
Abstract
This study presents a modular pneumatic actuator system for soft robotics, designed to improve reconfigurability, adaptability, and deployment efficiency. The system consists of a standardized and extensible set of functional modules, including elongation, bending, twisting, and stimuli-responsive modules, each systematically characterized by its pressure–deformation behavior. These modules can be (re)assembled according to task-specific requirements, enabling the rapid construction of soft robotic platforms with customized actuation strategies. We demonstrate the versatility of this approach through three representative systems: a bioinspired trunk-like robot, a soft crawling robot, and a reconfigurable three-fingered gripper. Each example highlights key advantages of modularity, such as structural adaptability, environmental responsiveness, and object-specific grasping. The results show that this strategy supports scalable, low-cost, and reusable actuator designs.
Keywords
Introduction
Soft robots have attracted increasing attention due to their ability to interact safely with unstructured environments, as well as their high compliance and adaptability (He et al., 2019; Li et al., 2021; Qing et al., 2024; Tolley et al., 2014; Wehner et al., 2016). These features make them well-suited for applications in healthcare (Cianchetti et al., 2018; Nguyen and Zhang, 2020; Rich et al., 2018; Wang et al., 2024), manufacturing (AboZaid et al., 2024; Li et al., 2023; Zhang et al., 2024), and operations in harsh environments (He et al., 2023; Kulkarni et al., 2025; Xie et al., 2023; Zhang et al., 2023b), where traditional rigid robots often face limitations. In soft robotic systems, actuators play a central role, as they directly determine the motion and performance of the robot. Among various actuation methods, pneumatic actuators have been widely adopted (Geer et al., 2020; Li et al., 2022; Xavier et al., 2022; Zhang et al., 2021). They offer advantages such as tunable stiffness, high power-to-weight ratio, and ease of fabrication. Their flexibility enables complex deformation modes (Guo et al., 2021; Jiao et al., 2024; Jin et al., 2020; Zou et al., 2021) with safe human interaction (Decker et al., 2022; Tawk et al., 2019; Zhang et al., 2023c). However, most existing pneumatic actuators face key limitations: Their motion modes are typically fixed during fabrication and cannot be modified afterward. Many are designed for specific tasks, lacking any reprogrammability that would allow them to be adaptable to changing conditions or repurposed for other tasks.
A modular design strategy offers a promising solution to the challenges of adaptability and reusability by enabling actuator components to be rearranged, reused, and adapted across different robotic systems. Prior studies have made valuable contributions by identifying core deformation modes—such as elongation, bending, and twisting—and designing functional modules tailored to each (Belding et al., 2018; Connolly et al., 2015, 2017). This approach has significantly improved the efficiency of soft robotic design and fabrication (Fang et al., 2025; Kurumaya et al., 2018; Lee et al., 2018; Morin et al., 2014; Zhang et al., 2023a), laying the groundwork for modular actuator systems. However, many of these modules are designed for fixed functions and cannot autonomously adapt their behavior in response to external stimuli. To complement advances in modular functionality, researchers have also explored various connection mechanisms to improve structural integrity and enable reconfiguration. Screw-based fasteners and interlocking structures are commonly used to provide reliable mechanical coupling between modules (Dong et al., 2022; Lee et al., 2018; Yang et al., 2022). These designs offer strong and precise connections, particularly suitable for high-force applications. Our initial actuator prototypes also adopted a screw-based flange interface, which we used for early characterization and demonstration. However, screw-based systems can be time-consuming to assemble and susceptible to misalignment. In contrast, magnetic connectors have emerged as a practical alternative, enabling rapid, tool-free attachment and detachment of modules (Knospler et al., 2024; Lee and Cho, 2017; Vergara et al., 2017). These studies demonstrate the potential for faster reconfiguration, especially for exploratory, adaptive, or user-facing systems. Nevertheless, existing approaches often focus on either connector design or specific actuation modes. A unified, scalable platform that integrates magnetic connection, diverse deformation modes, and environmental responsiveness remains largely unexplored.
Building on these prior contributions, we present a modular pneumatic actuator system that combines multiple strategies into a unified, reusable platform. The system includes two types of modules: (i) core functional modules that produce predefined deformation modes (e.g. elongation, bending, and twisting), and (ii) stimuli-responsive modules that adapt their actuation behavior in response to environmental cues such as light or heat. For example, a responsive module may elongate under ambient conditions but bend when exposed to illumination, enabling motion adjustment without electronic control. All modules share a standardized structural design, ensuring compatibility and interchangeability across configurations. Their pressure–response behaviors are systematically characterized across multiple fiber layouts. To enhance usability, we subsequently developed a magnet-based flange that offers airtight sealing, adjustable angular alignment, and much faster assembly. Comparative leakage tests confirm that its sealing performance is similar to screw-based designs, validating its potential for future deployments. While modular actuation, magnetic connectors, and stimuli-responsive control have each been explored independently, our work integrates these components into a cohesive hardware library. We demonstrate its versatility through three soft robotic implementations: a trunk-like robot with programmable bending, a crawling robot that reroutes based on light input, and a reconfigurable gripper that adapts to object shape. Rather than introducing entirely new mechanisms, our goal is to synthesize proven strategies into a scalable, easy-to-use platform for building adaptive soft robots.
Results
Overview of the modular pneumatic actuator system
Figure 1 presents an overview of the proposed modular pneumatic actuator system. It includes four standardized module types: three core functional modules (elongation, bending, and twisting) and one stimuli-responsive module that adapts to environmental input (Figure 1(a)). Each module is defined by its deformation mode, design parameters, and pressure–response behavior. While the core modules provide motion-specific outputs, the responsive module extends functionality by switching between modes based on light or heat.
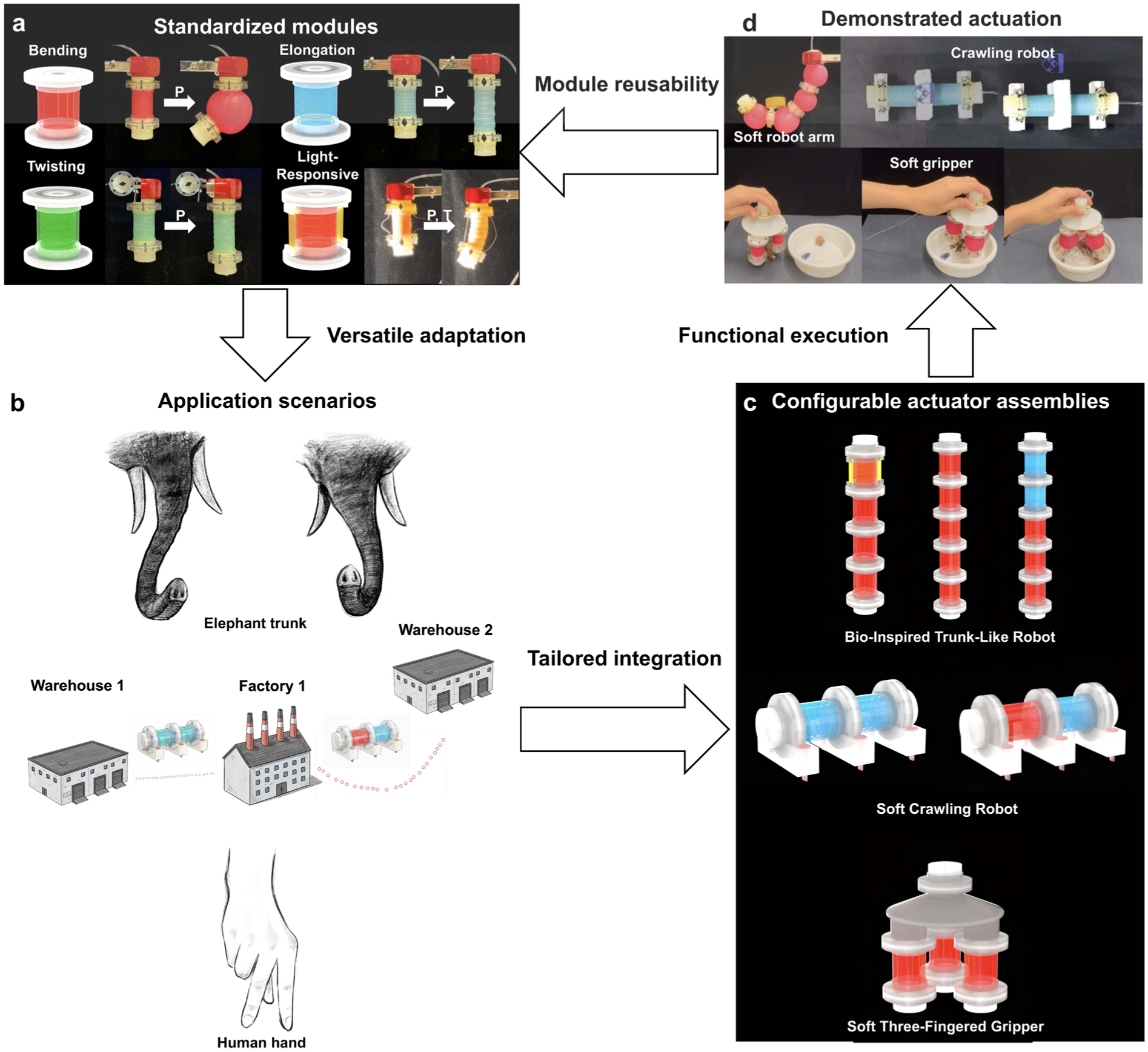
Design framework and task-driven configuration strategy of the modular pneumatic actuator system: (a) the system consists of four standardized actuator modules: three core functional modules (elongation, bending, and twisting) and one stimuli-responsive module capable of switching deformation modes in response to thermal or optical stimuli, (b) a range of task-specific requirements and application scenarios motivate the need for flexible and reconfigurable actuator behaviors, such as adaptive manipulation or environment-responsive locomotion, (c) modules can be selectively combined into custom assemblies tailored to specific functional goals, and (d) the resulting actuator configurations are validated through representative soft robotic demonstrations, highlighting modularity-enabled task execution and adaptability.
