In this article, we study the following coupled Schrdinger system with subcritical exponent:
Here, either or is a smooth bounded domain in with ; positive constants and the coupling constant , , is the critical Sobolev exponent. We show that, this system has infinitely many radially symmetric sign-changing solutions and infinitely many radially symmetric semi-nodal solutions. Moreover, we obtain a least energy sign-changing solution for in the following sense: one component is positive and the other one changes sign which has exactly two nodal domains.
We remark that, the existence of infinitely many sign-changing solutions or semi-nodal solutions to (1.2) was solved by Chen et al. (2016) and Liu et al. (2015) independently, where
To the best of our knowledge, the existence of infinitely many sign-changing solutions, infinitely many semi-nodal solutions and least energy sign-changing solutions to (1.1) has not ever been studied in the literature when or , and . The main goal of the current article is to solve this problem (1.1) when .
A solution is called nontrivial if and , called semi-trivial if is the type of or . We call a solution positive if in , a solution sign-changing if both and change sign, a solution semi-nodal if one component changes sign and the other one is positive.
Let , , , and . Then system (1.1) has infinitely many radially symmetric sign-changing solutions.
We also study some further properties of the sign-changing solutions obtained in Theorem 1.1. We call a sign-changing solution a least energy sign-changing solution if it has the least energy among all sign-changing solutions. Precisely, we have the following theorem.
Let , , , and . Then system (1.1) has a least energy radially symmetric sign-changing solution among all radially symmetric sign-changing solutions such that both and have exactly two nodal domains.
Both Theorems 1.1 and 1.2 are concerned with sign-changing solutions. Besides positive solutions (obtained by Wei & Weth, 2008a) and sign-changing solutions, we can prove that (1.1) has semi-nodal solutions as defined in Definition 1.1.
Let , , , and . Then system (1.1) has infinitely many radially symmetric semi-nodal solution such that
is positive and changes sign;
has at most nodal domains.
Finally, we consider the case of the smooth bounded domain .
Let be a smooth bounded domain, , and . Then system (1.1) has infinitely many sign-changing solutions such that
Moreover, system (1.1) has a least energy sign-changing solution such that both and have exactly two nodal domains, where is the first Dirichlet eigenvalue of .
Let be a smooth bounded domain, , . Then system (1.1) has infinitely many semi-nodal solutions such that
is positive and changes sign;
has at most nodal domains.
The structure of this article is as follows. In Section 2, we prove the existence of infinitely many sign-changing solutions. The main tool will be the new vector genus introduced by Tavares and Terracini (2012) and the constrained problem introduced by Chen et al. (2016), we will construct new minimax values. Remark that the ideas by Chen et al. (2016) and Tavares and Terracini (2012) cannot be used directly, and we will give some new ideas. The crucial idea in this article is turning to study a new problem with two constraints in order to obtain sign-changing solutions of (1.1). This idea has never been used for (1.1) in the literature up to our knowledge. Section 3 is then dedicated to the proof of Theorem 1.2 by using a minimizing argument. In Section 4, we will present the proof of Theorem 1.3 by applying the arguments in Sections 2 and 3. Finally, in the last section, we will consider the case of .
We give some notations here. Throughout this article, we denote the norm of by , the norm of by and the positive constants (possibly different in different places) by . Define the radial space as a subspace of with norm where and
Proof of Theorem 1.1
In this section, we consider the case . That is, we consider the following elliptic system in the entire space:
where , , , and . It is well-known that the radial solutions of (2.1) are the critical points of the functional given by the following equation:
We will look for solutions of equation (2.1) as critical points of the functional restricted to the sphere
In order to obtain infinitely many radially symmetric sign-changing critical points, we need to define several minimax energy levels using a new definition of vector genus introduced by Tavares and Terracini (2012). According to Tavares and Terracini (2012), we take the transformations
Consider the class of sets
and for each and , the class of functions
where .
Vector Genus, See Tavares & Terracini, 2012Let and take any . We say that if for every there exists such that . We denote
Note that the definition does not actually define the quantity , but give the meaning of only. A different notion of genus was introduced by Chang et al. (2010).
See Tavares & Terracini, 2012Let is a continuous function such that, for any , , , , then there exists such that , where .
Take and let be a homeomorphism such that for every , . Then , where .
