
Abstract
Signal offset for coordinated traffic signal control is traditionally optimized based on posted speed limit, free-flow speed, or average speed among intersections, without considering the variations of travel speed. Variation in travel speed caused by interference on arterials may lead to inaccurate offset estimation, reducing the efficiency of coordination control. Therefore, this study develops an arterial offset optimization method for traffic signal coordination control using real-time speed collected from high-resolution crowdsourced data. The objective of the proposed method is to minimize the average delay on the corridor. The optimization problem is formulated as integer programming, and a genetic algorithm (GA) is utilized to search for the best offset solution. The proposed method is evaluated on a major arterial (Speedway Boulevard) in Tucson, Arizona. In the numerical exercise, the effectiveness and performance of the proposed method are evaluated in various scenarios, including a scenario with non-recurring congestion. The results show that using high-resolution real-time speed data can reduce travel delay time in a coordinated direction by 32.5% and 17.6% when compared with methods using speed limit and free-flow speed, respectively, and the proposed method is more reliable and robust for handling traffic conditions with varying volume and speed.
Keywords
With the number of registered vehicles increasing from 248.7 million to 284.5 million in the U.S. between 2012 and 2019 ( 1 ), the rapid increase in the number of vehicles on the roadways is causing serious problems in the context of traffic mobility and safety. Traffic signals are a major component of traffic control to mitigate congestion and improve safety. Signal coordination is one of the most commonly adopted control strategies on the major corridors in urban areas to reduce the number of vehicular stops at consecutive intersections for delay reduction and safety improvement ( 2 ).
Signal offset is an instrumental signal timing parameter in coordinated signal control, defined as the time relationship between coordinated phases of subsequent traffic signals ( 3 ). The time difference between coordinated phases can be conveniently determined by the travel time between two subsequent roadway intersections along a coordinated arterial. Traditionally, the posted speed limit is used to calculate the travel time for the offset determination. For example, Girianna and Benekohal ( 4 ) used the posted speed limit to calculate the offset in a dynamic coordination model and optimize the offset for network signal coordination. In addition to the speed limit, free-flow speed was also employed to calculate the offset ( 5 ). Estrada et al. ( 6 ) adopted free-flow speed to calculate the offset of passive traffic signal coordination to reduce bus travel time. However, because of the interference on arterials associated with, for example, pedestrian crossings and work zones, most vehicles typically cannot travel at the posted speed limit; thus, the platoon cannot move at free-flow speed, consequently causing an inaccurate offset estimation. Among the previous studies ( 4 – 6 ), most consider the speed limit or free-flow speed and the rest assume the travel speed as a constant regardless of the time change. Compared with the speed limit and free-flow speed, the use of real-time speed poses a viable alternative to obtaining the optimal signal offset ( 7 ).
Real-time speed data can be collected using conventional technologies such as inductive-loop detectors and piezoelectric sensors ( 8 ). With technological advancement, users are now able to collect speed data using novel smart sensors such as microwave radar, video cameras, Bluetooth, and GPS ( 9 ). However, these sensors have some limitations: conventional technologies have high costs of implementation and maintenance ( 8 ); radar and video cameras are usually installed at the signalized intersections and cannot detect the traffic speed on the roadway segments; data collected by Bluetooth sensors have an issue of missing data ( 10 , 11 ); and GPS data are challenging to obtain as a result of privacy and security concerns ( 12 ). Because of these limitations, the accuracy of real-time data is low and the cost to obtain data from the fixed-location sensors is high. Recently, real-time crowdsourced data provided by third-party vendors have gained popularity as they contain reliable real-time speeds on the arterial segments. INRIX is one of the providers of crowdsourced data, which have been proven highly accurate. Jia et al. found that the INRIX data had an accuracy of 80% to 90% ( 9 ). Kim and Coifman ( 13 ) indicated that the INRIX data showed similar patterns of congestion and queue growth to those shown by loop detectors. Therefore, INRIX data can be utilized as an alternative source for offset calculation because of the wide coverage and low cost.
Bandwidth maximization ( 14 , 15 ) is one method used in the common objective function to achieve the optimal offset for the signal timing. One traditional bandwidth maximization model, MAXBAND, was proposed to maximize bandwidths via modifying offsets, as well as cycle time and phasing sequence ( 15 ). Then, many researchers extended this method to consider more detailed attributes, such as volume changes between intersections ( 16 , 17 ), adjusted speed ranges ( 18 , 19 ), cycle time optimization ( 15 , 16 ), and phasing sequence selection for each intersection ( 20 , 21 ). For the abovementioned bandwidth maximization methods, they focus on the traffic flow from a major road, assuming that the traffic flow from side streets is negligible ( 22 ). Thus, minimization of the number of stopped vehicles ( 23 , 24 ), maximization of arrivals on green phase ( 25 – 27 ), and minimization of delay are considered in offset calculation. Minimization of the number of stopped vehicles is applied to reduce the traffic emissions caused by acceleration and deceleration of vehicles. The maximization of arrivals within green duration is utilized to shorten the queue length. In comparison with the above two methods, delay minimization can maximize the travel efficiency of all participants. Therefore, delay minimization is utilized in the proposed method.
