I establish conditions for existence of pure strategy equilibria in K-candidate Downsian electoral competition (K ≥ 2) with valence when the voting rule is monotonic, generalizing existing results to non-proper rules and possibly continuous electorates. The conditions are sufficient when K ≥ 2 and (essentially) necessary in the K = 2 candidate case. They compare the size of one candidate's valence advantage to the radius of a generalized median pivotal ball (P-ball). I flesh out the difference of this generalized median with a recent alternative which, in turn, I characterize both on the basis of a weaker median property and using pivotal hyperplanes.
Two-candidate electoral competition with Downsian candidates (Downs, 1957), majority rule, and an electorate with Euclidean preferences has an equilibrium in pure strategies if (and, essentially, only if) one candidate has a sufficiently large valence advantage (Ansolabehere and Snyder, 2000). While the voting rule is typically resolute in this setting,1 other voting rules may not be requiring additional election stages if the first electoral contest produces no winner. This is the case when a supermajority is required for one of the candidates to win, as is provided for the election of a Pope in the papal conclave. In such cases, additional election rounds are held until some candidate(s) drops from the race or some voters alter their vote. The papal conclave is the leading example in the recent study by Martin et al. (2022), who consider all proper voting rules and establish (among other results) a necessary and sufficient equilibrium existence condition in two-candidate elections with valence, generalizing the above cited existence condition of Ansolabehere and Snyder (2000). In that setting, as in the present study, the strategic form model of the election assigns payoffs intermediate to the payoffs from victory of one of the candidates if there is no such winner in the first round. These payoffs represent a reduced form downstream calculation about the eventual winner of the office in contest.
Besides supermajority requirements, another leading example of such initial election stages with irresolute voting rules are the sub-majority shortlisting, sponsorship, or parainage requirements for participation in a (possibly unnecessary) main election. For example, nomination for the election of party leadership in the UK’s Conservative party requires support from eight MPs. If there is only one valid nomination, then that person is elected. Similarly, the Greek social democratic party (KINA) requires support from party members or from 15% of the party’s central committee to contest the main election. A third example are the parainage requirements for candidacy in the elections for the presidency in the French 5th Republic, which require a number of signatures from elected officials. It is often the case in such procedures that the initial nominating or shortlisting electorate is different (and smaller) than the main electorate. These rules strike a balance between weeding out non-serious candidates while at the same time allowing serious competitors to be further screened through the costlier campaign for the main election. Especially for party leader elections, these shortlisting requirements can be substantial in order to avoid a costly electoral contest that may unnecessarily enhance the perception of internal party divisions. Many party leadership races unfold with an uncontested victory by an advantaged candidate who essentially wins the election in the first nominating stage. The results in this study can be thought of as a way to quantify the advantage of the leading candidate necessary/sufficient to produce a winner in this manner.
I extend the environment of Ansolabehere and Snyder (2000) and Martin et al. (2022) to all monotonic voting rules to accommodate non-proper sponsorship or nomination rules. Whereas these authors assume two candidates, I assume () Downsian candidates and a possibly infinite electorate. Candidates receive an intermediate payoff to that of outright victory or defeat if there is no clear winner, the latter case corresponding to the situation where none or more than one candidates receive the support of a winning coalition. I show that a pure strategy equilibrium exists if the valence advantage is strictly larger than the squared radius of a generalized median ball (a -ball for pivotal) introduced in Kalandrakis (2021, 2022).2 Furthermore, in the two candidate case an equilibrium does not exist when the inequality is reversed. In the case of equality, existence may obtain in the presence of an advantage if the electorate is represented by a continuum. These results subsume those by Ansolabehere and Snyder (2000) and Martin et al. (2022).
A -ball is pivotal as a minimum radius ball with the property that if every member (enfranchised or not) of the ball prefers some over some , then so do all members of a winning coalition and there does not exist a winning coalition all the members of which prefer over . I show that if the electorate is finite, then -balls are different, in general, from minimum radius balls that intersect with all blocking coalitions, a property that defines the -yolk used in the corresponding result of Martin et al. (2022). This difference is easy to illustrate in the one-dimensional example of Kalandrakis (2022), which I also use in section 3 for a more formal treatment:
Assume one dimension and a finite committee with five members and ideals located at , respectively. Assuming each member has equal voting weight and using a quota voting rule with a two-fifths quota, then the (unique) -ball is centered at and has radius Kalandrakis (2022). On the other hand, there is a continuum of -yolks with center and radius zero, where . Any such point intersect with the convex hull of all coalitions of size four, that is with all blocking coalitions.