We have whenever and a continuous map is such that
Together with the notation of vector genus, in order to obtain sign-changing solutions, we will use cones of positive or negative functions based on the works such as Conti et al. (1999), Bartsch et al. (2004), and Zou (2008). We define the cone
and take . Moreover, for any , we define
where
It is easy to check that and , where .
For any , there holds whenever with .
For any , define the map
then , so by Definition 2.1, there exists such that . By , we deduce that
therefore, , and so for any .
For technical reasons, we will work on the neighborhood of in (2.3), that is,
Define
Let , suppose that there exists such that the Hessian matrix
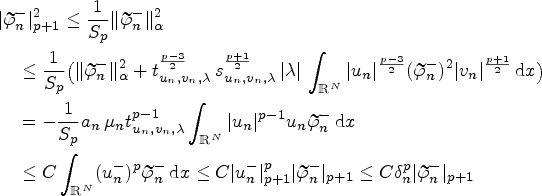
is non-positive definite for all such that , . Let be the sharp constant of the Sobolev embedding ,
If for any ,
then
Take such that
then, as , we get
The conclusion holds.
Let and consider
Note that for ,
Fix and define . We study the set of critical points of . We will show that there is exactly one critical point with nonzero component (and thus maxima) in the first quadrant.
In fact, let be a critical point of , then
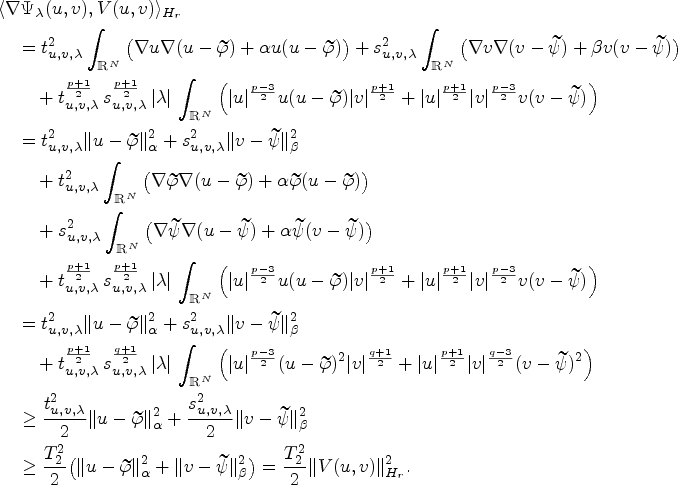
Let and . Define the quadratic form associated to the pair as
We are going to show that for all . We estimate the second derivatives
and
while
Thus we obtain
where the quadratic form is negatively definite by assumption (2.8).
Since as , then must have at least a local maximum in each of the quadrants. has one local minimum at the origin, providing a local degree ; has exactly four critical points with one null component having index . Let be the number of local maxima, by the excision property of the degree it must hold:
that gives , where is a suitably large ball. Thus there are exactly four critical points with nonzero components and thus maxima, one in each of the quadrant. Now we define as the unique local maximum of in the first quadrant, so is unique.
Note that for , , by (2.12), we can choose some positive constant such that for any , therefore, . By (2.9), for any ,
Thus, we obtain
Hence, there exists such that for any ,
For any , the following linear problem:
has unique solution and
So we can define
then is the unique solution of
Let . Take nonempty open radially symmetric subsets with . Define
There is an odd homeomorphism from to , . By Lemma , one has . For any , there holds and . Since all the norms of a finite-dimensional linear space are equivalent, there exist constants such that and , hence
Define
Observe that , when and . We are now ready to define a sequence of minimax energy levels which will turn out to be critical levels for over . For every and , define
It is easy to see that for any , and , there holds
and is continuous on . Moreover,
therefore, .
As a step towards to the proof of Theorem 1.1, we will prove that is indeed a critical level of for sufficiently small. In order to prove Theorem 1.1, it is necessary to find a pseudogradient for over for which is positively invariant for the associated flow. We can now define the operator
that is, for any , is the unique solution of (2.16). It is easy to prove that , .
Now, we give some property of the operator . We can now prove that is a compact operator.
The operator is of class .
Define map , , by
and
then by (2.16), . Moreover, the derivatives of and with respect to at the point and in the direction , respectively, are
and
We claim that and are bijective maps. In fact, for any , the following linear problems:
have unique solutions , by , then we define
we have
so is surjective. Similarly, is surjective.
