
Abstract
Complex Cyber-Physical-Human System (CPHS) integrate the human operator as an essential element to assist with different aspects of information monitoring and decision making across the system to achieve the desired goal. A crucial aspect of enhancing CPHS efficiency lies in understanding the interaction dynamics of human cognitive factors and Cyber-Physical Systems (CPS). This entails designing feedback mechanisms, reasoning processes, and compliance protocols with consideration of their psychological impacts on human operators, fostering shared awareness between humans and AI agents and calibrating feedback levels to ensure operators are informed without being overwhelmed. This study focuses on a specific CPHS scenarios involving a human operator interacting with a swarm of robots for search, rescue, and monitoring tasks. It explores the impact of swarm non-compliance rate and feedback levels from the robotic swarm on the human operators’ cognitive processes, and the extent to which individual differences in information processing influence this interaction dynamics. A human subject study with 20 participants experienced in strategic gaming involved nine scenarios with randomized robot compliance and AI feedback levels was conducted. Cognitive factors, categorized into brain-based features (mental engagement, workload, distraction) and eye-based features (pupil size, fixation, saccade, blink rate), were analyzed. Statistical analyses revealed that brain-based features, particularly mental workload, were predictive of the effect of compliance level, while feedback level and expertise affected both eye features and brain cognitive factors.
Introduction
In the rapidly evolving landscape of technology, the interconnectivity between artificial intelligence (AI) and physical systems is continually expanding, significantly broadening the scope of Cyber-Physical Systems (CPS). While humans are often seen primarily as users within these systems, in complex scenarios—e.g., smart grids (Duan & Ayyub, 2020; Khalaf et al., 2024) and precision agriculture (Mhapsekar et al., 2024; Sreeram & Nof, 2021)—they become integral components that can observe/process information, provide feedback/reasoning, makes decisions, or perform physical tasks across the system to achieve system goals. This integration of human operators into CPS, resulting in Cyber-Physical-Human Systems (CPHS), is profoundly influenced by the level of intelligence embedded within the CPS agents.
At lower levels of autonomy, where humans are actively involved in the loop, the cognitive load on operators intensifies as they manage vast amounts of data from various sources (Endsley, 1995). The high volume of incoming information can overwhelm the human cognitive system, leading to potential misunderstandings, misinterpretations, or suboptimal decision-making (Amadori et al., 2022). Conversely, increasing system autonomy generally shifts the human role to the supervisory role. However, both over- and under-reliance on AI have had catastrophic consequences in real-world incidents (Parasuraman & Riley, 1997; Schemmer et al., 2023). Hence, a critical aspect of enhancing CPHS efficiency is optimizing the cognitive interface between humans and CPS. This involves designing feedback mechanisms, reasoning processes, and compliance protocols with an awareness of their psychological impacts on human operators. Such considerations are at the heart of cognitive engineering, which aims not only to ensure system functionality but also to address the human cognitive traits that influence interaction quality and effectiveness. In this regard, it is essential to develop reliable models for predicting human and system performance. These models can facilitate a shared awareness between humans and AI agents and can be applied either to maintain human involvement in operational loops (Chen et al., 2011; de Visser & Parasuraman, 2011; Prati et al., 2021; Su et al., 2022) or to calibrate the level of feedback, ensuring that operators are informed yet not overwhelmed by information (Camilleri et al., 2022; Chen et al., 2018; Lyons & Havig, 2014; Schemmer et al., 2023).
This paper focuses particularly on the latter approach, where human operators issue high-level decisions and CPS agents autonomously evaluate the feasibility of these commands based on their environmental perceptions. As shown in Figure 1, this process includes providing operators with feedback about the practicality and risks associated with their decisions. Maintaining operator trust and engagement in these collaborative efforts is crucial and is supported by the transparent communication of feedback, especially in instances of non-compliance (Nam et al., 2018). Such transparency not only promotes mutual understanding but also enhances situational awareness, aiding in more informed decision-making (Endsley, 2023).
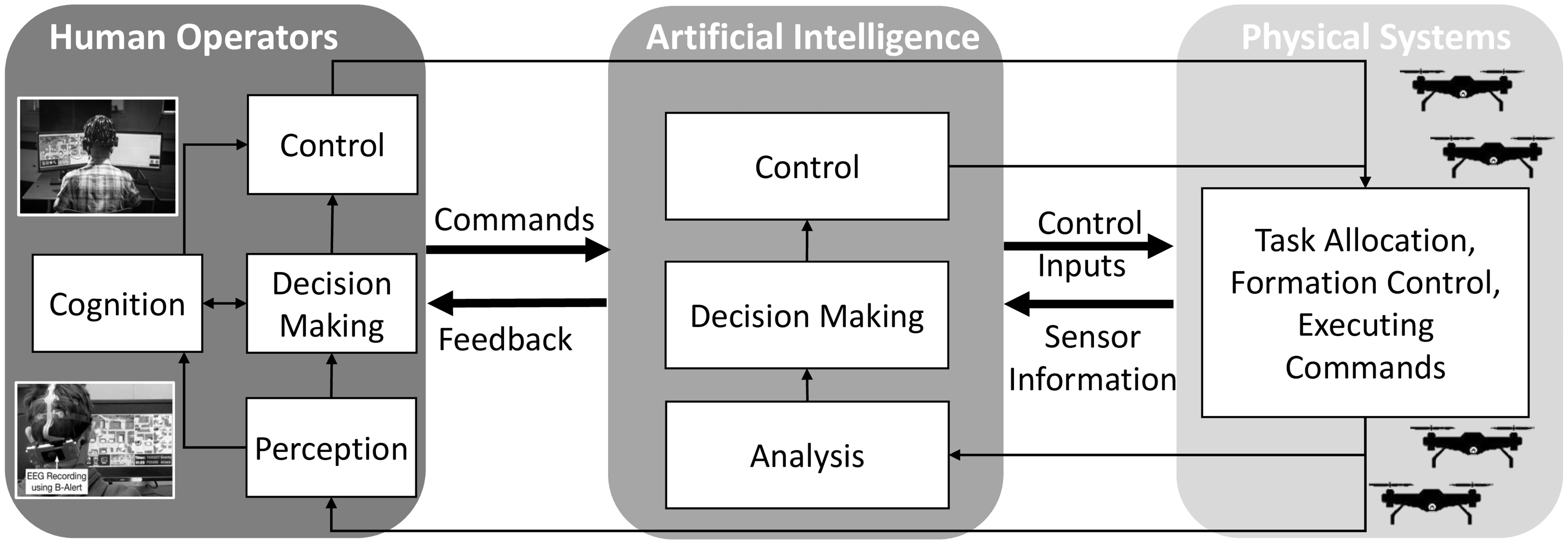
Information flow in the considered CPHS framework.
