
Abstract
To meet the energy demand, over and above to build a clean pollution-free environment, wind energy is playing an incredible role. The development in the field of wind power generation is rising speedily. Operation and maintenance of the nonlinear wind energy conversion system (WECS) with stochastic wind input are pivoted on the control techniques used for the overall system. Many research works are undergoing which are based on various control schemes for different parts of WECS. Thus, this paper presents a review of advanced modern control strategies utilized in different parts of WECS with two popular types of grid-connected generators to achieve the desired power level and fault-free operation developed in the last 15 years. The review paper intends to provide a suitable reference for further research in the field of wind energy to have a bird’s eye view from the tabulated information and presentation.
Keywords
Introduction
The rising demand for electricity and the scarcity of fossil fuel has intended to enhance the utilization of renewable energy sources for both economic and environmental benefits. WECS is regarded as a bulk supplier of electric power to power grids and wind power production is growing rapidly day by day. As indicated by the Global Wind Energy Council 1 as of 2019 more than 90 countries around the globe are utilizing wind power for a global total 651 GW. One of the biggest present challenges to wind power is the requirement of developing new techniques for qualitative, quantitive and cost-effective wind power generation.
According to the orientation of wind turbines (WT), it is classified into two types i.e. horizontal axis wind turbine (HAWT) and vertical axis wind turbine (VAWT). The HAWT with variable speed mode is the most convenient and commonly used WTs. The WT is able to extract more energy by adjusting the rotor speed. Such flexible wind speed operation also reduces drive train mechanical stress and smoothes output power. In a WECS after the WT the wind energy is converted to electrical energy through an optional gearbox and a generator attached with it. Doubly-fed induction generator (DFIG) and permanent magnet synchronous generator (PMSG) are predominant types of generator though other types of the generator have also been used. In today’s competitive energy market the implementation of simple, reliable, efficient and cost-effective WECS is highly recognizable. But the nonlinear aerodynamic system, the mechanical complexity in the system, the presence of different kinds of faults make the operation of WECS more complicated. For the safety of WECS many efficient control strategies such as supervisory control for the startup and shut down of WT, blade pitch angle control, generator torque control, yaw control, internal generator control, power electronics devices control, pitch actuator control, fault-tolerant control etc. are implemented. Also, IEEE Standard 519–2014 2 requires that WECS must stand with the grid for a temporary overvoltage at the grid interconnection. Numerous research works are going on based on new control strategies for the improvement in the operation of WECS.
Many researchers have contributed reviews with a focus on different aspects of the WECS. As the effect of WECS in large rating has a sizable impact on the grid, the grid-connected systems with WECS are the circle of research. Nevertheless, the study also diverges towards small rated WECS for standalone operation. 3 looks into variable-speed wind turbines, as the future trend in wind energy conversion, in contrast with the traditional fixed-speed wind turbines. Indirect-drive and direct-drive turbines are also contrasted for such a system. 4 presents a speed-sensor-less control of voltage and frequency for a stand-alone DFIG based on the root mean square (RMS) detection scheme. The reviews covering power electronics topologies are excluded. 5 brought out a comprehensive review of the four most popular maximum power point tracking (MPPT) control methods. Later on Kumar and Chatterjee 6 classified MPPT according to the power measurement i.e. direct or indirect power controller with a detailed assessment taking different parameters important during implementation. Tiwari and Babu 7 focused on the structure of different pitch angle-based controllers from traditional to the modern approach. The stochastic nature of wind power specifically attracts power smoothing control. From the review of simulation results, 8 the kinetic energy of the inertia control method is a superior power smoothing approach above pitch control with FLS and DC link control by d axis current. 9 reviewed control schemes used in grid interfaced WECS for rotor side converter (RSC) and grid side converter (GSC) control. They brought a comparative presentation of rotor flux-oriented control (FOC) and direct torque control (DTC), voltage oriented control (VOC) and direct power control (DPC). Also, the performance of the VOC by different current controllers is presented. To protect the WECSs during the line fault condition and keep it connected to have low voltage ride through (LVRT), energy storage-based approaches are put side by side without an energy storage system. 10 They emphasize that the chopper circuit-based fault protection method is gaining interest due to the simplicity and low voltage ride through (LVRT) capability with reduced cost as no energy storage system is involved. This protects the DC link capacitor from the unwanted change in DC link voltage. 11 brought a review on position/speed sensor-less control strategies for direct-drive PMSG-based WECSs with a focus on observers for the unmeasured signal. Such control can improve the reliability of control for sensor faults and has significance in cost reduction. 12 reviewed on converter fault diagnosis including both model-based and pattern-based methods and the challenges. 13 covered issues from feasibility to utilization including some insight into the adaptive and robust control applied to WECS. 14 summarized updates of numerous WT control techniques with their performance on research literature available up to 2016. Also, for internal fault, a review has been brought with more focus on model-based fault detection and control 15 but, further review of fault-tolerant control has been left out in the earlier review. However, there has been researching advancement beyond that.
This paper overviews variety of research works based on various types of control strategies utilized in different types as well as different parts of WECS in the last 15 years with a specific focus on modern control techniques effective on large scale WT to make this power more reliable. The two most popular generator configurations of WECS in the state of art is discussed in this perspective. This paper is categorized as follows. The upcoming section corresponds to a summary of control techniques with different generators DFIG and PMSG. Next, the turbine level control techniques and control techniques for resilience based on fault detection, isolation and accommodation are briefly reviewed. The emerging technologies are briefed in a later section. The overall concept is concluded with future directions.
Control techniques of generators in WECS
Modern control theory works on the state space model of a physical system with a set of input, output and state variables related by first-order differential equations. Nonlinear, multivariable, adaptive and robust control are elemental to it and more diversifications are seen in WECS as per the present study which is shown in Figure 1. WECS has nonlinearities, so approximation as linear and the applying linear control in the frequency domain makes the controller sensitive and degrade performance for a wide variation of the operating point. Figure 2 represents a simplified diagram of WECS. This system consists of a wind turbine, a gearbox, a generator and power electronics converters (PECs). For DFIG the connection of the PECs is in the rotor circuit whereas for PMSG its connection is in the stator to grid interconnection. The wind energy is captured by rotor blades of the WT and it is transmitted to the gearbox where the turbine speed increases to the generator speed.

Classification of modern control applied to WECS.

Simplified diagram of WECS.
