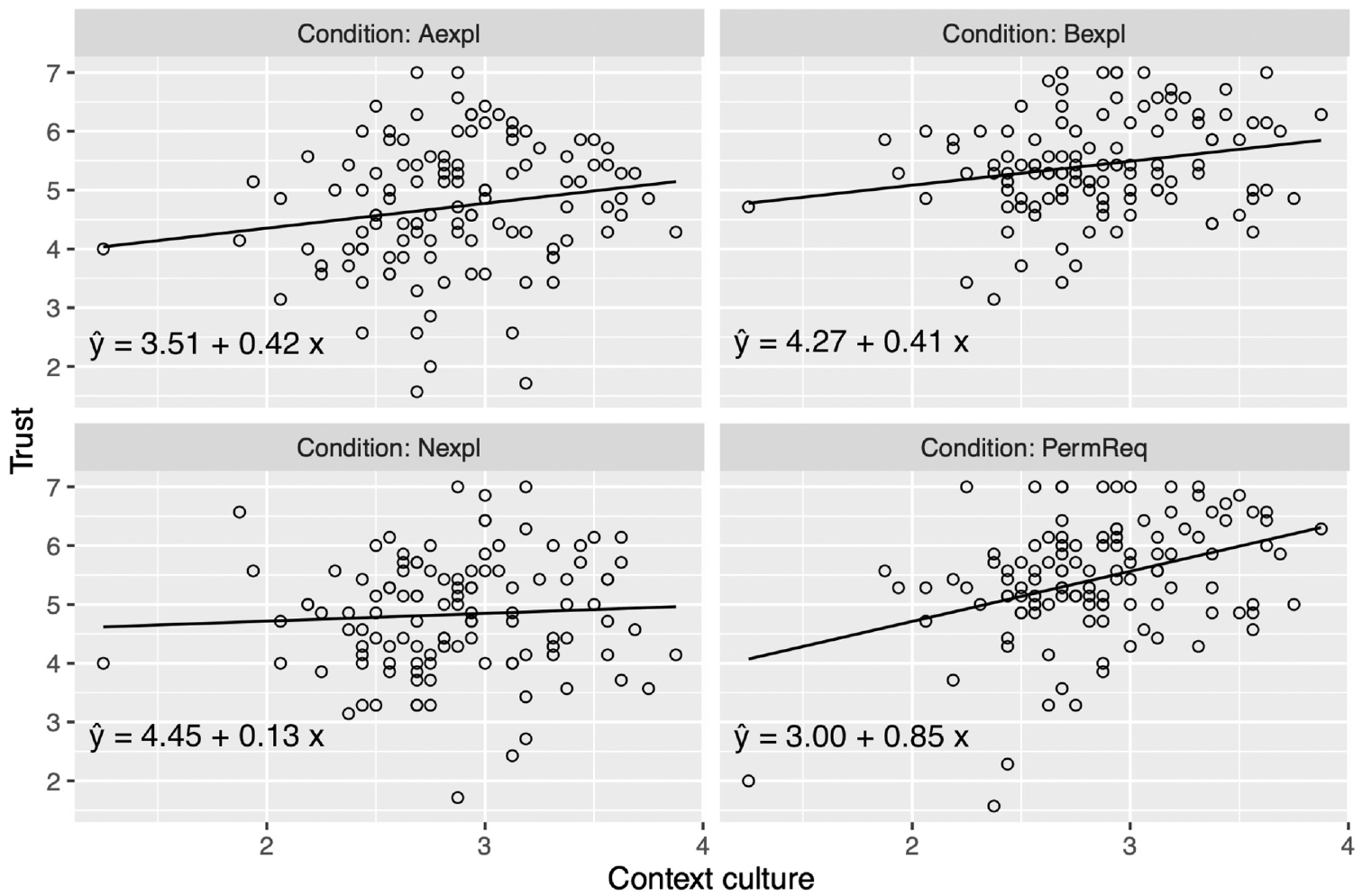
Trust in different context cultures and explanation conditions.
