
Abstract
Accurate reconstruction of freeform engineering surfaces from measured point clouds is essential in modern CAD, CAM, CAE and industrial reverse-engineering pipelines. Conventional B-spline fitting often struggles to balance geometric fidelity, parameterization quality and computational efficiency, particularly when input data contain both smooth regions and localized irregularities. Although truncated hierarchical B-splines enable localized refinement, classical hierarchical fitting frequently applies refinement even when errors are predominantly caused by distorted parameterization rather than insufficient geometric resolution. This work presents a hybrid fitting framework that integrates local parametric optimization with adaptive truncated hierarchical refinement to achieve high accuracy while maintaining a compact surface representation. A global least-squares B-spline approximation establishes the baseline geometry, and an error-driven analysis identifies regions requiring improvement. Each region is first corrected through local optimization of parametric values to reduce mapping distortion, while refinement is introduced only when optimization alone provides insufficient error reduction. Truncation confines refinement to the selected region, limiting the recomputation to the associated control points. The framework is evaluated on several engineering geometries and consistently reduces refinement depth and degrees of freedom while achieving accuracy comparable to or better than classical hierarchical fitting. The results indicate that coupling parametric optimization with localized hierarchical refinement provides a computationally efficient and robust strategy for engineering-oriented freeform surface reconstruction.
Keywords
Introduction
Motivation
Accurate reconstruction of freeform surfaces from measured or simulated data is essential in many engineering tasks, including hull-form modeling, geometric inspection, reverse engineering and the generation of watertight CAD and CAE models. Such reconstructions are also increasingly important in modern digital engineering environments, where accurate geometric representations serve as the foundation for digital twins, simulation-driven design and data-integrated product lifecycle workflows. Modern point clouds commonly include smoothly varying regions together with isolated or densely distributed geometric features. Effective reconstruction requires high geometric fidelity, adaptive refinement capabilities, computational efficiency and a compact surface representation.
The reconstruction process typically begins with the acquisition of geometric data through 3D scanning or simulation. The resulting point cloud represents a set of sampled points describing the object's geometry. Depending on the scanning technology and acquisition resolution, the point cloud may contain dense sampling, noise and other artefacts that require filtering or segmentation.29,43 Although a point cloud provides geometric coordinates, it does not constitute a usable numerical representation for advanced computational procedures and therefore must be converted into an appropriate parametric model to obtain a functional and accurate freeform surface representation. 9 The resulting set of shape parameters should be compact yet sufficiently informative to accurately represent the original geometry. Transforming a point cloud into a parametric model typically requires solving complex and often nonlinear numerical problems.
The reconstruction process proceeds with the selection of an appropriate parametric model that can describe the input data and support subsequent shape optimization. Model selection is often guided by practical considerations, since different parametric formulations vary in flexibility and their ability to represent complex geometries. Inadequate model choice may lead to unnecessarily high dimensionality, increased computational cost and reduced numerical stability. 9
For engineering applications, B-splines and NURBS are among the most commonly used parametric surface models.
For geometries requiring local refinement, adaptive spline models such as T-splines and truncated hierarchical B-splines (THB-Spline) have become common, since they allow modification of selected subregions without affecting the global surface.
Industrial geometries often contain large smooth regions alongside small but critical features such as fillets, bolt seats or curvature transitions. Global spline refinement results in a higher number of degrees of freedom and may negatively affect downstream simulation and design tasks. In many cases, fitting errors arise not from inadequate geometric resolution but from parameterization distortion introduced by the scanning process or by the surface topology. These considerations motivate methods that improve parameterization when possible and introduce geometric refinement only when reparameterization cannot achieve the desired accuracy.
This paper proposes a hybrid fitting method that integrates gradient-based parametric optimization with hierarchical spline refinement. The method relies on the interaction between global parametric optimization and local truncated hierarchical refinement. In the first stage, gradient-based optimization is applied to the initial B-spline surface to improve its global topology and establish an adaptive parametric distribution. This stage not only enhances the quality of the initial fit but also provides valuable information for determining which regions exhibit higher geometric deviation and therefore require further refinement. The second stage represents the core of the proposed method. When a subregion of the THB-Spline surface is selected for refinement, gradient-based parametric optimization is first applied locally within that region. This allows the fitting to adapt more effectively to the geometric features without immediately increasing the number of hierarchical levels. If the local optimization achieves sufficient improvement, additional THB refinement can be avoided, resulting in lower computational cost and fewer shape parameters. Conversely, if no significant improvement is achieved through parametric optimization, a new THB refinement level is introduced to increase local resolution. In this way, the hybrid procedure intelligently balances global and local fitting accuracy, achieving robustness, adaptability and computational efficiency while minimizing unnecessary refinement.
The paper is organized as follows. Section 2 describes theory behind B-Splines and THB-Splines, Section 3 describes procedure behind B-Spline surface construction via least squares approximation and reducing the problem to linear system. Section 4 and 5 narrates developed methodologies upon which proposed hybrid fitting method is developed and proposed fitting method, respectively. In Section 6, several numerical examples are given, with Section 7 concluding the paper.
Literature review
NURBS and B-splines have become the de facto standard parametric models for surface fitting and CAD representation. This work focuses on fitting methods that incorporate parameterization of data acquired through 3D scanning. The first step toward constructing a CAD model is to parameterize the input point cloud into a two-dimensional parametric domain, typically the unit square in variables u and v. Early studies applied uniform, chord-length and centripetal parameterization to one-dimensional fitting problems.18,46 For three-dimensional data, more sophisticated parameterization methods are required. These approaches include mapping techniques that compute a parameterization by minimizing deformation energy, 41 as well as other energy-based strategies.19,20 More recent work includes neural network–based parameterization methods,27,48 in which models are trained to reproduce established mapping techniques. 57 provided a comprehensive review of point-cloud parameterization methods. For single-patch NURBS fitting, extensive research has focused on optimizing knot placement, control points, along with the associated weights. The control points are typically computed using a least-squares approximation.
Many B-spline fitting methods focus on optimizing knot values. Early studies employed uniform, chord-length and centripetal strategies for knot placement,13,14 while subsequent work introduced adaptive methods based on local data deviation, 30 dominant-point strategies 44 and knot insertion and removal algorithms.31,54 Metaheuristic approaches, including genetic algorithms and particle swarm optimization, have been applied to optimize knot positions, parametric values and control points jointly.22,24,38 Ćurković et al. proposed dynamic reparameterization procedures combining gradient-based optimization of the parametric grid with auxiliary functions 10 and principal component analysis with Gaussian convolution. 11 Neural network models have recently been applied to predict parametric values and knot locations.49,55
NURBS fitting extends B-spline fitting through the inclusion of weight parameters. Gradient-based methods addressing the global NURBS fitting problem are presented in,7,37 while metaheuristic strategies have been employed to optimize knots, weights and control points simultaneously.8,23,53 Neural network architectures incorporating B-spline basis functions have also been proposed for NURBS parameter identification.16,52
In cases involving more complex topologies, single-patch B-spline and NURBS representations often fail to achieve satisfactory fitting accuracy. To enable more precise and localized control over shape parameters in specific regions, adaptive parametric models with local refinement capabilities have been developed. Prominent examples include T-splines, 50 Locally Refined (LR) B-splines 15 and hierarchical B-splines. 21 T-splines are constructed on T-meshes, which facilitate local refinement through the introduction of T-junctions. However, T-spline basis functions are not guaranteed to be linearly independent. 6 To address this issue, 39 proposed a class of T-splines that maintain key mathematical properties such as non-negativity, linear independence and the partition of unity. Similarly, LR B-splines achieve linear independence of basis functions under specific conditions. Building on this, 4 and 2 extended the formulation of LR B-splines to ensure partition of unity, local support and linear independence. While both T-splines and LR B-splines can be viewed as B-splines defined over locally refined knot vectors, hierarchical B-splines adopt a fundamentally different approach. They are based on a multilevel construction within the tensor-product space of basis functions, enabling a more robust and computationally efficient form of local refinement. 26 Nonetheless, standard hierarchical B-splines lack the partition of unity property, which limits their direct applicability in certain contexts. To overcome this limitation, 25 introduced truncated basis functions, giving rise to THB-splines, which preserve the partition of unity property. This development paved the way for the efficient use of hierarchical B-spline spaces in geometric modeling. The first surface fitting approach employing THB-splines for CAD model construction utilized least-squares approximation by 25 and. 32 Subsequently, quasi-interpolation schemes were introduced to compute spline coefficients.5,51 More recently, 3 proposed a hybrid approach that combines least-squares fitting with quasi-interpolation: in the first stage, a least-squares solution identifies regions requiring refinement, and in the second stage, quasi-interpolation defines the coefficients of the locally refined spline functions.
Recent studies in computer-aided engineering further highlight the growing role of data-driven modeling and advanced computational techniques in engineering applications. For example, 36 investigated automated surface defect detection in industrial manufacturing, while 17 introduced a parametric and feature-based CAD dataset supporting human–computer interaction in 3D shape learning. Computational modeling and simulation approaches have also been explored in broader engineering contexts, including regional seismic damage assessment of building curtain walls 45 and gravity-constrained SLAM methods for improving mapping accuracy in large-scale environments. 56 In robotics, 42 examined the role of joint range-of-motion development in improving learning performance. These studies illustrate the increasing integration of data-driven and optimization-based techniques across modern computer-aided engineering workflows.
Relation to previous work and contribution
Our earlier research primarily investigated global parameter optimization techniques for single-patch B-spline and NURBS surfaces. 10 Proposed nonlinear and evolutionary optimization frameworks aimed at improving the global parameterization of single B-spline surfaces, whereas 11 derived analytical knot-sensitivity formulations and compared parameter and knot optimization within the broader context of shape optimization. Further studies from our group explored parameter selection, knot insertion and sensitivity analysis, yet these investigations remained confined to the paradigm of a single surface patch applied to relatively simple or moderately complex geometries.
A central limitation of these earlier methods lies in their underlying assumption that the entire geometry can be adequately represented by a single tensor-product B-spline or NURBS patch. While effective for smooth, compact and moderately sized surfaces, such global representations become increasingly unsuitable as geometric complexity grows. Complex engineering surfaces often exhibit strong curvature variations, disconnected regions of local detail and spatial scales that render global parameterizations unstable or prone to excessive distortion.
The present study addresses this fundamental constraint by extending our previous framework toward locally adaptive, multilevel surface representations. Specifically, we employ THB-Splines to achieve localized refinement while maintaining essential mathematical properties such as partition of unity and basis linear independence. Moreover, local parametric optimization is introduced to enhance parameter quality at the subdomain level, thereby mitigating mapping distortions without increasing the number of global control variables. This integration of adaptive refinement and local optimization establishes a hybrid modeling framework capable of reconstructing large, geometrically intricate surfaces that cannot be represented effectively by a single global B-spline or NURBS patch.
The principal contributions of this work are summarized as follows: A hybrid surface fitting framework that integrates local parametric optimization with adaptive truncated hierarchical refinement. A patchwise parameter-correction mechanism that mitigates mapping distortions without introducing additional global degrees of freedom. A truncation-consistent refinement strategy that ensures strictly localized hierarchical enrichment. A formal complexity analysis demonstrating that the proposed hybrid scheme requires fewer refinements and fewer unknowns than classical hierarchical fitting. A topology-sensitive evaluation that quantifies the interplay between parameter correction and refinement intensity. Applications to three representative engineering geometries that demonstrate the method's robustness and practical relevance.
B-Spline and THB-spline parameterization
B-Spline parameterization
B-Spline surface is defined as a product of bidirectional net of control points

