
Abstract
This paper proposes variable neighborhood search (VNS) heuristics to solve hub network design problems with profits, which are uncapacitated hub location problems with incomplete hub networks. These problems seek to locate hub facilities, design hub networks, and assign spokes to hubs to maximize total profits. Six problems consisting of multiple allocation, single allocation, and r-allocation strategies, with optional direct connections, are solved. Unlike hub location problems that minimize costs satisfying all service demands, the operators can choose to satisfy a subset of travel demands to maximize profits. Although exact methods and heuristics are both commonly used for solving hub location problems, the problems with profits are mainly solved by the former. Therefore, VNS-based heuristics are proposed to solve six variants of hub location problems. The proposed heuristics have the same shaking procedure to escape local optima, while neighborhood structures in the improvement procedure depend on the allocation strategies. To evaluate the heuristics, this study also designs enhanced Benders decomposition methods which are exact algorithms. Computational experiments on existing benchmark datasets reveal an extraordinary performance of the heuristics. For the instances that can be solved by exact methods, the heuristics solve over 90% to optimality while being one to three orders of magnitude faster than the commercial solver CPLEX and Benders decomposition. Given the outstanding accuracy, with significantly reduced computational cost, the study contributes to the usage of heuristics for hub location problems with profits, especially for larger-scale networks, where exact methods cannot be executed because of limited computational resources.
Hub-and-spoke networks are commonly used in transportation and telecommunication systems, such as logistics systems, the airline industry, postal delivery systems, cargo transportation, freight transportation, fast delivery systems, and many others (
1
,
2
). The flows between origin–destination (OD) pairs are collected, transferred, and distributed by hubs instead of being linked directly, which uses the advantage of the existing economies of scale to reduce transportation costs (
3
). Since the first hub location model was proposed by O’Kelly (
4
), the hub location problem (HLP) has become an important research topic in location science (
5
). According to the allocation scheme, which is the way spokes connect to hubs, HLPs can be classified into two basic types: single allocation and multiple allocation problems. Single and multiple allocation problems allow each spoke node to be connected to one or more hub nodes, respectively. Yaman (
6
) introduced the r-allocation strategy which allows each spoke to be allocated to at most
The typical objective function of HLPs is to minimize the total costs of setting up the hub network and serving demands between OD pairs in the literature ( 8 ). However, maximizing the profits of the network may be more valuable in some applications, such as commercial companies which are more concerned with profits than costs when designing their networks. From the profit point of view, not serving all demands may be more reasonable because serving some OD pairs is not profitable ( 8 ). Potential applications for HLPs with profits are in the network design for both airline passenger and freight transportation ( 9 ), truckload and less-than-truckload (LTL) transportation ( 10 ), and express shipment and postal delivery.
This paper studies a class of uncapacitated HLPs with incomplete hub network under three allocation strategies: multiple allocation, single allocation, and r-allocation to maximize profits. In each allocation strategy, two variants of models on whether direct connections are allowed or not are studied. A summary of the problems is given in Table 1. There is a focus on the heuristic algorithms to solve the six incomplete HLPs with profits presented in Taherkhani and Alumur ( 8 ).
Summary of Hub Location Problems With Profits Considered in This Study,
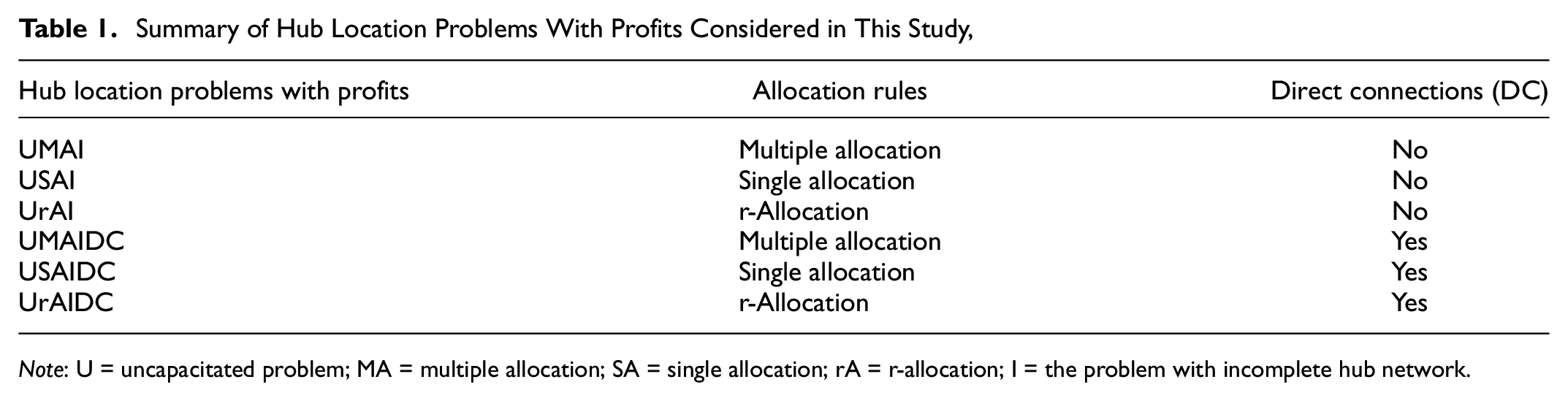
Note: U = uncapacitated problem; MA = multiple allocation; SA = single allocation; rA = r-allocation; I = the problem with incomplete hub network.
This paper proposes and implements an algorithm framework based on the variable neighborhood search (VNS) methodology to solve the profit maximization HLP, being the first application of VNS to HLPs with profits. Considering the features of profit maximization problems, two types of local search strategies of hubs and hub links are applied in the VNS. All heuristics to solve different variants use the same neighborhood structures in the shaking procedure to avoid local optima while different neighborhood structures in the improvement procedure. Six neighborhood structures of removing/adding/replacing hubs and hub links are considered in multiple allocation problems and r-allocation models. In the single allocation problems, eight neighborhood structures are applied, including two neighborhood structures of replacing hubs, called “alternate” and “locate.” For single allocation and r-allocation problems, a specific neighborhood structure is also applied to reassign the spokes. A sequential strategy is utilized to explore the neighborhoods. The performance of VNS-based heuristics on HLPs with profits is then compared under different allocation rules. The main contributions of this paper are:
Propose and implement VNS heuristics to solve HLPs with profits, to provide high-quality solutions.
Implement enhanced Benders decomposition algorithms to solve problems, which reformulate HLPs with new variables to obtain stronger Benders cuts.
Discuss the impact of parameter settings of the discount factor, revenue, and hub installation cost on run time.
The remainder of this paper is organized as follows. After this introduction, the next section reviews the related literature. The third section presents hub location problems with profits and mathematical models. The fourth section proposes the methodology based on VNS. The computational results are reported in the next section followed by conclusions.
Literature Review
This section reviews the literature related to this study. The literature is reviewed in three different aspects: HLPs and variants with cost minimization, HLPs with profits, and algorithms including exact algorithms and heuristics to solve HLPs. The reader may refer to excellent surveys by Campbell and O’Kelly ( 5 ), Alumur and Kara ( 11 ) and Alumur et al. ( 12 ) for HLPs.
Hub Location Problems
HLPs can be classified by allocation strategies. Three types of allocation strategies: single allocation, multiple allocation, and r-allocation, have been studied in the literature. The single allocation HLP in which each spoke is only allocated to one hub was first studied. The uncapacitated single allocation model was first proposed by O’Kelly (
13
). Campbell (
14
) and Ernst and Krishnamoorthy (
15
) studied different mathematical models. The capacitated single allocation problem has also been studied by Ernst and Krishnamoorthy (
16
) and Contreras et al. (
17
,
18
). Multiple allocation problems assign each spoke to hubs without limiting the number of hubs. The uncapacitated multiple allocation problem was formulated with integer programming (IP) by Campbell (
14
) and Ernst and Krishnamoorthy (
19
,
20
). Examples of studies for capacitated multiple allocation problems are Ebery et al. (
21
), Rodriguez-Martin and Salazar-Gonzalez (
22
) and Contreras et al. (
23
). In r-allocation problems, each spoke can be assigned to at most
Early studies on HLPs assumed that the hub network is complete with a direct link between each hub pair. However, the complete hub network assumption may be unnecessary in some applications because it increases the total costs of designing hub networks ( 24 ). Therefore, many researchers studied HLPs with incomplete hub networks in which some hub pairs are not linked. There are several examples of designing incomplete hub networks ( 25 – 29 ).
Direct connections (DCs) between spokes are not allowed in traditional HLPs ( 5 ). However, some OD pairs are very close, and flows between them travel through long paths of allocation arcs and hub links. This leads to more costs against the original intention of applying the hub-and-spoke network structure. Gelareh and Nickel ( 28 ), de Camargo et al. ( 29 ) and O’Kelly et al. ( 30 ) took into account the direct arcs when modeling HLPs.
Classical HLPs aim to minimize the total costs of transferring demands. Some studies also consider the additional costs of setting up hubs and hub links. With minimizing total costs in the system, all requests are satisfied between OD pairs. The cost minimization HLPs have been widely applied to many real-life applications. Typical applications can be found in postal delivery services and supply chain management logistics. Lin et al. ( 31 ) proposed a general capacitated p-hub median model and applied it to design a Chinese air cargo network. Çetiner et al. ( 32 ) considered a combined hub location and routing problem in which the first-stage problem is a HLP to minimize total transportation costs. They tested their model on the Turkish postal delivery system. Ishfaq and Sox ( 33 ) extended the p-hub median problem to the domain of intermodal logistics.