If , then
so , , by , , we have , this implies is injective. Therefore, is bijective. Similarly, is bijective map. Then we can apply the implicit function theorem to the maps and , we have the conclusions.
Let be bounded in . Then there exists such that, up to a subsequence,
Similarly, we have . Therefore, we have strongly in and satisfies
Since , so , and
We see that
This completes the proof.
For any sufficiently small, satisfying , , then there holds
Suppose by contradiction that there exists and satisfying , and . We suppose that without loss of generality. Then and
we get that are bounded in , we have
and . Moreover,
so we have . This together with (2.9) and (2.16) allow us to get
and hence for sufficiently large, which is a contradiction. This completes the proof.
Now define a map
It is easy to prove that , . We will prove that if , , then is a sign-changing solution of equation (2.1). Firstly, we prove that satisfied the Palais-Smale type condition and is a pseudogradient for over . Denote
(Palais-Smale Type Condition) Let be such that
Then there exists such that, up to a subsequence, strongly in and . We also have
Similar as Lemma 2.6, we have, up to a subsequence,
Then we have, as ,
whence
Then strongly in and ,
then we have , .
Finally, we prove that is a pseudogradient for over . Recalling (2.7) and (2.16), it is easy to see that
By (2.17) and (2.18), we have , when , , and . Then, for any , , , there holds
By similar arguments as Lemmas and , there exists such that, for any , , and , there holds . Therefore, has a radially symmetric sign-changing critical point with . Then there exits satisfying
Now define
then is finite. So there exists and such that
For any , there exists open neighborhoods of , , , , respectively, such that
Define
we can choose small enough such that . Since is finite, then by Lemma 2.8, there is such that for any , , we have
We claim that . In view of a contradiction, suppose that . From Definition 2.1, we know that there exists such that for any . Take such that by Tietze’s extension theorem. Define
then , , and , , .
Define the continuous function,
and , . Take such that by Tietze’s extension theorem. Define
then , , , and . Therefore, we can define
then and . Since , , so there exists such that . If , then
a contradiction. Thus , then
a contradiction. Therefore, .
Since , , then we have and . Define , then , , , and by Lemmas 2.2- and 2.3, so . Thus by (2.19).
We claim that for any , . In view of a contradiction, if there exists such that . For , by the continuity of , there exists satisfying , , and for any . Then by (2.31), we have
so , this yields a contradiction.
For , there exists such that satisfies
Moreover, for any , then by Lemma 2.9-(4), for any . Therefore,
In particular, . Moreover, by (2.33) and Lemma 2.9-, we get
hence , so we have and is a least energy sign-changing solution of (2.1). Since and change sign, and have at least two nodal domains. We claim that both and have exactly two nodal domains.
Suppose, in view of a contradiction, that has at least three nodal domains , , , and on . Define
Moreover, from (3.4) to (3.7) and Lemma 3.1, we see that there exists satisfying and . Therefore, and
this yields a contradiction. Hence, has exactly two nodal domains. Similarly, has exactly two nodal domains. This completes the proof.
The Proof of Theorem 1.3
In this section, we obtain infinitely many radially symmetric semi-nodal solutions such that is positive, is sign-changing. We use the same notations as in Section 2 for convenience. Define the functional
where ,
If for any , such that
then
It is easy to prove that Lemma 4.1 by trivial modifications.
As in Section 2, for any , we define
For any , we consider the following linear problem:
Then is the unique solution of the following problem:
We can now also define the operator
Then by similar proofs as in Lemmas 2.5 and 2.6, we have that and satisfies Palais-Smale type condition. Define the map
Consider the class of sets
for each and , the class of functions
To obtain semi-nodal solutions, we should also define cones of positive functions, that is,
thus, is sign-changing if .
Under the new definitions (4.4)–(4.6), we define vector genus, slightly different from Definition 2.1.
Let and take any with . We say that if for every there exists such that . We denote
Take and let be a homeomorphism such that for every . Then .
We have whenever and a continuous map such that
For every and , we define a map
then by (4.6), it is easy to see that is continuous and
Then Borsuk-Ulam theorem yields such that . By Definition , we have .
Fix any , then by (4.6), we have . Since , there exists such that . Then by , we have , that is, . This completes the proof.
Assume . Then for any and , we have .
For any , define by
then , so by Definition , there exists such that We deduce from that . Therefore, and so for any .This completes the proof.