These modules serve as configurable building blocks for soft robots tailored to different application scenarios. As shown in Figure 1(b), we illustrate three representative examples: a trunk-like manipulator for biomimetic motion, a cargo transporter that reroutes based on light, and a soft robotic hand for grasping delicate objects. By selecting and combining modules, users can build actuator assemblies with distinct motion capabilities (Figure 1(c)). These assemblies can then be deployed in functional robots, including a reconfigurable trunk-like arm, a stimulus-responsive crawling robot, and a soft gripper (Figure 1(d)). Together, these examples demonstrate the system’s versatility, reusability, and potential for adaptation across diverse soft robotic applications.
Design and characterization of core functional modules
The modular pneumatic actuators developed in this study include three core deformation modes: elongation, bending, and twisting. These core functional modules are designed to generate predefined motion under pneumatic input without relying on environmental cues. Each actuator adopts a McKibben-type structure and incorporates embedded Kevlar fibers to introduce anisotropic deformation (Connolly et al., 2015, 2017; Guan et al., 2020; Wang et al., 2017). The fiber orientation determines the specific actuation mode.
The actuators are fabricated using Ecoflex-0030 and Dragon Skin-0010 (Smooth-On, Inc.) via a two-step molding process to ensure accurate fiber placement and structural consistency. After fabrication, each module is connected using 3D-printed magnetic flanges with embedded permanent magnets. These flanges provide reliable mechanical coupling, while silicone sealing rings inserted between modules maintain an airtight seal and allow free angular alignment. Mechanical characterization and robotic demonstrations in this study were conducted using the earlier screw-flange design, which provides a robust baseline for comparison.
Each deformation type is realized through a specific fiber configuration, following the design principle of McKibben actuators. The bending module (Figure 2(a)) uses longitudinally aligned fibers positioned along half of the actuator’s circumference. Upon inflation, this asymmetric reinforcement induces curvature toward the fiber-reinforced side. In the elongation module (Figure 2(b)), circumferential Kevlar fibers are arranged transversely and evenly distributed along the actuator’s longitudinal axis. This configuration restricts radial expansion and promotes axial elongation when pressurized. The twisting module (Figure 2(c)) contains a single Kevlar fiber helically wound around the actuator body, coupling axial elongation with torsional deformation. All core modules share the same external dimensions to ensure compatibility and interchangeability across different designs (Figure 2(d)).
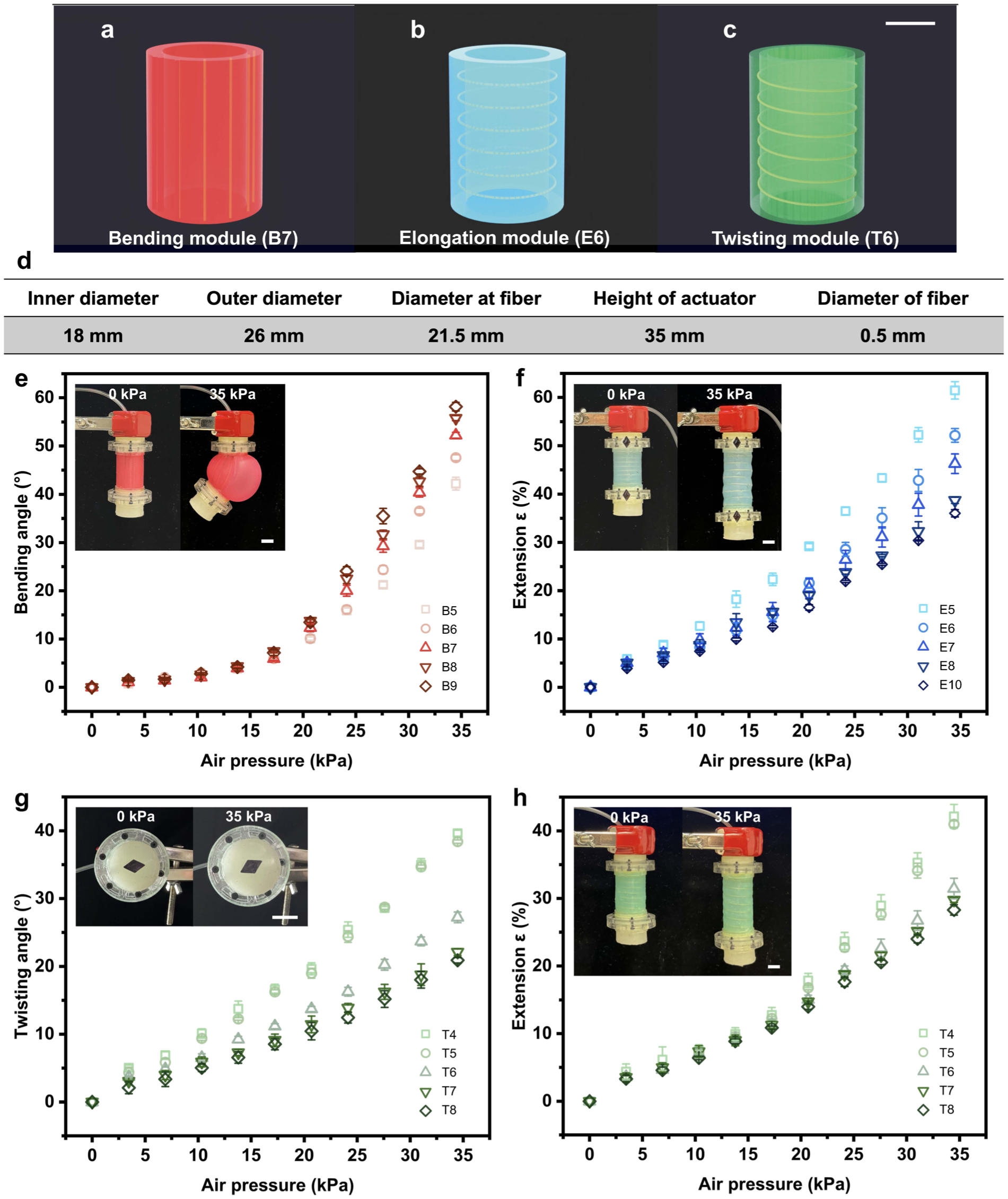
Design and characterization of fiber-reinforced core functional modules: (a) bending module: vertically aligned fibers positioned along half the circumference induce asymmetric deformation under pressure, (b) elongation module: circumferentially distributed Kevlar fibers constrain radial expansion, enabling controlled axial elongation, (c) twisting module: a single helically wound fiber transforms axial expansion into torsional deformation, (d) uniform geometric dimensions across all module types ensures compatibility and interchangeability, (e) pressure–bending angle response for bending module configurations B5 to B9, (f) Pressure–strain response for elongation modules E5 to E10, AND (g and h) Twist angle and axial strain versus pressure for twisting modules T4 to T8. Each curve represents the average of six trials across three independently fabricated samples; scale bars: 1 cm.
To validate the sealing performance of the magnetic flange design, we conducted pressure retention tests on single-module actuators equipped with two end caps. In each trial, 40 ml of air was injected manually, and internal pressure was monitored over a 3-min period. As shown in Supplemental Figure S2, actuators sealed with magnet flanges retained approximately 56% of the initial pressure after 3 min, indicating moderate leakage. To further assess sealing performance, we compared magnet flanges with conventional screw flanges and found that magnet flanges performed comparably or even slightly better. These results confirm that the later-developed magnetic flanges are suitable replacements for screw-based connectors, particularly for scenarios requiring fast reconfiguration.
