
Abstract
In order to solve the problem of unsatisfactory control effect caused by uncertain parameters in the fuzzy skyhook control method, a fuzzy skyhook control strategy optimized by particle swarm strategy is proposed. The magnetorheological (MR) damper is put on the bench for mechanical characteristics experiment, and the forward model of MR damper is established. The adaptive network fuzzy inference system (ANFIS) system in simulation software is used to build its inverse model to verify the accuracy of the forward model of MR damper. A quarter vehicle suspension model is established, and a fuzzy skyhook control strategy based on particle swarm optimization is designed. Numerical simulations are carried out under the excitation of random road. The acceleration, suspension dynamic deflection and tire dynamic load are used to evaluate its performance. Compared with the passive control, the root mean square (RMS) values of the acceleration for the fuzzy skyhook control strategy are improved by 41.9% and 37.6%, the RMS values of the suspension dynamic deflection for the fuzzy skyhook control strategy are improved by 53.3% and 48.0%, and the RMS values of the tire dynamic load for the fuzzy skyhook control strategy are improved by 17.6% and 14.5% under the B-Class and C-Class road excitations. The simulations and experimental results verify the effectiveness of the controller.
Keywords
Introduction
The suspension system is composed of springs and dampers, which can carry the automobile body mass and improve the ride comfort. 1 From the perspective of suspension implementation form, suspension can be divided into passive suspension, semi-active suspension (SAS) and active suspension. The SAS takes into account the stability of the passive suspension and the adaptive ability of the active suspension. It can not only achieve the similar damping effect as the active suspension, but also do not need too much energy consumption. In SAS, MR fluid damper, which takes MR fluid as damping medium, has the advantages of small volume, low energy consumption and fast response speed. Consequently, it has attracted extensive attention of researchers.
MR fluid is a new material mainly composed of carrier fluid, soft magnetic particles and stabilizer. Without an external magnetic field, MR fluid is a Newtonian fluid that can flow freely. When an external magnetic field is applied, the magnetic particles in the MRF form a chain structure under the action of the magnetic field. Iit can transform from free flowing Newtonian fluid to Bingham plastic fluid in a few milliseconds. With the increase of the applied magnetic field strength, the chain structure will further fuse. When the magnetic field disappears, the magnetorheological suspension changes back to Newtonian fluid within a few milliseconds, and the transition between the two phases is reversible. Therefore, the effective control of MR damper mainly depends on the understanding of its nonlinear hysteretic characteristics under the action of external magnetic field. Sun, SS proposed an innovative seat suspension working with a rotary MR fluid damper. Compared with a traditional linear MR damper, it possesses several advantages such as usage reduction of MR fluid, low sealing requirements and lower costs. Fuzzy logic was chosen to control the rotary MR damper in real time and two different vibration excitations. The experimental results show that it under fuzzy logic control was effective in reducing the vibrations. Due to the vehicle’'s chassis becomes lowered in the unmanned vehicles or purposed-based vehicles, traditional linear MR dampers were found inadequate in ensuring sufficient vibration control. Park, YJ proposed a rotary type of MR damper . The proposed damper was designed based on prespecified design parameters through mathematical modeling and magnetic field analyses and effectiveness was shown through experimental investigations.
In recent years, many researchers have carried out a lot of researches on the control strategy of MR-SAS. For example, Early 1970s. American Scholar Karnopp For the first time, a control idea for a semi-active suspension has been proposed, And a closed-loop skyhook control algorithm was proposed, which was the original semi-active suspension control method. The control objective was a single ride comfort, and the skyhook control simulates a virtual damper between the sprung mass and the fixed plane. Hemanth K used the skyhook control strategy to analyze the semi-active control performance, and simulated the passive and SAS systems at different speeds on random road excitations. The simulated results show that the ride comfort and grip are significantly improved compared with the passive suspension system. Hsiehc-y proposed an electromechanical suspension system with energy regeneration and semi-active control capability, which overcomes the trade-off between the energy consumption and ride comfort in the SAS system. Using the implemented circuit, the regenerative skyhook control strategy was used to provide continuous variable damping force, so as to significantly improve the vibration isolation effect. Skyhook control is a classical control method, and the control strategy is simple and easy to implement. Skyhook control assumes that the sprung mass is connected with the ideal skyhook through virtual damping, so as to achieve the purpose of reducing vehicle body vibration. Seunghoon woo proposed a double skyhook algorithm for controlling the SAS system to improve the road holding performance of the wheel motor. The algorithm improved the dynamic stability of the automobile and shorted the suspension dynamic deflection. Compared with passive control and traditional skyhook control, double skyhook dampers had better ride comfort. Liu proposed a control strategy of SAS system based on improved skyhook control of adaptive fish swarm algorithm, and carried out simulation verification. The results showed that the SAS with improved skyhook control strategy had better robustness. Jack nn. potter studied the general form of semi-active switching control and compared it with the skyhook semi-active controller. In order to determine the optimal performance of semi-active switching control in terms of displacement transmissibility, a switching time controller was proposed and analyzed. Nagamatsu S proposed a control strategy that traditional skyhook-based on-off control switches the damping force on a vibration suppression target according to the sign of the product of the target and relative velocities (which was called the condition function),the proposed control strategy can offer high-performance semi-active vibration suppression, even in the presence of force delays in the damper. Ren,H-B proposed an adaptive hybrid control algorithm . The virtues of sky-hook is combined with ground-hook control strategies and a more suitable compromise for the suspension systems was chosen. Damping continuous adjustable absorber was used to continuously control the damping force so as to eliminate the damping force jerk instead of traditional on-off control policy. The simulation results indicate that the hybrid control algorithm could offer a good coordination between ride comfort and handling of the vehicle. Although the skyhook control can effectively suppress the vibration of the vehicle body, the damping force of the controller was applied to the vehicle body at the same time, it also exerts a reaction force on the wheels, resulting in the poor grounding performance of the wheels. Therefore, the control strategy of combining fuzzy control and skyhook control is introduced to solve this problem.