Fixed any , similarly as in Section 2, take nonempty open subsets with , and as in (2.17) and (2.18). We define
By Lemma 4.2-, . Similarly, for any ,
Then we can define
For any and , we define a sequence of minimax energy level,
It is easy to see that
Lemmas 2.7 and 2.8 also hold in the case of the current Section 4.
There exists a unique global solution for the initial value problem
Moreover, of Lemma 2.9 hold and
For any , , .
From the above discussion, we see that . As , we get that , then there exists a solution , where is the maximal time such that (4.8) has s solution .
For any and , there holds
so we have
Since , then for any ,
The rest of the proof is the same as Lemma 2.9. This completes the proof.
The proof of Theorem 1.3.
Observe that from Lemma 2.10, for any , small, there exists such that
We conclude that is sign-changing and . It follows from (4.3) that satisfies:
On the other hand, , we have . Moreover, (4.9) yields
then , so . By the strong maximum principle, . Hence we have that is a semi-nodal solution of with positive, sign-changing and
We claim that (2.1) has infinitely many radially symmetric semi-nodal solutions. Suppose, in view of a contradiction, that there exists , and such that
By similar arguments as in the proof of Theorem , we get a contradiction. Thus, (2.1) has infinitely many radially symmetric semi-nodal solutions with positive and sign-changing. We claim that has at most nodal domains. Suppose, in view of a contradiction, that has at least nodal domains , , then and
Thus it implies a contradiction and, therefore, has at most nodal domains. We claim that is a least energy sign-changing solution of (2.1) with positive and sign-changing.
Define
Similarly as Step in Theorem , we have
For any semi-nodal solution of (2.1) with sign-changing, by similar arguments as in Theorem , there exist satisfying
and so
then is a least energy sign-changing solution. We complete the proof.
Proof of Theorems 1.4 and 1.5
We consider the case when is a smooth bounded domain,
Since the embedding is compact, it is easy to see that after trivial modifications, all arguments in Sections 2–4 hold for system (5.1) by replacing with , respectively. Here we give a quiet different proof from those in Theorems , , and , but cannot be used in .
The proof of Theorem 1.4.
It is enough to check that
In fact, if (5.2) holds and so (5.1) has infinitely many sign-changing solutions satisfying as and by standard elliptic regularity theory. Observe that
then we have
Now, we prove that (5.2). Suppose, in view of a contradiction, that there exists , and such that
Let be the eigenfunctions of and be the corresponding eigenvalues with as . Define
by
we have , then by Definition , there exists such that . By Lemma 2.3, , so
Observe that from , we deduce that and so
Moreover,
we have that are uniformly bounded in . Then, up to a subsequence, we get
By , , there holds . But from (5.3), we get , then , a contradiction. Therefore, (5.2) holds. This completes the proof.
The proof of Theorem 1.5.
It suffices to prove that (5.1) has infinitely many semi-nodal solutions. This arguments is similar as above, we omit the details.
Footnotes
Acknowledgments
The article is supported by the National Science Foundation of China (11326098) and Training Plan for Young Innovative Talents of Heilongjiang Province [UNPYSCT-2018177].
Authors Contributions
This article is the result of the author who contributed equally to the final version of this article. The author read and approved the final article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Supported by NSFC12101162.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Availability of Data and Materials
Not applicable.
References
1.
AmbrosettiA.ColoradoE. (2007). Standing waves of some coupled nonlinear Schrödinger equations. Journal of the London Mathematical Society, 75, 67–82.
2.
BartschT.DancerN.WangZ.-Q. (2010). A Liouville theorem, a priori bounds, and bifurcating branches of positive solutions for a nonlinear elliptic system. Calculus of Variations and Partial Differential Equations, 37, 345–361.
3.
BartschT.LiuZ.WethT. (2004). Sign changing solutions of superlinear Schrödinger equations. Communications in Partial Differential Equations, 29, 25–42.
4.
BartschT.WangZ.-Q. (2006). Note on ground states of nonlinear Schrödinger systems. Journal of Partial Differential Equations, 19, 200–207.
5.
BartschT.WangZ.-Q.WeiJ. (2007). Bound states for a coupled Schrödinger system. Journal of Fixed Point Theory and Applications, 2, 353–367.
6.