This 3-min test interval was chosen based on two practical considerations. First, in most soft robotic systems, air is continuously supplied by external pumps, and the leakage rate is significantly lower than the supply rate, ensuring stable and controllable actuation. Second, in untethered applications, tasks are typically completed in short, discrete bursts (Nature, 512, 387–390, (2014); Soft Robotics, 2(1), 7–25, (2015); Science Robotics, 6(51), eaay2627, (2021); Chem. Eng. J., 451, 138794, (2023)). Maintaining more than 50% of initial pressure for 3 min is therefore sufficient for most envisioned use cases. As discussed later, more advanced fabrication techniques such as DLP-based elastomer printing or precision molding may further improve sealing performance.
To characterize the pneumatic response of the modules, each was assembled with a closed cap and a perforated cap, mounted vertically, and tested under controlled pressurization from 0 to 5 psi (35 kPa). For bending modules, the bending angle was recorded as the primary deformation parameter. For elongation modules, axial strain was recorded. For twisting modules, both axial strain and twist angle were measured. To systematically study the influence of fiber configuration, we fabricated elongation modules with 5, 6, 7, 8, and 10 circumferential fibers (labeled E5, E6, E7, E8, E10), with center-to-center fiber spacing of 5.83, 5.0, 4.38, 3.92, and 3.24 mm, respectively; bending modules with 5–9 longitudinally oriented fibers (B5, B6, B7, B8, B9), with fiber angular spacing of 45°, 36°, 30°, 25.7°, and 22.5°; and twisting modules, each containing a single helical fiber with 4 to 8 turns (T4, T5, T6, T7, T8), corresponding to fiber helix angles of 7.35°, 5.89°, 4.92°, 4.22°, and 3.69°, respectively.
We then evaluated the effect of material hysteresis and long-term durability by conducting up to 200 continuous inflation–deflation cycles on representative B9 (bending), E7 (elongation), and T8 (twisting) modules. As shown in Supplemental Figure S3(a–d), the first cycle exhibits slight hysteresis, with deflation producing greater deformation than inflation at the same pressure, consistent with the viscoelastic behavior of silicone rubber. To assess multi-cycle effects, we compared the deformation responses at the 1st, 10th, 50th, 100th, and 200th cycles (Supplemental Figure S3(e–h)). The results reveal minor softening during early cycles, but the deformation–pressure behavior converges rapidly and remains highly consistent across subsequent cycles. All modules retained reliable and repeatable deformation up to 200 cycles, indicating good short-to-medium-term robustness. Beyond 200 cycles, occasional failure modes began to emerge during extended testing. Two representative failure mechanisms were observed: (1) delamination between the soft actuator body and the harder 3D-printed flange due to adhesive fatigue, and (2) internal detachment between the embedded Kevlar fibers and surrounding silicone matrix. These failures typically occurred between 300 and 500 cycles.
Having confirmed the repeatability and structural reliability of our modules, we next characterized the pressure–deformation behavior across all configurations. For each type, three identical samples were tested with two inflation cycles per sample (allowing sufficient relaxation time between cycles), yielding six datasets in total. The results are summarized in Figure 2(e) to (h), with further details provided in the Materials and Methods section. As shown in Figure 2(e), bending modules respond similarly regardless of the number of fibers at low pressures. However, the responses diverge as pressure increases, due to localized buckling on the unreinforced side. As a result, modules with higher fiber counts produce greater bending angles at high pressures. Representative images are provided in Supplemental Figure S4. For elongation modules (Figure 2(f)), higher fiber counts result in smaller axial strains, as increased constraint limits longitudinal deformation (Supplemental Figure S5). The twisting modules (Figure 2(g) and (h)) exhibit a coupled response between axial elongation and twist. As the number of fiber turns increases (T4 to T8), the helical fiber adopts a smaller pitch angle, aligning more circumferentially around the actuator. This orientation constrains both axial and torsional deformation during inflation, resulting in reduced elongation and smaller twist angles. In other words, lower pitch angles impose stronger geometric constraints on the actuator, limiting its overall deformation. These trends are consistent with theoretical predictions and experimental observations (see Supplemental Figure S6).
In addition to deformation performance, we also evaluated the force output of both bending and elongation modules under increasing pressure (Supplemental Figure S7). For bending modules, the blocked-end force increases with fiber count, as stiffer reinforcement resists inflation and amplifies net output. At around 20 kPa, the B9 module generated the highest force (5 N), while the B5 module produced approximately 70% of that value. Note that bending module measurements were limited to 20 kPa, as higher pressures caused the actuator tip to deflect at an angle relative to the testing machine’s crosshead, introducing misalignment and reducing force accuracy. For elongation modules, force output increased consistently with pressure across all fiber counts, though differences between configurations were relatively minor.
Analytical modeling of core functional modules
To explain the effect of fiber quantity on actuator deformation, we performed a theoretical analysis based on strain energy minimization. We modeled the deformation of fiber-reinforced hyper elastic balloons under the assumptions of cylindrical geometry, incompressibility, and internal pressure-driven deformation. Among the three core module types, the twisting module was selected for analysis as it involves both elongation and torsion while best satisfying these assumptions. Notably, the elongation module can be regarded as a special case of the twisting module under symmetric conditions.
We modeled the core functional module as consisting of three concentric layers. The inner and outer layers are composed solely of silicone elastomer and are treated as simple incompressible neo-Hookean materials, with strain energy density given by:

where
The middle layer is a composite structure made of Kevlar fibers embedded in silicone rubber. Its total strain energy density is expressed as:

where

where

For an incompressible neo-Hookean material, we assume
The deformation gradient in cylindrical coordinates becomes:

Here,
For the layered pneumatic actuator with quasi-static equilibrium and no body forces (b = 0), the strain-energy-based Cauchy stress can be derived into the following governing equations:
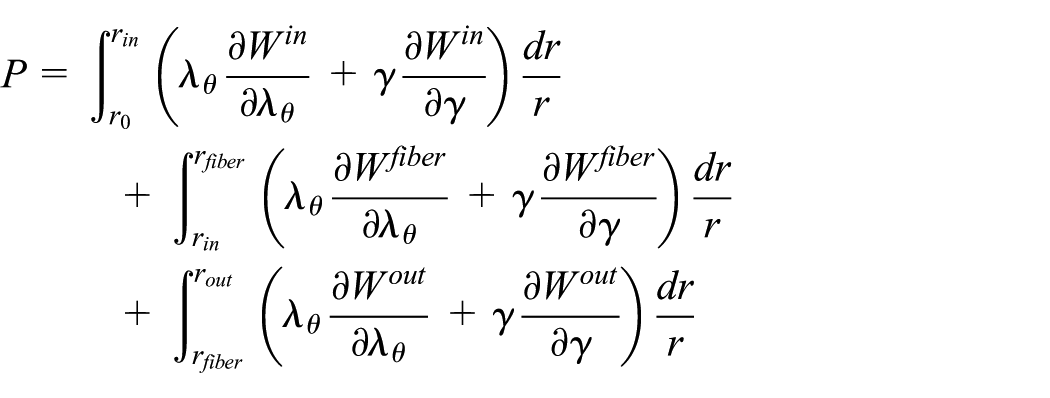
where
Since there is no other external axial force or external axial moments applied to the tube, the axial loading only comes from the inner pressure. The net axial force
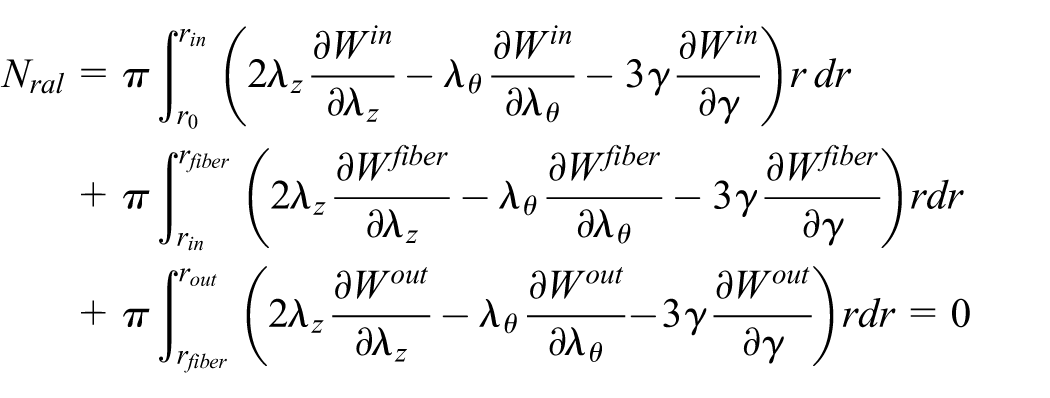
By substituting material and geometric parameters into the governing equations, we solved the system numerically in MATLAB to obtain predicted relationships between input pressure and the resulting axial elongation and twist for twisting modules with different fiber configurations. The analytical results are compared with experimental data in Figure 3(a) and (b).