Among many fuzzy skyhook control strategies, Rui L proposed a fuzzy skyhook control strategy for vehicle body vibration. The skyhook control is suitable for reducing the vertical vibration of the vehicle body, but the vertical motion, roll and pitch of the vehicle body were coupled. A fuzzy control strategy was developed to adjust the skyhook damping force. MW trikande proposed a semi-active control strategy based on skyhook and fuzzy logic to isolate the spring mass movement of 8 × x8 military vehicles, provide ride quality, grip and firing accuracy for the platform, and eliminate the passive constraints of the SAS system. The effectiveness of the skyhook and fuzzy logic controller is evaluated through experimental setup. Some parameters in the fuzzy skyhook control are obtained based on experience, which have a certain impact on the control performance. Therefore, the optimization algorithm is introduced to optimize the control parameters to solve this problem. Pang, H proposed a novel variable universe fuzzy control design for vehicle semi-active suspension system with MR damper through the combination of fuzzy neural network (FNN) and particle swarm optimization (PSO). Lastly, a simulation investigation is provided to validate the proposed control scheme. The results of this study can provide the technical foundation for the development of vehicle semi-active suspension system.
Among the fuzzy skyhook control strategies optimized by many optimization algorithms. Cho J Proposed the fuzzy skyhook control strategy of SAS system, adjusted the scale factor and membership function with genetic algorithm, and compared it with the continuous skyhook control. The simulation results showed that the optimized skyhook control was more effective than the continuous skyhook control in improving the suspension performance. Mat 19 Proposed a new neural network inverse model of MR damper and designed a fuzzy skyhook controller based on gray wolf optimization algorithm to control the vibration of SAS. The simulated results showed that the optimized fuzzy skyhook control method can improve the performance of suspension. Therefore, aiming at the advantages of particle swarm optimization algorithm such as simple principle and strong global optimization ability,, this paper proposes a fuzzy skyhook control strategy optimized by particle swarm strategy.
The research ideas of this paper are as follows: because the MR damper uses semi-active control algorithm, and its damping force output is determined by the input current, the mathematical model of the MR damper is built by using parameters identification and linear fitting based on the data measured in the bench test, and the simulated data is compared with the experimental data to verify the accuracy of the model. Because of the complexity of the dynamic model of MR damper, the inverse model cannot be directly established, so the fuzzy neural network is used to establish the inverse model. The selection of key parameters Ka, Kv and Ku in fuzzy skyhook control is based on experience, which can not achieve the best control effect. Therefore, the fitness function is established, and the global search ability of particle swarm optimization is used to find the optimal parameters, so as to obtain better suspension performance. The remaining parts are arranged as follows: the third part is the description of the model of a quarter vehicle MR-SAS system. The fourth part is the design of fuzzy skyhook controller and the process of particle swarm optimization; In the fifth part, the effectiveness of the optimized fuzzy skyhook control strategy is verified by comparing the passive control with the traditional skyhook control through the simulations in time domain and frequency domain; The sixth part draws the conclusions.
Dynamic model of MR damper
Mechanical test of MR damper
The structural composition of MR damper is shown in Figure 1. Structural diagram of MR damper.
In order to obtain the damping characteristics of the MR damper, the MR damper is installed on the PWS-20 bench for mechanical property test, as shown in Figure 2. The sinusoidal excitation is used to test the tension of the MR damper, and the frequency and amplitude of the excitation are set to make the MR damper move back and forth under the action of the bench. The input current of the MR damper is controlled by the numerical control constant voltage and constant current power supply. In this test, the excitation amplitude is selected as 35 mm, the frequency is selected as 0.25 Hz, and the current input is 0, 0.2, 0.4, 0.6, 0.8 and 1A respectively. Bench test process.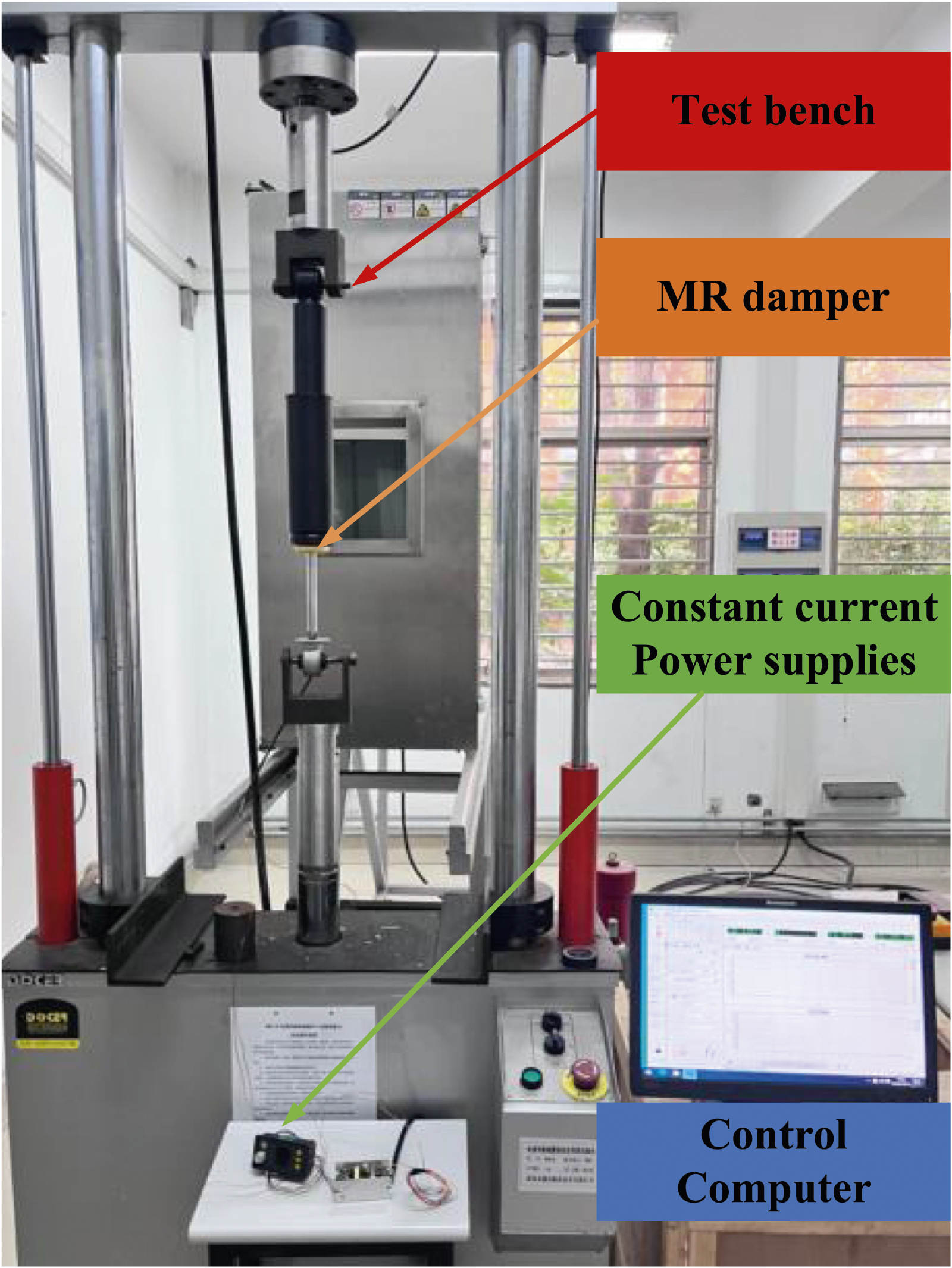
Forward model of MR damper
In order to make full use of the semi-active characteristics of MR damper, it is necessary to establish an accurate dynamic model to achieve semi-active control. The Dahl model is selected for the MR damper, as shown in Figure 3. The model consists of the following two equations
21
: Dahl model of MR damper.