Control techniques of DFIG based wind turbines
In DFIG the stator winding of the induction generator is directly attached to the grid and the rotor winding is attached to the grid over a power electronics converter. The power converter consists of a rotor side converter (RSC) and a grid-side converter (GSC) interconnected via a DC link, with an intermediate capacitor which is used for energy storage purposes. Three types of controllers are used in this system. The first one is the generator level controller which comprises RSC and GSC controllers. The main intention of the RSC controller is to extract maximum energy from the wind and the GSC controller is used for adjusting reactive power to/from the grid. The second one is the turbine level controller which incorporates a torque controller and a pitch controller. The torque controller forces the turbine power to the optimal power level (MPPT/region 2 control) at low wind speed and the pitch controller regulates the pitch angle of the blades so as to maintain the optimal power level constant at high wind speed (pitch control/region 3 control). The third type of controller is used at the power plant level which regulates the power generation of the whole plant according to the grid necessity. The gist of developments of control for such WECS in a timeline is presented in Table 1 to have a quick look.
Comparison of different control techniques for WECS with DFIG.

DFIG based wind turbines are becoming more successful because of their ability to achieve superior power quality. Many control strategies are utilized to achieve improved control objectives. The conventional vector control method includes flux oriented control (FOC) and voltage oriented control (VOC) methods. The abc-dq0 transformation gives the controllable quantities to be adjusted by conventional PI controllers. But, these control methods require exact information of machine parameters such as stator resistance, rotor resistance, inductance, mutual inductance etc. As these methods are sensitive to model uncertainties, so this may lead to degradation of system performances. This problem can be overcome by using direct power control (DPC) and direct torque control (DTC) methods. The DPC method requires stator flux and stator resistance for the suitable voltage vector selection. Whereas the DTC method uses the value of stator flux and torque to regulate the machine torque. Here the convenient voltage vector is chosen on the basis of stator flux position and active reactive power errors. Another Feedback PI direct power control approach is suggested in Bourdoulis and Alexandridis 16 which is independent of a flux measurement. Here an extra parameter-free PI power controller is recommended to achieve maximum power. But, ripples are observed in output. Besides appropriate operation throughout parameter variation and fast dynamic response DPC suffers from variable switching frequency, and a large ripple in current and power. So for better operation with constant switching frequency the integration of DPC with space vector modulation (SVM) is suggested in Wandile et al. 17 This strategy for power quality improvement through the RSC controller also provides a unity power factor operation and a smooth DC link voltage through the GSC controller. A coordinated control approach is developed for RSC and GSC in Shehata, 18 where the DPC principle is applied on the GSC side and the total sliding mode controller (TSMC) principle is used on RSC side, to provide a fast transient response under reference power variation condition. Here the switching surface of TSMC is designed by using active and reactive power error. The proposed method is less complicated compared to VOC and FOC methods. Another integrated GSC and RSC control method i.e. direct-current vector control is proposed by Li et al. 19 It is also found out that this technique is more efficient than the conventional VC method in the case of power extraction control, reactive power control and grid voltage support control. However, it is unstable for moderate voltage sag and switching frequency is not constant. To improve transient performance and to provide stability in the frequency domain an active and reactive power control of the DFIG based WT system through feedback technique is analyzed by Kaloi et al. 20 In this approach, the oscillation of the generator is diminished by controlling the rotor current and grid current. But, DC link voltage has a high overshoot and angular speed has flickers for a step change of wind speed. A comparative study between the application of DPC and DTC control strategy in DFIG based WT system is represented in Wu and Yang 21 and it is observed that better performance can be realized by the utilization of DTC technique.
To maximize the power extraction level of DFIG based variable speed WT fuzzy logic control (FLC), robust control, sliding mode control (SMC), adaptive control etc. are applied. For bounded machine parameter variations self-gain scheduled LPV is proposed that works better than a deadbeat controller for RSC. 22 The application of SMC in the WT system makes it robust in case of parameter variation and external disturbances. It is also necessary to limit the captured power. Higher-order SMCs are used to avoid chattering problems and undesirable mechanical stress. A second-order sliding mode control (SOSM) technique for the MPPT is suggested by Beltran et al. 23 to obtain maximum power by directly tracking the DFIG torque. Furthermore, a cascaded nonlinear control approach is designed by Abdeddaim and Betka 24 which incorporates two loops. In the outer loop, the MPPT algorithm is applied based on fuzzy logic theory to extract optimal power value and the inner loop consists of SOSM strategy to supervise the amount of stator active and reactive power between the machine and grid. A robust fractional-order sliding mode (FOSM) is also proposed by Ebrahimkhani, 25 in which the control law is developed by integrating the sliding mode method and fractional order surface. Many classical controllers such as PI controllers are still considered a good option for wind turbine control. But the use of a conventional design approach for the controller’s parameter tuning makes it less desirable. PI regulators work well only for small parameter variation so an adaptive controller is essential if the system is uncertain to overcome infeasibility conditions. The adaptive controller adapts the controller design according to the changes in the system parameters. The utilization of an adaptive control system is suggested by Estahbanati. 26 Here the active power of the converter is controlled to track the optimum tip speed ratio of WT by varying the rotational speed of the generator and speed of the rotor, to extract maximum power. There are various types of adaptive controllers used in WECS such as a model reference adaptive controller (MRAS), self-tuning controller etc. A rotor current based MRAS observer is implemented in Pena et al. 27 in which the estimated rotor current is compared with the actual current. A PI controller is then used to reduce the error value to zero. To support huge variation in grid parameters value an adaptive controller based on back-stepping control design method is suggested in Okou et al. 28 This technique automatically adjusts the generated active and reactive power values to accommodate changes in the power grid. Robust adaptive controller based on back-stepping control design method 29 based on Lyapunov’s stability work preserving nonlinearity but machine parameters is considered constant. Adaptability and learning capability of soft computing techniques for instance fuzzy approach, artificial neural network etc. also make a good alternative for nonlinear WT system. A variety of fuzzy control approaches like TSK (Takagi-Sugeno-Kang) adaptive fuzzy controller, 30 type 2 fuzzy logic controller, 31 adaptive neural network controller 32 are proposed for making the system more efficient and robust.