Preference
There was a significant main effect of explanation conditions on preference (
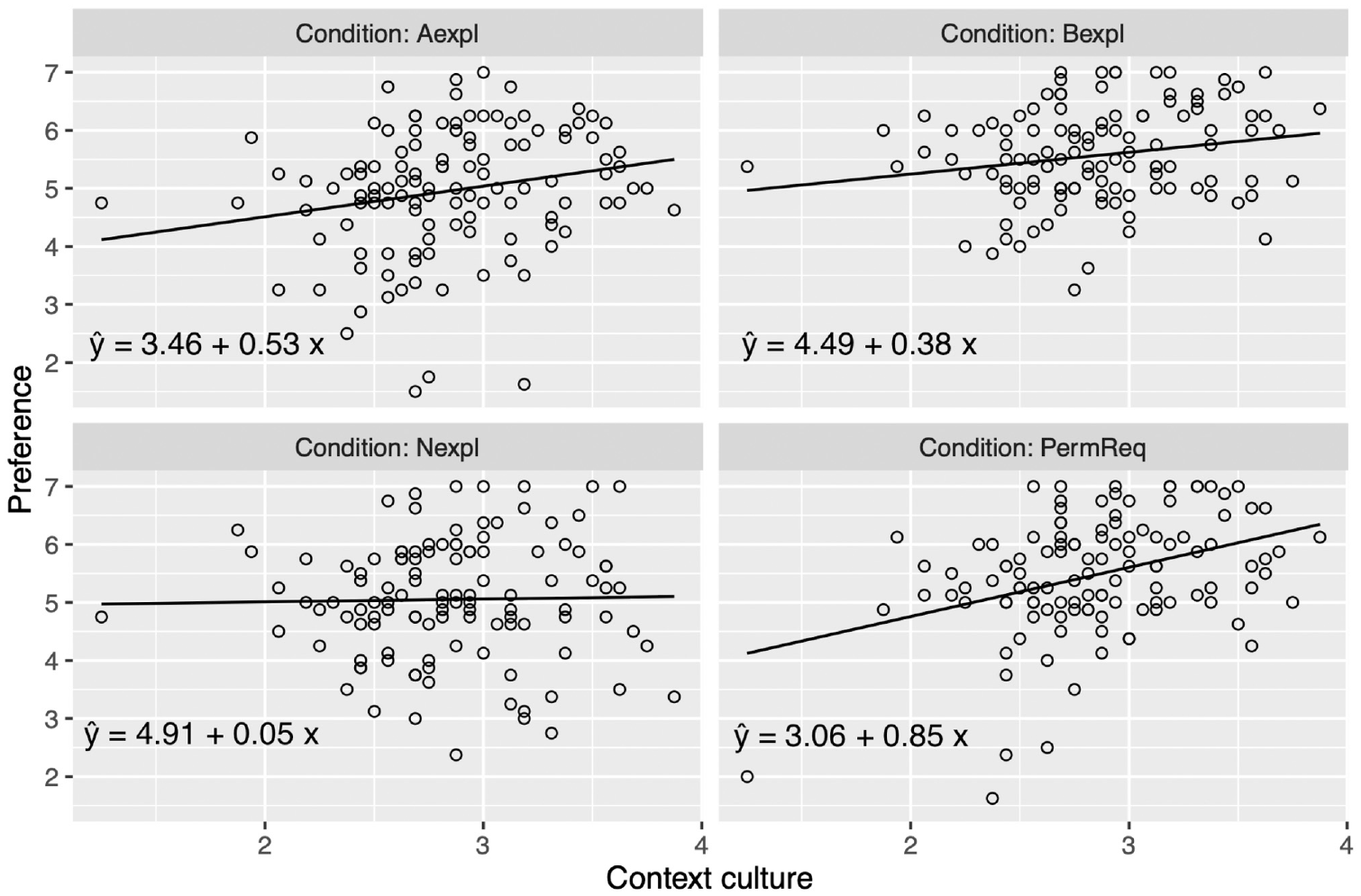
Preference in different context cultures and explanation conditions.