Due to the relationship between Dahl model and current, the model has five unknown parameters,
The parameter identification process: (1) Dahl model of MR damper was built in simulation software. (2) Import the test data, and import the sinusoidal excitation test data of the 35 mm, 0.25 Hz shown in Figure 2. Under different current conditions into the simulink model. The input of the model is displacement and velocity, and the output is damping force. (3) Select the parameters to be identified, set an initial value, and then start identification.
Parameter identification results.
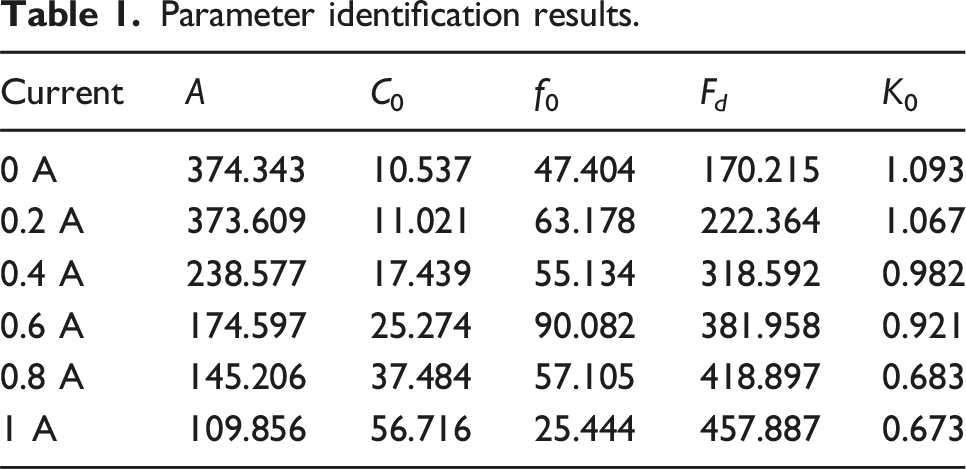
It can be seen from the identification results that the values of parameters
The fitting function:
The other two parameters
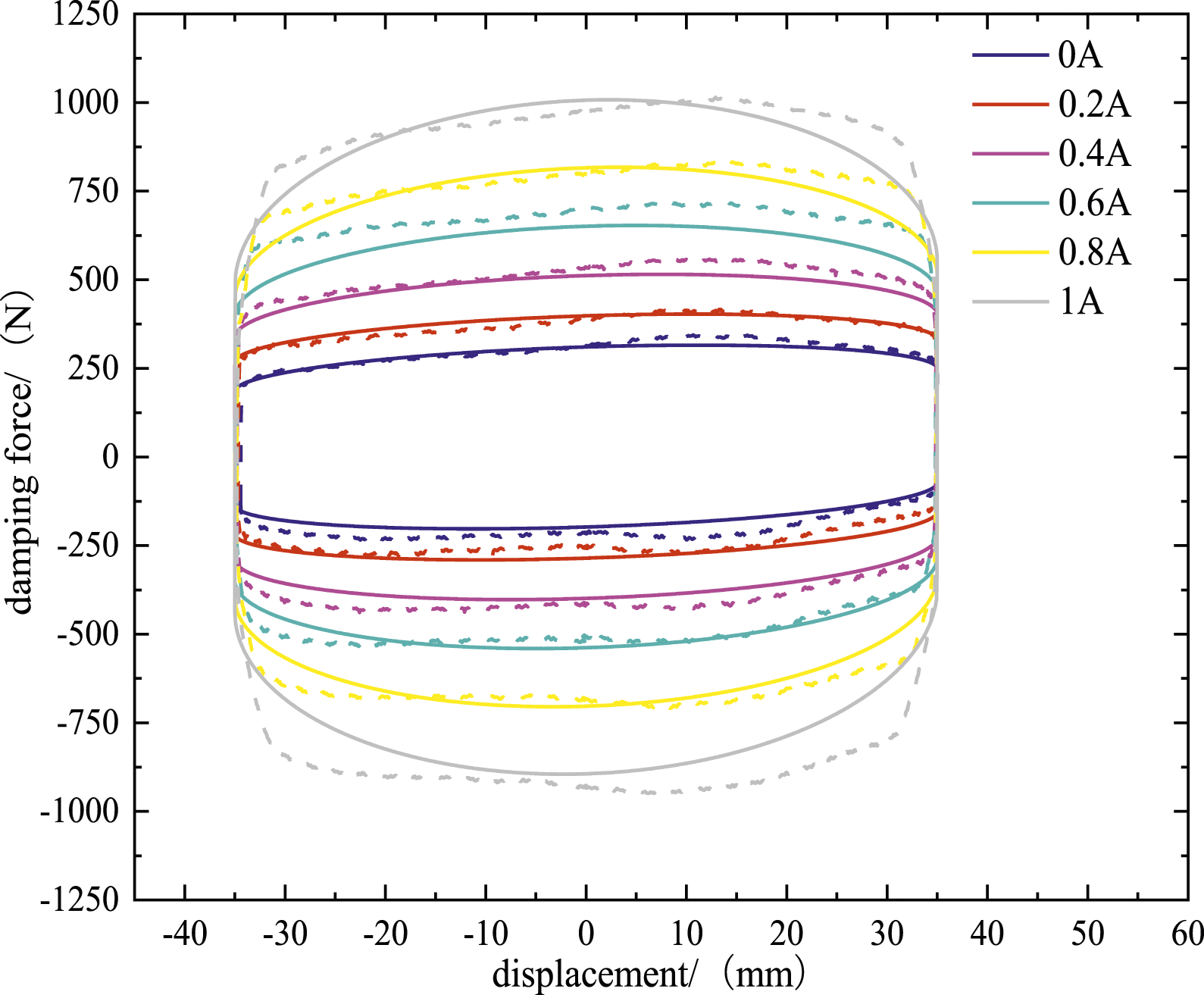
The same colored lines in Figures 4 and 5 represent the damping force-velocity and damping force-displacement curves under the same current. The solid lines are simulations and the dotted line are experiments. It can be seen from the figure that the simulated curve is basically consistent with the experimental curve, which proves that the Dahl MR damper model is more accurate. Damping force-velocity curve. Damping force-displacement curve.
Inverse model of MR damper