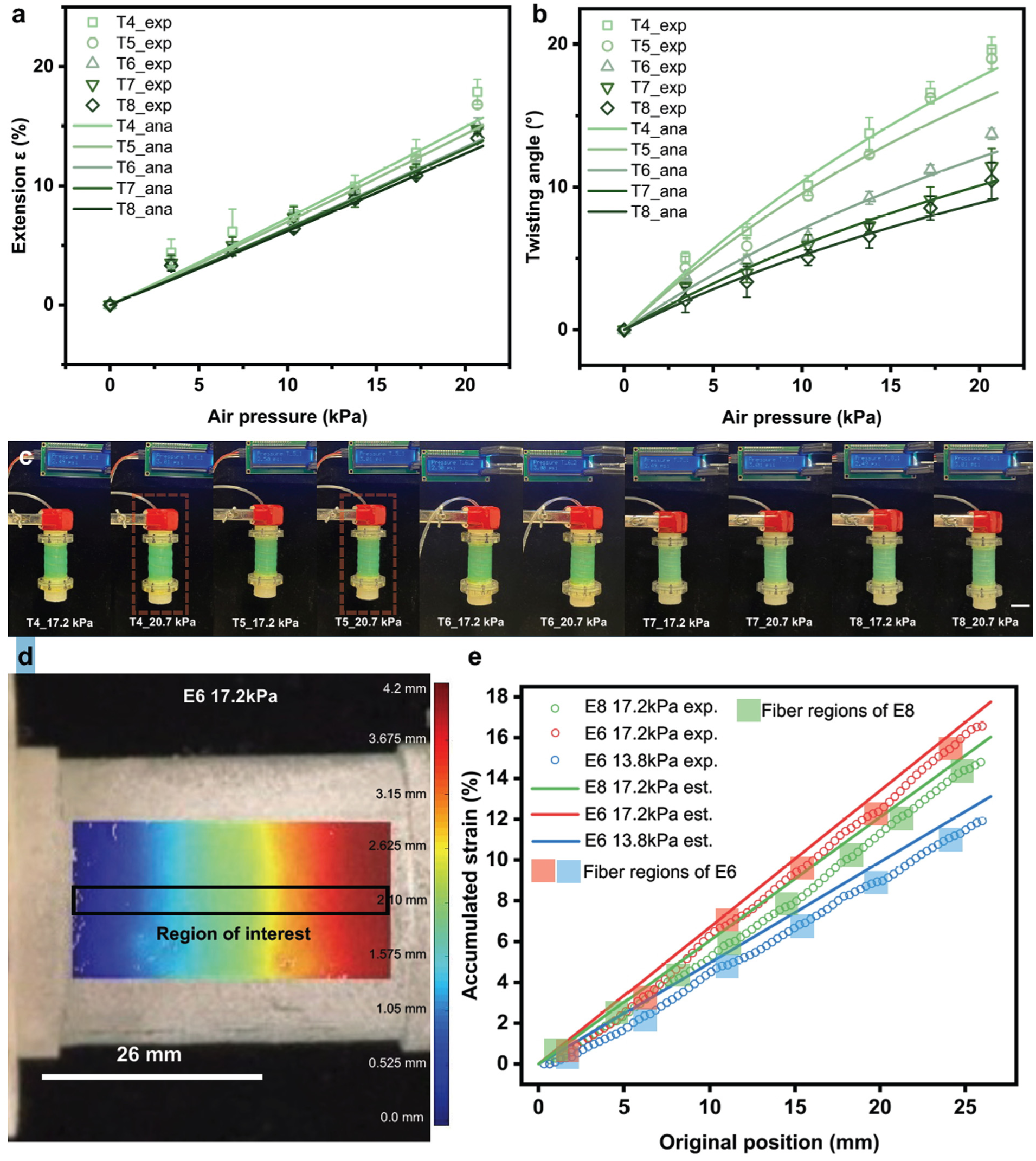
Modeling and high-resolution characterization of core functional modules: (a) axial elongation and (b) twist angle as a function of input pressure for twisting modules with different fiber windings. Experimental results (markers) are compared with analytical model predictions (curves), (c) images of representative twisting modules at 17.2 and 20.7 kPa, showing deviation from cylindrical shape at higher pressure, (d) digital image correlation (DIC) displacement map of an E6 elongation module at 2.5 psi, with the defined region of interest highlighted, and (e) column-averaged axial strain profiles extracted from E6 and E8 modules. Solid lines indicate linear estimates based on fiber-free regions, while hollow markers represent experimental data. Shaded areas denote regions influenced by embedded fibers; scale bars: 2 cm.
In the low-pressure regime (below 20 kPa), the model accurately captures the deformation trends: as the number of helical fiber turns increases, both axial elongation and twist angle decrease under the same pressure. This behavior reflects the increasing geometric constraint imposed by denser fiber reinforcement, in agreement with experimental observations.
However, as the input pressure increases further, the actuator geometry begins to deviate from the ideal cylindrical form assumed in the model. For example, noticeable bulging occurs at 20 kPa in the T4 and T5 configurations, as highlighted by the red dashed boxes in Figure 3(c). These geometric deviations introduce nonlinear effects and localized buckling that are not captured by the current formulation, resulting in larger discrepancies between model predictions and experimental results at higher pressures. This is evident in the 20 kPa data points in Figure 3(a) and (b).
Despite these limitations, the analytical model provides a physically grounded and tractable framework for understanding how fiber orientation influences actuator deformation. It offers reliable predictive insight in the low-pressure regime and serves as a basis for future improvements, such as incorporating geometric nonlinearities or integrating data-driven correction terms. A full derivation of the model, along with all material and geometric parameters used, is provided in the Supplementary Information.
High-resolution DIC-based strain mapping of core functional modules
To further quantify the role of fiber reinforcement in modulating actuator deformation, we employed digital image correlation (DIC) to measure localized strain fields (Blaber et al., 2015). Elongation modules were selected as a representative case due to their relatively simple and symmetric deformation.
A representative displacement gradient map for an E6 elongation module under 2.5 psi is shown in Figure 3(d). The region of interest (ROI) was defined as a narrow strip centered on the front surface of the actuator to minimize perspective distortion and ensure consistency across samples. Detailed experimental procedures, including the pressure step protocol and image capture settings, are described in the Supplementary Information. From the measured displacement field, we computed column-averaged values to generate accumulated strain profiles along the length of the actuators.
The resulting strain–position curves are shown in Figure 3(e), including measurements from the E6 module at 2.0 and 2.5 psi and the E8 module at 2.5 psi. For comparison, we also plotted idealized linear trends derived from fiber-free regions, assuming uniform expansion in the absence of constraint. These baselines (solid lines) are overlaid with experimental data (hollow markers). Shaded bands have been added to the plot to indicate the location of the embedded Kevlar fibers. Within these shaded regions, strain accumulation slows significantly, forming distinct plateaus that confirm the local suppression of axial deformation by the Kevlar fibers. Furthermore, the E8 module, which contains more fibers than the E6 module, exhibits more plateaus, indicating stronger reinforcement. These findings support the conclusion that fiber configuration plays a key role in controlling localized strain behavior in modular actuators.
Although full-field DIC analysis was not performed on the bending modules, similar principles apply. The fiber-reinforced side undergoes less expansion than the unreinforced side, inducing curvature. A higher fiber count enhances this asymmetry, resulting in larger bending angles, consistent with the trends shown in Figure 2(e).
Design and characterization of the stimuli-responsive module
The core modules produce fixed deformation patterns under pneumatic input. As a proof of principle, we developed a stimuli-responsive module that can adapt its deformation mode in response to environmental stimuli. Under standard conditions, the module behaves like an elongation actuator, but it transitions to act like a bending actuator when exposed to elevated temperature or intense light.
This responsive module is based on the E6 elongation actuator and modified by adding two flange-mounted slots for attaching carbon nanotube–doped liquid crystal elastomer (CNT-LCE) strips (He et al., 2023, 2024; Kim et al., 2019; Figure 4(a)). The length of the CNT-LCE strips is matched to the actuator’s fully extended length at 5 psi. In the absence of external stimuli, the strips remain inactive and do not affect the actuator’s deformation. However, when exposed to heat or light, the stimulated CNT-LCE strip contracts, creating an asymmetric constraint. This causes the actuator to bend toward the stimulus, enabling a simple form of environmental sensing and actuation. Fabrication and characterization details of the CNT-LCE material are provided in the Materials and Methods section.
