
Abstract
This study proposes an input shaping scheme for a firefighter helicopter carrying a water bucket suspended by a cable. A three-degree-freedom model is used to study the dynamics of the system and to reduce the sway motion of the water bucket. Different cases were considered to investigate the water bucket swing action, and the kinematic stability of the helicopter during the takeoff. Input shaping method was adapted and implemented to provide fast takeoff maneuvers and attain the system’s desired final conditions. The system’s constraints and limitations were also considered during maneuvers. Different parameters of the system were examined including masses, cable lengths, and proposed input functions. Numerical simulations were conducted, and the results showed the proposed technique’s effectiveness in reducing the system’s swing effect. The numerical results were compared with the unoptimized behavior of the firefighter helicopters, and the effectiveness of the proposed method was verified.
Introduction
Helicopters are equipped with one or more motor-powered horizontal rotors that enable vertical takeoffs and landings, movement in any direction, and the ability to hover in place. These features make them particularly useful in firefighting operations.
Firefighters or water bombings are widely used on wildland fires. They may be fitted with a tank, or they may carry a water bucket that is considered as the payload of the helicopter suspended by cables. Their mission is to carry thousands of gallons of water via these tanks or buckets and strategically drop it at the desired destination with tolerable accuracy to put out fires. However, this process needs accuracy, volume, rapid deployment, and speed to carry massive amounts of water, fly fast, and drop it accurately at the targeted destination in a short period. On the other hand, firefighter helicopters might face intensive oscillations from the loaded water inside them or attached. The water bucket that is suspended from the helicopter by a cable, experiences oscillations due to the aerodynamic environment, mobility, and helicopter maneuvering. The attached bucket characterizes the effect of a significant heavy pendulum in motion. Also, the firefighter helicopter speed during takeoff, water evacuation, and landing maneuvering must be controlled to maintain the water bucket from unleashing because of the swing phenomenon. Slushing movement of the water in the bucket or inside the body of the helicopter is also a considerable issue. All these sources of oscillation reduce the stability of the helicopter, which then would lead to the failure of the firefighting operation. For these reasons, the thrust force and pitch angle of the helicopter rotor are shaped so that the helicopter delivers the water bucket to the desired destination with minimum oscillation in the shortest possible period.
Controlling a helicopter requires careful balancing of complex aerodynamics, ensuring vertical and horizontal movement, stability, and agility. Key methods include manipulating the kinematics, direction, altitude, and stability to ensure safety. Closed loop control methods are mostly used in such tasks. More advanced control methods and strategies can also be applied. However, pre-shaped inputs to the helicopters are also employable for simple and adequate oscillation control actions.
Flexible systems experience unwanted vibrations that cause a negative impact on positioning accuracy, fatigue, and safety. Thus, the vibration of these systems has been investigated many years ago up to today, to control the motion so that the structure’s residual vibration is near zero. Many researchers have explored solutions to this problem; among these approaches is input shaping, a feedforward technique. It is implemented by combining a desired system command with a series of impulses or inputs, to create a shaped input that is then utilized to control the system.1,2 The earliest work on input shaping was performed by Smith in 1957. 3 Smith’s technique, referred to as posicast control, involved delaying a portion of a baseline command before delivering it to the system. His method ensures there will be zero residual vibration when the system model is perfect, so it is commonly referred to as Zero Vibration.4,5
Singhose and colleagues (1994) used vector diagrams to illustrate a decrease in residual vibration. Their approach relies on the estimation of the system’s natural frequency and damping ratio, unlike the majority of prior input shaping solutions. 6 A common input shaping design problem was examined by Lim et al. (1999) who demonstrated how it may be reformulated as a convex optimization issue. They discussed a design problem for input shaping in terms of convex constraints and objective criteria. 7
In 2016, Alhazza introduced a method using command shaping to remove residual vibrations in multimode systems, featuring two main advantages: independence from resonant frequencies and no need for a complete system model. 8 Alghanim and colleagues (2018) developed a polynomial-based technique for high-accuracy crane maneuvers, including hoisting. This method shapes input commands to reduce jerks and delays, is adaptable to various smoothness levels, and allows customizable maneuver times. 9 Later, Jaafar and colleagues (2019) developed model reference command shaping to control vibrations in multimode systems without measuring frequency modes and damping ratios, applied to a double-pendulum crane. 10
The input shaping method was extended to be applied in several different systems. Bisgaard et al. (2008) presented a control system that feedforward reduces the swing for augmenting helicopter controllers. Their feedforward controller was designed to shape the reference trajectory using input shaping to avoid excitation of the system’s damped modes. 11 Singhose (2009) presented a new class of zero overtravel input shapers that are designed to reduce shaper-induced overtravel from human operator commands. 12
