
Abstract
This article studies the trajectory tracking of an underactuated unmanned surface vehicle. The trajectory tracking controller is divided into two parts: the kinematics controller and the dynamic controller. Taking the hull coordinate system of the unmanned surface vehicle as the datum plane, the kinematics controller is designed based on the backstepping method, and the virtual control input of the speed and the heading deviation of the ship are obtained. A dynamic controller is designed through an exponential sliding surface to stabilize the error of speed and heading deviation, thereby stabilizing the position error. In the process of designing the controller, the stability of the entire closed-loop control system is analyzed using Lyapunov stability theory. Finally, the designed numerical simulation experiment is carried out. The proposed exponential sliding mode controller is compared with the global integral sliding mode controller, and it is verified that the proposed controller has better effectiveness and robustness in the trajectory tracking of the underactuated unmanned surface vehicle.
Introduction
Unmanned surface vehicle (USV) can perform tasks in various unknown and complex surface environments due to its autonomy, intelligence, and modularity. It is widely used in meteorological watermark measurement, island coke surveying and mapping, marine pollution prevention, rescue, subsea exploration, and other dangerous missions with high coefficients and harsh environments.1–4 Research on trajectory tracking and control of underactuated USV has received wide attention in recent years. Trajectory tracking control means that the ship reaches the target position within a specified time according to the route designed by the planner, so as to realize the safe and efficient operation of the ship. Generally speaking, USV has no lateral propulsion, which makes its motion model underactuated. At the same time, the external interference and the unmodeled part of the dynamic system make the USV have unpredictable nonlinear characteristics, which makes it extremely difficult to carry out trajectory tracking control. At present, the main methods of underactuated USV trajectory tracking control include feedback linearization method, predictive control method, backstepping method, and sliding mode control.
The feedback linearization method can simplify the complex model, which makes it easy to adjust the parameters. Lefeber et al. 5 proposed a simple state feedback control law and proved that the control law can make the dynamic and global tracking errors exponentially stable and carried out the ship model experiment. Paliotta et al.6,7 determined a forehand position on the USV and controlled the movement of this point along the trajectory based on the input–output feedback linearization method. However, the feedback linearization method requires a more accurate mathematical model. If the mathematical model cannot be accurately established, the part that has the greater impact on the system will cause the controller to fail to stabilize the system.
The predictive control algorithm is convenient to support various constraint conditions, and predictive fitting is performed as much as possible through rolling optimization, which has a good control effect. Culverhouse et al. 8 proposed a robust adaptive autopilot based on model predictive controller (MPC), which can handle sudden changes in system dynamics. Liu et al. 9 used differential homomorphism and state-dependent Riccati equation (SDRE) theory to design the control law for the underactuated surface ship with limited input and used the convex optimization method to solve the constrained control input of the system. Liu et al. 10 proposed a nonlinear model predictive control, where system constraints on inputs, input increments, and outputs are incorporated into the nonlinear MPC framework. Oh and Sun 11 proposed an MPC scheme with line-of-sight (LOS) path generation capability using a quadratic programming method to solve the ship’s LOS model linearization. But the predictive control algorithm requires a lot of computing power because it needs a lot of online optimization.
Backstepping is a control method based on the idea of compensation, which decomposes a complex system into simpler subsystems and then reversely controls the system by introducing virtual control variables. It is often used to combine with other controls. Djapic and Nad 12 introduced the design and simulation implementation of a nonlinear controller for underactuated USV based on the command filter backstepping method. Dong et al. 13 proposed a backstepping control algorithm based on state feedback, adding an overall action to the controller to further enrich the steady-state performance and control accuracy of the USV trajectory tracking control system.
In recent years, the sliding mode control method has received extensive attention from scholars due to its insensitivity and robustness to parameter changes and studies on its application in the industrial field.14,15 Structure change of sliding mode control has nothing to do with the object parameters and disturbances. Instead, the current state is used to adjust the structure to force the system state to enter the sliding mode surface and gradually stabilize along the sliding mode surface. Ovalle et al.
16
introduced some sliding variables with relative degrees to three different types of underactuated systems. Kim and Lee
17
proposed a robust sliding mode control method with disturbance observer and state observer, which achieved robust control of disturbances by controlling the angle of the water jet system. Jian et al.
18
combines backstepping control and sliding mode control to improve the robustness of the unmanned submarine under system uncertainty and environmental interference. However, due to the sgn function discontinuous switching of traditional sliding mode control, chattering exists in the initial state. In terms of eliminating chattering, Sun et al.
19
introduced a continuous differentiable approximate saturation function, and Sun et al.
20
constructed a continuous adaptive term to reduce the system chattering phenomenon. Shen et al.
21
constructed an integral sliding mode surface by an observer with the quantized output measurement and treated
The traditional sliding mode memory has good robustness, but there is a problem of convergence in unknown time. In order to suppress chattering and overcome the unknown time convergence problem of traditional sliding mode control, Venkataraman and Gulati 23 proposed a terminal sliding mode control. But when the system is far from the equilibrium point, the convergence speed of ordinary terminal sliding mode control is lower than that of a traditional sliding mode. Some scholars have proposed a global terminal sliding mode control, which enables the system to converge quickly under the combined action of linear and nonlinear surfaces. Guan and Ai 24 applied a global terminal sliding mode control to the stabilization of USV.
The new global terminal sliding mode control currently mainly used in single-input single-output systems is not applied in underactuated systems, especially in high-order underactuated systems. In this article, combined with the exponential terminal sliding mode control surface,25,26 a new underactuated USV trajectory tracking control method is proposed. The analysis of the controller and the design of the control law about exponential terminal sliding mode control surface is limited to the linear system, and there is no further study on the analysis and application on the nonlinear system. Therefore, this research method has not been applied to nonlinear underactuated systems at present. According to the motion mathematical model of USV, this article first converts the mathematical model of inertial coordinate system into a hull coordinate system so that it facilitates calculation. Second, through the analysis of the Lyapunov stability criterion based on the horizontal and vertical coordinate positions, the virtual control quantity of speed and heading error are determined. Then, analysis and deduction based on the exponential terminal dynamic sliding mode determine the exponential terminal sliding mode control law that satisfies the second-order dynamic system, and finally verify the algorithm effectiveness through numerical experiments compared with the global integral sliding mode controller.
The main contributions of the job in this article can be summarized as follows:
The differential homeomorphism transformation is used to transform the dynamic mathematical model of USV in geodetic coordinate system into that in a hull coordinate system, which then makes it convenient to determine the virtual control quantity for a backstepping method later.
Exponential terminal sliding mode is applied to a multi-input and multi-output underactuated nonliner system. The mathematical model of USV is further transformed to change the original three-input control variables into two-input control variables through numerical derivation. Then the second-order exponential terminal sliding mode controller is constructed, which improves the trajectory tracking ability of the USV.
The parameter uncertainty of the USV and the influence of the external environment are considered, and the feasibility of the designed control law is verified by through Lyapunov criterion. The designed control law is also compared with the global integral sliding mode controller in the numerical test; results show that the proposed control method can not only converge rapidly but also restrain chattering effectively due to no switching surface.
The organization structure of this article is as follows: Section “Mathematical model of USV” introduces the motion mathematical model of USV. Section “Virtual control design based on Lyapunov” designs the virtual control variables through the reverse step method based on the hull coordinate system as the reference coordinate. Section “Exponential sliding mode controller” uses the exponential sliding surface to design control laws. In section “Numerical Simulation,” comparative simulation experiments are conducted to prove the superiority of the controller in this article. Section “Conclusion” makes a simple summary.
Mathematical model of USV
The trajectory control of USV is the control of underactuated system. The main control variables are the propulsion force and steering torque, and the controlled quantities are the position changes of USV in three directions: pitch, yaw, and bow roll. There is a complex nonlinear relationship in the motion process, which cannot be controlled directly by sliding mode control algorithm. The kinematics equation of the USV in the hull coordinate system can be obtained by the differential homeomorphism change, which makes the mathematical model of the position change linearized and facilitates the determination of the virtual control variable. The relationship between the control variable and the three controlled variables can also be obtained intuitively, which is convenient for further analysis.
Kinematics model
The USV has 6 degrees of freedom (DOF). When considering the trajectory tracking control of the USV, this article refers to a study by Sun et al., 27 and only 3-DOF, namely pitch, yaw, and bow roll need to be considered. It is assumed that the USV is symmetric, and the diagram of the 3-DOF plane coordinate system is shown in Figure 1.
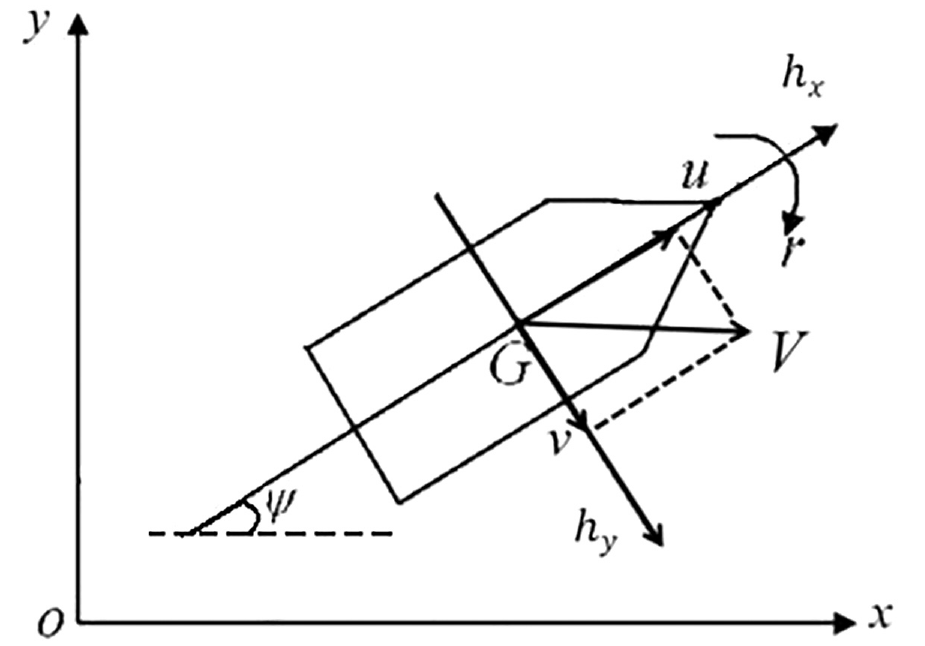
Schematic diagram of 3-DOF coordinate of USV.
Through analysis, the simplified kinematics model of USV can be obtained as follows