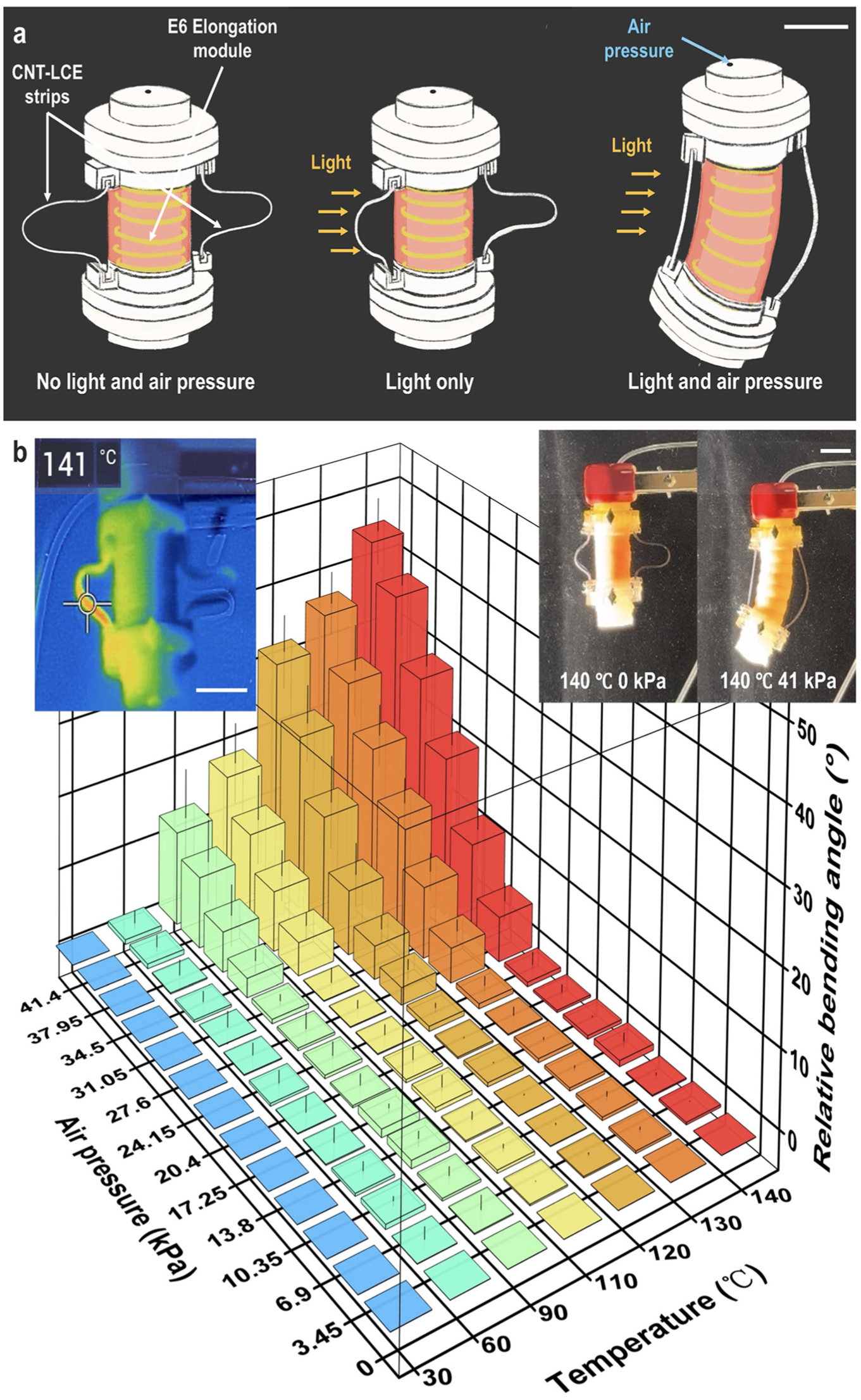
Design and characterization of the stimuli-responsive module: (a) schematic illustration of the responsive module, which consists of an E6 elongation actuator integrated with two CNT–LCE strips mounted via custom magnetic flanges. Upon thermal or optical activation, asymmetric contraction of the CNT–LCE induces bending toward the stimulus direction, and (b) pressure–bending angle response at different activation temperatures. Elevated temperatures lead to increased bending under the same pneumatic input; scale bar: 2 cm.
Three identical responsive modules were fabricated and mounted vertically. Internal pressure was controlled using a pre-programed pneumatic system. A high-intensity light source was used to trigger the CNT-LCE response, while an infrared (IR) camera continuously monitored surface temperature to ensure thermal equilibrium. Once the desired temperature was reached, each actuator was inflated, imaged, and its deformation was quantified. Each actuator was tested in two independent trials.
As shown in Figure 4(b), the CNT-LCE strips remain inactive when the temperature is below 90°C, and the actuator behaves like a standard elongation module. At higher temperatures, the active strip contracts, inducing bending due to the resulting asymmetric constraint. The bending becomes more pronounced as temperature increases, even under the same pressure. Representative deformation sequences are shown in Supplemental Figure S8. Importantly, the onset and degree of responsiveness can be tuned by adjusting the initial length of the CNT-LCE strips. Shorter strips engage at lower temperatures or pressures, enabling programmable actuation profiles. To support this flexibility, the CNT-LCE strips are connected to the actuator flange using a modular attachment, allowing for easy adjustment or replacement of responsive elements. This design enhances both reusability and adaptability. Stimuli-responsive modules can switch between deformation modes in response to environmental conditions, providing a possible solution for adaptive soft robotic applications.
Soft robotic applications
Soft robotics remains a key application area for pneumatic actuation due to its requirements for high compliance, adaptability, and safe interaction. To demonstrate the versatility and practical value of the proposed modular actuator system, we implemented three representative soft robotics scenarios: a bioinspired trunk-like robot, a soft crawling robot, and a soft gripper with task-specific configurability. These examples highlight the system’s compatibility with different motion requirements and its ability to support efficient reconfiguration for specific tasks and environments. We note that all demonstrations were performed using screw-based flanges, which offer strong mechanical robustness. However, as shown in Supplemental Figure S2, our magnet flange design exhibits comparable sealing performance, suggesting that it can serve as a viable alternative in future implementations requiring faster deployment.
Bioinspired trunk-like robot
Among soft-bodied organisms, the elephant trunk is a well-known biological structure capable of a wide range of controlled motions, including grasping, lifting, and exploration. Since these motions can be decomposed into combinations of bending, elongation, and twisting, trunk-like behaviors can be realized using a combination of the modular actuators described here. Prior studies have demonstrated trunk-like robots performing static tasks such as holding objects, supporting sensors, or guiding tools (Guan et al., 2020; Leanza et al., 2024; Ma et al., 2023). These tasks typically rely on discrete poses (Pikul et al., 2017) rather than continuously reconfigurable shapes, making them particularly suitable for realization using modular assemblies.
We reconstructed five postures that are representative of trunks using targeted combinations of our core functional and responsive modules. Figure 5(a) shows an upward bending motion used to cradle a ball, implemented with four bending modules. Figure 5(b) demonstrates an S-shaped posture for feeding, composed of five bending modules. In Figure 5(c), a downward-reaching motion is achieved using two elongation modules followed by three bending modules. Figure 5(d) recreates a twisting and coiling motion by alternating bending and twisting modules. Finally, Figure 5(e) shows an exploratory behavior in response to an external stimulus, realized with one responsive module and three bending modules. Thanks to the magnetic flange design and modular architecture, reconfiguration between these functional postures—through simple disassembly and reassembly—can be completed in under 1 min (Supplemental Video S1). These case studies demonstrate that, although each module provides a discrete actuation mode, their combinations can approximate complex, biologically inspired motions. Such reconfigurable structures could be further integrated with cameras, end-effectors, or sensors to enable visual inspection, tool positioning, or environmental probing in confined or irregular environments.