Later, Potter and colleagues (2011) studied the simulation of a helicopter and sling-load system’s behavior in response to lateral control inputs. Their study showed a great reduction in residual swing amplitude with a minor increase in maneuver time. 13 Sadr (2014) proposed an anti-swing control algorithm for a quadrotor with a swing load. Their feed-forward control algorithm reduced the swing’s oscillation by the input shaping theory. 14 In 2016, Kang et al. developed a controller for unmanned aerial vehicles to precisely transport and place slung loads. It features a target position tracker, load oscillation controller, and an adaptive neural network that adjusts to flight environment uncertainties, effectively suppressing load oscillations. 15
One year later, Nair and colleagues (2017) proposed an H-infinity controller for a helicopter-slung load system in hovering conditions. Their control was designed to stabilize the helicopter in the presence of oscillations. 16 In 2018, Afzal and Malik developed a linear matrix inequality-based sliding mode control to stabilize the payload of the unmanned helicopter. Wind gusts were added to their system for more control. 17 Zhang et al. (2018) proposed a combined controller, which is a model-following controller along with the command smoother, to control the helicopter’s attitude, load swing, and load twisting. 18
Ren and colleagues (2020) proposed a motion trajectory tracking control scheme in the presence of input constraints and external disturbances for a model of a helicopter slung-load system. 19 Zhou (2022) simulated water dump distribution from firefighting helicopters’ belly tanks, focusing on tank altitude and wind speed. They found that higher forward flight speeds and wind speeds during hovering result in less water depth on the ground. 20 In 2022, Wang et al. designed a hybrid vibration controller composed of a feed-forward compensation module and a PD feedback control to control the vibration of a hovering helicopter mounted on a crane beam. 21 Recently, Li (2023) developed an anti-disturbance control method for six-degree-of-freedom unmanned helicopters using input-output feedback linearization. This method transforms complex systems for easier control and combines multiple control technologies, ensuring constrained tracking errors through Lyapunov stability theory. 22
The modeling of a firefighter helicopter has been explored in various research studies, with the complexity of the models varying based on the specific aspects under investigation. These studies have considered factors such as the dynamics of rotary components, structural vibrations, and the helicopter’s motion, including both translational and rotational coordinates. Additionally, other critical aspects, such as aerodynamic interactions, external disturbances, and load suspension dynamics, have been incorporated depending on the study’s objectives.
This study explores the application of input shaping to firefighter helicopters carrying large water buckets during takeoff, starting from rest, with the goal of optimizing the helicopter’s kinematics, reducing takeoff maneuver time, and minimizing residual oscillations by the end of the takeoff phase. A simplified three-degree-of-freedom model was developed to analyze the swing dynamics of the water bucket and control its translational motion by adjusting the helicopter’s thrust force and upper rotor pitch angle. Smooth polynomial input functions are implemented while accounting for system constraints and limitations to enhance system response. The performance of shaped input responses was compared with unshaped inputs, evaluating the effects of various system and input parameters on the overall system behavior.
Modeling
The models of firefighter helicopters vary in complexity. The model presented in this work focuses on the swing of the water bucket and its impact on the helicopter’s kinematics. A schematic diagram of the helicopter and water bucket is shown in Figure 1. A helicopter-water-bucket system, is represented by lumped masses, Firefighter helicopter model.
The takeoff stage is when the helicopter starts taking off and elevating the water bucket from the ground level and proceeding to the cruising stage. This stage has certain predefined initial conditions and certain desired final conditions to be attained. Upon completion of this stage, the system moves into the cruising stage, making stability essential. Hence, strict constraints and desired final conditions should be provided.
The position of the bucket at any given moment is given by,





The virtual work on the system by the thrust force is,










The term
The governing equations are nonlinear and coupled. Therefore, a proposed strategy will be implemented to handle the system’s equations. Two appropriate and well-tailored kinematic functions, of two generalized coordinates, which satisfy the initial and final conditions will be introduced in equation (9c). Subsequently, the solution of the third function, corresponding to the third generalized coordinate, will be determined numerically. Thenceforth, substituting these functions into equation (9a), and (9b) to obtain the thrust force



Two different takeoff cases are examined; the referenced case and the shaped input case. The reference case is a primitive case in which the masses of the system are assumed combined in a single mass, thus, the swing action is ignored, and the kinematic functions become simple. Alternatively, the shaped input case considers separate masses of the helicopter and the bucket, and it considers the significant effect of the swing motion of the bucket.