Dang et al. 33 and Kamel et al. 34 proposed nonlinear MPC that preserves model nonlinearity and acts for internal and external disturbances. But, it requires a high amount of computation. Bayat and Karegar 35 and Muhando et al. 36 proposed that MPC with constraints works for SISO design to keep control signals bounded. This needs accurate measurement of wind speed. A multiple model predictive control (MPC) for MIMO design to control both MPPT and pitch has been proposed that has less flicker and smooth transition between different models with observers. 37 For low wind MPPT control, maximum power is less as compared to PI. A multiple models MPC 38 shown reduced overshoot and power fluctuation. 39 has shown better control of power by MPC than fuzzy and PI controller on a linearized model. In case the grid voltage condition is not stable and to improve the power quality, a model predictive direct power control (MPDPC) technique is represented by Hu et al. 40 which can accomplish outstanding steady-state and dynamic results.
Control techniques of PMSG based wind turbines
This type of WECS consists of a wind turbine, a PMSG, two back-to-back PWM converters, which includes a machine side converter (MSC) at the generator side and a grid-side converter (GSC) coupled by an intermediate DC voltage link, and a controller. Here the wind energy is captured by the turbine and it is converted to electrical energy with the help of PMSG. The WT is directly attached to the PMSG without any gearbox.
The voltage generated by the generator is then rectified by the rectifier and power is delivered to the grid by inverter through a filter. Three types of controllers can be associated with the system i.e. generator level controller, wind turbine level controller for speed controlling and power limiting purpose, central control system for controlling overall power according to grid need. The generator level controller is mainly used for three purposes. The first one is related to the stator current control to operate the generator at unity power factor. The second one is related to the stator voltage control to guard the converter against overvoltage and saturation at high wind speed. The last one is stator current control to provide maximum possible torque which is also called maximum torque control. The controller used at GSC is used for maintaining constant DC link voltage, adjusting reactive power absorbed from the grid and to transport power from the generator side to the grid. The gist of developments of control in a timeline is presented in Table 2 to have a quick look.
Comparison of different control techniques for WECS with PMSG.
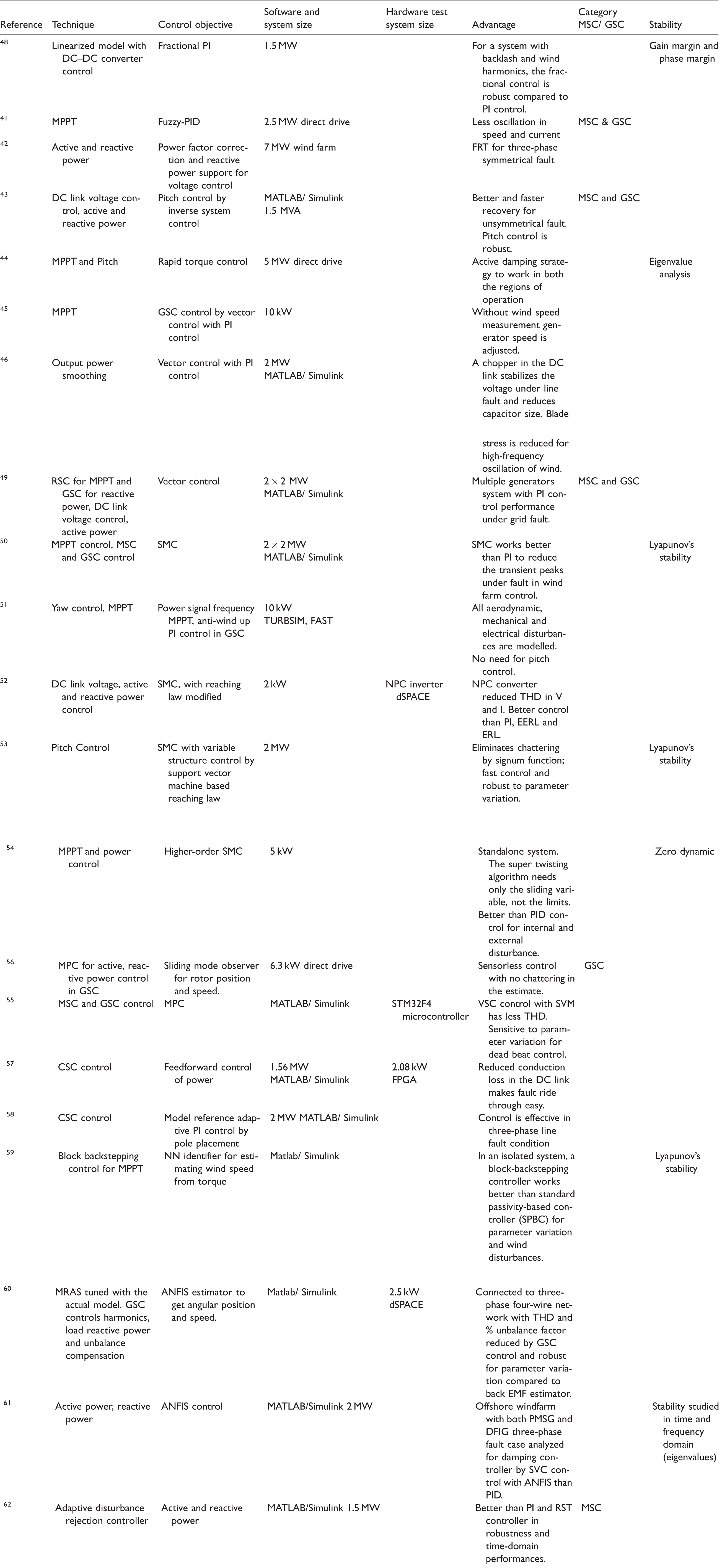
The performance of a PMSG based wind turbine relies upon both the operation of the generator and control techniques applied to it. Some conventional control methods used are the power factor control method for accomplishing unity power factor at the WT terminal, d-q vector control approach etc. To improve overall performance a direct current-based vector control technology is used in Li et al. 41 which incorporates fuzzy, adaptive and conventional PID control techniques. To improve voltage control in the system and to monitor the voltage at a faraway location a supervisory reactive power control is illustrated in Kim et al. 42 Generally, MSC controls the generated power by PMSG and GSC controls the DC link voltage. To avoid the event of a grid fault a unified power control strategy is proposed by Geng et al. 43 in which GSC automatically reduces generator current to maintain DC link voltage. Thus, it avoids using a DC chopper. A pitch controller strategy based on inverse system theory is also illustrated here, which is activated only when the generator speed goes beyond its rated value and extracted power reduces. As the wind speed changes, accordingly, it alters the voltage and frequency of the generator output. To maintain the load voltage and frequency for constant or varying load conditions MPPT technique44–46 can be applied at the GSC. Dealing high-frequency power fluctuation by GSC 46 not only achieves a smooth and stable power level but also reduces stress on wind turbine blades. A vector control (VC) approach is described in Uehara et al. 47 for a small scale standalone WECS. The use of maximum torque per ampere (MTPA), unity power factor control (UPF) techniques makes the variable speed WECS more complex and less productive. 48 proposed fractional PI control for DC-DC converter control for power control which surpasses PI control for isodamping feature for PMSG aging considered. Some nonlinearity is introduced but a nonlinear system is not considered.