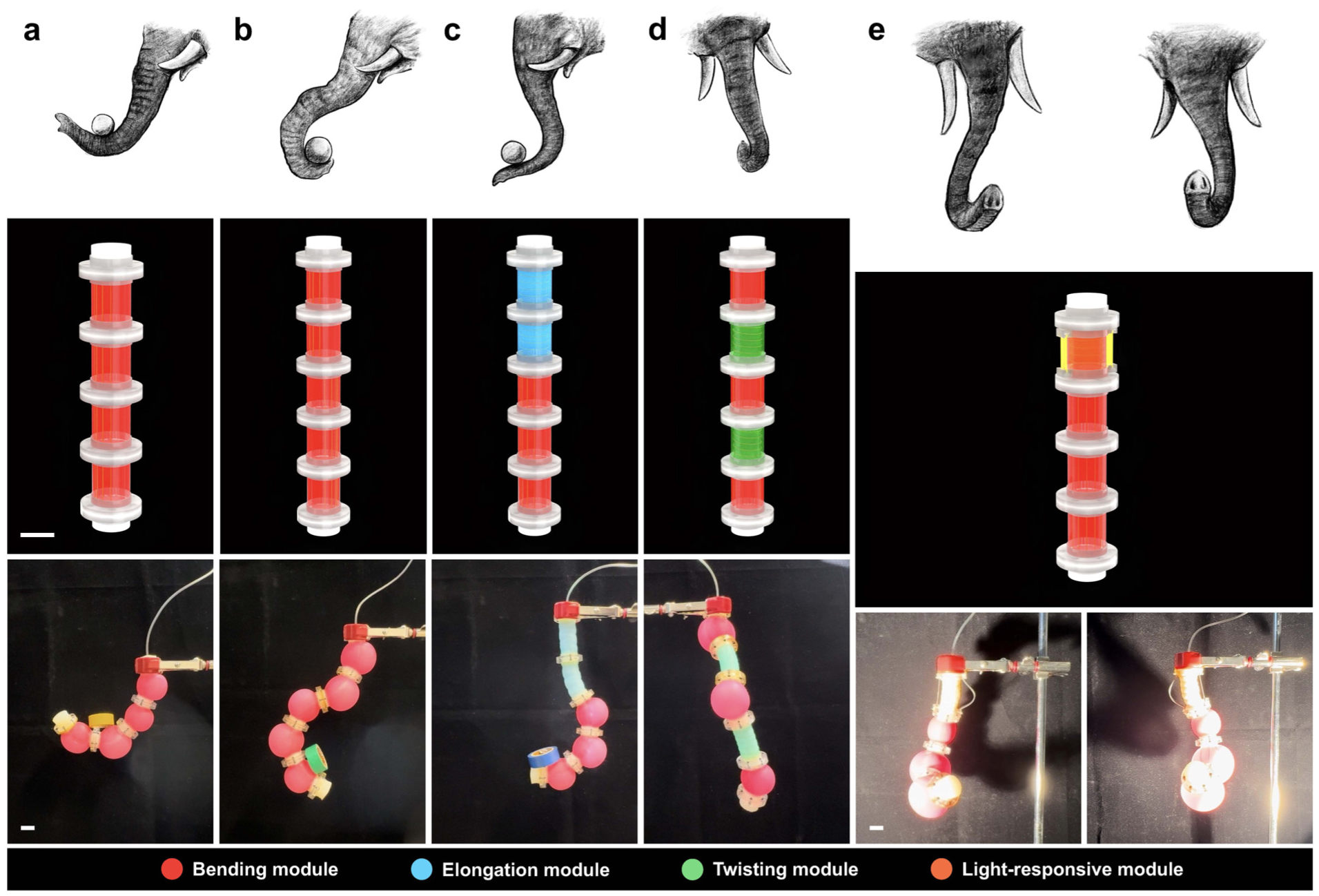
Bioinspired trunk-like robot composed of modular pneumatic actuators: (a) upward bending motion for cradling an object, achieved using four sequential bending modules, (b) S-shaped posture mimicking feeding behavior, formed with five interconnected bending modules, (c) downward-reaching configuration composed of two elongation modules followed by three bending modules, (d) twisting and coiling motion realized using alternating bending and twisting modules, and (e) stimuli-responsive exploratory bending toward an external trigger, enabled by one responsive module combined with one bending module. These configurations demonstrate how discrete actuation modules can be effectively combined to reproduce complex, biologically inspired motions; scale bar: 2 cm.
Soft crawling robot
Crawling robots can also benefit from modular actuation. These systems typically move through rhythmic actuation cycles combined with directional friction generated by asymmetric body structures. Their compact design and adaptability to uneven terrain make them suitable for tasks such as underground exploration, biomedical navigation, and operation in confined spaces (He et al., 2023; Ambrose et al., 2023; Liu et al., 2022; Rafsanjani et al., 2018). However, many existing designs rely on fixed trajectories, limiting their ability to respond or adapt in real time.
To illustrate the adaptability of our modular actuator system, we envisioned a scenario in which a crawling robot performs a multistage delivery task using different actuator configurations (Figure 6(a)). Starting from Warehouse 1, the robot transports raw materials in a straight path to Factory 1. After processing, it carries finished goods to Warehouse 2, requiring both straight and turning motions. In the final step, the robot distributes items to different houses depending on ambient light: at night (low illumination), it moves straight to House 1; under strong light (e.g. daylight), it turns toward House 2. These behaviors are determined entirely by the initial arrangement of actuator modules, with no electronic sensing or control. This conceptual demonstration highlights the potential of modular design to support environment-responsive behaviors in soft crawling robots, offering an alternative to electronics-based control strategies.
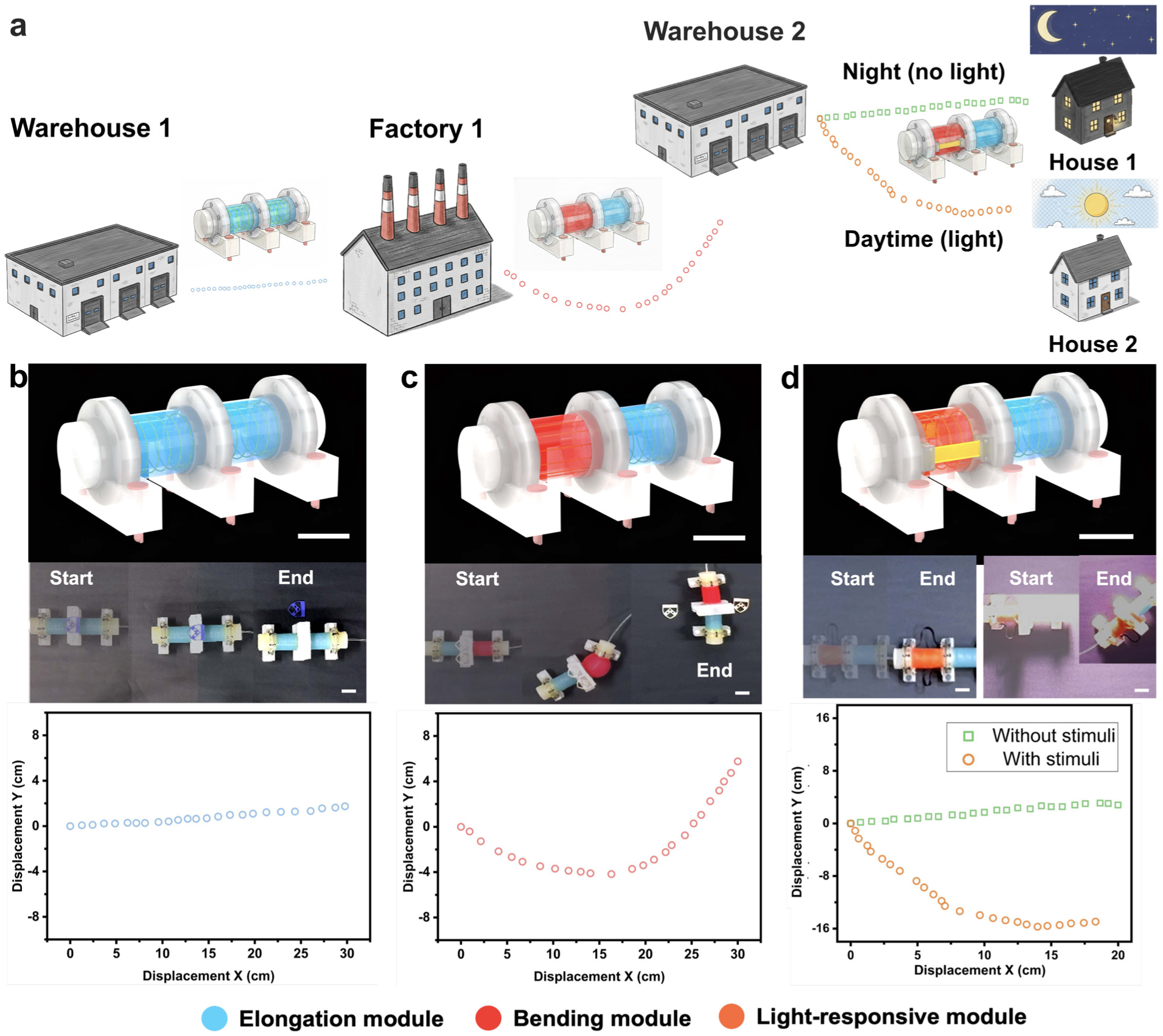
Multistage crawling robot demonstration using modular actuators: (a) conceptual illustration of a crawling robot performing a multistage delivery task. Starting from Warehouse 1, the robot transports raw materials to Factory 1, delivers processed goods to Warehouse 2, and finally distributes items to different houses depending on ambient light, (b) straight-line crawling achieved using two elongation modules combined with directional foot structures that generate asymmetric friction for forward motion, (c) turning motion achieved by reconfiguring the body to include one elongation module and one bending module, and (d) environment-responsive behavior achieved by integrating an elongation module with a stimuli-responsive module, allowing the robot to autonomously switch between elongation and bending under different illumination conditions. Scale bar: 2 cm.
To replicate these behaviors, we constructed three corresponding actuator configurations using our modular platform. In the first stage, straight-line crawling is achieved using two elongation modules combined with directional foot structures that generate asymmetric friction, enabling forward movement across flat surfaces (Figure 6(b)). In the second stage, the actuator body is reconfigured to include one elongation module and one bending module, allowing the robot to turn while continuing to move forward (Figure 6(c)). In the final stage, the robot adapts its motion based on simulated environmental input. If no stimulus is present, it maintains the configuration from the first stage and continues crawling straight forward. When exposed to intense light, it adopts the bending configuration used in the second stage. This adaptive behavior is enabled by integrating a stimuli-responsive module with an elongation module, forming an actuator that autonomously switches between elongation and bending based on external temperature or light (Figure 6(d)).
