
Abstract
Robots are the next wave in service technology; however, this advanced technology is not perfect. This research examines how social perceptions regarding the warmth and competence of service robots influence consumer reactions to service failures and recovery efforts by robots. We argue that humanoid (vs. nonhumanoid) service robots are more strongly associated with warmth (whereas competence does not differ). This tendency to expect greater warmth from humanoid robots has important consequences for service firms: (i) consumers are more dissatisfied due to lack of warmth following a process failure caused by a humanoid (vs. nonhumanoid; Study 1); (ii) humanoids (but not nonhumanoids) can recover a service failure by themselves via sincere apology, restoring perceptions of warmth (Study 2A); (iii) humanoids (but not nonhumanoids) can also effectively provide explanations as a recovery tactic (Study 2B); and, importantly, (iv) human intervention can be used to mitigate dissatisfaction following inadequate recovery by a nonhumanoid robot (Study 3), supporting the notion of human-robot collaboration. Taken together, this research offers theoretical implications for robot anthropomorphism and practical implications for firms employing service robots.
Churi, a virtual assistant robot at the Henn-Na Hotel in Japan, was “fired” (Gale and Mochizuki 2019). The hotel made the decision after complaints from guests who were annoyed by the robot’s malfunctions. The robot interpreted snoring as a request for help and woke guests up repeatedly during the night. Churi also interrupted guests’ conversations and messed up room service orders. The robot concierge at the front desk couldn’t handle basic requests.
In an era of increasing automation and robotization in the service sector, we are witnessing remarkable changes in service delivery processes. Service robots, which refer to “system-based autonomous and adaptable interfaces that interact, communicate and deliver service to an organization’s customers” (Wirtz et al. 2018, p. 4), are replacing human employees (Marinova et al. 2017). For example, CitizenM hotels replaced their front-desk associates with digital kiosks, and the service robot Pepper engages with customers by moving around the lobby and handling guest requests at Mandarin Oriental in Las Vegas. Despite the rapid infusion of technology in service encounters, research is scant on how consumers perceive service interactions with highly advanced technologies. Although service robots are not error free, our understanding of how people react to service failures made by service robots is limited (Honig and Oron-Gilad 2018). How do consumers perceive service failures caused by service robots? And what is the most effective way to recover from such service failures? To address these questions, the present research examines consumers’ perceptions of service failures caused by service robots and accompanying service recovery efforts.
Doing so makes several contributions to the literature. First, we address an important theoretical gap in the literature on service failure and recovery by increasing our understanding of technology-infused service encounters (Larivière et al. 2017; Rafaeli et al. 2017). Specifically, our work demonstrates that consumer responses to service robots depend upon the degree of robot anthropomorphization, coupled with the type of service failure and recovery. Second, we build on the literature on anthropomorphism by uncovering the role of warmth and competence that underlie customer satisfaction following a service failure and recovery by robots (Broadbent 2017; Epley, Waytz, and Cacioppo 2007). Interestingly, we find that warmth perceptions are particularly salient in driving postfailure satisfaction and in determining the effectiveness of recovery efforts by both service robots and humans. Finally, we provide substantive insight into how service firms can enhance customer satisfaction through the robot and human collaboration in service encounters (Larivière et al. 2017; Rafaeli et al. 2017; Van Vaerenbergh et al. 2019).
Theoretical Background
Service Robots
Today’s service robots are designed to interact, communicate, and deliver services to customers based on artificial intelligence (AI). Particularly, intuitive and empathetic intelligence reflects the robot’s experiential, emotional, and social capabilities to enhance consumers’ service experiences (Huang and Rust 2018). These “highest” levels of intelligence enable machines to deliver socially and emotionally interactive services, such as chatbots communicating with customers and frontline services delivered by robots (Rafaeli et al. 2017). Moreover, these levels of intelligence distinguish service robots from self-service technologies that reflect mechanical and analytical intelligence and generally lack the capacity to socially engage with consumers (e.g., Meuter et al. 2005; Wirtz et al. 2018).
The service robot acceptance model (Wirtz et al. 2018) suggests that consumers’ acceptance of robots may be determined not only by functionality (e.g., perceived usefulness and ease of use) but also by social-emotional and relational elements. Prior research points to the importance of the latter in several ways. First, the perceived humanness of service robots through their appearance can influence consumers’ attitudes and willingness to interact (e.g., Broadbent 2017; Kim, Schmitt, and Thalmann 2019; Lu, Cai, and Gursoy 2019; Paauwe et al. 2015). People tend to prefer a robot with a realistic humanlike face although not to a point where it looks almost the same as a real human (Mori 1970; Mori, MacDorman, and Kageki 2012). For example, consumers can experience discomfort and threat to human identity when they interact with highly humanlike service robots (Mende et al. 2019). Second, when service robots are capable of social skills, such as displaying socially appropriate actions (e.g., saying hello) and emotions (e.g., smiling in a positive situation), consumers are more willing to interact with, and therefore, accept them (Breazeal 2003). Indeed, in human-robot interactions, people can feel as if they are dealing with another social being (i.e., automated social presence; van Doorn et al. 2017), which enhances perceived enjoyment and use of such technologies (e.g., Heerink et al. 2008).
Given the evidence that human-robot service interactions may, to some extent, reflect interpersonal interactions (Mirnig et al. 2017; van Doorn et al. 2017), we now draw upon research on anthropomorphism and social perception theories to better understand consumers’ responses to service failures and recovery efforts by service robots.
Robot Anthropomorphism
Anthropomorphism is defined as the attribution of human characteristics, motivations, intentions, and emotions to nonhuman agents (Epley, Waytz, and Cacioppo 2007). Simply put, anthropomorphism is to see nonhumans as humans. Previous consumer behavior research has shown the impact of anthropomorphism on consumer judgments and behaviors in various nonhuman contexts, such as products (e.g., cars and lightbulbs; Hur, Koo, and Hofmann 2015; Maeng and Aggarwal 2017; Wen Wan, Peng Chen, and Jin 2017), brands (Aggarwal and McGill 2007; Chen, Wan, and Levy 2017; Puzakova, Kwak, and Rocereto 2013), time (May and Monga 2013), and money (Zhou, Kim, and Wang 2019). This stream of research suggests that consumers’ reactions to anthropomorphized brands or products are determined by social psychological factors. For instance, social exclusion enhances preference for anthropomorphized brands (Chen, Wan, and Levy 2017), while social crowdedness diminishes such a tendency (Puzakova and Kwak 2017). To extend this large body of literature, the present research examines service robot anthropomorphism and its impact on consumer responses to service failures and recovery efforts by service robots.
Do people indeed anthropomorphize robots? Previous robotics research shows that a physical embodiment of robots enables users to anthropomorphize robots (Broadbent 2017). Robots with a greater number of humanlike facial features, such as eyes and a mouth, are perceived to be more humanlike than those with fewer facial features (Broadbent 2017). The enhanced anthropomorphism of robots increases their realism and capability, thereby boosting involvement and use (Paauwe et al. 2015). Furthermore, users apply social stereotypes (e.g., gender stereotype; Kuchenbrandt et al. 2014) or social categorization (e.g., in-group vs. out-group; Eyssel and Kuchenbrandt 2012) to anthropomorphized robots. Given this evidence of anthropomorphization of robots, we now turn to social perception theories that can explain how consumers perceive and react to humanoids and nonhumanoids.
Social Perceptions of Service Robots
Humans have minds capable of thinking (i.e., agency) and feeling (i.e., experience; H. M. Gray, Gray, and Wegner 2007). People attribute minds to infer other people’s personality, ability, and intent (Broadbent et al. 2013; Singer 1994). A stream of social psychology research has examined the notion of mind perceptions in various nonhuman contexts, such as animals, God, and, most importantly, machines (H. M. Gray, Gray, and Wegner 2007; K. Gray and Wegner 2010, 2012; Waytz et al. 2010). For example, K. Gray and Wegner (2012) show that people believe that experience, not agency, is fundamentally lacking in machines. Furthermore, prior research suggests that mind perceptions of machines are closely related to anthropomorphism (Epley, Waytz, and Cacioppo 2007), such that humanlike features (e.g., a face, arms, and a voice) lead people to attribute minds to machines and humanize them (Bigman and Gray 2018; Broadbent et al. 2013; Schroeder and Epley 2016).
