
Abstract
Three different control cases in control air suspensions using air springs controlled (ASC), (2) using the damper controlled (DC), and (3) using both ASC and DC (ASDC) are proposed to ameliorate both riding quality and friendliness-road surface of heavy vehicle based on the heavy vehicle’s dynamic model and fuzzy logic control with its control rules optimized by genetic algorithm. The riding quality and friendliness-road surface are assessed through the root-mean-square cabin accelerations (a wzc and a wϕc ) and coefficient of the dynamics load (CDL n ) at wheel axles. Research shows that the vehicle’s riding quality and friendliness-road surface are strongly affected by the moving speed and road surface roughness. The a wzc , a wϕc , and CDL n of the control air suspensions are strongly decreased compared to passive air suspensions, particularly with ASDC. Additionally, a wzc and a wϕc of DC are smaller than that of ASC whereas the maximum CDL n with DC is higher than that of ASC. Thus, DC could be used for improving vehicle’s riding quality, ASC should be applied for ameliorating vehicle’s friendliness-road surface, and ASDC should be applied for ameliorating both riding quality and friendliness-road surface of heavy vehicles.
Keywords
Introduction
To enhance the riding quality and friendliness-road surface of heavy vehicle, air suspensions designed by air springs have been applied to replace the traditional suspension systems of heavy vehicle.1–4 The dynamic characteristics of the air springs have been also researched for assessing the isolation ability and stability in air suspensions. Result of the dynamic stiffness in the air spring under the excitations of 2.0 Hz to 6.0 Hz has been strongly increased, thus, the deformation of the air spring and the impact force of the wheels on the road were significantly reduced compared to traditional suspensions using steel-springs and steel-leafs.5–7 As a result, the vehicle’s friendliness-road surface was significantly ameliorated. However, under excitations of the frequency from 8.0 to 50 Hz researched, the dynamics stiffness in air springs was strongly reduced, so the air spring’s deformation was higher than the traditional suspensions and the heavy vehicle’s riding quality was low. Thus, the damper has been added to the air suspension to decrease the suspension system’s deformation and improve heavy vehicle’s vibration.
To further enhance the riding quality of heavy vehicles equipped with air suspensions, the damping coefficient in air suspensions using the magnetorheological (MR) fluid was also researched and controlled based on the optimal fuzzy control and Proportional-Integral-Derivative-fuzzy control.8–10 The studies indicated that through the evaluation index of vehicle’s accelerations, the control air suspension using the damper controlled (DC) remarkably ameliorated vehicle’s riding quality. Besides, in some studies on control air suspension systems, the dynamics stiffness in air springs has been also researched and controlled by the valve in the air pipe used to connect the air spring and reservoir. The studies indicated that based on the coefficient of dynamic load (CDL) and road damage, the control air suspension using the air spring controlled (ASC) by the air valve reduced the wheel’s dynamic force and value of CDL, thus, the vehicle’s friendliness-road surface using ASC was better than that of uncontrol air suspensions.5,7,11,12 However, in the above studies, some existing issues of the heavy vehicle that have not yet been resolved including (1) the control performance between the ASC and DC on improving both riding quality and friendliness-road surface of the vehicle has been not researched yet. (2) Heavy vehicle’s control air suspension using both the air spring controlled and damper controlled (ASDC) could ameliorate the riding ride quality and friendliness-road surface better than that of the single control method of the DC or ASC, however, this issue has been also not researched yet. (3) The advanced-control approaches of the fuzzy and genetic algorithm combined, skyhook-fuzzy combined, or fuzzy-neuro control combined have been used for controlling car’s active/semi-active isolation systems.10,13–17 Especially, with control rules in the fuzzy logic control optimized based on the genetic algorithm, fuzzy logic control can further enhance its control performance.14,15 However, this advanced control method has been also not investigated for controlling heavy vehicle’s pneumatic suspension systems yet.
In this study, three different control cases of the control air suspension using the ASC, DC, and ASDC are proposed for improving heavy vehicle’s riding quality and friendliness-road surface based on the advanced control method of fuzzy logic control and heavy vehicle’s dynamic model. In order to enhance the performance in control air suspensions, the fuzzy control’s rules are also optimized by genetic algorithm. The vehicle’s performance is assessed througth both riding quality and friendliness-road surface defined by the root-mean-square cabin acceperation responses and CDL n at wheel axles n. Improving both riding quality and friendliness-road surface is the goal in this study.
This study’s contributions is summarized as follows: • The heavy vehicle’s dynamic model and the advanced method of fuzzy logic control combined with the genetic algorithm have been applied to study the ride quality and road surface friendliness of heavy vehicle. • Three different control cases in control air suspensions using ASC, DC, and ASDC are proposed to enhance the ride quality and road surface friend-liness of heavy vehicles. • The performance of the heavy vehicle using the control air suspensions has been simulated and evaluated under all different working conditions in both the time and frequency domains.
Mathematical approach
Mathematical model in heavy vehicles
From the actual structure in heavy vehicles with suspension systems equipped with air suspensions, a five-axle heavy vehicle using the control air suspensions has been used. A mathematical model of the vehicle using 11 degrees of freedom has been built for evaluating the isolation efficiency of heavy vehicle’s air suspensions with three different control cases, as plotted in Figure 1. where M
c
, M
td
, M
t
, and M
ai
are the weight of the cabin, tractor-driver, trailer, and air suspension axles. Z
c
, Z
td
, Z
t
, and Z
ai
are the vertical vibration of the cabin, tractor-driver, trailer, and air suspension axles (front air suspension, middle air suspension, and rear air suspen-sion). ϕ
c
, ϕ
td
, ϕ
t
, and ϕa2−3 are the angular vibration of the cabin, tractor-driver, trailer, and two air suspension axles (middle air suspension, and rear air suspension). F0 is the articulation connection’s force of the trailer and tractor-driver. F
cj
are the vertical forces in cabin’s front/rear isolations. F
ai
are forces of the front air suspension, middle air suspension, and rear air suspension. F
tn
are the vertical dynamic responses at the wheels. {Cc1, Kc1} and {Cc2, Kc2} are damping/stiffness parameters in cabin’s front and rear suspensions. {C
tn
}, {K
tn
}, and q
n
are the damping parameter, stiffness parameter, and vibration excitation of the first-, second-, third-, fourth-, and fifth-wheel. l0 and l
n
are heavy vehicle’s longitudinal distances (n = 1, 2, 3, 4, 5; i = 1, 2, 3; j = 1, 2). (a) Mathematical model of heavy vehicle and (b) suspension models of the cabin and wheels.
By using Newton’s second law to calculate the vibration equations of the heavy vehicle via its mathematical model in Figure 1, the vibrational equations using air suspensions are presented by:











The F cj , F0, and F tn are calculated by:
The F
cj
of the cabin,


The F0 at the articulation connection,






The F ai of the front, middle, and rear air suspension is calculated in the next section.
