
Abstract
Traffic flow forecasting is the foundation of the dynamic control and application of intelligent transportation systems (ITS). It is also of significant practical value in alleviating road congestion. Given the periodic and dynamic changes in traffic flow and the spatiotemporal coupling interaction of complex road networks, traffic flow forecasting is challenging and rarely yields satisfactory prediction results. To capture the dynamic spatiotemporal characteristics of traffic flow, a new model of traffic flow forecasting based on spatiotemporal convolution and probabilistic sparse self-attention (STC-PSSA) is proposed. It consists of a spatiotemporal graph convolution network (ST-GCN) module, a spatiotemporal convolution module (ST-Conv), and a probabilistic sparse attention module (PSSA). ST-GCN consists of the gated temporal convolutional network (G-TCN) and the graph convolution network (GCN), which are used to capture the temporal dependence and spatial correlation of the traffic flow, respectively. Multiple ST-GCNs are stacked to handle spatial features at various time levels. The ST-Conv captures intricate temporal dependence at the same location and dynamic spatial features at neighboring locations simultaneously. The PSSA combines dynamic spatiotemporal features and performs long-term forecasting efficiently. The experimental results demonstrate that the STC-PSSA model can accurately extract the dynamic spatiotemporal characteristics of traffic flow and outperforms the popular baseline methods in forecasting accuracy.
Keywords
With the rapid urbanization and the increasing complexity of traffic and road networks, accurate forecasting of traffic flows has become an indispensable part of Intelligent Transport Systems (ITS). Traffic flow forecasting aims to predict future traffic conditions based on historical traffic observations and to provide accurate spatiotemporal traffic flow forecasting services to alleviate traffic congestion. Figure 1 shows the common spatiotemporal relationship of traffic flows. Traffic data are recorded at fixed points in time and at fixed locations distributed in continuous space. The observations made at neighboring locations and time stamps are not independent but dynamically correlated with each other. Therefore, the key to solving such problems is to effectively extract the spatiotemporal correlations in the data. The bold line between two points represents their mutual influence strength: the darker the color of the line, the greater the influence. In the spatial dimension (Figure 1a), it can be found that different regions have different effects on point A, and even with the passage of time, the same region has different effects on point A. In the temporal dimension (Figure 1b), the traffic situation at point A will change according to different historical observation times. In conclusion, the correlations in traffic data on the highway network show strong dynamics in both the spatial and temporal dimensions. How to explore nonlinear and complex spatiotemporal data to discover the inherent spatiotemporal patterns and to make accurate traffic flow predictions is a very challenging issue.