Reference case
The reference case is the primitive and straightforward case used to compare with. It neglects the effect of the swing motion of the bucket and assumes that the system consists of one single lumped mass and needs to move from its initial conditions to its desired final conditions in the easiest way using the simplest functions. It directly deals with the horizontal and vertical motion of the helicopter to transfer the system to the desired final conditions. It assumes that the system can stably reach its final conditions by considering the


The time derivatives of the proposed functions are,


The acceleration functions are,




Shaped input case
This case is of an enhanced level of performance. It takes into account the effect of the swing action between the two separate masses of the helicopter and bucket. However, since the primary purpose of helicopters is rapid elevation, vertical motion takes priority over horizontal motion. Additionally, as the swing angle is a critical concern in the system, the coordinates
The introduced functions of


The elevation function




The helicopter horizontal acceleration function is obtained from equation (9c),

Substituting equations (18b), (19b), and (20b) into equation (21) yields the horizontal acceleration of the helicopter. Due to the complexity of the resulting equation, the helicopter’s horizontal velocity and displacement are then calculated through numerical integration,
However, equation (22) does not ensure the condition of final speed specified in equation (12a), therefore, by adjusting the takeoff time and accounting for an appropriate final speed tolerance, the problem may be solved. Yet,
A new non-dimensional parameter, Mass Ratio

It refers to the ratio between the total mass of the bucket and water to the helicopter mass.
Results
