
Abstract
This article focus on the dynamic behavior of straddle-type monorail composed of multiple vehicles. The four-vehicle dynamic model of straddle-type monorail considering the coupler force is established on the basis of the coupler dynamic model. The correctness of the model is verified by the real experimental vehicle test of Chongqing straddle monorail line 3 from Huixing station to Changfuroad station. The stable wheel overturning coefficient suitable for monorail is proposed which is used to evaluate the anti-overturning performance of straddle monorail. The vibration response, riding comfort, and dynamic curving behavior are analyzed using the dynamic model. The results show that the vibration response of car body accelerations obtained by single-car model is much different from that obtained by train model. The riding comfort of straddle-type calculated by the single-car model would make large mistake, and a multiple train model is needed. The dynamic curving behavior of straddle-type monorail obtained by the single-car model could represent the dynamic curving behavior well.
Keywords
Introduction
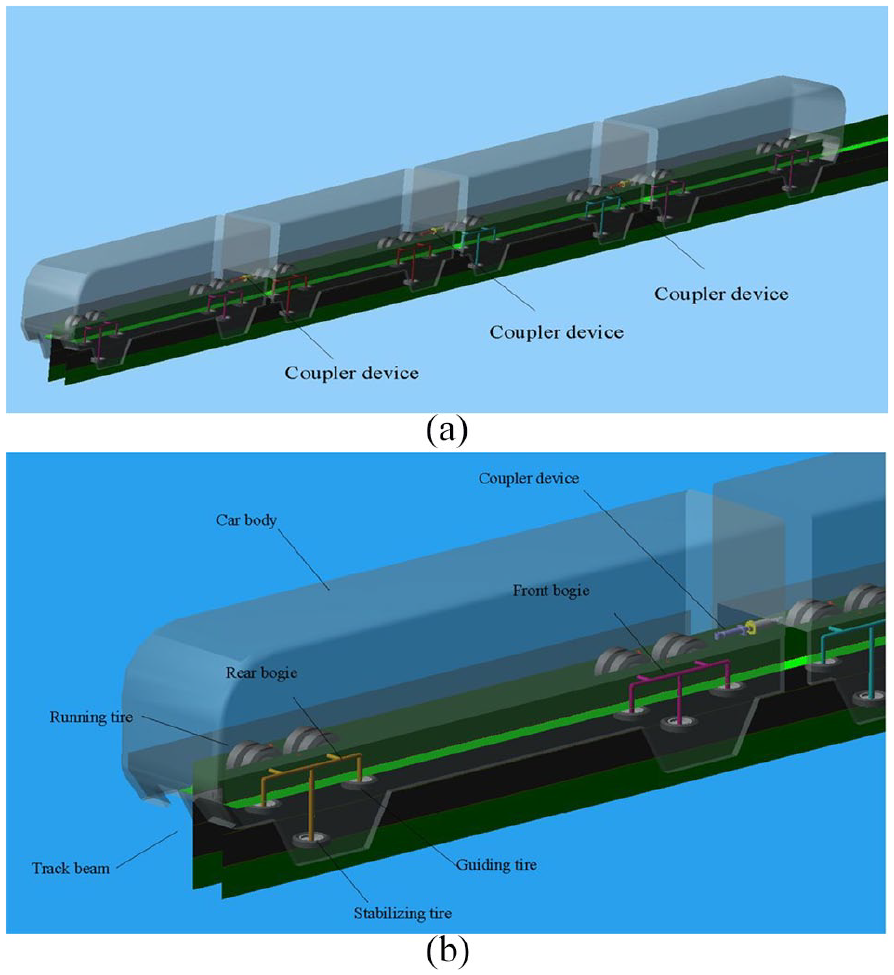
Straddle-type monorail, using rubber wheels and pre-stressed concrete track beams, is a kind of distinctive urban rail transit system, featured with strong climbing capability, small turning radius, less land occupation, low noise, and low cost.1,2 The structure of straddle monorail bogie is seen in Figure 1. Those unique technical characteristics have played an important role in urban rail transit lines.