Another factor affecting the described scenario is the individual differences of the human operators in perception, cognition, and decision making. In visually demanding tasks and multi-tasking environments, individual differences in cognitive skills such as attentional control, spatial ability, working memory capacity, have shown a significant effect on human performances and need to be properly considered in the dynamic interactions of human and CPS (Chen & Barnes, 2014; Distefano et al., 2021; Green & Bavelier, 2007; McKendrick et al., 2014).
The specific CPHS considered in this study involves a human operator interacting with a swarm of robots for search, rescue, and monitoring tasks. In the case of teleoperation, human operator is ill-aware of the environment and has a supervisory control over the swarm or unmanned aerial vehicle. This case study is selected as the human and AI have two different levels of perception of the environment causing potential AI non-compliance that would require feedback to the user. This paper aims to explore several pivotal questions regarding the dynamics of human-swarm interactions within this defined framework:
The Impact of Feedback Levels: How do varying levels of feedback provided by the robotic swarm influence the cognitive processes and decision-making efficacy of human operators? Non-Compliance Rates and Human Cognition: What effects do various rates of non-compliance from the collective swarm behavior have on the cognitive load and decision-making performance of human operators? Individual Differences in Information Perception: To what extent do individual differences in information processing and perception influence the dynamic interplay between human operators and robotic swarms within CPHS?
The human subject study and the experimental framework is designed to encompass varied scenarios, manipulating two main factors: compliance rates and feedback levels, with feedback exclusively provided during instances of non-compliance. The main novelty of this paper is in studying the effect of AI non-compliance and AI transparency (provided through different levels of feedback) on human's cognition. Moreover, we demonstrate how the level of individual differences could affect this interaction dynamics. In general, the outcome of this study is expected to inform the design, and deployment of next-generation CPS systems by integrating human factors, thereby enhancing CPHS functionality. The interaction dynamic model studied in this paper can be utilized in future CPHS studies for adjusting the AI feedback and individualizing it to enhance the overall CPHS systems performance.
The rest of the paper is structured as following. We first describe the experimental framework used to conduct the human subject study including the physiological data collection and individual difference studies. Next, we present the results of the statistical analyzing on the effect of different levels of feedback, compliance, and individual differences on the cognitive metrics of the operator (workload, engagement and distraction) and finally, discuss the significance of these results for the case of human-swarm interaction and potential future work to expand it to the other CPHS.
Materials and methods
We established a framework to investigate teleoperator behavior and human physiological responses during human-swarm interaction. Leveraging our pre-existing SHaSTA platform (Manjunatha et al., 2024), we developed supplementary modules for adjusting the level of compliance of the robot agents and level of feedback that they will provide when the task is assessed to be infeasible. With these enhancements, we conducted a human-subject study tasking teleoperators with executing a search mission in an urban setting. Detailed descriptions of the simulation environment, design of experiment, physiological data collection and analysis are provided in the following sections.
Experiment framework
Our end-to-end experimental framework encompasses a simulation environment an interactive graphical user interface (GUI), physiological data measurement, and a real-time physics engine developed using open-source library PyBullet named SHaSTA, that is open-sourced for the community to utilize (Manjunatha et al., 2024). To facilitate communication between GUI and simulation, we employ a parameter server for all data exchange and synchronizing the physiological data with the simulation events and human commands. All the incoming information are saved and compiled using a lab streaming layer which time synchronizes all the information based of local times and sampling frequency and applies a global time stamp to all the compiled information. This allows for every stream of data to be compiled with one singular time stamp containing multiple samples of each stream and extract features associated with each event across different modalities. All modules run in parallel using the open-source library Ray. Further details are elaborated in the rest of this section.
Simulation environment
To conduct the human-swarm interaction study in the simulation environment, we utilized the SHaSTA (Simulator for Human And Swarm Team Applications), a versatile, open-source simulation platform designed to advance research in swarm learning and human-swarm interaction (Manjunatha et al., 2024). SHaSTA offers a comprehensive interface that allows both human operators and machine learning algorithms to direct and refine swarm tactics and behaviors. The platform incorporates a range of functionalities, including individual robot controls, swarm behavior primitives like formation control and path planning, and customizable interfaces for defining novel primitives. SHaSTA also has the capability to integrate and synchronize physiological data from human operators with robotic swarm simulations. This integration provides us to analyze the human-cognition in response to the events in the simulation environment. More information on SHaSTA can be found in (Manjunatha et al., 2024).