In this paper, an offset optimization method is proposed to improve traffic signal coordination with the INRIX data. The objective of the method is to minimize the travel delay of through-moving vehicles at the subsequent intersections, and a genetic algorithm (GA) is used to find the best solution in integer programming because of its effectiveness in signal timing optimization as shown in previous studies ( 28 , 29 ). Numerical experiments are conducted on an urban corridor with three consecutive intersections in Tucson. One month of INRIX data and the ground-truth volume data are collected from the selected corridor. A comparison is conducted to validate the effectiveness of the proposed method using different data, such as the real-time speed, average speed, and speed limit. Then, the study compares and analyzes the effect of using different traffic signal phasing sequences at an intersection in offset optimization. Furthermore, this study compares the performances of the proposed method with two types of data resolution to present the advantage of the proposed method under non-recurring congestion.
Methodology
In this study, a method is proposed to optimize the signal offset with crowdsourced speed data collected from INRIX to minimize the average vehicle delay. The assumptions for method formulation and notations used in this study are first summarized. Then, the traffic delay formulation is described. Finally, the objective function of the proposed method is formulated.
Assumption and Notations
All assumptions are listed in the following:
A1) The delays of through movement and left-turn movement are considered in the method, while the delay of right-turn movement is ignored ( 18 );
A2) All waiting vehicles are assumed to depart intersections in the following green phase, and their cyclic arrivals are the same in different signal cycles during a period ( 30 );
A3) All vehicles are assumed to discharge with actual speed;
A4) All vehicles are distributed in their specific lane according to their movement, that is, through, left turn, and right turn, at the intersection;
A5) The traffic signal only controls the through and left-turning vehicles but not the right-turning vehicles;
A6) All intersections on the corridor are adapted to the same traffic signal timing plan, including the signal phasing sequence, cycle length, and split; all intersections apply protected-only left turn because it can improve the traffic mobility ( 31 ); and
A7) The volume and velocity are collected for each collection period.
Before introducing the method, we summarize all related variables and list their notations in Table 1.
Notations and Explanations
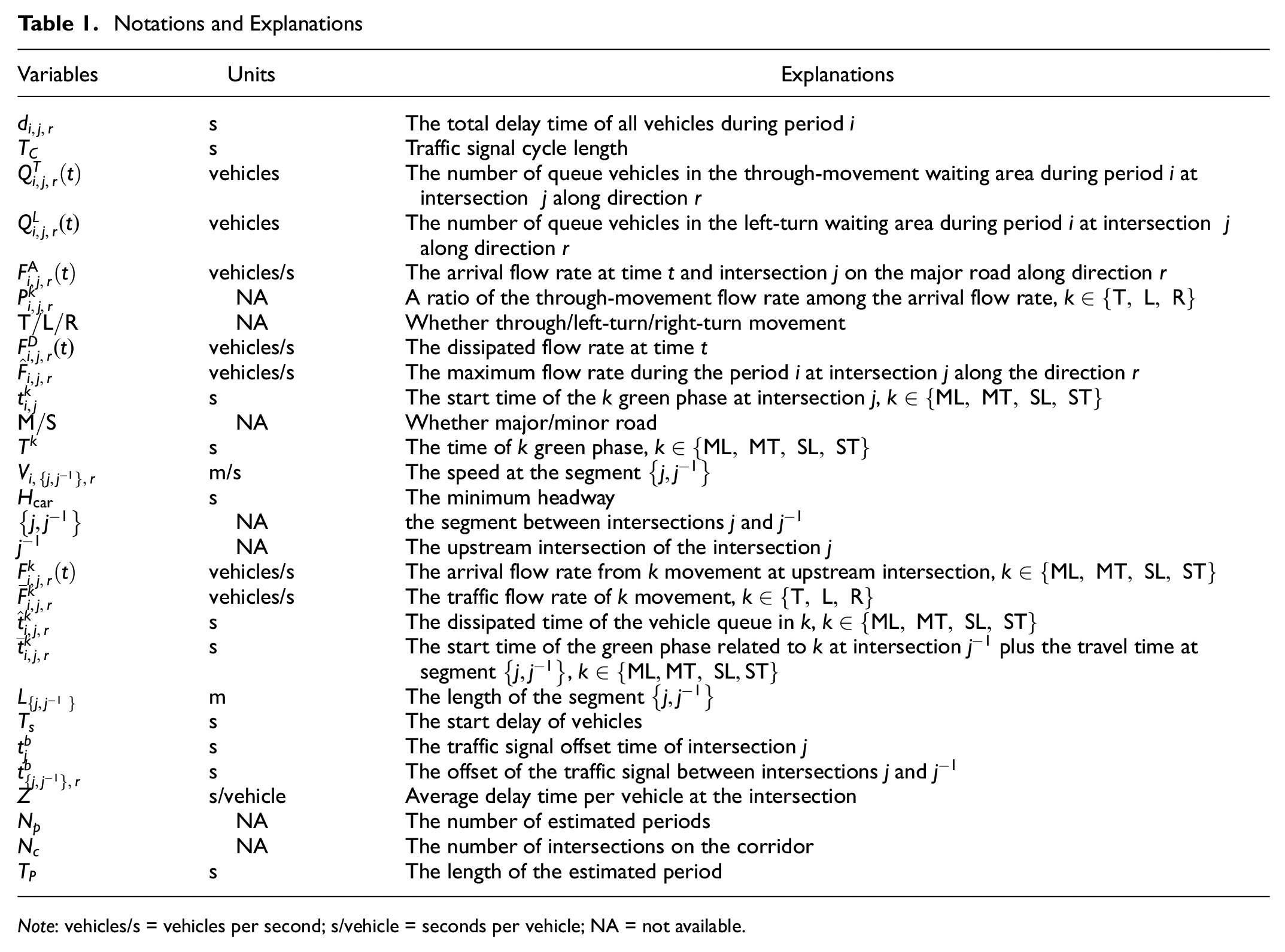
Note: vehicles/s = vehicles per second; s/vehicle = seconds per vehicle; NA = not available.