The bogie of monorail.
The traditional straddle-type monorail dynamics mainly aims at the dynamic behavior of a single-car vehicle. However, there were almost no records about the research of dynamic behavior of train system. There is a big difference between the single-car model and the actual train. The single-car model cannot reflect the three-dimensional (3D) coupled vibration behavior of the train system caused by the vibration of the car body during the monorail operation. The dynamic behavior of straddle-type monorail train system directly related to the running quality of train and the safety of train operation. The key dynamic behavior indexes of straddle-type monorail include operation stability, dynamic curving behavior, riding comfort, and so on. Any shortage of the above dynamic performance will affect the safety of straddle-type monorail. Therefore, the modeling of train and analysis of dynamic behavior of straddle-type monorail train are important to the safety and ride quality of monorail.
Most of the studies on the dynamic behavior of straddle-type monorail focus on the dynamic performance of single car. Yildiz and Sivrioglu 3 are using a set of magnetorheological (MR) dampers both in the lateral and vertical directions, elimination of a monorail vehicle under a lateral wind load or a vertical disturbance. Ren et al. 4 researched the curve negotiation of the straddle-type monorail and the response characteristics of the track girder on the joint based on the dynamical equation of single-car model of straddle type monorail. Wang et al. 5 programmed the calculation procedure for the solution of the governing motion equations of the single-car model straddle-type monorail bridge-vehicle coupling system. The effects of speed; three kinds of loads and different radius of curvature on dynamic responses of the monorail bridge-vehicle coupling system are analyzed. Du et al. 6 analyzed the effects of suspension stiffness parameters of monorail vehicles on steering performance, derailment stability and overturning stability based on the single-car dynamic model in ADAMS.
Du et al.7–9 established the finite-element model of tire and rail of monorail model to study the tire parameter influence trends for the tire wear of running tires and the distribution law of the friction power density and friction power density uneven within contact area on the basis of the single-car monorail vehicle kinetic model. Yang et al.10,11 established coupling dynamic model of pantograph-catenary system on the basis of a monorail single-car dynamic model in ADAMS and researched the influence of pantograph head parameters on the power collection quality.
When studying the coupling relationship between straddle-type monorail train and track beam, some scholars simplify the train as a multi-mass block system as a combination of a number of rigid bodies connected by a series of springs and dampers dynamic analysis on the coupled monorail train, track beam, and rigid-frame bridge system in the time domain.12–15 Naeimi et al. 16 built a 3D model of the straddle-type monorail train system in ADAMS. The entire model, consisting of the vehicle and bridge subsystems, is numerically analyzed by performing dynamic simulation in time domain, and researched the dynamic interactions of the coupled system in the vertical and longitudinal direction.
Vehicle system dynamic model
Coupler device model
The function of engine coupler system is to make the two car bodies maintain a certain distance during the monorail operations. The semi-permanent bar coupler is installed between two car bodies. Its main components include central axis, buffer system, traction rod, attachment bolts, rotary mechanism, and attachment ring (Figure 2). 17 In order to ensure the train passes through the curve smoothly, the rotary mechanism at both ends of the coupler is equipped with rubber joints, which is used to ensure the horizontal and vertical angles between coupler and car body meets the requirements when the monorail passes through the curve.

Composition of coupler device.
In order to establish the coupler dynamic model, it is assumed that the coupler can only be deformed axially and that the horizontal and vertical angles of the coupler are within the design range. Thus, the coupler buffer device is simplified to a spatial two-force bar which can only deform along the axis. The force acting on the coupler and the longitudinal, transverse and vertical forces acting on the end of the car body can be calculated by the coordinate value of the joint point between the car and the coupler at any time.
The magnitude of coupler force is determined by the dynamic characteristic curve of coupler system. Because the nonlinear dynamic characteristics of buffer system are difficult to measure, so the nonlinear characteristics of coupler device are simulated by bilinear model (Figure 3). The semi-permanent bar coupler is a close-connected coupler, but the coupler clearance still exists. Therefore, the coupler force can be expressed as follow, which is considered coupler clearance
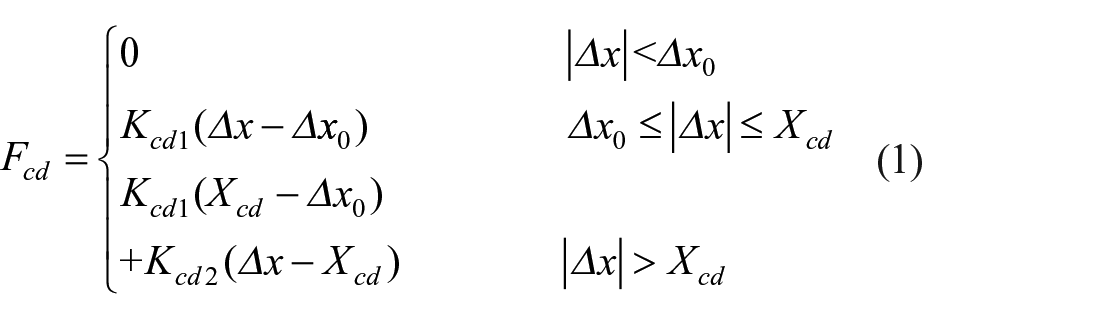
where