Graphical user interface
The primary graphical user interface (GUI) presented to the teleoperator is constructed using Pygame, as illustrated in Figure 2. This GUI features a 2D representation of the environment, feedback mechanisms, and a mission status grid. It retrieves swarm locations from the parameter server and visually depicts them on the 2D map for user reference. To assign target locations to platoons, users pause the game, draw a rectangle around the desired platoon, and select a target location. Subsequently, the target position, along with the allocated platoon information, is transmitted to the parameter server for task execution by the bullet engine. The feedback grid, situated on the right side of the screen, provides users with notifications whenever a platoon fails to follow their instructions. Further details on compliance and feedback are elaborated in later sections. Additionally, the score grid and time grid display the mission score and elapsed time, respectively.
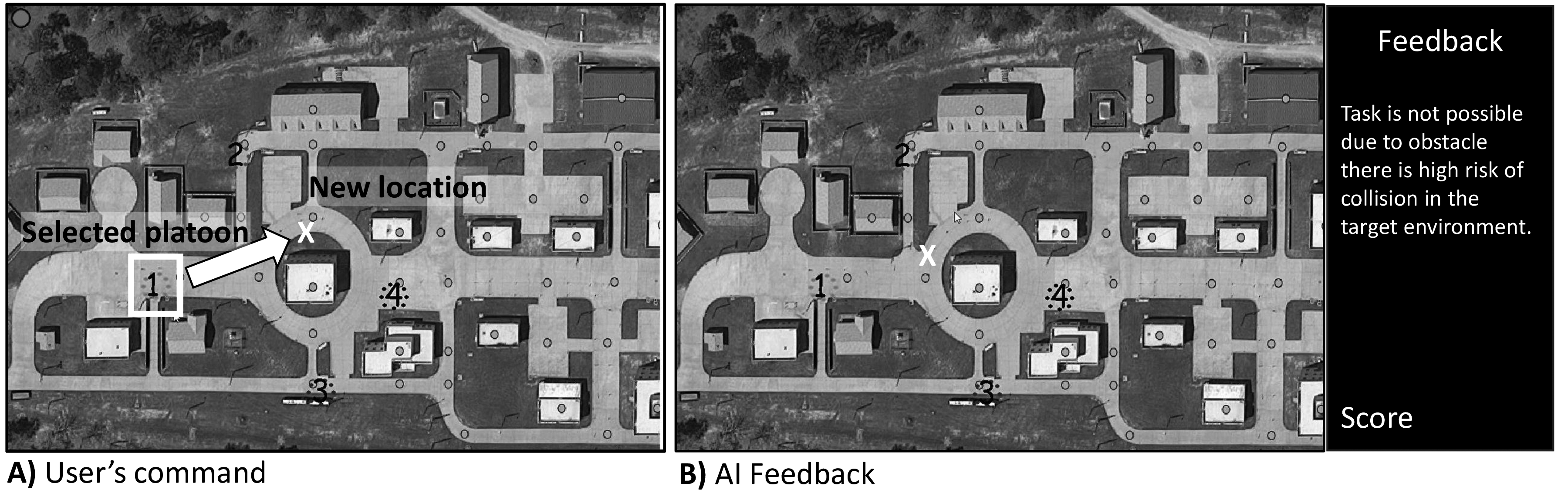
Interactive GUI used for A) Receiving user's command and B) Providing feedback in case of SWARM non-compliance.
Physiological data collection
In this study, we monitor participants’ brain activity using the non-invasive B-Alert X24 electroencephalogram (EEG) headset from Advanced Brain Monitoring®. This device records brain activity at 20 locations on the scalp, sampling at 256 Hz. These locations include O1, O2, P4, POz, P3, Pz, Cz, C3, C4, Fz, F3, F4, T6, T4, F8, Fp1, Fp2, F7, T5, and T3, following the 10–20 EEG location system. The EEG data are cleaned using independent component analysis to reject potential artifacts and then utilized to extract three different cognitive features: Mental Workload, Mental Engagement, and Distraction. These normalized features are extracted using a quadratic discriminant function analysis available within the B-Alert software, with participant-specific coefficients adjusted based on baseline tasks (Berka et al., 2004).
For eye tracking data, we employ a Tobii Pro Nano®. This eye tracker captures the user's gaze information at a rate of 60 Hz. It is securely affixed to the bottom of the monitor, and calibration is conducted before each gaming session to ensure accuracy. We extract 4 features namely fixation, blink rate, saccades, and pupil size from the eye tracking data.
Fixations are extracted by identifying clusters of consecutive points within a specific dispersion or maximum separation, using a sliding window of 11 samples (equivalent to around 360 ms). Saccades, corresponding to peaks in signal variance, are detected using a threshold of 7.5% of the maximum variance for each trial. Fixations are then defined as the period between two successive saccades, with a minimum duration of 120 ms. Optimal threshold values for variance and minimum fixation duration are determined through visual inspection of a random subset of recorded data. Fixation Rate denotes the number of fixations occurring within three-second time windows. Pupil Size is a relatively continuous measurement reflecting the visual complexity of a task. To address inter-subject variation, raw pupil size values are converted to z-scores for each participant. Additionally, to mitigate the impact of luminance fluctuations, the scene lighting is maintained at a consistent level throughout all experiment.
Individual differences
Variations in cognitive capabilities and visual search profoundly impact tactical decision-making. Specifically, differences in Visual Search (VS) and Multi-Object Tracking (MOT) have demonstrated significant implications for the performance and situational awareness of operators engaged with multi-robot systems (Memar & Esfahani, 2018), thus forming the basis for categorizing our participants.