Further, a combination of VC and MPPT technology is suggested in Errami et al.49,50 to capture maximum energy and to maintain amplitude and frequency of produced voltage in a wind farm with SMC under fault to exhibit better LVRT than PI controller. To protect the WT system from high wind speed and excess power value the application of a yaw controller based on the gain scheduling method is suggested by Shariatpanah et al. 51 To reduce chattering phenomena as well as to improve total harmonic distortion property a combination of SMC and enhanced exponential reach law (EERL) is suggested in Mozayan et al. 52
As the WECS is highly nonlinear, higher flexibility modern nonlinear controllers are desirable. Among them sliding mode controller (SMC) is a better option. A chattering free sliding mode pitch controller is presented in Xin et al. 53 To converge the sliding error to zero, a new support vector machine (SVM) based reaching law is suggested here. To avoid high frequency chattering high order SMCs (HOSM) 54 are used for power control of WECS. The chattering free behavior, simple architecture, finite-time convergence and robustness nature of the controller make it more efficient in case of power conversion and power regulation purpose. To limit the variation between the controlled variable and its reference, implementation of MPC and deadbeat control strategy is presented in Hassine et al. 55 Here MPC is exploited in MSC and the deadbeat controller is applied in GSC and it is seen that MPC is less sensitive to parameter variation than the deadbeat controller. To achieve stable performance, the implementation of an encoder-less fixed frequency model predictive direct torque controller (MPDTC) at the generator side and a finite set model predictive direct power controller (MPDPC) at the grid side is represented by Zhang et al. 56 Disturbance in wind speed causes power disturbance of generator output which leads to a large overshoot or undershoot in DC link current. In a Current Source Converter (CSC) interface to enhance DC link current and to improve stability of the system a power feed-forward controller is suggested by Dai et al. 57 Further in CSC to achieve a highly efficient, reliable and desired closed-loop response of WECS an adaptive PI controller is proposed by Giraldo and Garces 58 which can perform in crucial conditions like short circuit and rapid changes in wind velocity. An adaptive scheme for regulating the optimum equilibrium point of variable speed WECS is introduced 59 in which a neural network identifier is used to estimate the wind speed followed by a block back-stepping controller to govern the rotor speed to optimal speed value. This type of real-time nonlinear learning law eliminates the need for an offline training stage to obtain the optimal parameters. To avoid the highly uncertain operating condition of WECS an adaptive network-based fuzzy inference system (ANFIS) is proposed in Singh and Chandra 60 and Wang and Truong 61 which is capable of handling uncertainties and has characteristics of the artificial neural network. ANFIS is utilized for wind speed and position estimation which is constantly tuned with actual PMSG to neglect the consequences of parameter variation. An extended state observer-based adaptive disturbance rejection controller (ADRC) works robustly for active and reactive power control. 62
Turbine level control
The control of wind turbines aims at the tracking of the reference power curve shown in Figure 3. The turbine starts working only when the wind speed is sufficient for power production greater than the system losses (cut in) and in order to prevent serious damages, it is powered down and stopped when the wind speed crosses the cutout limit. The turbine control includes controlling of torque and the pitch angle of the blades to facilitate maximal power value at low wind speed and to restraint the captured power at high wind speed respectively. The various control schemes are tabulated in Table 3 starting from pitch control, individual pitch control, MPPT and joint control covering both regions 2 and 3 at last.
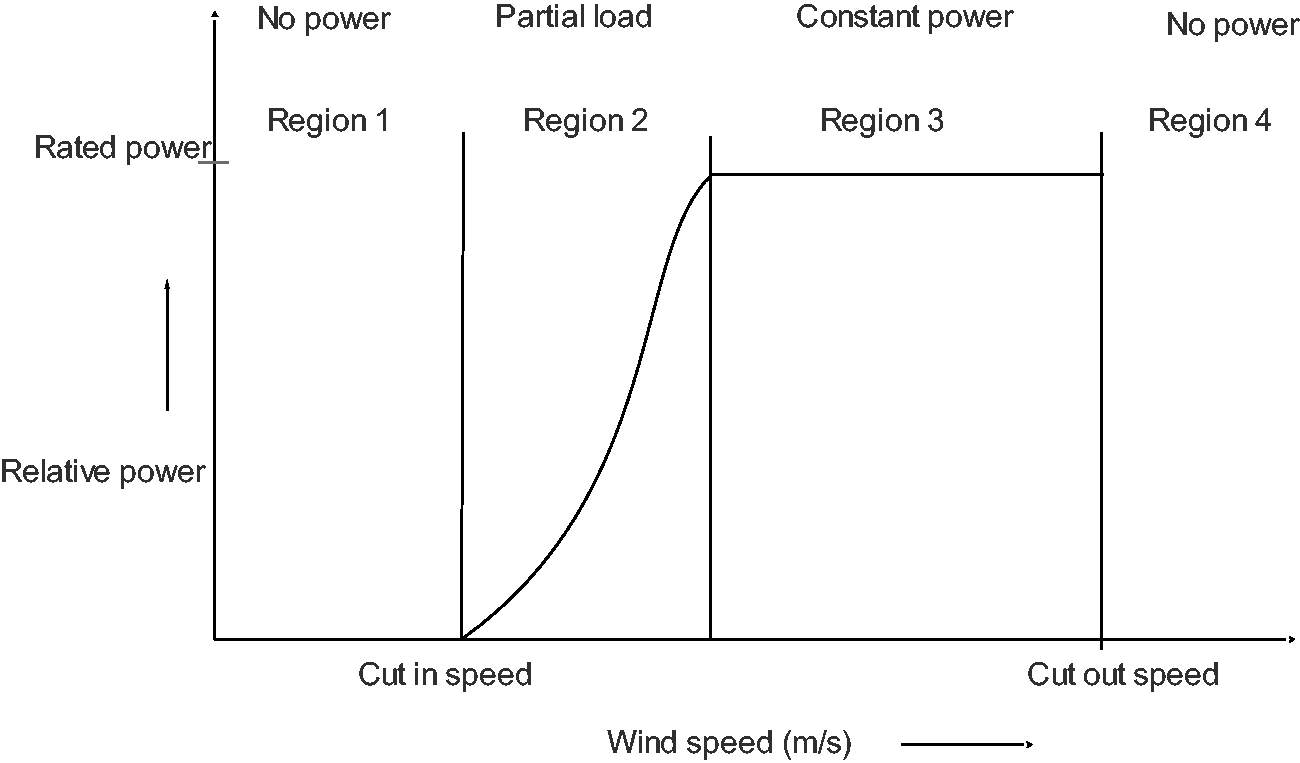
Power curve graph.