To further explore these ideas in the general setting where the electorate may be infinite, I introduce a -ball (for quasi-pivotal) that is defined in terms of intersections with certain pivotal half-spaces and I characterize it as a smallest radius ball with a generalized median pivotality property that is weaker than that of a -ball, omitting the conjunctive last statement that characterizes the -ball. I show that for general voting rules and finite electorates a ball is a -ball if and only if it is a -yolk, thus providing two alternative characterizations of the latter that may be of both practical and of independent theoretical interest. Specifically, in the case only a finite number of voters have voting rights (so that both concepts are well defined), the -yolk is different from a -ball because it is possible that all members of the -yolk prefer over but there exists a winning coalition all the members of which prefer over . In Example 1 above, if , , and for the -yolk at , all members of the -yolk prefer over but a winning coalition of (strictly) prefer over .
There are candidates, , , and a -dimensional policy space , . I denote a generic candidate by and use for an opponent of . Simultaneously, each announces a policy platform . After platform profile is publicly observed, a set of voters (possibly a continuum) in cast a vote for one of the candidates. The assumption that the electorate may be a continuum is common in models of electoral competition. I index individual voters by their ideal policy and assume that the policy preferences of take the familiar negative quadratic form, that is, for all , .
To define winning coalitions allowing for general voting rules in this (possibly continuous) electorate, fix Borel probability measures on and thresholds , for all and an integer . A coalition is winning if
The default case is when there is one “at large” electorate () and is a winning quota, but the extra generality allows cases when subgroups of the electorate may have privileged input in the election outcome.3 As discussed in Kalandrakis (2021, 2022) this formulation subsumes finitely populated electorates (with being discrete measures) and (by the arguments of Taylor and Zwicker (1993)) all non-empty monotonic voting rules in that finite electorate case. In what follows, we say that the electorate is finite if is a finite set.
For each pair of candidates , define to be the (dis)advantage of over , and assume for all and that for some (the last assumption precluding the well-understood model without valence). This candidate pair-specific formulation is more general than the somewhat constraining interpretation of the valence advantage as universally effective against any opponent. A Democrat presidential candidate may be more or less advantaged when the Republican nominee is Donald Trump than that same candidate is when the Republican nominee is Mitt Romney. We can then define for any profile of platforms and every candidate the coalition of voters that strictly and weakly prefer :
Candidates’ objective is victory and ’s payoff takes the form
These payoff assumptions imply that voters randomize when indifferent, though the randomization need not be with equal probability or uniform across indifferent voters and their possible choices, as long as it is strict in the sense that each such choice receives positive probability mass. These assumptions on voter behavior are consistent with those in Ansolabehere and Snyder (2000) and Martin et al. (2022). Accordingly, the first two lines assign payoffs to candidate from outright victory (winning office with probability one) or defeat (winning office with probability zero), respectively. The third and fourth lines correspond to cases when one of the two certainty outcomes for (victory or outright defeat) may prevail with some probability. In all of the latter cases, ’s payoff is short of the payoff from victory with probability one, but has to be positive if no other candidate has a positive probability of winning the election (in the third line). These payoffs subsume cases such that one of the candidates wins the election with some positive probability less than one depending on the resolution of voters’ indifference, and/or cases when the election produces no immediate winner, but candidates may go on to win the office at stake in the election after additional action is taken. The winner in such cases may be determined on the day of the election by a coin-toss rule, or by some un-modeled ensuing sequence of new elections, possibly with a different electorate, with or without the participation of some candidates, and even with the possible consideration of additional candidates. We do not need to make more precise payoff assumptions in all these cases, but note that we allow so that it is possible that none of the candidates eventually wins the office or she does so at some additional cost. We also allow the possibility that , which might capture situations when candidate benefits from a good performance (preventing outright loss to her opponents) in the first inconclusive election, even if her opponents eventually win the office at stake in this election. Profile is an equilibrium if for all and all .