Baseline tasks for VS and MOT were conducted at the outset of each human subject study. MOT assesses an individual's capacity to sustain spatial awareness of multiple objects in motion. An adept operator with a high MOT score can effectively monitor the majority of target objects amidst dynamic environmental changes. MOT evaluation involved presenting a scene containing several circles and requiring the identification and tracking of randomly selected target circles as they moved within the space. (see Figure 3A). VS evaluates a subject's capability to locate a predetermined object within a cluttered environment. Participants were presented with an image featuring a single T target letter amidst multiple distractors (shifted Ls in various orientations). They were allotted four seconds to locate the target and select the arrow key corresponding to the stimulus direction “T” (see Figure 3B). This test was repeated multiple times with different image configurations.
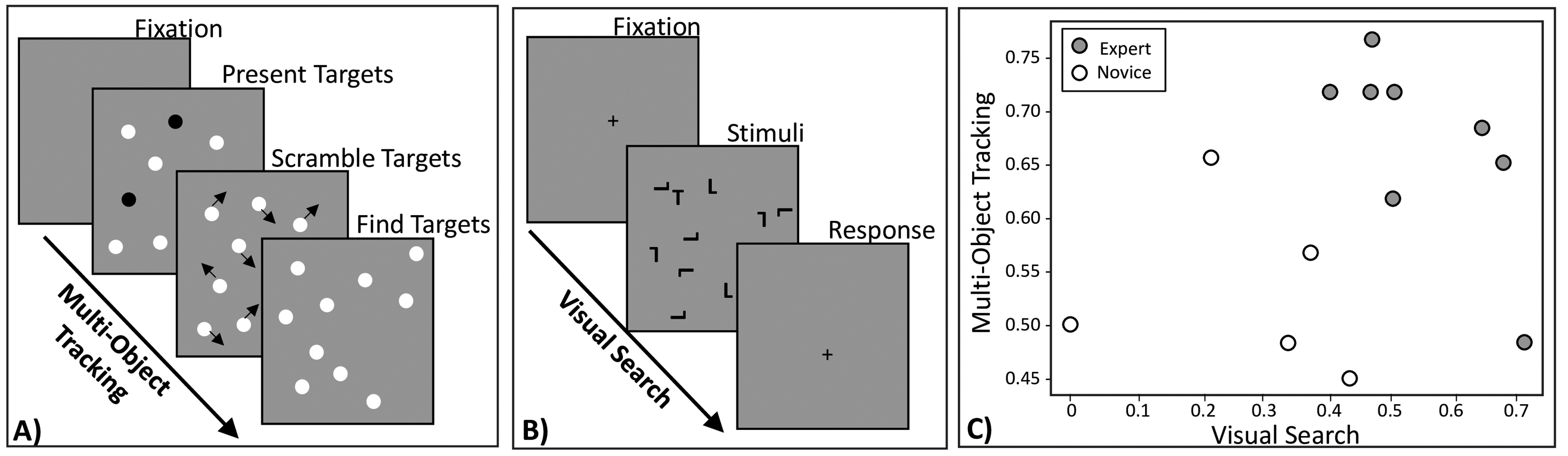
The baselines for individual differences. (A) Multi-Object Tracking (B) Visual Search. (C) Categorizing Subjects based on their VS and MOT scores into Novice and Experts using a K-Mean Clustering.
Participants are divided into two groups of novice and expert based on their VS and MOT scores. The average VS and MOT scores were utilized for this purpose using K-means clustering. It should be noted that the novice and expert labels do not reflect the subject's expertise in utilizing the simulation environment (as they are screened to be advanced gamers) but rather their cognitive skills. The schematics of the individual difference experiment for MOT and VS are shown in Figure 3A and B, respectively. Figure 3C indicates the individual difference scores of the subjects and their categorization into novices and experts.
Design of experiments
In our human-swarm interaction study, we task the subjects with the supervisory control of multiple platoons to search an urban environment for targets within a fixed time and locate as many targets as possible. An urban environment was chosen for this study due to the predominant applications of human-swarm interaction in outdoor environments, but the simulator allows for any other type of environment that requires a swarm of drones to be used for exploration. We study the effect of compliance rate (3 levels), the feedback level (3 levels) - provided by CPS in the case of non-compliance- and individual differences (2 levels) – categorized based on the VT and MOT test on the human cognitive factors. The cognitive factors considered in our observations include mental workload, mental engagement and distraction (grouped as EEG metrics) and pupil size, fixation, saccade and blink rate (grouped as eye metrics).
In a human subject study approved by the Institutional Review Board, we recruited 20 participants from the University at Buffalo student body, all of whom were gamers experienced in strategic computer gaming. Prior to participation, individuals confirmed their above-average gaming proficiency through a preliminary screening process. To acclimate participants to the new gaming environment, they were tasked with playing the human-swarm interaction game before the experiment, demonstrating proficiency in the controls. Additionally, all participants possessed normal or corrected vision to ensure the reliability of eye tracking data. Each subject participated in 18 experiments which was 2 trials for each of the 9 scenarios (3 feedback levels×3 compliance level). These experiments were block randomized and used in the same sequence for all the subjects. After completing each experiment; subjects completed a NASA-TLX survey, rating their perceived mental, physical, and temporal demands, as well as their effort, performance, and frustration during the session.
The feedback levels (low, medium, high) were designed to progressively provide increasing amounts of information to the user. At the low level, minimal information was provided, such as “battery low” or “faulty actuator,” offering limited insight into why a platoon couldn't perform a task. Medium-level feedback suggested the user re-evaluate and utilize a different platoon, while high-level feedback provides detailed information (such as battery levels and distance to the target) about not only the selected robot agents but also other available agents so the user can potentially study them and consider other alternatives. Battery level and platoon health were calibrated based on distance, allowing the user to explore most of the environment until platoons depleted their batteries.