Comparison of different control techniques for turbine control in WECS.

The wind turbine system is huge in structure; hence it increases loads on it and in such a way it also increases the maintenance and the cost. So, the objective of modern wind turbine technologies is to provide more power output with reduced load at maximum aerodynamic efficiency and less cost. In the wind energy industry, the utilization of classical PI and PD controllers are considered as good options for control purposes. But these types of controllers work well only for small size WT systems. Conventional PI controller requires a perfect knowledge of system dynamics. This objective can be achieved by using some advanced control technologies such as fuzzy logic control (FLC), neural network (NN) methods, optimal control by Particle Swarm Optimization (PSO) etc., 63 adaptive control methods, linear quadratic Gaussian (LQG) control methods etc. Pitch angle controller based on fuzzy logic approach is presented in Van et al. 64 and Zhang et al. 65 in which the generator output power and speed are given as input to the controller which also set aside the use of anemometer. It takes the advantage to work on the nonlinear system. This method also gives better results than conventional PI control with and without gain scheduling and PID controller. An improvement in pitch control has been shown by fractional PI control that reduces chattering in power. 66 A comparative study between PI, fuzzy and fuzzy PID is represented in Civelek et al. 67 Here it is concluded that the implementation of a fuzzy PID controller will make the WT system independent of system nonlinearity and parameter variation. This technique can be easily executed in a microchip which makes the system’s lifetime longer and reduces the maintenance cost.
A WT system operates at unpredictable conditions and it also incorporates huge complexity of the machine. So there are chances of process parameter variation. An adaptive controller can change the control law or design problem according to the changes in process or plant to reduce output error. The direct model reference adaptive controller (DMRAC) technique is designed by Frost et al. 68 to achieve better generator speed regulation than the PI pitch controller. A self-tuning regulator (STR) is represented by Muhando et al. 69 to ensure optimum power conversion in all operating regions of the WT system. In Oh et al., 70 a torque estimator is utilized in partial load region for selection of appropriate torque profile by keeping the blade pitch angle at zero degrees and in constant power region pitch control acts.
Generally, the controller in a variable speed WECS has to achieve two main control objectives. The first one is to maximize the power efficiency by tracking the reference power curve and the second one is to improve dynamic characteristics by reducing the dynamic loads generating in the mechanical segment of the plant. For the above two purposes, an LQG controller is designed in Muhando et al. 71 which gives better results than the PID controller. An appropriate combination of reactive power and the pitch control by min-max LQG is an effective way of improving the stability preserving nonlinearity and enhancing the fault-ride through capability. 72 In region 3 the presence of rotational sampling effect makes the WT system unstable. Hence the use of the conventional PI controller and the adaptive controller is not effective in this region. An R-S-T controller based on the pole assignment method is suggested by Hossain 73 to degrade pitch oscillation as well as to reduce dynamic loads on the blades. LPV correction on PI controller improves power control. 74 Another method i.e. adaptive feedforward controller based on filtered-x RLS (FXRLS) algorithm 75 is utilized in this region to improve both rotor speed regulation and power maximization. An azimuth angle based simple PI controller with anti-windup can perform on IPC to reduce flicker in power and voltage and fatigue load. 76 At below-rated wind speed generally, a generator torque controller is applied to get optimal power value. But, in Johnson and Fingersh 77 an adaptive pitch controller is applied to get optimal pitch angle for energy capture in the partial load region. As the optimal pitch angle and optimal tip speed ratio values are not always known, so a combination of adaptive pitch angle and adaptive torque control is done here to accomplish maximum energy in this region. H_∞ robust control method and gain scheduling technique are applied for MPPT control. 78 Another adaptive torque controller is represented by Baygildina et al. 79 which can change the gain value continuously to adapt the optimal rotor speed and make the WECS more efficient. An adaptive torque control method is suggested here which uses the information about the available power to maximize power captured by the wind in the partial load region. Here a generator torque adaption law is established by continuously changing the torque control gain value in order to adapt the desired rotor speed value 80 for both pitch angle and torque regulation of the WT system. A hybrid controller design algorithm is suggested 81 in which integral SMC (ISMC) is implemented for torque control and a PI controller is utilized for pitch control to accomplish the desired power value. To achieve the above two objectives a sliding mode controller (SMC) is designed by Beltran et al. 82 which is robust in case of parametric uncertainties of the turbine. In SMC a control law is designed by using an adaptive gain which increases continuously to achieve zero power tracking error value. Again an integral sliding mode controller (ISMC) integrated with the MNR (Modified Newton Raphson) is designed for partial load region in Rajendran and Jena. 83 But, only an adaptive method may not work when the turbine model includes unmodeled dynamics.
To make a variable speed WECS truly cost-effective and reliable some smooth rotor speed tracking techniques are implemented such as adaptive feed-forward control based on filtered-x RLS (FXRLS), adaptive control based on LQG, 84 a hybrid method combining fuzzy and SMC, 85 radial basis function (RBF) neural network algorithm, 86 STR, 87 integral proportional control with a robust sliding mode approach, 88 etc. Adaptive controllers are used to system parameter variation by online adjusting the parameters like rotor speed, turbine speed, etc. These methods mentioned above are capable of achieving good response instead of disturbances and parameter variation.