Some additional notation and definitions are used in the upcoming analysis. A hyperplane in is defined by direction , , and scalar . and denote the two closed-half-spaces defined by . For any , let be the closed ball of points within distance from , and denote the corresponding open ball by . Following Kalandrakis (2021, 2022), a hyperplane is pivotal if one of the half-spaces it defines is a minimum winning coalition:
Hyperplane is pivotal if where
With that definition in place, a -ball is a smallest radius ball that intersects all pivotal hyperplanes, that is, a ball such that the pair solve
Kalandrakis (2022) characterizes -balls as minimum radius balls with a generalized median property reviewed in section 3. of the present study (see Definition 2). Any ball that intersects all pivotal hyperplanes has that median property and among those centered at arbitrary , Kalandrakis (2022) defines a -centered -ball as one whose radius solves:
Denote the solution of (Py) by .
Main results
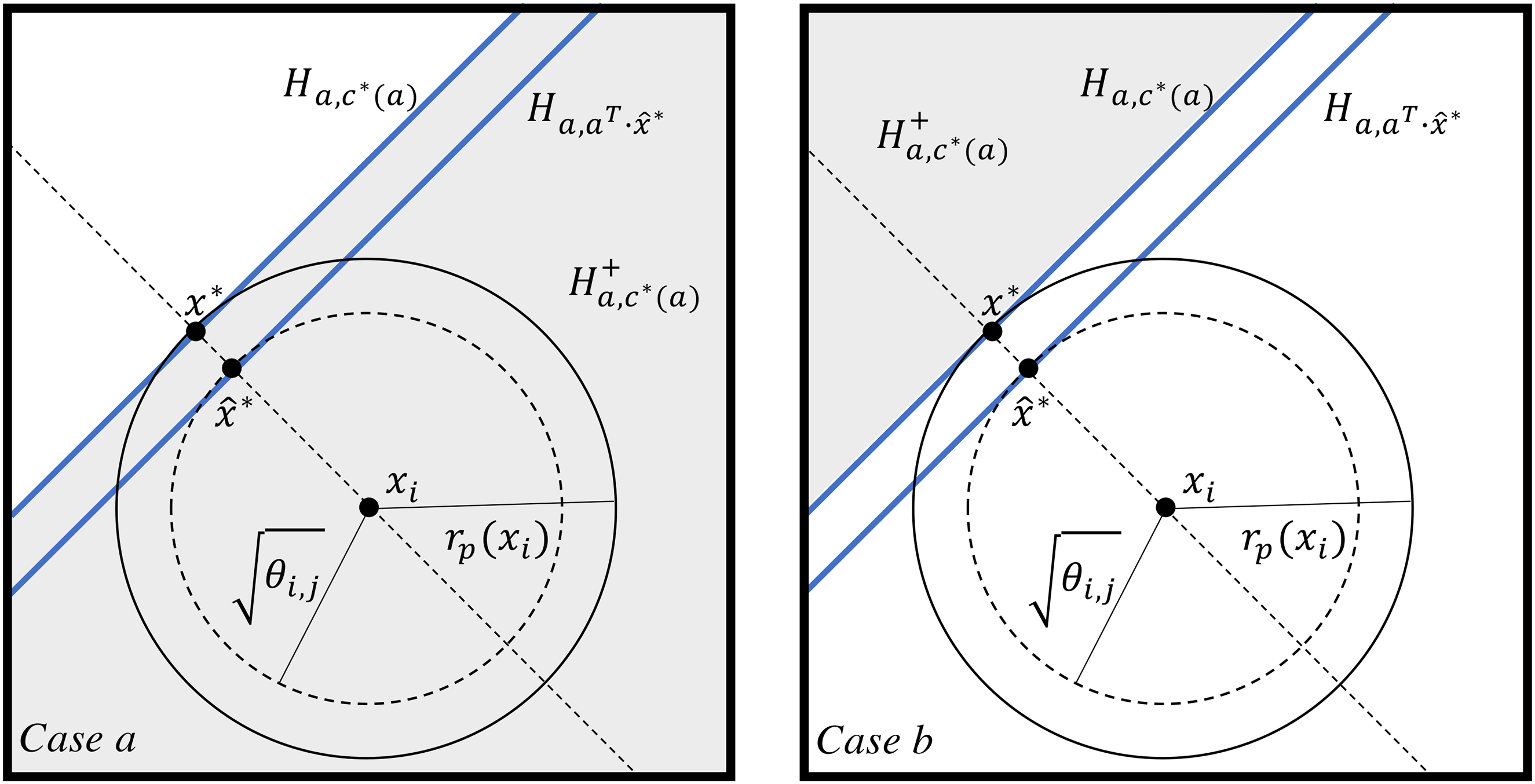
The bulk of this section is devoted to the two candidate case (), with a result for the case appearing at the end of this section. First, in Lemma 1 I show that a necessary condition for an equilibrium in which candidate locates at some is that the square of the radius of the -centered -ball is smaller than ’s valence advantage over the other candidate. Furthermore, the inequality is strict when the electorate is finite. The reader is directed to Figure 1 as a visual aid for the proof of that lemma.