The compliance model in the simulation involved randomly denying the user's actions 50%, 70%, and 90% of the time. Both the feedback and compliance levels were varied across the iterations to analyze their impact on task performance and user experience. To study how physiological data is affected by different levels of feedback and compliance, we must consider the human cognition during moments where the robots were non-compliant. The seven cognitive features (workload, engagement, distraction, pupil size, number of fixations, saccade and blinks) - described in section 2.2 - are extracted from a 3 s window after the AI provide feedback due to noncompliance.
Results of statistical analysis
A statistical analysis was conducted to investigate the main effects of feedback and compliance level on the cognitive features. This analysis also allows for the understanding of individual differences in cognitive features between experts and novices in cyber physical systems where the human has lack of awareness of the environment. For this purpose, eye movement, and EEG metrics are separately subjected to a series of 2 × 3 × 3 (Individual differences × feedback level × compliance level) multivariate analysis of variance (MANOVA) with individual differences as between-subject factor, whereas feedback level and compliance level are assigned as within-subject factors. When significant results are identified, multiple univariate ANOVAs are conducted for each dependent variable as a follow-up procedure to interpret the multivariate effect. To protect against Type-I error inflation due to conducting multiple univariate tests, Bonferroni adjustment of the alpha value (α / number of dependent variables) is imposed. This adjustment leads to α = .0125, .0167 for eye features and EEG features, respectively.
MANOVA reveals statistically significant main effects of feedback level, expertise and their interaction on both eye features as well as brain features. Compliance level however had only significant effect on the brain features but not on eye features. The detailed statistical analysis of the significant main effects performed by the MANOVA, and the follow-up ANOVA analysis are listed in Table 1.
Results of Statistical Analysis.

The follow-up ANOVAs for eye features reveal a significant main effect of feedback level on number of blinks (F(3,1812) = 5.793, p-value < 0.0001,
The follow-up ANOVAs for cognitive features extracted from brain activities reveal a significant main effect of feedback level on mental workload (F(3,1149) = 5.291, p-value = 0.0012,
Moreover, the interaction of feedback level and individual differences indicates significant effect on workload (F(3,1149) = 6.801, p-value = 0.0001,
The results of the cognitive factors with significant interactions between feedback level and individual differences are shown in Figure 4. In this figure, feedback level 1, 2, 3 refers to low, medium and high feedback level respectively. It can be seen that increasing the amount of information to the experts causes a higher average workload however, in the novices as the amount of information is increased the average mental workload is decreased. This indicates that additional information is mainly being ignored by the novices at the higher level of feedback.
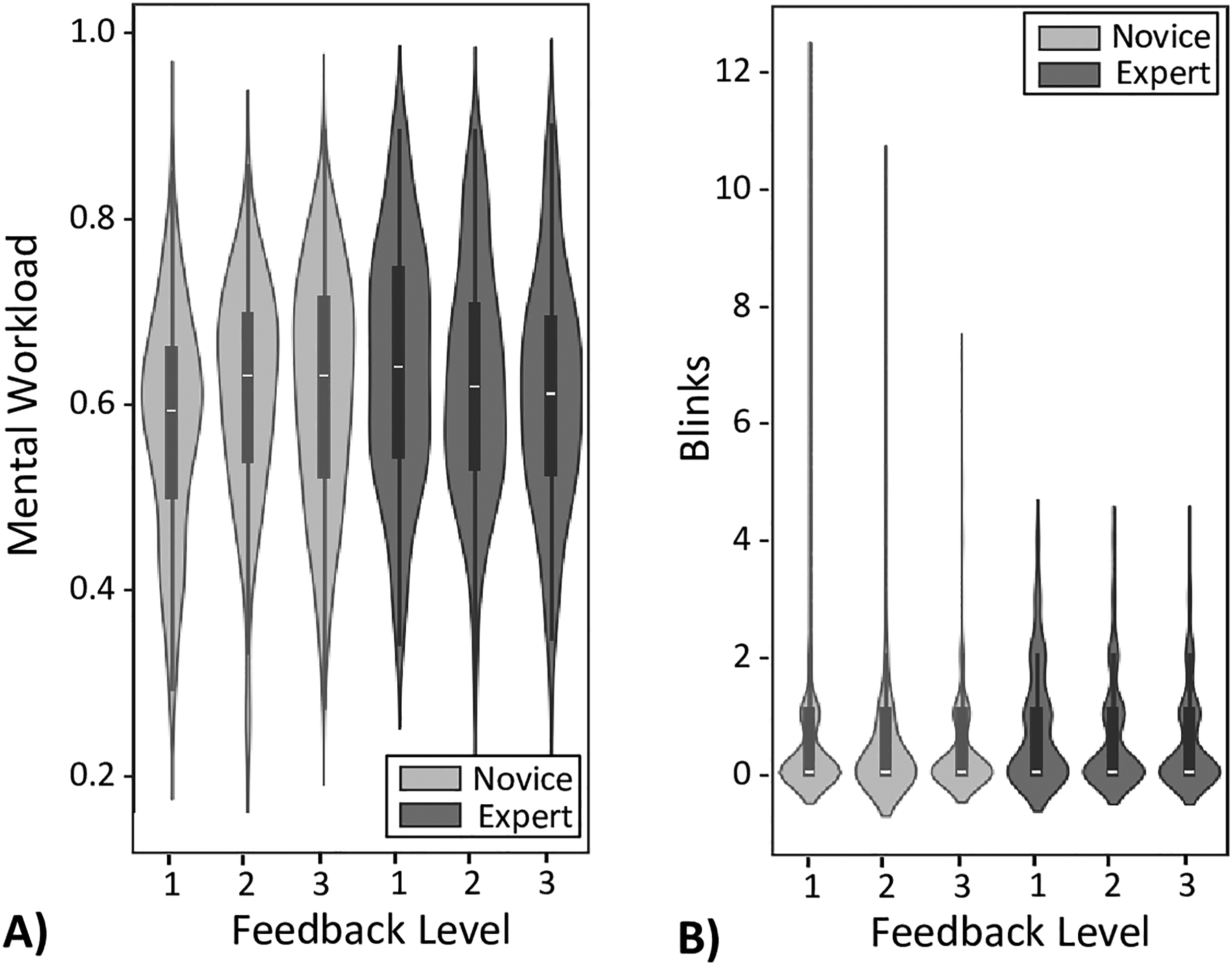
The significant interaction between feedback level and individual differences demonstrated for A) Workload and B) Number of Blinks.