Knots

Basis functions
Further refinement of a B-spline parametric model is achieved through knot refinement, yielding a new refined global knot vector.
21
To restrict refinement to regions of interest,34,35 introduced the hierarchical B-spline (HB-Spline) space, defined via tensor product B-spline basis functions with nested spline spaces

The HB-spline space supports adaptive local refinement while preserving linear independence, non-negativity and the nested structure of spline spaces; however, it does not satisfy the partition-of-unity property. This limitation was addressed by
25
through the introduction of the truncation operator, which removes the contributions of refined basis functions at coarser levels, thereby restoring the partition-of-unity property and yielding the THB-Spline basis. The truncation mechanism exploits the fact that any basis function


With truncation operator defined THB-Splines are defined as
Definition 1. The THB-Spline basis space
Initialization:
Recursive construction of
Result:
where





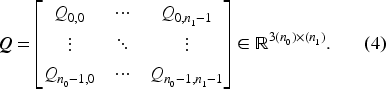
Hierarchical mesh (a) and nested sequence of domains (b) with hierarchy
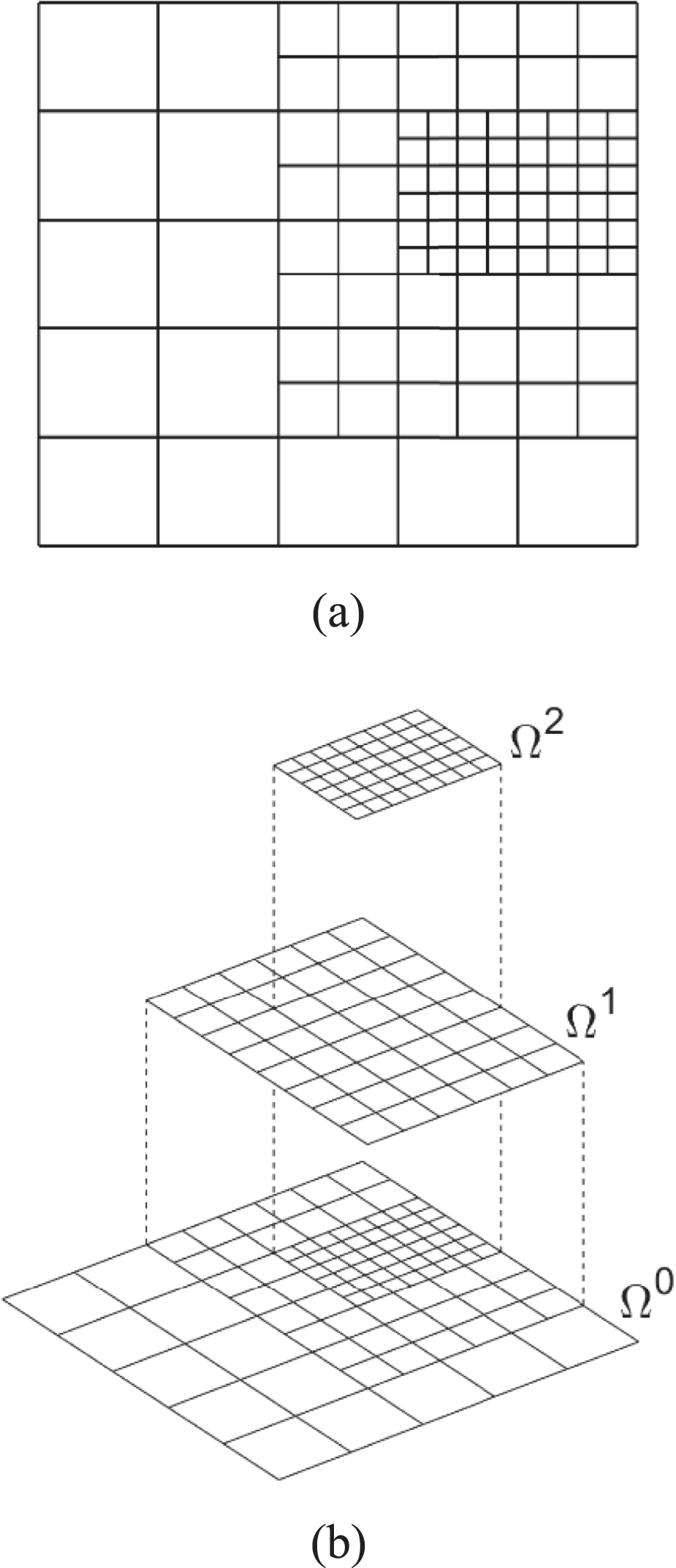
Starting from initial B-Spline basis
Presented in Figure 1, starting from initial grid
This section explains the process used in this paper to obtain an initial B-spline surface from point-cloud geometry. From the input point-cloud geometry, a matrix-based data set is obtained through harmonic mapping and interpolation. The geometry in matrix form is associated with an initial, equidistant grid of parametric values, which is subsequently optimized. The baseline parametric values and their role in B-spline surface construction, which plays a key role in the proposed fitting procedure, are explained in detail in this section. Finally, after defining the matrix data set and the grid of parametric values, the B-spline surface is constructed using a least-squares linear system. Crucially, the initially constructed B-spline surface serves as the only globally computed solution within the proposed procedure.
Geometry projection into 2D parametric space
The approach for constructing a B-Spline surface, used throughout this paper, requires a structured matrix data set