The two dimensions of mind perception are closely associated with other important constructs in social cognition, most notably warmth and competence perceptions (Fiske, Cuddy, and Glick 2007; H. M. Gray, Gray, and Wegner 2007). Warmth and competence are two universal dimensions in individuals’ perceptions of people, brands, and companies (Aaker, Vohs, and Mogilner 2010; Fiske, Cuddy, and Glick 2007; Judd et al. 2005). Warmth perceptions capture perceived trustworthiness, friendliness, and helpfulness, while competence perceptions reflect perceived capability, intelligence, and skillfulness (Cuddy, Fiske, and Glick 2008). Accordingly, experience and agency perceptions map well on to warmth and competence dimensions of social cognition (K. Gray and Wegner 2010; Waytz et al. 2010). Therefore, as anthropomorphism induces people to perceive nonhuman entities like humans (Epley, Waytz, and Cacioppo 2007), the universal dimensions of social cognition—warmth and competence—offer a theoretical framework for examining the role of service robot anthropomorphism in consumer responses to service failures and recovery efforts.
A large body of research has demonstrated the significant role of social cognition in interpersonal service interactions (e.g., Li, Chan, and Kim 2018). For example, heavier female service providers are perceived to be warmer, thus enhancing service satisfaction (N. A. Smith, Martinez, and Sabat 2016). Likewise, the use of emoticons increases perceived warmth while decreasing perceived competence of service employees, contingent upon relationship norms (Li, Chan, and Kim 2018). Interestingly, van Doorn et al. (2017) propose that warmth and competence perceptions can underlie how consumers react to technology infusion in service encounters. According to these authors, consumers can perceive (i) more warmth in technological service agents with higher levels of automated social presence (e.g., frontline service robots) because they are perceived to be more sociable, interactive, and trustworthy compared to machines with lower levels of automated social presence (e.g., self-service technologies) and (ii) more competence in technological service agents with high levels of automated social presence as they are perceived as having a life and to be intelligent. Likewise, the service robot acceptance model suggests that social-emotional and relational elements can drive warmth perceptions, while functional elements can shape consumers’ competence perceptions (Wirtz et al. 2018).
In sum, previous research suggests that how people react to interactions with service robots is determined not only by their functional ability (i.e., whether service robots successfully deliver what consumers want) but also by their social capability (i.e., whether service robots appropriately interact with consumers; Huang and Rust 2018; Tung, Sun, and Au 2018; Wirtz et al. 2018). That is, people can see robots as humans, and when they do, the fundamental dimensions of social perception—warmth and competence—should be relevant to understand consumers’ expectations for, and responses to, service failures and recovery efforts by robots.
Pilot study
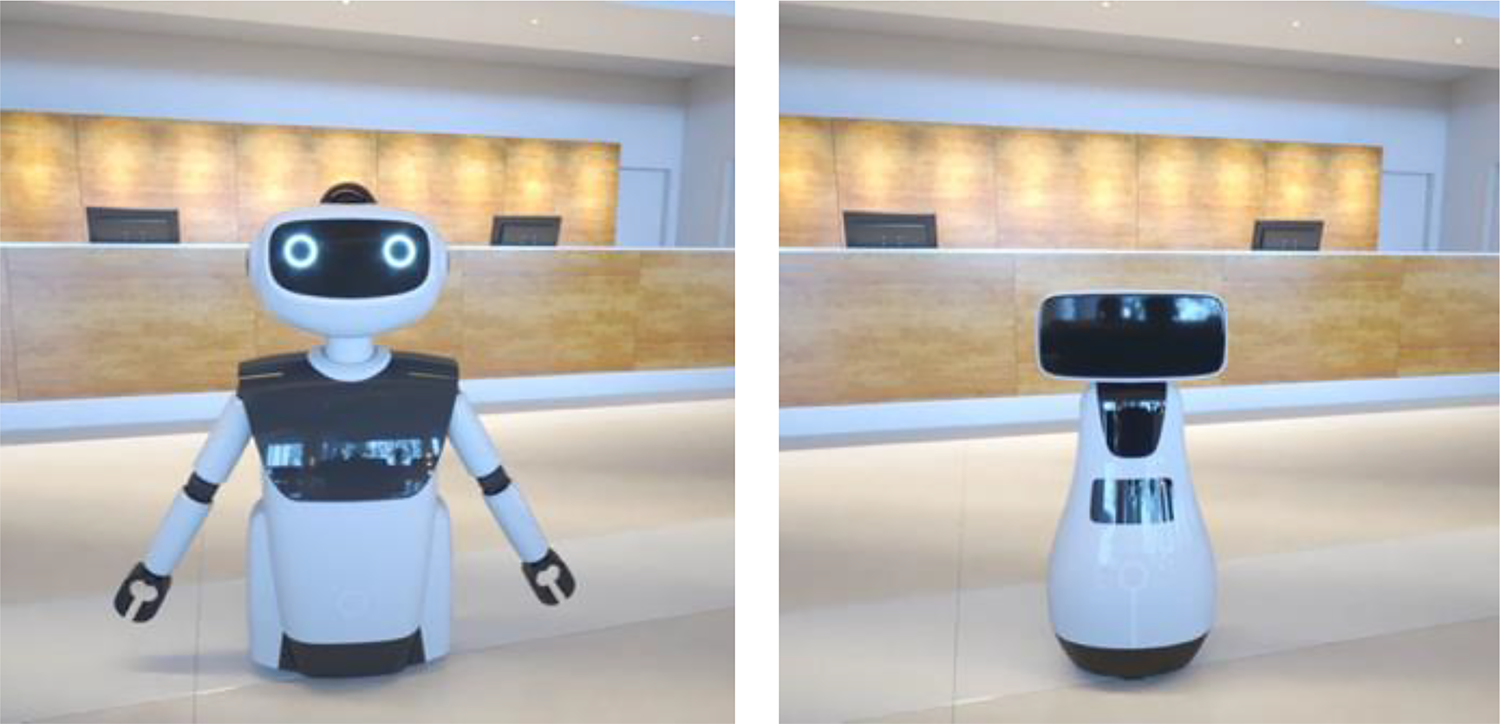
To explore consumers’ social perceptions of service robots, we conducted a pilot study using open-ended content analysis and close-ended measures of warmth and competence. Participations (n = 96, M age = 33.63, female = 54), recruited from Amazon MTurk, were randomly assigned to one of two conditions (service robot type: humanoid vs. nonhumanoid). Participants first read a brief description of service robots and their use in hotels and restaurants and were presented with images of a service robot (humanoid or nonhumanoid; see Figure 1). We then measured perceived warmth (caring, friendly, kind, warm, and sociable; α = .90) and competence (intelligent, energetic, organized, and motivated; α = .83; Judd et al. 2005; Zhou, Kim, and Wang 2019). As a manipulation check, participants indicated the extent to which the service robot seemed like a person or a machine (1 = very machine-like, more like an object, 7 = very human-like, more like a person, r = .86, p < .01). As expected, participants viewed the humanoid more like a human than the nonhumanoid, M Humanoid = 3.85 versus M Nonhumanoid = 2.47, F(1, 94) = 14.06, p < .01. Regarding social perceptions: Warmth perceptions were higher for the humanoid versus nonhumanoid, M Humanoid = 4.54 versus M Nonhumanoid = 3.36, F(1, 94) = 15.54, p < .01, and competence perceptions did not differ, M Humanoid = 5.01 versus M Nonhumanoid = 4.82, F(1, 94) < 1. A content analysis of open-ended responses supports these perceptions (details omitted for brevity; see Online Appendix Section 6). That is, people perceived greater warmth, but not greater competence, with humanoid (vs. nonhumanoid) robots.
Organizing framework.
Overall, the pilot study reveals that people anthropomorphize humanoids more than nonhumanoids, and consequently, perceive humanoids as warmer than nonhumanoids (see also Kim, Schmitt, and Thaimann 2019). However, unlike Zhou, Kim, and Wang (2019), the increased anthropomorphism associated with humanoids did not enhance perceived competence. As Huang and Rust (2018) suggest, once robots reach a certain intelligence level, people may assume they have a similar level of capability and smartness. That is, people may perceive both humanoids and nonhumanoids as having reached a high level of mechanic and analytic intelligence (driving competence perceptions) but expect humanoids to have greater empathetic intelligence and social ability (driving warmth perceptions). Given that consumers associate greater warmth with humanoid (vs. nonhumanoid) service robots, how will this affect their postfailure satisfaction? We propose that the effect of service robot type on satisfaction following a service failure depends upon failure type.