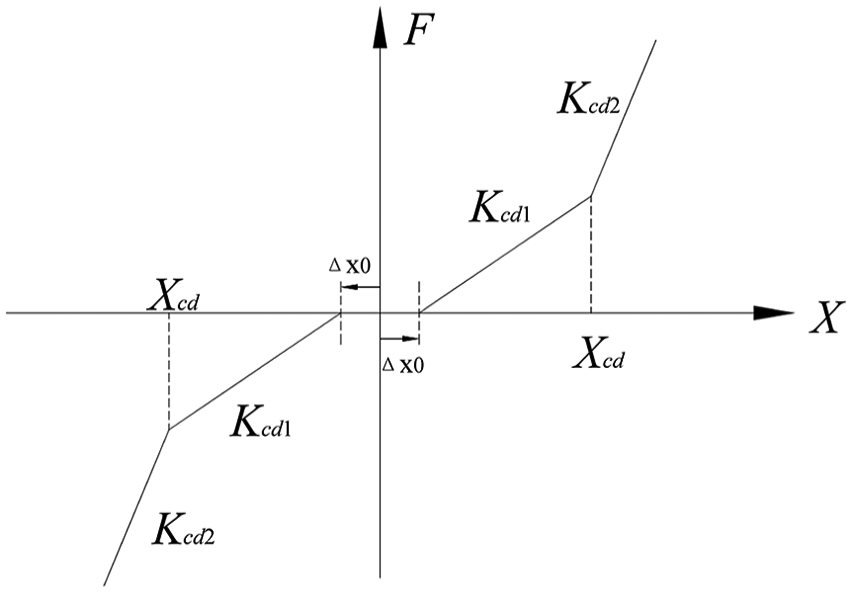
Model of coupler device.
The rectangular coordinate system XOY is established in the curve plane shown in Figure 4, so the coordinate values of the points on the center line of track are known. If the geometric center of the front bogie of n car is on the center line of track, and its coordinate value is
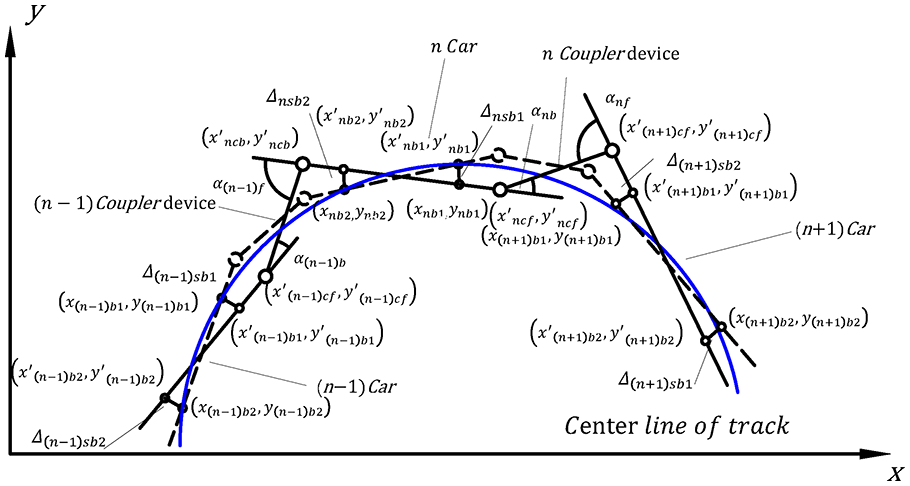
Geometric relation between coupler and front and rear car body on curve track.
Before the car offset, the body inclination angles of the n and n – 1 car is as follows


After the car body offset, the body inclination angles of the n and n – 1 cars are as follows


The center coordinate values of the bogies after car offset can be obtained by the following formula.
Front bogie center coordinate value of n car:

Rear bogie center coordinate value of n car:

Front bogie center coordinate value of n-1 car:

Rear bogie center coordinate value of n – 1 car:

The angle of coupler center line relative to x-axis after car offset is as follow

The coordinate values of the coupler articulation points at the end of the front and rear car body after car body offset can be obtained by the following formula:


According to the geometric relationship between the center line of coupler and the center line of car body, the transverse angles between the center line of coupler and the center line of front and rear car body can be obtained as follows


The longitudinal and transverse of coupler force can be deduced by the lateral angle of the coupler