Triangulated point cloud data of boat hull (
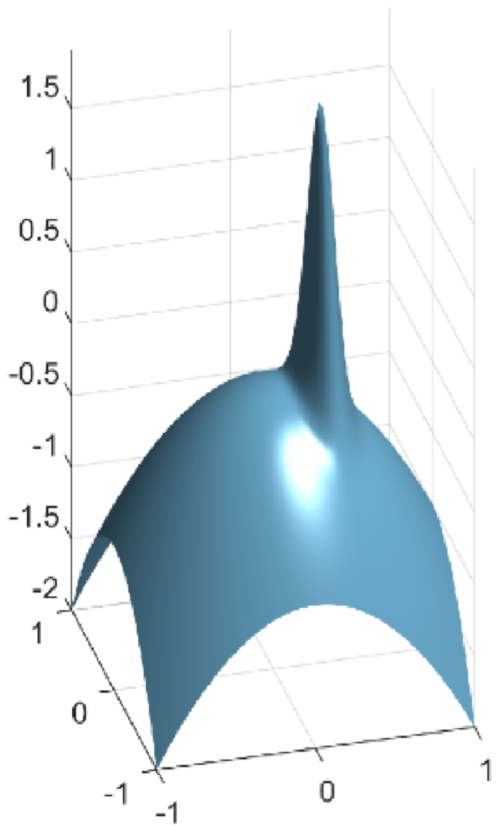
Negative quadratic surface with Gaussian function bump.
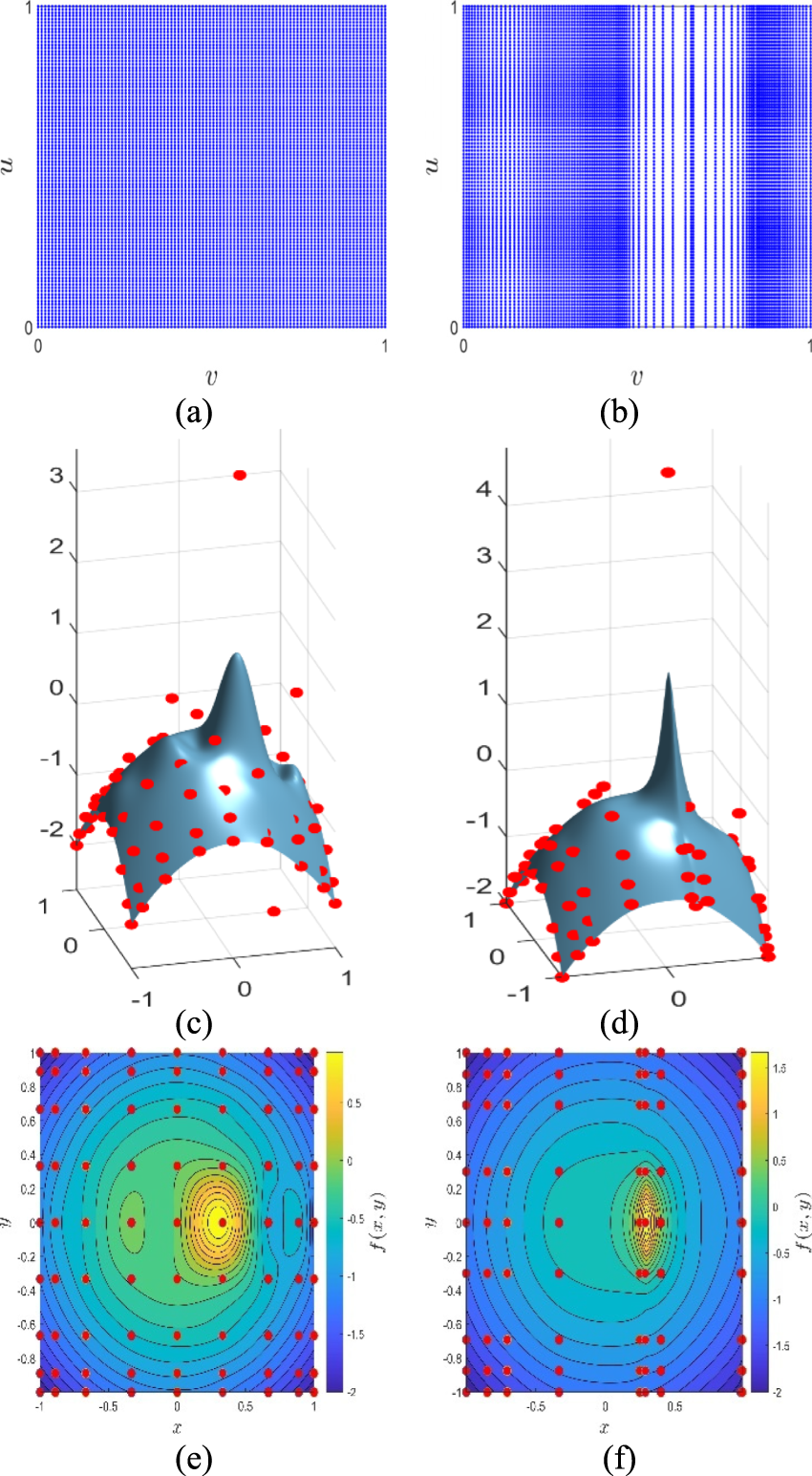
Example of topological parameters optimization on quadratic function with asymmetrical Gaussian bump (Figure 4). B-Spline least squares approximation with equidistant cparametric grid in the first row (a-e) with sum of squares error
The resulting matrix dataset serves as the reference geometry for subsequent surface fitting and error evaluation procedures. It is important to emphasize that the matrix representation significantly reduces algorithmic complexity and computational cost during B-spline surface construction, as it provides a structured and uniform data layout. However, this representation is not suitable for capturing large or highly intricate point cloud geometries, since the regular matrix discretization may fail to preserve the detailed spatial characteristics of the original surface.
When fitting a B-spline surface to a geometry defined by a matrix dataset, each parametric point
Fitting procedure of B-Spline surface relies on minimizing error defined by standard least squares formulation
10

The B-spline surface parameters, namely the polynomial degrees


The proposed hybrid fitting framework integrates two complementary methodological approaches. The first approach builds upon the work of,10,11 where reparameterization of the parametric values is achieved through a gradient-based optimization procedure. This optimization ensures improved parameter uniformity and reduced mapping distortion across the parametric domain. The second approach employs THB-spline refinement by 25 and,33,32 enabling adaptive local refinement within regions exhibiting elevated geometric approximation error. By combining these two strategies, the hybrid method achieves both enhanced parametric quality and locally controlled surface fidelity.
Optimization of parametric values
When applying the fitting procedure defined in Eq. (10) each point from the geometry matrix
The influence of parametric values optimization can be interpreted through B-Spline surface theory.
10
Each control point

The presented test function, defined on a grid of size
Refinement subdomains selection and THB-Spline parameterization
Following global optimization of the parametric values, the fitting procedure proceeds with THB-Spline refinement applied to subdomains of pronounced geometric error. The fitting error is quantified as the Euclidean distance