Models of control air suspension
The structure of each front air suspension, middle air suspension, and rear air suspension of the heavy vehicle is designed by an air spring and a damper. The air spring connects into the reservoir through a valve and pipe (the air valve is controlled). The damper is used by the MR fluid to control its damping coefficient, as plotted in Figure 2(a). To evaluate vehicle’s performance using the control air suspensions, from the model of passive air suspension (PS) using damper uncontrolled and air spring uncontrolled,5,6,18 three different control cases of the air suspension system including (1) control air suspension using the ASC controlled by the air valve and the damper uncontrolled, (2) control air suspension using the DC via the MR fluid and the air spring uncontrolled, and (3) control air suspension using both the air spring controlled and damper controlled (ASDC) are then researched. The mathematical models of the control air suspension using ASC, DC, and ASDC have been described in Figure 2(b)–2(d), respectively. Where V
r
and p
r
are the reservoir’s volume and reservoir’s pressure. V
e
, p
b
, and A
b
are the volume, pressure, and air spring’s effective-area. A
p
, M
b
, and L
p
are the cross-section-area, air mass, and length in pipe. K
v
is viscous stiffness parameter, K
e
is static stiffness parameter, and M is air mass in air spring. C
β
and C
p
are passive damping coefficients. C
β-act
and C
act
are the active damping coefficients in heavy vehicle’s air suspension. δ is air’s movement in pipe. Z
b
is heavy vehicle’s body vibration and Z
a
is wheel axle’s vibration. (a) Air suspension structure, (b) with air springs controlled, (c) with damper controlled and (d) with ASDC.
The F
ai
of the air suspensions is calculated by:

Air spring’s dynamic characteristics have been researched in the existing studies.1,2,5–7 Therefore, to simplify the calculation process the force response F
air-spring
, dynamic parameters in air spring including the K
v
, K
e
, and M are calculated as follows: 5,6



Based on the calculation result of air spring’s viscous force (F
v
) in Ref. 6 and damping parameter C
β-act
controlled by the valve, the F
v
is expressed by:

Thus, the air spring’s has been calculated by:

Besides, F
damper
of the damper has been calculated by:

By combining Equations (25) and (26), the force response F
a
of the air suspension in equation (20) with three different control cases using the ASC in Figure 2(b), using the DC in Figure 2(c), and using the ASDC in Figure 2(d) has been rewritten by:

Vibration of road surface
The excitation of the road greatly affects the vehicle’s vibration and it is used to evaluate the isolation ability in air suspension systems. The road surface could be represented with a realization of the random process described by the power spectral density.7,9,17,19 The power spectral density in the random road has been expressed as follows:

Assuming the roughness of the road surface is built based on the random process of Gaussian. Thus, it is generated via the function of Fourier transformation by:

To build the road surface roughness for simulating the vibration of the heavy vehicle, based on the random function of q(t) and the different classes of the road from B-class to E-class carried out based on the International Organization for Standardization (ISO) 8068.
19
The simulating results of the typically random surfaces of the road from ISO B-class to E-class are shown in Figure 3. Random excitations of heavy vehicle.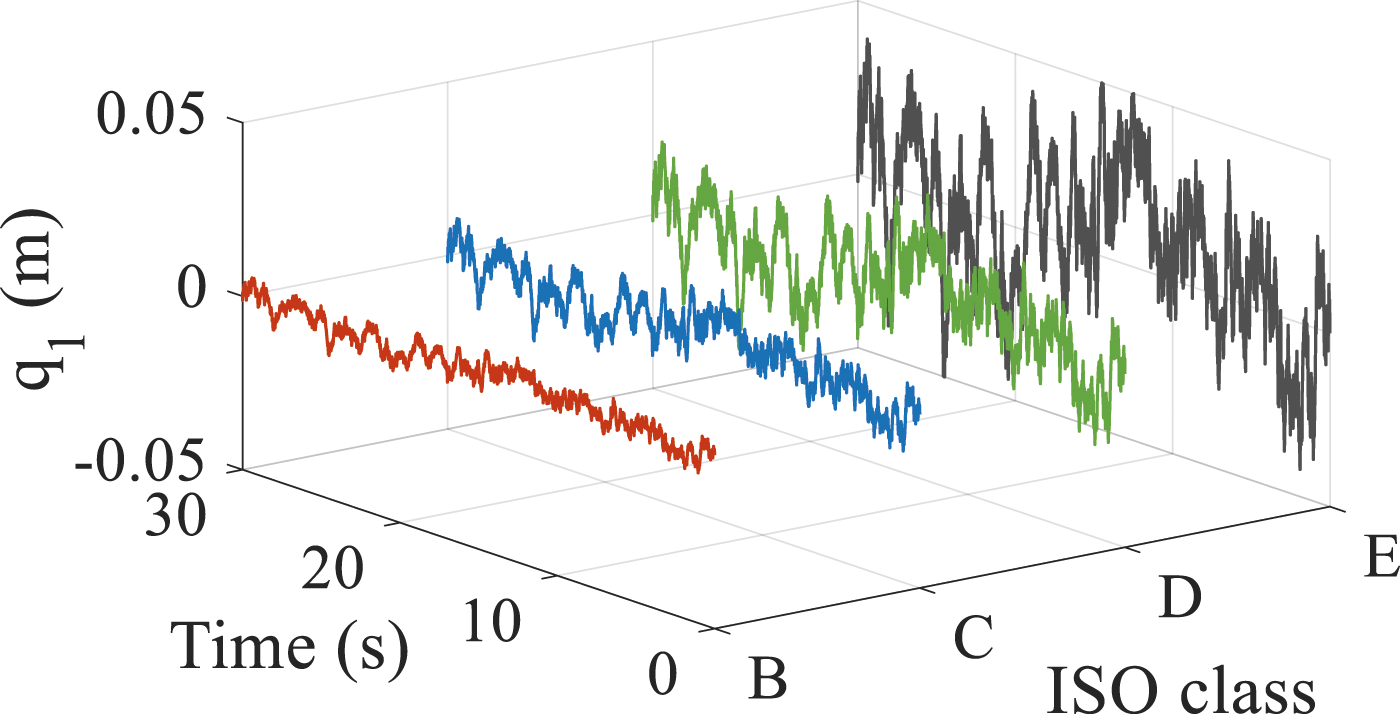
Evaluation index of the isolation performance
In the evaluation of the isolation ability in vehicle’s suspension systems, three indexes of the riding quality, friendliness-road surface, and suspension’s working space have been applied as the evaluating indexes, especially the riding quality for automotives and friendliness of the wheel and road for heavy vehicles.7,9,14,17,20 With the heavy vehicle used in this study, the riding quality of heavy vehicle has been assessed through root mean square values of vertical and pitching acceleration responses of the cabin (a
wzc
and a
wϕc
). These two values are calculated based on ISO 2631-1 as follows
20
:


The friendliness-road surface of heavy vehicle is evaluated via the interaction between the dynamics force of the road and wheel defined by the CDL as7,11:
The research in Ref. 7 showed that with 0 < CDL < 0.05, this means that the heavy vehicle is traveling on a very smooth road, with 0.05 ≤ CDL ≤ 0.4, the heavy vehicle is traveling on a normal road, and with CDL > 0.4, this means that the heavy vehicle is traveling on a very poor road and the contact of road and wheel was broken.
Therefore, to evaluate the control ability in air suspensions of heavy vehicles using the ASC, DC, and ASDC in ameliorating the riding quality and friendliness-road surface, the smaller values of the a wzc , a wϕc , and CDL n have been used as the evaluation indexes.