In the semi-active control, the expected damping force can be calculated by the controller, and the actual damping force can be output by the MR damper. At this time, the size of the magnetic field needs to be changed by the size of the current, so as to change the size of the output damping force. Therefore, the inverse model of MR damper is built to calculate the control current according to the expected damping force.
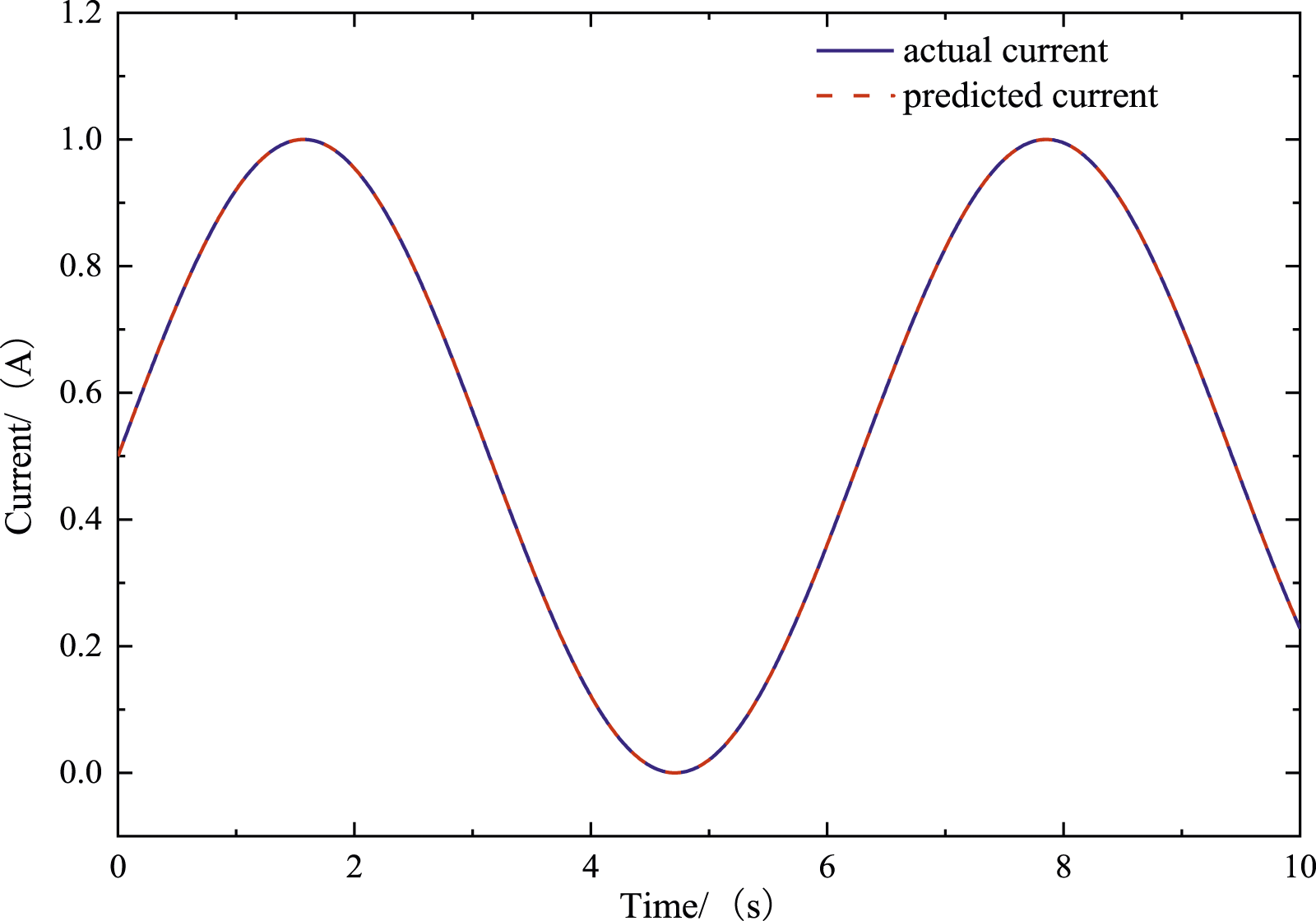
Because the relationship between the output damping force and current of MR damper is complex, the mathematical expression between them cannot be established directly, so the fuzzy neural network toolbox is used to establish the relationship between them. The input current signal is selected as sinusoidal or random white noise signal, the training data inputs are time, displacement, velocity and damping force, and the output is current. Compared the predicted current with the actual current curve, as shown in Figures 6 and 7. The predicted current is basically consistent with the actual current curve, indicating that the fuzzy neural network inverse model has good performance. Comparison curve between predicted current and actual current. Comparison curve between predicted current and actual current.