Hub Location Problems With Profits
In recent studies, some authors have modeled HLPs to maximize profits, which allow for remaining demands not served. A mixed-integer programming (MIP) formulation and a Lagrangian relaxation (LR) algorithm were presented by Alibeyg et al. ( 34 ) to solve uncapacitated HLPs with profits (HLPPs). Alibeyg et al. ( 35 ) formulated a class of hub network design problems with profit-oriented objectives as IP formulation. An exact algorithm based on the LR and branch-and-bound (BB) was proposed by Alibeyg et al. ( 36 ) to solve the models in Alibeyg et al. ( 35 ). Lin and Lee ( 10 ) compared the differences between cost-oriented objectives and profit-oriented objectives, and formulated the hub network design LTL problem with maximizing total profits under the price elasticity of demands. Taherkhani and Alumur ( 8 ) presented different models for HLPPs with fixed costs under different allocation strategies. The assumptions that the hub network is complete and DCs are not allowed were relaxed in their models. Wu et al. ( 37 ) studied a HLPP with service capacity and flow capacity constraints by formulating a MIP model. They applied a LR-based heuristic to solve the problem which showed good effectiveness. However, they considered the complete hub network in their problem. Taherkhani et al. ( 38 ) modeled the capacitated HLPP with multiple demand classes, which considered the complete hub network. A Benders decomposition method was developed to solve the determined version of the problem, and a Monte Carlo simulation-based algorithm was developed to solve the stochastic one.
There are also some variants of HLPs that consider maximizing profits. Some authors maximized the profits in a competitive scenario. Lüer-Villagra and Marianov ( 3 ) formulated and solved a hub location-pricing problem to maximize profits for the new company in a competitive situation by choosing the optimal hub network design and pricing, and a logit discrete choice model was introduced to capture the customers’ behavior. Zhao et al. ( 39 ), Abbasi and Niknam ( 40 ), and Esmaeili and Sedehzade ( 41 ) also studied the hub network design and pricing problem with competitive situations. Sharma et al. ( 9 ) proposed a two-phase mixed-integer linear programming model for the “coopetitive” profit maximization HLP in the airline industry. Hou et al. ( 42 , 43 ) integrated the revenue management and hub location into a revenue management problem to maximize the profits. Taherkhani et al. ( 44 ) studied profit maximization capacitated multiple allocation HLPs with the complete hub network under two different types of uncertainty: stochastic demands and uncertain revenue. To model the problems in different scenarios, a two-stage stochastic programming model and robust stochastic models were proposed and solved by Benders decomposition algorithms with a sample average approximation scheme. The results show that the proposed algorithms were able to solve optimally instances with up to 75 nodes.
Applications of HLPPs can be found in freight delivery. Lin and Lee ( 10 ) designed a hub network for LTL freight delivery to maximize total profits under the price elasticity of demand. They tested it with the second largest time-definite LTL freight delivery common carrier in Taiwan to show different behaviors between cost minimization and profit maximization.
Algorithms to Solve Hub Location Problems
Most HLPs are NP-hard, which cannot be solved on a large scale in polynomial time ( 11 , 45 ). To solve HLPs to optimality, many solution techniques have been proposed, including BB algorithms ( 8 , 46 , 47 ), LR-based algorithms ( 35 ), and Benders decomposition algorithms ( 29 , 38 , 48 , 49 ). The first work to use a Benders decomposition to solve the uncapacitated multiple allocation HLP was de Camargo et al. ( 48 ). Contreras et al. ( 49 ) developed an enhanced Benders decomposition algorithm for the uncapacitated multiple allocation HLP by a multicut reformulation, Pareto-optimal cuts, reduction tests, and a heuristic procedure. Taherkhani et al. ( 38 ) applied the Benders reformulation to solve a capacitated HLPP with the complete hub network under multiple demand classes.
Since it is difficult to formulate exact algorithms to solve large-scale HLPs, several heuristics have been proposed for this purpose. Tabu search heuristics were developed by Klincewicz ( 50 , 51 ) and Skorin-Kapov and Skorin-Kapov ( 52 ). A simple simulated annealing algorithm was proposed by ( 15 ). LR-based heuristics were studied by Pirkul and Schilling ( 53 ) and Elhedhli and Wu ( 54 ). Kratica et al. ( 55 ) used genetic algorithms to solve the uncapacitated p-hub median problem with single assignments. VNS was proposed by Mladenović and Hansen ( 56 ), and is commonly used to solve HLPs. Ilić et al. ( 57 ) developed a general VNS for solving the uncapacitated single allocation p-hub median problem. They proposed a new nested variable neighborhood descent to reduce the number of local minima. Recently, Mikić et al. ( 58 ) introduced VNS to solve the capacitated modular HLP. Dai et al. ( 59 ) used a VNS method to refine the solution in their implementation of a heuristic-based method called HUBBI. Wandelt et al. ( 60 ) proposed a network contraction approach to speed up the genetic, VNS, and Benders decomposition algorithms in six different HLPs. Applying the contraction technique, they solved the problem with networks of sizes up to 5,000 nodes. Fontes and Goncalves ( 61 ) presented a new hub-and-spoke network problem with multiple allocations of sub-hub nodes for liner shipping operations and applied a variable neighborhood decomposition search algorithm to solve the proposed model.
To the best of the authors’ knowledge, except for Alibeyg et al. ( 34 ) and Wu et al. ( 37 ), HLPPs are mainly solved with exact methods. Alibeyg et al. ( 34 ) presented an uncapacitated HLPP with the complete hub network and proposed a LR-based algorithm, which is able to obtain tight lower and upper bounds, and a primal heuristic was used to find the feasible solution. Wu et al. ( 37 ) also discussed the HLPP under the complete hub network and applied a LR-based heuristic to solve the problem. However, both of those papers considered the complete hub network in their problems. They applied a LR-based heuristic to solve the problem which showed good effectiveness. However, when the problem is the incomplete hub network and relaxes the two-hop constraint, it would not scale up well because LR is often slow and is soon stuck. Therefore, heuristics are needed to solve HLPPs with the incomplete hub network.
Model Definition and Formulation
HLPPs make joint location and network design decisions to optimize the objective of the net profits. Given a set of nodes
The hub location models in this paper were proposed by Taherkhani and Alumur (
8
), and VNS-based heuristics to solve them are proposed in the next section. Six types of HLP with incomplete hub networks are formulated as the MIP problems. These six problems include multiple allocation, single allocation, and r-allocation strategies. The notations of the parameters in the hub location models are shown in Table 2. The flow originated from the node
Parameters for Incomplete Hub Location Problems With Profits

Decision Variables for Uncapacitated Incomplete Hub Location Problems With Profits
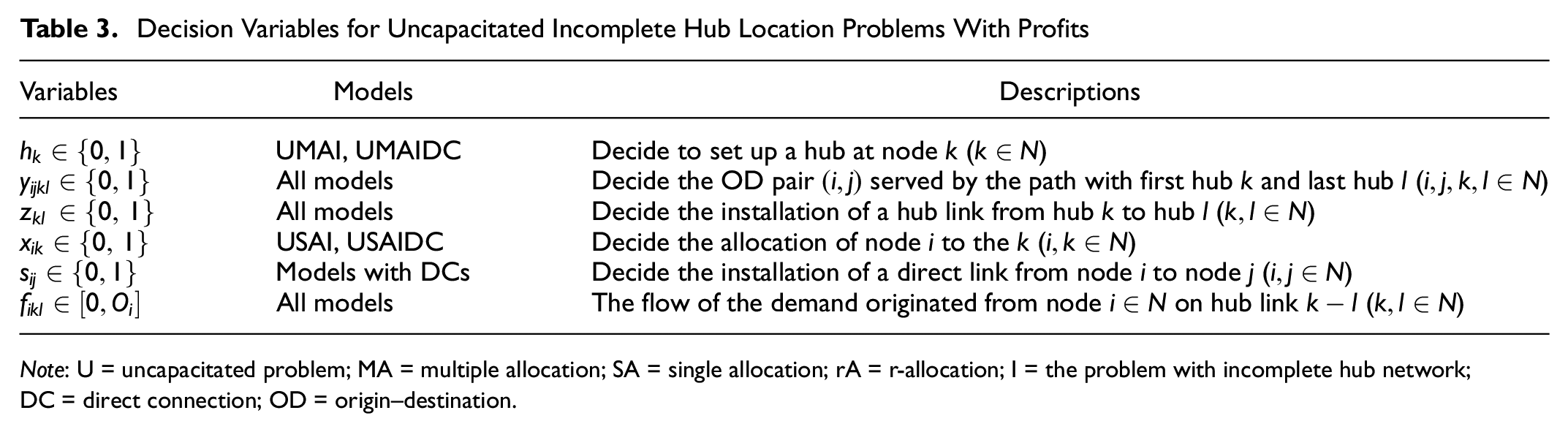
Note: U = uncapacitated problem; MA = multiple allocation; SA = single allocation; rA = r-allocation; I = the problem with incomplete hub network; DC = direct connection; OD = origin–destination.
Multiple Allocation Problem
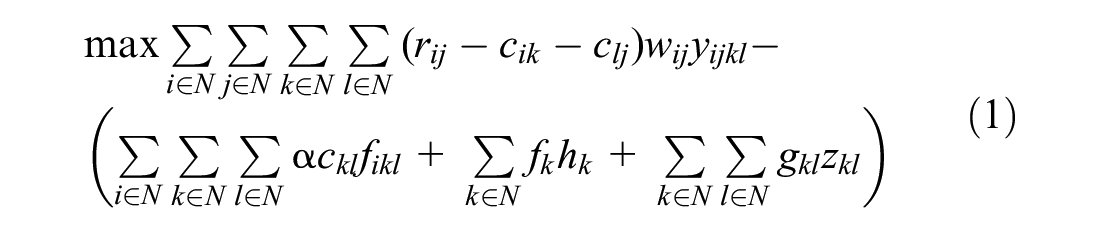
In the multiple allocation HLPP, the hub network is determined with the locations of hubs and the selection of hub links, and then spokes are allocated to hubs with no limit to the number of hubs. The multiple allocation problem with profits is modeled as follows:
s.t.