The locomotion behaviors of the robot are shown in Supplemental Video S2. The magnetic flange design significantly simplifies the attachment and detachment of actuator modules, and additional components, such as the feet, are also implemented using a modular strategy. As shown in Supplemental Video S3, each reconfiguration of the crawling robot can be completed in approximately 1 min, enabling rapid adaptation to different motion modes.
To further assess the utility of the crawling robot in real-world transport scenarios, we evaluated its payload-carrying capability by placing weights on top of its feet and measuring the crawling distance under repeated actuation cycles. Each cycle consisted of a 4 s inflation phase followed by an 8 s pause, with an input pressure of 5 psi. The total travel distance was recorded after 5 and 10 cycles. As shown in Supplemental Figure S9, the robot maintained stable locomotion across 5 and 10 actuation cycles when carrying payloads up to 120 g. Beyond this threshold, its performance degraded sharply, with total transport distance decreasing significantly. When the combined payload reached 180 g, which is the same as the robot’s own weight, no movement was observed.
While the robot does not autonomously transition between configurations, this scenario illustrates how distinct motion modes relevant to crawling locomotion can be achieved through rapid and targeted assembly of modular actuators. Such modularity enables task-specific reconfiguration and underscores the potential of our approach for soft robotic systems operating in diverse and dynamic environments.
Task-reconfigurable soft gripper
Grasping is a fundamental function in soft robotics, and modularity provides an effective way to improve adaptability across different object types. Soft grippers with compliant fingers can conform to irregular shapes and reduce the risk of damage during contact (Atia et al., 2022; Joe et al., 2023; Lin et al., 2020; Truby et al., 2019). However, symmetric grippers often struggle to handle asymmetric or irregular objects without specially designed geometries.
To evaluate the adaptability of our modular actuator strategy, we built a three-fingered soft gripper using bending modules, mimicking the structure and function of a human hand (Figure 7(a)). The gripper was tested on a variety of everyday objects with distinct shapes and sizes: a small acorn, a medium-sized rabbit astronaut toy, a tall pinecone, and a large flowerpot. Initially, three B9 modules were used to symmetrically grasp and place the acorn (Figure 7(b)). To better fit the wider profile of the rabbit toy, one B9 was replaced with a B6 module, enabling an asymmetric grasp by engaging the object’s ear (Figure 7(c)). For the tall pinecone, a second B9 was also replaced with a B6 module, allowing for a more axial grip and improved stability (Figure 7(d)). Finally, the gripper was reconfigured with three B9 modules oriented outward to form a concave frame, enabling it to lift the flowerpot containing all the other objects (Figure 7(e)). Thanks to the magnetic flange design and modular architecture, reconfiguration, such as swapping individual modules or adjusting their orientation, can be completed in under 1 min. These results demonstrate that the gripper can be rapidly reconfigured to handle objects with different geometries, without requiring redesign or refabrication.
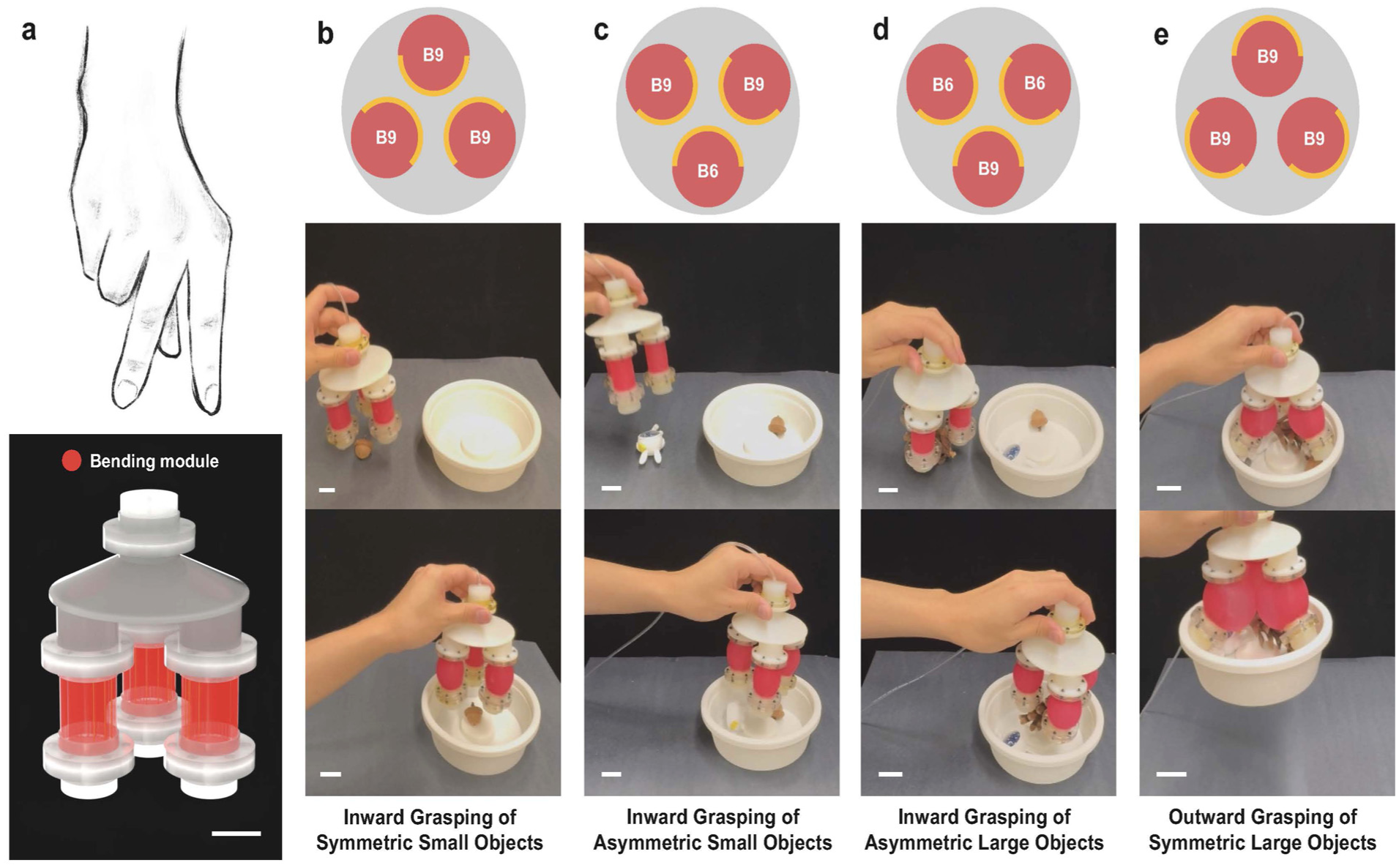
Task-reconfigurable soft gripper composed of modular bending actuators: (a) human hand–inspired gripper assembled from three bending modules and tested on a variety of objects, (b) symmetric grasp of an acorn using three B9 modules, (c) asymmetric grasp of a rabbit toy by replacing one B9 with a B6 module to enable precision holding via the ear, (d) axial grasp of a pinecone by replacing a second B9 with a B6, enabling reorientation of grasping strategy, and (e) outward-facing B9 modules form a concave frame to support and lift a flowerpot containing all previously grasped items. These results demonstrate the gripper’s ability to be rapidly reconfigured for diverse grasping tasks without the need for redesign or additional fabrication; scale bar: 2 cm.
Together, these demonstrations validate the potential for utility of the proposed modular actuator system in soft robotics. The ability to construct task-specific robots by combining standardized modules, and to incorporate environmental responsiveness when needed, provides a practical and scalable approach for building adaptive soft robotic platforms.
Discussion
By defining a compact set of functional modules and systematically characterizing their pressure–deformation behavior, we established a reusable and rapidly reconfigurable framework applicable to a wide range of soft robotic tasks. The successful implementation of representative demonstrations, including object manipulation, directional crawling, and trunk-like posturing, highlights the system’s adaptability, ease of deployment, and ability to respond to environmental stimuli. In addition, the system’s low cost, safe operation, and modularity make it well-suited for use in educational environments, where hands-on exploration of soft robotics principles is highly valuable.
Despite these advantages, the current study has several limitations that merit further discussion. First, the actuator and flange geometries used here were selected for demonstration purposes and are not application-specific. These dimensions can be scaled according to task requirements. For instance, miniaturized modules may be better suited for compact, high-precision applications such as medical procedures, whereas larger form factors may be appropriate for high-load or long-reach tasks. The modular design principles remain valid across scales, as long as structural integrity and pneumatic sealing are maintained.