The Moderating Role of Service Failure Type
The marketing literature distinguishes between two types of service failures (Bitner, Boom, and Tetreault 1990; Hoffman, Kelley, and Rotalsky 1995; A. K. Smith, Bolton, and Wagner 1999). An outcome failure occurs when a service firm “does not fulfill the basic service need or perform the core service (e.g., a reserved hotel room is unavailable because of overbooking),” while a process failure occurs when “the service delivery is flawed or deficient in some way (e.g., a hotel front-desk agent treats the customer rudely during the check-in)” (A. K. Smith, Bolton, and Wagner 1999, p. 358). As a service provider’s ability to deliver the promised service accurately is one of the key factors leading to competence perceptions (Parasuraman, Zeithaml, and Berry 1985; Surprenant and Solomon 1987), outcome service failures can be construed as competence-related failures (Li, Chan, and Kim 2018; A. K. Smith, Bolton, and Wagner 1999). In contrast, a process failure involves interpersonal quality and social/psychological factors, thus resulting in a loss of social resources (e.g., status, esteem; Chan, Wan, and Sin 2007; DeWitt and Brady 2003; A. K. Smith, Bolton, and Wagner 1999). To that end, process service failures are similar to warmth-related failures (Li, Chan, and Kim 2018; A. K. Smith, Bolton, and Wagner 1999). In sum, the service provider’s competence is more prominent in an outcome failure whereas warmth is more prominent in a process failure.
As the pilot study attests, consumers perceive humanoid (vs. nonhumanoid) service robots as having greater warmth and therefore a greater capacity to deliver warm and friendly service. Consequently, from an expectancy disconfirmation perspective (e.g., Tausch, Kenworthy, and Hewstone 2007), process failures such as inappropriate interactional behaviors (e.g., inattentiveness or rudeness) by humanoids can loom larger, failing to meet customer expectations and thus leading to lower levels of satisfaction. In contrast, for outcome failures, consumers may have similar levels of expectations towards humanoids and nonhumanoids because competence perceptions do not differ. As a result, non-/humanoid differences in satisfaction will be minimized for outcome service failures. Formally:
Hypothesis 1 predicts an interaction of non-/humanoid service robot and process/outcome failure on satisfaction that is mediated by warmth perceptions. From a theoretical perspective, Hypothesis 1 supports our theorizing regarding the role of social perceptions, in particular warmth, when service robots are anthropomorphized. From a substantive perspective, Hypothesis 1 suggests that service failures involving service process are particularly problematic for humanoid service robots.
Robot Recovery
Hypothesis 1 focuses on how service robot type affects consumer (dis)satisfaction following a service failure. In turn, this raises the question: Once a service failure occurs, can a robot recover?
Based on social exchange theory and mental accounting theory (Foa and Foa 2012; Thaler 1985), people expect and prefer to receive resources that match the type of loss (i.e., service failure type; A. K. Smith, Bolton, and Wagner 1999). Hence, in a process failure where consumers experience a social loss, they prefer to receive social resources signaling interactional justice (Blodgett, Hill, and Tax 1997). Previous research suggests that interactional justice can be separated into two dimensions, interpersonal and informational fairness (Colquitt 2001). These dimensions align with two commonly used service recovery tactics: an apology and an explanation.
Apology
We first focus on apology as a recovery tactic to increase interpersonal fairness (Blodgett, Hill, and Tax 1997; A. K. Smith, Bolton, and Wagner 1999). Will consumers accept a service robot’s apology and will their acceptance depend upon robot type? An effective apology requires empathy, or the ability to recognize and be concerned about the victim’s suffering (T. A. Brown et al. 2010; Davis 1983). Thus, high empathy in an apology can express warmth toward the victim and an understanding of the situation (Fehr, Gelfand, and Nag 2010; Schmitt et al. 2004) and should bolster interpersonal fairness perceptions (Colquitt et al. 2018; Patient and Skarlicki 2010). As previously argued, people perceive a sense of social connection with an anthropomorphized object and expect better social capabilities (e.g., Epley, Waytz, and Cacioppo 2007), especially when a robot has humanlike features that create meaningful social interactions (Duffy 2003; Wirtz et al. 2018). Thus, a strong apology with empathy may be perceived as more sincere and convincing when delivered by a humanoid having social skills, thereby increasing warmth perceptions. Conversely, people may not believe that a nonhumanoid has any social or emotional capability; hence, an apology, regardless of any attempt to express empathy, may not seem sincere (Broadbent et al. 2013; Huang and Rust 2018).
Explanation
We next focus on explanation as a recovery tactic to increase informational fairness (Colquitt 2001). Will consumers accept a service robot’s explanation and will their acceptance also depend upon robot type? An explanation is an act of revealing the reason or the cause of a service failure, and consequently, explanations are linked to informational fairness perceptions (Liao 2007; Mattila 2006). Informational fairness can be enhanced not only when information is perceived to be reasonable, timely, and specific but also when the explainer is perceived to be honest and truthful (Bradley and Sparks 2012; Colquitt 2001; Folger and Cropanzano 1998; D. L. Shapiro, Buttner, and Barry 1994). That is, the effectiveness of an explanation is driven by interpersonal and social skills (i.e., empathetic intelligence) as well as by perceived adequacy and truthfulness of information (i.e., analytical and thinking intelligence; Bradley and Sparks 2012; Colquitt 2001; Huang and Rust 2018, 2020). Accordingly, we predict that a positive effect of explanation should emerge for a humanoid because people believe a humanoid has adequate levels of both social and analytical skills; such effect should not emerge for a nonhumanoid lacking social capabilities.
The above line of reasoning thus predicts that apology and explanation will be more effective when delivered by a humanoid (vs. nonhumanoid). Furthermore, both recovery tactics are expected to enhance warmth perceptions: Apology does so via interpersonal fairness, whereas explanation does so via informational fairness. Within the context of process failures, consumers should be particularly keen on service recovery tactics signaling warmth (to restore social loss; Blodgett, Hill, and Tax 1997; Mattila 2006; A. K. Smith, Bolton, and Wagner 1999), and therefore, we predict that postrecovery satisfaction will be mediated by warmth not competence. Formally:
Together, Hypotheses 2 and 3 predict interactions of non-/humanoid service robot with service recovery tactic (apology, explanation) that is mediated by warmth perceptions. From a theoretical perspective, Hypotheses 2 and 3 further support our theorizing regarding the role of social perceptions, in particular warmth, when service robots are anthropomorphized. From a substantive perspective, Hypotheses 2 and 3 suggest that apology and explanation are effective as recovery tactics when delivered by humanoids.
Human Intervention in Robot Recovery
Given that effective recovery is difficult for a nonhumanoid robot, a natural question arises: Should human employees intervene to assist in service recovery?
Previous research suggests that consumers experiencing a technology failure tend to expect high-touch recovery by a human service provider (S. W. Brown 1997; De Keyser, Schepers, and Konus 2015). In service settings, consumers typically interact with friendly and helpful (i.e., warm) employees (Parasuraman, Zeithaml, and Berry 1985). In the case of a service failure caused by a humanoid, a human employee’s additional social resource provision may not be necessary. The humanoid robot’s apology is already sufficient to deliver warmth, thus enabling service recovery. Conversely, nonhumanoid robots do not have the capacity to convey empathy and sincerity through their apology. Therefore, the nonhumanoids may require a human service provider’s engagement in the service recovery to help add a social resource by communicating interpersonal attention in their apology (Mattila, Cho, and Ro 2011; T. Shapiro and Nieman-Gonder 2006). We therefore predict a two-way interaction of human-assisted apology and service robot type such that a human service provider’s apology will enhance satisfaction to a greater extent following a nonhumanoid (vs. humanoid) apology (because the humanoid’s apology is already effective). Formally,
Theoretically, Hypothesis 4 again supports the role of warmth when service robots are anthropomorphized and, substantively, suggests that an apology is more effective for humanoids, but nonhumanoids need human assistance for service recovery.