Control of heavy vehicle air suspension
Applying fuzzy control
Fuzzy control is a controller that does not depend on the working conditions of the system, accordingly, it is applied in various control fields, especially automobile suspension control.7,13–15 However, its control efficiency depends on control rules. In order to enhance the fuzzy control’s efficiency, in this study, its control rules are optimized by a genetic algorithm, and it is then applied to control vehicle’s air suspensions. In air suspensions of heavy vehicle, all the front air suspension, middle air suspension, and rear air suspension need to be controlled. However, the design and application of fuzzy logic control on the heavy vehicle’s control air suspensions are similar. Thus, only one fuzzy control has been designed and applied to control C v-act of the ASC, C act of the DC, or both C v-act and C act of ASDC in equation (27) as follows:
Based on two input signals of the displacement and speed in vehicle’s air suspension defined by e = Z
b
− Z
a
and ec = d(Z
b
− Z
a
)/dt the control rules in fuzzy-inference-system (FIS) optimized by genetic algorithm are then computed and given the optimal damping parameter of C
v-act
with the ASC, C
act
wiht the DC, or both C
v-act
and C
act
with the ASDC to control the heavy vehicle’s air suspension (see Figure 4). In the control process of the fuzzy control, two input signals {e, ec} in the fuzzification-interface have been transformed into linguistic variables, the fuzzy-inference-system then computes control values through the optimal inference rules, finally, the defuzzification-interface transforms the linguistic variables to the physical quantities of output signal “C
v-act
with the ASC, C
act
wiht the DC, or both C
v-act
and C
act
”.
13
Control model of the heavy vehicle’s air suspension using optimal control algorithm.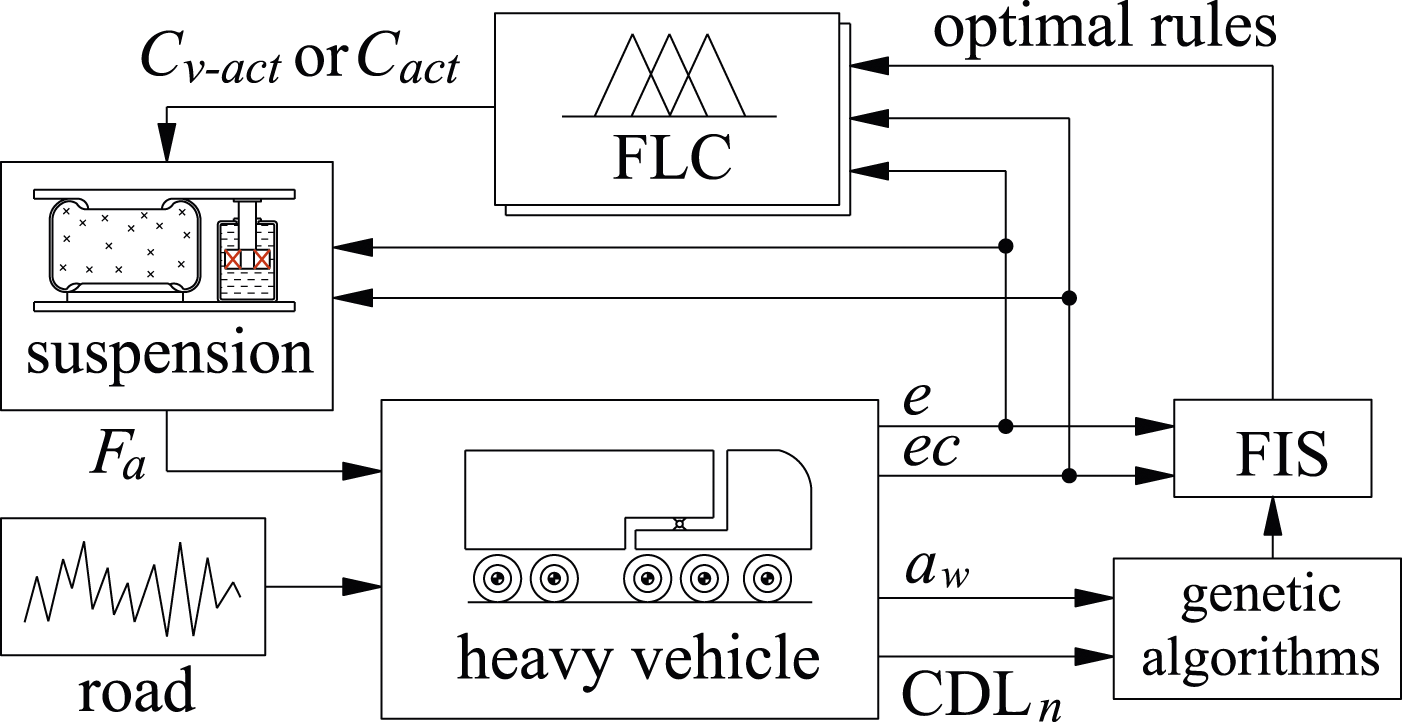
Input/output variables with the air springs controlled and damper controlled.

In order to enhance the efficiency of the fuzzy control, FIS’s initial rules are then optimized by using the genetic algorithm in Optimizing control rules.
Optimizing control rules
Genetic algorithm is applied for searching random variables of n = [n1, n2, …, n
x
]
T
to obtain the minimum A(n) or maximum A(n) as follows16,17: 
Subject to p x (n) ≤ 0, x = 1, 2, … , X and q y (n) = 0, y = 1, 2, … , Y.
In this study, the genetic algorithm is used for optimizing the control rules in fuzzy control to obtain minimum values of a wzc , a wϕc , and CDL n . The optimization process is performed via three steps as follows: (1) Establishing the initial population and encoding: To simplify the process of finding control rules in the FIS, the input variables of e and ec defined by “Nb, Ns, Zo, Ps, and Pb” and output linguistic variables of C v-act or C act defined by “S, Ms, M, Mb, and B” have been encoded by [0, 1, 2, 3, 4] = [a i ]1×5 and [5, 6, 7, 8, 9] = [b i ]1×5. In addition, the size in initial populations is set up by 100, in which individuals in 100 of initial populations have been randomly created and each gene in an individual has been also randomly selected by 0 ≤ a i ≤ 4 and 5 ≤ b i ≤ 9.