Traffic Delay Formulation
In the 2010 Highway Capacity Manual (HCM) ( 32 ), control delay has been utilized to measure the level of service at signalized intersections. Control delay is defined as the delay brought by the presence of traffic control devices, such as delay associated with the vehicle’s deceleration, stopping, and acceleration. Several studies mentioned that stop delay and the duration of the vehicle’s stopping were related to the control delay by a multiplier factor ( 32 , 33 ). Thus, the stop delay is considered to evaluate the traffic condition at signalized intersections in the proposed method. According to Assumption A1, the delay is generated by the through-movement and left-turn vehicles and expressed as Equation 1.

where
The method to calculate the queue vehicles in the left-turn movement waiting area
According to the process of queue formation and dissipation, queue length depends on the initial queue length, arrival, and departure of vehicles during the period at the intersection. Derived from a continuum approximation method provided by Newell (
34
), the queue length
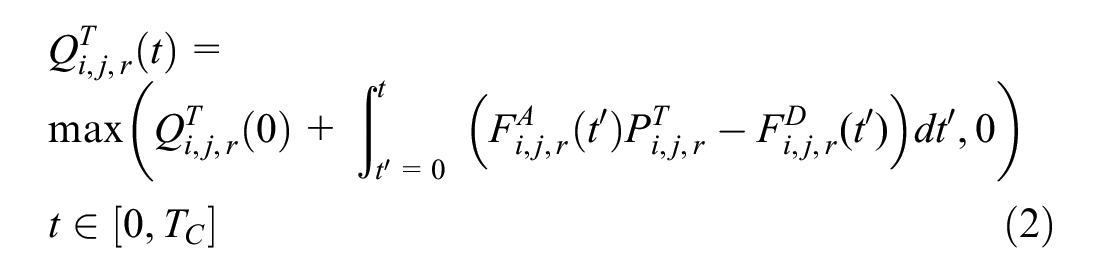
where
Per Assumption A2, the waiting vehicles could dissipate during the next green phase. Because of the same arrival and dissipation flow rates in each signal cycle during the same period, the waiting vehicles at any time
According to Assumption A3, the dissipation flow rate is the maximum flow rate in the green phase and is expressed as Equation 3.

where
The maximum flow rate

where
According to Assumption A4, the arrival flow rate

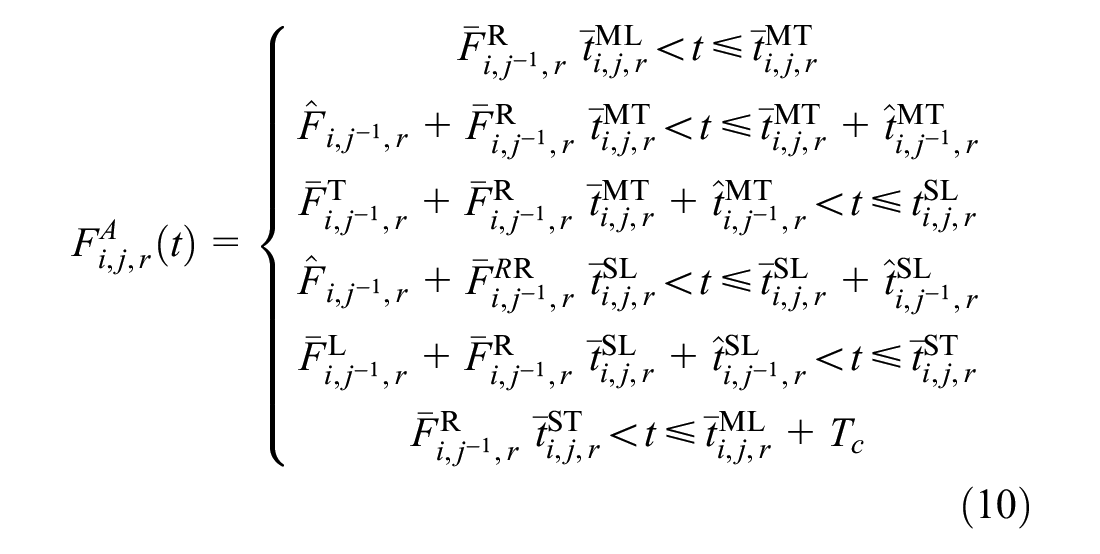
According to Assumption A5, traffic signals control all vehicles except for the right-turn vehicles, which can turn right with a safe gap. Therefore, only vehicles carrying out through and left-turn movement from the upstream intersection arrive at the current intersection during the green duration. In contrast, right-turn vehicles from the upstream intersection can arrive at the current intersection all the time. For the first type of arrival vehicles, they are divided into two statuses according to their arrival time at the upstream intersection: arriving before the queue is dissipated and arriving after the queue is dissipated. Correspondingly, the traffic arrival flow at the current intersection consists of two types of flow rates: the maximum flow rate of queue dissipated and the arrival flow at the upstream intersection. Therefore, the arrival flow rate could be expressed as Equations 6(a–c).