Equation 1 is the objective function denoting total net profits. The first part is the revenue subtracting transportation costs between spokes and hubs for OD pairs. The second part covers all costs related to hubs, including transportation costs through hub links, hub installation costs, and hub link installation costs. Equation 2 ensures that the path through the hubs must be unique for a given OD pair. Equation 3 is a constraint that the path of the demand between OD pairs must be served through the open hubs. Equations 4 and 5 are flow balance constraints. Equations 6 and 7 denote that hub links are set up between hubs. Equations 8 to 11 are domain constraints of decision variables. There are
Single Allocation Problem
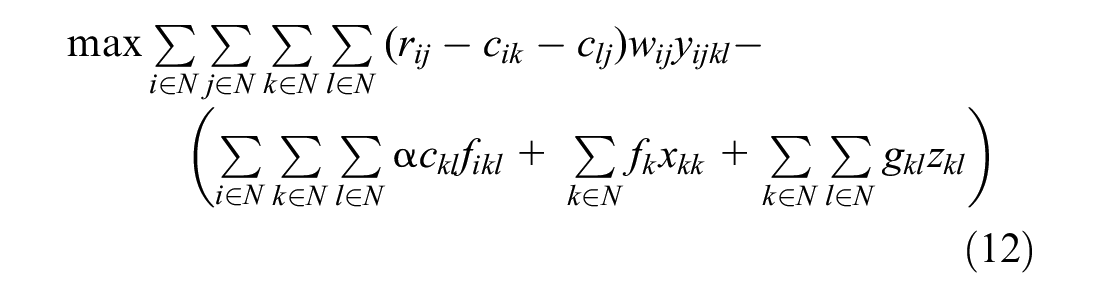
For the uncapacitated single allocation HLPP, each spoke can only be allocated to one hub. Thus, it needs a binary variable
s.t. (2), (4)-(5), (8), (10)-(11)







The objective function (Equation 12) is similar to that of the multiple allocation model except for the cost of opening hubs. Equations 2, 4, 5, 8, 10, and 11 in this model have the same explanation as those in the multiple allocation model. Equation 13 denotes that each node is allocated to at most one hub. Equation 14 ensures that nodes can only be allocated to opening hubs. Equations 15 and 16 guarantee that paths of OD pairs pass the allocated hubs. Equations 17 and 18 denote that hub links are set up between open hubs. Equation 19 requires that decision variables
R-Allocation Problem
For the r-allocation problem, each spoke can be allocated to

Hub Location Problems Allowing for Direct Connections
In the real-world network, direct transportation between OD pairs is sometimes allowed, thus it is necessary to discuss HLPs allowing for DCs. An additional binary variable
The multiple allocation problem allowing for DCs is modeled in the following formulation:
s.t. (3)-(11)




Compared with the version of UMAI, profits from the demand of OD pairs being transported directly and costs operating direct links are considered in the objective function (Equation 21), and four sets of constraints related to DCs are added. Equations 22 and 23 ensure that DCs are between non-hub nodes. Equation 24 ensures that the demand of each OD pair is served by only one path. The model has
The single allocation problem allowing for DCs is formulated as follows:
s.t. (4), (5), (8), (10), (11), (13)–(19), (24), (25)


Equation 26 is the objective function to maximize total profits. Besides the same constraints as USAI, three sets of constraints (Equations 25, 27, and 28) about DCs are included in USAIDC. Equations 27 and 28 ensure that DCs are only operated between non-hub nodes. The model has
After replacing the constraint (Equation 13) with Equation 20 in USAIDC, the formulation of the r-allocation model allowing for DCs is obtained.
VNS-Based Heuristics
This section introduces VNS-based algorithms for the HLPPs presented in the last section. First, it introduces the solution representation in the heuristics of this study. Next, the initialization process is presented, followed by the neighborhood structures applied following the introduced solution representation. After that, the shaking procedure to avoid local optima is proposed. Finally, the overall framework of algorithms is summarized.
Solution Representation
The goal of HLPPs is to determine hub locations, inter-hub links, assignments of spokes, and travel paths of the served demand between OD pairs. The solution structure includes two parts: the hub network and the assignments of nodes. A solution is denoted as
The path from node
In problems without DCs, matrix
In problems allowing for DCs, the costs of transferring flows directly are the sum of transportation costs and setup costs of direct links, that is,
Subtracting the operation costs of the hub network from the sum of net revenues of the demand satisfied between OD pairs, the objective value can be obtained. Operation costs
Initial Solution
This section describes how to gain a feasible initial solution. Flows that come in and out of node
Neighborhood Structure
This section considers two types of local search strategies of removing/adding/replacing hubs and hub links in six problems. In multiple allocation problems, six neighborhood structures are defined for a given solution
The first type of local search strategy is on hubs, including removing/adding/replacing hubs. For a given solution, the hub set is sorted by descending order of total flows through them, which is denoted by
Removing hubs: This neighborhood structure is denoted by
Adding hubs: This neighborhood structure is denoted by
Replacing hubs: For multiple allocation problems and r-allocation problems, a neighborhood structure is denoted as
The second type of local search strategy is on hub links, including removing/adding/replacing hub links. All the connected hub links
Removing hub links: This neighborhood structure is denoted by
Adding hub links: This neighborhood structure is denoted by
Replacing hub links: This neighborhood structure is denoted by
In the local search strategies of removing/adding/replacing hubs, spokes are assigned to hubs according to the nearest hub allocation rule in both single and r-allocation problems. To improve the performance of VNS, neighborhood structures of exchanging hubs and spokes are also used. In the single allocation, the operation called
Shaking
The shaking procedure is used to avoid the local optimal solution, which requires the solution
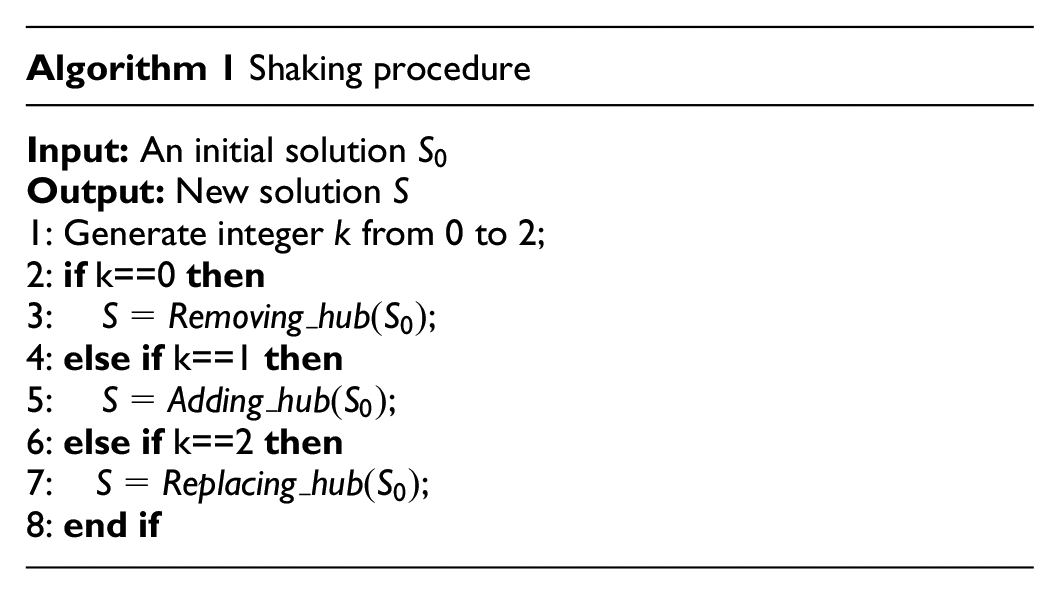
Specifically, operations for hubs are selected randomly. The hub and the non-hub node are then randomly chosen to conduct the selected operation. A hub is randomly removed from the current hub set if the operation of removing hubs is selected. A non-hub node is randomly chosen and added to the set of hubs when the selected operation is adding hubs. A hub node is exchanged randomly with a non-hub node when the operation of replacing the hubs is selected. The output is the solution obtained after random operations on hubs.