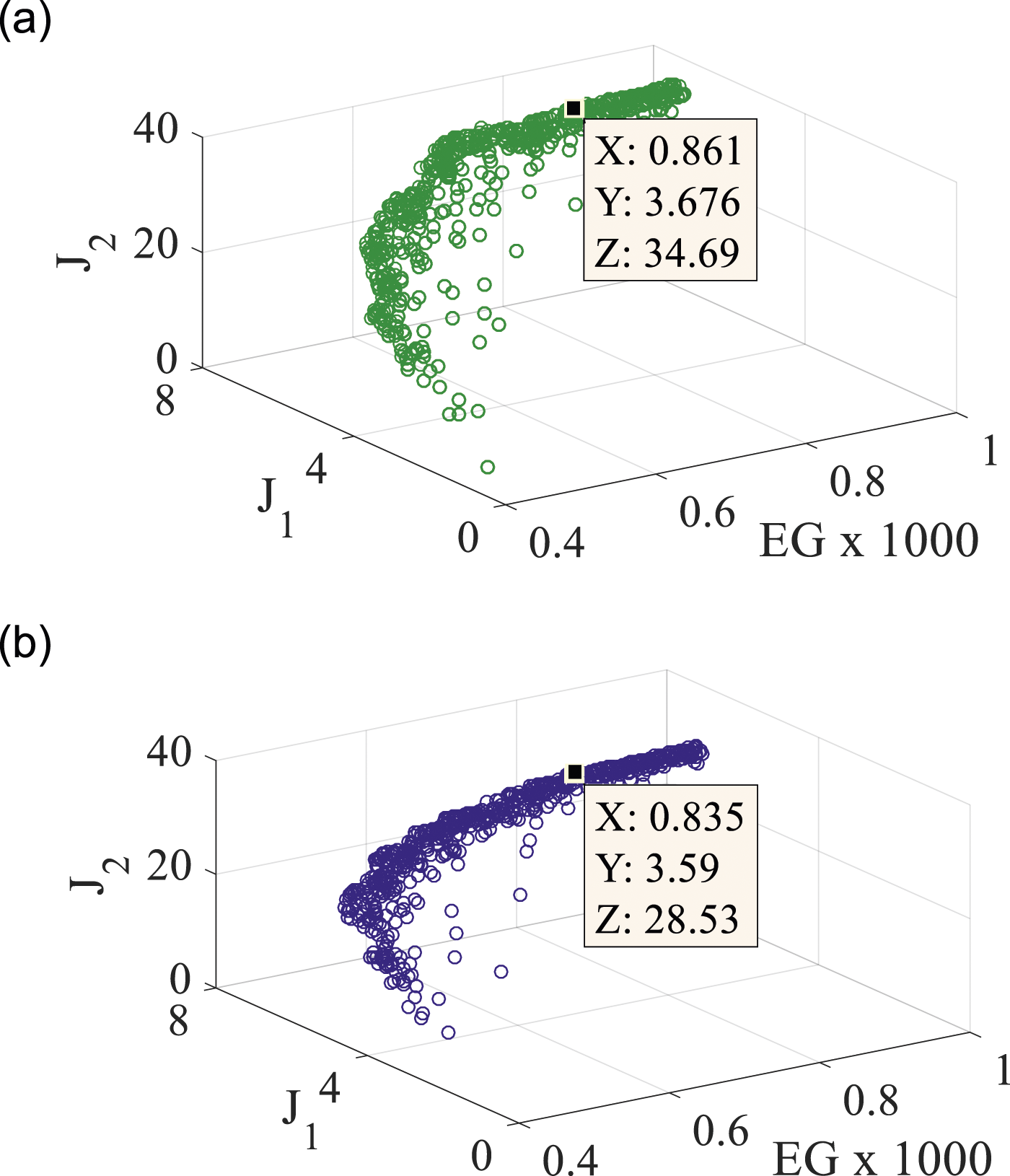
(2) Objective functions and fitness values: To obtain minimum values of a
wzc
, a
wϕc
, and CDL
n
in equations (30)–(32), the fitness value of J1 given to calculate the ride quality and the fitness value of J2 given to calculate the friendliness-road surface are defined by: Simulation and optimization flowchart of the heavy vehicle and genetic algorithm.

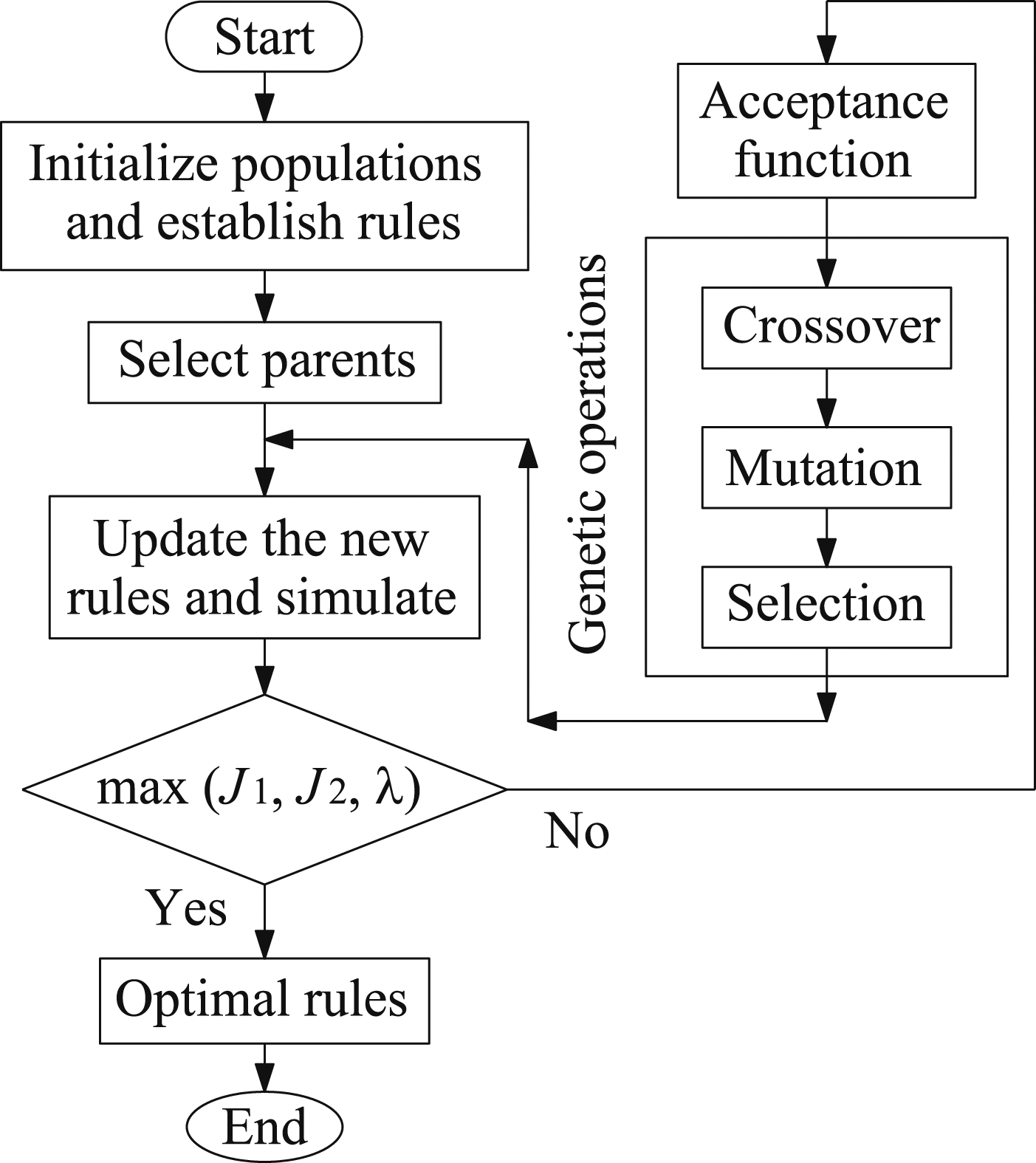
(3) Genetic operations: For enhancing the optimization efficiency and reducing the optimization time of genetic algorithm, a genetic operation with 5% of mutation probability and 95% of crossover probability in 1000 of the evolutionary generations has been established to perform the process of the crossover and mutation to create new individuals. Then, via the obtained results of J1 and J2, only optimal control rules that satisfy the condition will exist in the next generation. This process is repeated until the stopping condition of the genetic algorithm is satisfied.