Similarly, the coupler force of n and n + 1 car can be deduced


Track beam model
The track beam of monorail is made of pre-stressed concrete, so the ISO 8608 18 vehicle road standard model is adopted for the track beam roughness model of straddle monorail (Table 1). The track beam surface power spectral density (PSD) is as follows
Parameter value of track irregularity.
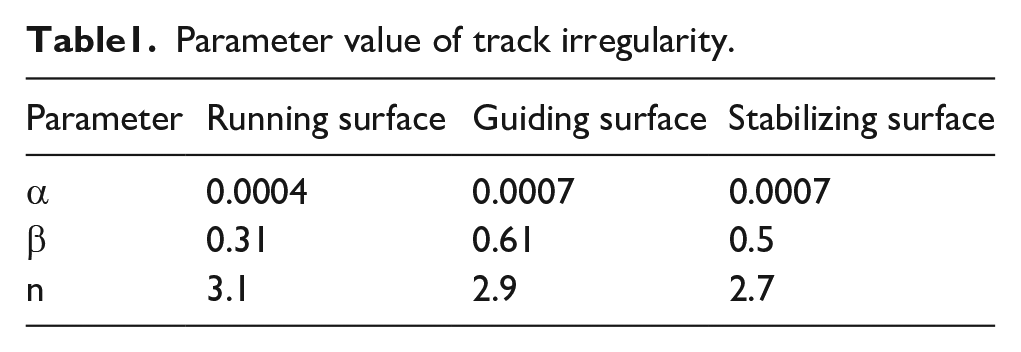

where:Ω is the spatial frequency (Times/m), α is road surface roughness, β is shape coefficient, n is PSD index coefficient. α, β, and n are obtained by power spectrum fitting.
Multi-rigid-body dynamic model of straddle monorail vehicle
According to the vehicle dynamics theory, the single-car dynamic model of monorail generally considers three spatial rigid body components which are car body and two bogies and 20 rubber tires which are eight running wheels, eight guiding wheels, and four stabilizing wheels, and ignore the structural elastic deformation of rigid body. Each rigid body considers 6 degrees of freedom (DOF), and each tire considers a degree of rotational freedom. Therefore, the single car is simplified to a multi-body system of 38-DOF. The monorail dynamic model consideration of the tire-track coupling is shown in Figure 5.

Multi-rigid-body dynamic model of straddle monorail vehicle: (a) main view, (b) top view, and (c) left view.
The motion differential equation of each component of the vehicle system is established using the D’ Alembert’s principle. 19
The motion differential equation of car body as follow:
Vertical movement of carboy

Lateral movement of car body

Longitudinal movement of car-body

Roll movement of car-body

Pitch movement of car-body

Yaw movement of car-body

where
The motion differential equation of front bogies follows:
Vertical movement of front bogie
Lateral movement of front bogie

Longitudinal movement of front bogie

Roll movement of front bogie

Pitch movement of front bogie

Yaw movement of front bogie

The motion differential equation of rear bogies as follow:
Vertical movement of rear bogie

Lateral movement of rear bogie

Longitudinal movement of rear bogie

Roll movement of rear bogie

Pitch movement of rear bogie

Yaw movement of rear bogie:

where:
Verification of vehicle dynamics model
Accurate dynamic model is the basis of dynamic study of straddle-type monorail train. Therefore, the result of the test and simulation are compared.
The correctness of the model is verified by the real experimental vehicle test of Chongqing straddle monorail line 3 from Huixing station to Changfu road station. The head car and the second middle car are selected as the test car. The acceleration of the body is measured by acceleration sensor, and the running speed is measured by global positioning system (GPS). The instruments of the sensors employed in this test are illustrated in Figure 6. The main parameters of straddle-type monorail line 3 of Chongqing are given in Table 2. The four-formation train model of straddle-type monorail with 170 DOF is established by ADAMS (Figure7). The acceleration of the tested are compared with the simulation in order to verify the correctness of the dynamic model. The simulation and tested results exhibited in Figure 8.

Instruments of the sensors: (a) experiment train and (b) the arrangement of sensors.
Main parameters of the monorail.