Overall Heuristic
This section proposes heuristics based on VNS to solve HLPPs, which apply the proposed neighborhoods and the shaking procedure. A sequential strategy is used for exploration of the neighborhoods within deterministic local search, which is defined as
In the improvement procedure, all
The steps of VNS-based heuristics are presented in Algorithm 2. For a given initial solution with the hub set
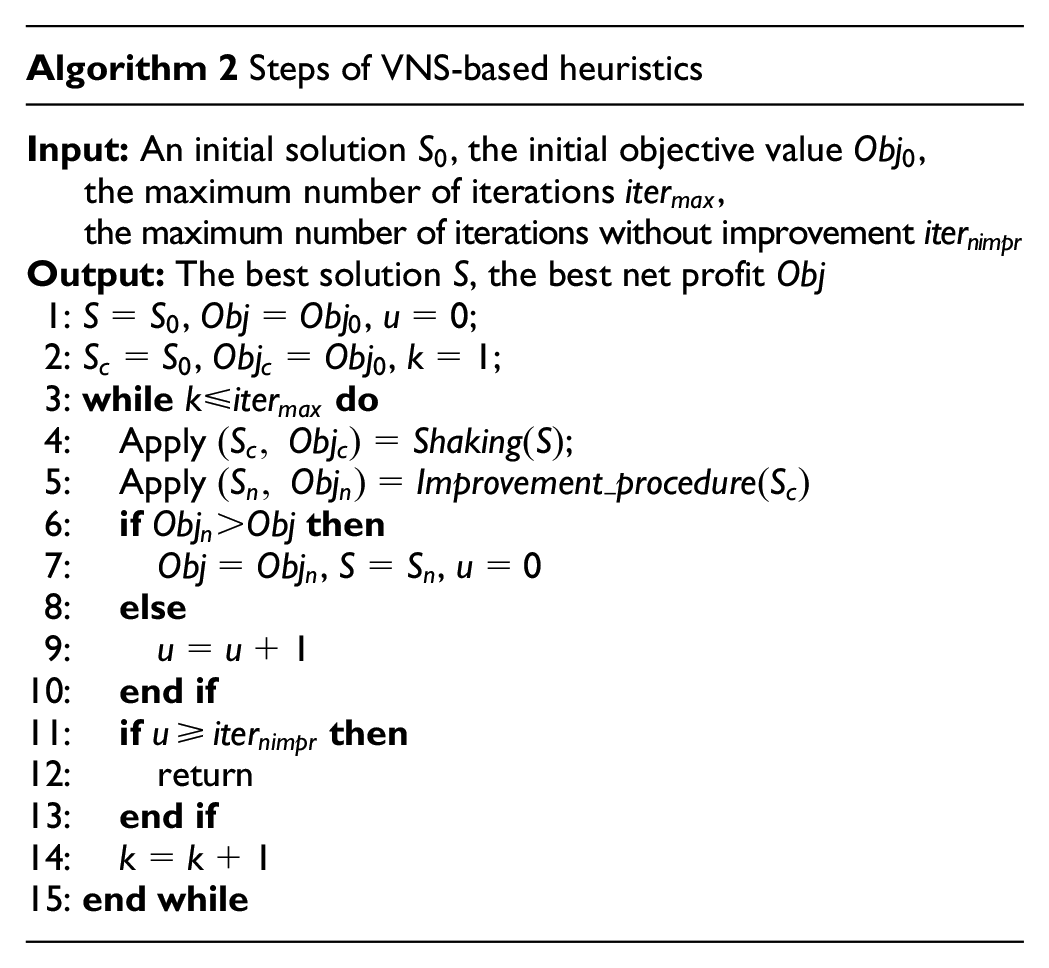
There are two parameters in the VNS-based heuristics: the maximum number of iterations,
Computational Results
This section reports a set of computational experiments with the VNS-based heuristics on HLPPs. First, the datasets and the environment of the experiments are described. After that, solutions obtained by VNS are compared with the commercial solver CPLEX and enhanced Benders decomposition. Next, the initial solution selection and parameter settings of the heuristics are discussed. Finally, the heuristics are tested on a larger-scale network.
Datasets and Experimental Setups
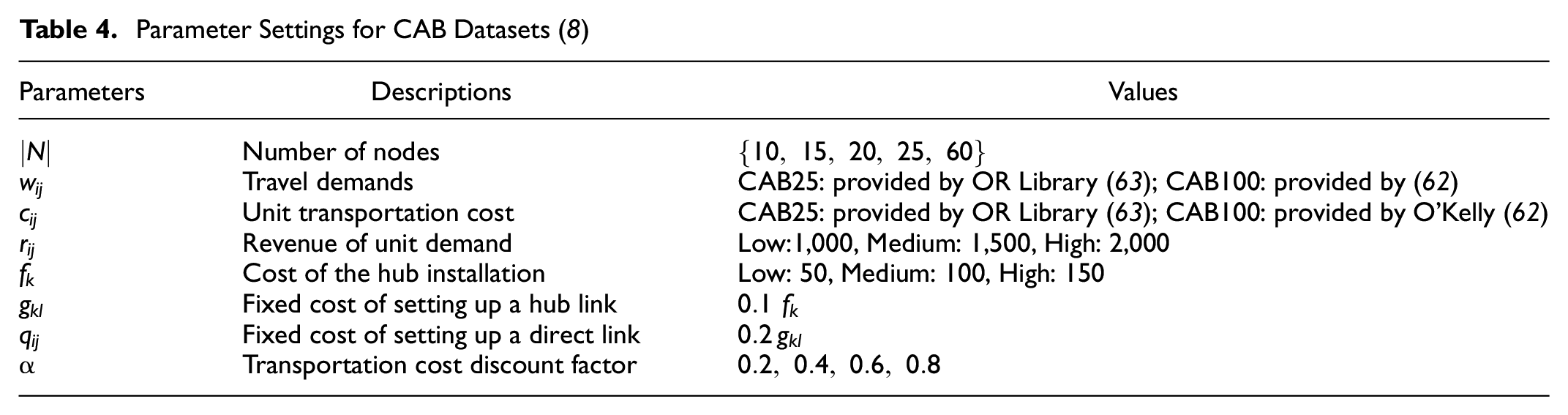
This study uses datasets that are well known in HLPs: CAB with 25 nodes (CAB25) ( 13 ) and CAB with 100 nodes (CAB100) ( 62 ) to test the experiments. The CAB dataset with 25 nodes is based on airline passenger flows between 25 cities in the U.S.A., accessed in the OR Library ( 63 ). The transportation costs and travel demands between each city pair are provided. The CAB dataset with 100 nodes is the sample of air flows between major U.S. cities, and it is available from O’Kelly ( 62 ). In accordance with Taherkhani and Alumur ( 8 ), demands between each node pair are normalized to make the sum of demands equal to one. The parameter settings of unit revenue, discount of the transportation cost between hub pairs, cost of hub installation, cost of operating hub links, and cost of operating direct links are provided in Taherkhani and Alumur ( 8 ). The parameter settings of the CAB datasets are shown in Table 4.
Parameter Settings for CAB Datasets ( 8 )
All experiments were carried out with one thread on a laptop with four-core Intel (R) Core (TM) i7-6500 2.50GHz processor and 16GB RAM under Fedora 30 environment. The VNS was implemented with the Python programming language. The exact solutions were obtained using IBM ILOG CPLEX 12.9 and Benders decomposition. The Benders decomposition algorithms are presented in Appendix C and Appendix D. The models were coded in Python with all CPLEX parameters being default. The tolerance gap of the optimal objective value is
Comparison of VNS-Based Heuristics With Exact Methods
This section presents tests of six variants of HLPPs for the CAB25 dataset with
Results for Multiple Allocation Problems
This section presents the tests of two variants of multiple allocation problems. For UMAI, 139 of 144 instances are solved optimally by VNS for median gaps. Four instances use up the time limit, and three of them do not find the optimal solution with CPLEX in 12 h. For UMAIDC, VNS solves 134 of 144 instances to optimality for the median gaps. In the experiments, CPLEX solves three instances using up the time limit, and one instance is not solved to optimality.
It is more difficult to solve the instances with high revenue than those with medium and low revenues (see Taherkhani and Alumur [ 8 ]). Therefore, Table 5 summarizes the performance of CPLEX, Benders, and VNS for instances with high revenue on multiple allocation models. The results of instances with medium and low revenues are also shown in Appendix B. Two letters are used to represent the cost and revenue parameters. The first letter represents the cost parameter: “L” is the low cost with a value of 50, “M” is the medium cost with a value of 100, and “H” is the high cost with a value of 150. The second letter represents the revenue parameter. The first three columns report parameters of costs and revenues, the problem size, and the discount factor. For each instance in multiple allocation problems, the next two columns show the objective value of CPLEX obtained within the time limit, and the run time of instances. CPLEX uses up the time limit for some instances, and “*” is used to mark them in the column “Time(s).” The next two columns show the objective value and the run time solved by Benders, followed by the median gaps of VNS and the average run time of VNS.
Multiple Allocation Problems Solutions With High Revenue

Note: |N| = the node number of instances; Pra. = the cost parameter; L = the low cost with a value of 50; M = the medium cost with a value of 100, H = the high cost with a value of 150. α = the discount factor with {0.2, 0.4, 0.6, 0.8}; Obj =the objective value; * = CPLEX uses up the time limit.
From Table 5, it is found that 43 of 48 instances can obtain the optimal solution with VNS for both multiple allocation problems. The run time of VNS is much faster than CPLEX and Benders. The model with DCs results in higher net profits compared with the one without DCs. When hub installation costs increase, values of net profit decrease, and the run time of CPLEX, Benders, and VNS tends to decrease. When discount factor
Results for Single Allocation Problems
The CAB25 dataset was also tested with node number
Table 6 summarizes solutions of single allocation problems with high revenue. The results of instances with medium and low revenues for single allocation problems are reported in Appendix B. The same columns are used in Table 6 as those in Table 5. “*” is also used to mark the instances which are solved by CPLEX using up the time limit in the column “Time(s)” of CPLEX. Observing Table 6, it is found that the model with DCs results in higher net profits compared with the variant without DCs. The VNS performs better for the model allowing for DCs than the one without DCs for high revenue. In the model without DCs, the solutions obtained by VNS have gaps in seven instances, while 48 instances with the high revenue of the model allowing for DCs all obtain the optimal solution.