where
where

Dynamics model
The dynamics mathematical model of the USV can be described as

where
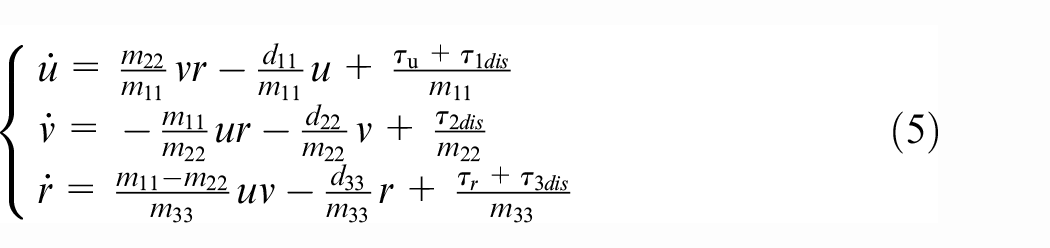
Among them, the disturbance is satisfied with
Motion model in hull coordinate system
According to equation (2), the kinematics model of USV, the formula for transforming the inertial coordinate system into the hull coordinate system can be obtained as follows
According to equation (6), USV’s longitudinal coordinate, transverse coordinate, heading angle, longitudinal speed, transverse speed, and angular speed in the hull coordinate system can be as
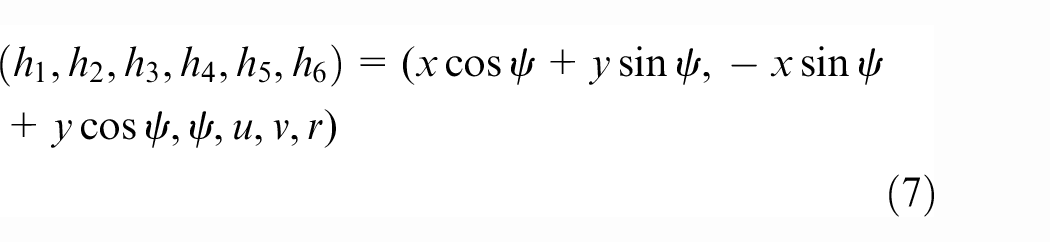
The differential homeomorphism transformation is performed on the USV system, and the new state space equation is obtained as