Optimized results in fuzzy control’s rules
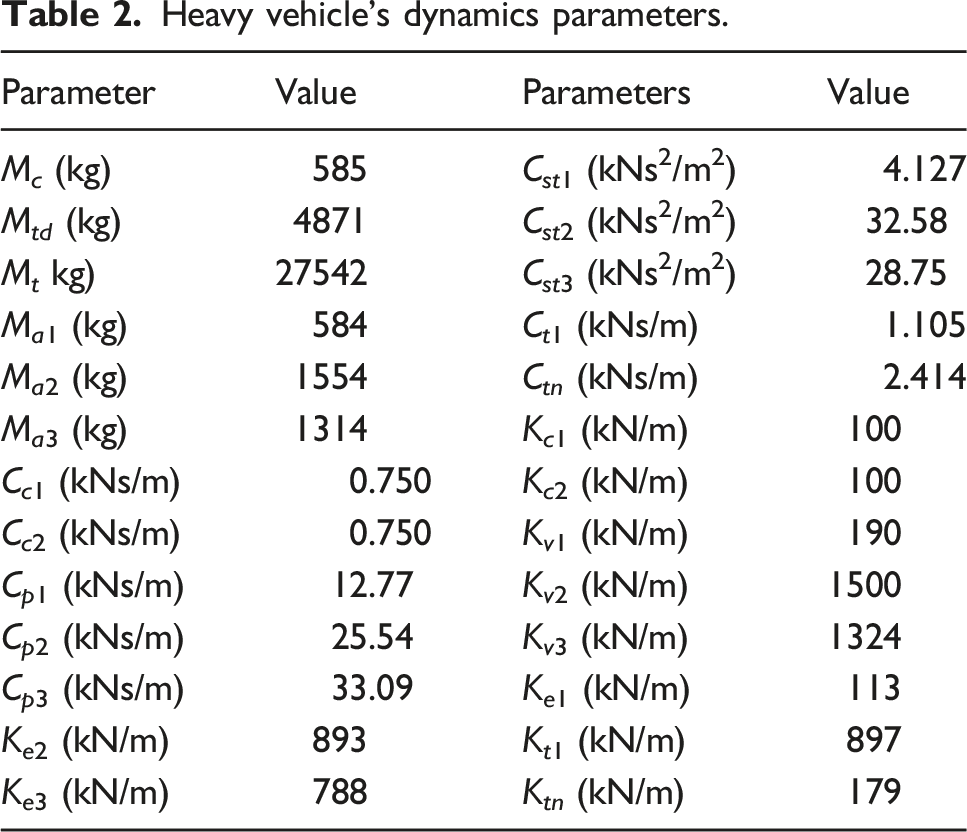
Heavy vehicle’s dynamics parameters.
(a) Optimal rules for air springs controlled and (b) for damper controlled.
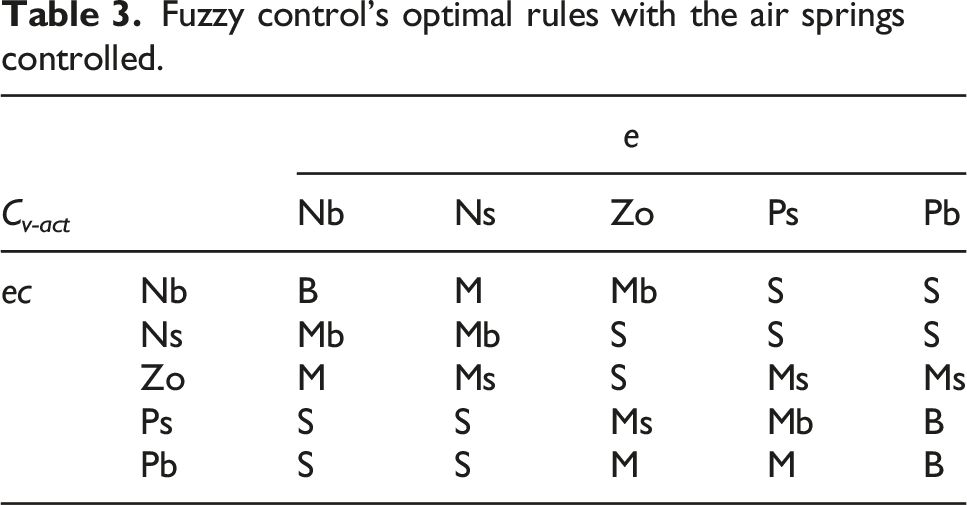
Fuzzy control’s optimal rules with the air springs controlled.
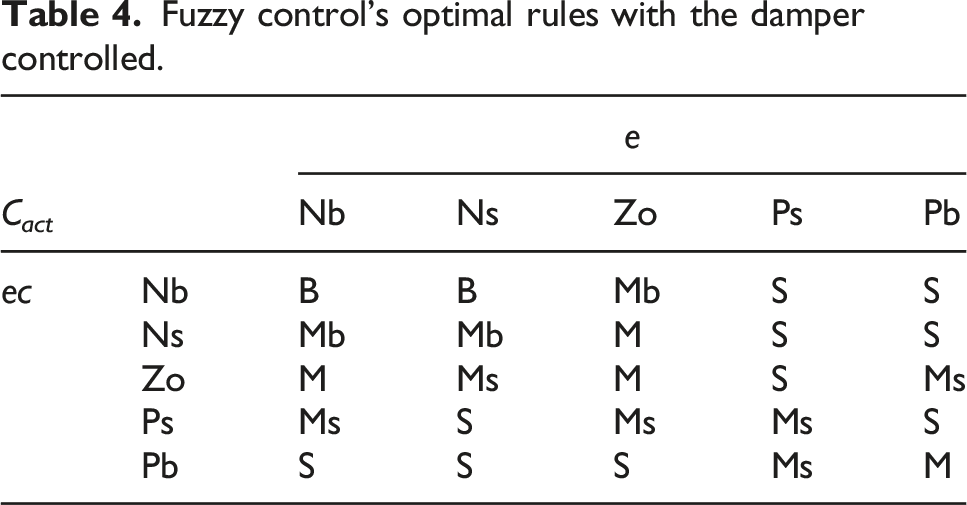
Fuzzy control’s optimal rules with the damper controlled.