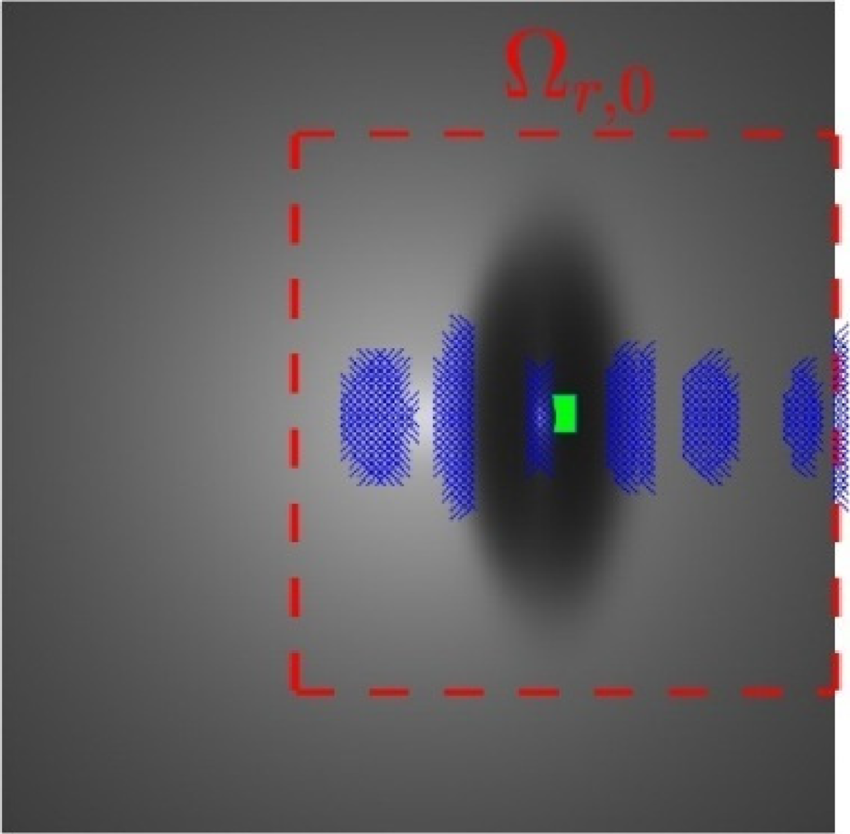
Example of refinement subdomain definition: extracted error points
If this condition is violated, the least-squares system becomes underdetermined and further refinement is infeasible, indicating that the recursive process is inherently constrained by the resolution of the input data grid.
At the beginning of the hybrid fitting procedure, the input geometry is provided in matrix form. This matrix representation inherently contains a predefined parametric grid initialized with equidistant parametric values. The same matrix-based geometry is employed as the reference surface for evaluating fitting errors between the constructed and target geometries. For an arbitrary B-Spline polynomial degree Local parametric values optimization with THB-Spline parameterization. THB-Spline recursive parameterization with optimal parametric values. THB-Spline recursive parameterization with initial parametric values.
The flowchart presented in Figure 7 summarizes the proposed hybrid fitting framework. After the refinement regions are defined, the three hybrid fitting strategies are executed independently and their respective results are evaluated to identify the configuration that yields the most accurate surface reconstruction. The first strategy applies gradient-based optimization locally within each refinement subdomain, combined with a single level of THB-Spline parameterization. If no significant improvement in fitting accuracy is achieved or if the optimization process fails to converge, the second strategy is employed. In this approach, recursive THB-Spline parameterization is performed using the geometry associated with the globally optimized parametric values. The third strategy applies THB-Spline parameterization over the previously defined refinement subdomain, but utilizes the initial equidistant parametric configuration instead of the optimized one. Upon completing all three fitting procedures, the results are compared and analyzed by the user to determine the optimal solution. The selection criteria depend on the specific application requirements and may prioritize minimal fitting error, reduced computational time, or a smaller number of active shape parameters.
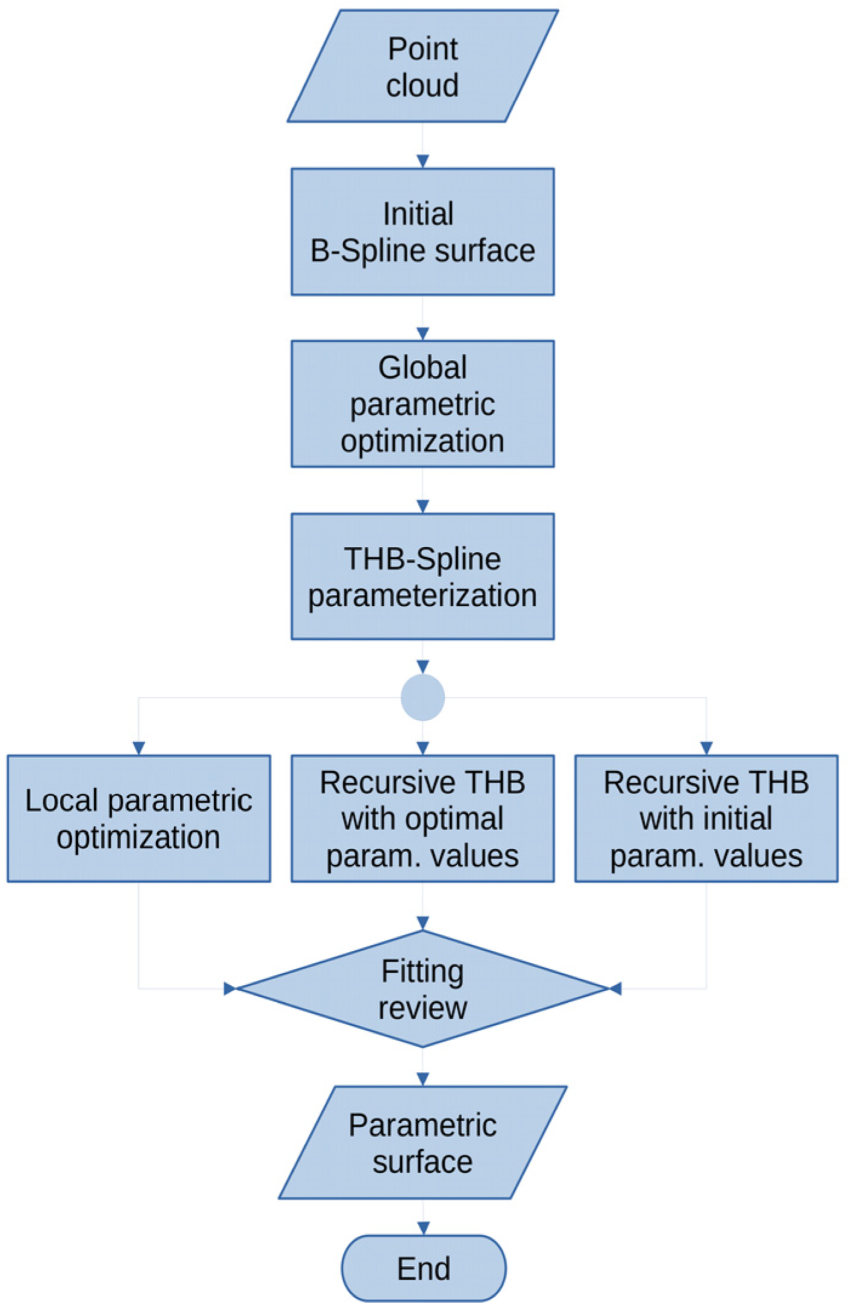
Flowchart of proposed hybrid fitting method.
The primary objective of the proposed hybrid fitting framework is to enhance THB-Spline parameterization accuracy through optimization of parametric values. The global optimization stage improves the initial B-Spline surface fit to a degree determined by the geometric complexity of the input geometry, while simultaneously identifying regions that require local refinement. Consequently, the subsequent THB-Spline parameterization achieves superior fitting accuracy with adaptive control over precision, computational cost, and the extent of local enrichment. The workflow and outcomes of each stage are demonstrated on the reference example of a negative quadratic surface with an embedded Gaussian bump. Since the proposed procedure exhibits topology-dependent behavior, the effectiveness of each fitting step varies according to the geometric and topological characteristics of the input surface. A comparative analysis is conducted across all fitting stages, evaluating the reduction in fitting error, computational time, and the number of active shape parameters, thereby identifying the fitting strategy that yields the optimal balance between geometric accuracy, computational efficiency, and model compactness.
Each refinement subdomain is parameterized using a single-level THB-Spline model and new control points are computed through local least-squares approximation. The local parametric vectors
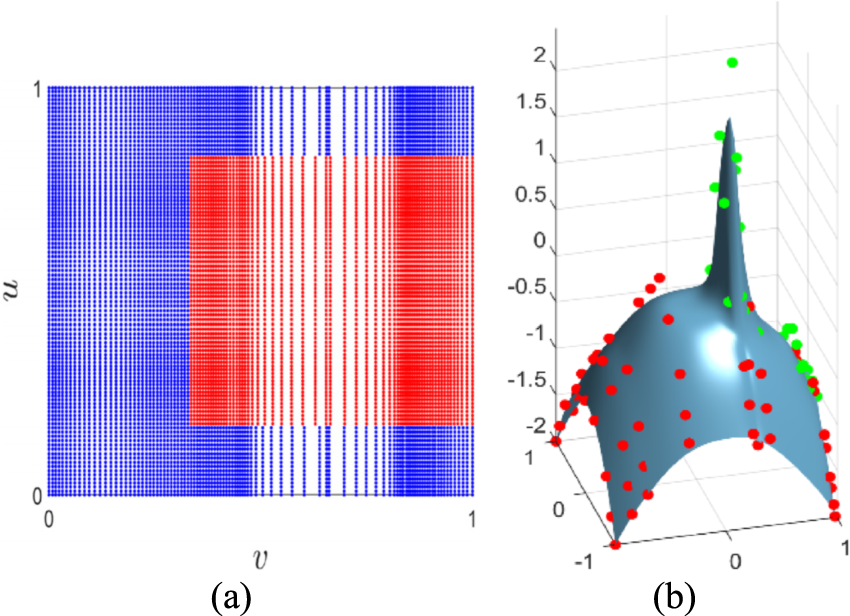
Results of local parametric values optimization on negative quadratic surface with Gaussian bump. Blue points represent solution of global parametric values optimization and red points are locally optimized parametric points (a), with constructed THB-Spline surface (b) where red dots are control points from initial B-Spline with optimized parametric values and green dots are control points in first level of THB parameterization.
If the reparameterization does not yield a sufficient reduction in fitting error, truncated hierarchical refinement is applied within the subdomain
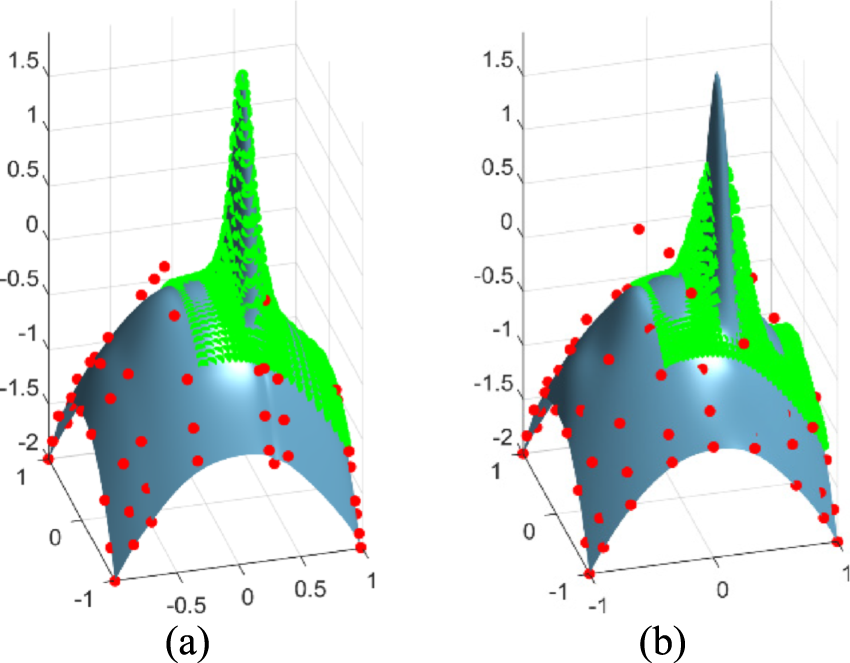
Three level refined THB-Spline example function with optimal parametric values (a) and initial parametric values (b) where green dots represent last refined level control points.
The hybrid method is designed for practical engineering workflows where accuracy, compact representation and computational efficiency are essential. Its ability to adaptively balance global and local fitting procedures enables efficient reconstruction of complex geometries while minimizing the number of control points. By integrating parametric optimization with THB-Spline refinement, the method achieves high geometric fidelity with reduced computational cost, making it suitable for CAD model reconstruction, reverse engineering and surface design tasks that demand both precision and scalability. Its ability to: perform refinement only where necessary, correct parameterization distortions, preserve compatibility with CAD and CAE systems, maintain local support and stable refinement through truncation,
makes the proposed hybrid framework particularly suitable for practical engineering applications such as reverse engineering, quality inspection and simulation preprocessing. These characteristics ensure that the method not only delivers accurate and computationally efficient surface representations but also integrates seamlessly into existing industrial modeling and analysis workflows.
To formalize the selection among the three fitting strategies introduced in Section 5, a composite decision functional can be defined as