Illustration of Lemma 1.
If and is an equilibrium, then for some . If, in addition, the electorate is finite then .
Consider an equilibrium . Since for some , it must be that . If not, has a profitable deviation to , as and . Now suppose that to get a contradiction. There exists (at least one) pivotal hyperplane that is binding in program , being tangent to the ball . Let be the point of tangency. Because , there exists a point on the line segment at distance from such that . Now consider a deviation by to and denote the resulting profile by . It follows that and are separated by the hyperplane . Now consider two cases:
a, : Then, is not winning (because is minimum winning).
b, : Then, is winning (because is winning).
In either of the above cases, , and has a profitable deviation. But this is a contradiction to being an equilibrium, so it must be that .
To conclude, it remains to show that is not an equilibrium if the electorate is finite and . In that case, using the above notation, we have and . Then, if (as in Case a), is not winning because for some ( is pivotal and the electorate is finite). If the analog of Case b applies, then is winning. In either case, is a profitable deviation for . □
The difference between the infinite and finite electorate cases in Lemma 1 arises because pivotal hyperplanes (say ) that bind in program (Py) may have zero voting measure (more precisely: for all ) in the former case, whereas they are guaranteed to have positive voting measure (for some ) in finite electorates. It follows that when , the point of tangency between such and the -centered -ball is a profitable deviation for against in the putative equilibrium when the electorate is finite (but may not be a profitable deviation in an infinite electorate). These cases are illustrated with Examples 1 and 2 following Theorem 1.