Spatial and temporal traffic flow diagram for the morning and evening peaks. The dots indicate residential neighborhoods, the stars indicate schools or companies. The correlation is stronger at the peak hour of 9 a.m. from home to work. The bold line between two points represents their mutual influence strength: the darker the color of line, the greater the influence: (a) spatial influence at different times; and (b) temporal influence between traffic flows.
It is challenging to concurrently capture the dynamic spatiotemporal elements in sophisticated traffic flow modeling using traditional machine learning techniques as those methods depend largely on characteristic engineering. The deep learning-based traffic flow forecasting methods are able to automatically capture features characterizing traffic flow properties and capture the dynamic spatiotemporal characteristics of traffic flow by analyzing time series data. As a result, deep learning strategies have been frequently applied to forecast traffic flow.
To capture the temporal and spatial characteristics of traffic flow, Ma et al. ( 1 ) proposed a traffic flow prediction model combining convolutional neural networks (CNN) and long short-term memory (LSTM) neural networks; CNN extracts local features through convolution and pooling operations. However, for non-Euclidean data such as road networks and meteorological data, the grid structure of CNNs makes it challenging to accurately model unstructured or irregular data, resulting in difficulties in capturing spatial features effectively. To address this limitation, Lv et al. ( 2 ) proposed the use of graph convolutional networks (GCN) to generate graph convolution modules capable of self-learning to capture the spatial features of traffic flows, but the convolution operation of GCN only considers the direct neighbor information of nodes, which is unable to adequately capture the remote associations between nodes and the spatiotemporal dependencies globally. Temporal GCN (T-GCN) ( 3 ) uses the feature matrix and adjacency matrix to capture temporal and spatial information, respectively, and extracts complex temporal dependencies and spatial features through gated recurrent unit (GRU) and GCN, respectively, but GRU may encounter the problem of gradient vanishing or gradient exploding, which makes it difficult to capture temporal dependencies in the far future. Attention-based spatiotemporal graph convolutional networks (ASTGCN) ( 4 ) combine spatiotemporal convolution and attention mechanisms to learn the features of traffic flow in time and space, respectively. However, the spatiotemporal convolution and attention mechanisms in ASTGCN primarily focus on local neighborhoods and relationships between nodes, lacking the ability to model long-term dependencies in traffic flow effectively. To acquire the spatiotemporal characteristics of traffic flow, spatiotemporal graph convolutional networks (STGCN) ( 5 ) combine gated temporal convolutional networks (TCN) and GCN, However, these models, despite taking into account the complex and dynamic spatiotemporal correlation of traffic flow, still need to be improved in model training efficiency as well as accuracy. Spatiotemporal synchronous graph convolutional networks (STSGCN) ( 6 ) construct a local spatiotemporal graph by connecting all the nodes in the previous and next moments to form a spatiotemporal adjacency matrix, and this connection only considers node connections in adjacent moments. However, STSGCNs do not consider node connections at more distant moments and correlations over time spans, which means that they cannot capture longer-term dependencies between nodes. Given the complex spatiotemporal correlation, dynamics, and uncertainty of traffic flow, the problem of traffic flow prediction faces major challenges in modeling, data preprocessing, and model training. This leads to a lack of effective extraction of the dynamic spatiotemporal attributes of traffic flow, resulting in low forecasting accuracy and difficulty in long-term forecasting ( 7 ).
To address the above traffic flow forecasting problem, a new model of traffic flow forecasting based on spatiotemporal convolution and probabilistic sparse self-attention (STC-PSSA) is presented. This model comprises a spatiotemporal graph convolution network (ST-GCN), a spatiotemporal convolution (ST-Conv), and a probabilistic sparse attention (PSSA) block. To capture the dynamic spatiotemporal features of traffic flow, this paper leverages the ST-GCN framework, which excels at capturing the dynamic relationships among graph nodes. By using ST-GCN, the model can effectively capture the evolving spatiotemporal patterns and interactions within the traffic network. Extracted features are fed into the ST-Conv subsequently to fully capture hidden spatiotemporal dependencies. The dynamic spatiotemporal features are fused, and the computational time complexity is reduced via the PSSA. In addition, a supervised and comprehensively trained graph convolution network is proposed. The network builds an adaptive adjacency matrix by learning traffic flow data, providing for effective extraction of dynamic spatial correlation among the traffic flow. Simultaneously, the STC-PSSA model integrates the stacked extended causal convolution network with the probabilistic sparse self-attention mechanism to better capture the dynamic spatiotemporal characteristics of traffic flow and effectively make long-range forecasting.
The main contribution of the paper is as follows:
A novel traffic flow forecasting model, STC-PSSA, is proposed, which combines spatiotemporal graph convolution, spatiotemporal convolution, and a probabilistic sparse attention mechanism. STC-PSSA can not only mine the dynamic spatiotemporal features of traffic flow more comprehensively to enhance forecasting accuracy but it can also lessen the model’s computational complexity.
A spatiotemporal graph convolutional network is set up to capture the temporal dependence of the traffic flow using extended causal convolutional networks with different granularities, and the construction of an adaptive adjacency matrix allows the dynamic spatial correlation of the traffic flow to be further captured. To analyze traffic flow’s spatiotemporal characteristics thoroughly, an additional spatiotemporal convolution block is employed to further capture the complex temporal dependence of traffic flow and the hidden spatial characteristics of neighboring locations.
A probabilistic sparse attention module is created to capture and learn the dynamic spatiotemporal characteristics of the traffic flow, and by adjusting the attention coefficients, the main attention is provided using a few key point products to efficiently perform long-term forecasting and improve the computational efficiency of the model.
Extensive experiments on two data sets show that the STC-PSSA model has better prediction performance than existing baseline methods.
Related Works
After years of continuous research and practice, traffic flow forecasting has achieved many research results in recent decades. In the field of time series, the autoregressive integrated moving average model (ARIMA) ( 8 ) and Kalman filter model ( 9 ) have been widely used in the field of traffic flow forecasting. These early methods studied the time series of traffic flow at each location separately and, in recent years, some studies have started to consider spatial information of traffic flow, such as similar transportation road networks ( 10 ) and external environmental information in different locations. However, these methods are still based on traditional time series models or machine learning models, which cannot capture the complex nonlinear spatiotemporal dependencies well.
For modeling the spatial aspects of traffic flow, the primary approaches include conventional convolutional networks, recurrent neural networks, graph convolution, and others. Traditional convolutional networks are limited to standard grid data and can only extract local features. GCN, on the other hand, can handle nonlinear graph-structured data and efficiently capture the global features of the data. Currently, there are two primary methods for GCN: the space domain-based method and the spectral domain-based method. The space domain-based method extracts node features by aggregating information from its neighbors. This approach is less computationally intensive, but selecting node neighborhoods for this method is extremely challenging. Niepert et al. ( 11 ) proposed a linear method for selecting the neighborhood of the central node and demonstrated that an accurate selection of the neighborhood can significantly boost the accuracy of forecasting. Li et al. ( 12 ) introduced GCN to the task of human action recognition by dividing each node’s surrounding area into separate subgroups and ensuring that each node has an equal number of subsets for efficient extraction of spatiotemporal features. The information on the neighborhood of a node is regarded as prior knowledge that remains fixed during the entirety of the training process. The spectral domain-based method aggregates neighborhood information for each node through spectral analysis. Its limitation is that GCN operates on the whole graph, and it has to process the whole graph every time, so the computational complexity is huge. Therefore, Bruna et al. ( 13 ) proposed a framework for generalized graph convolution that uses Laplace operators to improve the model’s computational effectiveness. Based on the framework of graph convolution, Song et al. ( 6 ) proposed a gated GCN for predicting traffic flow. The model captures the dynamic characteristics of the flow but does not recognize the dynamic temporal and spatial relationships of the flow. It is evident that a GCN-based model for traffic flow forecasting cannot be solely constructed using GCN. Other approaches, such as combining TCN or attention mechanisms, are required to simultaneously capture the spatiotemporal characteristics of traffic flow.
Spatiotemporal GCN is mainly based on recurrent neural networks (RNN), GCN, and attention mechanisms. When RNN is combined with GCN, the model gains the benefits of short-term memory, but its iterative training approach results in significant computational complexity, less efficient processing of long-term sequences, and a greater susceptibility to gradient vanishing or explosion. For instance, He et al. ( 14 ) designed an RNN-based graph convolutional recurrent unit model that filters inputs and hidden states concurrently to detect spatiotemporal correlations for predicting traffic flow. When dealing with spatiotemporal data, the recursive unit model of a graph volume product based on RNN mainly focuses on the dependence between the current time step and the adjacent time step. It pays more attention to local spatiotemporal correlation, but its ability to capture spatiotemporal characteristics in a long time range may be limited. Nevertheless, this network’s capabilities are inadequate for capturing spatiotemporal features that are crucial for long-term forecasting. In contrast, spatiotemporal graph convolution methods based on CNN can improve model training speed significantly. However, when the number of layers in the spatiotemporal graph convolution network is too deep, it can make feature extraction difficult. Additionally, LSTM is employed in CNN-based spatiotemporal graph convolution methods to process complex time series efficiently. Therefore, Bogaerts et al. ( 15 ) proposed a forecasting model that combines CNN-based spatiotemporal graph convolution with LSTM to capture synchronous dynamic spatiotemporal dependencies. The structure of the common spatiotemporal graph convolution is displayed in Figure 2. A spatiotemporal attention module makes the network automatically pay more attention to valuable information. The input adjusted by the attention mechanism is fed to the spatiotemporal convolution module. The spatiotemporal convolution module is composed of a graph convolution product in spatial dimension, which captures the spatial dependence from neighborhood and convolution along the time dimension, and makes use of the temporal dependence of neighboring time. The theory of graph volume product spectrum in spatial dimension extends convolution operation from grid-based data to graph structure data. The traffic network is essentially a graph structure, and the characteristics of each node can be regarded as the signal on the graph. To make full use of the topological characteristics of the traffic network, on each time slice, the graph convolution based on the spectrogram theory is used to directly process the signal, and the signal correlation of the traffic network in the spatial dimension is used. The spectral method transforms a graph into algebraic form to analyze its topological properties. After the convolution operation in the time dimension captures the adjacent information of each node in the space dimension, the standard convolution layer in the time dimension is further stacked, and the signal slice of the node is updated by merging the information of the adjacent time, as shown on the right of Figure 5.