Train dynamic model composed of four cars and three couples: (a) train dynamic model and (b) detail of dynamic model.
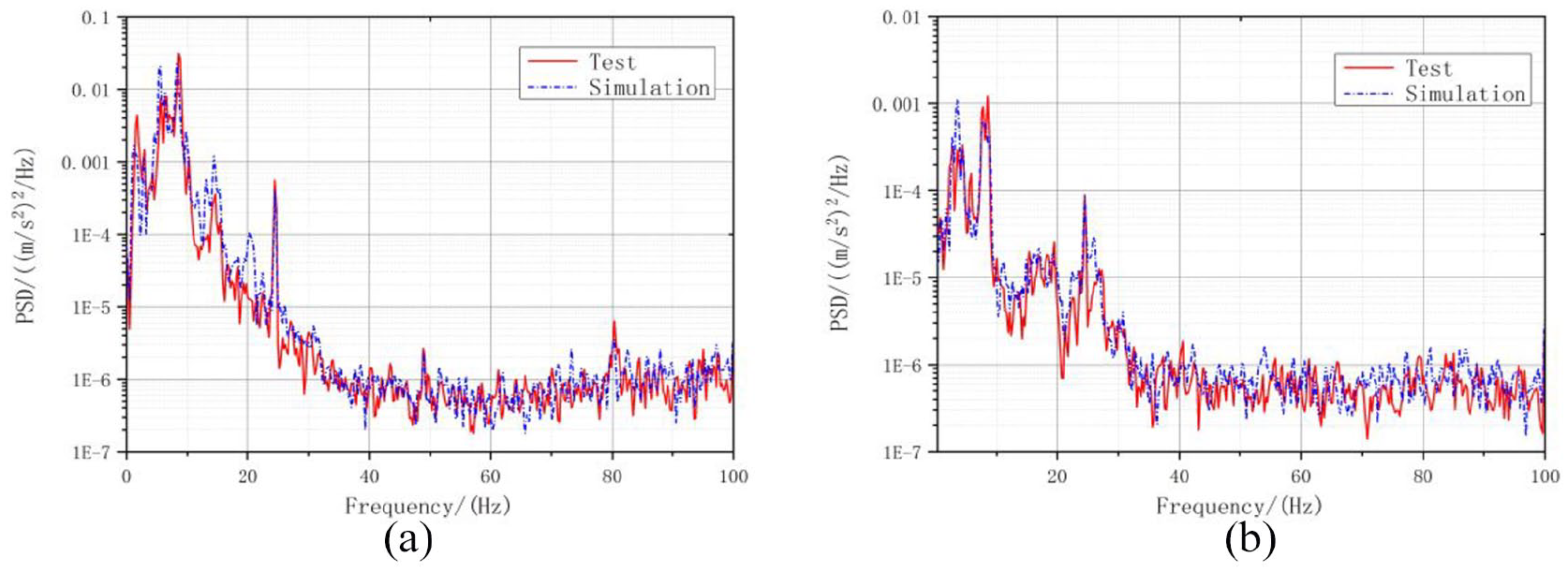
The comparison of test and simulation: (a) PSD of vertical acceleration and (b) PSD of transverse acceleration.
Each car has two bogies; each bogie has four running tires, four guiding tires, and two stabilizing tires. A car body has 6 DOF, each bogie has 6 DOF and each tire has one rotational DOF, so each car has 38 DOF. Each coupler has 6 DOF, so the four-formation train model of straddle-type monorail has 170 DOF totally.
Figure 8(a) shows the comparison of the vertical acceleration from simulated and test in the middle of car body floor when the running speed is 30 km/h. Figure 8(b) shows the comparison of the transverse acceleration from simulated and test in the middle of car body floor when the running speed is 30 km/h. From Figure 8, it can be seen that the frequency response of vertical and transverse acceleration spectrum of the simulated are in good agreement with that of the test in the low-frequency phase, except for some differences in the amplitude. Therefore, it can be included that the dynamic train model can accurately simulate the dynamic performance of the monorail train.
Evaluation criteria of dynamic curving behavior
The overturning coefficient is the most recognized safety evaluation index of train dynamic curving behavior in the railway field. The unique structure of straddle-type monorail determined that its dynamic performance is different from that of metro.
Compared with metro bogies, monorail bogies have guiding wheels and stable wheels, which play the roles of guiding and enhancing vehicle stability, respectively. Monorail vehicles have high stability because of the existence of stable wheels. As long as the force of the stabile wheels are not reduced to 0, even if the vertical force of the running wheel on one side of the bogie reduced to 0, the monorail can still run steadily. Therefore, on the basis of the overturning coefficient of vehicles, the overturning coefficient calculated from the radial force of stable wheels is added, which is used as the index to evaluate the dynamic curving behavior.
In this article, the overturning coefficient of vehicles calculated from the vertical force of running wheels is taken as one of the indexes to evaluate the anti-overturning performance of the monorail

where: P2 is the vertical force of running wheel on load increase side of vehicle, and P1 is the vertical force of running wheel on load reduction side of vehicle.
The radial force of the stabilizing wheel has a great influence on the overturning resistance of the vehicle. The anti-overturning performance of straddle monorail is evaluated by the load variation of the stabile wheels, which is named as the stabile wheel overturning coefficient