Among them,
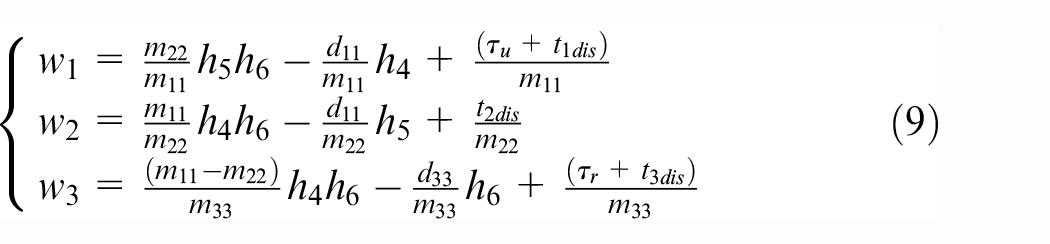
Because
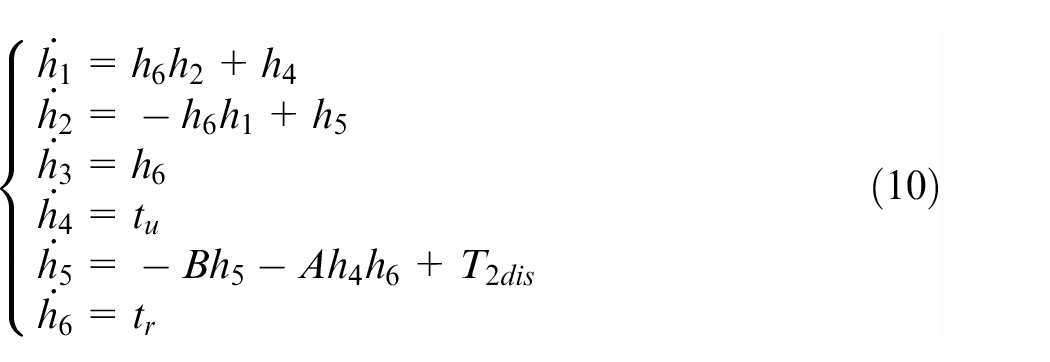
where
Virtual control design based on Lyapunov
After obtaining the motion mathematical model of the USV in the hull coordinate system, the model needs to be further changed by combining the tracking trajectory to change the underactuated model into the fully actuated model. In this section, according to the kinematics model of USV, the tracking trajectory is changed by differential homeomorphism to obtain the reference position change of the trajectory on the hull coordinate system. Then, combined with the Lyapunov criterion, two virtual control input can be obtained, which is the three controlled quantities are transformed into two controlled quantities.
Lyapunov in the hull coordinate system
According to the second method of Lyapunov, the asymptotic stability of the system can be proved. In order to make the system eventually uniformly asymptotically stable, define the Lyapunov function in the inertial coordinate system

where the coordinate error of the USV is

where
Proof
In order to facilitate calculations, we can set

where

Therefore, the original Lyapunov function can be transformed into the Lyapunov function in hull coordinates as

Virtual control quantity design
According to the kinematics model in section “Kinematics model,” let the heading of the reference trajectory be
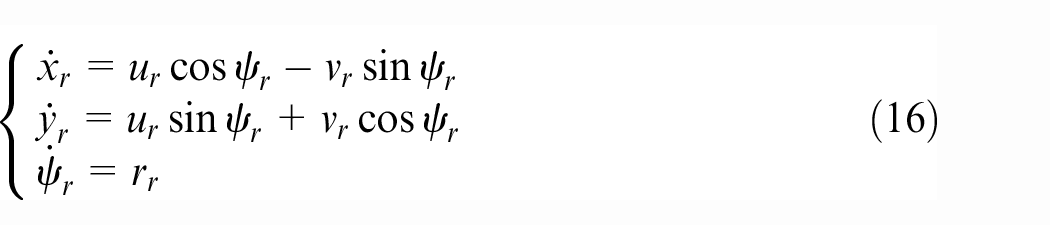
According to equations (7) and (8), transform the coordinates of the reference point to

Carrying out the first-order differentiation on the time of equation (17), we get
Organizing equation (18), we get
From

After taking the time derivative of equation (12), combine equation (20) to obtain

After substituting equations (7) and (19) into equation (21), we have

Let

Because

Taking the USV propulsion speed and heading deviation solution as the virtual control input of the kinematics model sub-controller and

where

Then, substituting

Due to
Let

Because the values of B and A are larger than 0, when

Since the lateral movement of the USV is mainly produced by the angular velocity r, that is
Exponential sliding mode controller
After the virtual controlled quantity is determined as above, the control quantity controls the second derivative of the virtual controlled quantity
Exponential terminal sliding mode
The exponential terminal sliding mode control has a fast asymptotic tracking effect and anti-buffing effect. The first-order dynamic system sliding mode surface25,26 is
In the equation (30),
According to equation (30), when

The convergence time of fast terminal sliding mode control is 26

On the exponential terminal sliding mode, the system is gradual and stable, and at the same time, it takes a faster time to reach the equilibrium point than
Control law design
In order to make the USV’s thruster speed and heading angle reach the desired value, it is necessary to design the auxiliary control laws so that the thruster speed tracking error and the heading angle tracking error eventually approach 0. The thruster speed error and heading angle error are defined as follows

Propulsion control law
design
In order to stabilize the thruster speed error
Taking the time derivative of