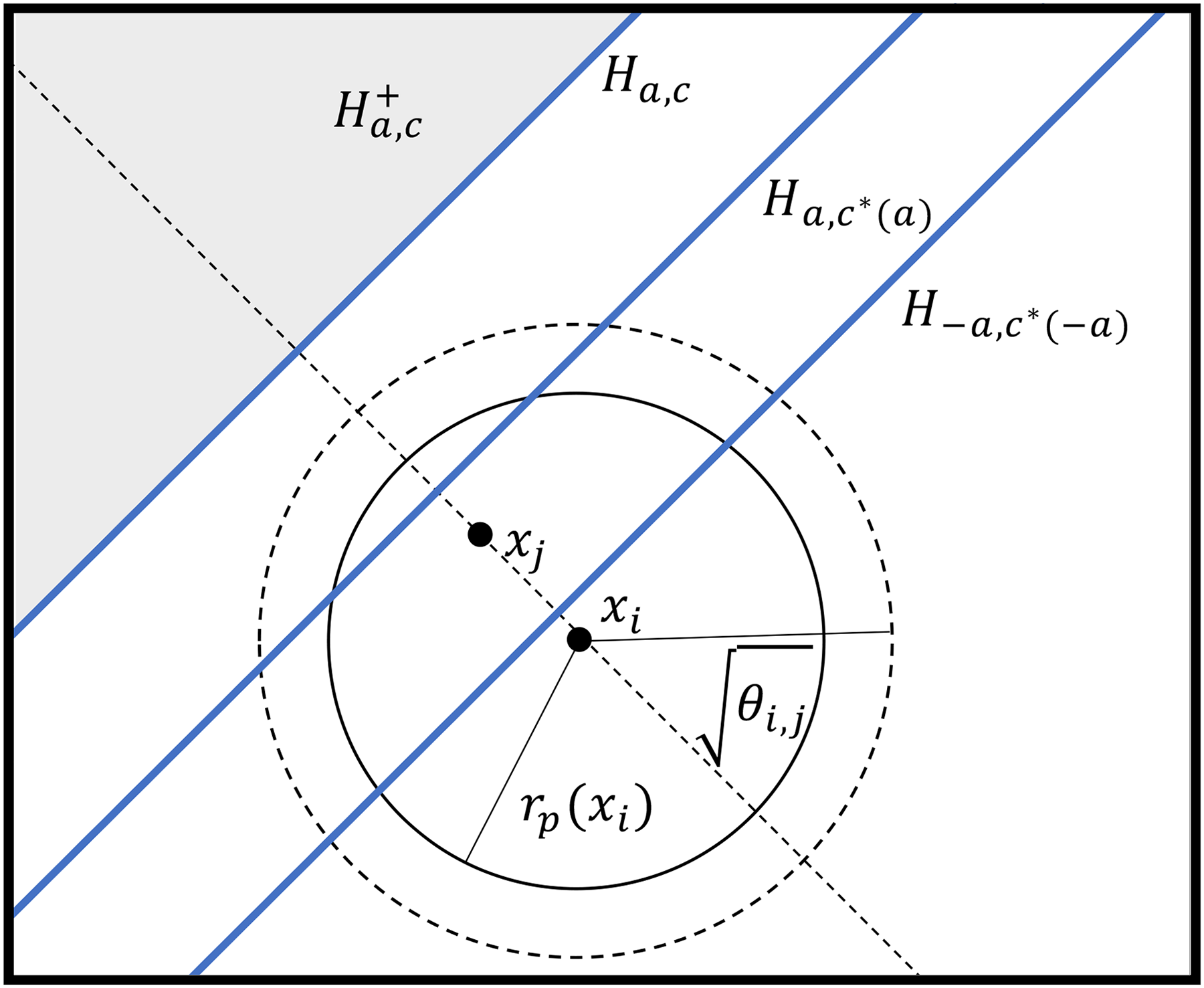
The next lemma shows a converse to Lemma 1: Any platform location for , , where the squared radius of the -centered -ball is strictly smaller than ’s advantage is part of an equilibrium profile when paired with any platform choice for candidate . Figure 2 illustrates the arguments proving Lemma 2.
Illustration of Lemma 2.
If and for some and , then any profile in which plays is an equilibrium.
Consider any such that . It suffices to show that for all with playing , is winning and is not, ensuring that neither player has a profitable deviation. If then this is obvious because . If , there is a hyperplane that separates and , and we can assume without loss of generality that . Now for all , . As a consequence, and . There exist two (possibly identical) pivotal hyperplanes and , both parallel to and both intersecting the -centered -ball . We then have and is not winning as is minimum winning. Furthermore, is winning and , so is winning, as we wished to show. This concludes the proof. □
Combining Lemmas 1 and 2, we conclude that if there are candidates and solve (P) so that is the -ball radius, then an equilibrium exists when for some (by Lemma 2 because when ) and does not exist when (by Lemma 1 because for all ). If the electorate is finite, then an equilibrium does not exist if , again by Lemma 1. These arguments prove:
If an equilibrium exists if and does not exist if . If the electorate is finite, an equilibrium exists if and only if .