where F2 is the radial force of stable wheel on load increase side of vehicle, F1 is the radial force of stable wheel on load reduction side of vehicle.
When F2 = 0, one side of stabile wheel disengages from track stable surface. In order to prevent vehicle overturning, D2 < 1 must be guaranteed. In order to improve its safety level, it is stipulated that D2 < 0.8.
The simulation results of the dynamics performance
Comparison of vibration response
Vibration responses of straddle-type monorail train directly determine its dynamic performance. In order to compare the dynamic performance between train and single car.
The difference of acceleration vibration response between single car and train with four cars is compared at the speed of 80 km/h.
Compared with the train, the vertical vibration of the single car is higher than train when the main frequency of vertical vibration is 17 and 63 Hz which we can be seen from the vibration spectrum response of the vertical acceleration of the car body in Figure 9(a). The transverse vibration of the single car is higher than train when the main frequency of vertical vibration is 11 Hz which we can see from the vibration spectrum response of the transverse acceleration of the car body in Figure 9(b). In the train, the vertical and lateral vibration responses of the middle car are lower than that of the front car and rear car.
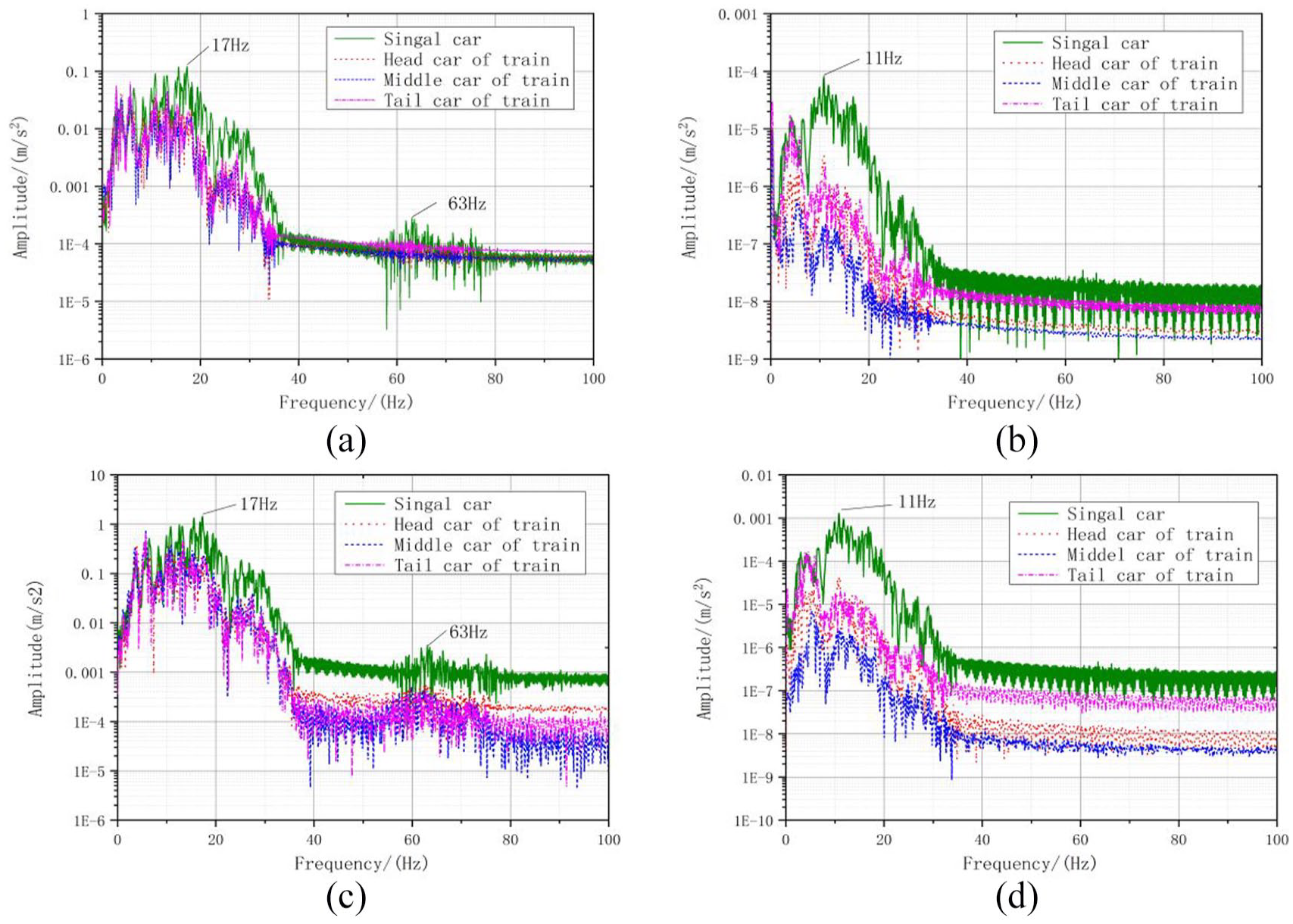
Comparison of power spectrum density of vehicle body acceleration: (a) vertical acceleration, (b) transverse acceleration, (c) pitch acceleration, and (d) yaw acceleration.
From Figure9(c), it can be seen that the pitch angle acceleration of single car is significantly different from that of train at the main frequencies of 17 and 63 Hz. This difference is also reflected in the spectrum response of the vertical acceleration. It can be seen that the coupler has a significant inhibition effect on the pitch motion of the car.
From Figure 9(d), it can be seen that the yaw acceleration of single car is significantly different from that of train at the main frequencies of 11 Hz. This difference is also reflected in the spectrum response of the transverse acceleration. It can be seen that the coupler has a significant inhibition effect on the yaw motion of the carriage. There is no restraint at the end of the body of single car, which results in a great difference between the pitch and yaw angles of single car and train. In the train, the pitch and yaw acceleration of the middle car is smaller than that of the head car and the tail car because the head car and the tail car have coupler constraints at only one side.
The difference of frequency response of the car body above-mentioned reflects the difference between the two models. When considering the dynamic performance related to vibration, such as train stability and riding comfort, the use of the single model will bring great errors. The train model which considering the influence of coupler device can accurately simulate the vibration behavior of the car body. At the same time, it proves the accuracy of the straddle-type monorail train model established in this article.
Comparison of riding comfort
The analysis results in section “Comparison of vibration response” shows that there are great differences between the single-car model and the train model in the vibration response. With the increase of running speed, the impact of track on tires becomes worse, which leads to the decrease of riding comfort. In order to analyze the difference of riding comfort between train model and single-car model, the riding comfort index of the train model and single-car model is compared at four speeds of 20, 40, 60, and 80 km/h.
Figure 10 shows the vertical and transverse riding comfort index varying with running speed, it can be seen from the comparison results that the single-car model will overestimate the train-riding comfort index. The maximum difference between the vertical riding comfort index of the single-car model and the train model is 0.26, the maximum difference between the transverse riding comfort index of the single-car model and the train model is 0.16, and such a large difference is unacceptable in practice. Therefore, it is not appropriate to study the riding comfort of straddle-type monorail using the single-car model, but by using the train model.