The mathematical analysis is verified through numerical simulations, exploring different masses, system parameters, and takeoff strategies. A helicopter mass of 6000 kg, bucket mass of 100 kg, and constant values
Figures 2–5 depict the helicopter’s response to the referenced (R) and shaped (S) inputs, considering a cable length of 10 m and various mass ratios. The figures illustrate both takeoff and post-takeoff responses. Vertical dashed lines mark the end of takeoff, determined by the minimal time meeting system conditions and constraints. The shaped input maintains a consistent takeoff time as it is designed to smoothly achieve the desired final conditions. Helicopter horizontal displacement and velocity versus time for different mass ratios of referenced (R) and shaped (S) inputs. Helicopter vertical displacement and velocity versus time for different mass ratios of referenced (R) and shaped (S) inputs. Bucket angle and pitch angle versus time for different mass ratios of referenced (R) and shaped (S) inputs. Force ratio and cable tension versus time for different mass ratios of referenced (R) and shaped (S) inputs.
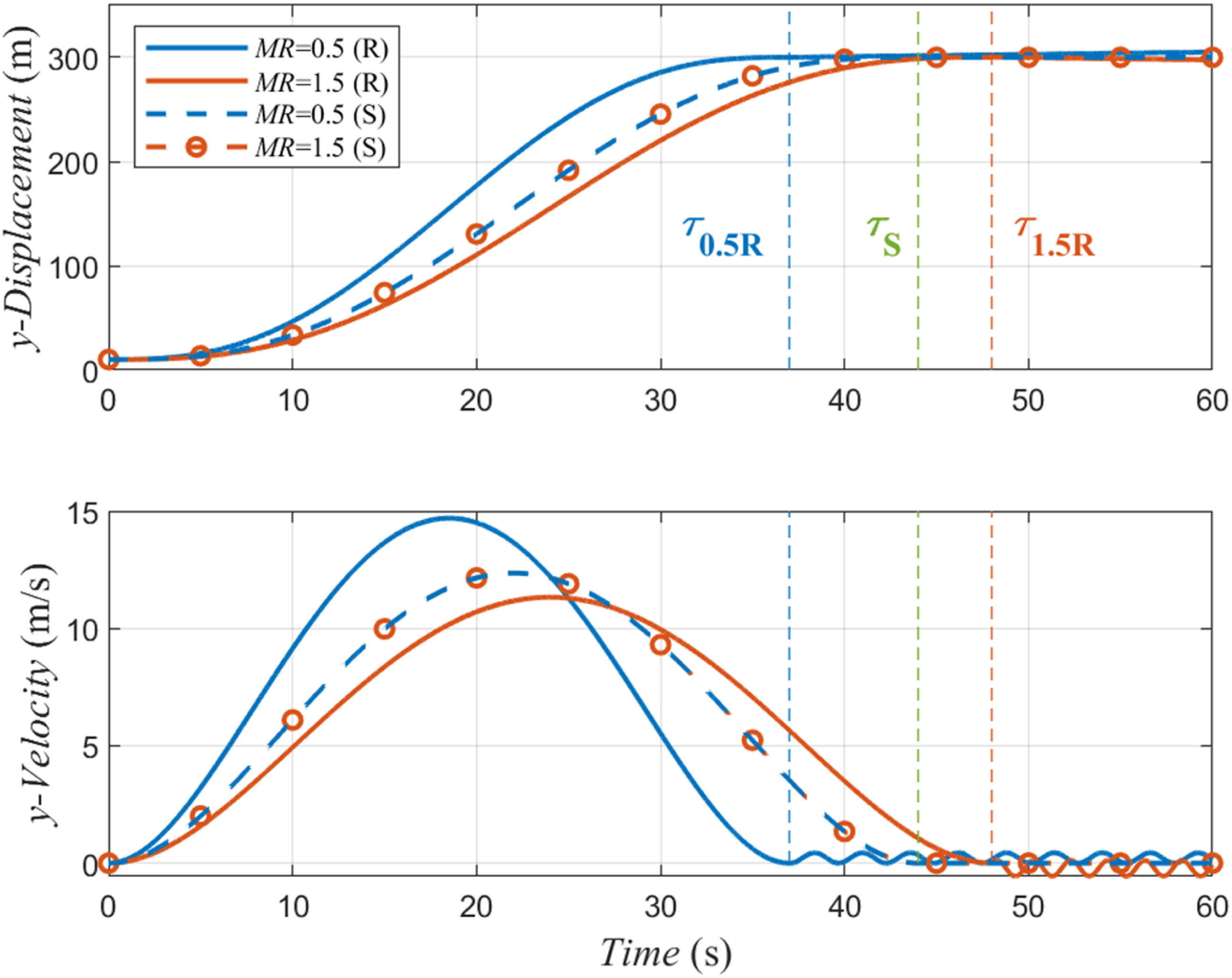

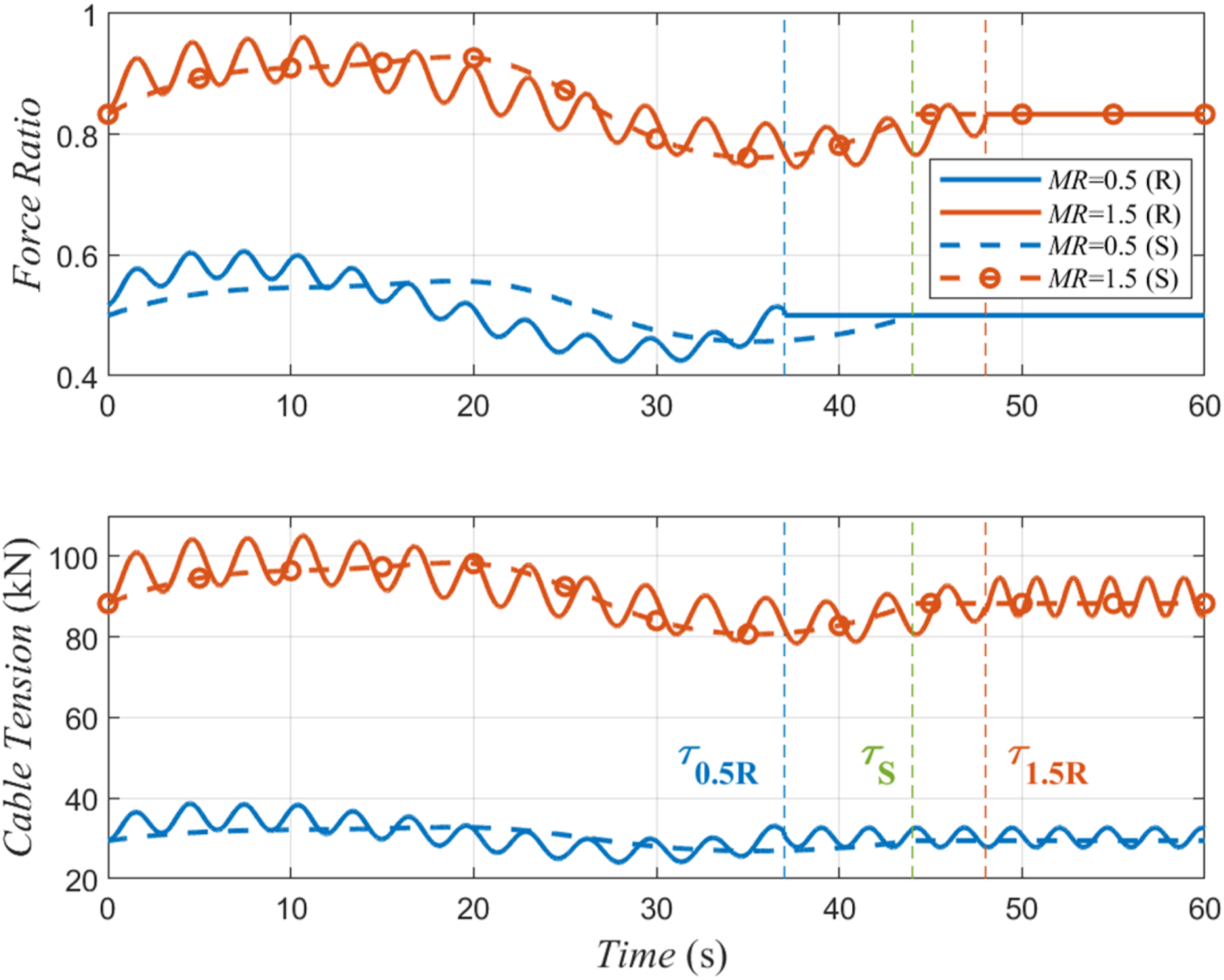
Figure 2 shows the helicopter’s horizontal displacement and velocity. The referenced takeoff is characterized by a sharp increase in velocity, contrasting with the smoother and more gradual takeoff provided by the shaped input, which enhances stable system behavior during the cruising phase. Post-takeoff, the reference case shows fluctuations in velocity. As the mass ratio increases, velocity builds up more gradually, delaying the time required to achieve the final desired velocity. The consistent response observed in the shaped cases can be attributed to the use of identical kinematic input functions, which are successfully reached and followed.