Let
For proof

Taking the time derivative of
Because

Therefore, only need to adjust the appropriate
Steering control law
design
Taking the second derivative of

where r is not directly controllable, only
Combining
Let
Proving that

Taking the time derivative of
Because
Numerical simulation
This chapter verifies the effectiveness and robustness of the underactuated trajectory tracking controller proposed in this article through a series of designed numerical simulation experiments. The motion model of underactuated USV, CyberShip II, is selected as the test bench. CyberShip II is a model experimental USV developed by the Norwegian University of Science and Technology. The hydrodynamic parameters of the ship are published by the Norwegian University of Science and Technology. Many scholars, such as Qiu et al., 29 Wang et al., 30 and Hu et al., 31 who study USV verify their theoretical models based on the motion mathematical model of CyberShip II. The structure of CyberShip II is as shown in the Figure 2. 32
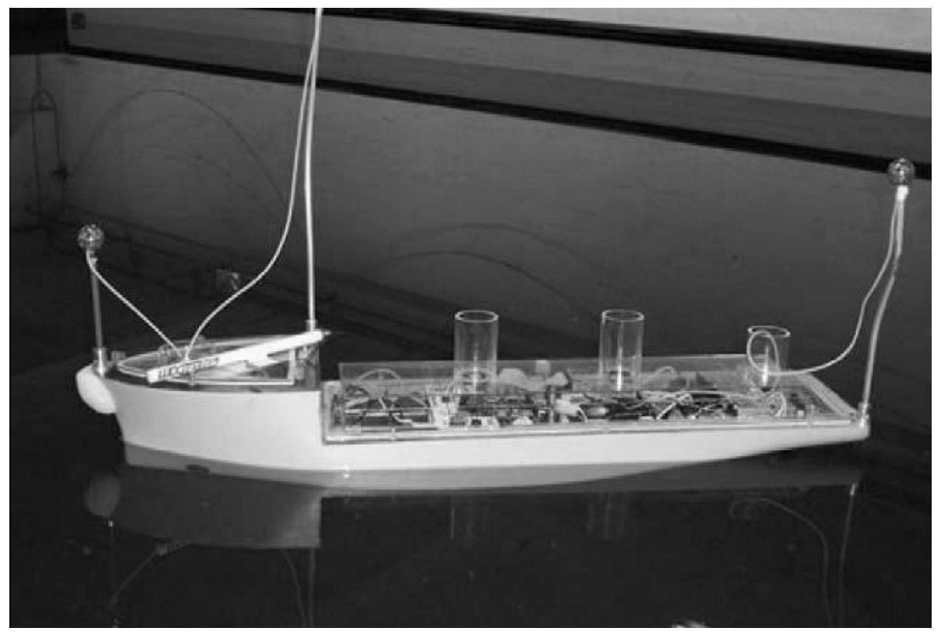
The USV structure employed in numerical test.
According to Qiu et al., 29 the dynamic parameters of the mathematical model of USV, CyberShip II, are set as follows

Set the disturbance of the unmodeled part as below
The disturbance of the external environment is
The resultant force of the total disturbance can be obtained as follows

Simulation is carried out through Simulink in MATLAB platform, and the block diagram of Simulink is designed as shown in Figure 3. The parameters received by the controller of the underactuated USV include the change rate of the reference trajectory, the errors between the motion state of the reference trajectory and that of the agent. The motion state includes dynamic state and kinematic state. The outputs

Simulink block diagram of the numerical test.
The parameters of the exponential dynamic sliding mode controller designed for

The parameters of the exponential dynamic sliding mode controller designed for

The limit values of the output control laws

In the simulation, in order to verify the trajectory tracking effect of the controller, a linear trajectory and a sine trajectory are set for verification. Their mathematical expressions are equations (49) and (50), respectively


In order to prove that the designed exponential dynamic sliding mode controller has a better convergence effect, compare it with the global integral sliding mode controller designed by Sun et al., 27 and set the initial state of the USV