For better results, modern technologies also implement observers, estimators etc. in WECS. To avoid unknown delays created by hydraulic pressure drive train unit a PI pitch control method is designed by Gao and Gao. 89 A hydraulic pitch system is proposed to mitigate fluctuations in power by adaptive SMC control of the pump and backstepping control of piston. 90 A comparative study between conventional SMC, aerodynamic torque feedforward control (ATF) and indirect speed control (ISC) is demonstrated here. SMC and ISMC show better results than ATF and ISC in the case of rotor speed tracking. Although SMC and ISMC are equally efficient, ISMC is more effective than SMC in case of transient load reduction on the drive train. This technique is formed by using a delay perturbation estimator-based compensator and an optimization technique. A combination of feedback and feedforward control design works on both collective pitch control (CPC) and individual pitch control (IPC) for turbulent real wind speed to reduce fatigue loads better than inverse system controller. 91 A polytopic model uncertainty for state feedback control design with Kalman filter for pitch control based on LMI can give improved transient performance in comparison to PI control with reduction of fatigue. 92 In a comparative approach for pitch control in a hybrid isolated system with a PI controller, the H ∞ controller reduced the excursion of pitch angle and mitigated stress of the blades.93,94 developed an H ∞ control approach that is robust and stable for different operating conditions than the PID controller and thereby improving the pitch control reducing fatigue of the actuating system. In some cases, pitch angles are adjusted identically whereas, in others, pitch angles are controlled individually. An individual pitch controlling approach is suggested in Selvam et al. 95 which consists of an LQG control for minimizing rotor and yaw movement and a feed-forward disturbance rejection controller. A robust performance can also be achieved by using the maximum power point tracking (MPPT) algorithm. An MPPT technology based on Wilcoxon radial basis function network (WRBFN) with hill climb searching (HCS) is illustrated in Lin and Hong. 96 Another hybrid controller combining MPPT technology with Improved Elman Neural Network (IENN) and modified PSO (MPSO) is described in Lin and Hong. 97 From the comparative results, it is seen that these MPPT technologies work better than both fuzzy and PI controller applications in the WT system. Kahla et al., 98 proposes a fuzzy-SMC MPPT control where the optimum controller is designed by multi-objective Grey Wolf Optimizer (MOGWO). The controller takes both changes in torque and power coefficient. 99 proposed a model-free MPPT that learns by reinforcement from the temporal relation of power with the angular speed of the rotor. This takes the advantage to apply the learning in the form of a Q- table for speedy MPPT control and has the advantage without wind speed sensors or knowledge of model or a tedious offline design process. In Asl and Yoon 100 presented an MPPT controller that compensates parameter uncertainties of the WECS nonlinear model deploying a linear observer that estimates some states for feedback control for a stable output.
The use of mono variable control technique such as pitch controller or MPPT works well for the controlled variable but produce a fluctuation in performance for other electrical or mechanical variables. 101 proposed a state-space model-based feedback controller for flicker reduction and fatigue reduction. An LQ based R-S-T controller for MPPT has considered the reduction of torque fluctuation as an additional objective that improves robustness. 102 For reliable and powerful operation multivariable control techniques 103 are used which include both generator torque controller and pitch controller. Some control strategies like PI fuzzy, 104 sliding mode etc. can be utilized for both the torque and pitch regulation. Similarly, two controller design approaches are studied in Simani and Castaldi 105 i.e. FLC and adaptive pitch controller which are used for both blade pitch angle control and generator torque control. A new design approach is proposed by Kusiak and Zhang 106 for efficient operation in which an adaptive controller is used for power maximization and minimization of generator torque ramp. A data mining algorithm is used to create a wind turbine power generation based on a wind power prediction model with a particle swarm fuzzy algorithm exploited to solve weighted objectives to achieve predicted power production. It is seen that compared to sliding mode, neural, LPV gain scheduling controllers the proposed controllers can achieve better performances. The wind speed has been estimated by Kalman filter and a gain scheduling control for both the regions of operation is proposed. 107 Another pitch control method is represented in Geng and Yang 108 which integrates an inverse system controller and a robust compensator. This method is better than the PID controller and works well in the case of parameter variation of the WT system. A maximum energy capture can be tracked by an optimum seeking algorithm, a nonlinear approach with an estimator for uncertainties and shows control inputs bounded. 109 A hybrid control strategy combining PI and fuzzy technique is used in Duong et al. 110 for smoothening output power fluctuation in all operating regions.
Fault tolerant control techniques in wecs
Reliability and efficiency are some important factors for a WECS to be competitive with the energy market. A WECS must be able to produce and maintain power production level even if a fault occurs. A system must have self-diagnosing and fault-tolerant capability. Therefore, some fault detection, accommodation and fault-tolerant control (FTC) strategies must be adopted to avoid faults from developing failure. Here, the review focuses on FTC only. Different kinds of possible faults can occur in a WECS. Some faults are very severe, such as actuator fault, which should result in a fast shut down of the system for safety purpose. Other faults like sensor fault, system fault are less severe which can be handled by the controller. So the major intention of a fault controller is to evaluate different process data for detection of the fault, isolate them and rearrange the controller to reimburse the faulty conditions. The chronological development of FTC is presented in brief in Table 4.
Comparison of different FTC techniques in WECS.

In order to verify fault detection, accommodation and isolation capability, a three-bladed horizontal axis variable speed wind turbine of rated power 4.8 MW i.e. benchmark model is represented in Odgaard et al. 112 A review of the condition monitoring system (CMS) and fault detection system (FDS) is proposed in Hameed et al. 113 to supervise, distinguish and detect fault actions. CMS can give early warning for better planning of maintenance and identification of the problem for reliable operation.
Generally, two types of FTC methodology are employed i.e. active fault-tolerant control (AFTC) and passive fault-tolerant control (PFTC). AFTC method requires a fault detection and diagnosis (FDD) scheme which gives up to date information regarding the status of the system. After that, a controller is reconfigured to enhance the stability and performance of the system. Whereas the PFTC does not need an FDD scheme or controller reconfiguration approach, it can withstand some predefined fault situations. For the detection of faults in current, voltage, position sensors some observers are considered in Rothenhagen and Fuchs 114 which measure the stator current, rotor current, stator voltage, rotor angle and then an open-loop configuration is taken for a short period of time for the isolation of fault. To control faults in a pitch system of WT the utilization of AFTC and PFTC based on LPV strategy is represented in Sloth et al. 115 and then in Sloth et al., 116 the use of four controllers i.e. nominal controller (NC), AFTC, robust controller (RC), PFTC are shown. It is concluded that LPV controllers give superior performance than the classical reference controllers. FTC is used to achieve the desired system performance regardless of the occurrence of faults.