Simulation and analysis results
Isolation ability of air suspensions using three various control cases
In order to assess the isolation efficiency of air suspensions using three different control cases of the ASC, DC, and ASDC, from design parameters of heavy vehicle provided in Table 2 and optimal control rules of C
v-act
and C
act
listed in Tables 3 and 4, the MATLAB/SIMULINK software is used for the simulation. The simulation results in the cabin’s accelerations and wheel axle’s dynamics force response when heavy vehicle is traveling at the road surface of ISO C-class at v = 20 m/s are plotted in Figure 7. From the cabin’s acceleration responses and dynamics forces at wheels simulated in Figure 7, the results of the a
wzc
, a
wϕc
, and CDL
n
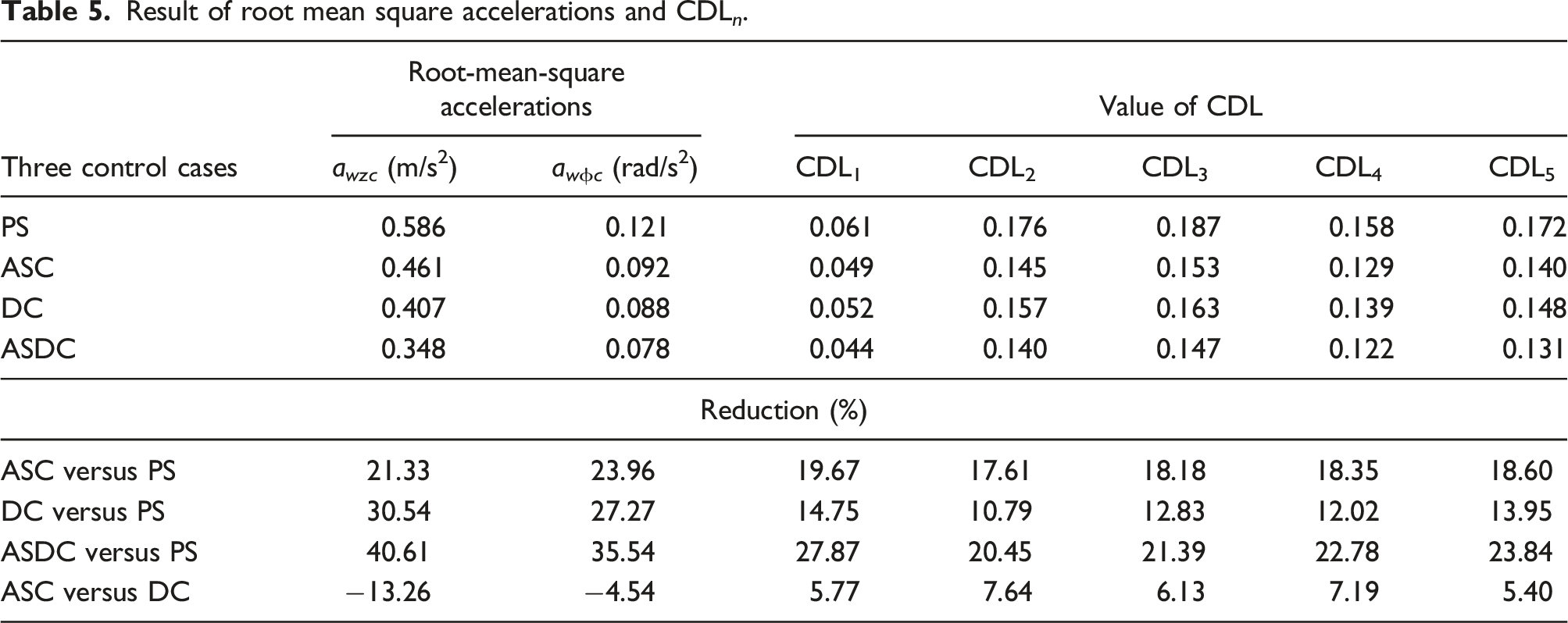
with the PS, ASC, DC, and ASDC are also computed and listed in Table 5. Figure 7 and Table 5 show that with heavy vehicle using the PS, both the cabin’s acceleration responses and dynamics force responses at the wheel axles are very high, thus, the riding quality and friendliness-road surface of the heavy vehicle are low. Moreover, the value of CDL3 is higher than the values of CDL1, CDL2, CDL4, and CDL5. (a) Cabin’s vertical acceleration, (b) cabin’s pitch acceleration and (c) force response of 3rd wheel axle on ISO C-class. Result of root mean square accelerations and CDL
n
.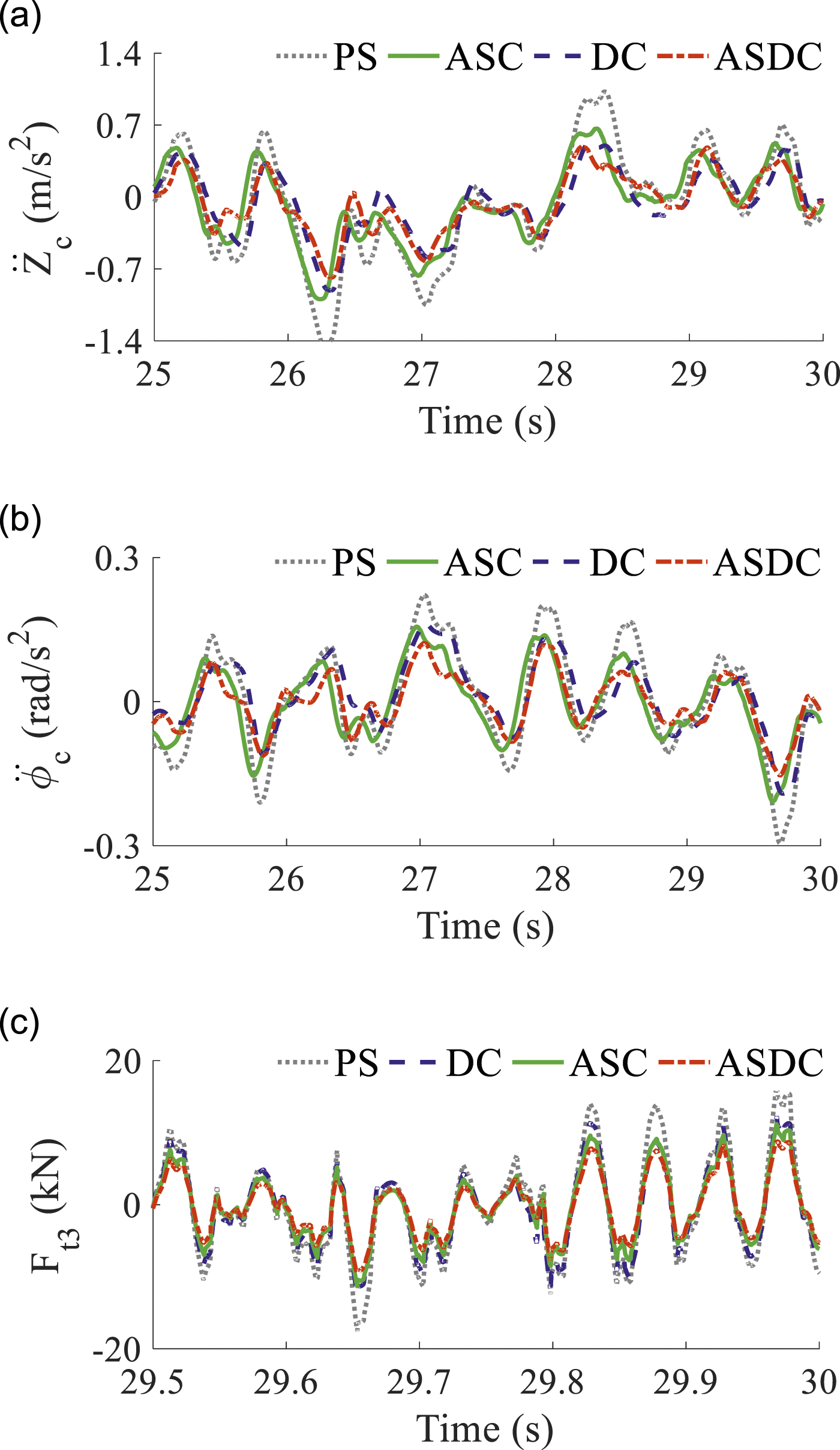
Thus, the influence of the third wheel axle on damaging road surface is high, so it needs to be evaluated in the design and control process of the heavy vehicle’s suspension systems. With heavy vehicle’s air suspensions applying the ASC, DC, and ASDC, both the cabin’s acceleration responses and dynamics force responses at wheel axles have been greatly decreased compared to the PS. This means that the riding quality and friendliness-road surface of the heavy vehicle is improved by using control air suspensions.