Empirical Overview
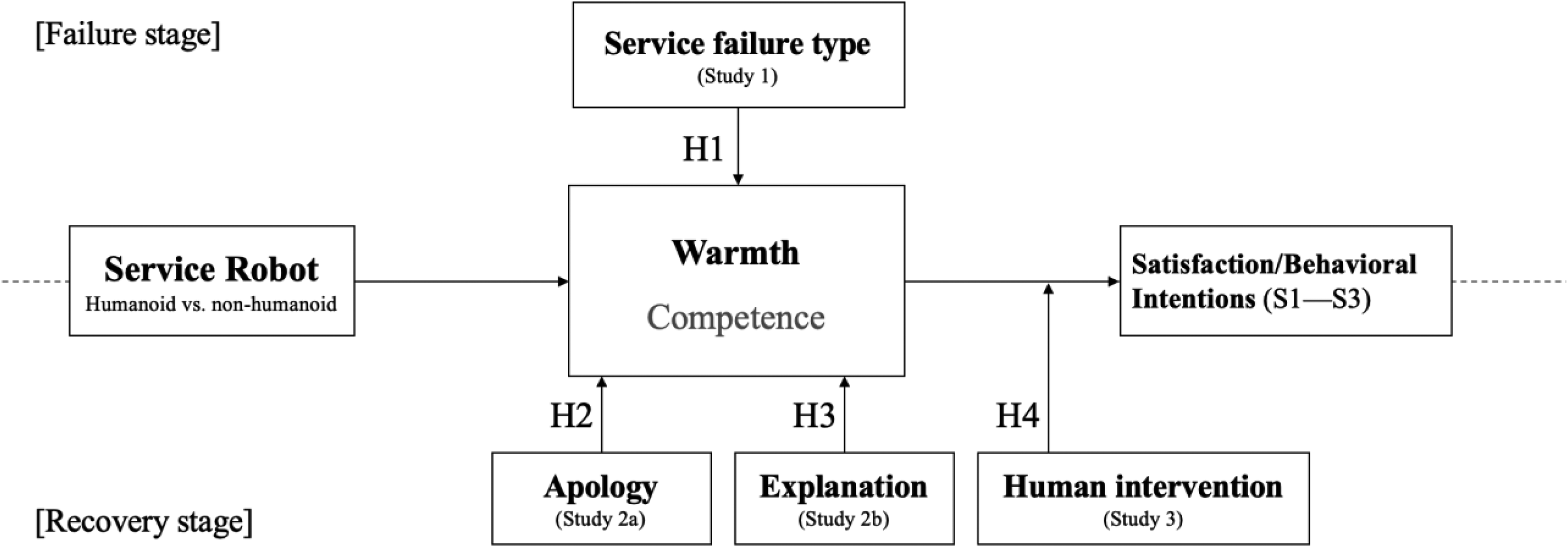
This research proposes that non-/humanoid service robot types, due to anthropomorphism via their humanlike features, drive distinct inferences about the service robot’s warmth and competence, which in turn influence consumer responses to service failures and recovery. Figure 2 provides an organizing framework that captures our theorizing and empirical work. Specifically, Study 1 examines how service robot anthropomorphism affects consumer perceptions of warmth and competence, and in turn satisfaction, following process versus outcome service failures (testing Hypothesis 1). Studies 2 and 3 examine the impact of anthropomorphism on consumer reactions to recovery tactics following a service process failure. Specifically, Study 2A examines the impact of a robot’s apology (testing Hypothesis 2), and Study 2B tests the impact of a robot’s explanation (testing Hypothesis 3). Finally, Study 3 investigates whether and how human intervention can enhance recovery by robots (testing Hypothesis 4). Prior to the main studies, the service robot stimuli and the service failure scenarios were verified in separate pretests (see Online Appendix Sections 3–4 for details).

Humanoid (left) and nonhumanoid (right) in pilot test, Studies1 and 3. Note. The images were also verified in a pretest, reported in the Online Appendix Section 3. We also incorporated a manipulation check in the pilot.
Study 1: When Robots Fail
Study 1 investigates how consumers respond to service robots’ failures, as a function of robot anthropomorphism and service failure type, in a restaurant service context. Following Hypothesis 1, we predict that consumers will be less satisfied when a process failure is caused by a humanoid than by a nonhumanoid robot due to lower warmth perceptions; such differences are not expected to emerge for an outcome failure.
Participants and Procedure
The study design was a 2 (service robot type: humanoid vs. nonhumanoid) × 2 (failure type: process vs. outcome) between-subjects design. A total of 205 1 U.S. adult consumers (M age = 34.27, female = 72), recruited from Amazon MTurk’s consumer panel, were randomly assigned to one of the four experimental conditions.
Participants viewed an image of a service robot manipulated to be either a humanoid or a nonhumanoid and were asked to imagine themselves in a restaurant scenario where either a process failure (inattentive service) or an outcome failure (incorrect order) occurred (adopted from A. K. Smith, Bolton, and Wagner 1999). Participants were then asked to indicate their satisfaction with the service experience (bad/good, unfavorable/favorable, negative/positive; Li, Chan, and Kim 2018), followed by warmth and competence perceptions 2 (same as Pilot study; Judd et al. 2005; see Appendix Table A1). Participants also responded to background questions, including frequency of dining out (used as a control variable in subsequent analyses).
Results
Satisfaction
A 2 × 2 ANCOVA on service satisfaction revealed a significant interaction between robot type and failure type, F(1, 200) = 4.33, p < .05; see Figure 3; the main effects were insignificant (Fs < 1). Participants were less satisfied with the humanoid robot than the nonhumanoid following a process failure, M Humanoid = 2.46 versus M Nonhumanoid = 3.05; F(1, 200) = 3.31, p = .07, but not following an outcome failure, M Humanoid = 2.85 versus M Nonhumanoid = 2.48; F(1, 200) = 1.27, p > .26.
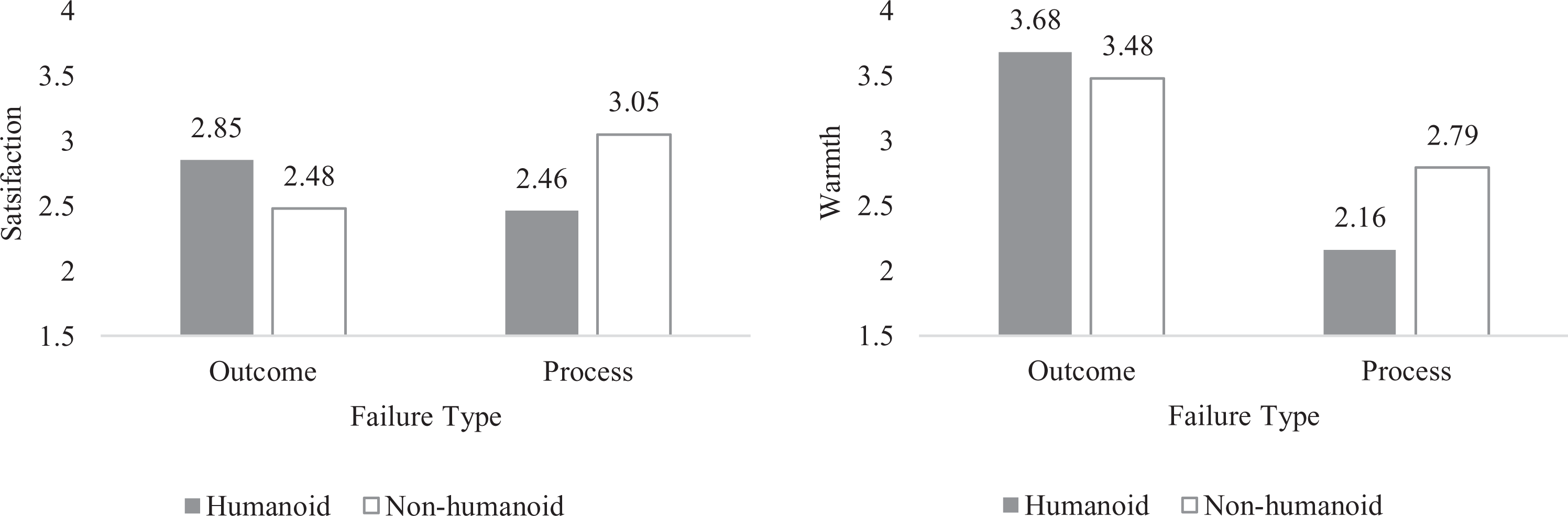
Satisfaction and warmth perceptions for process and outcome service failures by non-/humanoids (Study 1).
Warmth and competence perceptions
A 2 × 2 ANCOVA on perceived warmth (see Figure 3) revealed a main effect of failure type, M Process = 2.48 versus M Outcome = 3.58, F(1, 200) = 23.80, p < .01, qualified by its interaction with robot type, F(1, 200) = 3.32, p = .07; the main effect of robot type was insignificant, F(1, 200) < 1. Participants perceived the humanoid as less warm than its nonhumanoid counterpart following a process failure, M Humanoid = 2.16 versus M Nonhumanoid = 2.79; F(1, 200) = 3.94, p < .05, while warmth perceptions did not differ following an outcome failure, M Humanoid = 3.68 versus M Nonhumanoid = 3.48; F(1, 200) < 1. A similar 2 × 2 ANCOVA on perceived competence revealed neither main effects nor an interaction effect (all ps > .10).