For pitch angle regulation of WT, there are several kinds of sensor FTC strategies employed to maximize the power production level and stability such as AFTC based on adaptive approach, robust active fault-tolerant fuzzy (RAFTC) with a fuzzy PI observer, observer-based dynamic fuzzy FTC (DFFTC) for online fault estimation 117 etc. To overcome the problem of both senor and actuator fault the utilization of virtual sensors and actuators is presented in Rotondo et al. 118 Model reference neuro adaptive FTC 119 is also presented. A fuzzy gain scheduling (FGS) technique for a PI controller for sensor fault control an FDD scheme with fuzzy modeling and identification technique is suggested in Badihi et al. 120 whereas fuzzy scheduler FTC with a bank of observers is also applied. 121 AFTC based on data-driven approach tackles model uncertainties. 122 Novel active sensor fault-tolerant tracking control (FTTC) is proposed in Shaker and Patton 123 whose aim is to keep up the controller same for both fault and fault-free cases. This is accomplished by combining both Takagi- Sugeno (T-S) proportional state estimator and a PI feedback observer. This method is capable of estimating generator and rotor speed sensor fault to take some considerable action. 124 proposed for an offshore system active FTC scheme in region 3 using a robust extended LPV observer to tackle modelling uncertainty extending capability of a PI controller for various sensor faults and actuator fault in the generator. Some actuator fault-tolerant control approaches are also proposed i.e. PI controller with a sliding mode observer (SMO) for fault estimation, 125 a barrier Lyapunov function-based design for RBF NN based adaptive control under faults keeps the behavior of the system in the desired bounds, that too without the knowledge or estimation of system parameters or wind speed.126,127 proposed a method to utilize both the sensor and actuator faults estimates to control in region 2. To achieve a highly efficient and robust WECS a combination of three techniques i.e. a model predictive pre compensator to compensate fault in each component, a group of MPC to get optimum performance and a supervisory controller for decision making and management purpose is represented in Indriawati et al. 127 Yang and Maciejowski 128 designed an adaptive output feedback sliding mode controller using Linear Matrix Inequality (LMI) technique for actuator faults.
Technical innovation of wind turbine industry and research community
The renovation of wind energy technology could help in the betterment of the world’s environment by improving the quality of the air and thus by lowering the emission of carbon dioxide. This is possible by remarkably scaling up both onshore and offshore wind power installation. International Renewable Energy Agency 129 has stated that the onshore installation would escalate more than three times by the year 2030 (to 1787 GW) and nine times by 2050 (to 5044 GW) as compared to 2018 (542 GW). The offshore installation would raise approximately 1000 GW by 2050. Thus, it would deliver more than one-third of the total electricity requirement by 2050. Advancements in technology can help us achieve the goal.
To maximize energy production researchers are upgrading the blades’ aerodynamic profile and materials. Modern wind turbines are making use of longer, lighter rotor blades, increased hub height and advanced control systems. From the generator perspective, a permanent magnet induction generator (PMIG) and switched reluctance machine (SRM) also have the future potential in WECS. 3 Aiding further, 5 discussed new electrical machines in WECS such as CFDR constant-frequency double-rotor PMIG permanent magnet induction generator and SS-PMG slip-synchronous permanent magnet generator. For the applications of these new generators in direct and indirect drive applications, suitability, capacity, standalone or grid-connected operation, grid support and control aspects open new research arenas.
Researchers are also developing floating wind structures in deeper water to avoid fixed foundations. 130 More powerful WTs are developing by enhancing the installed capacity. For example, GE has designed the 12 MW WT whereas MHI Vestas has invented the 10 MW WT in 2018.
Some smart and intelligent WTs are manufactured for effortless monitoring and control. These turbines can use advanced methodology such as artificial intelligence (AI) driven software, sensors, forecasting mechanism and advanced predictive algorithms to improve the efficiency of WT in all-weather condition as well as it can anticipate any problem with WT components in advance.
Several WT installations with increased capacity, advanced technology, reduced cost and lower maintenance can help in significant growth of the wind market.
Generalized discussion on control
This survey provides an extensive overview of different control strategies for different parts of the WECS which includes different generators type i.e. PMSG & DFIG, wind turbine, and different faults etc. The literature publications covered in the three dominant areas taken up in this review with different types of modern control techniques for the period under study are presented graphically in Figure 4 to visualize the trend in brief. It indicates that adaptive control is dominating in turbine control whereas MPC and adaptive control are developing side by side in generator side control. This successful dominance of adaptive control is due to the slow dynamics of turbine level control and the need for control to tackle uncertainty in the system. MPC in power frequency or generator side control shows appropriateness for variations of load and fault tolerance for external faults.

Research trend of modern control in WECS (application-specific).
