
Abstract

Tool integration is important to how people perceive their bodies in relation to the objects (“tools”) that they use to manipulate the world around them. Better understanding the nature of this integration has the potential for clinical benefits. For example, better understanding how people integrate representations into the body schema may allow for the development of more effective prosthetics for missing limbs. Several results have been interpreted as supporting the existence of tool integration (see Maravita & Iriki, 2004, for an early review). In Carlson, Alvarez, Wu, and Verstraten (2010), a previous study using positive afterimages, evidence was presented from which three conclusions were drawn: first, that tool integration for simple, grasped objects was rapid; second, that this assimilation occurred without any prior training; and third, that the same assimilation did not seem to occur for objects that subjects grasped and then released using a tool. This last result was interpreted as suggesting a limitation on integration—as working only for first-order, not second-order, extensions—at least for the condition tested.
Current Research and the Dynamic-Touch Hypothesis
In their commentary, Bruggeman et al. (2013; this issue) pointed out an issue with the tool condition in our study and the last of these conclusions. As the authors noted, the gripper tools were attached to a table; thus, subjects were not receiving appreciable proprioceptive feedback from the tool, or grasped object. Bruggeman et al. addressed this issue by having subjects hold a ball with a gripper tool that was not attached to a surface. Subjects reported an afterimage-fading effect for this second-order-extension condition, but reported no such effect when the tool was attached to a surface, as one might predict, given the contribution of proprioception to the body schema. Thus, second-order extensions do appear to be possible. This, we believe, is an important result, which should be followed with further work on the nature of second-order extensions of the body schema.
Bruggeman et al. claimed that this result conflicts with our claim that tool integration is mediated by touch, suggesting that their results instead support the role of dynamic touch in tool integration. There are two issues we would like to raise with how Bruggeman et al. have interpreted their results in relation to our own. First, Bruggeman et al. wrote that Carlson et al. “demonstrated that objects manipulated with the hand can become one with the body, but objects manipulated with a tool cannot” (p. 1063). This is not how we would describe the main conclusions of Carlson et al. (2010). To be clear, by tool, we mean any grasped or manipulated object. Thus, the grasped object in Conditions 1, 2, and 3 of the experiment qualified as a “tool” as much as the grabber tool did. Furthermore, the emphasis was less on the role of touch and more on proprioception. In Condition 4, subjects were unable to rely on either haptic or proprioceptive feedback to form a nonvisual representation of the object grasped with the tool. Bruggeman et al. effectively illustrated that once proprioceptive feedback is included, a representation of the second-order object is integrated. This is quite consistent with our overall emphasis on the role of proprioception in tool integration.
Second, Bruggeman et al. have not simply implicated proprioception but, rather, claimed that their results provide evidence that dynamic touch is a mechanism for tool integration. In particular, they claimed that dynamic-touch theory predicts rapid and equal fading for the afterimage of an object both when it is directly grasped with the hand and when it is held with the grabber tool. Bruggeman et al. defined dynamic touch as “perception based on information from effort-related muscle and tendon deformations” (p. 1063). However, dynamic touch is more specific (Turvey, 1996). Dynamic touch is a subsystem of haptic perception that allows subjects to report properties of objects (that are entirely invisible to the subjects) merely by wielding them. In the paradigm originated by Solomon and Turvey (1988), subjects wield an occluded object (typically a rod) that they have never seen and on the basis of this wielding alone are asked to report on some property of the object, such as its length. Given this description of dynamic touch and the accompanying paradigm, we interpret the claim that dynamic touch plays a role in tool integration as follows: The brain’s estimates of the physical parameters of grasped and wielded objects are used by the brain in integrating a structural representation of the objects into the body schema.
Although we believe that Bruggeman et al.’s results are consistent with this claim, we have two concerns about how the researchers connected their results to dynamic touch. First, an afterimage experiment supporting such a claim would require active wielding by subjects, and second, it would need to show that the physical parameters that seem to be tracked during dynamic touch (e.g., the moment of inertia, a measure of an object’s resistance to being turned) in fact affect assimilation. Bruggeman et al.’s conditions did not vary the physical parameters identified in the dynamic-touch literature. Moreover, although the researchers emphasized that their gripper tool was maneuverable, in contrast to the gripper tool used in Condition 4 of Carlson et al. (2010), Bruggeman et al.’s experiment did not involve any active wielding—nor, for that matter, did any of the conditions in the Carlson et al. study.