Single Allocation Problems Solutions With High Revenue
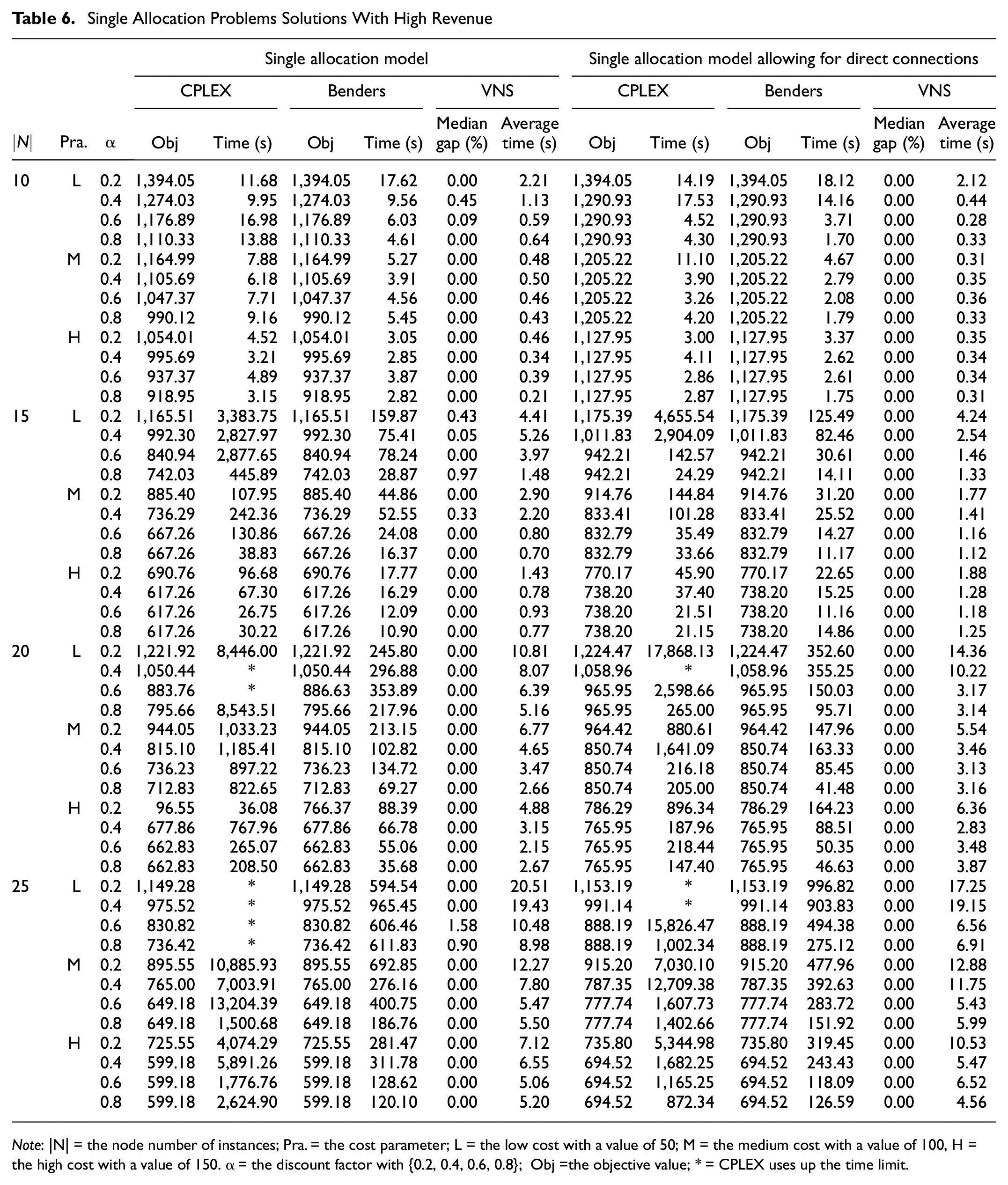
Note: |N| = the node number of instances; Pra. = the cost parameter; L = the low cost with a value of 50; M = the medium cost with a value of 100, H = the high cost with a value of 150. α = the discount factor with {0.2, 0.4, 0.6, 0.8}; Obj =the objective value; * = CPLEX uses up the time limit.
Compared with the solutions in Table 5, the net profit values of single allocation models are lower than those of multiple allocation models for instances with the same parameter settings. CPLEX solves instances with multiple allocation models more easily than those with the single allocation strategy, while VNS solves single allocation models faster than multiple allocation models because of the larger space to search in multiple allocation problems.
Results for r-Allocation Problems
To analyze the performance of r-allocation models, the same CAB25 instances are tested with node number
Table 7 reports the results obtained with r-allocation models with high revenue. The results of instances with medium and low revenues for r-allocation problems are shown in Appendix B. In the model without DCs, it is found that eight of 48 instances are solved by VNS with non-zero gaps, and only one instance has a gap of over 1%. CPLEX uses up the time limit for nine of 48 instances and obtains a solution with non-zero gaps for seven of them. In the model allowing for DCs, all of 48 instances are solved to optimality by VNS and four of them use up the time limit when solved by CPLEX.
r-Allocation Problems Solutions With High Revenue
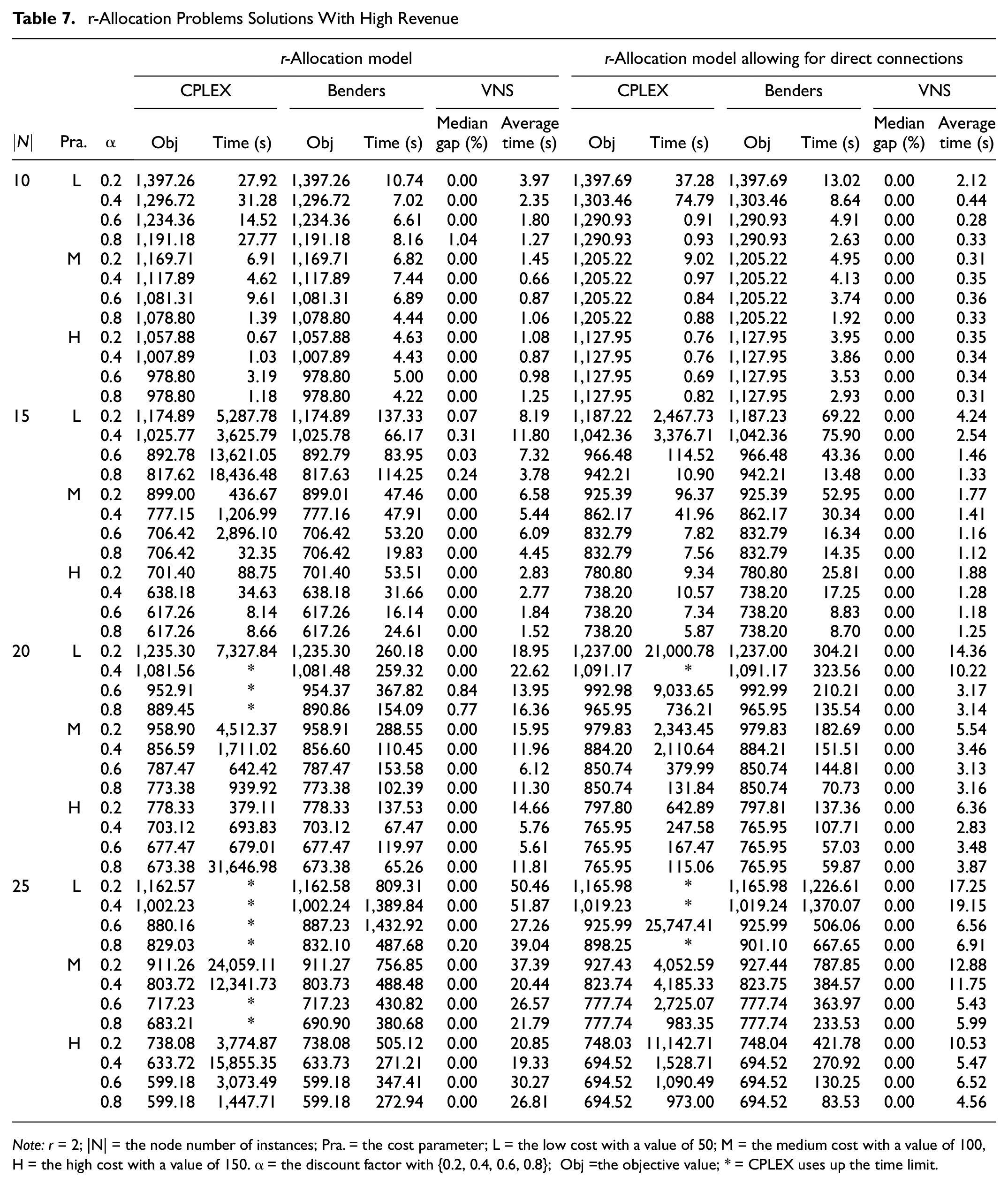
Note: r = 2; |N| = the node number of instances; Pra. = the cost parameter; L = the low cost with a value of 50; M = the medium cost with a value of 100, H = the high cost with a value of 150. α = the discount factor with {0.2, 0.4, 0.6, 0.8}; Obj =the objective value; * = CPLEX uses up the time limit.