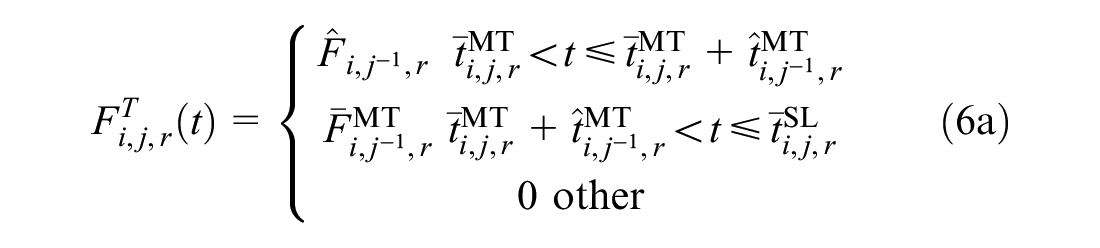
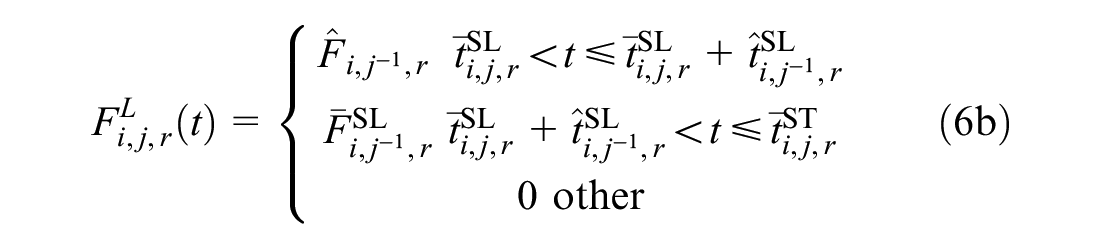

where
in the superscript of the variables, M/S means major/minor road, and T/L/R means through/left-turn/right-turn movement;



where
Given Equations 6(a–c), traffic arrival flow rate
Objective Function
When traffic signal timing parameters are predetermined, the coordinated signal optimization problem is to find the appropriate signal offset time
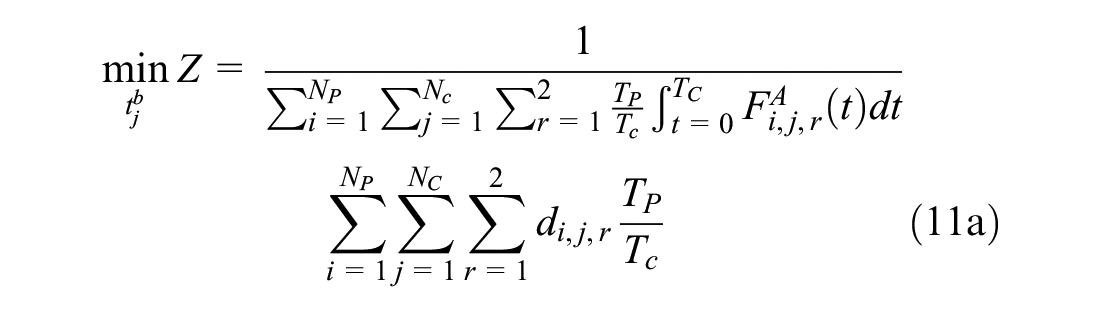
Subject to Equations 11(b–e):




where
Constraint (Equation 11b) presents the relationship of traffic signals between intersections
Solving Algorithm
Although the integration function could be utilized to calculate the delay directly, this calculation is time-consuming, especially in a multi-period problem. Because the arrival and dissipation flow rates are unchanged in each signal cycle during a defined period, the delay time could be calculated from the trapezoid area that consists of queue vehicles and time (Figure 1), according to the previous reference ( 35 ).