Anxiety
The distribution of participants’ anxiety in different context cultures and explanation conditions were shown in Figure 6. The main effects of context cultures, explanation conditions, and their interaction effects on anxiety were all not significant (context cultures:
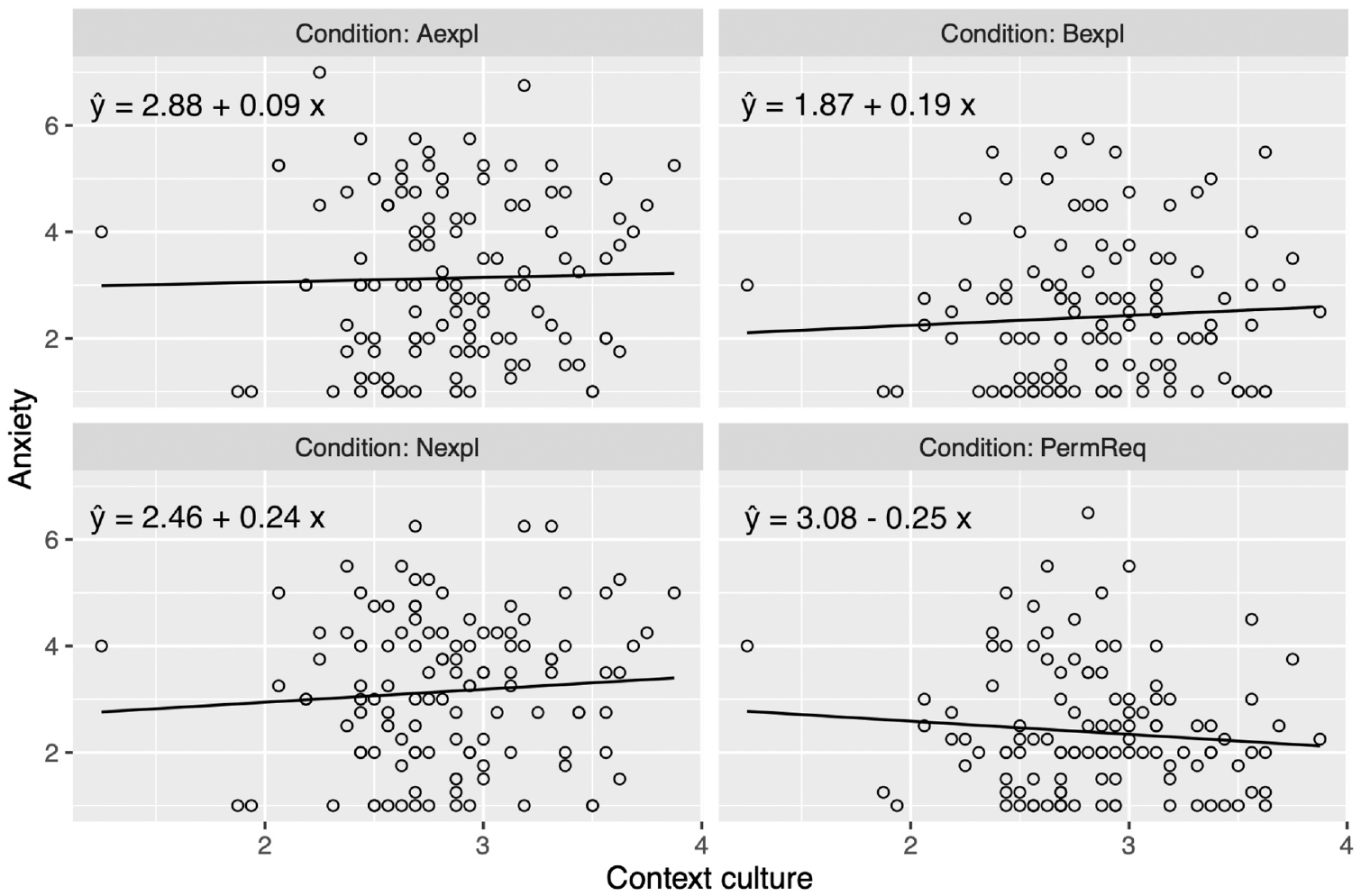
Preference in different context cultures and explanation conditions.
Discussion
This study investigated the effects of cultural context and explanation conditions on drivers’ trust in, preference for, and anxiety about the AV. We found that the interaction effect between context cultures and explanation conditions were significant on drivers’ trust in and preference for the AV, but not on the anxiety about the AV.