For the nonlinear system of WECS, the trend (Figure 5) within the fifteen years has shifted with more research focus on adaptive control for robustness in the turbine level control in the first phase, then the attention was shifted to generator control and with the advance of higher-order sliding mode controller, more accurate dealing with uncertainties in such nonlinear system the fast reaching to stability and smooth control has been achieved in the third phase. However, the trend is moving towards hybrid controllers to take multiple features. As SMC implementation works on a variable-switching frequency, so there is an issue of filters for power quality and discretization. However, for control sampling frequency is less so control can be done at a slower rate than signal sensing, but uniform sampling is easier to realize. Fuzzy controller’s rule-based flexibility attributes to its robustness in such a nonlinear system. Adaptive control has a future ahead for the electrical side with the development of digital techniques and computing facilities. The control techniques discussed here and tested on the experimental rig and specifically on CART/FAST have the attraction from the manufacturers. Multivariable control method for a balance of both optimum power generation and mechanical load reduction is pointed out as an issue in such an electromechanical structure. 131
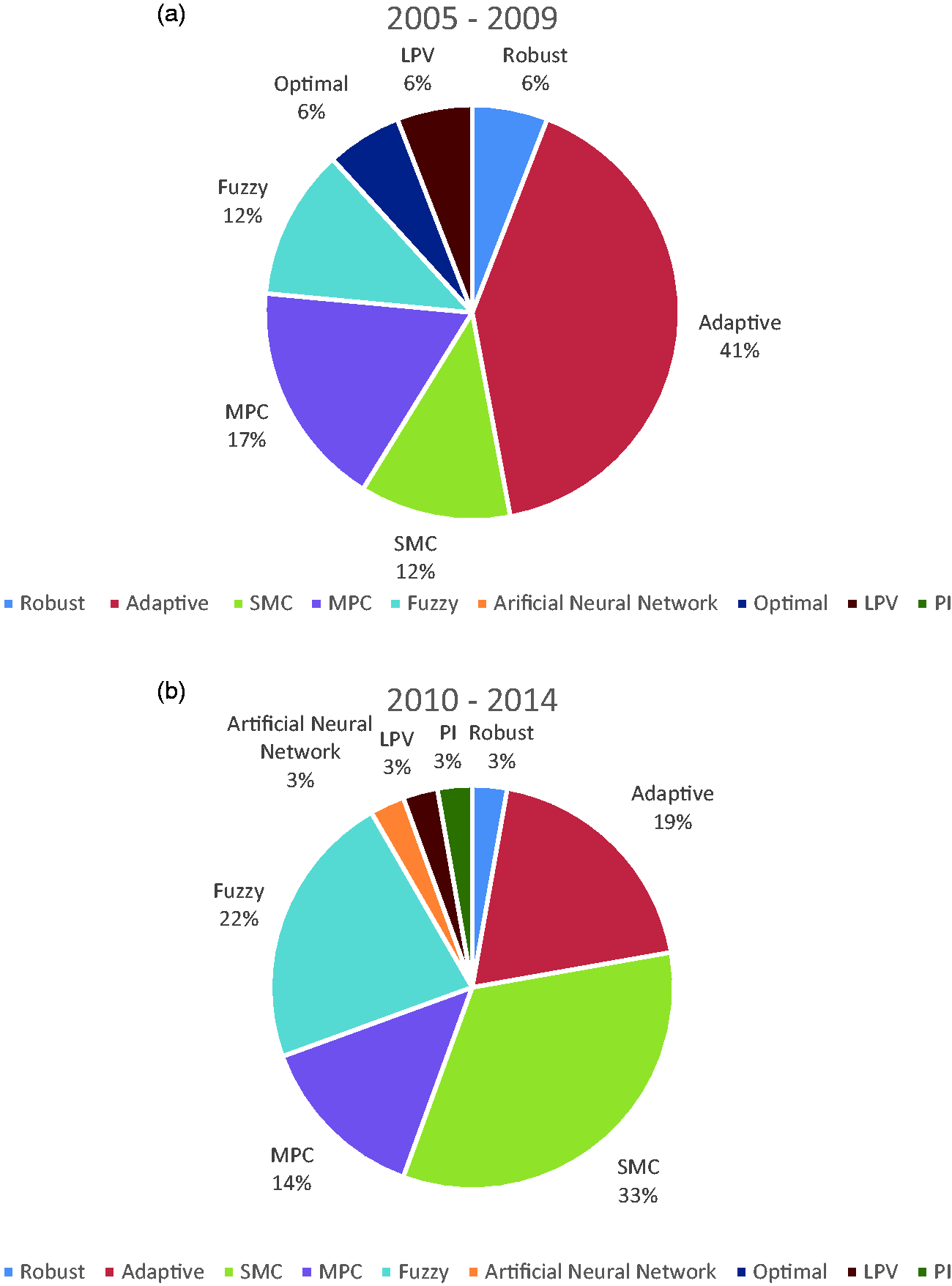
Trending modern control in WECS (period-specific): (a) Trend 2005–2009; (b) Trend 2010–2014; (c) Trend 2015–2019; (d) changing research trend.
The review of the outcome of the control applications for allied research and from a general research perspective in diverse fields are enumerated as:
To control in an organized fashion and for better decision making in choosing a proper controller, it is required to consider all different parts and more variables used in the system such as MIMO design which accounts for the cross-dynamics. A higher-order system can be controlled by dealing with the fast dynamics in MIMO and slow dynamics in SISO. Whereas the region 3 control is a regulator problem, region 2 control is a reference tracking problem. For the reference tracking again arises the concept of disturbance rejection. For nonlinear systems, the design of a controller for reference tracking with disturbance rejection in input as well as output is another thrust area of research. Self-tuning adaptive controllers are very sensitive but suitable for slow dynamics. It is suitable for turbine level control but for generator side control or FRT, it is yet to be judged. Estimators or observers can be used to minimize the dependence on sensors for measurements in an electromechanical rotating machine from power signals which can be fast and reliable control. Trained hybrid intelligent controllers with soft computing techniques such as swarm optimization, advanced artificial neural network, and Fuzzy can take up optimum control in the presence of unmodelled dynamics. Intelligent data-driven control concepts have given a new direction to fault-tolerant control design which can be applied to other systems in general. The vibration dynamics involved in some of the research work in turbine control can be referred to in mechanical systems control also. Robust control design such as H ∞ control concept has exhibited the highest robustness that can subside low-frequency oscillations in blades and thereby the actuator fatigue load and life of the moving parts can be improved in general. Most of the back to back converters are VSC, whereas the potential of CSC in WECS is scantly explored. Small scale WECS with power electronic interface can serve in a microgrid and down below. The control development research with the time frame of real stochastic wind are countable. In recent research works it is noticed that conventional vector control methods i.e. DTC, DPC combined with classical control methods i.e. PI, PD, PID etc. or intelligent control methods i.e. neural network, adaptive control, fuzzy control etc. or robust control methods or nonlinear control methods i.e. SMC are giving improved results. The use of some advanced control methods i.e. fractional-order SMC, higher-order SMC, type 2 fuzzy control are also achieving better performances. Data-driven approach shows a new direction of control that can be model-independent and fault-tolerant. In the case of fault control improved methodologies such as virtual sensors, actuators, observers, and estimators are exploited to accomplish a stable and desired performance in software simulation. However, testing of the FTC in hardware is negligible. Emerging electrical machines do also give an open end for research in wind power applications.
Conclusion
This paper tried to review numerous control techniques that are implemented in several research articles mostly in large size WECS with DFIG and PMSG in grid-connected configuration and further discussed techniques to handle the faults inside. There is scope for power electronics for interface and ancillary services, which are beyond the scope of this paper. The chronological development presented in comparative tabular form will be a reference glossary for novice researchers in the research area to move ahead in the next decade. Notwithstanding above the review in no way claims to be complete and the exclusion of any work is unintentional.
Footnotes
Data availablity statement
Data sharing is not applicable to this article as no new data were created or analyzed in this study.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.