The tracking trajectory of the exponential sliding mode controller used in this article and the ordinary sliding mode controller on the linear trajectory under the condition of no disturbance are shown in Figure 4. It can be seen from the figure that the exponential sliding mode controller and global integral sliding mode controllers all have good tracking effect on straight trajectories under the condition of no disturbance. However, it can be seen from the tracking error diagram in Figure 5 that compared with the global integral sliding mode controller, the exponential sliding mode controller has a better tracking effect.
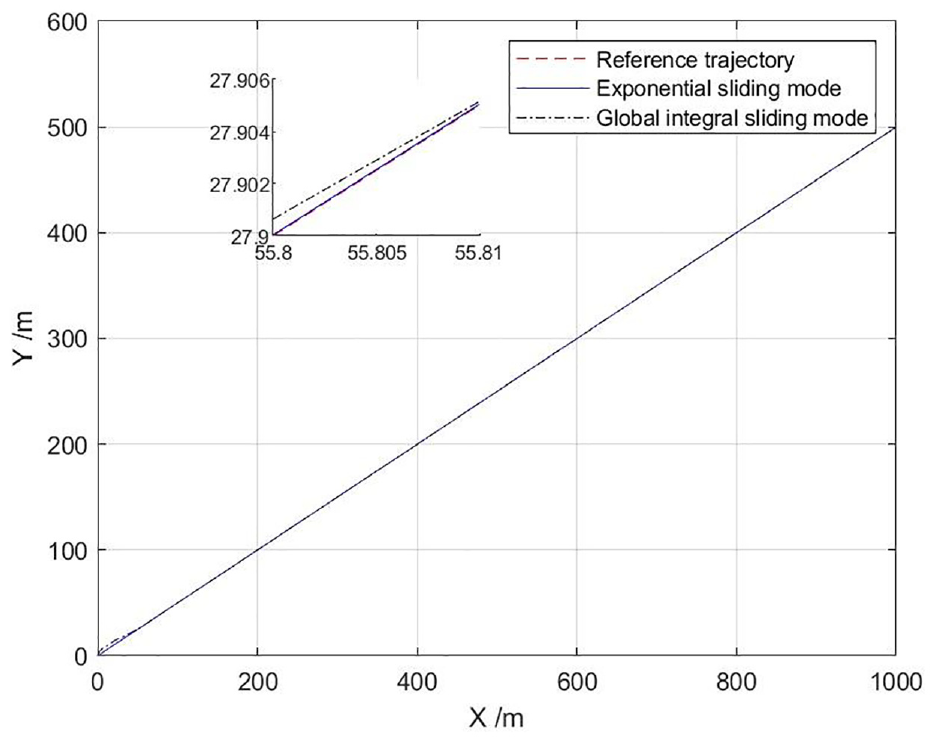
Tracking performance results of line trajectory without disturbances.
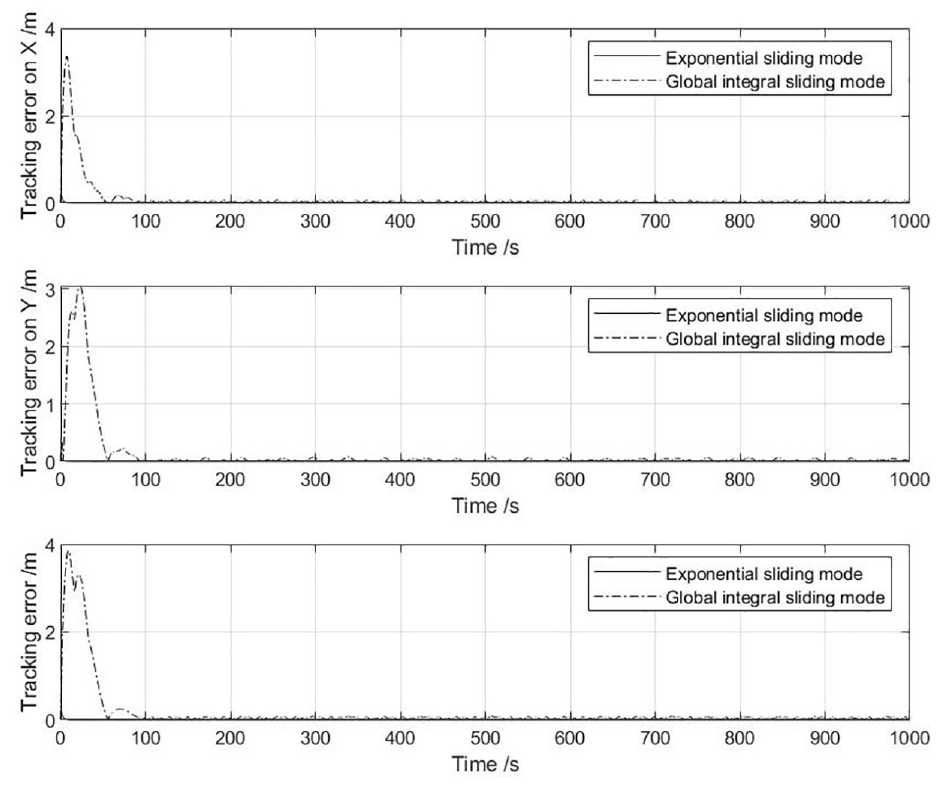
Tracking error result of line trajectory without disturbances.
The tracking trajectory of the linear trajectory by the exponential sliding mode controller and the ordinary sliding mode controller with the disturbance situation setting as mentioned above are shown in Figure 6. After the disturbances setting, compared with the exponential sliding mode controller and the global integral sliding mode controller under the condition of no disturbance, the agent suffers different degrees of influence on the tracking of the