Mediation
A moderated mediation analysis was conducted using the bootstrapping approach (PROCESS Model 8, bootstrapping samples = 5,000; Hayes 2018), with robot type as the independent variable, failure type as the moderator, perceived warmth and competence as parallel mediators, and satisfaction as the dependent variable, controlling for frequency of dining out. The indirect effect of robot type via warmth on service satisfaction is supported for the process failure (
Discussion
Study 1 demonstrates that consumers are less satisfied with a humanoid (vs. a nonhumanoid) following a process failure; such differences do not emerge following an outcome failure. In addition, we show that warmth (but not competence) mediates the impact of robot and service failure type. Warmth perceptions were particularly low following a process failure by a humanoid (vs. nonhumanoid) robot. Given that process failures caused by a humanoid lead to lower levels of satisfaction due to the lack of perceived warmth, we now examine how service recovery can mitigate dissatisfaction with robot service failures.
Study 2: Can Robots Recover?
Study 2A
The objective of Study 2A is to examine how service robot anthropomorphism influences the impact of an apology as a service recovery tactic. Following Hypothesis 2, we predict that consumers will be more satisfied with a humanoid’s apology due to enhanced warmth perceptions; such differences are not expected to emerge for a nonhumanoid.
Participants and Procedures
The study design was a 2 (service robot type: humanoid vs. nonhumanoid) × 2 (apology vs. control) between-subjects design. A total of 205 3 U.S. adult consumers (M age = 36.37, female = 83), recruited from Amazon MTurk’s consumer panel, were randomly assigned to one of the four experimental conditions.
To strengthen realism, we utilized a 3D animation of a service encounter. The 3D animations were carefully designed and created by a professional graphic design company (KLIO Design located in South Korea). Using animations is akin to the use of videos to stimulate service encounters, for which there is precedent in the recent service literature (e.g., Delcourt et al. 2017; McColl-Kennedy, Daus, and Sparks 2003; Mende et al. 2019; Victorino et al. 2012). Participants watched a 3D animation describing a hotel check-in scenario with slow and inattentive service (i.e., process failure) delivered by a humanoid or nonhumanoid (see Figure 4 and Online Appendix Section 5 for more details). Following the service failure, participants received either an apology or no apology. Following Roschk and Kaiser (2013), in the apology condition, the robot stated: “I’m really sorry for holding you up and I want to apologize. I hope you will still enjoy the evening. Again, please pardon me for the trouble. Sorry.” In the control condition, the robot stated: “Hope you enjoy the evening.” Participants then indicated their satisfaction (same as Study 1) as well as perceived warmth (caring, helpful; 1 = not at all, 7 = very much) and competence (capable, competent; Bolton and Mattila 2015 4 ; see Appendix Table A1). Participants also responded to background questions, including frequency of hotel stays during the past 12 months (used as a control variable in subsequent analyses).
Humanoid (left) and nonhumanoid (right) for 3D animations in Studies 2A and 2B.
Results
Satisfaction
A 2 × 2 ANCOVA on service satisfaction revealed a significant interaction between robot type and apology, F(1, 200) = 4.61, p < .05; see Figure 5; the main effects were insignificant (ps > .10). Participants were more satisfied with the humanoid’s apology (vs. control) following a process failure, M Apology = 4.51 versus M Control = 3.58; F(1, 200) = 7.14, p < .01; however, there was no such a difference for the nonhumanoid, M Apology = 3.69 versus M Control = 3.83; F(1, 200) < 1.
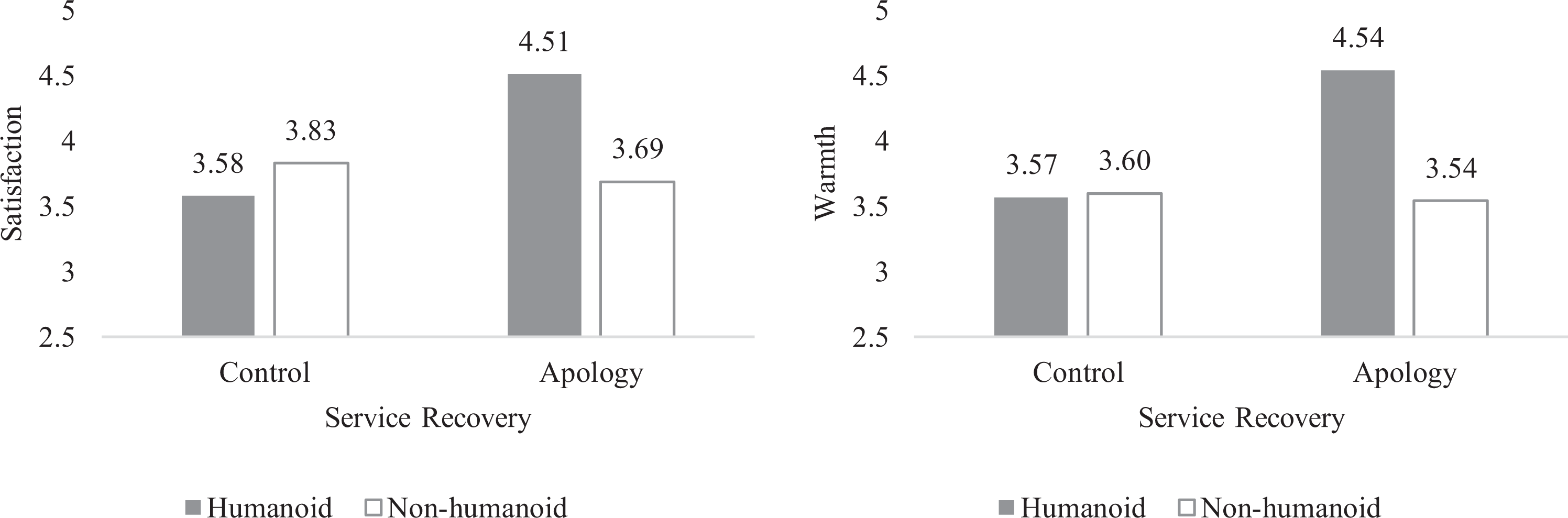
Satisfaction and warmth perceptions for apology (vs. control) by non-/humanoids (Study 2A).
Warmth and competence perceptions
A 2 × 2 ANCOVA on perceived warmth (see Figure 5) revealed a significant main effects of robot type, F(1, 200) = 4.18, p < .05, and apology, F(1, 200) = 3.75, p = .05, qualified by their interaction, F(1, 200) = 4.70, p < .05. For the humanoid, participants perceived greater warmth following the apology (vs. control), M Apology = 4.54 versus M Control = 3.57; F(1, 200) = 8.65, p < .01. Conversely, warmth perceptions did not differ by apology provision for the nonhumanoid, M Apology = 3.54 versus M Control = 3.60; F(1, 200) < 1. A similar 2 × 2 ANCOVA on perceived competence revealed a marginal main effect of robot type, F(1, 200) = 3.07, p = .08, while neither the main effect of apology nor the interaction were significant (ps > .10).
Mediation
A moderated mediation analysis (PROCESS Model 8, bootstrapping samples = 5,000; Hayes 2018) was conducted with apology as the independent variable, robot type as the moderator, perceived warmth and competence as parallel mediators, and satisfaction as the dependent variable, controlling for hotel visit frequency. The indirect effect of apology via warmth on satisfaction is significant for the humanoid (
To summarize, Study 2A provides support for our theorizing in Hypothesis 2: Following a process service failure, an apology enhances warmth perceptions and, in turn, satisfaction—when delivered by a humanoid, but not a nonhumanoid, service robot.
Study 2B
In Study 2B, we examine the effectiveness of an explanation as a service recovery tactic. Following Hypothesis 3, we expect that an explanation will be effective in boosting satisfaction (and consequential behavioral choice) for a humanoid, mediated by perceived warmth; such differences are not expected to emerge for a nonhumanoid.
Participants and Procedures
One-hundred and eighty-nine 5 U.S. adult consumers (M age = 36.02, female = 95), recruited from Amazon MTurk’s consumer panel, were randomly assigned to one of the four experimental conditions: 2 (service robot type: humanoid vs. nonhumanoid) by 2 (explanation: present vs. control) between-subjects design.