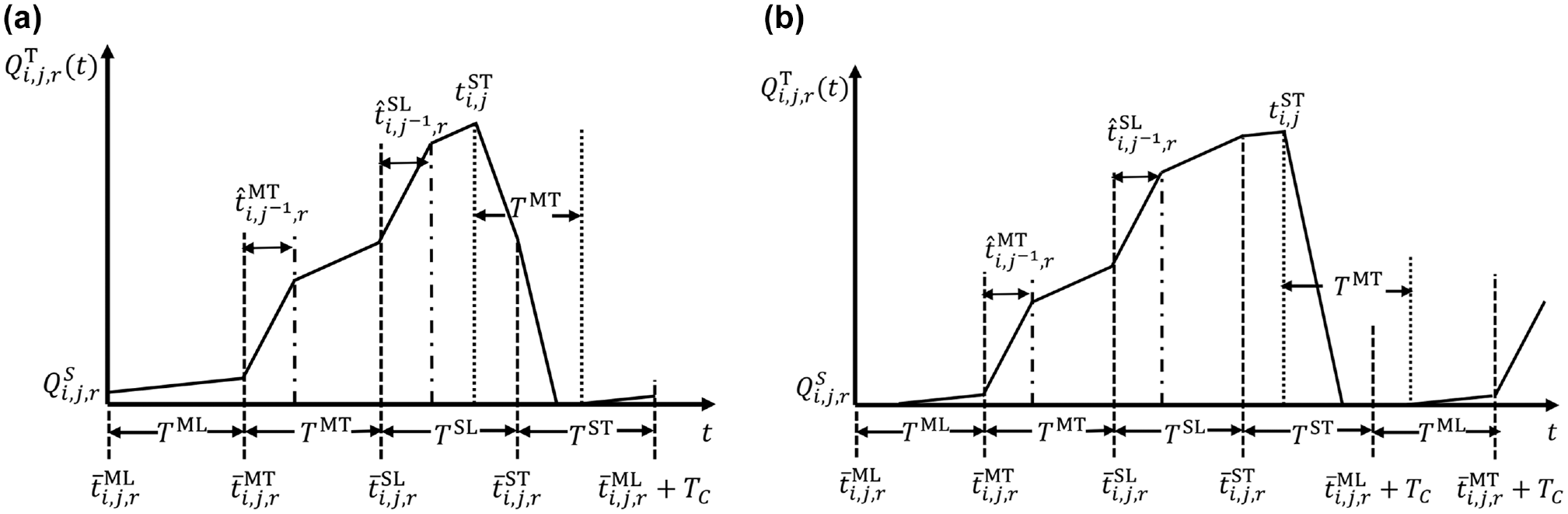
Queue length diagrams: (a)
In Figure 1, the dotted line is the boundary of traffic signal phases at intersection
In the framework of integer optimization problems (Equation 11a), GA is adopted to search for the optimal offset in this study because it has been successfully implemented in previous studies ( 29 , 35 , 36 ).
Numerical Experiments
Numerical experiments are conducted at three intersections on Speedway Boulevard in Tucson, Arizona. The layout of the study corridor is presented in Figure 2. The length of the study corridor is about 2 km with a speed limit of 56 km/h (35 mph) with three lanes in each direction. The length of the two segments between each two successive intersections is 395 m and 807 m. All baseline parameters used for the method are provided as follows:
The time duration of period
The traffic signal cycle and timing of each phase are calculated by the traditional Webster method ( 37 ); and
The minimum safety distance is 30 m between vehicles
Moreover, 1 month of INRIX data and the ground-truth volume data are collected in June 2017. All INRIX segments are coded with standard Traffic Messaging Channel (TMC). The accuracy of the collected data is influenced by the sample size. INRIX analyzes the accuracy of the collected data before publishing them and provides the confidence score to present the reliability of each record. We choose the data with a confidence score of 30, which means that enough base data are available to estimate real-time traffic conditions. Then, 15 min INRIX speed data are aggregated from the 1 min data after removing the data with a low confidence score.
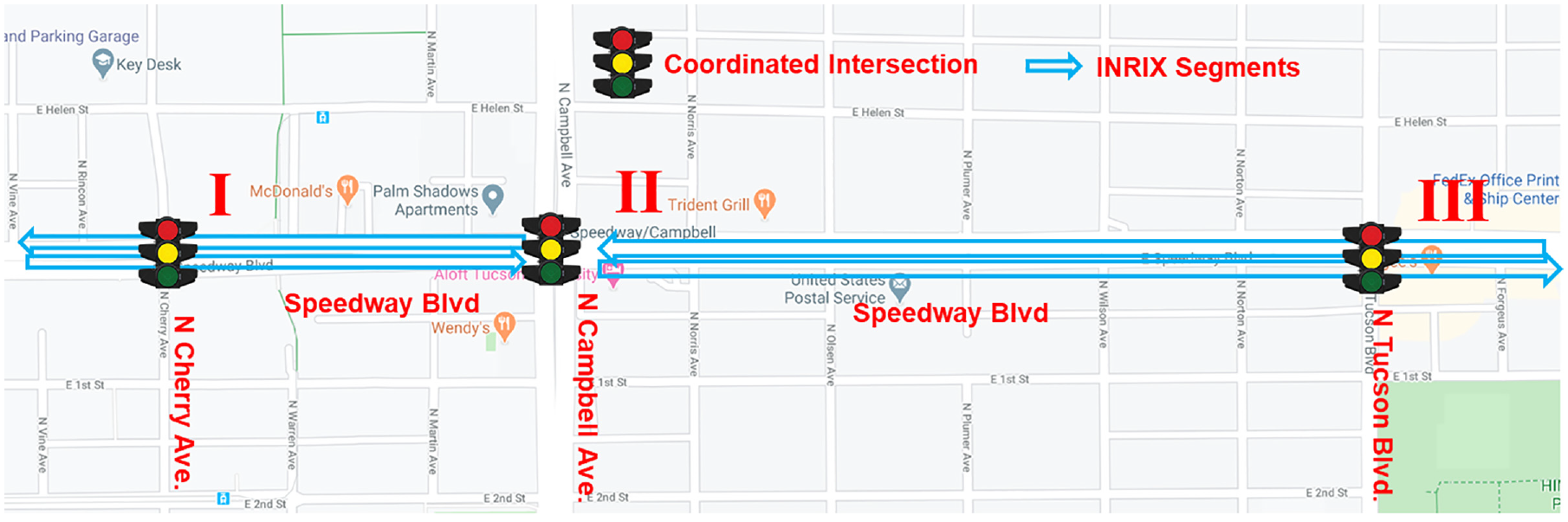
The selected study corridor.