Spatiotemporal graph convolution structure.
Attention mechanisms are rapidly advancing and have widespread applications across multiple domains, including speech recognition, natural language processing, and image processing. As an example, Li and Lasenby ( 16 ) created a neural network for spatiotemporal characteristics that uses a self-attention mechanism to capture dynamic spatiotemporal correlations. Zhang et al. ( 17 ) put forward a graph-based multisensor traffic flow forecasting method that uses temporal attention to efficiently extract dynamic spatial features and intricate temporal dependencies. Zheng et al. ( 18 ) embedded the self-attention mechanism into a GCN to construct a traffic flow forecasting network that captures the dynamic spatiotemporal dependencies of traffic flows. Wen et al. ( 19 ) proposed a transformer-based deep neural network for traffic flow prediction, which introduces a bias vector in relative position coding and automatically learns the relative position information of time nodes when linearly mapping the feature tensor. Historical traffic state information is extracted by an encoder and the decoder autoregressively predicts future traffic states. Bui et al. ( 20 ) proposed a dynamic spatial transformer WaveNet network for multistep traffic flow prediction, in which the time convolution layer is used to capture long time series features and the transformer layer is used to capture dynamic spatial correlations.
While the aforementioned techniques use the self-attention mechanism to capture spatiotemporal dependencies, they generally disregard implicit relationships and concealed spatiotemporal features accumulated within the channel dimensions ( 21 ). This may reduce the model’s capability to capture spatiotemporal features. Therefore, when using the self-attention mechanism, it is very important to construct a good prediction model, and consider the implicit relationship and hidden temporal and spatial characteristics of traffic flow through the self-attention mechanism.
Building on previous research, the STC-PSSA model uses GCN, TCN, and probability-sparse self-attention mechanisms to simulate the facts of traffic flow by combining the topological graphical network structure of the traffic system and the traffic flow’s non-Euclidean data properties. The complex temporal dependencies and hidden dynamic spatial features of traffic flow are fully captured by TCN and GCN, correspondingly. Additionally, the model uses PSSA to further learn dynamic spatiotemporal features of traffic flow and reduce model computational complexity. At the same time, we use the gated fusion mechanism to adaptively fuse dynamic spatiotemporal features fed from the PSSA module. This reduces error propagation in the forecasting process and improves forecasting accuracy.
Methodology
Problem Definition
In this paper, graph
Based on the above relationship, the purpose of traffic flow prediction is to predict the traffic flow in the future time period by giving the historical spatiotemporal traffic data of the past
Framework of STC-PSSA
The STC-PSSA model’s overall structure is shown in Figure 3; it mainly consists of stacked spatiotemporal graph convolutional (ST-GCN) layers, a spatiotemporal convolutional (ST-Conv) module, and a PSSA module. ST-GCN contains G-TCN and GCN. Among them, G-TCN uses dilated causal convolutional networks at different levels of granularity to capture the traffic flow’s temporal dependence. Meanwhile, GCN extracts dynamic spatial features by constructing adaptive adjacency matrices. Each spatiotemporal graph convolutional layer is residually connected. The stacked ST-GCN block can capture the dynamic spatiotemporal features in historical traffic flow data. ST-Conv examines how multiple node features affect individual node features within the traffic flow’s topological structure and also uncovers the underlying temporal and spatial dependencies of ST-GCN inputs. PSSA combines dynamic spatiotemporal characteristics to effectively measure query sparsity. It uses a few key point products for primary attention to reduce the computational complexity of the model and contribute to long-term forecasting. In addition, the STC-PSSA model addresses the dynamic spatial correlations across various time periods by stacking numerous STC-PSSA layers to comprehensively capture the intricate temporal dependencies of traffic flows.