trajectories. No matter the trajectory diagram in Figure 6 or the tracking error diagram in Figure 7, all can be clearly seen that the exponential sliding mode controller has better anti-interference ability than the global integral sliding mode.
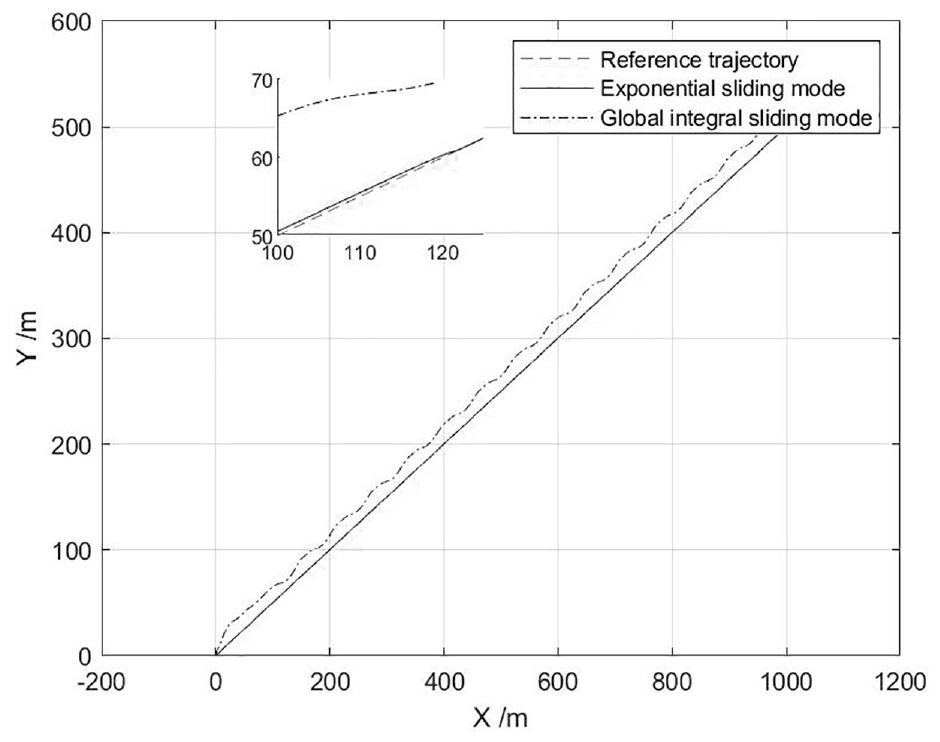
Tracking performance results of line trajectory without disturbances.
Tracking error result of line trajectory without disturbances.
It can be seen from Figures 8 and 9 that both the exponential sliding mode controller and the global integral sliding mode controller have good tracking effects on the sine curve in the absence of disturbances. But the exponential sliding mode controller shows the obvious advantages on tracking ability.
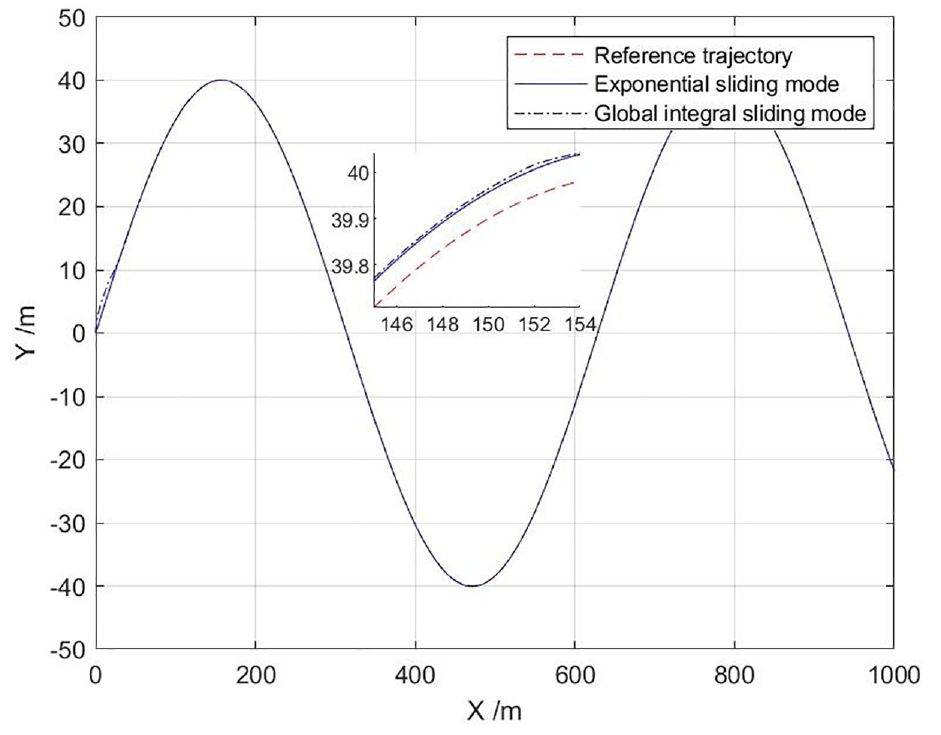
Tracking performance results of sine trajectory without disturbances.
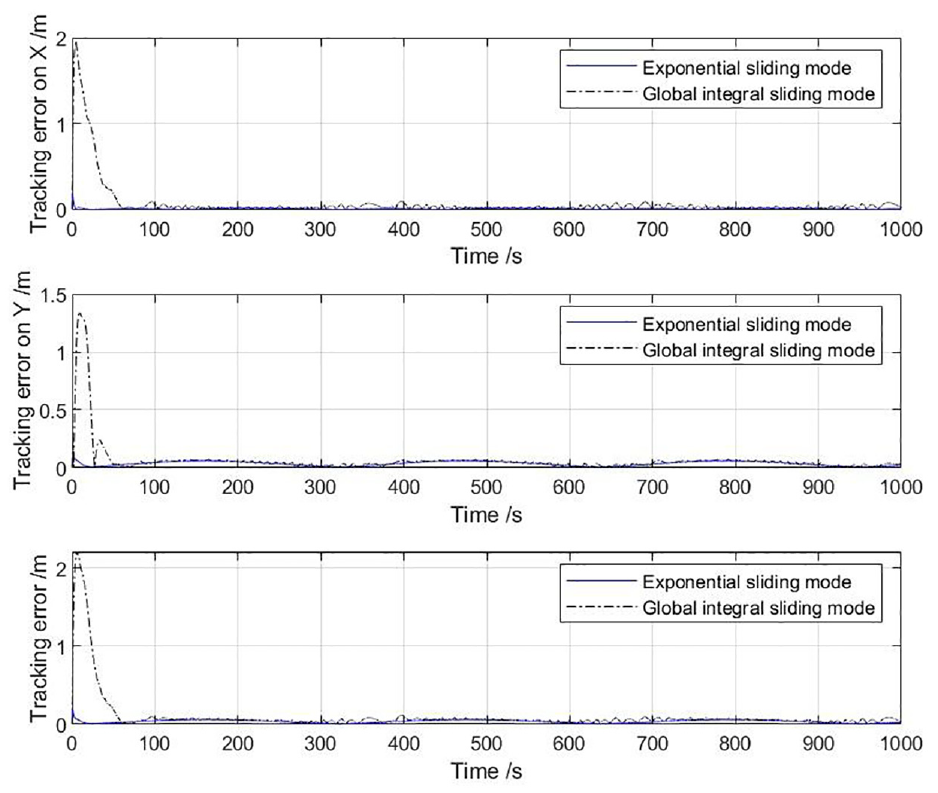
Tracking error results of sine trajectory without disturbances.
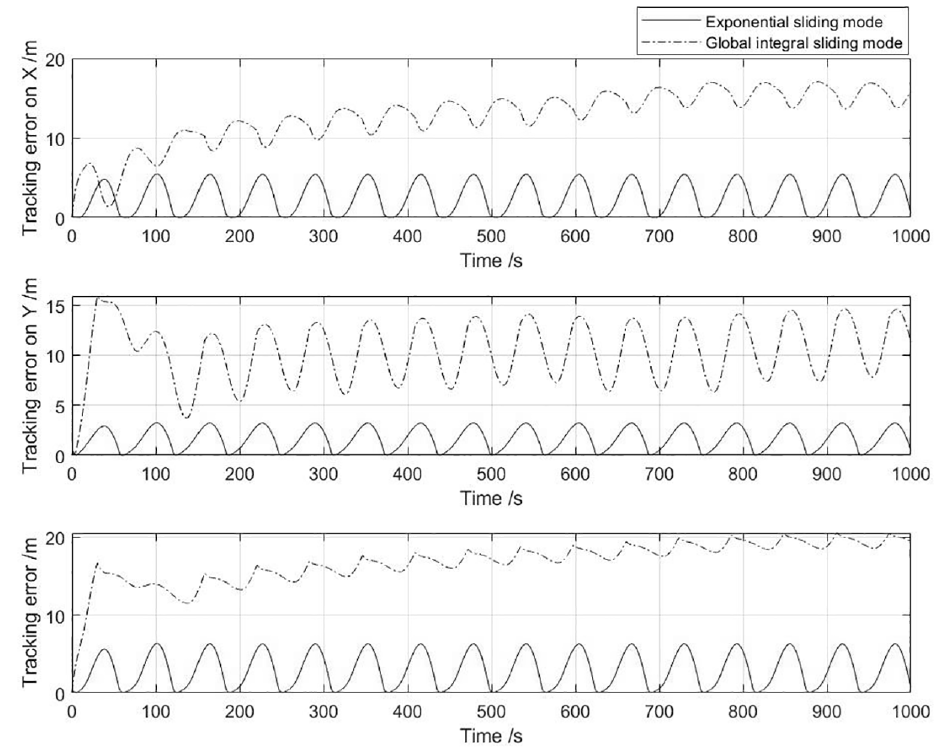
After setting the disturbances, it can be seen from Figures 10 and 11 that the global integral sliding mode controller has a large error in the tracking of the sine curve, while the exponential sliding mode controller makes a rapid adjustment after a large error to make the error quickly converges to 0. For exponetial sliding mode, the