Comparisons of riding comfort index: (a) vertical a riding comfort index and (b) transverse riding comfort index.
At the same time, with the increase of vehicle speed, the riding comfort index of the single-car model and the train model increases. When the running speed increases from 20 to 40 km/h, the riding comfort index increases rapidly. When the running speed exceeds 40 km/h, the growth rate is flat. In the train model, there is little difference between the vertical riding comfort index of the head car, the middle car, and the tail car. For the transverse riding comfort index, the riding comfort index of the head car, the middle car, and the tail car are quite different, among which the head car has the worst stability and the middle car has the best stability.
Comparison of dynamic curving behavior
The minimum curve radius of straddle monorail vehicle is 100 m. Therefore, the curve passing performance of single car and train are compared when the curve radius is 100 m.
In Figure 11, FL is the front left side of running wheel in the bogie, FR is the front right side of running wheel in the bogie, RL is the Rear left side of running wheel in the bogie, and RR is the Rear right side of running wheel in the bogie.

The vertical force of running wheel: (a) front bogie of single car, (b) rear bogie of single car, (c) front bogie of head car, (d) rear bogie of head car, (e) front bogie of middle car, (f) rear bogie of middle car, (g) front bogie of tail car, and (h) rear bogie of tail car.
Figure 11 shows the vertical force of the running wheels when the two models pass through the curve track of R100. Table 3 show the overturning coefficients of vehicles calculated from the vertical force of running wheels. Whether the single-car model or the train model, their overturning coefficient is less than 0.8, which meets the requirements of the standard GB5599-1985. The overturning coefficient of single-car model is 0.429. In the train model, the overturning coefficient of head car, middle car, and tail car are 0.430, 0.423, and 0.431, respectively. The maximum difference of overturning coefficient between single-car model and train model is 0.006, and the error is acceptable. Therefore, the overturning coefficient of straddle monorail vehicle can be calculated by the single-car model without causing too much error.
Vehicle overturning coefficients.
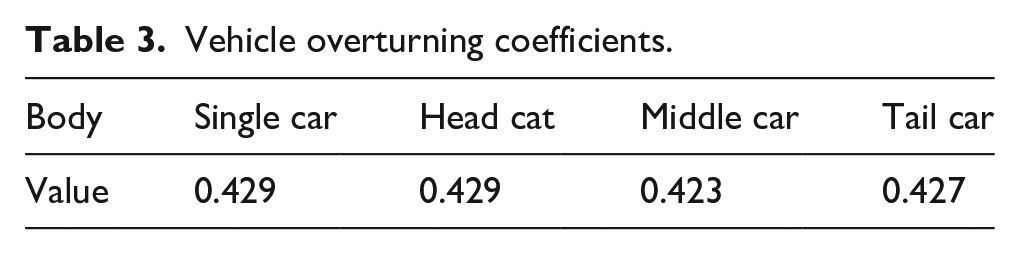
In the train model, the overturning coefficient of the tail car is the largest and the middle car is the smallest. Therefore, the coupler force has a slight impact on the overturning coefficient in the train model.
In Figure 12, L is the left side of stable wheel in the bogie, R is the right side of stable wheel in the bogie.