Overall framework of STC- PSSA model.
ST-GCN Block
T-GCN Block contains gated time convolution (gated TCN) and graph convolution (GCN) product. Gated TCN consists of two parallel time convolution modules (TCN-a and TCN-b) to capture the time dependence of traffic flow. GCN further extracts the dynamic spatial characteristics of traffic flow by using an adaptive adjacency matrix. Through the stacked T-GCN Block, the dynamic temporal and spatial characteristics in the historical data of traffic flow are captured.
Gated Temporal Convolution Network
The G-TCN layer presented in this paper implements extended causal convolutional networks to capture the temporal dependency of nodes. By stacking convolutional layers, dilated causal convolutional networks obtain a large sensory field. In addition, dilated causal convolution slides the input into a specific step size and uses a non-recursive parallel computation approach to handle lengthy time sequences. This strategy enhances learning speed and mitigates the issue of gradient vanishing. In this paper, we use an extended causal convolution using kernel 2 and an expansion factor of

where
In recurrent neural networks, gating mechanisms can effectively manage information flow through layers in the network’s temporal convolutional layers. The most basic gated temporal convolution mechanism consists of a single output gate, as illustrated in Figure 4. In G-TCN, TCN-a is mainly responsible for modeling the spatial dependencies between nodes by processing the features of nodes as well as the features of their neighboring nodes using graph convolution operations in the spatial dimension. This allows the information of the nodes to propagate and interact in the graph structure to capture the spatial relationships between the nodes. TCN-b, on the other hand, is mainly used to model the evolution of the nodes in the temporal dimension by processing the features of the nodes at different time steps by using the convolution operation on the temporal dimension, which permits the model to model the dynamics of the nodes’ features in time to capture the temporal dependencies between the nodes.

The gated temporal convolutional network (G-TCN) framework.
Given the input

where
G-TCNs are used to capture complex temporal relationships in the STC-PSSA model.
Adaptive Adjacency Matrix-Based Graph Convolutional Networks
GCN is a fundamental operation for deriving node characteristics from a given node’s structural information. GCN can aggregate and transform neighborhood information into smooth node signals and support multidimensional inputs. Let

The diffusion convolutional network (DCN) simulates the diffusion process of graphical signals with a restricted number of steps and is particularly applicable for spatiotemporal modeling. In this paper, by combining the diffusion convolution network with the graph convolution network, the generalized form of Equation 3 is obtained as follows:

where

Simultaneously, this paper proposes an adaptive adjacency matrix

where

When no graph structure is provided, only an adaptive adjacency matrix is used to extract hidden and dynamic spatial features:

ST-Convolution Block
In a road network, each sensor detects data with a specific periodicity. For instance, on weekdays during the morning and evening peak periods, traffic volume substantially increases, resulting in generally reduced speeds. The concealed spatial properties of traffic flow are strongly correlated with the spacing between different sensors. The spatial characteristics of a road network, such as road layout, lane configuration, and intersection location, remain relatively stable in time. These factors contribute to the spatial characteristics of traffic flow and are not affected by short-term time changes.
As shown in Figure 5, a spatiotemporal convolution module consisting of three kernels is designed in this work. Three kernels corresponding to the temporal, spatial, and spatiotemporal perspectives capture spatiotemporal features extracted from the ST-GCN. This captures the influence of multiple node features on a single node feature in the topological graph structure of traffic flow. The temporal kernel captures the interdependency of traffic streams in the same place during different times, and the spatial kernel captures the spatial characteristics of traffic streams in adjacent places during the same time period. The first ST-Conv Block takes the output of the ST-GCN Block as input, and then each ST-Conv Block takes the output of the previous ST-Conv Block as input, that is,


where

Spatiotemporal convolution (ST-Conv) module framework.
PSSA Block
The form

where

where
The spatial complexity of calculating the point product
STC-PSSA employs

Among them, the first term is the logarithm and exponent of

where
Loss Function
The purpose of training is to minimize the error between actual traffic speed and predicted traffic speed in a road network. In this paper, the mean square error (MSE) is used as the loss function. The actual traffic speed and predicted traffic speed of different sections are expressed by

Experiment
Data Description
In this work, the predictive performance of the STC-PSSA model is validated on the public transit data sets METR-LA and PEMS-BAY ( 23 ). METR-LA consists of traffic speed statistics recorded by 207 sensors on freeways in Los Angeles County over a four-month period. PEMS-BAY includes traffic speed information recorded by 325 sensors on transportation roadways in the San Francisco Bay Area during a six-month period. Both the METR-LA and PEMS-BAY record the detection position, date, and data type. The experimental data set details are presented in Table 1.
Description of the Experimental Data Sets

Since the METR-LA data set lacked a few data, the experiment used linear interpolation to fill in the missing values. The data is subjected to min-max normalization before being fed into the forecasting model, limiting its range to [0, 1]. The normalized formula is:

where
Parameter Setting
This paper uses an 8-layer STC-PSSA network with an expansion factor sequence of 1, 2, 1, 2, 1, 2, 1, 2. Meanwhile, the graph convolutional network layer employs Equation 5 and the diffusion step is