Theorem 1 covers both finite and infinite electorates and all monotonic voting rules, including sub-majority quota rules, which occur often in the form of parrainage requirements for candidacy in a (possibly not necessary) subsequent election, as discussed in the introduction. If the electorate is finite the existence condition is necessary and sufficient, whereas in the infinite electorate case the Theorem essentially replicates the above condition up to the knife-edge case when the candidate valence advantage is equal to the square of the -ball radius. Therefore, Theorem 1 is more general than Proposition 2 of Ansolabehere and Snyder (2000) and Theorem 6 of Martin et al. (2022). Specifically, Ansolabehere and Snyder (2000) assume majority rule and compare the valence advantage to the radius of the yolk (Ferejohn et al., 1984; McKelvey, 1986). Martin et al. (2022) assume proper, monotonic voting rules and a finite electorate, and the existence condition compares the valence advantage with the radius of a generalization of the yolk they term the -yolk.4
The -yolk is a minimum radius ball that intersects the convex hull of all blocking coalitions. Specifically, if is finite, then a coalition is blocking if is not winning, that is, if there exists such that . As discussed in the introduction, the difference between a -ball and a -yolk can be illustrated in the one-dimensional example of Kalandrakis (2022), which I now revisit using formal notation:
(revisited)
Let , , and a finite committee with members located at , respectively, each with equal voting weights so that for all .
If then the (unique) -ball is . It coincides with the -yolk.
If then the (unique) -ball is . There is a continuum of -yolks , one for each .
Note that a -yolk and a -ball differ in Example 1.b, where the -yolk radius is zero and the -ball radius is equal to . It is easy to see in that case that with candidates, an equilibrium does not exist if for some . Specifically, candidate can force an inconclusive election with positive probability by locating at if , whence ; or, by locating at if , whence . In either case, . Thus, an equilibrium does not exist even though is larger than the -yolk radius of zero.
In the next example, the electorate is a continuum in two dimensions and an equilibrium exists in the knife-edge case , even when the voting rule is proper (whereas it cannot exist if the electorate is finite).
Let , , is a bivariate standard normal distribution, and . Then the (unique) -ball is , where is the cumulative of the univariate standard normal distribution.
I omit reference to the -yolk in Example 2 since it is only defined for finite electorates (though I discuss a practical approach in the next section). It is easy to see that in this case an equilibrium exists when with and any . Specifically, a hyperplane (say ) separating5 coalitions and cannot intersect the interior of the -ball, , because for all and for that reason and . As already discussed following Lemma 1, the key difference in this example with the finite electorate case is that .
I conclude this section by showing that a generalization of the necessary and sufficient condition of Theorem 1 is essentially sufficient in the case:
If , then an equilibrium exists if there exists such that for all .
To show the result, consider a profile such that for all , where is a -ball center. Then and for all . Clearly has no profitable deviation. Let be a profile that differs from by a unilateral deviation by some . It is still the case that for all , and then the arguments of Lemma 2 ensure that such a deviation is not profitable for , completing the proof. Note that unlike the two candidate case, an equilibrium may exist if the condition is not met and . Furthermore, although the advantaged candidate wins in the constructed equilibrium profile proving the theorem, Theorem 2 does not preclude an equilibrium with not being the outright winner even if the sufficiency condition of the theorem holds.
Generalized median properties and blocking
In view of the above analysis, the -ball radius emerges as a measure of the size of the valence advantage sufficient (and essentially necessary in the two candidate case) for the existence of equilibrium. What is the connection of this generalized median with the -yolk and its radius as used in the existence theorem of Martin et al. (2022)? I explore this question in this section. First, define the strict and weak social preference relations and , comparing alternatives :6
A -ball is a smallest radius ball that is pivotal (Kalandrakis (2022), Corollary 1, page 307), that is, it satisfies the following generalized median property:
A ball is pivotal if for all ,
If for all , then and .
If for all , then and .
We could also consider a weaker form of this pivotality property that removes the last clause in the above conjunction, specifically:
A ball is quasi-pivotal if for all ,
If for all , then .
If for all , then .
Obviously, every pivotal ball is quasi-pivotal, but there may exist quasi-pivotal balls that are not pivotal. To drive this point further, I will now provide a characterization of quasi-pivotal balls in terms of pivotal hyperplanes. Specifically, if is a pivotal hyperplane as in Definition 1 then say that is a pivotal blocking half-space.7 With that terminology in place, we can show the following:
is quasi-pivotal if and only if it intersects with all pivotal blocking half-spaces.