Traditionally, the offset optimization is based on the average speed and speed limit ( 4 , 5 , 35 ); thus, a comparison of three scenarios with different speed data (i.e., the average speed, speed limit, and high-resolution speed data) is first conducted to validate the effectiveness of the proposed method. To quantify the effectiveness of the proposed method, the analysis applies two types of delay time: 1) delay time of through and left-turning vehicles; and 2) delay time in a coordinated direction, which is estimated from the through-movement vehicles on the main street.
This comparison analysis also investigates and tests four types of signal phasing sequences, including:
1) Leading left-turn phasing on major and minor roads;
2) Leading left-turn phasing on major roads and lagging left-turn phasing on minor roads;
3) Lagging left-turn phasing on major roads and leading left-turn phasing on minor roads; and
4) Lagging left-turn phasing on both major and minor roads.
Then, the performances of the proposed method during a day with time-of-day signal plans in the peak/off-peak hours are presented and analyzed. Next, we further evaluate the proposed method using two types of data resolution, that is, 15 min and 1 h intervals.
Method Performance
To validate the effectiveness of the proposed method, a comparison study is first conducted using three scenarios and four types of signal phasing. Three scenarios are developed using three different types of speed,
Scenario A: Average speed during the estimated period between two intersections
Scenario B: Posted speed limit (56 km/h)
Scenario C: Actual speed from high-resolution data
These three scenarios follow all of the assumptions in the “Assumption and Notations” section. The speed and volume data collected from June 7, 2017, 07:00 to 08:00 are used to estimate the performance for the proposed method using three scenarios and four types of signal phasing sequences, and the optimization results are summarized in Table 2.
Summary Comparison of Results
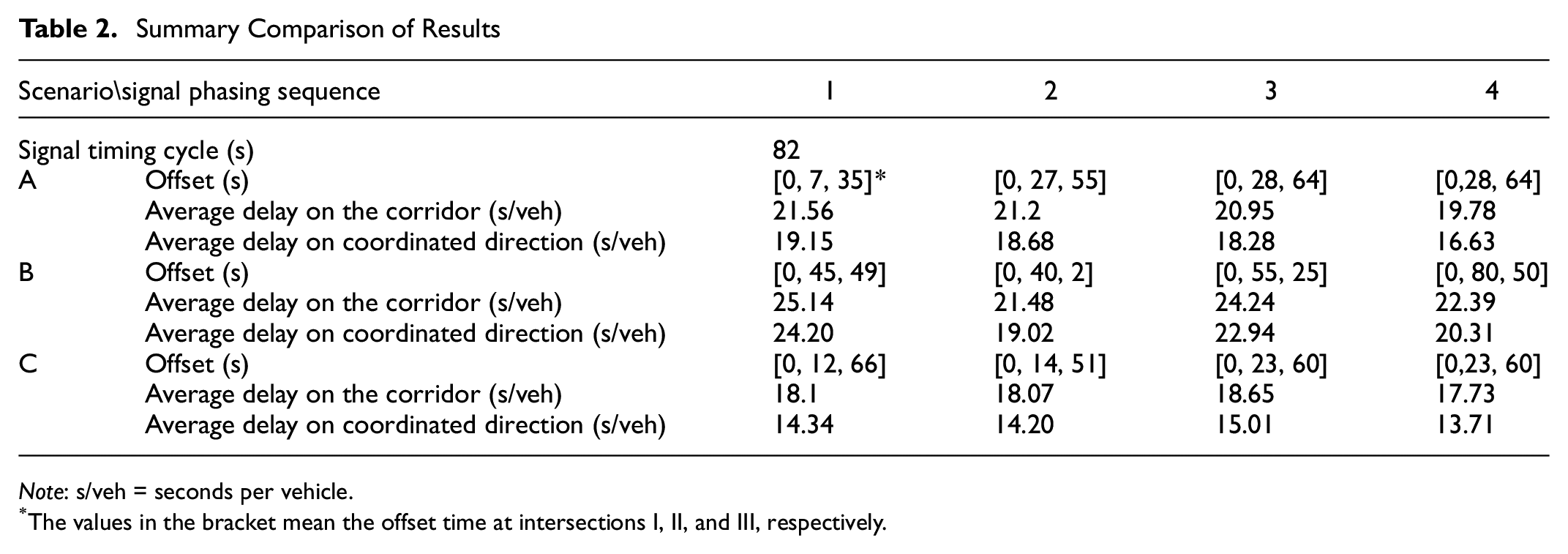
Note: s/veh = seconds per vehicle.