The algorithm performs two types of operations: (i) local parametric optimization and (ii) local truncated hierarchical refinement. We examine best, average and worst-case behaviors. Cost of Local Parametric Optimization:
Let

The Levenberg-Marquardt update solves a system of size

Since Cost of Local Refinement:
Let

Typically Average-Case Behavior:
In many engineering surfaces, errors arise primarily from parameterization distortion. Thus:

The numerical experiments indicate that parametric optimization can resolve a significant portion of high-error regions before additional refinement becomes necessary for geometries with localized dominant features. However, its effectiveness decreases for surfaces characterized by dense and uniformly distributed geometric variations, where hierarchical refinement remains the primary mechanism for accuracy improvement. This confirms that the contribution of parametric optimization is inherently topology-dependent. Worst-Case Behavior:
The worst case occurs when parameter optimization is attempted for every patch but refinement is eventually required for all:

Because

Best-Case Behavior:
If all high-error patches are caused by parametric distortion, no refinement occurs:

The proposed framework is implemented using hierarchical B-Spline (THB-Spline) representations with fixed polynomial degree p. All experiments are initialized using an equidistant parameterization of the input data, which serves as the baseline configuration for both the classical THB-Spline method and the proposed hybrid approach.
The refinement process is guided by a user-defined error threshold
The iterative fitting procedure is terminated when no significant reduction in the approximation error is observed or when the maximum admissible refinement level
All comparative experiments are conducted using identical spline degrees, refinement criteria, and admissible refinement depths for both the classical and hybrid approaches, ensuring a fair and consistent evaluation.
Additional sensitivity analyses, including the influence of
Results and discussion
All numerical experiments employed a data set of size
Local parametric optimization within each refinement subdomain
An error threshold of
Fitting accuracy was assessed using the root mean squared error


All procedures were implemented in Cython with C/C++ extensions and executed on a Linux-based workstation (Debian 12) equipped with a Quad-Core Intel ® i7-1165G7 processor at 4.70 GHz and 16 GB of RAM. The numerical examples presented in the following sections were selected for their distinct topological characteristics, enabling a systematic demonstration of the flexibility, robustness, and accuracy of the proposed hybrid fitting framework.
To evaluate the performance of the proposed framework, a comparative analysis with classical THB-Spline fitting is presented in Table 1. The classical baseline corresponds to recursive THB-Spline parameterization with the initial equidistant parametric values, whereas the hybrid result corresponds to the best-performing configuration obtained after introducing parametric optimization. Since both approaches are evaluated on identical matrix datasets, using the same spline degree, refinement subdomains and admissible refinement depth, the comparison isolates the effect of parametric correction on fitting accuracy and model complexity.
Benchmark comparison between classical THB-Spline fitting and the proposed hybrid framework on identical datasets.
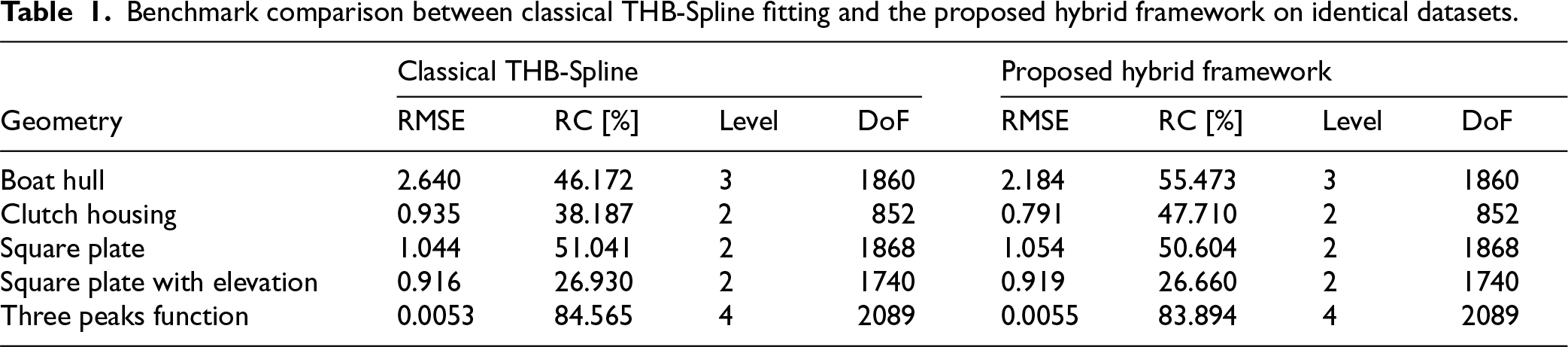
The results demonstrate that the hybrid framework outperforms the classical THB-Spline baseline on geometries where parameterization distortion is a dominant source of error, such as the boat hull and clutch housing. In contrast, for geometries characterized by dense local variations, both methods converge to comparable solutions once the same refinement depth is reached. This behavior highlights the topology-dependent interaction between parameter correction and hierarchical refinement.
The key solver settings, stopping criteria, perturbation parameters, and refinement thresholds used in the experiments are reported in Section 5.4 and detailed in Appendix B. The structured matrix datasets and implementation details required to reproduce the reported results are available from the authors upon reasonable request.
The first numerical example considers the reconstruction of a boat hull geometry, representing a moderately complex surface characterized by a dominant bow feature and several longitudinal ridges converging at the bow. The input point cloud comprises 4111 data points, and the initial control point grid was set to
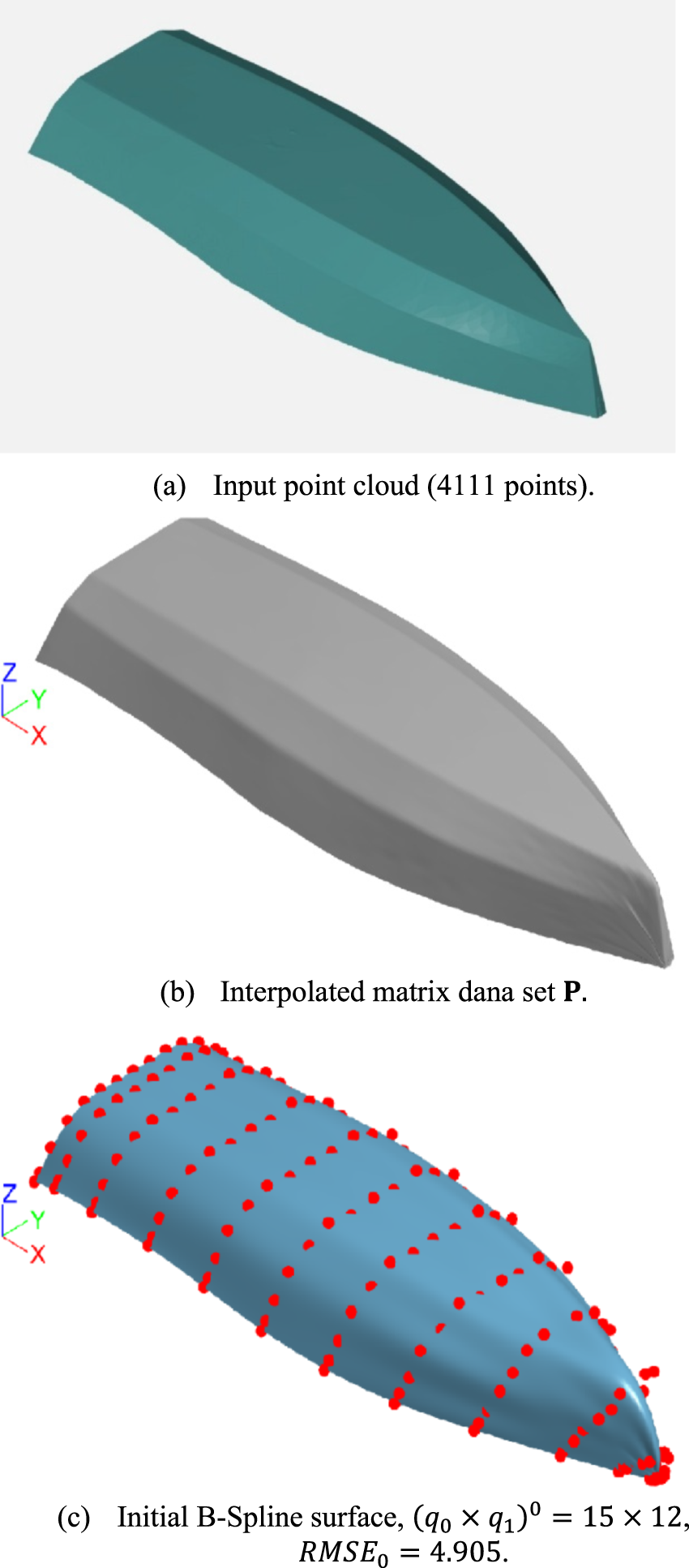
Boat hull geometry: input data and initial B-Spline fit.