For necessity, suppose is quasi-pivotal but there exists pivotal hyperplane such that . Let be the point in closest to (at distance from ) and let be the projection of on (so , and are colinear). Now where because . We also have and it follows that because is quasi-pivotal. But this also implies that is a winning half-space which contradicts being pivotal.
For sufficiency, assume intersects with all pivotal blocking half-spaces. We need to show it is quasi-pivotal, that is for all :
If for all , then .
If for all , then .
If , then and are trivially true. So assume and let and, without loss of generality, . There exists pivotal hyperplane . Because and intersect in at most one point in cases i. and ii. (none in case ii.) and , we have . Therefore, and in case ii. . Thus, and follow in each case because is winning. □
The proof of Theorem 3 follows arguments analogous to those in the proof of Theorem 1, part 2 in Kalandrakis (2022). In view of Theorem 3, it is natural to define a smallest radius ball that intersects all pivotal blocking half-spaces, that is, a ball such that solve
I call this generalized median a -ball (for quasi-pivotal). Note that mathematical program (Q) is a relaxation of program (P), so that a -ball has a weakly smaller radius than a -ball, that is, it must be that . By Theorem 3, a -ball, , is now characterized as a smallest-radius quasi-pivotal ball, a fact I state in the following corollary:
is a minimum radius quasi-pivotal ball if and only if it is a -ball.
It remains to establish a connection between -balls and the -yolk of Martin et al. (2022). One difficulty with this comparison in the more general setting we study presently is that the notion of a blocking coalition is not obvious with a continuous electorate.8 But once we limit attention to finite electorates as assumed in Martin et al. (2022), the connection becomes immediate:
If the electorate is finite, then is quasi-pivotal if and only if it intersects with the convex hull of all blocking coalitions.
Suppose is quasi-pivotal. To show it is necessary for it to intersect the convex hull of all blocking coalitions, suppose there exists blocking coalition and to get a contradiction. Let be the projection of on and let be on the line segment at distance from . Then for all , therefore because is quasi-pivotal. But it is also the case that for all which implies since is a blocking coalition, a contradiction.
To show sufficiency, assume intersects with the convex hull of all blocking coalitions. We will show it is quasi-pivotal, that is, that for all
If for all then .
If for all then .
The above is trivially true if , so assume . Let be the hyperplane of indifferent voters perpendicular to and crossing through . Assume without loss of generality that . Suppose for all but . Then for some . But then is a blocking coalition and (because ), a contradiction. If , then for some , therefore is blocking. But then and again , again a contradiction. □
We have thus established:
If the electorate is finite, then is a -yolk if and only if it is a -ball.
Note that here blocking coalitions and a -yolk are defined as in Martin et al. (2022) but for all monotonic voting rules, not just the subset of proper voting rules. The -ball is defined for both finite and infinite electorates. In finite electorates, the definition of the -ball using pivotal half-spaces allows its efficient computation involving a finite number of determining hyperplanes analogous to those defined by Tovey (1992), and using the arguments in Kalandrakis (2022), Appendix B. For fixed policy dimension , this approach is generally more efficient than a naive enumeration of all blocking coalitions, because the number of the latter does not generally scale well with the number of voters.9
In view of Corollary 2 and Example 1, we also conclude that there are -balls (and therefore -yolks in finite electorates) that are not -balls with the former having strictly smaller radius . This occurs for voting rules that are not proper.
Finally, observe that the results in this section are valid for more general preference representations allowing disutility to be any monotonic function of the Euclidean distance from the individual ideal point, as assumed in Kalandrakis (2022). The restriction to quadratic preferences is necessary for the results of section 3 and those in Kalandrakis (2021) because it ensures that the set of voters that are indifferent between two platforms with valence or between two lotteries, respectively, have ideal points on a hyperplane, instead of a more general set.
Conclusion
I have generalized a condition characterizing existence of equilibrium in a model of electoral competition with valence. The results compare the size of the valence advantage of the leading candidate to the radius of the pivotal -ball introduced by Kalandrakis (2021, 2022), which is related but different than the -yolk of Martin et al. (2022). The quasi-pivotal -ball proposed in the more general environment of this study coincides with the -yolk when the latter is defined and allows both a practical approach to its computation and a theoretical interpretation as a generalized median.