Figure 3 illustrates the helicopter’s vertical displacement and velocity. The shaped takeoff features a balanced vertical velocity that smoothly increases and then decreases back to zero when reaching the desired final altitude, in contrast to the referenced case which exhibits unstable vertical velocity.
Figure 4 shows the bucket angle and the helicopter’s pitch angle. The shaped input effectively absorbs the continuous fluctuations in the bucket angle, which otherwise cause undesired fluctuations in the helicopter’s rotor pitch angle to counteract the bucket’s swing. The consistent frequency observed is attributed to the fixed cable length of 10 m, resulting in a periodic time of 6.34 s. Post-takeoff, the shaped input maintains a stable bucket behavior, unlike the continuous swing observed with the unshaped, referenced input. Additionally, the smoothness of the shaped input results in a reduced bucket swing amplitude. It is also noteworthy that the pitch angle is set to zero just after takeoff, creating a smooth descending angle when the shaped input is applied. Moreover, in the reference case, a higher bucket swing angle and lower pitch angle are associated with the lesser water mass.
The bucket swing angle shows one oscillating cycle since the ratio between the constants
Figure 5 illustrates the force ratio and tension in the cable. The reference case is characterized by a highly fluctuating response. In contrast, the shaped case exhibits a smoothly varying force ratio and cable tension. In both cases, the force ratio remains within its limitations, and the cable tension is consistently taut, as indicated by its positive values, thereby confirming system’s assumptions. The lower mass ratio corresponds to a lower required force ratio and reduced cable tension. Notably, the helicopter’s thrust force, just after takeoff, is assumed to equal the total system’s weight.
Takeoff time for the referenced and shaped inputs of different cable lengths and mass ratios.