As shown in Table 1, the main effect of individual difference showed significance in both the EEG and eye features and with five of the seven cognitive features (dependent variable) in the follow up ANOVA. Figure 5 shows the difference between the cognitive features that are significantly different for Experts and Novices.
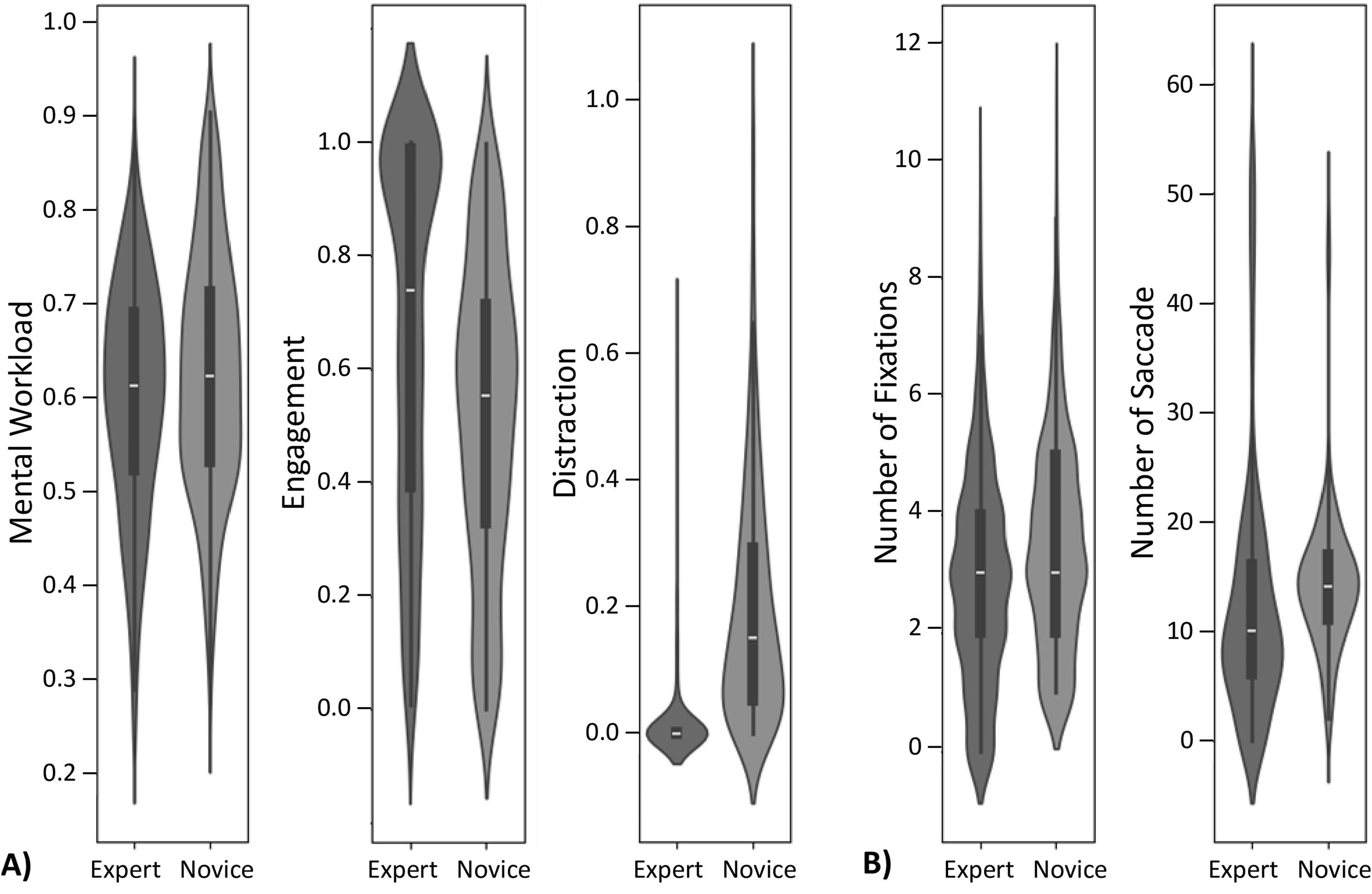
Significant physiological data derived from the MANOVA results where individual difference was the main effect A) Significant EEG Features B) Significant Eye Features.
Figure 5A illustrate the difference between cognitive features extracted from brain activities for experts and novices. It can be seen that experts are more engaged (and less distracted) and experience relatively less workload (averaged over all scenarios) during the short interval (3 s window) after the AI feedback is provided. The eye movements of the experts are also associated with less number of fixations and saccade comparing to the novices as seen in Figure 5B. The combination of these two factors indicates that in general the experts are paying more attention to the feedback provided while the novices are looking for an alternative solution while ignoring the AI feedback that is associated with higher eye activities (both saccade and fixation number), higher workload, higher distraction and less engagement.