where
Baselines
This paper compares STC-PSSA with the following models:
(1) HA ( 23 ): historical average. The average value of historical and current traffic flow is involved as the prediction value for the next step. In the baseline method, the average of the past 12 time slices in the same period as a week ago is used to predict the current time slice.
(2) VAR ( 24 ): vector autoregression. In the baseline method, (p, d, m) is set to (1, 1, 1).
(3) SVR ( 25 ): an extension of the support vector machine (SVM) classification in regression problems. The insensitive loss coefficient ε is set as 0.1 and the penalty factor C is set as 1.0 according to the grid search method.
(4) FNN ( 25 ): feedforward neural network. The neural networks are L2-regularized and have two hidden layers.
(5) ARIMA ( 26 ): autoregressive integrated moving average. A popular model used in time series prediction. The orders of autoregression, difference, and moving average are the three crucial parameters for the ARIMA model. In the baseline method, (p, d, q) is set to (4, 1, 1).
(6) FC-LSTM ( 26 ): fully connected long short-term memory, which is a classic RNN for learning time series and making predictions by fully connected neural networks. In the baseline method, the number of hidden layers is set to 1 and the number of hidden units is set to 64.
(7) WaveNet ( 27 ): abbreviation for an improved WaveNet network for multistep-ahead wind energy forecasting. CNN for predicting sequence data. The number of stacked layers in this model is set as eight with the dilation rate [1, 2, 1, 2, 1, 2, 1, 2, 1, 2] and the hidden dimension is set as 64.
(8) Graph WaveNet ( 28 ): abbreviation for Graph WaveNet for deep spatiotemporal graph modeling, which is constructed by the GCN and the gated temporal convolution (gated TCN) layer. Each layer in this model contains a gated TCN and a spatial GCN. The number of stacked layers in this model is set as eight with the dilation rate [1, 2, 1, 2, 1, 2, 1, 2, 1, 2] and the hidden dimension is set as 64.
(9) STGCN ( 6 ): spatiotemporal graph convolutional network, which employs the graph convolutional layers and convolutional sequence layers. The number of spatiotemporal cells is set as two and the hidden dimension is set as 64.
(10) ASTGCN ( 4 ): attention-based spatiotemporal graph convolutional networks, which employ the attention mechanism to capture the spatiotemporal dynamic correlations. Similar to STGCN, there are two spatiotemporal cells in this model and the hidden dimension is set as 64.
(11) STSGCN ( 5 ): spatiotemporal synchronous graph convolutional networks, which captures the localized spatial and temporal correlations individually. The size of spatial-temporal synchronous graph is set as 3N × 3N, the number of STSG layers is set as three, and the hidden dimension is set as 64 in this model.
In this paper, the models widely used and recognized in related fields are considered when selecting the above benchmark models. These models have been applied in similar forecasting tasks, and their effectiveness has been proved in many studies. To evaluate the performance of STC-PSSA, it is compared with the benchmark model. Methodologically, the selected benchmark model has different algorithms and assumptions from STC-PSSA. Each benchmark model represents a unique method to solve the prediction problem, taking into account various factors such as graph structure, time dependence, and feature engineering. The validity of the method between these models and the proposed STC-PSSA is verified.
Experimental Results
The STC-PSSA model’s performance was compared with 11 standard baseline models for predicting 15 min, 30 min, and 60 min, as displayed in Table 2. On both data sets, the STC-PSSA model demonstrated noteworthy progress in predicting 30-min and 60-min intervals on METR-LA and PEMS-BAY. Besides, MAE and MAPE are second only to STGCN in the 15-min forecast of METR-LA, MAPE is second only to Graph WaveNet in the 15-min forecast of PEMS-Bay, and STC-PSSA exceeds the benchmark model in all indicators.
Comparison of Traffic Flow Forecasting Models on METR-LA and PEMS-BAY
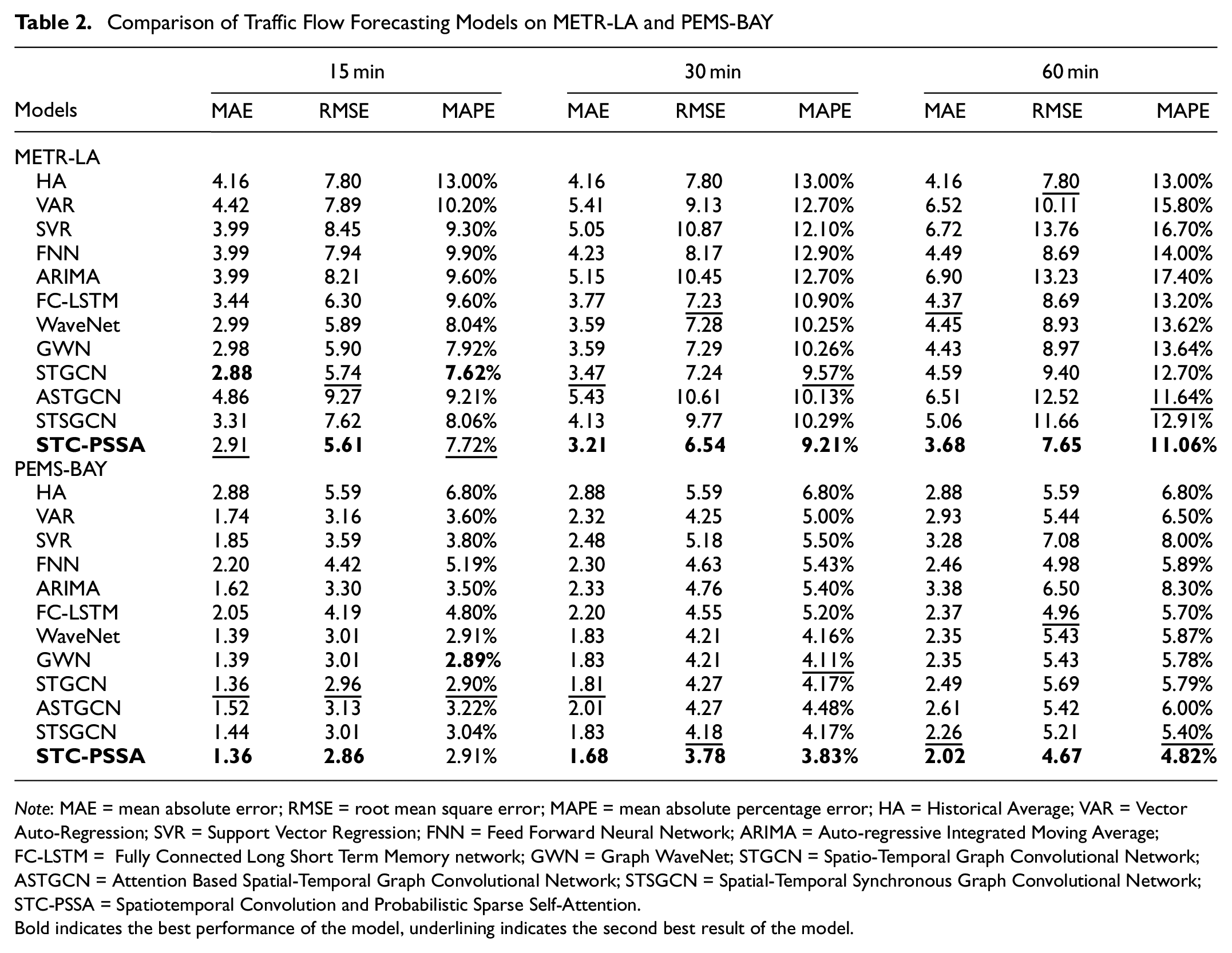
Note: MAE = mean absolute error; RMSE = root mean square error; MAPE = mean absolute percentage error; HA = Historical Average; VAR = Vector Auto-Regression; SVR = Support Vector Regression; FNN = Feed Forward Neural Network; ARIMA = Auto-regressive Integrated Moving Average; FC-LSTM = Fully Connected Long Short Term Memory network; GWN = Graph WaveNet; STGCN = Spatio-Temporal Graph Convolutional Network; ASTGCN = Attention Based Spatial-Temporal Graph Convolutional Network; STSGCN = Spatial-Temporal Synchronous Graph Convolutional Network; STC-PSSA = Spatiotemporal Convolution and Probabilistic Sparse Self-Attention.
Bold indicates the best performance of the model, underlining indicates the second best result of the model.
The formula for calculating the percentage increase summarized in Tables 2 and 3 is as follows:
Predictive Performance of STC-PSSA with Three Variants at Different Times
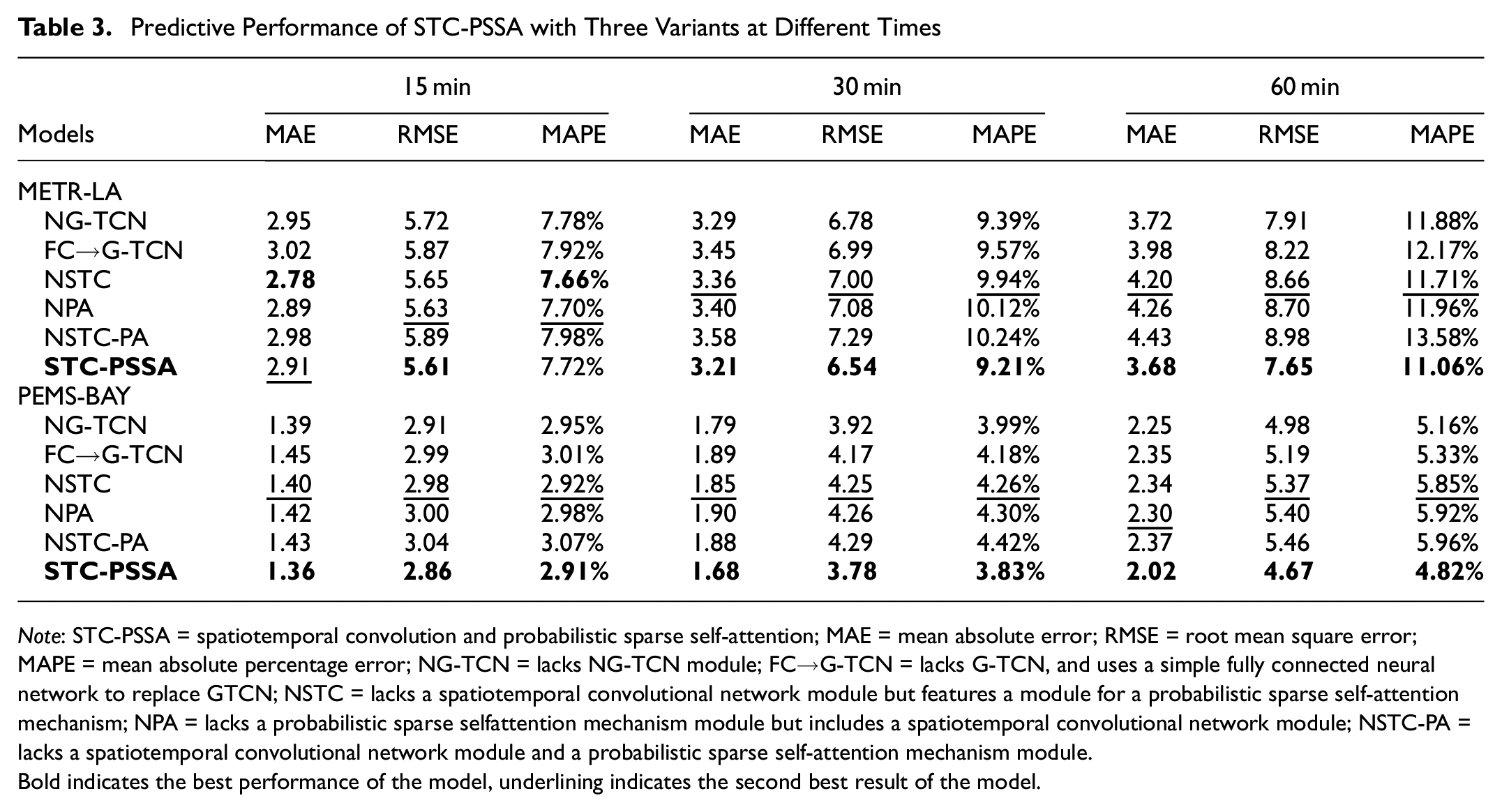
Note: STC-PSSA = spatiotemporal convolution and probabilistic sparse self-attention; MAE = mean absolute error; RMSE = root mean square error; MAPE = mean absolute percentage error; NG-TCN = lacks NG-TCN module; FC→G-TCN = lacks G-TCN, and uses a simple fully connected neural network to replace GTCN; NSTC = lacks a spatiotemporal convolutional network module but features a module for a probabilistic sparse self-attention mechanism; NPA = lacks a probabilistic sparse selfattention mechanism module but includes a spatiotemporal convolutional network module; NSTC-PA = lacks a spatiotemporal convolutional network module and a probabilistic sparse self-attention mechanism module.
Bold indicates the best performance of the model, underlining indicates the second best result of the model.