The values in the bracket mean the offset time at intersections I, II, and III, respectively.
The results show that the optimized traffic signal with high-resolution speed data generates the optimal offsets for four types of signal phasing sequences. For the optimized traffic signal with high-resolution speed data, the signal phasing sequence using both lagging left turns outperforms other signal phasing sequences, and the signal phasing sequence with lagging left turn on major roads and leading left turn on minor roads results in the largest delay. When traffic signals use the phasing sequence with lagging left turns on both major and minor roads, the proposed method with high-resolution speed data reduces delay by 10.4% and 20.8% compared with the methods using average speed and speed limit, respectively. The optimized traffic signal with high-resolution speed data can also reduce average delay by 17.6% and 32.5% for through-movement vehicles on the major road (coordinated direction) compared with the methods using average speed and speed limit. The results indicate the effectiveness of the proposed method on offset optimization.
Then, we optimize the signal offsets in three scenarios with 1 day of data to show the method performance in different time periods of the day. Because the traffic pattern in peak hours is significantly different from that in the off-peak hours, we adopt the time-of-day signal plans for the peak/off-peak hours, that is, {00:00–07:59, 08:00–09:59, 10:00–16:59, 17:00–18:59, 19:00–23:59}. Figure 3 presents the temporal trend of the 15 min delay data on the corridor on June 7 in three scenarios using phasing sequence 4. Figures 4 and 5 show the speed and volume distributions on June 7, respectively. It is expected that the optimized traffic signal with high-resolution speed data leads to the smallest delay time, and offset calculation using the speed limit results in the largest for the majority of the time. The validation results further indicate the effectiveness of the proposed method to optimize the offset time for coordinated signals. Furthermore, the difference in delay time is sometimes not apparent between the methods using high-resolution speed data and average speed, such as from 05:00 to 07:00, because of the small variation of velocities. Conversely, the difference is significantly obvious during peak hours, which indicates the need for the proposed optimization method with high-resolution data during peak hours. Moreover, in comparison with Scenarios A and B, the proposed method with high-resolution data reduces the average delays by 1.31 s and 4.41 s with a standard deviation of 1.09 s and 2.21 s, respectively, by using 1 month of data.

Delay comparison on the corridor in three scenarios.
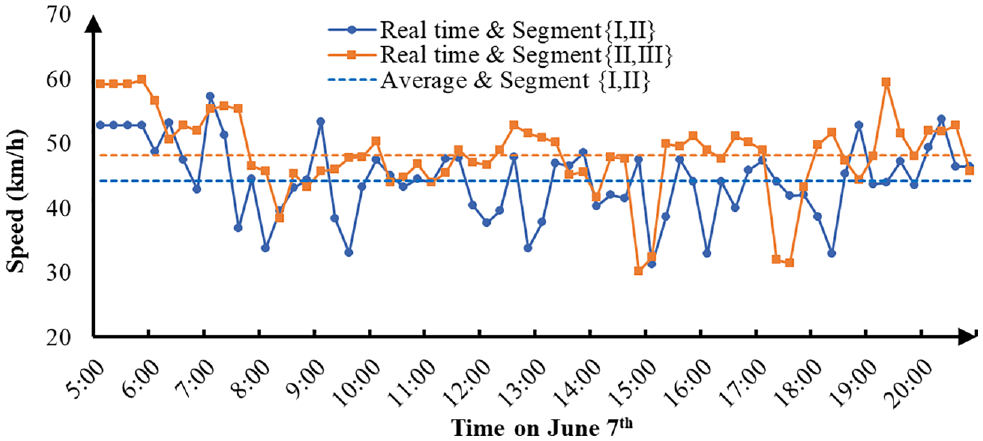
Speed distribution in the eastbound direction on June 7.