As in Study 2A, participants watched a 3D animation describing a restaurant scenario with slow and inattentive service (i.e., process failure) delivered by a humanoid or nonhumanoid. Following Bradley and Sparks (2012), the robot in the explanation condition stated: “Our electricity was shut off for a couple of hours this afternoon. The entire area was out of power.” In the control condition, the robot did not offer any explanation. Participants indicated their satisfaction (same as Study 1), willingness to revisit the restaurant (0 = no, 1 = yes), as well as perceived warmth and competence (same as Study 2A 6 ). The last part of the questionnaire involved background questions, including frequency of dining out (used as a control variable in subsequent analyses).
Results
Satisfaction
A 2 × 2 ANCOVA on satisfaction (see Figure 6) revealed a main effect of explanation, F(1, 184) = 7.47, p < .01, and its interaction with robot type, F(1, 184) = 6.01, p < .05; the main effect of robot type was insignificant (Fs < 1). As expected, providing an explanation increased participants’ satisfaction for the humanoid, M Explanation = 5.04 versus M Control = 3.59; F(1, 184) = 12.32, p < .01, but not for the nonhumanoid, M Explanation = 4.46 versus M Control = 4.38; F(1, 184) < 1.
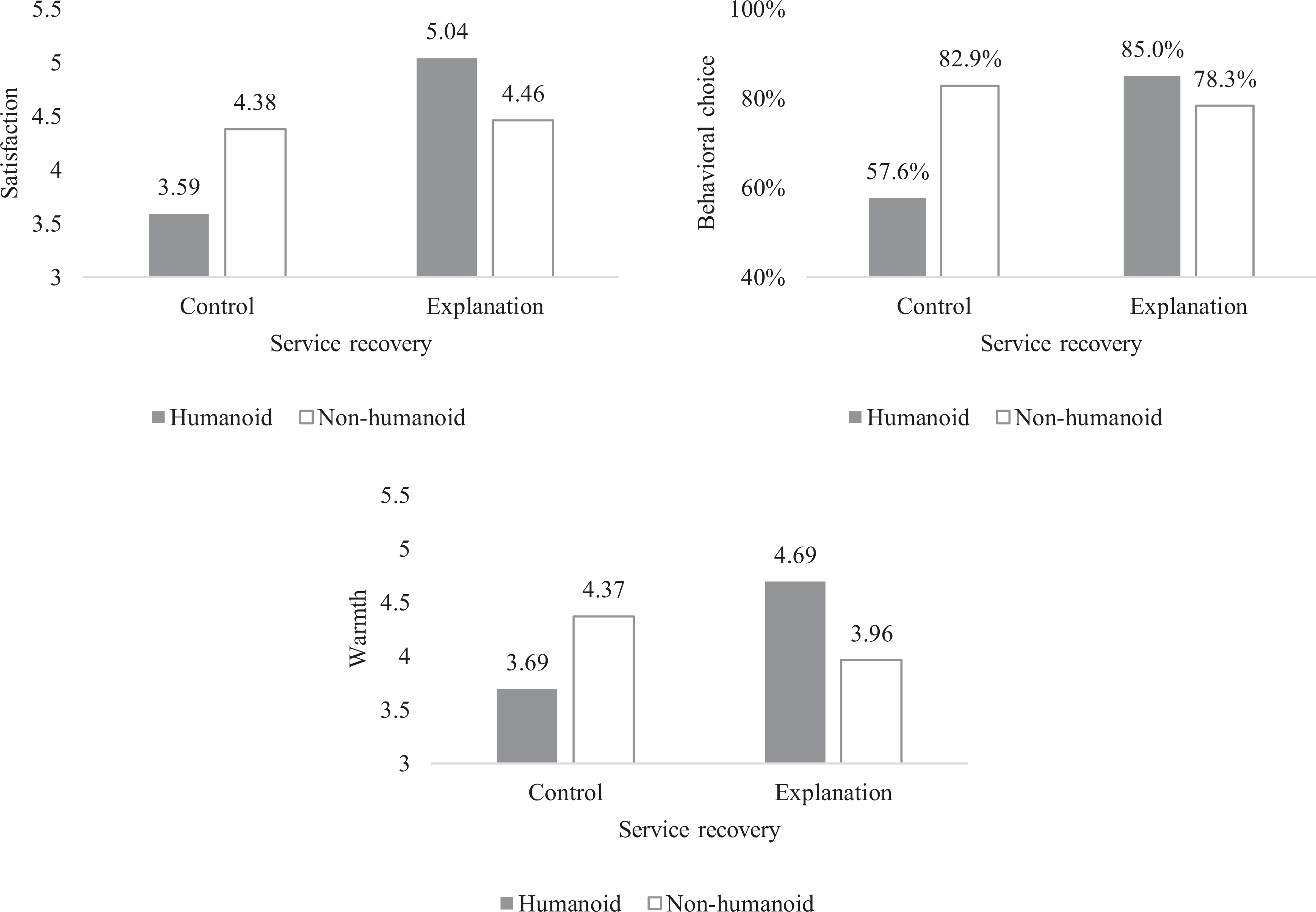
Satisfaction, behavioral choice and warmth perceptions for explanation (vs. control) by non-/humanoids (Study 2B).
Behavioral choice
A binary logistic regression on behavioral choice (revisit intention, coded 0 = no, 1 = yes) controlling for dining out frequency revealed a significant interaction between robot type and explanation (Wald χ2 = 6.21, p < .05; see Figure 6). As expected, participants who received an explanation from the humanoid were more likely to choose to revisit the restaurant than those who did not receive the explanation (M Explanation = 85.0% vs. M Control = 57.6%; Wald χ2 = 7.19, p < .01). However, such a difference did not occur for the nonhumanoid (M Explanation = 78.3% vs. M Control = 82.8%; Wald χ2 < 1).
Warmth and competence perceptions
A 2 × 2 ANCOVA on perceived warmth (see Figure 6) revealed a significant interaction between robot type and explanation, F(1, 184) = 6.74, p = .01; the main effects of robot type and explanation were insignificant (ps > .10). As expected, providing an explanation increased warmth perceptions for the humanoid, M Explanation = 4.69 versus M Control = 3.69; F(1, 184) = 6.20, p < .05, not for the nonhumanoid, M Explanation = 3.96 versus M Control = 4.37; F(1, 184) = 1.28, p > .25. A similar 2 × 2 ANCOVA on perceived competence revealed a significant interaction between robot type and explanation, F(1, 184) = 6.18, p < .05; the main effects of robot type and explanation were insignificant (Fs < 1). Again, providing an explanation marginally increased competence perceptions for the humanoid, M Explanation = 4.69 versus M Control = 4.07; F(1, 184) = 2.84, p < .10. Conversely, providing an explanation marginally decreased competence perceptions for the nonhumanoid, M Explanation = 4.19 versus M Control = 4.81; F(1, 184) = 3.43, p < .07.
Mediation
To assess mediation, we examined a moderated mediation analysis (PROCESS Model 8, bootstrapping samples = 5,000; Hayes 2018) with explanation as the independent variable, robot type as the moderator, perceived warmth and competence as parallel mediators, and behavioral choice as the dependent variable, controlling for dining out frequency. For warmth as mediator, the indirect effect was supported for the humanoid (
To summarize, Study 2B provides support for our theorizing in Hypothesis 3: Following a process service failure, an explanation enhances consumers’ satisfaction and revisit intentions with a humanoid (vs. nonhumanoid) service robot, with mediation via warmth perceptions.
Discussion
Together, Studies 2A and 2B shed light on the effectiveness of apology and explanation as recovery tactics following a process service failure. Studies 2A and 2B demonstrate that humanoids (but not nonhumanoids) can effectively apologize and explain the cause of the failure to enhance satisfaction. For both recovery tactics, restoration of warmth perceptions is the underlying mechanism. Given that nonhumanoids cannot effectively recover via apology or explanation, we now examine human-robot collaboration to assess whether a human service provider’s intervention can aid robot recovery.
Study 3: Can Humans Intervene?
The objective of Study 3 is to examine how robot recovery is affected by human intervention. Following Hypothesis 4, we predict that consumers will be more satisfied with service recovery when an apology is given by a human employee (vs. a nonhumanoid only); the positive effect of human assistance will be attenuated for a humanoid (because the humanoid’s own apology is already effective, as was predicted in Hypothesis 2 and observed in Study 2A).
Participants and Procedure
The study was a 2 (service robot type: humanoid vs. nonhumanoid) × 2 (human intervention: apology vs. control) between-subjects design. A total of 212 8 participants (M age = 44.51, female = 109) were recruited from Qualtrics and randomly assigned to one of the four experimental conditions.