The MANOVA analysis yielded that the dependent variable of performance measured through NASA-TLX was only significantly affected by the compliance level. As seen in Figure 6, experts do not perceive a difference in temporal demand when the swarm is less compliant. On the other hand, novices report a much higher temporal demand when the swarm is less compliant. This is also in agreement with the previous findings that novices are in general more distracted and less engaged with the AI feedback and trying to find an alternative by exploring the environment resulting in a higher eye movement more workload and an increase in the perceived temporal demand.
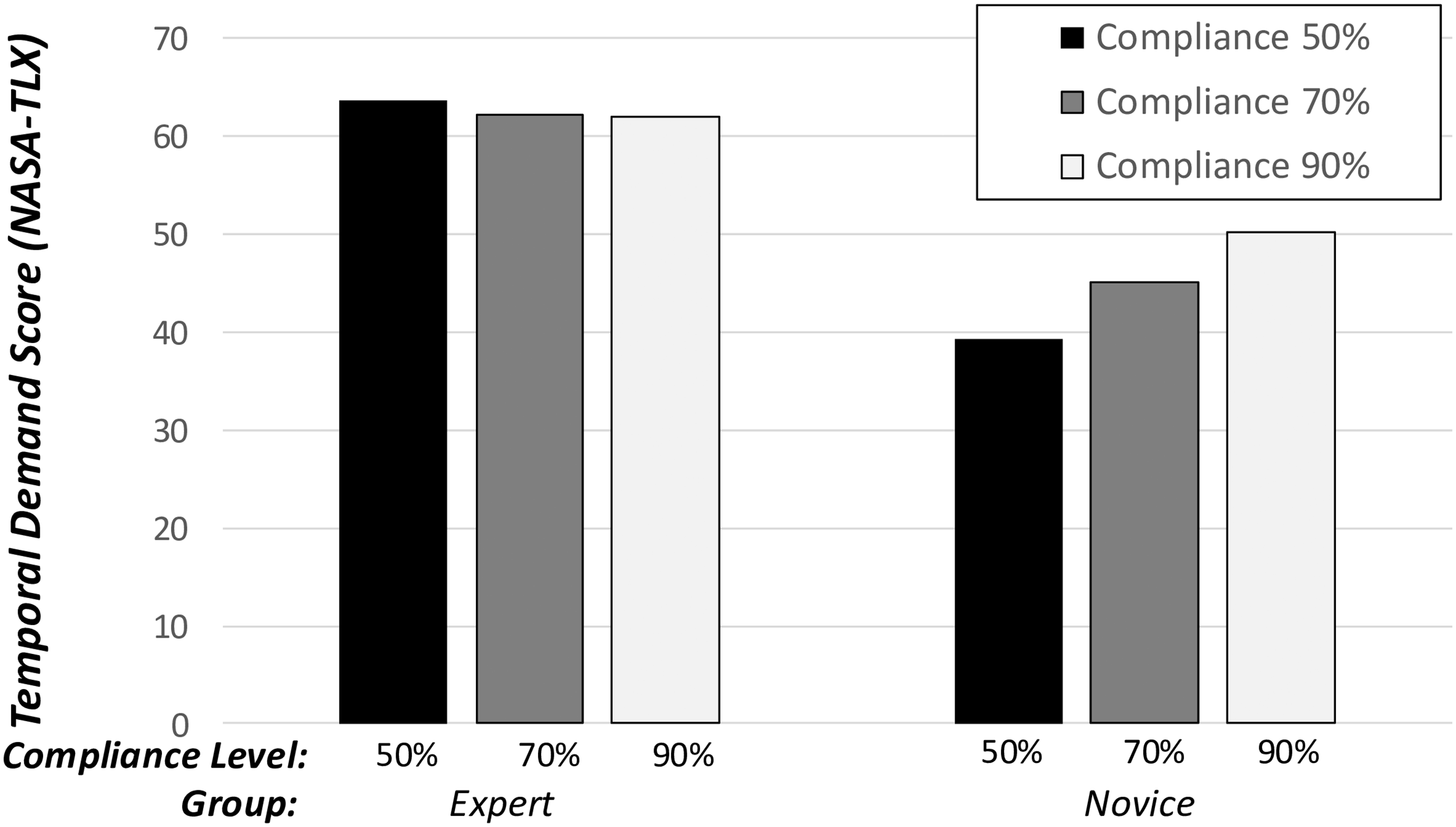
NASA-TLX results for significant effect (temporal demand) for both Expert and Novice.
Discussion
Let's recall the three fundamental questions that we asked in relation to the human-swarm interaction in the CPHS framework. We were interested in examining if the non-compliance rate and the level of explanation provided by AI for the non-compliance will affect the human cognitive factor and to what extent the individual differences would affect this dynamic interplay between human operators and AI behavior. The statistical results presented in Table 1 indicates that between non-compliance level and the level of feedback (explanation) provided by AI, feedback level has a more comprehensive effect on the extracted cognitive factors effecting both eye movements features and mental workload whereas the compliance level only significantly affect the mental engagement.