Figure 6 shows the helicopter’s final horizontal displacement, bucket maximum swing angle, maximum force ratio, and maximum pitch angle, of the shaped input, versus takeoff time for a cable length of 10 m, mass ratio of 0.5 and 1.5, and constants Horizontal displacement, bucket angle, force ratio, and pitch angle versus takeoff time.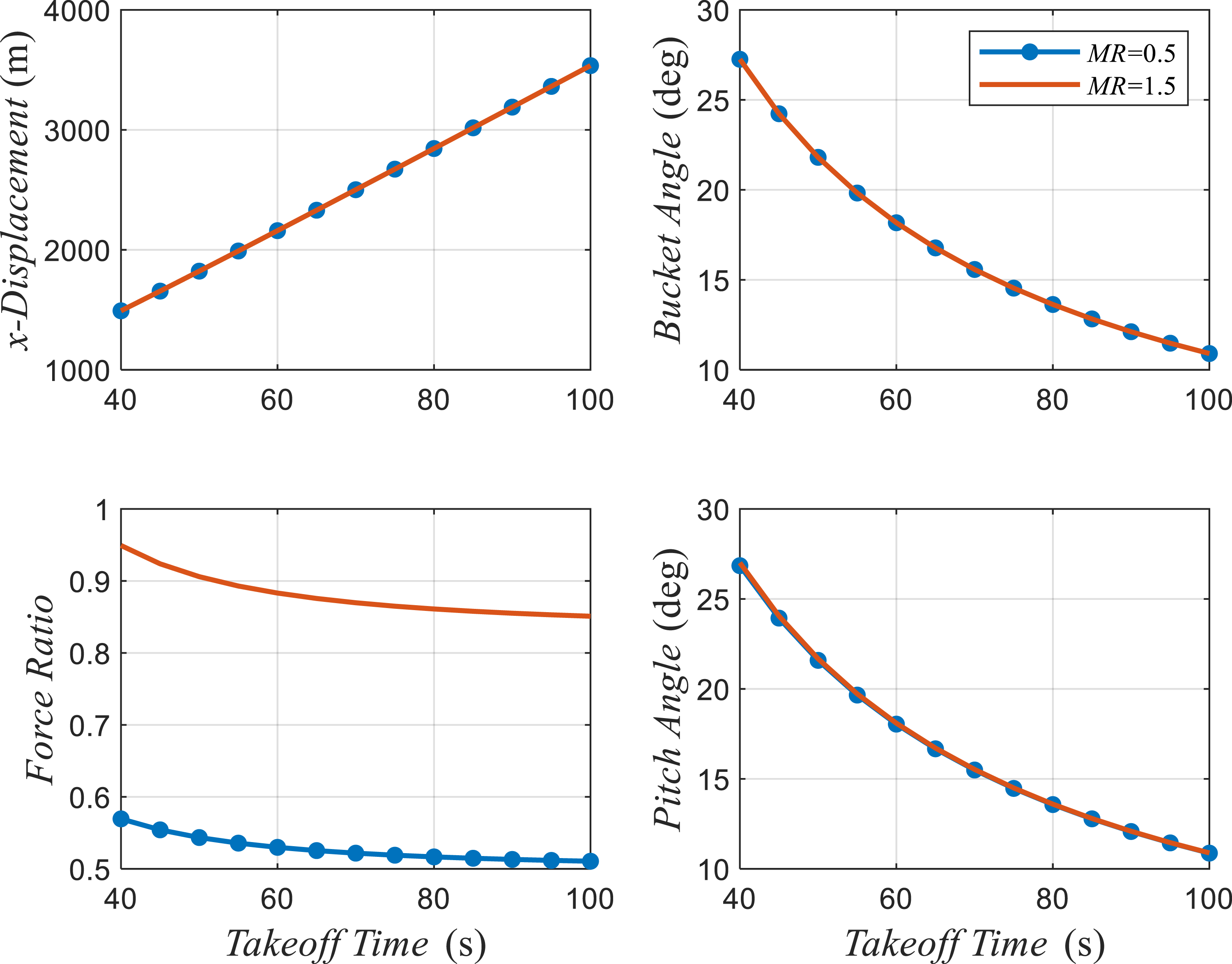
Figures 7–9 show system response of the shaped input for cable length of 10 m, different mass ratios, and different constants Helicopter vertical displacement and velocity versus time for different cases. Helicopter horizontal velocity and force ratio versus time for different cases. Bucket angle and pitch angle versus time for different cases.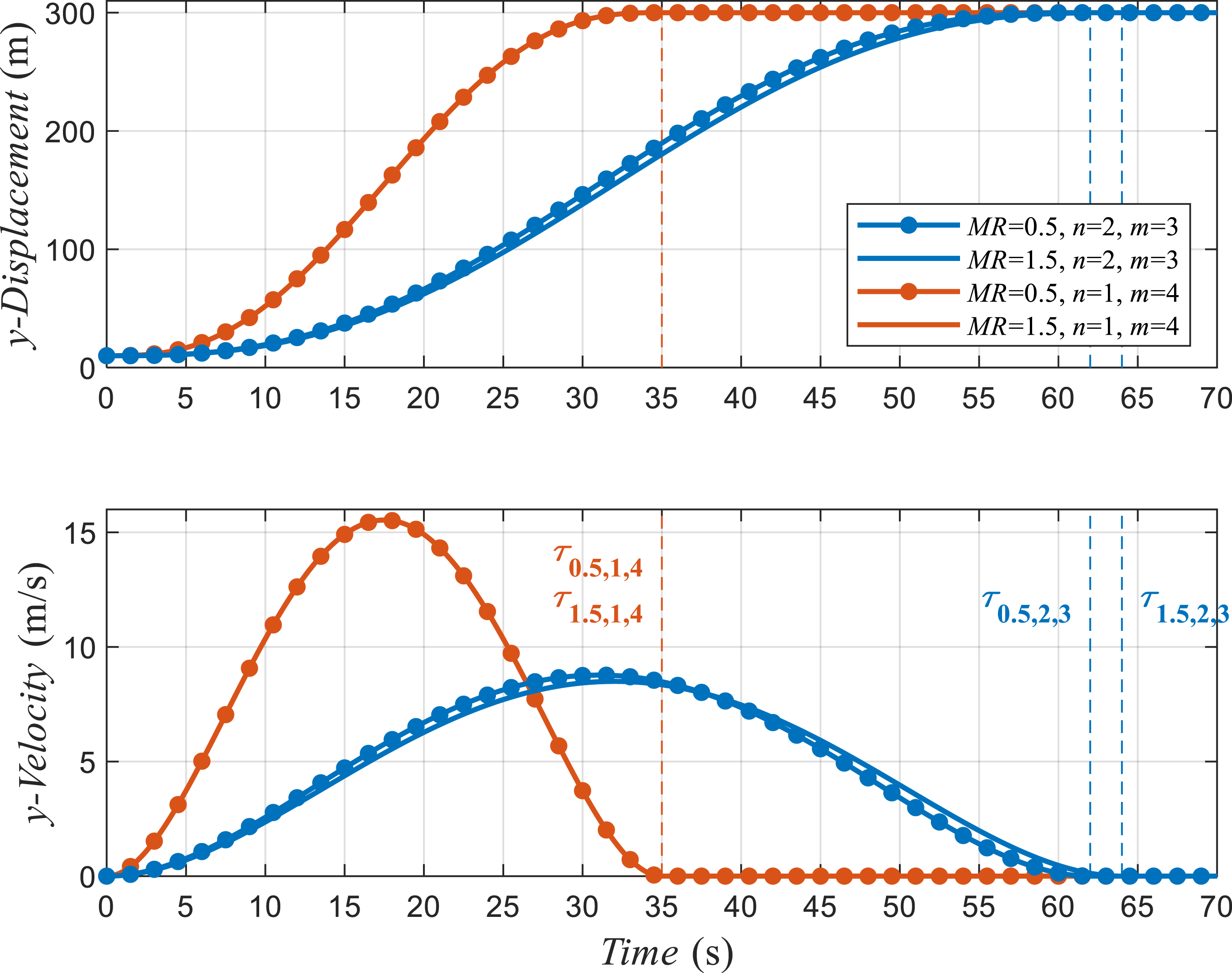

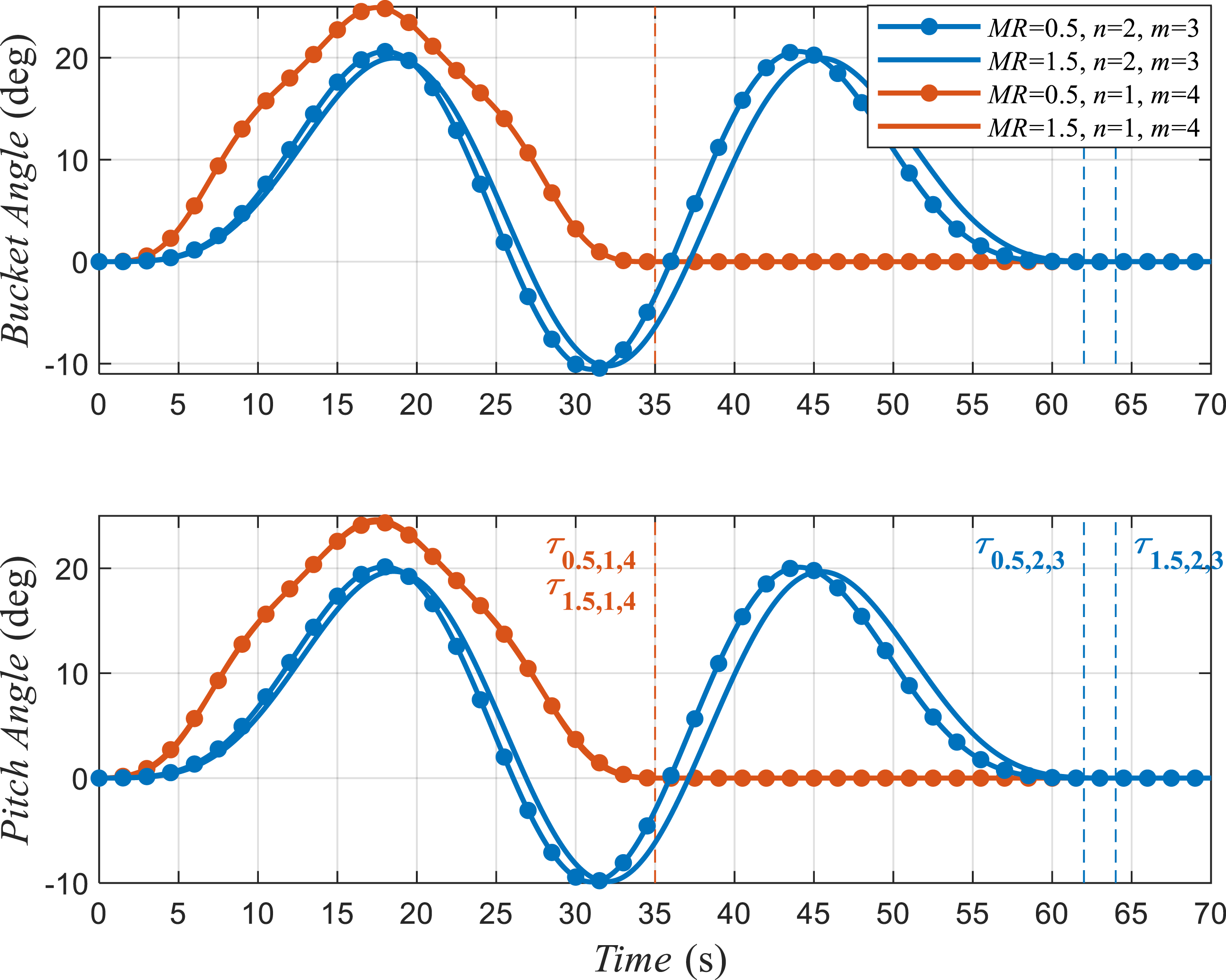
The results reveal that when the constants
Moreover, when the bucket angle is small and
However, lower values of