where
The STC-PSSA model improves over the state-of-the-art method in MAE, RMSE, and MAPE by 7.5%, 9.5%, 3.8%, and 11.5%, 1.9%, and 5.1% for the 30-min and 60-min forecasting on METR-LA, respectively. Correspondingly, on the data set PEMS-Bay, the improvements are 7.2%, 9.6%, 6.8%, and 10.6%, 5.9%, and 10.7%, respectively. Statistical methods (HA, VAR, ARIMA), as well as traditional machine learning methods (SVR, FC-LSTM), exhibit poor forecasting accuracy as they do not take into account spatial correlation. The spatiotemporal graph convolutional network models, specifically STGCN and STSGCN, effectively manage non-Euclidean traffic data and display superior predictive performance. ASTGCN uses the attention mechanism to efficiently capture the temporal dependence of the sequence with better forecasting. Graph WaveNet incorporates GCN into TCN for improved performance compared with ASTGCN and STG-NCDE. However, Graph WaveNet does not incorporate the self-attention mechanism to further capture hidden spatiotemporal features. In contrast, as can be seen from Table 2, the model evaluation metrics of the STC-PSSA model show good performance in both data sets, for the contrasting values of the model evaluation metrics under different time periods, proving the effectiveness of the STC-PSSA model in capturing the dynamic spatiotemporal characteristics of the traffic flow by embedding the GCN into the TCN and combining it with the spatiotemporal convolution and the probabilistic sparse self-attention mechanism. The construction of an adaptive adjacency matrix and the stacking of GCN spatiotemporal layers with different parameters effectively capture the dynamic associations of hidden nodes in road networks over time. In addition, the STC-PSSA model uses stacked expansive causal convolutional networks and a probabilistic sparse self-attention mechanism to perform effective long-term forecasting. Compared with the baseline model, the STC-PSSA model exhibits the most outstanding predictive performance. Moreover, as the testing time increases, the STC-PSSA model showcases superior training performance, higher predictive accuracy, and excellent long-term forecasting capabilities.
In addition, Figure 6 shows the actual and predicted values of STC-PSSA at the 30th and 60th min at nodes 700 to 1,200 in the PEMS-BAY data set. Obviously, all the models show good prediction accuracy and successfully capture the temporal and spatial characteristics of traffic flow.