The radial force of the stable wheels: (a) front bogie of single car, (b) rear bogie of single car, (c) front bogie of head car, (d) rear bogie of head car, (e) front bogie of middle car, (f) rear bogie of middle car, (g) front bogie of tail car, and (h) rear bogie of tail car.
Figure 12 shows the radial force of the guide wheels when the two models pass through the curve track of R100. Table 4 shows the stable wheel overturning coefficients of vehicles calculated from the radial force of the guide wheels. Whether the single-car model or the train model, their guide wheel overturning coefficient is less than 0.8, which meets the requirements of the specified value. The stable wheel overturning coefficient of single-car model is 0.246. In the train model, the stable wheel overturning coefficient of head car, middle car and tail car are 2.54, 0.238 and 0.279, respectively. The maximum difference of overturning coefficient between single-car model and train model is 0.033, and the error is acceptable. Therefore, the stable wheel overturning coefficient of straddle monorail vehicle can be calculated by the single-car model without too much error.
Stable wheel overturning coefficient.
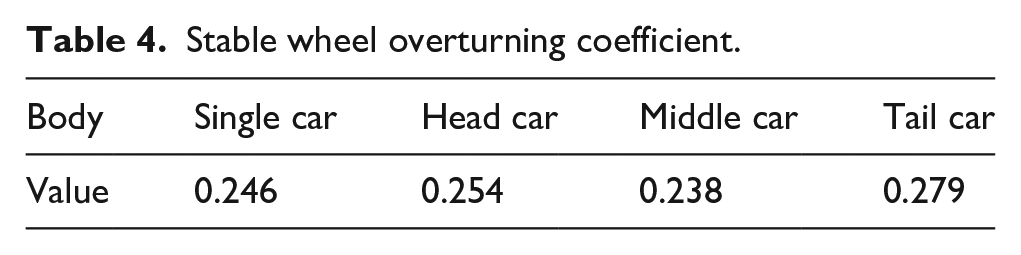
In the train model, the stable wheel overturning coefficient of the tail car is the largest and that of the middle car is the smallest. Therefore, the coupler force has a slight impact on the overturning coefficient in the train model.
The trend of stable wheel overturning coefficient is consistent with that of overturning coefficients of vehicles calculated from the vertical force of running wheels.
This is because there are coupler devices at both side of the middle car, which can better restrain the car body roll when crossing the curve track.
In conclusion, the difference between guide wheel overturning coefficient and overturning coefficient of single-car model and train model is very small. The dynamic curving behavior of straddle-type monorail train can be calculated by single-car model without too much error.
Conclusion
This article focus on the dynamic behavior of straddle-type monorail composed of multiple vehicles. The coupler dynamic model of straddle-type monorail vehicle is established, and then the four-car dynamics model of straddle-type monorail considering the coupler force is established. The dynamic behavior of single car and train are analyzed in ADAMS.
The results show that when considering the dynamic performance related to vibration, such as train stability and riding comfort, the vibration response of car body. The accelerations obtained by single-car model are much different from that obtained by train model. The train model which considering the influence of coupler device can accurately simulate the vibration behavior of the monorail.
The riding comfort of straddle-type calculated by the single-car model would make large mistake, and a multiple train model is needed. Because the single-car model will overestimate the riding comfort index. In the train model, there is little difference between the vertical riding comfort index of the head car, the middle car and the tail car. For the transverse riding comfort index, the riding comfort index of the head car, the middle car and the tail car are quite different, among which the head car has the worst stability and the middle car has the best stability.
The difference between guide wheel overturning coefficient and overturning coefficient of single-car model and train model is very small. The dynamic curving behavior of straddle-type monorail obtained by the single-car model could represent the dynamic curving behavior well.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the National Natural Science Foundation of China (Project Number: 51475062), Project Name: Research on the Mechanism and Control Method of Monorail Trains Running Tires’ Shoulder Wear and this study were funded by the Chongqing graduate science and technology innovation project: (Project Number: 2108B0107), Project Name: Dynamic analysis of monorail pantograph system; Chongqing Key Laboratory of Urban Rail Transit System Integration and Control Open Fund. Project Name: Research on active control of straddle monorail vehicle with single-axle bogie; Study on vehicle rail coupling dynamics of straddle monorail vehicle.