Suspension model
Semi-active model of quarter suspension
The dynamic model of a two-degree-of-freedom 1/4 MR SAS system is shown in Figure 8. Schematic diagram of a two degree of freedom 1/4 MR suspension model.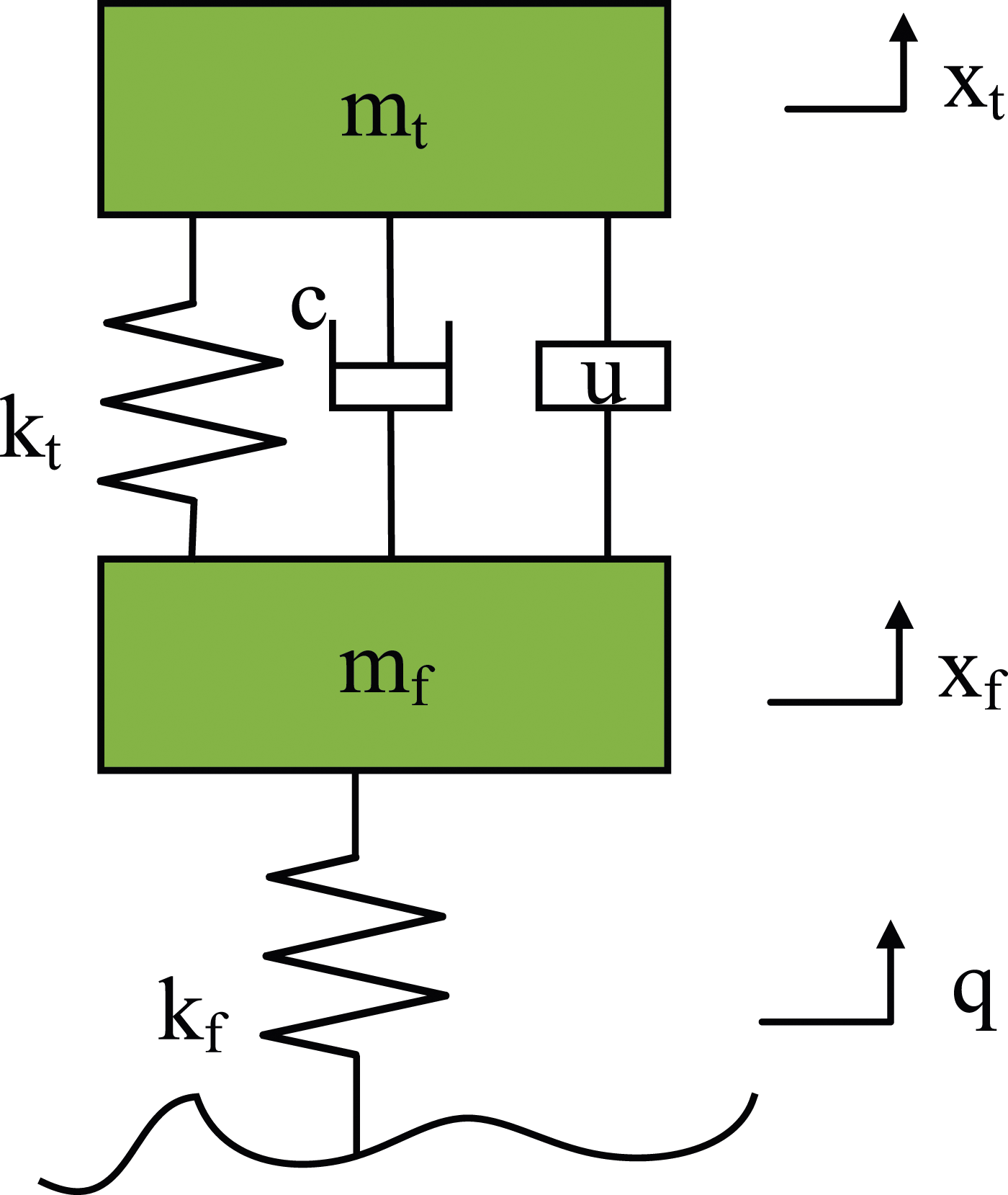
The dynamic equation of the SAS system:
Its state variable and output variable
22
:

The state matrix A, input matrix B, output matrix C and transfer matrix D:

Road excitation modeling and simulation
In this paper, the filtered white noise is used as the random road input excitation, and its time domain mathematical model
23
is expressed:
The sampling time is selected as 0.001s under the condition of B-Class road excitation and vehicle speed of 20 m/s. The simulated results of B-Class road input excitation are shown in Figure 9. Road excitation of B-class road and 30 m/s.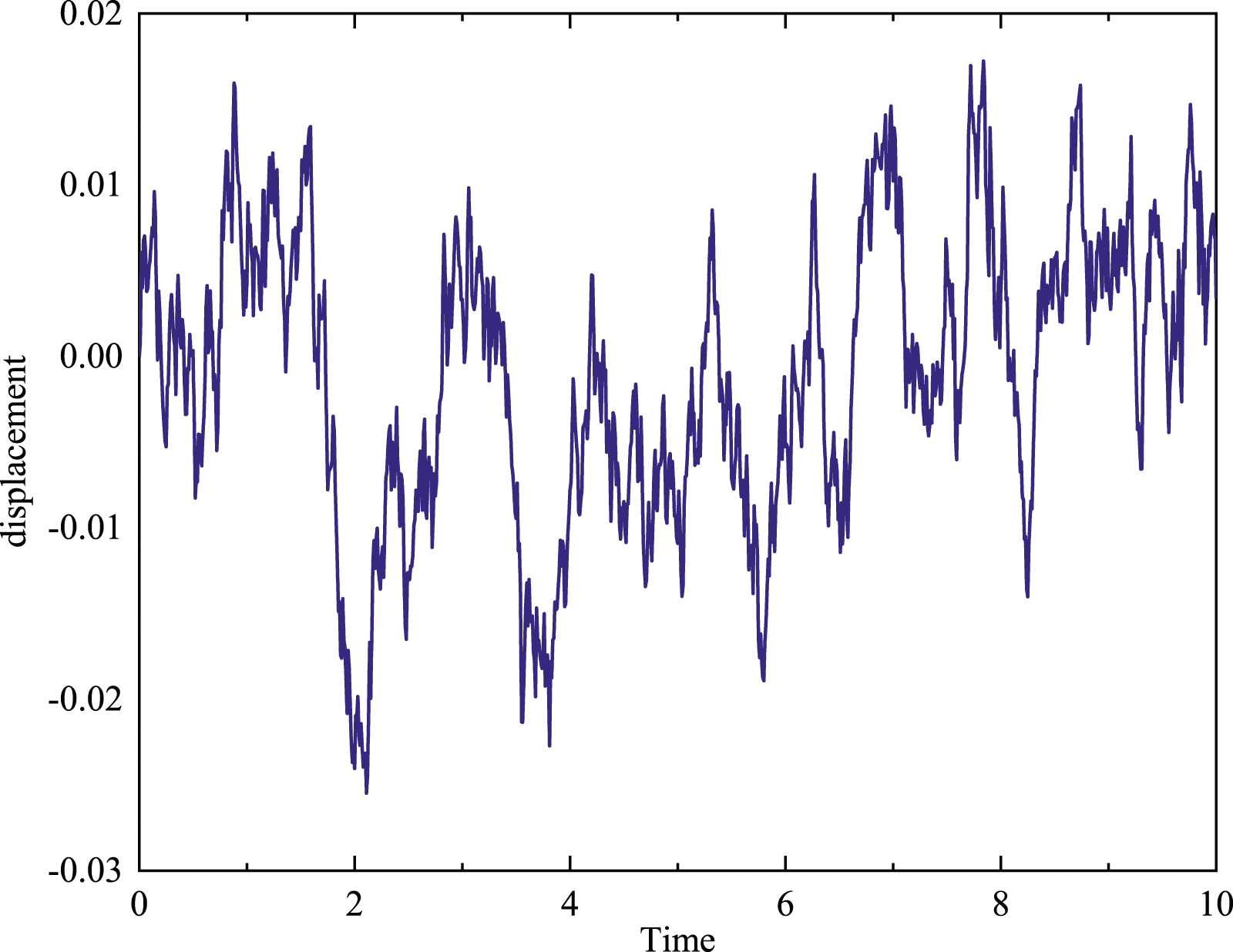
The sampling time is selected as 0.001s under the condition of C-Class road excitation and vehicle speed of 30 m/s. The simulation results of C-Class road input excitation are shown in Figure 10. Road excitation of C-class road and 30 m/s.
Controller design
Fuzzy skyhook controller
The idea of skyhook control is to install a skyhook damper between the car body and the imaginary skyhook. Because the actual vehicle cannot implement this ideal control force. Therefore, by measuring the vertical movement speed between the body and suspension, the semi-active control of the switch “on-off” is used.
The traditional skyhook control only considers the speed of the sprung mass, but does not consider the acceleration of the sprung mass. Therefore, this paper proposes a fuzzy skyhook control strategy applied to the SAS system, introduces the acceleration into the fuzzy rules, and uses the appropriate fuzzy logic to describe the skyhook control algorithm Figures 11 and 12. Schematic diagram of adding acceleration to fuzzy rules Schematic diagram of fuzzy skyhook control based on particle swarm optimization.

The switching law of fuzzy skyhook control
18
:
Fuzzy rules.

The control rules and reasoning mechanism of the designed fuzzy controller are not adjustable, but the quantization factors Ka, Kv and scale factor Ku are adjustable, which has a significant impact on the performance of the controller. However, the selection of parameters for scale factor and quantitative factor based on experience has limitations, and it needs to adjust the parameters repeatedly to achieve better control effect. Therefore, the optimization algorithm can be used to find the optimal quantitative factor and proportional factor, so as to obtain the optimal control effect. In this paper, particle swarm optimization algorithm is used to optimize the quantization factor and scale factor to achieve the best control effect.