Second, Kevlar fibers were employed to induce directional stiffness and guide deformation. While Kevlar offers favorable mechanical properties, other fiber materials or reinforcement methods could be explored depending on specific design and fabrication constraints. Likewise, although a two-step molding process was used for its simplicity and precise fiber placement, alternative fabrication techniques such as DLP-based elastomer 3D printing, VAT photopolymerization, or direct ink writing may offer faster and more scalable solutions for producing modular actuators with high repeatability. In addition, such fabrication methods may improve surface quality and sealing precision at module interfaces, thereby reducing leakage and enabling more stable long-duration actuation.
Third, the current module library includes four representative actuation modes: bending, elongation, twisting, and environment-responsive deformation. These were selected for their broad relevance to soft robotic tasks. However, the modular framework is inherently extensible. Additional modules, such as contraction, bidirectional gripping, or negative-pressure actuation, could be added without changes to the connection interface, enabling further expansion of system capabilities. This structural flexibility supports both long-term scalability and functional diversity.
The soft robotic demonstrations in this work, that is, the trunk-like manipulator, crawling robot, and reconfigurable gripper, were chosen to represent distinct motion requirements. However, the same framework can be applied to other applications. With task-specific customization (e.g. the tri-port pneumatic manifold used in the gripper), the modular actuators can be adapted for a wide range of functional scenarios in soft robotics.
Finally, we note that the current actuator system requires an external pneumatic source, which may constrain its use in untethered or field-deployable applications. Future development may address this limitation by incorporating small gas-generation modules, such as onboard compressed gas cartridges Drotman et al. (2021), to enable more portable operation. Another promising direction is to develop pumpless actuation modules based on phase-change materials or gas-producing reactions Yoon et al. (2023), (Yung et al., 2024), which would further enhance system autonomy and versatility.
In summary, the modular actuator system developed in this study offers a generalizable and reconfigurable foundation for building adaptive soft robotic platforms. With the continued expansion of the module library, adoption of scalable fabrication methods, and integration of predictive modeling tools, this approach may enable the next generation of task-oriented, adaptable soft robotic systems.
Conclusion
In this work, we introduced a modular design strategy that made use of magnetic coupling to enable functions relevant to reconfigurable and adaptable pneumatic soft robots. We created and characterized three basic module types, including elongation, bending, twisting, and one functional module that responds to environmental stimuli. These modules form a library that can be quickly combined in different ways to perform different tasks. We used these modules to demonstrate several example robots: a trunk-like manipulator, a crawling robot, and a soft gripper. These demonstrations show that our system can achieve typical soft robotic functions such as animal-like motion, object handling, and environment responsiveness. Although our current actuators use specific materials, sizes, and connectors, the design approach can be applied to other setups as well. In the future, we plan to add more types of actuators, explore scalable fabrication methods, and improve modeling and control using experimental data and data-driven techniques.
Materials and methods
Fabrication of actuator bodies
The core functional modules developed in this study, including bending, elongation, twisting, and stimuli-responsive actuators, were fabricated using a two-step molding process. The twisting, elongation, and stimuli-responsive modules were molded entirely from Ecoflex-0030 (Smooth-On, Inc.), while the bending modules were made using a 1:1 mixture of Ecoflex-0030 and Dragon Skin-0010 (Smooth-On, Inc.) to better match the deformation characteristics required for asymmetric bending.
The detailed molding procedure follows the protocol described in our previous work (He et al., 2023). After the first casting step, 0.45 mm-diameter Kevlar fibers (Rocket Fibers, 1500 Denier) were wound around the cured elastomer surface. To ensure precise positioning, the inner surface of the mold was designed with pre-defined grooves corresponding to the desired fiber paths. After demolding, the Kevlar fibers were manually placed into these grooves and secured using Sil-Poxy adhesive (Smooth-On Inc.). A second casting was then performed to fully embed the fibers within the actuator body. This method yielded fiber-reinforced actuators with internal anisotropy tailored to produce specific deformation modes.
End caps were fabricated separately using a single-step casting process with Dragon Skin-0010, selected for its higher stiffness to minimize deformation during actuation. As a result, the caps can be treated as rigid components in system-level analysis. Their geometry is illustrated in Supplemental Figure S10. All molds for both actuator bodies and end caps were 3D printed using PLA filament on a Bambu Lab P1S FDM printer.
Fabrication of CNT-LCE for stimuli-responsive modules
The environmentally responsive behavior of the stimuli-responsive module is achieved using carbon nanotube–doped liquid crystal elastomers (CNT-LCEs). The synthesis process follows the protocol reported in our previous work (He et al., 2023), and the mechanical properties of the fabricated CNT-LCE films are shown in Supplemental Figure S11. For further details, including the time response of the materials, please also see our prior publication.
After fabrication, the CNT-LCE films were cut into strips with lengths matching the axial extension of the E6 elongation module under 5 psi inflation. Each strip was bonded to a pair of custom-designed micro-connectors using high-strength adhesive. These connectors were fabricated using a Projet 6000 SLA 3D printer and mounted onto the actuator flange using screw-and-nut fasteners. This attachment scheme preserves system modularity and allows straightforward replacement or reconfiguration of the responsive components.
Fabrication of magnet flanges
After fabrication, each core functional module was connected to a pair of 3D-printed magnetic flange components. Two types of flanges were employed: magnetic flanges for core functional modules and magnetic flanges for stimuli-responsive modules. Both types consist of SLA printed structural parts (Projet 6000, 3D Systems) and embedded permanent neodymium magnets (RX8C2, K&J Magnetics, Inc.). This design ensures rapid assembly and disassembly, maintains airtightness, and allows relative rotation between flange pairs. The flanges used for stimuli-responsive modules additionally feature integrated connectors to interface with custom micro-connectors for mounting CNT–LCE strips. The geometries of both flange types are shown in Supplemental Figure S12.
End caps were similarly connected to the magnetic flanges used for core functional modules. To ensure airtightness at each flange interface, a sealing ring molded from Dragon Skin-0010 was inserted between every flange pair. Upon engagement of the permanent magnetic attraction, the sealing ring is compressed to conform to the interface geometry, forming a pressure-tight seal. In the experimental setup, the perforated end caps were connected to the pneumatic control system via air tubes and push-to-connect fittings, both sourced from McMaster-Carr.
Experimental setup for actuation measurement
All pneumatic actuation tests in this study were conducted using a custom-built pressure control system, previously described in our earlier work (He et al., 2023, 2024). The system controls air pressure via pulse-width modulation (PWM) of solenoid valves and employs real-time feedback from a pressure sensor to implement closed-loop PID control, enabling stable and accurate pressure delivery. The controller supports both manual and programmable modes, and pressure data is displayed in real time on an integrated LCD screen.
For the characterization of the core functional modules, pneumatic pressure was applied using pre-programed sequences to enable systematic testing across configurations. The experimental setup for core module testing is shown in Supplemental Figure S13. For the stimuli-responsive module, an additional infrared (IR) camera (FLIR E76) was used to monitor the surface temperature of the CNT-LCE strips in real time. A high-intensity light source (Smith Victor Corp. TL-2) served as the environmental stimulus to trigger thermo-optical actuation. The complete setup is shown in Supplemental Figure S14.
Local deformation tracking of actuators
To investigate the local deformation behavior of fiber-reinforced actuators, we conducted a detailed study of the elongation modules using digital image correlation (DIC). The open-source MATLAB-based software Ncorr was employed to perform non-contact, full-field displacement measurements by tracking speckle patterns across sequential images. Ncorr is well suited for soft materials due to its sub-pixel accuracy and compatibility with large deformations. In our experiments, speckle patterns were manually applied to the actuator surfaces, and images were recorded at fixed pressure intervals. The resulting displacement fields provided insight into localized strain distributions and confirmed the internal constraint effects introduced by the embedded fibers.
Experimental design for soft robotic applications
In the crawling robot experiments, locomotion was achieved through directional friction generated at the robot’s feet, specifically, by exploiting differences in frictional resistance during forward and backward motion. To couple the feet to the actuator chain, a pair of foot adapters was molded from Dragon Skin-0030 and bonded to the first and last magnetic flanges. Each adapter featured dual sockets for interchangeable foot components, which were fabricated from PLA using a Bambu Lab P1S 3D printer. Foot geometries were customized to suit different testing scenarios. A schematic of the adapters and foot components is provided in Supplemental Figure S15(a).
For the reconfigurable soft gripper experiments, each bending module was connected to a custom-designed three-way air distribution chamber (referred to as the tri-port manifold). The top inlet of the manifold was connected to a perforated end cap serving as the pressurized input, while the three lower outlets were symmetrically arranged and equipped with flange interfaces for attaching individual bending modules. A schematic of the tri-port manifold is shown in Supplemental Figure S15(b). The manifold was printed using a ProJet 6000 stereolithography printer to ensure dimensional accuracy and airtight sealing. This configuration enabled simultaneous actuation of all three fingers and provided a modular platform for task-specific reconfiguration. All soft robotic application experiments were performed under manual pressure control to allow real-time human operation.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors gratefully acknowledge support via NSF CAREER award number CMMI-2239308 and AFOSR award number FA9550-23-1-0416.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.