Visualization of traffic prediction on PEMS-BAY data set.
Ablation Experiment
To examine the effectiveness of different modules of the STC-PSSA model, this paper presents three variants of the STC-PSSA model and evaluates the impact of the spatiotemporal convolutional layer and multihead probabilistic sparse self-attention mechanism on model forecasting performance. And the three variants are compared with the STC-PSSA model for 15-min, 30-min, and 60-min traffic flow predictions on the METR-LA and PEMS-BAY data sets, as shown in Table 3.
The distinctions between these five variant models and the STC-PSSA model are as follows:
NG-TCN: This model lacks NG-TCN module.
FC→G-TCN: This model lacks G-TCN, and uses a simple fully connected neural network to replace G-TCN.
NSTC: The model lacks a spatiotemporal convolutional network module but features a module for a probabilistic sparse self-attention mechanism.
NPA: The model lacks a probabilistic sparse self-attention mechanism module but includes a spatiotemporal convolutional network module.
NSTC-PA: The model lacks a spatiotemporal convolutional network module and a probabilistic sparse self-attention mechanism module.
As can be seen from the table, the fully connected neural network can learn the nonlinear relationship of input data, and it cannot effectively capture the time sequence information of input data, because the fully connected layer does not explicitly consider the order and time dependence of input data. In contrast, G-TCN can capture the long-term dependence in time series data by introducing a gating mechanism, and can better model the time series characteristics and relationships in traffic data, thus improving the accuracy of traffic flow prediction. A diffusion graph convolution network can consider a wider range of neighbor nodes by diffusion operation on the graph. In contrast, the traditional graph convolution network usually only considers the information of the directly adjacent nodes. By considering a wider range of neighbor relations, the diffusion graph convolution network can better capture the global structure and interaction between nodes. In addition, when dealing with sparse graphs or graph data containing missing data, the traditional graph convolution network may face challenges. The diffusion graph convolution network can spread information on the graph through diffusion operation, and alleviate the problems caused by sparsity and incomplete data. It can use the information of neighboring nodes to fill the missing values and improve the robustness of the model.
Compared with the NSTC, NPA, and NSTC-PA models, the STC-PSSA model on the PEMS-BAY data set decreased by approximately 2.94%, 4.22%, and 4.90% in 15 min, and the RMSE decreased by approximately 4.20%, 4.67%, and 6.29%, respectively. At 30 min, the MAE decreased by approximately 10.12%, 11.58%, and 11.90%, respectively, and the RMSE decreased by approximately 13.94%, 11.27%, and 13.49%, respectively. At 60 min, the MAE decreased by approximately 15.84%, 12.17%, and 17.33%, respectively, and the RMSE decreased by approximately 14.99%, 13.52%, and 16.92%, respectively. Similarly, the STC-PSSA model achieved excellent forecasting performance on the METR-LA data set. It is thus demonstrated that the PSSA and ST-Conv proposed in this paper can efficiently process long-term sequence data and perform forecasting. At the same time, it is demonstrated that the embedding of GCN into TCN can be efficient in capturing the temporal and spatial correlation of the traffic flow simultaneously and in dealing with the spatial characteristics of various time levels, which makes the forecasting performance of the STC-PSSA model far exceed that of the baseline model. Furthermore, Table 3 demonstrates that the STC-PSSA model exhibits enhanced predictive capabilities for future traffic flow with an increase in training duration.
As shown in Table 4, the calculation time cost of training and reasoning of STC-PSSA and the other three methods on PEMS-BAY data set are shown.
Comparison of Computation Time of Different Models