Global parametric optimization results for the boat hull geometry.
Global parametric optimization results for the boat hull geometry.

Based on the error distribution and with parametric distance threshold

Definition of the THB-Spline refinement subdomain for the boat hull geometry.

THB-Spline surface with initial B-Spline control points (red) and first-level refinement control points after local optimization (green).
THB-Spline parameterization and local parametric optimization results for the boat hull geometry.

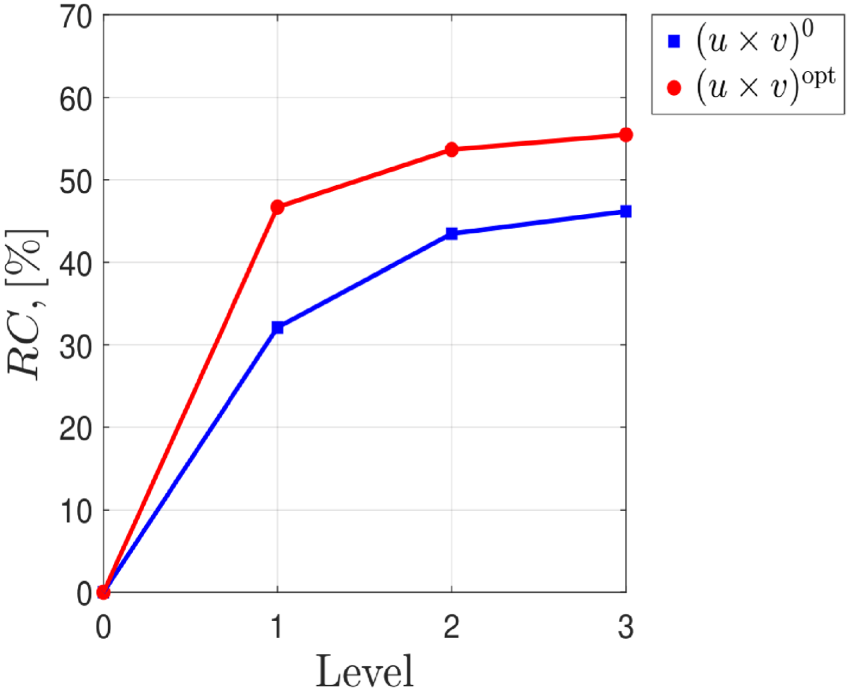
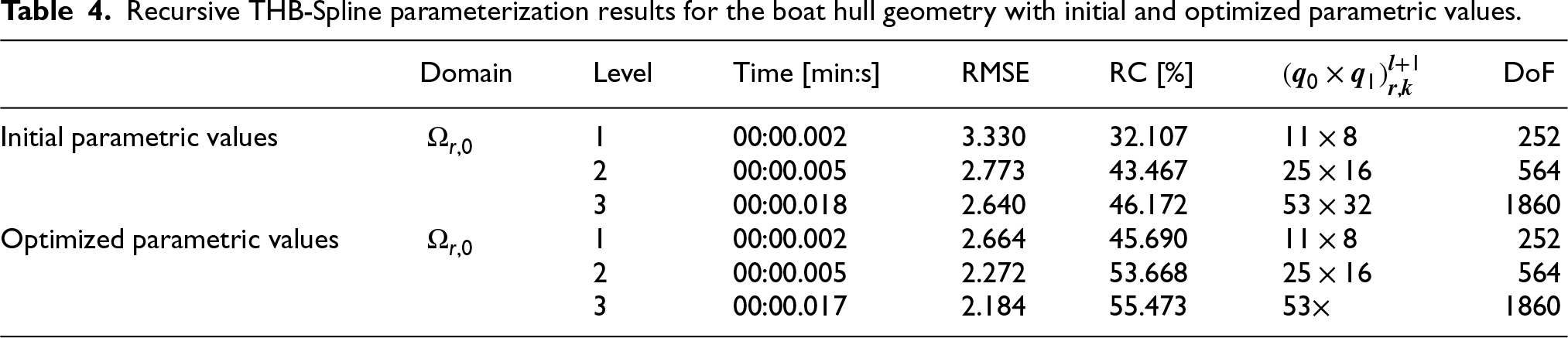
Recursive\enlargethispage{-18pt} THB-Spline parameterization was subsequently performed independently for both the initial and globally optimized parametric configurations. Results up to the maximum admissible refinement level, determined by the data grid resolution and subdomain size, are reported in Table 4 and illustrated in Figures 14 and 15. Three refinement levels were attainable within the given subdomain. The optimized parametric configuration consistently outperformed the initial one at each level, achieving