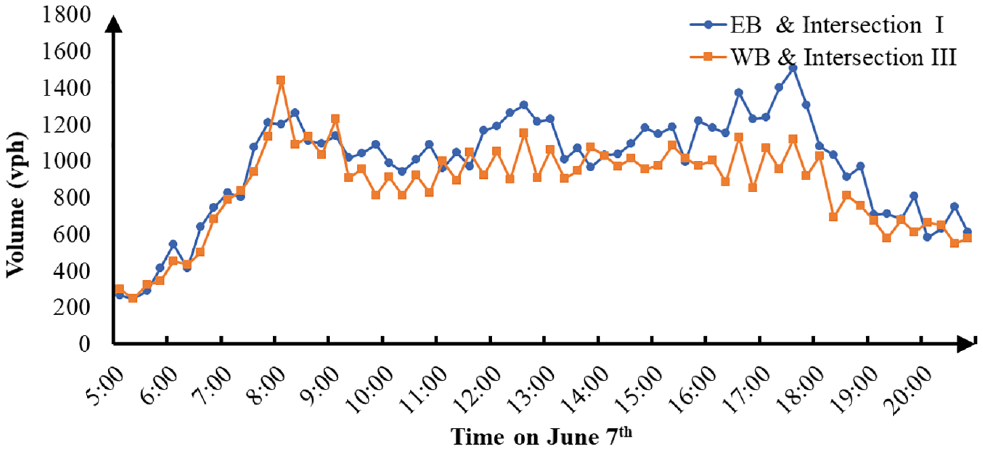
Through-movement volume distribution on June 7.
Evaluation with High-Resolution Speed Data
Some unpredictable events (e.g., traffic accidents) could lead to obvious variation in traffic status during a short period. To quantify the effectiveness of the proposed method to deal with this situation, we compare the performances of optimized signal timing using historical data with different resolution data for 15 min traffic operations. The signal timing is optimized by using former 1 h data with different types of data resolution, one a 15 min interval, that is,
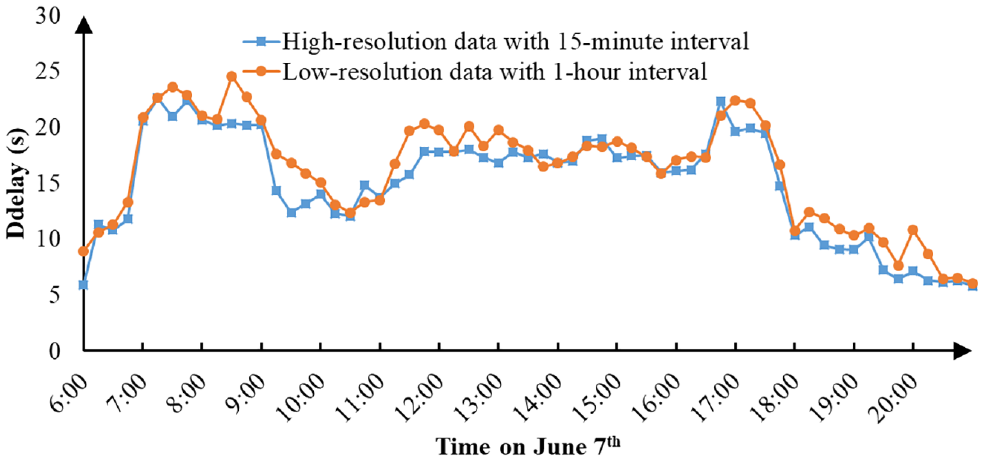
Corridor-level delay with different data resolutions for signal timing optimization.
Conclusions and Future Research
In this paper, a method is proposed for arterial offset optimization in a signal coordination system. Different from the previous research using a constant speed, real-time travel speed provided by INRIX data is used to optimize the offset. The objective is to minimize the travel delay at signalized intersections. The effectiveness of the proposed method is validated for delay reduction. In addition, the study analyzes and evaluates the offset optimization method when using different signal phasing sequences and in different traffic conditions.
This study offers several new insights and important findings. First, among the results of signal timing optimized by the speed limit, average speed, and the varied speed, the delay time is the largest when using the speed limit, and using high-resolution real-time speed data could reduce it by 10.4% and 20.8% compared with methods using average speed and the speed limit, respectively. Second, traffic signal timing with lagging left turn on both minor and major roads is more efficient than other signal phasing sequences. Furthermore, signal timing optimized using high-resolution data could, on average, reduce delay time by 7.5% compared with that under low-resolution data.
It is important to note that some strong assumptions are made to simplify the optimization method. For example, the vehicle velocities are assumed to be the same during the collection period. The delay of right-turning movement vehicles is ignored. In the future, several extensions can be made to the current study: (1) consideration of the stochastic delay to address the speed fluctuation of vehicles, (2) consideration of the right-turning delays, and (3) different intersections on a corridor applying different phasing sequences. Regardless of the abovementioned limitations, the proposed method can be utilized to calculate offset under varying traffic statuses to improve the efficiency of the coordination of signal control.
Footnotes
Acknowledgements
The authors would like to thank the City of Tucson for data support. We would also like to thank Francisco Leyva and Blake Richards for providing valuable advice and technical support in this project.
Author Contributions
The authors confirm the contribution to the paper as follows: study conception and design: L. Xia, X.F. Li, and Y.J. Wu; data collection: X. Liang; analysis and interpretation of results: L. Xia and X.F. Li; draft manuscript preparation: L. Xia, X.F. Li, Y.J. Wu, R.R. Shaon, and X.G. Jiang. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is funded by the City of Tucson, National Nature Science Foundation of China (NSFC 71771191) and the Sichuan Provincial Science and Technology Innovation Talents Fund (2019JDRC0023).