Objective function
The suspension vertical acceleration, suspension dynamic deflection and tire dynamic displacement are the key evaluation indexes to reflect the suspension performance. There is a linear correlation between dynamic tire displacement (DTD) and dynamic tire load (DTL). DTD*k f = DTL,Because k f is a constant value, On the premise of ensuring optimization accuracy, the calculation pressure is reduced, the optimization time is reduced, and the efficiency of optimization is improved, so DTD is chosen as the objective function.
The fitness function of particle swarm optimization:
Constraint conditions as follows:
Particle swarm optimization
Particle swarm optimization (PSO) is derived from the predation behavior of birds. The algorithm sets multiple particles, each particle is a parameter that needs to be optimized, and each particle shares location information, that is, using the current objective function to determine that the particle is close to the optimal solution. In the process of approximation, when other particles are closer to the position of the optimal solution than the previous particles, the position of the particle closest to the optimal solution is updated and moves towards a better target. The core of the algorithm is to iterate through continuous learning until the real optimal solution is reached.
Based on the powerful global optimization ability of PSO algorithm, after establishing the fitness function, search to find the potential solution of the parameter, and solve the continuous nonlinear problem,
25
the optimization process: (1) Initialize the particle swarm, the particle swarm size is 100, the inertia factor is 0.6, and each particle obtains the initial position and velocity. Determine the optimal location (2) Assign each particle in the particle swarm to Ka, Kv and Ku to be optimized in turn. (3) Calculate the fitness of each particle and the global optimal fitness value. (4) Compare the fitness function value after particle calculation with the particle optimal position (5) Judge whether it meets the preset maximum number of iterations of 50 generations and the exit algorithm to obtain the optimal Ka, Kv and Ku. Otherwise, return to step 3 for the next iteration to update the particle speed and position. Until the conditions are met, the optimal value is found Figure 13. PSO schematic diagram.