Recursive THB-Spline surfaces at maximum refinement level; red dots denote initial B-Spline control points, green dots denote final refinement level control points.
Recursive THB-Spline parameterization results for the boat hull geometry with initial and optimized parametric values.
The spatial distribution of the Euclidean distance error at each stage of the fitting procedure is presented in Figure 16, providing a visual assessment of the progressive reduction in geometric deviation achieved by the proposed hybrid framework.
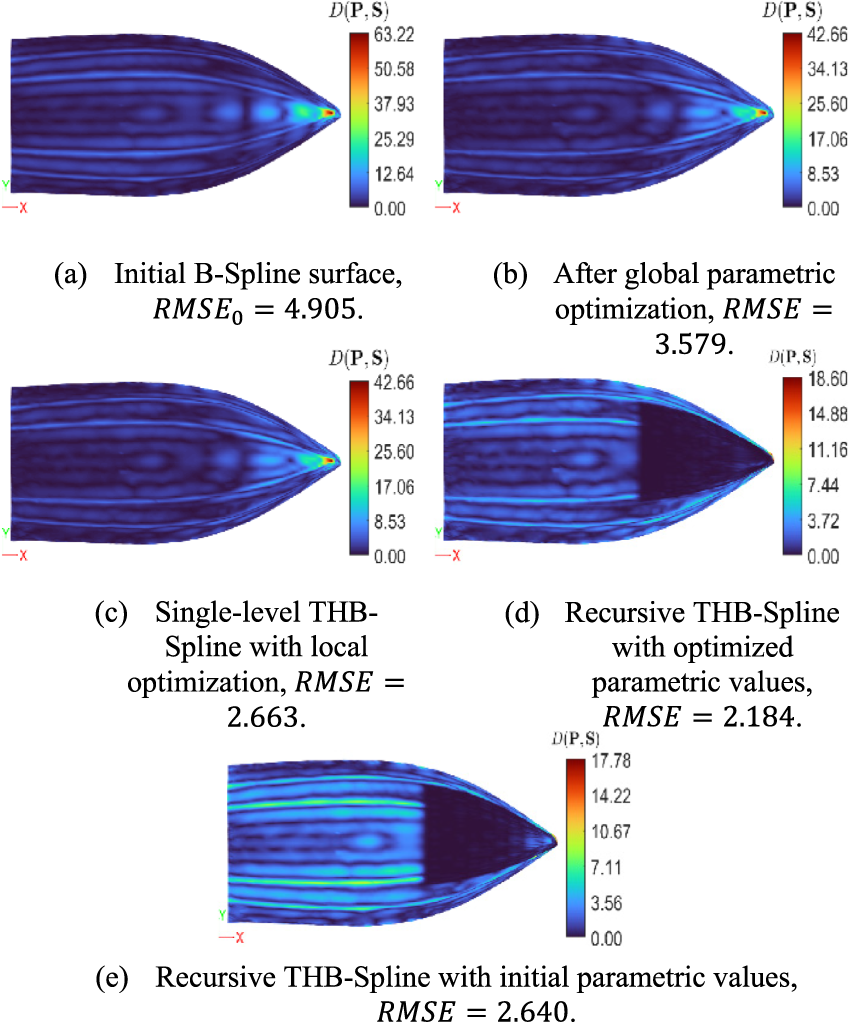
Euclidean distance error distribution at each stage of the hybrid fitting procedure for the boat hull geometry.
The second numerical example considers the reconstruction of an asymmetric half of a clutch housing geometry. Clutch housings are typically cylindrical components with smooth surface transitions; the half containing three asymmetrically positioned bolt features was selected, as these constitute dominant geometric irregularities inducing a nonuniform surface distribution. The input point cloud comprises 34,249 data points, and the initial control point grid was set to
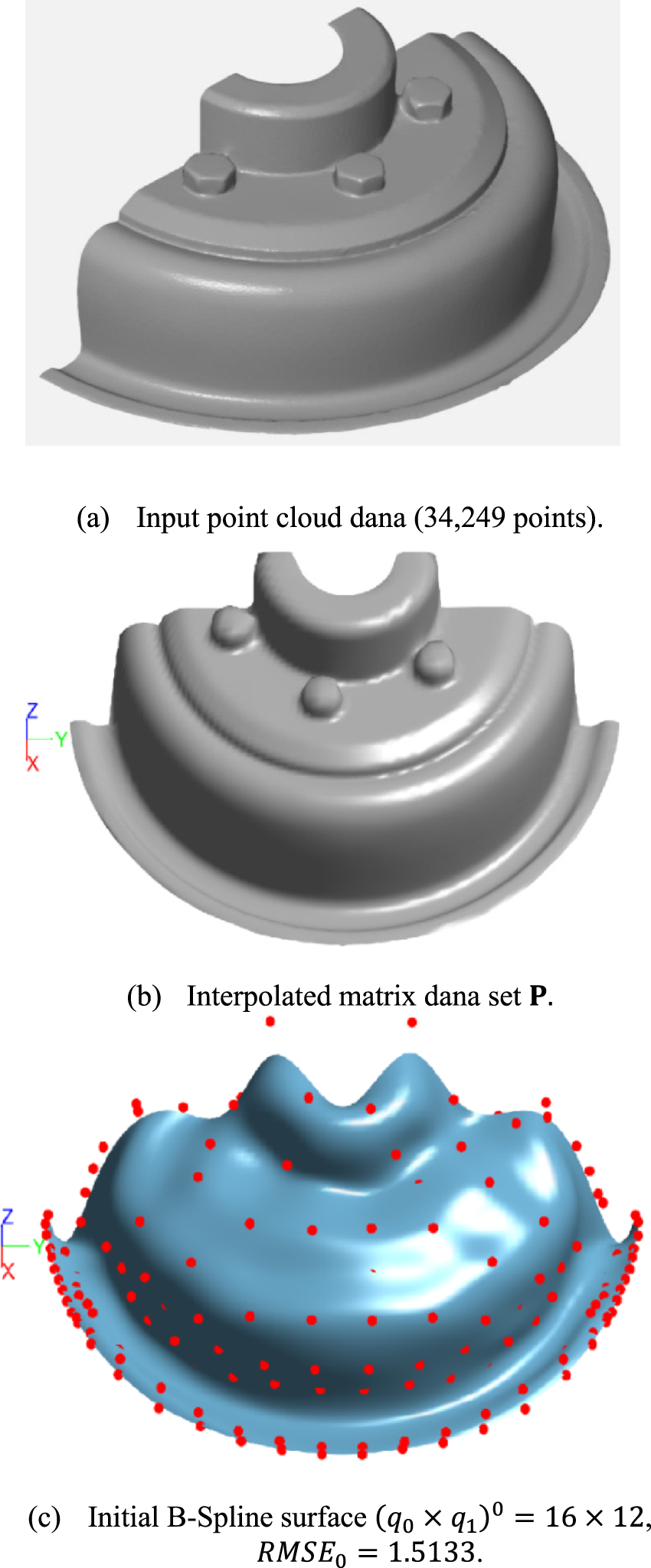
Clutch housing geometry: input data and initial B-Spline fit.

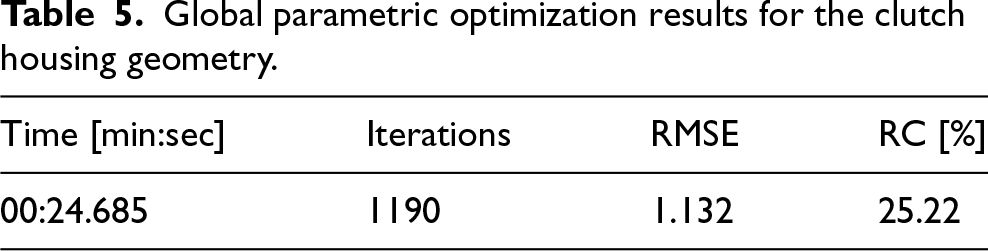
Global parametric optimization results for the clutch housing geometry.
Global parametric optimization results for the clutch housing geometry.
Based on the error distribution and

Definition of the THB-Spline refinement subdomain for the clutch housing geometry.
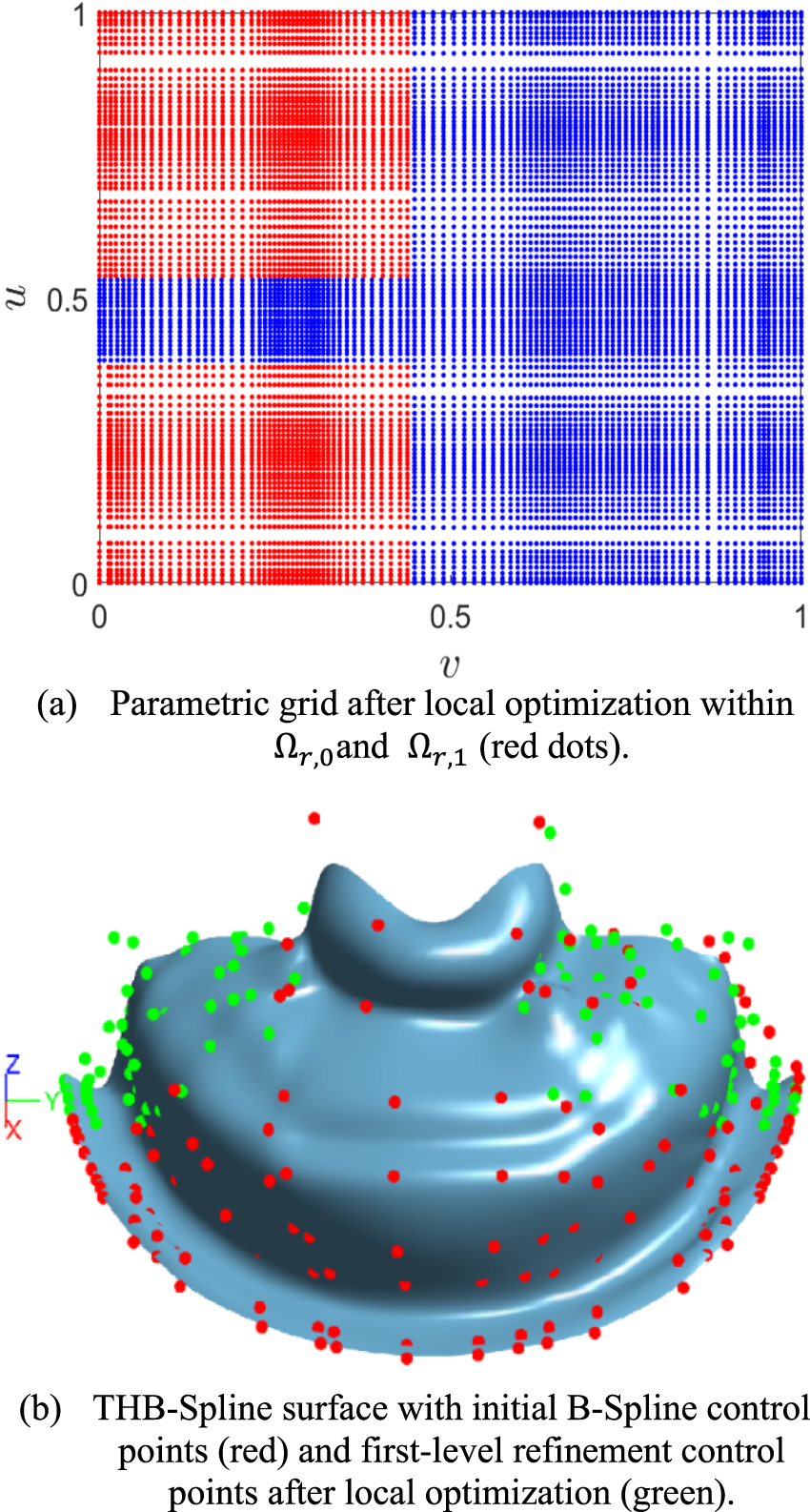
Local parametric optimization results within the THB-Spline refinement subdomain.
THB-Spline parameterization and local parametric optimization results for the clutch housing geometry.