When it comes to non-proper voting rules, the existence results allow application to nomination sponsorship procedures to contest a possibly unnecessary main election. They provide a gauge of the size of the advantage necessary/sufficient for a privileged candidate to win the office without contest, a phenomenon that occurs frequently within political parties when established party leaders are (re-)elected without any challenger.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Tasos Kalandrakis
Notes
References
1.
AnsolabehereSSnyderJM (2000) Valence politics and equilibrium in spatial election models. Public Choice103: 327–336.
2.
AragonesEPalfreyTR (2002) Mixed equilibrium in a Downsian model with a favored candidate. Journal of Economic Theory103(1): 131–161.
3.
AragonesEXefterisD (2012) Candidate quality in a Downsian model with a continuous policy space. Games and Economic Behavior75(2): 464–480.
4.
AshworthSde MesquitaEB (2009) Elections with platform and valence competition. Games and Economic Behavior67: 191–216.
5.
BernhardtMDIngbermanDE (1985) Candidate reputations and the ‘incumbency effect’. Journal of Public Economics27(1): 47–67.
6.
BuisseretPVanWeeldenR (2022) Polarization, valence, and policy competition. American Economic Review: Insights4(3): 341–352.
7.
CarterJPattyJW (2015) Valence and campaigns. American Journal of Political Science59(4): 825–840.
8.
DenterP (2021) Valence, complementarities, and political polarization. Games and Economic Behavior128: 39–57.
9.
DownsA (1957) An Economic Theory of Democracy. New york: Harper Colins.
10.
FerejohnJAMcKelveyRDPackelEW (1984) Limiting distributions for continuous state Markov voting models. Social Choice and Welfare1: 45–67.
11.
GrofmanBTroumpounisOXefterisD (2019) Electoral competition with primaries and quality asymmetries. The Journal of Politics81(1): 260–273.
12.
GrosecloseT (2001) A model of candidate location when one candidate has a valence advantage. American Journal of Political Science45(4): 862–886.
13.
HerreraHLevineDKMartinelliC (2008) Policy platforms, campaign spending and voter participation. Journal of Public Economics92(3-4): 501–513.
14.
HummelP (2010) On the nature of equilibria in a Downsian model with candidate valence. Games and Economic Behavior70(2): 425–445.
15.
KalandrakisT (2021) A priori bounds on legislative bargaining agreements. American Journal of Political Science. DOI: 10.1111/ajps.12679.
16.
KalandrakisT (2022) Generalized medians and a political center. Social Choice and Welfare58: 301–319.
17.
KnudsonM (2020) Two candidate competition on differentiated policy sets. Games and Economic Behavior121: 413–434.
18.
KoehlerDH (1990) The size of the yolk: Computations for odd and even-numbered committees. Social Choice and Welfare7(3): 231–245.
19.
KrasaSPolbornM (2012) Political competition between differentiated candidates. Games and Economic Behavior76: 249–271.
20.
MartinMNganmeniZPigginsA, et al. (2022) Pure-strategy Nash equilibrium in the spatial model with valence: Existence and characterization. Public Choice190(3): 301–316.
21.
McKelveyRD (1986) Covering, dominance, and institution-free properties of social choice. American Journal of Political Science30(2): 283–314.
22.
MoulinH (1980) On strategy-proofness and single peakedness. Public Choice35(4): 437–455.
23.
ShapovalAWeberSZakharovA (2019) Valence influence in electoral competition with rank objectives. International Journal of Game Theory48: 713–753.
24.
TaylorAZwickerW (1993) Weighted voting, multicameral representation, and power. Games and Economic Behavior5: 170–181.
25.
ToveyCraig A (1992) A polynomial-time algorithm for computing the yolk in fixed dimension. Mathematical Programming57: 259–277.
26.
XefterisD (2014) Mixed equilibriums in a three-candidate spatial model with candidate valence. Public Choice158: 101–120.
27.
XefterisD (2018) Candidate valence in a spatial model with entry. Public Choice176(3-4): 341–359.
28.
ZakharovAV (2009) A model of candidate location with endogenous valence. Public Choice138: 347–366.