The update formula of the speed and displacement of particle swarm optimization algorithm:
Results of optimized parameters.

Simulation result
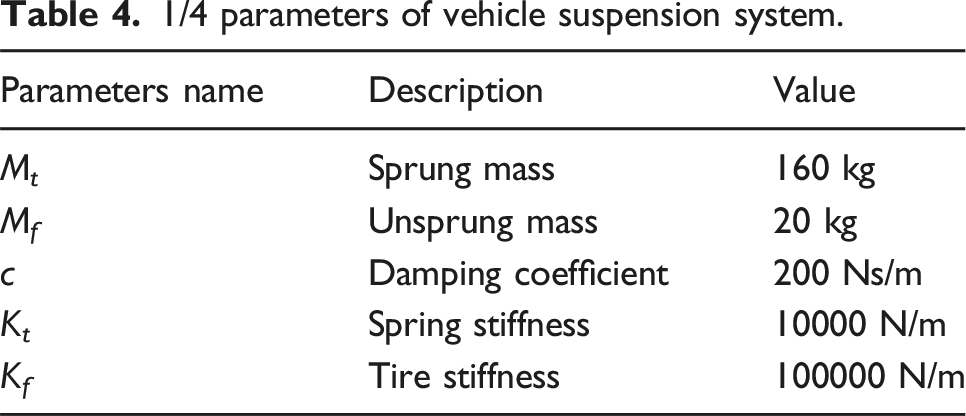
1/4 parameters of vehicle suspension system.
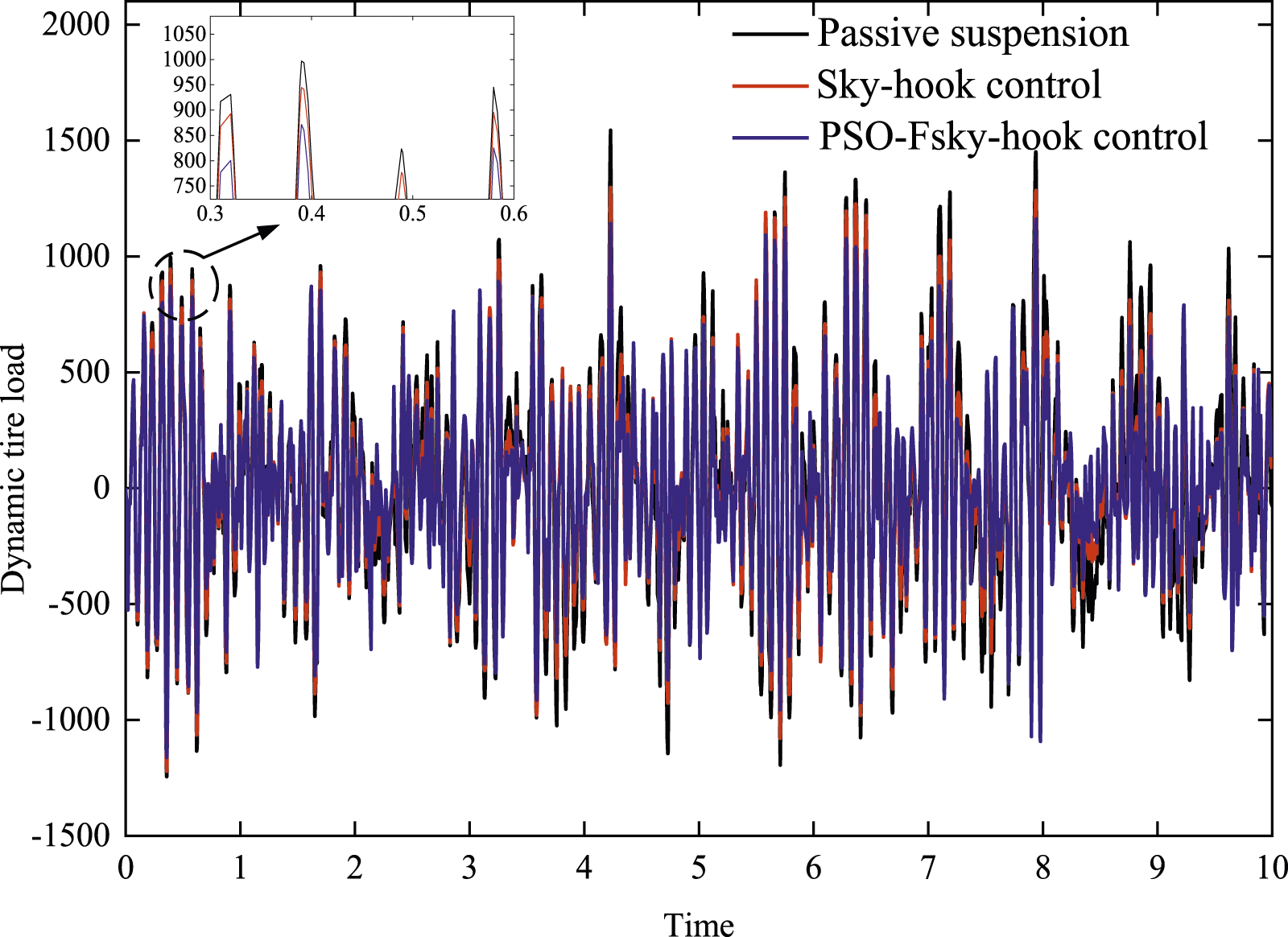
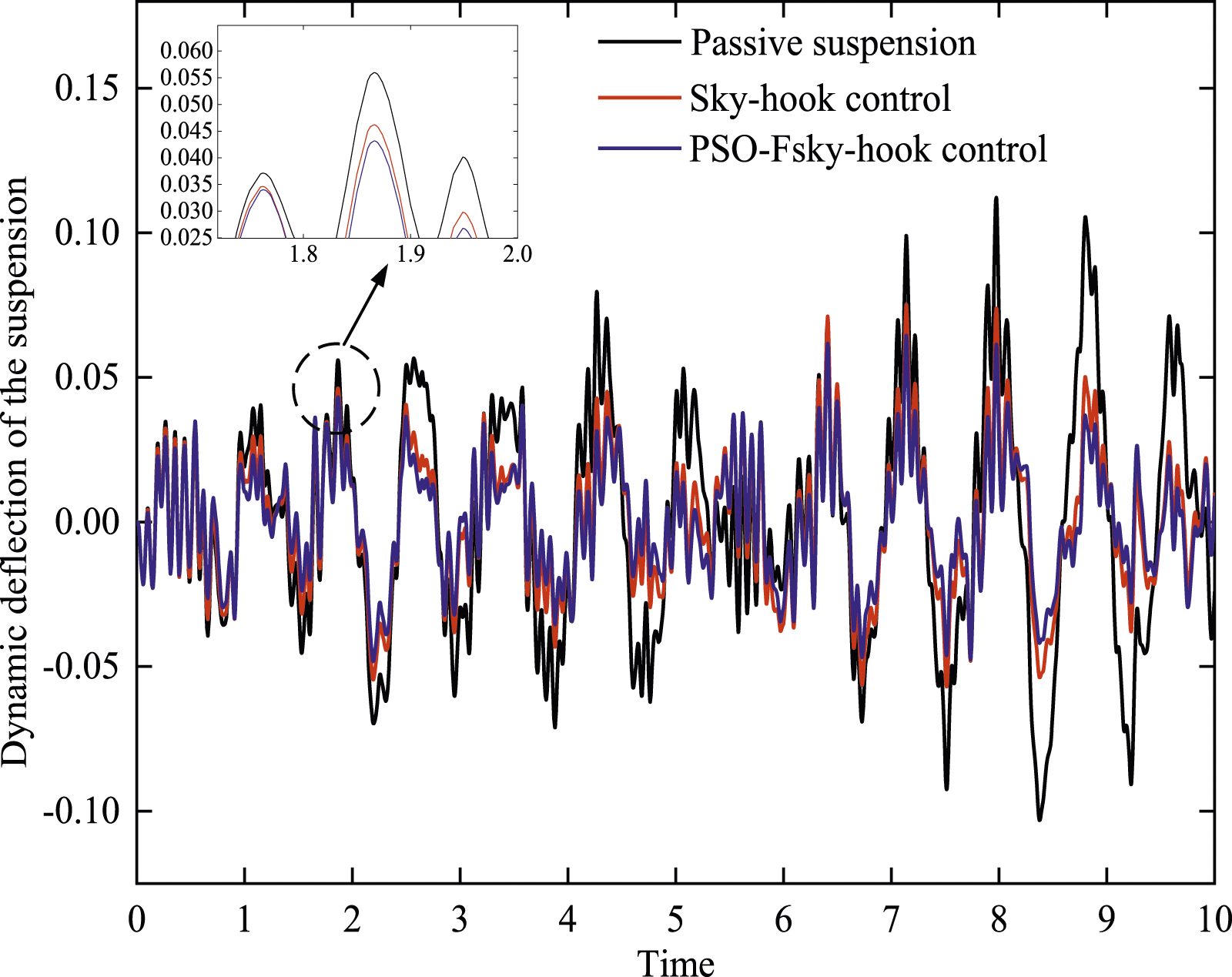
In order to verify the control performance of fuzzy skyhook controller based on PSO, the passive control, skyhook control and fuzzy skyhook control based on PSO are simulated and analyzed in time domain and frequency domain respectively. Vertical acceleration, suspension dynamic deflection and tire dynamic load are selected as evaluation indexes, which show the ride comfort and handling stability of the SAS. The simulated results are shown in Figures 14–25. Acceleration. Suspension dynamic deflection. Tire dynamic load Acceleration. Suspension dynamic deflection. Tire dynamic load. Acceleration. Suspension dynamic deflection. Tire dynamic load. Acceleration. Suspension dynamic deflection. Tire dynamic load.









Time domain analysis
Operation condition 1: B-Class road and 20 m/s
Operation condition 2: C-Class road and 30 m/s.
RMS value of B-Class road.

RMS value of C-Class road.

RMS value of different control strategies under B-Class road.

RMS value of different control strategies under C-Class road.

Frequency domain analysis
Operation condition 1: B-Class road and 20m/s
Operation condition 2: C-Class road and 30m/s
Figures 20–25 describes the fuzzy skyhook optimized by PSO under the B-Class and C-Class road excitations, the power spectral density values of acceleration, suspension dynamic deflection and tire dynamic load are significantly reduced. The simulated results show that the controller improves the ride comfort and handling stability of the SAS system.