Directly Testing the Dynamic-Touch Hypothesis
Bruggeman et al.’s claim about dynamic touch and tool integration is nevertheless intriguing. The results of an afterimage experiment recently run in our lab more directly address this claim. Following methods described in our earlier work (Ritchie & Carlson, 2010), we had 20 subjects judge the vividness of afterimages of grasped L-shaped tools after making designated movements with their target hand. After adaptation to the dark, participants were instructed to arrange their arms in an initial position (see Fig. 1). A bright flash was then discharged. Subjects were instructed to move their target hand and tool into a final position once the positive afterimage became most vivid. In the control condition, subjects displaced their target hand to the side of their body, a procedure similar to that used in the screening trials described in Carlson et al. (2010). We used this condition to replicate the finding that displacing one’s limb while experiencing a positive afterimage results in a fading of the limb’s afterimage.
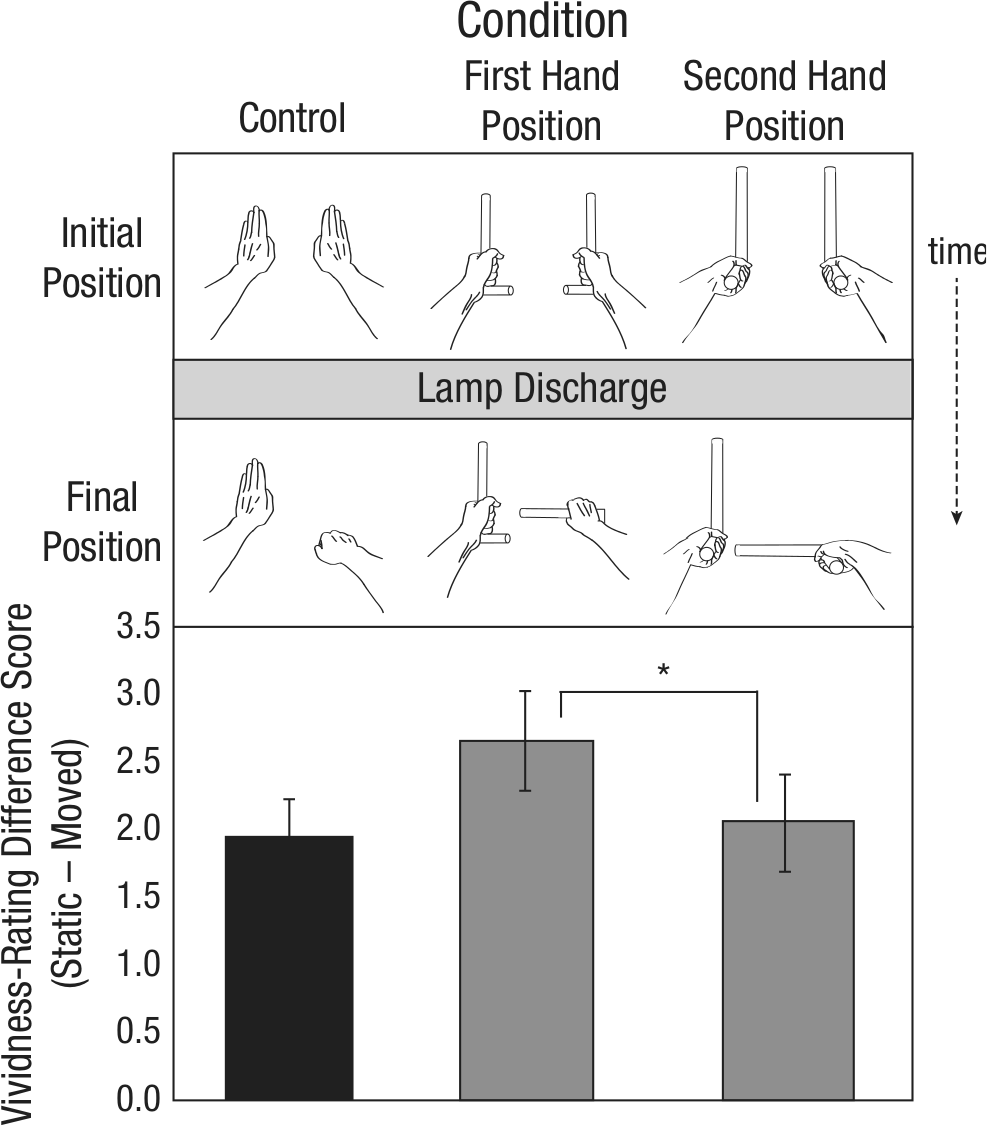
Illustration of hand positions in each condition and results. Subjects were required to rate the vividness of afterimages of a grasped tool after making designated movements with their target hand. After adaptation to the dark, subjects arranged their arms in an initial position, after which a bright flash was discharged. Subjects were instructed to move the target hand and tool to the final position once the positive afterimage had become most vivid. In the control condition, subjects displaced their hand to the side of their body. For each condition, subjects rated the vividness of afterimages for the tool and for their target arm, using scales from 0 to 10, with higher scores indicating greater vividness. Difference scores were calculated by subtracting the score for the moved hand from that for the static hand, such that greater difference scores indicated more fading of the afterimage. The asterisk indicates a significant difference between difference scores for the first-hand-position and second-hand-position conditions (p < .05). Error bars denote standard errors of the population mean for each condition.