Figure 10 shows the minimum required takeoff time that satisfies system conditions and constraints, maximum bucket swing angle, maximum force ratio, and maximum pitch angle for various values of constant Takeoff time, bucket angle, force ratio, and pitch angle for different cases of 
However, in the case where
Conclusion
The study proposed an input shaping scheme for a firefighter helicopter to minimize the swaying of a water bucket suspended by a cable. A three-degree-freedom model was employed to analyze the dynamics of the system and to transition it from its initial state to a predefined final state as fastest and smoothly as possible.
The work demonstrated that shaped input control for a firefighting helicopter optimizes the system’s dynamics. It showed that helicopter displacement, velocity, and bucket angle responses are consistent across different mass ratios. The dominant input frequency significantly influences the bucket’s oscillatory behavior. Despite varying parameters like takeoff time and system constants, the model predicts stable outcomes for force ratio and pitch angle. Overall, shaped input enhances system performance by smoothing the helicopter’s movement and reducing bucket oscillation, thereby improving operational efficiency.
Footnotes
Author Contributions
• Khalid Alghanim: Idea and conceptualization, Methodology, Modeling, Theoretical analysis, Numerical simulations and plots, Results analysis and interpretation, Writing and reviewing manuscript.
• Reem Alshareedah: Modeling, Theoretical analysis, Numerical simulations and plots, Results analysis and interpretation, Writing and reviewing manuscript.
• Abdullah Mohammed: Conceptualization, Results discussion.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Ethical Statement
Data Availability Statement
All data generated or analyzed during this study are included in this published article.