With using three different control cases of the ASC, DC, and ASDC, results in Table 5 show that both a wzc and a wϕc of the ASC, DC, and ASDC are strongly decreased by {21.33% and 23.96%}, {30.54% and 27.27%}, and {40.61% and 35.54%} compared to the PS. Besides, the maximum CDL3 with the ASC, DC, and ASDC is also strongly decreased by 18.18%, 12.83%, and 21.39% compared to the PS, especially with ASDC. In addition, the a wzc and a wϕc of the DC are smaller than that of the ASC by 13.26% and 4.54% whereas the maximum CDL3 with the DC is higher than that of the ASC by 6.13%. These results mean that the DC can improve the riding quality of heavy vehicle better than the ASC while ASC can improves the friendliness-road surface of heavy vehicle better than the DC. This is the reason why most damping coefficients in car’s isolations are mainly controlled to improve the riding comfort9,13,14 while the heavy vehicle’s suspension systems are mainly equipped with air suspensions or control air suspensions to reduce the damaging road surface.4,5,7
With using the ASDC, results in Table 5 indicate that all a wzc , a wϕc , and CDL n are also lower than that of the ASC and DC. Therefore, in order to improve both riding quality and friendliness-road surface in heavy vehicle simultaneously, the control method of the ASDC should be applied.
Control performance of air suspensions under different speeds
With heavy vehicle traveling on the road, the moving speed of the vehicle can be changed and affect the control efficiency of the ASC, DC, and ASDC. To assess the stability of these three different control cases, the different speeds changed from 2.5 to 30 m/s of heavy vehicle are simulated. Results in a
wzc
, a
wϕc
, and CDL3 have been shown in Figure 8(a)–8(c), respectively. (a) Cabin’s vertical acceleration, (b) cabin’s pitch acceleration and (c) CDL3 at 3rd wheel axle under various speeds.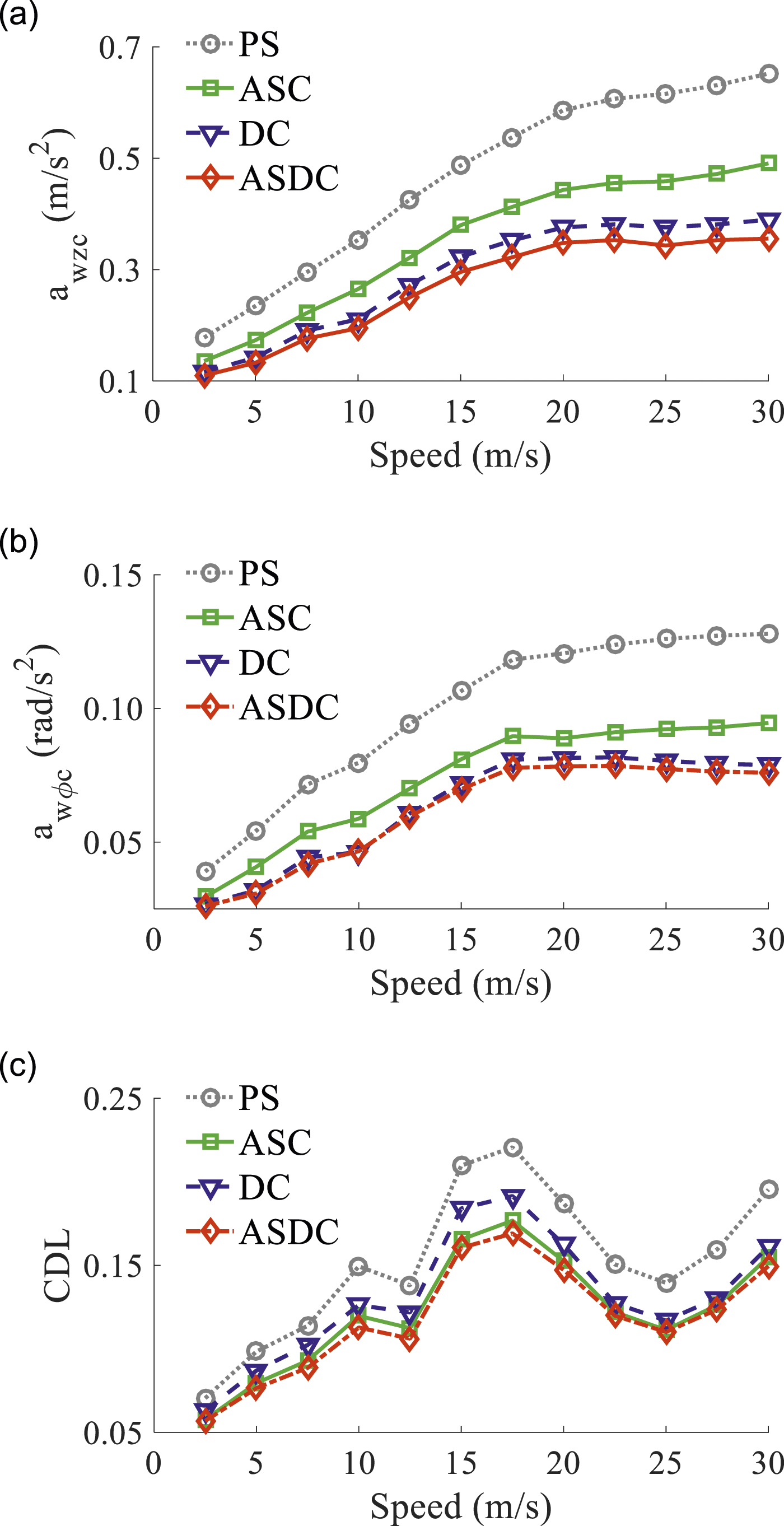
Results with PS, ASC, DC, and ASDC in Figure 8 indicate that the heavy vehicle’s moving speeds greatly affect the riding quality and friendliness-road surface. All values of the a wzc , a wϕc , and CDL3 are low when the vehicle is moving at speeds of 2.5÷12.5 m/s. This means that the riding quality and friendliness-road surface in the vehicle are good. When the vehicle is moving at speeds of 12.5÷20 m/s, all values of a wzc , a wϕc , and CDL3 are strongly increased, especially at 17.5 m/s. This means that both riding quality and friendliness-road surface in the vehicle are strongly decreased. Thus, the heavy vehicle should limit movement at this speed range to ameliorate the riding quality and friendliness-road surface. When the vehicle’s moving speed is increased from 20÷30 m/s, both values of a wzc and a wϕc are insignificantly changed while value of CDL3 is strongly reduced from 20÷25 m/s and strongly increased from 25÷30 m/s. Therefore, in order to ameliorate the riding quality and friendliness-road surface, heavy vehicle’s speeds from 20÷25 m/s should be used when the vehicle is moving. This is also the reason why highways often regulate the heavy vehicles to travel at the speeds of 20÷25 m/s.7,12
With using different methods of the ASC, DC, and ASDC in heavy vehicle’s air suspensions, all values of a wzc , a wϕc , and CDL3 are strongly decreased in comparison with PS, especially, the a wzc , a wϕc , and CDL3 with the ASDC are the smallest under the different moving speeds of the heavy vehicle. Besides, both a wzc and a wϕc with the DC are lower than that of the ASC (see Figure 8(a) and 8(b)) while CDL3 with the DC is higher than that of the ASC (see Figure 8(c)) under the vehicle’s different moving speeds. This means that the control performance between the ASC, DC, and ASDC is relatively stable under various moving speeds.