In addition to the control condition, we examined two conditions in which subjects were required to rotate the tool 90°, from a vertical position to a horizontal position, while grasping either the base of the tool’s long extension (first-hand-position condition) or the short extension (second-hand-position condition; see Fig. 1). A critical finding in the dynamic-touch literature is that subjective judgments of objects’ properties, such as length, track certain invariant properties, such as the moment of inertia. For example, a subject’s estimate of this property can be influenced by where he or she grips the tool (Solomon & Turvey, 1988). We reasoned that by having subjects grip the tool before the joint and after the joint, we might observe a difference in the effect due to a difference in the estimated moment of inertia.
In all conditions, subjects’ nontarget hand remained stationary. For each condition, subjects rated the vividness of afterimages for the tool and for their target arm, using scales from 0 to 10. Difference scores were calculated by subtracting the vividness score for the target hand from that for the static hand, such that greater difference scores indicated more fading of the afterimage.
Unlike the conditions of Carlson et al. (2010) and Bruggeman et al. (2013), our two experimental conditions required subjects to make judgments about the fading of tool afterimages while the tools were displaced because of rotation and their own limb remained in a stable position. By having subjects simply rotate their wrist so that the tool, but not the limb, was displaced, proprioceptive feedback was primarily localized to the wrist. This accords well with the finding that the perceived length of a grasped object is a function of the inertia tensor at the wrist (Pagano, Fitzpatrick, & Turvey, 1993). 1 It also served to rule out the possibility that integration depends on limb displacement.
We indeed found that when subjects gripped the tool from the short extension (Condition 3), a smaller effect was observed, t(19) = 1.92, p < .05. Seemingly, this was because when subjects gripped the long extension, the rotation of the wrist and of the tool were more congruent than they were in the second hand position. Critically, this shows that how people grasp and wield objects influences tool integration. Although we fully acknowledge that considerably more research will need to be done to show that tool integration in general (and afterimage fading in particular) tracks the physical parameters identified in the dynamic-touch literature, this simple test shows that people’s sense of an object’s physical parameters (manipulated by changing the grip position) influences how the brain integrates the tool, in accordance with the work in the dynamic-touch literature.
In conclusion, we welcome Bruggeman et al.’s results as an important extension (please excuse the pun) of the results of Carlson et al. (2010) and, more broadly, of the work on tool integration. Although we believe that Bruggeman et al’s. study falls short in providing strong support for their claim that the brain uses information from dynamic touch for tool integration, the claim suggests important empirical predictions for future work. We empirically tested one critical assumption of this claim—specifically, that information obtained through dynamic touch influences tool integration—and found positive evidence for this connection. Still, more work (both experimental and theoretical) remains to be done to fully delineate the proposed connection between dynamic touch and tool integration—work that we believe will be important both for understanding the nature of the body schema and for future practical and clinical applications (e.g., the development of prosthetics).
Footnotes
Acknowledgements
We thank Ryota Kanai for his contributions to an earlier version of this experiment.
Declaration of Conflicting Interests
The authors declared that they had no conflicts of interest with respect to their authorship or the publication of this article.