The r-allocation models are more difficult to solve than the single and multiple allocation models when CPLEX is used. Compared with multiple allocation models, additional sets of binary variables and corresponding sets of constraints need to be defined. They are more difficult than single allocation models with regard to solving efficiency, because allowing for
To show the performance of the heuristics for solving different variants of HLPPs, Figure 1 shows the average time of CAB25 instances solved by VNS, CPLEX, and enhanced Benders decomposition for different network sizes. The average run time of VNS, CPLEX, and enhanced Benders decomposition for different network sizes is visualized in each sub-figure. The y-axis of each figure is on a log scale. As shown in Figure 1, the VNS of multiple allocation problems is two orders of magnitude faster than CPLEX, while it is one order of magnitude faster than that of Benders. The VNS of single allocation problems is two to three orders of magnitude faster than CPLEX, while it is one to two orders of magnitude faster than that of Benders. The VNS of r-allocation problems is two to three orders of magnitude faster than CPLEX, and it is one order of magnitude faster than that of Benders. Figure 2 shows the average of gaps of CAB25 instances with the node number
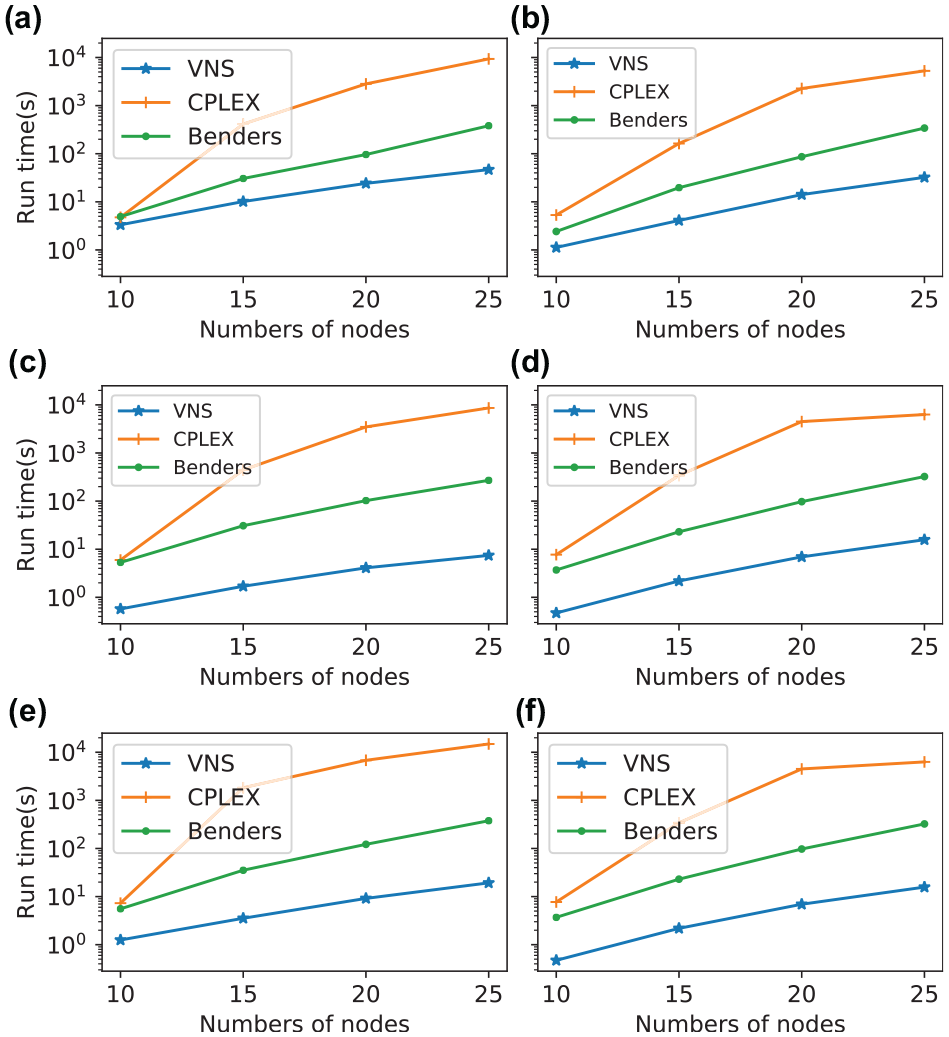
Average run time of instances solved by VNS, CPLEX, and enhanced Benders decomposition with the same number of nodes. The number of nodes is

The average gaps of variable neighborhood search solutions compared with optimal solutions for instances with the same number of nodes. The number of nodes is
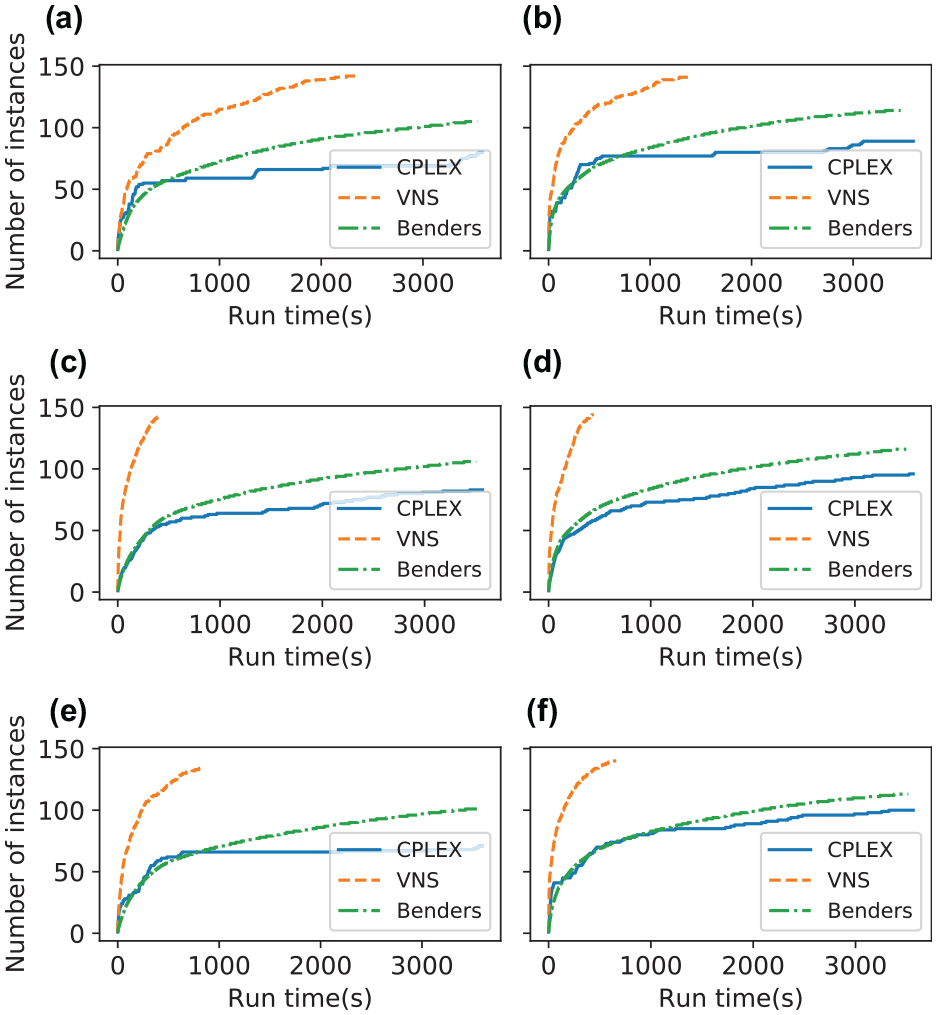
Numbers of instances solved by three methods to optimality in one hour. The number of nodes is
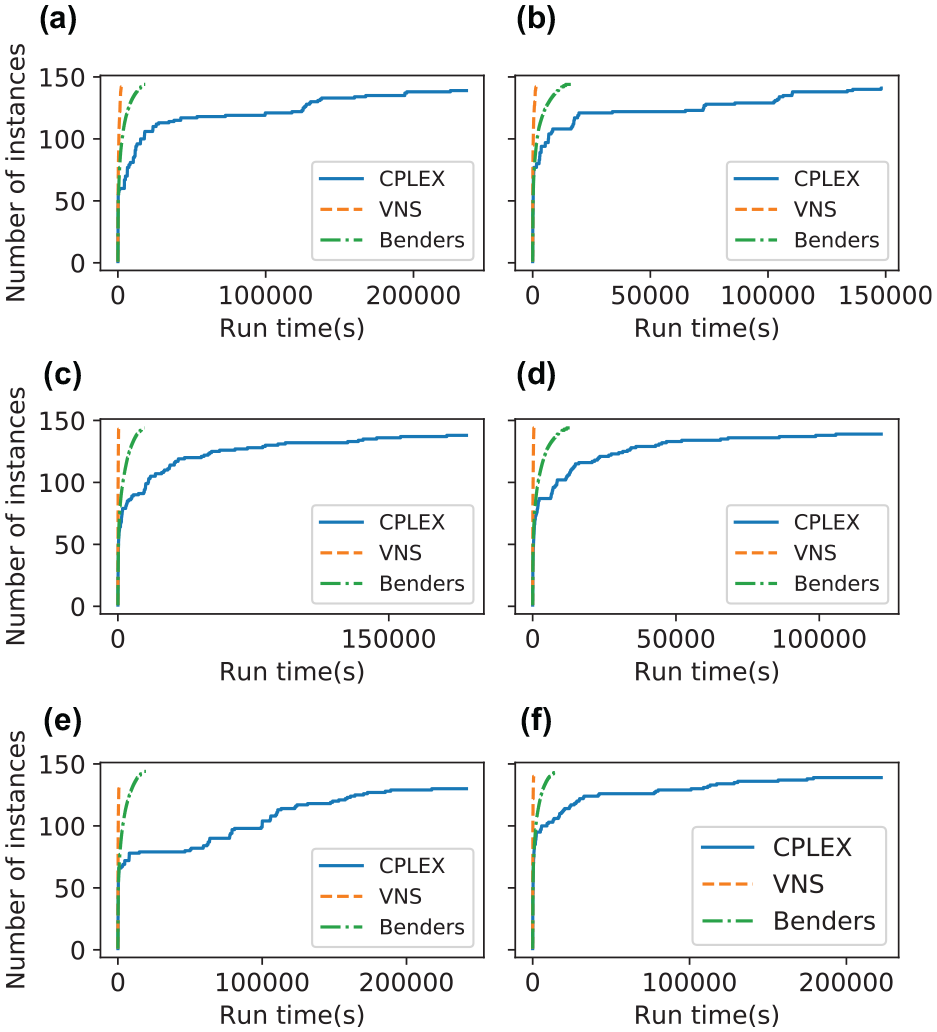
Numbers of instances solved by three methods to optimality in all tests. The number of nodes is
Figures 5 and 6 show the run time of CPLEX and VNS for instances with different parameter settings and node number
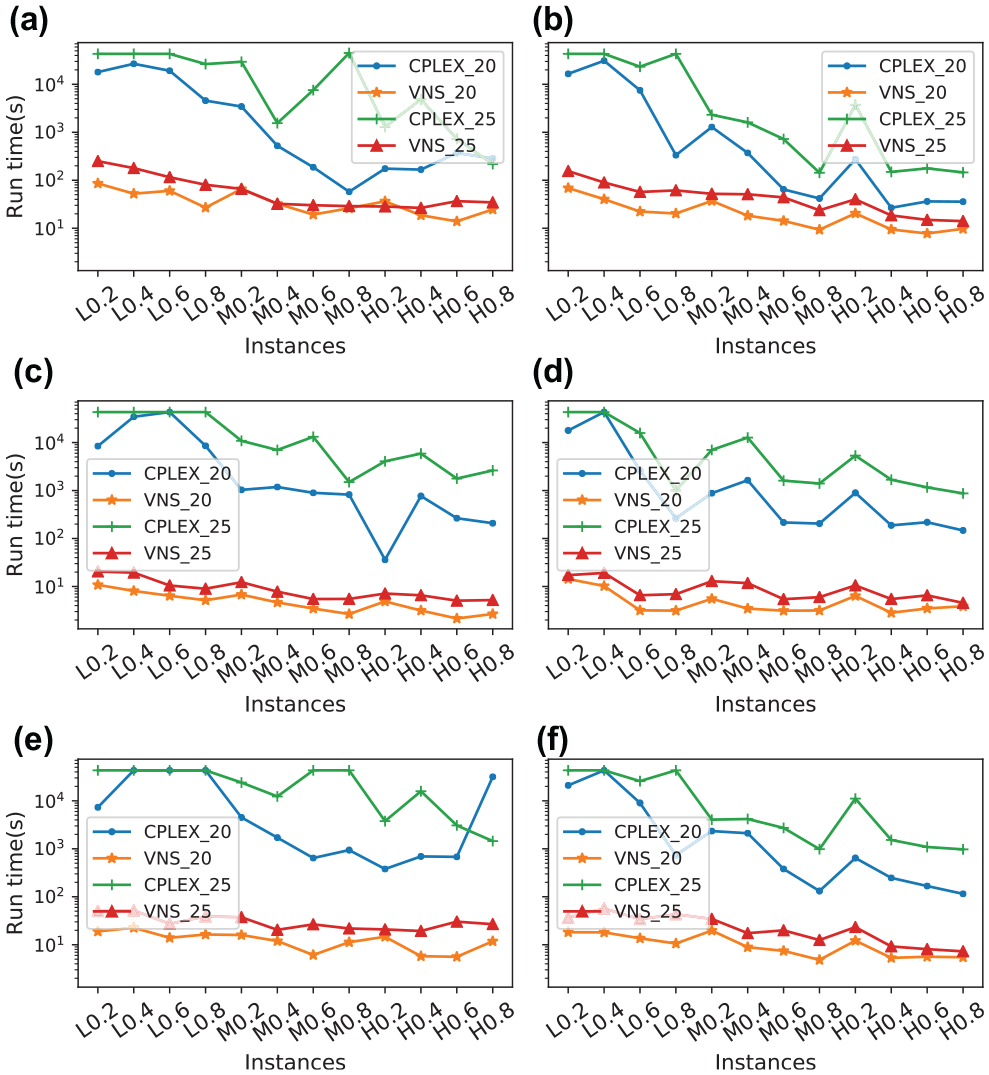
Run time of instances with high revenue solved by CPLEX and variable neighborhood search (VNS). The revenue is 2,000; the number of nodes is
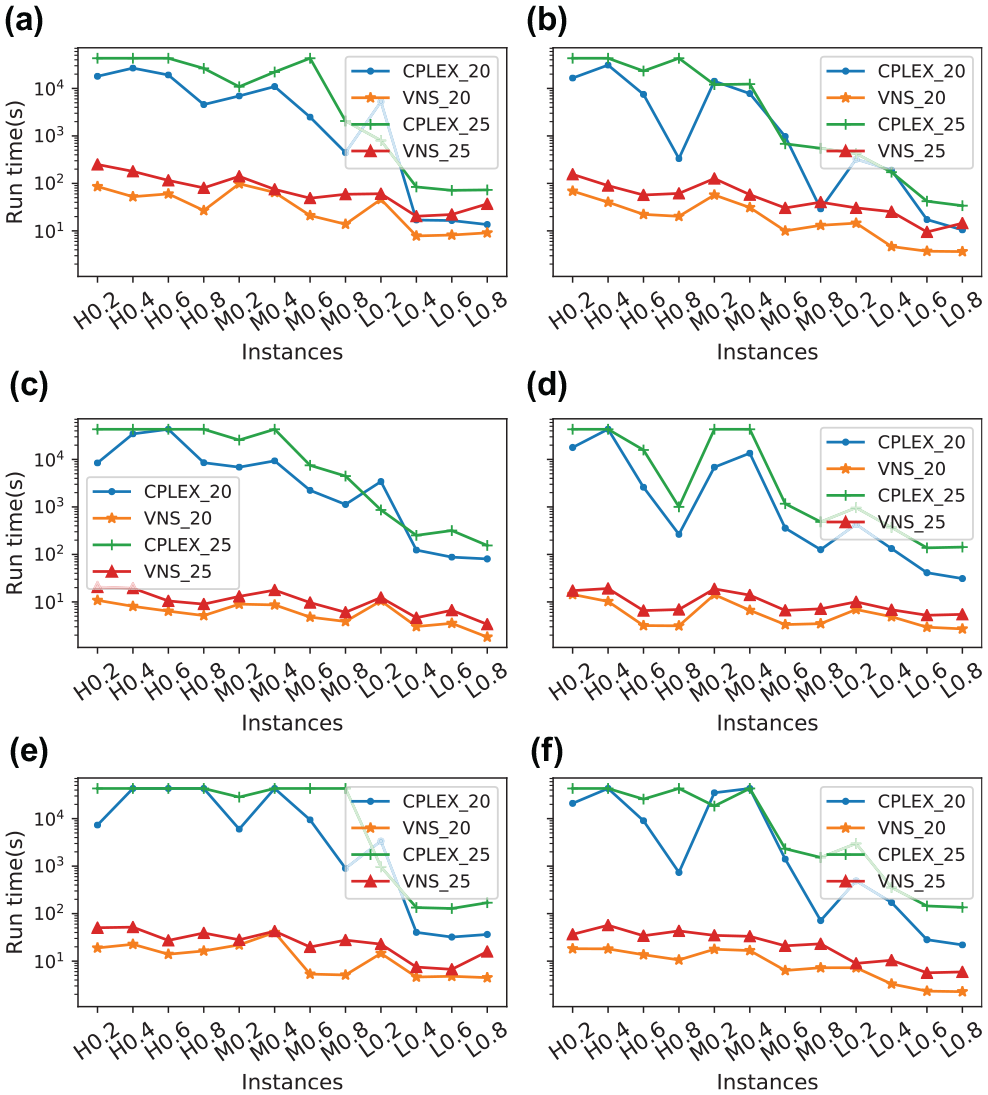
Run time of instances with low hub installation costs solved by CPLEX and variable neighborhood search. The number of nodes is
Discussion of VNS-Based Heuristics Setups
Initial Solution
This section compares the determined initial solution with random initial solutions. The determined initial solution is generated by picking up nodes ranking the first