Conclusion
In this paper, a fuzzy skyhook control strategy based on PSO is proposed for MR-SAS system. (1) The parameters of MR damper were identified by bench test, and the forward model and inverse model were built. The simulated results show that the simulated data are basically consistent with the experimental data, and the forward model and inverse model are more accurate. (2) The fuzzy skyhook control strategy, which combines the skyhook control method with the fuzzy control method, can make up for the lack of considering acceleration in the skyhook control, so as to achieve better control effect. The selection of parameters based on experience has limitations, and it needs to be adjusted repeatedly to achieve better control effect. Therefore, the PSO algorithm is used to optimize the fuzzy skyhook control strategy. (3) Compared with the passive control and skyhook control, under the B-Class and C-Class road excitations, RMS values of the acceleration, suspension dynamic deflection and tire dynamic load for the PSO fuzzy skyhook control are improved by 41.9%, 53.3% and 17.6% on the B-Class road respectively; RMS values of the acceleration, suspension dynamic deflection and tire dynamic load for the PSO fuzzy skyhook control are improved by 37.6%, 48.0% and 14.5% on the C-Class road respectively. The simulated results show that the controller improves the tire’s road holding ability of the MR-SAS system.
Footnotes
Declaration of conflicting interests
The authors declared that there are no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (NSFC) (Ref. 52102443).