ChangK. C.WangZ. Q.ZhangT. (2010). On a new index theory and non semi-trivial solutions for elliptic systems. Discrete and Continuous Dynamical Systems, 28, 809–826.
7.
ChenZ.LinC. S.ZouW. (2016). Infinitely many sign-changing and seminodal solutions for a nonlinear Schrödinger system. Annali della Scuola Normale Superiore di Pisa, Classe di Scienze, 15, 859–897.
8.
ChenZ.ZouW. (2012). An optimal constant for the existence of least energy solutions of a coupled Schrödinger system. Calculus of Variations and Partial Differential Equations, 48, 695–711.
9.
ContiM.MerizziL.TerraciniS. (1999). Remarks on variational methods and lower-upper solutions. Nonlinear Differential Equations and Applications, 6, 371–393.
10.
DancerN.WeiJ.WethT. (2010a). A priori bounds versus multiple existence of positive solutions for a nonlinear Schrödinger systems. Annales de l’Institut Henri Poincaré, 27, 953–969.
11.
DancerN.WeiJ.WethT. (2010b). A priori bounds versus multiple existence of positive solutions for a nonlinear Schrödinger systems. Annales de l’Institut Henri Poincaré, 27, 953–969.
12.
FrantzeskakisD. J. (2010). Dark solitons in atomic Bose-Einstein condesates: From theory to experiments. Journal of Physics A, 43, 213001.
13.
KivsharY. S.Luther-DaviesB. (1998). Dark optical solitons: Physics and applications. Physics Reports, 298, 81–197.
14.
LinT.WeiJ. (2005a). Ground state of coupled nonlinear Schrödinger equations in , . Communications in Mathematical Physics, 255, 629–653.
15.
LinT.WeiJ. (2005b). Spikes in two coupled nonlinear Schrödinger equations. Annales de l’Institut Henri Poincaré, 22, 403–439.
16.
LiuJ.LiuX.WangZ. Q. (2015). Multiple mixed states of nodal solutions for nonlinear Schrödinger systems. Calculus of Variations and Partial Differential Equations, 52, 565–586.
17.
LiuZ.WangZ.-Q. (2008). Multiple bound states of nonlinear Schrödinger systems. Communications in Mathematical Physics, 282, 721–731.
18.
LiuZ.WangZ.-Q. (2010). Ground states and bound states of a nonlinear Schrödinger system. Advanced Nonlinear Studies, 10, 175–193.
19.
MaiaL.MontefuscoE.PellacciB. (2006). Positive solutions for a weakly coupled nonlinear Schrödinger system. Journal of Differential Equations, 229, 743–767.
20.
MaiaL.MontefuscoE.PellacciB. (2008). Infinitely many nodal solutions for a weakly coupled nonlinear Schrödinger system. Communications in Contemporary Mathematics, 10, 651–669.
21.
MirandaC. (1940). Un’osservazione su un teorema id Brouwer. Bollettino dell’Unione Matematica Italiana, 3, 5–7.
22.
NorisB.RamosM. (2010). Existence and bounds of positive solutions for a nonlinear Schrödinger system. Proceedings of the American Mathematical Society, 138, 1681–1692.
23.
SatoY.WangZ. (2004). On the multiple existence of semi-positive solutions for a nonlinear Schrödinger system. Annales de l’Institut Henri Poincaré, 1–15.
24.
SirakovB. (2007). Least energy solitary waves for a system of nonlinear Schrödinger equations in . Communications in Mathematical Physics, 271, 199–221.
25.
TavaresH.TerraciniS. (2012). Sign-changing solutions of competition diffusion elliptic systems and optimal partition problems. Annales de l’Institut Henri Poincaré, 29, 279–300.
26.
TerraciniS.VerziniG. (2002). Solutions of prescribed number of zeroes to a class of superlinear ODEs systems. Nonlinear Differential Equations and Applications, 231–256.
27.
TerraciniS.VerziniG. (2009). Multipulse phases in -mixtures of Bose-Einstein condensates. Archive for Rational Mechanics and Analysis, 194, 717–741.
28.
WeiJ.WethT. (2008a). Radial solutions and phase separation in a system of two coupled Schrdinger equations. Archive for Rational Mechanics and Analysis, 190, 83–106.
29.
WeiJ.WethT. (2008b). Radial solutions and phase separation in a system of two coupled Schrödinger equations. Archive for Rational Mechanics and Analysis, 190, 83–106.