Interestingly, we observed that individual differences not only significantly affect the majority of cognitive features but its interaction with feedback level has significant effect on workload and number of blinks. In Figure 4, we observe that experts’ workload rises from feedback level 1 but does not rise from feedback level 2 to 3. We also observe that novice workload reduces with more informative feedback. In regard to the novice, we conclude that novice participants do not try to process the information from the feedback and immediately select another platoon. On the other hand, expert subjects are able to process the feedback, gain insight on the environment, and make an educated decision, nevertheless, it is seen that going from environmental information to advising a decision (feedback level 2 to 3) does not raise the workload. This is an important finding in terms of human-AI teaming. Current studies in explainable AI have shown that in human-AI teaming accepting or rejecting the AI suggestion/feedback is tied to several factors such as cognitive biases, unbalanced trust or cost-benefit balance in the mutual task (Buçinca et al., 2021; Vasconcelos et al., 2023). It has even been argued that explainable AI would be more accepted “if it is easy to understand” (Okolo et al., 2024). Our paper shows that individuals with lower VS and MOT score (referred to as novices) have the tendency of ignoring the AI explanation and try to figure an alternative approach as it was evident in the increases in both number of fixation and saccade accompanied by higher distraction and lower engagement. It should be noted that our AI feedback provide information that needed to be processed for making a new decision rather than providing an alternative solution. The associated cognitive features can therefore be utilized to design a proper explanation engine to keep the human in the loop.
Additionally, we see that blink rate is much higher in experts for all levels of feedback than novices. This trend aligns with current literature in eye blinks and eye tracking. Marquart et al. (2015), Faure et al. (2016) and Recarte et al. (2008) all report that blink rate increases when dealing with dual-tasks (cognitive task plus visual search) and secondary tasks. This aligns with our research because processing the feedback is a secondary task. The primary task the user is focused on is supervising the platoons to search the environment and the secondary task is locating, processing, and making a decision based on this feedback. We take this research one step further and say that we see this trend more in experts than we do in novice subjects.
Figure 6 shows the only significant feature being temporal demand from the NASA-TLX. It should be noted that the MANOVA analysis was also run on the NASA-TLX surveys as a main effect but was not included in the results due there being no significant results besides the temporal demand. This contradicts the previous results due to the significant changes in the physiological information due to different levels of feedback and compliance. This is an indication that humans’ perception of their performance is not an accurate measurement system where there are multiple cases of non-compliance.
Conclusion
In this paper, we present a framework for studying and analyzing multimodal physiological data monitoring in human swarm interaction. In this study the human was put into a supervisory control position with lack of awareness of the environment and relied on the swarms to provide feedback on actions that are not feasible. Furthermore, we analyzed the physiological data using statistical analysis to determine how different levels of feedback and compliance affect the human cognition. Our approach also considered individual human differences and revealed how domain expertise has a significant impact on the operator cognition.
While the primary focus lies in elucidating the multifaceted factors influencing human-swarm interaction dynamics, it is important to note that this study does not intend to construct a definitive model for such behavior. Rather the contribution of this paper is to provide foundational insights in understanding the human cognitive responses to AI non-compliance and the follow up feedback and dialog needed to engage the user. We showed that individual differences have a significant effect on the utilization of the AI feedback as evident in the change in eye movements and other cognitive features. Interestingly, these findings are also in agreement with studies in learning science where more capable student utilizes AI feedback more effectively (Bhutoria, 2022). Future works can benefit from the results of this study to design more engaging AI feedback based on the individual differences and potential observation of the user's cognitive feature.
In our study, EEG and eye-tracking methodologies are selected for their demonstrated efficacy in research, offering versatility for application across both stationary and dynamic CPS environments. Despite potential challenges associated with real-world deployment of physiological monitoring technologies, this study underscores the significance of understanding their effects in practical settings. By comprehensively unravelling the intricacies of human-swarm interaction, this research also paves the way for the development of cognitively aware CPS poised to revolutionize various domains.
While this paper was focused on teleoperation with swarm of robots in an urban environment as a case study, the findings of this research stretch far beyond the domain of human-swarm interaction. This research shares common application and use cases in manufacturing -smart factories, collaborative robots- (Garcia et al., 2019), health care -surgical robots, rehabilitation- (Long et al., 2023), search and rescue -disaster response-, agriculture -precision farming, livestock management- (Sreeram & Nof, 2021) and construction (Eskandar et al., 2020) in which a human interacts with multiple intelligent agent in a supervisory role. In all of these domains, knowledge on cognitive reaction of human to the AI behavior is needed to design an effective CPHS system. While our paper provide insight on the dynamics of human-AI interaction, further investigation would be needed for the adaptation of our findings in other relevant domains, particularly in multi-agent systems. There are also some recent studies on developing explainable AI to adjust the human reliance on AI advice via explanations (Schemmer et al., 2023) and Uncertainty Expression (Kim et al., 2024) that can be compared or combined with our cognitive approach in future work.
While previous studies have ventured into similar inquiries utilizing post-experiment questionnaires to adjust parameters retroactively, this paper endeavors to address these questions in real-time settings. Leveraging physiological measures such as EEG (Electroencephalography) and eye-tracking, alongside established metrics for assessing individual differences in cognitive processing, we find that the NASA-TLX surveys do not provide adequate or significant information on the human performance.
This paper builds a foundation for designing an effective system that can adjust its level of autonomy and feedback to provide the most assistance to human. By leveraging this knowledge, future AI systems could be developed with the capability to dynamically adapt their support mechanisms based on real-time assessments of human cognitive load and situational awareness. These systems could offer personalized assistance tailored to individual users’ needs, thereby reducing cognitive workload while simultaneously enhancing human awareness and performance. Furthermore, by integrating advanced machine learning algorithms and real-time data analytics, these AI systems could continually refine their feedback strategies, leading to even greater efficiency and efficacy in human-AI collaboration across various domains and tasks. Such advancements hold the potential to significantly augment human capabilities and pave the way for more seamless and productive CPHS partnerships in the future.
Footnotes
Acknowledgments
This work was supported by the NSF awards IS-1927462. Any opinions, findings, conclusions, or recommendations expressed in this paper are those of the authors and do not necessarily reflect the views of the NSF.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.