Control performance of air suspensions under different road surfaces
With heavy vehicle traveling on the road, the road’s height of the road surface roughness can also affect the riding quality and friendliness-road surface of the vehicle as well as the control performance of the ASC, DC, and ASDC. To assess the performance and the stability of these three different control cases, four different road surface roughnesses of ISO B-class, C-class, D-class, and E-class have been simulated. Simulation results of the a
wzc
, a
wϕc
, and CDL3 are shown in Figure 9(a)–9(c), respectively. (a) Cabin’s vertical acceleration, (b) cabin’s pitch acceleration and (c) CDL3 at 3rd wheel axle under various road surfaces.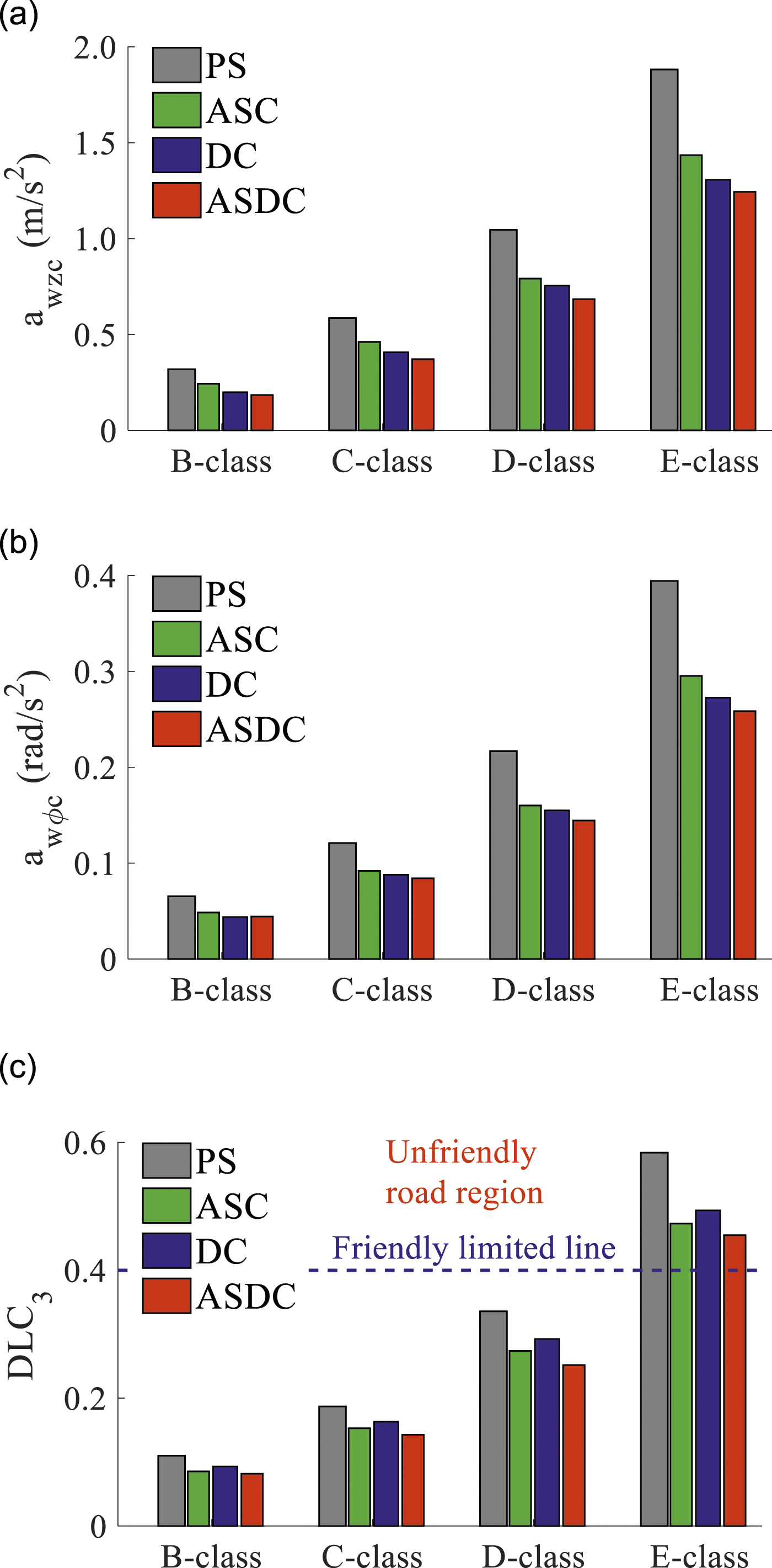
From Figure 9, we see that both the riding quality and friendliness-road surface of heavy vehicle with the PS, ASC, DC, and ASDC are greatly influenced by the road surface’s height. All values of a wzc , a wϕc , and CDL3 are increased when the heavy vehicle is moving on the road from the B-class (good road) to E-class (very poor road). This means that the riding quality and friendliness-road surface of the vehicle are strongly reduced when the height of the road surface roughness is increased. Particularly, on the ISO E-class of the very poor road surface, the values of CDL2 and CDL3 are increased over 0.4. Thus, the contact between the second/third axles of the heavy vehicle and road surface has been broken and the road surface is strongly damaged.
With the heavy vehicle air suspensions controlled by the ASC, DC, and ASDC, the results in Figure 9 show that all values of the a wzc , a wϕc , and CDL3 are strongly decreased in comparison with PS under all various road surfaces, especially with the ASDC. Besides, both a wzc and a wϕc with the DC are also lower than that of the ASC (see Figure 9(a) and 9(b)) while CDL3 with the DC are also higher than that of the ASC (see Figure 9(c)) under all different road surfaces. This means that the control performance between the ASC, DC, and ASDC is also relatively stable under all various road surfaces of the vehicle moving.
Conclusions
The values of CDL2 and CDL3 at the second and third axle of the wheel are bigger than the values of CDL1, CDL4, and CDL5 at the first, fourth, and fifth axle of the wheel. Therefore, the second wheel and third wheel bigger impact the road surface.
The road surface roughness and vehilce’s moving speed greatly affect two indexes of the riding quality and friendliness-road surface. To ameliorate these indexes, the moving speeds from 20÷25 m/s should be used in the moving process of heavy vehicle. Besides, the roughness of the road surface of ISO E-class should be also repaired to ensure safe movement of the heavy vehicle.
With ASC, DC, and ASDC applied, all a wzc , a wϕc , and CDL n are strongly decreased in comparison with PS, especially with ASDC. Additionally, both a wzc and a wϕc of the DC are smaller than that of the ASC by 13.26% and 4.54% whereas the maximum CDL3 with the DC are higher than that of the ASC by 6.13%. Therefore, in order to ameliorate the riding quality of the heavy vehicle, the control method of DC should be applied. To enhance the friendliness-road surface, the control method of ASC should be applied. In order to improve both riding quality and friendliness-road surface, the control method of the ASDC should be applied for the heavy vehicle’s air suspensions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.