Comparison of Determined Initial Solution and Random Initial Solution
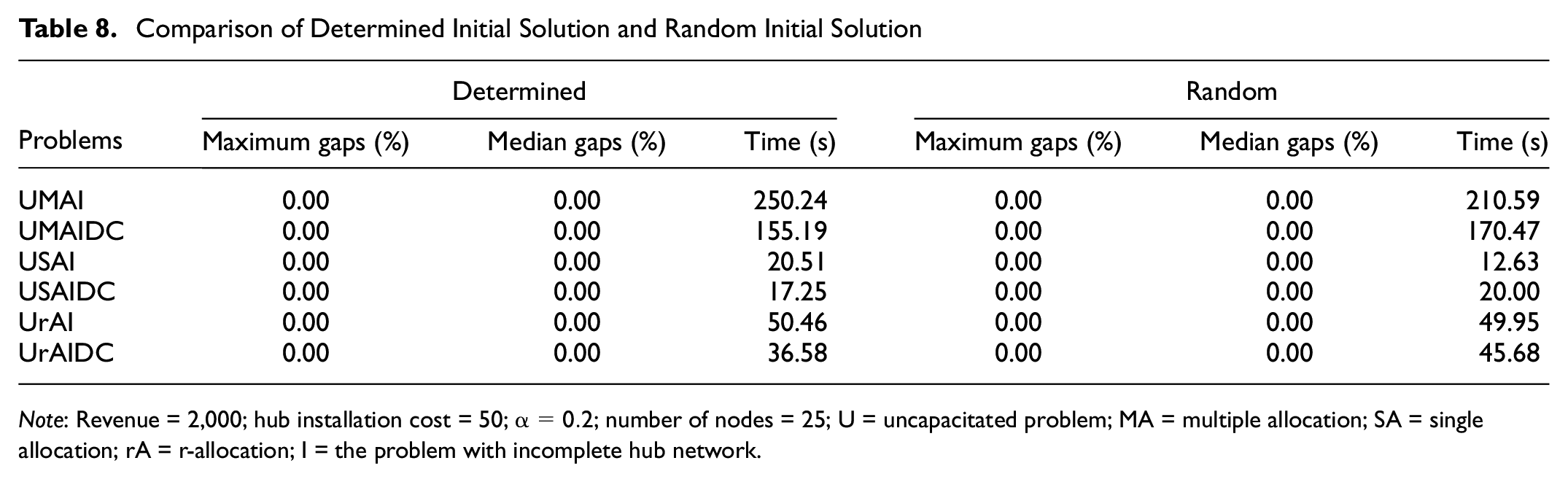
Note: Revenue = 2,000; hub installation cost = 50;
Value of
and
To balance the solution quality and efficiency of the algorithms, the maximum number of iterations
Comparison of Performance of Variable Neighborhood Search-Based Heuristics With Different Values of
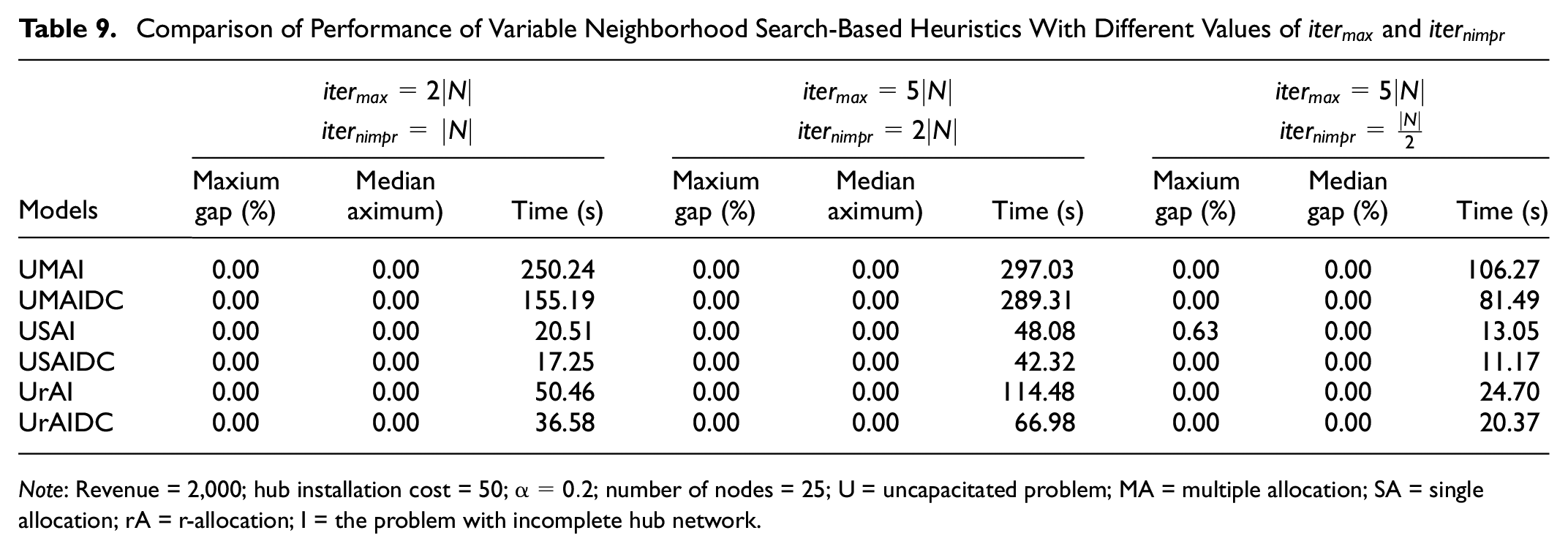
Note: Revenue = 2,000; hub installation cost = 50;
Results for Larger Instances
This section presents the test of the heuristics on larger network instances: the CAB dataset with
Results of Instances With 60 Nodes Solved by Variable Neighborhood Search
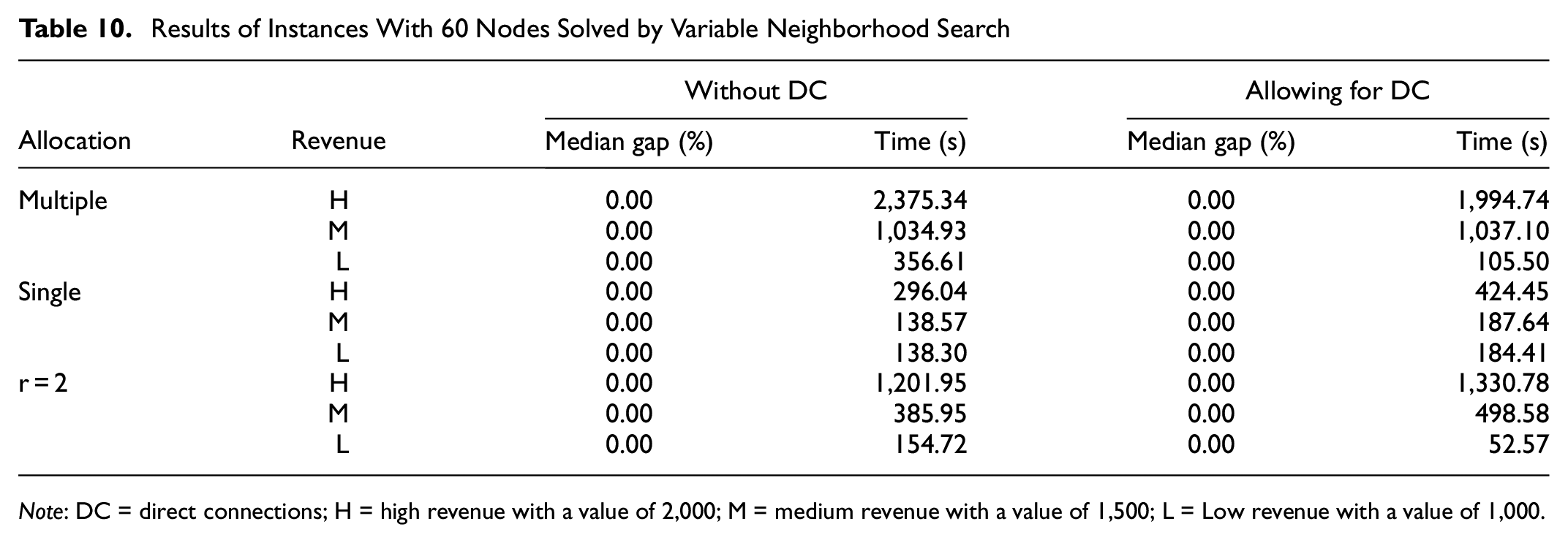
Note: DC = direct connections; H = high revenue with a value of 2,000; M = medium revenue with a value of 1,500; L = Low revenue with a value of 1,000.
Note that the heuristics provide solutions for the three instances within 1 h under different allocation strategies. Three instances can be solved to the best known solution according to the gap between the median value and the best solution for each model. VNS solves instances with high revenue of 2,000, which is more difficult than other instances. The proposed heuristics take more time to solve multiple allocation problems than single allocation models and r-allocation models. The longest time is 2375.34 s for the instance with high revenue of 2,000 of UMAIDC.
Conclusion
This paper studies a class of uncapacitated incomplete HLPPs. Six variants for HLPs under different allocation strategies are discussed. To solve these problems, VNS-based heuristics are proposed, which are the first application for variants of HLPPs. An efficient shaking procedure is designed and used among all the VNS-based heuristics. However, the heuristics apply different neighborhood structures in the improvement procedure according to allocation strategies.
In the computational results, CAB datasets are tested to evaluate the performance of the heuristics. The results show that the VNS-based heuristics provide the optimal solutions for over 90% of instances with different models on the CAB datasets within 1 h. The proposed heuristics of different allocation models are faster than both CPLEX and enhanced Benders decomposition. VNS of multiple allocation problems is two orders of magnitude faster than CPLEX, and it is one order of magnitude faster than that of Benders decomposition. VNS of single allocation problems is two to three orders of magnitude faster than CPLEX, and it is one to two orders of magnitude faster than that of Benders decomposition. VNS of r-allocation problems is two to three orders of magnitude faster than CPLEX, and it is one order of magnitude faster than that of Benders decomposition.