Participants read a hotel check-in service scenario, focusing on a service process failure (i.e., slow and inattentive services) accompanied by an apology, and manipulating whether the robot was non-/humanoid. In the human intervention condition, a human employee who witnessed the situation sincerely apologizes for the incident, saying “I saw what just happened with our service robot and I want to apologize for the inconvenience. We’re so sorry. Hope you enjoy your stay with us.” In the control condition, a human employee welcomes the customer (to control for presence of a human employee while manipulating apology). Afterward, participants indicated their satisfaction (e.g., “In my opinion, the hotel provided a satisfactory resolution to my problem on this particular occasion,” Maxham and Netemeyer 2003; see Appendix Table A1). Participants also provided background information, including their hotel visit frequency (used as a control variable in subsequent analyses).
Results
Satisfaction
A 2 × 2 ANCOVA on service recovery satisfaction (see Figure 7) revealed a main effect of human intervention, F(1, 207) = 12.32, p < .01, qualified by its interaction with robot type, F(1, 207) = 4.82, p < .05; the main effect of robot type was insignificant, F(1, 207) < 1. Specifically, the human employee’s intervention enhanced satisfaction in the nonhumanoid condition, M HI_apology = 4.61 versus M HI_control = 3.42; F(1, 207) = 15.86, p < .01, but had no effect in the humanoid condition, M HI_apology = 4.27 versus M HI_control = 4.00; F(1, 207) < 1. These results support Hypothesis 4.
Looked at another way, in the absence of human intervention, participants were more satisfied in the humanoid (vs. nonhumanoid) condition, M Humanoid = 4.00 versus M Nonhumanoid = 3.42; F(1, 207) = 3.77, p < .06, consistent with Hypothesis 2. In the presence of human intervention, this difference in satisfaction due to robot type was attenuated, M Humanoid = 4.27 versus M Nonhumanoid = 4.61; F(1, 207) = 1.36, p > .24.

Satisfaction following non-/humanoids recovery and human intervention (Study 3).
Taken together, these findings indicate that a human intervention enhances satisfaction following service failure and recovery caused by a nonhumanoid. Conversely, a humanoid robot is able to recover effectively without human intervention (bolstering the findings of Study 2A).
Meta-Analysis: Robustness of the Findings
We conducted a single paper meta-analysis (McShane and Böckenholt 2017) to test the robustness of our main baseline arguments (that consumers react more negatively toward a process service failure when it is made by a humanoid versus a nonhumanoid). The non-/humanoid difference in satisfaction following a process failure in Study 1 was replicated in the no-recovery (control) conditions of Studies 2A and 2b. The single paper meta-analysis for this non-/humanoid difference is supportive (estimate = .53, SE = .22; z = 2.36, p < .01). In addition, the non-/humanoid apology difference in Study 2A is replicated in the no-human-intervention condition of Study 3 and also receives support in the single paper meta-analysis (estimate = .71, SE = .22; z = 3.27, p < .01).
General Discussion
Robots are the next wave in service technology. In the service industry, service robots are increasingly common (Marinova et al. 2017), and consumers expect that robots can offer service improvements due to their innovativeness and reliability (Huang and Rust 2018). Nevertheless, this advanced technology can also make mistakes (see Honig and Oron-Gilad, 2018, for a review). Despite the increasing role of robots in frontline service encounters (Marinova et al. 2017; Rafaeli et al. 2017), little is known about how service failures and recovery attempts made by a service robot affect consumer responses. Service encounters comprise not only functional, outcome-related aspects but also interactional, process-related aspects (Grönroos 1988; Parasuraman, Zeithaml, and Berry 1985; Price and Arnould 1999). Therefore, it is critical to shed light on what consumers expect from service robots and how such expectations play a role in consumers’ perceptions of service failures and recovery efforts.
To that end, the current research investigated how social perceptions, in terms of warmth and competence, influence consumer reactions to service failures and recovery efforts by robots. As the pilot study suggests, consumers tend to anthropomorphize service robots and, as a result, humanoids (vs. nonhumanoids) are more strongly associated with warmth (whereas competence does not differ). This tendency to expect greater warmth with humanoids has important consequences for service delivery, in particular in the context of service failures. As Study 1 demonstrates, consumers are more dissatisfied due to lack of warmth following a process failure caused by a humanoid (vs. nonhumanoid). While a drawback in the context of process failures, warmth associated with humanoids can be beneficial during the service recovery process. Indeed, Studies 2A and 3 show that humanoids can recover from a service failure via apology and explanation, restoring perceptions of warmth and, in turn, satisfaction. In contrast, consumers are not receptive to an apology or an explanation by nonhumanoids because their lack of warmth inhibits expressions of empathy. Finally, Study 3 demonstrates that human-robot collaboration can be effective: a human intervention can be used to effectively recover following a nonhumanoid service failure.
Theoretical Contributions
With this research, we address an important theoretical gap in the literature on service failures and service recovery (e.g., Van Vaerenbergh et al. 2014, 2019), particularly regarding technology-infused service encounters (Larivière et al. 2017; Rafaeli et al. 2017). Services marketing scholars have called for a deeper understanding of how consumers perceive service delivery carried by service technologies and how to improve consumers’ overall service experiences. To answer this call, we investigated consumer reactions to service failures and recovery efforts by robots. Previous scholarly research on technology-infused service encounters has mainly focused on service failures in self-service contexts (e.g., Collier, Breazeal, and White 2017; Forbes 2008), consumers’ acceptance of service robots (e.g., Keating, McColl-Kennedy, and Solnet 2018; Wirtz et al. 2018), and only recently, consumer responses to service robots (Jörling, Böhm, and Paluch 2019; Mende et al. 2019). However, when service delivery by robots becomes widespread, it will be important to know how people react to service failures and recovery attempts—the focus of the present research.
We contribute to the literature on anthropomorphism (Epley, Waytz, and Cacioppo 2007) and services management by examining consumer reactions to humanoid (vs. nonhumanoid) robots. We build on prior research suggesting that people’s reactions to robots depend on both their functional and social abilities (Huang and Rust 2018; Tung, Sun, and Au 2018; Wirtz et al. 2018). Previous research suggests that consumer responses to service delivery by robots can be explained not only by functional factors, such as perceived behavioral control over the robot (Jörling, Böhm, and Paluch 2019) and perceived value of using the robot (de Kervenoael et al. 2020) but also by affective factors such as a feeling of discomfort, perceived threat to human identity, and a concern that one’s unique characteristics are neglected (Longoni, Bonezzi, and Morewedge 2019; Mende et al. 2019). Extending this stream of research, our findings suggest that social cognition perceptions—warmth and competence perceptions—toward service robots can also explain how consumers react to service delivery by a robot. Specifically, we find that, in a service failure and recovery context, warmth rather than competence appears to be critical. Indeed, as a result of anthropomorphism, humanoids (vs. nonhumanoids) are more strongly associated with warmth. This can be a liability following a service failure (resulting in greater dissatisfaction for process, but not outcome, failures) and advantage during the service recovery process (resulting in greater satisfaction when robots recover via apology and explanation). In contrast, nonhumanoids seem to be incapable of recovering from service failures by providing an apology or an explanation due to their lack of social capabilities. Moreover, we find that nonhumanoids can leverage human intervention in the recovery effort, such that a human service provider’s sincere apology can add social benefits that nonhumanoids may fail to deliver. These findings provide important insights with respect to how service firms can enhance service recovery satisfaction in human-robot-collaborated service encounters (Rafaeli et al. 2017; Van Vaerenbergh et al. 2019). Answering the call for scholarly attention to find a balance between robot and human roles in technology-empowered service encounters (Larivière et al. 2017; Rafaeli et al. 2017), our findings suggest that human employees can still play an important role by compensating for the lack of warmth associated with nonhumanoids.
Pragmatic Implications
The emergence of humanoid service robots is increasingly replacing human service providers in various service sectors (Harris, Kimson, and Schwedel 2018). For example, about 70% of hotel managers expect the use of service robots in customer-contact service delivery (e.g., greeting, check-in/checkout) to be in mass adoption by 2025 (Nicholls 2018). Robot engineers try to design robots to look and behave similarly to humans (e.g., humanoids) in order for people to interact with robots more intuitively and naturally (Broadbent 2017). However, our findings suggest that the decision to use humanoids or nonhumanoids should be approached with caution, as each can be disadvantageous in certain situations (see Table 1 for the summary).
Practical Implications.