Single-level THB-Spline parameterization reduced the RMSE by 40.01%. Local optimization was performed sequentially, first for
Recursive THB-Spline parameterization was likewise performed sequentially, beginning with


Recursive THB-Spline surfaces at maximum refinement level; red dots denote initial B-Spline control points, green dots denote final refinement level control points.
Recursive THB-Spline parameterization results for the clutch housing geometry with initial and optimized parametric values.

The spatial distribution of the Euclidean distance error at each stage of the fitting procedure is presented in Figure 23, demonstrating the progressive reduction in geometric deviation across all fitting stages, with particular improvement evident along the housing edges and around the bolt regions.
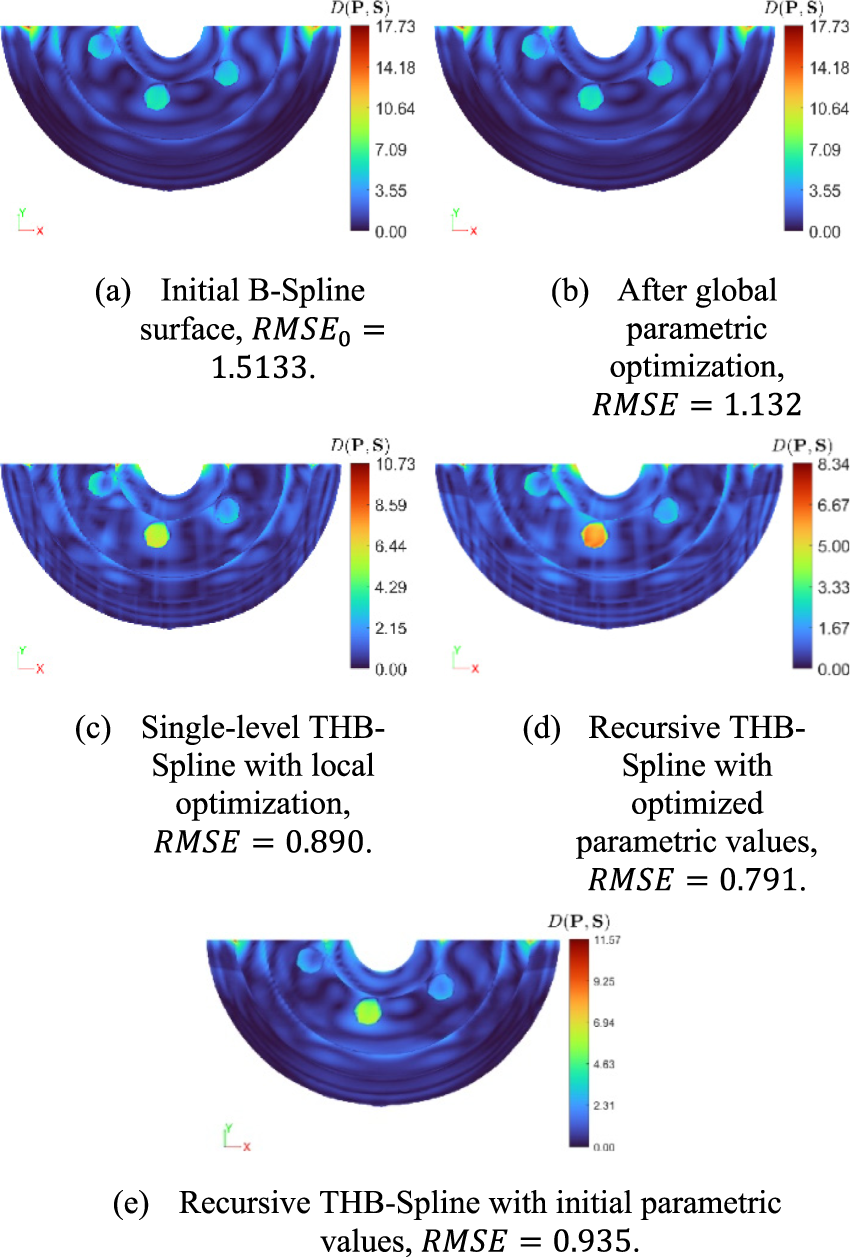
Euclidean distance error distribution at each stage of the hybrid fitting procedure for the clutch housing geometry.
In the proposed fitting procedure, first thing that requires more attention is the mapping and interpolation procedure. The implemented mapping and interpolation procedure demonstrably introduces non-negligible information loss, as evidenced by systematic discrepancies observed across multiple test cases. Presented interpolation is done linearly on the uniform grid size, without any focus on the geometric feature, where the influential loss of data occurs. This can be improved by applying different interpolation procedure which should focus on geometric features. 12
The recursive THB-Spline parameterization using the initial parametric configuration serves as a baseline representing purely hierarchical refinement without parametric optimization. Using the same refinement levels allows a direct comparison with the proposed hybrids trategy and isolates the influence of parametric optimization on the fitting performance. The classical THB-Spline parameterization using the initial parametric configuration serves as a baseline representing purely hierarchical refinement without parameter optimization. This enables a direct comparison and isolates the influence of parametric optimization on fitting performance. For further reference, Appendix A provides a benchmark approximation from standard THB works, reporting computational results in terms of error reduction and degrees of freedom, and distinguishing the advantages and limitations of the proposed hybrid method relative to existing approaches.
The sensitivity of the proposed method to geometric topology is consistently observed across multiple test cases, most notably during the global optimization of parametric values (Appendix A). For geometries exhibiting highly distinct geometric features, the global optimization stage fails to yield a significant reduction in approximation error (RC < 10%), rendering the framework predominantly reliant on classical THB-Spline refinement in such configurations. Two contributing factors to this limitation are identified. First, the Levenberg–Marquardt implementation employed in the proposed framework is sourced from an external library, whereby the gradient of the objective function is evaluated numerically rather than analytically; this contrasts with the original formulation 12 in which analytical derivatives with respect to the knot vector are used, yielding a more accurate and efficient gradient computation. Second, further tuning of the Levenberg–Marquardt hyperparameters, or the adoption of alternative optimization strategies better suited to complex geometric topologies, represents a viable direction for future improvement.
Within the proposed framework, selection of the optimal fit is delegated to the user, who determines the most suitable approximation result by balancing the trade-off between RMSE reduction and the number of active degrees of freedom (i.e., control points). The framework is formulated on the basis of sum-of-squares error minimization for computational simplicity; however, alternative objective functions incorporating weighted combinations of approximation error and model complexity can be readily constructed to accommodate more specific requirements. An additional constraint in the form of a maximum number of allowable refinement levels is also admissible, and is inherently bounded by the data grid resolution
The THB-Spline representation, truncation mechanism and local least-squares refinement procedure used in this work are inherited from earlier studies on hierarchical spline fitting.3,25,32 The novelty of the present work lies in coupling THB refinement with local parametric optimization used as a decision step prior to refinement, together with a complexity-oriented analysis and a topology-aware evaluation of the interaction between parameter correction and local hierarchical enrichment.
Although the framework is designed to maximize automation, several critical thresholds require user-defined input, most notably during the identification and definition of refinement subdomains. The incorporation of machine learning techniques to eliminate this dependency on expert judgment represents a promising direction for future research, with the potential to further enhance the degree of automation within the fitting procedure.
Conclusion
This work demonstrates that effective hierarchical spline reconstruction requires distinguishing geometric under-resolution from parametric distortion, a distinction that classical THB-Spline refinement does not make. Because standard refinement responds uniformly to all fitting error, it often introduces unnecessary subdivision, increasing the number of control points and the hierarchical depth. The proposed hybrid framework addresses this by first analysing the origin of the error and then applying an appropriate corrective action. Local parametric optimization is used to reduce mapping distortion, while refinement is invoked only when geometric limitations prevent further improvement. Through truncation, refinement remains confined to selected regions, so only the associated control points are recomputed. In practice, this leads to substantially fewer refinement operations, a lower number of degrees of freedom and more coherent spline representations, without changing the asymptotic complexity of THB refinement.
The numerical examples confirm that the method performs robustly on geometries with pronounced curvature variation, localized features and complex topology. The interaction between parameter optimization and localized refinement yields surfaces with improved local fidelity and more uniform control-point distribution, which is valuable in CAD and CAE workflows where model stability and interpretability are important. The framework can operate in a largely automatic mode, suitable for batch or pipeline integration, but also supports user-controlled refinement depth and subdomain selection for expert-driven reverse engineering and design tasks.
The present study is focused on validating the hybrid fitting strategy within the scope of parametric optimization and truncated hierarchical refinement, using a specific optimization and refinement configuration. A more detailed analysis of worst-case computational complexity, as well as systematic benchmarking across a broader range of industrial cases, is left for future work. Further extensions may include anisotropic refinement criteria, more advanced decision metrics for switching between optimization and refinement, and generalizations to volumetric or networked spline representations. Overall, the results show that integrating parametric optimization with localized hierarchical refinement provides an efficient, tunable and engineering-oriented approach to freeform surface reconstruction, achieving higher accuracy with lower model complexity than classical hierarchical fitting.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Croatian Science Foundation under the project [HRZZ-IP-2022-10-8856].
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.