Note: GWN = Graph WaveNet; STGCN = Spatio-Temporal Graph Convolutional Network; STSGCN = Spatial-Temporal Synchronous Graph Convolutional Network; STC-PSSA = Spatiotemporal Convolution and Probabilistic Sparse Self-Attention.
Bold indicates the best performance of the model, underlining indicates the second best result of the model.
The STC-PSSA model designed in this paper is operated by efficient graph convolution and the model is able to handle large-scale traffic prediction tasks effectively. This scalability ensures the applicability of the model in real traffic networks without degrading the performance. Meanwhile the STC-PSSA model incorporates a spatiotemporal graph convolution network and a PSSA mechanism. The combination enables the model to effectively capture spatial dependencies and temporal dynamics in traffic data. Several potential optimization strategies are explored to improve computational efficiency. Small batch training and model parameter optimization are used in the implementation of the STC-PSSA model, aiming to increase the computational speed and reduce the training and inference time. It can be observed that STGCN takes the longest time because of stacking multiple GCNs, while STC-PSSA takes a little longer than STGCN, but its prediction performance is more accurate. In addition, compared with Graph WaveNet (GWN), STC-PSSA has achieved better results in time consumption and prediction accuracy. Through the reasoning of the PEMS-BAY data set, STC-PSSA is the most efficient model, and it takes less time to obtain the highest prediction accuracy.
To visualize the role of the probabilistic sparse self-attention mechanism in STC-PSSA, in this paper, subgraphs containing 10 nodes each from PEMS-BAY are selected and the attention matrices between the nodes are visualized, as shown in Figure 6. In the attention matrix, the first row indicates the correlation strength between each node and the first node. For example, the first row in Figure 7a shows that the traffic flow of the 0th node has the highest degree of correlation with the 5th and 9th because these three nodes are similar in the real road network, as shown in Figure 7b. Therefore, the model in this paper not only has the best prediction performance, but also has the advantage of interpretability.

The attention matrix between nodes is visualized: (a) the attention matrix obtained by the probabilistic sparse attention mechanism on PEMS-BAY; and (b) approximate position of the 10 nodes on the real road network.
To provide a clearer understanding of the STC-PSSA model, this paper presents visualizations of its experimental results, using FNN, FC-LSTM, Graph WaveNet, and STGCN on the PEMS-BAY data set, as depicted in Figure 8. It is evident from the three figures that the STC-PSSA model outperforms the FNN, FC-LSTM, Graph WaveNet, and STGCN models in predicting traffic flow. This suggests that the model is better at capturing the dynamic spatiotemporal features of traffic flow. Meanwhile, as the forecasting duration increases, the increase in forecasting error becomes smaller. When the forecasting duration exceeds 15 min, the forecasting errors of STC-PSSA are significantly smaller than other models compared. This indicates that the forecasting performance of the STC-PSSA model is superior for long-range forecasting.

Visual comparison of different errors. The prediction step indicates time step or prediction step. This represents the interval at which the forecasting model predicts the traffic flow in each time step: (a) MAE results visualization; (b) MAPE results visualization; and (c) RMSE results visualization.
To sum up, the STC-PSSA model provides the best prediction results at different time intervals. The STC-PSSA model can accurately predict traffic flow and capture the temporal and spatial characteristics of traffic flow. This demonstrates the excellent predictive abilities of the STC-PSSA model for traffic flow and its efficacy in traffic forecasting.
Conclusion
This paper presents an effective and accurate traffic forecasting model, STC-PSSA, which not only accounts for the non-Euclidean structure of the traffic network but also properly captures the dynamic spatiotemporal features of the traffic flow, thereby overcoming the problems of insufficient spatiotemporal capture by previous models and the difficulty of dealing with long time series. The STC-PSSA model incorporates the strengths of TCN, GCN, and the probabilistic sparse self-attention mechanism. It captures the intricate time characteristics of traffic flow using G-TCN, followed by capturing the dynamic spatial correlation of traffic flow using an adaptive adjacency matrix based on GCN. It then thoroughly leverages the dynamic spatial and temporal characteristics of traffic flow using the probabilistic sparse self-attention mechanism, which ultimately enhances the precision of traffic flow forecasting. Experiments demonstrate that the STC-PSSA model can capture the dynamic spatiotemporal characteristics of traffic flow effectively and simultaneously, as well as process long-term sequence data efficiently, and the forecasting performance is significantly better than that of the baseline model. As the duration of training increases, the STC-PSSA model exhibits better training performance, which leads to higher accuracy in traffic flow forecasting and better medium- and long-term traffic flow forecasting.
In reality, a variety of external factors, such as the weather and current social events, have an impact on traffic flow forecasting. Future research will take outside factors into account to boost the model’s training efficiency and predicting precision. In addition, the expansion of the STC-PSSA model to large data sets will be further investigated to improve the forecasting time efficiency as well as the forecasting accuracy.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Linbiao Chen; data collection: Xijun Zhang; analysis and interpretation of results: Jie Cao; draft manuscript preparation: Linbiao Chen and Hong Zhang. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Key R&D Program of Gansu Province (23YFGA0063); the National Natural Science Foundation of China (62363022,61663021); the Natural Science Foundation of Gansu Province (22JR5RA226, 23JRRA886); and the Gansu Provincial Department of Education: Industrial Support Plan Project (2023CYZC-35).