error on the x axis is not dominant, but the error on the y axis and the total error are significantly better than the global sliding mode. The exponential sliding mode controller shows a better robust effect.
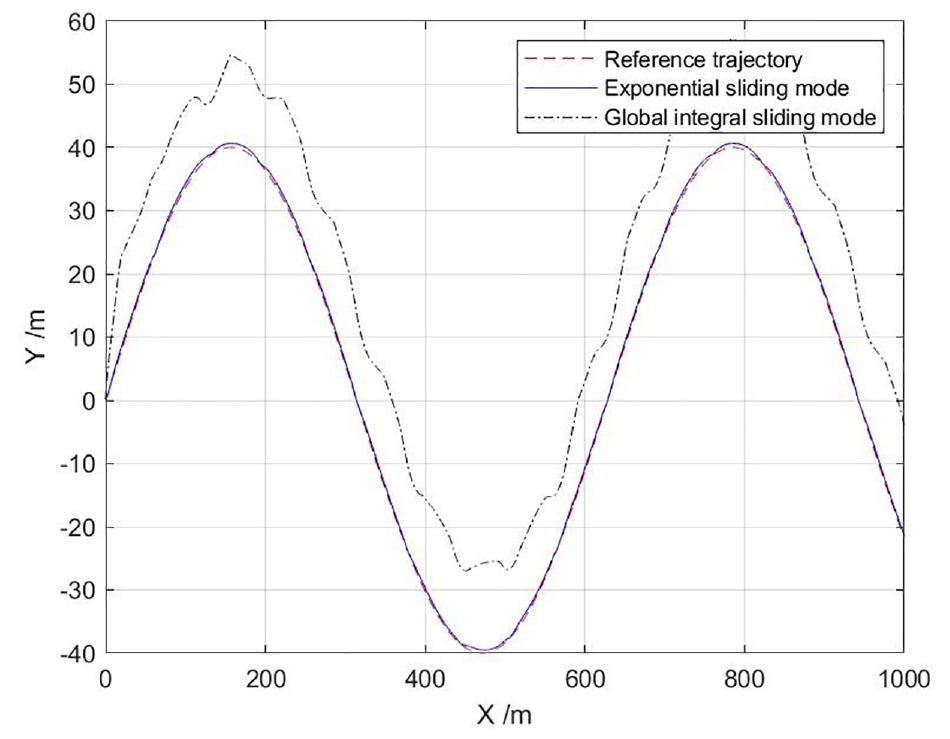
Tracking performance results of sine trajectory with disturbances.
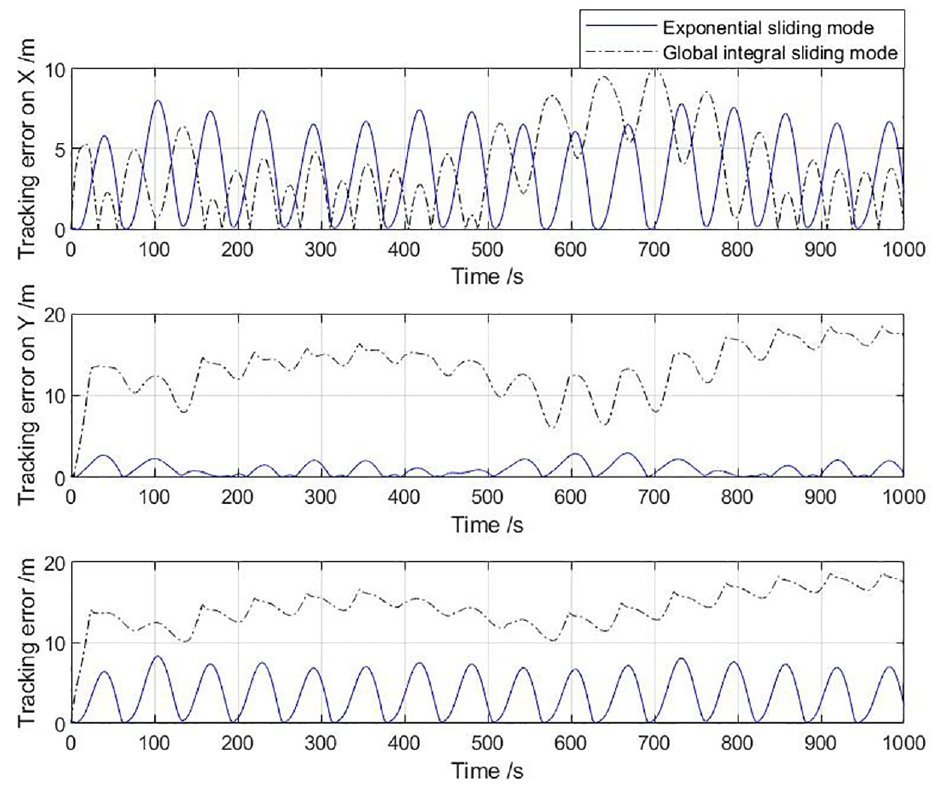
Tracking error results of sine trajectory with disturbances.
Figures 12 and 13, respectively, show the output control force and torque changes of the USV under the disturbance condition on the line trajectory and sine trajectory. The results show that the control outputs
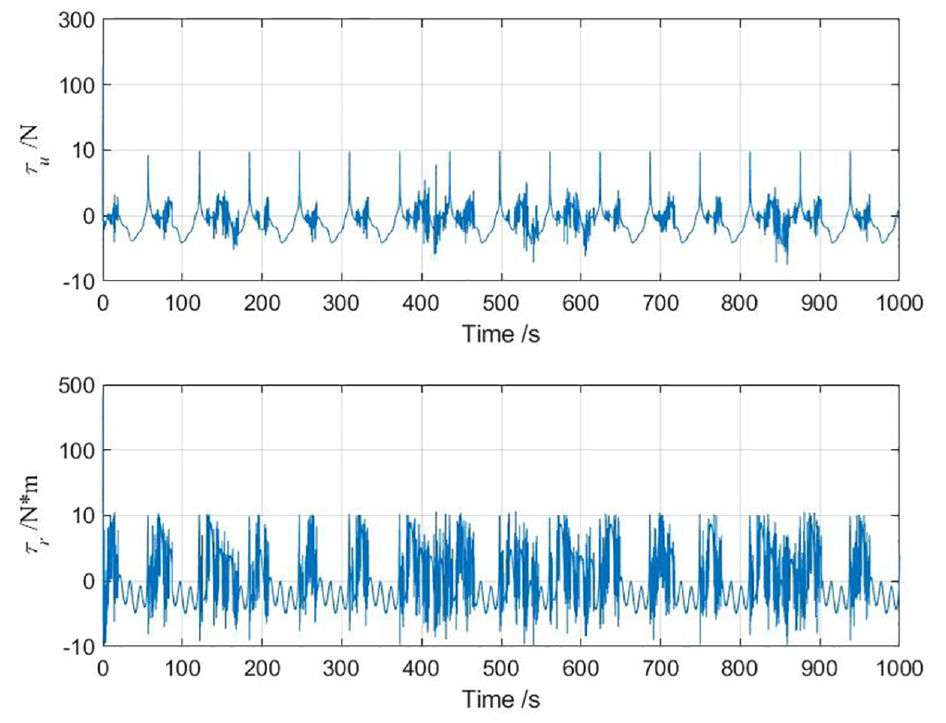
The output of the line trajectory tracking controller with disturbances.
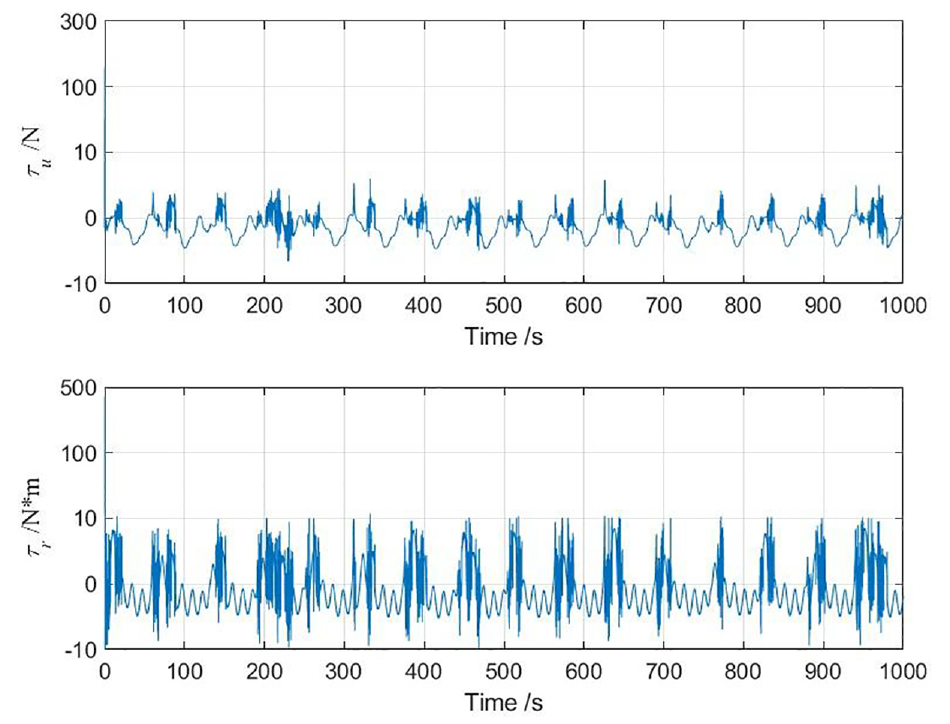
The output of the sine trajectory tracking controller with disturbances.
Conclusion
Although the tracking controller proposed in this article is utilized, the trajectory tracking control of the USV can be realized. Based on the Lyapunov function, the virtual control variables are determined by the backstepping method to be the propulsion control and the heading deviation, respectively, then the exponential mode sliding controller is analyzed, and the second order is designed by deriving the second order of the exponential mode sliding controller. The exponential sliding mode surface is solved to obtain the control laws, and their stability is analyzed through the Lyapunov function. In order to further prove the effectiveness and robustness of the controller, the tracking simulation experiment of the linear trajectory and the sinusoidal trajectory with two different curvature trajectories are carried out, and the simulation is also performed under the unmodeled disturbance and the external environment disturbance. By comparing with the global integral sliding mode controllers, the simulation results prove that the trajectory tracking controller of the USV proposed in this article is more superior, which supplements the related research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed the receipt of the following financial support for the research, authorship, and/or publication of this article: This article is supported by the results of the research project funded by the Shanghai High-level local University Innovation team (Maritime safety and security)/Shanghai Municipal Science and Technology Commission Local College Capacity Building Project (22010502000, 23010501900).
Data availability
Data sharing is not applicable to this article as no data sets were generated or analyzed during the current study