First, we show that consumer reactions to service failures by robots depend upon the features of such robots—whether they contain more humanlike features (e.g., face, arms, name, and voice; i.e., humanoid) or not (i.e., nonhumanoid). Humanlike features influence the extent to which consumers attribute social capabilities (i.e., anthropomorphism) like warmth to service robots, thus influencing their responses to service failures and to recovery efforts. Specifically, consumers who anthropomorphize robots may react more negatively to process failures by humanoid (vs. nonhumanoid) robots due to violation of warmth expectations (Study 1). Consequently, service managers and robot designers should be attentive to the design of robot features to ensure an appropriate match with social interaction programming. For example, Pepper and Connie, the popular examples of humanoids at hotels, need to be carefully programmed with sophisticated interpersonal and social skills (e.g., use of professional and polite language in interactions) to minimize process failures. Applying advanced technologies, such as visual recognition, will allow robots to be more attentive and to offer personalized services to customers. Recently, developers are making nonhumanoids that display humanlike facial expression emoticons on their monitors (e.g., HOSPI by Panasonic). It is possible that adding such warmth-cues to nonhumanoids may heighten consumers’ warmth expectations. If so, consumers may show similar reactions to process failures by nonhumanoids, and therefore, nonhumanoids also need to be programmed with advanced interpersonal skills.
Second, our findings offer managerial insights into robots’ ability to effectively recover from service failures (Studies 2A, 2B, and 3). Given greater warmth perceptions, humanoids appear to be able to effectively recover from service failures by delivering apologies and explanations. Conversely, both recovery strategies seem less effective for nonhumanoids. Thus, humanoids may be programmed to analyze and detect service process failures (e.g., slow service) and apologize or explain such failures to customers. In addition, managers should consider the need for human intervention (such as offering an apology) with robot service failures. While such intervention may be unnecessary with humanoids, our work suggests that such practices can be effective when recovering from service failures caused by nonhumanoids. Nonetheless, to better respond to customer dissatisfaction following a service failure caused by a robot, advanced AI technologies, such as natural language processing, voice stress analysis, and facial expression recognition, are required. Such AI technologies will be helpful not only in service recovery attempts but also in enhancing consumers’ overall service experiences (Cibenko, Dunlop, and Kunkel 2020).
Finally, our research suggests the need for a broader strategy regarding the deployment of robots in service settings. Service robots should be designed with features to match their role in a specific service setting. This applies not only to their appearance and programming (as discussed above) but also to the service context within which they operate. Service firms should map out their service blueprints (Bitner, Ostrom, and Morgan 2008) in order to figure out what type of a service robot to be deployed at each stage of the service delivery process (i.e., matching service task and robot type). By doing so, service managers can better predict what customers expect, to manage occasional service failures, and thus maximize service satisfaction. For instance, companies should be more cautious in deploying humanoids than nonhumanoids in tasks with frequent interactions with customers that create more opportunities for process failures by service robots. Furthermore, in the contexts of this research (hotels and restaurants), consumers appear particularly prone to focus on social capabilities such as warmth. Accordingly, humanoid robots may be more advantageous, assuming they can be programmed with an appropriate level of empathetic intelligence to understand consumers’ emotions. However, there might be other contexts where consumers are more likely to focus on functional capabilities such as competence (e.g., banking), thus attenuating the advantages of humanoids. Here as well, it will be important to find ways for humans and robots to collaborate in the effective delivery of service, including service recovery.
Limitations and Future Research
We acknowledge several limitations of our research. Our experiments relied upon scenario-based research, bolstered by a 3D simulation in Studies 2A and 2B. Although there is precedent to do so (especially given the context of service failures and service recovery, where field studies are challenging), future research with actual service robots in a field setting is needed. Indeed, the scope for future work on this topic is vast, and we suggest the following as potentially promising avenues for future research.
Context
How do consumers’ reactions to robots vary by service context? The service settings that we examined arguably emphasize communal norms that align with the importance of warmth (Mende, Scott, and Bolton et al. 2018; Scott, Mende, and Bolton 2013). If so, how would consumers react to service robots in exchange settings that focus on competence? Our findings, for example, might predict a diminished effect of robot type in such contexts whereby humanoid and nonhumanoid robots might result in similar reactions following process failures due to lack of importance of warmth inferences (Mende, Scott, and Bolton 2018). It would also be worth investigating the effectiveness of other aspects of recovery methods (e.g., compensation, timeliness; Wirtz and Mattila 2004) delivered by service robots or other recovery strategies such as a human service provider’s direct intervention without a robot’s recovery.
Consumers
How do consumers vary in their reactions to service robots? Consumers’ levels of technology readiness (Parasuraman 2000) or consumer innovativeness (Zhu et al. 2013) may influence their acceptance of changes and trust in technology-infused service provision. Consumers with relatively higher levels of technology readiness are more ready to embrace and use the new technology, which may increase their sensitivity to robot capabilities in delivering warmth and competence appropriate to the situation. Consumers with relatively lower levels of technology readiness may be more attuned to socioemotional aspects of the encounter, including warmth but also discomfort or threat to human identity (Mende et al. 2019; Parasuraman and Colby 2015).
Robots
How do consumer responses to robots vary by their design characteristics? For example, Eyssel and Hegel (2012) found that people perceive male robots as more agentic and intelligent than female robots, while they view female robot as more communal and sociable. Such insights raise a question of whether human-related stereotypes (e.g., regarding gender or age) influence consumer responses to service failures and recovery attempts by service robots. Future research should also investigate whether different features of robots (e.g., voice or appearance) could elicit different levels of anthropomorphism, resulting in different responses toward service failures and recovery efforts. Finally, it would also be worth examining how consumers react to humanoid robots with extremely humanlike appearance that could evoke perceived uncanniness of the robots (e.g., Kim, Schmitt, and Thaimann 2019; Mende et al. 2019). Do service failure/recovery settings reverse or hold the uncanny valley effect (i.e., negative reaction toward an extremely-humanlike robot)?
Supplemental Material
Supplemental Material, Robot_Failure_Executive_summary - To Err Is Human(-oid): How Do Consumers React to Robot Service Failure and Recovery?
Supplemental Material, Robot_Failure_Executive_summary for To Err Is Human(-oid): How Do Consumers React to Robot Service Failure and Recovery? by Sungwoo Choi, Anna S. Mattila and Lisa E. Bolton in Journal of Service Research
Supplemental Material
Supplemental Material, Robot_Failure_Web_Appendix - To Err Is Human(-oid): How Do Consumers React to Robot Service Failure and Recovery?
Supplemental Material, Robot_Failure_Web_Appendix for To Err Is Human(-oid): How Do Consumers React to Robot Service Failure and Recovery? by Sungwoo Choi, Anna S. Mattila and Lisa E. Bolton in Journal of Service Research
Footnotes
Appendix
Measurement Items.

| Study | Measures | Cronbach’s α/r | Source |
|---|---|---|---|
| 1 | Service satisfaction (7-point semantic differential scale) 1. Very unfavorable/Very favorable 2. Very negative/Very Positive 3. Bad/Good Warmth (1 = not applicable at all, 7 = extremely applicable) 1. caring 2. friendly 3. kind 4. warm 5. sociable Competence (1 = not applicable at all, 7 = extremely applicable) 1. intelligent 2. energetic 3. organized 4. motivated |
.97 .96 .86 |
Li, Chan, and Kim (2018); Judd et al. (2005)
|
| 2A | Service satisfaction (same as Study 1) Warmth (1 = not applicable at all, 7 = extremely applicable) 1. caring 2. helpful Competence (1 = not applicable at all, 7 = extremely applicable) 1. competent 2. capable |
.95 .76 .81 |
Li, Chan, and Kim (2018); Bolton and Mattila (2015) |
| 2B | Service satisfaction (same as Study 1) Warmth (same as Study 2A) Competence (same as Study 2A) Behavioral choice (0 = no, 1 = yes) Are you willing to revisit this restaurant in the future? |
.97 .83 .78 |
Li, Chan, and Kim (2018); Bolton and Mattila (2015) |
| 3 | Service satisfaction (1 = strongly disagree, 7 = strongly agree) 1. In my opinion, the hotel provided a satisfactory resolution to my problem on this particular occasion. 2. I am not satisfied with the hotel’s handling of this particular problem. (R) 3. Regarding this particular event, I am satisfied with the hotel. |
.94 | Maxham and Netemeyer (2003) |
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors thank the Marriott Foundation and Penn State School of Hospitality Management Grimes-Nicholson Technology Award for the funding of this research.
Supplemental Material
The supplemental material for this article is available online.
Notes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.