When no AV explanations were provided, the context cultures had little effect on drivers’ trust, preference, and anxiety. No matter which level of context cultures drivers had, they had little trust in and preference for the AV that did not provide explanations. Previous literature showed that people in high-context cultures used more nonverbal communications in online forums and evaluated the robots as being more likable, trustworthy, and credible when robots communicated implicitly ( 15 , 17 , 18 ). The reason why such phenomena disappeared in the human-AV interaction may be that AVs had less anthropomorphism. Thus, the effects of context cultures did not carry over from the human-human/robot interaction. Also, no explanation conditions may provide too limited cues and did not express enough information compared to general implicit and indirect communication styles.
When explanations were provided, context cultures influenced drivers’ trust in and preference for the AV, but not the anxiety about the AV. Individuals in higher context cultures had higher trust in and preference for the AV. As stated in the introduction, most Asian countries, such as China and India, are generally recognized as high-context cultures, and the United States and some European nations are categorized as low-context cultures. Our results aligned with existing literature as individuals in high-context cultures, such as Indians and Chinese, had more positive opinions of AVs than individuals in low-context cultures such as Americans ( 11 , 12 ).
In particular, we found that the influence of context cultures was the largest in the PermReq condition, where the AV presented explanations and asked for drivers’ permission before it took actions. This may be possibly explained by social structure and responsibility assignment in high-context cultures. Societies in high-context cultures have centralized social structure with authority and responsibility gathered at the top ( 14 ). Asking for permission indicated that drivers had more authority and took more responsibility. Thus, participants had more preference for and trust in the AV when the AV behaved in more culturally normative ways.
Consistent with previous literature ( 6 , 8 ), our study showed that explanation timing mattered for all the cultural groups. No matter which level of context cultures drivers were in, providing explanations before the AV took actions led to higher trust in and preference for the AV compared to providing explanations after the AV took actions. Providing explanations ahead reduced drivers’ concerns about the AV actions and gave drivers time to prepare and expect the AV’s actions to happen.
Our findings have implications on the design of explanation interfaces in the highly automated vehicles. The results indicate that the design of AV information delivery should vary across cultures. To be specific, we suggest that explanations should be provided before the AV takes the action. More importantly, if drivers are in high-context cultures, it is recommended to ask drivers for permission before the AV takes actions. The consideration of cultural differences will facilitate the development of culturally sensitive design in AVs. Ultimately, drivers will be much more willing to adopt the AVs with more adaptive and personalized in-vehicle interfaces.
Some limitations on the present findings should be acknowledged. First, we did not find any effects on drivers’ anxiety about the AV. This may be because our study was only an online video study recorded from driving simulators. Future research can use recordings from real-world scenarios or conduct on-road testings, where traffic flows are mixed and vehicles may have unlawful behaviors ( 26 ). The investigations of trust in AVs in such conditions can increase the ecological validity and generalization of findings. Second, our study only investigated the effects of one cultural dimension, namely context culture. Future studies can explore how other cultural dimensions, such as uncertainty avoidance, influence the communication between drivers and AVs. Third, although we tried to recruit participants from a wide range of culture backgrounds, our participants mainly come from China, India, and the United States. Future studies can recruit participants from other countries with more diverse demographic information.
Conclusion
This study investigated how explanation conditions and cultural context influenced drivers’ trust in, preference for, and anxiety about the AV. Using survey data from 118 participants in different levels of context cultures, we found that context cultures influenced drivers’ trust in and preference for the AV only when explanations were provided. Participants with higher context cultures had higher trust in and preference for the AV. Such influence was augmented especially when the AV asked for permission after explanations. Our results have important implications for the design of AV explanation interfaces. We recommend to provide explanations of AV actions before it takes actions. In particular, we suggest asking drivers for permission if drivers are in high-context cultures. The consideration of cultural differences will facilitate the development of culturally sensitive AVs. Ultimately, it will increase the acceptance of AVs for global use.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: ND, LR, XJY; data collection: ND; analysis and interpretation of results: ND, LR, XJY; draft manuscript preparation: ND, LR, XJY. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.