Based on the computational results, it can be concluded that VNS-based methods represent promising approaches for solving HLPPs, which may be applied to solve real-life problems in logistics and freight transportation. There are possibilities for extending the proposed heuristic to capacitated variants of HLPPs. To solve the capacitated problems, it is necessary to check the feasibility of capacity constraints and to ensure that the hub has a sufficient capacity for demand flows. In this study, the hub network is incomplete and the flows cannot be computed through a hub by the assignments of spokes directly. Besides, the demand is asymmetric between two nodes. All of these increase the challenge to extend the proposed heuristics to capacitated problems. A way of dealing with these is to allow for violating capacity constraints during the local search and evaluate a solution by a function with penalties. Testing the proposed algorithms to solve capacitated problems will be the subject of future work. Another direction for future work may be to examine the performance of VNS-based heuristics with other search strategies such as nested and mixed strategies ( 57 ) for uncapacitated HLPPs.
Supplemental Material
sj-pdf-1-trr-10.1177_03611981221105501 – Supplemental material for Solving Hub Location Problems With Profits Using Variable Neighborhood Search
Supplemental material, sj-pdf-1-trr-10.1177_03611981221105501 for Solving Hub Location Problems With Profits Using Variable Neighborhood Search by Chunxiao Zhang, Xiaoqian Sun, Weibin Dai and Sebastian Wandelt in Transportation Research Record
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: S. Wandelt, C. Zhang, X. Sun; data collection: C. Zhang; analysis and interpretation of results: C. Zhang, S. Wandelt, W. Dai; draft manuscript preparation: C. Zhang. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the National Natural Science Foundation of China (Grant No. 71731001).
Data Accessibility Statement
The datasets used are standard datasets of hub location problems. The dataset CAB with 25 nodes (CAB25) is available from OR Library (Website: http://people.brunel.ac.uk/∼mastjjb/jeb/orlib/files/phub4.txt). The dataset CAB with 100 nodes (CAB100) comes from O’Kelly (Website: ![]() ).
).
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.