
Abstract
This article presents theoretical studies for parametrically excited vibrations of marine riser of the floating production, drilling, storage, and offloading system under random wave forces and earthquake excitation. The equation of motion of the riser is obtained by a mathematical method utilizing Euler beam theory and Galerkin method. The trigonometric series method is used to formulate random wave force and earthquake excitation in time domain. The dynamic analysis, spectral response analysis, and key parameters’ sensitivity analysis are conducted for the riser system. Parameter studies are conducted for the effects of wave and earthquake parameters and structural parameters on dynamics response of the riser system. The results from this study can provide valuable recommendations for the design and construction of the parametrically excited marine riser system under random wave forces and earthquake excitation and can promote widely practical application of the deep water riser in complicated environmental conditions.
Keywords
Introduction
The oil and gas industry has extracted hydrocarbon resources from a great number of petroleum reserves located in the ocean. Many of these field developments require a stand-alone production and storage facility with drilling facilities. A floating production, drilling, storage, and offloading (FPDSO) unit is the natural solution, which combines the well-established floating production, storage, and offloading (FPSO) unit with a drilling unit. One of the proposed forms of FPDSO benefits from the mature technology of the tension leg deck (TLD). TLD is based on using the gravity of weights, instead of buoyancy, as in the existing dry tree concepts, as a means to pretension risers. Marine risers are structures that employed to convey gas and oil between top-end vessel and sea bed. With the development of oil and gas exploration toward deeper ocean, the use of marine risers is vital for oil and gas production.
The risers operate in the ocean for a long time and are subjected to various environmental conditions like ocean wave, current, and earthquakes and are affected greatly by the dynamic coupling between the motion of the floating hull in waves and marine riser. Of all mentioned, wave is one of the most important and complicated environmental factors and is random, which may induce the failure of the whole structure. Besides, most of oil/gas resources are in the Circum-Pacific seismic belt, the most active seismic zone in the world; the effect of earthquake may be very significant. It is noted (Duan et al., 2010) that 85% of the total amount of the earthquakes occurs in the ocean. Research on subsea risers in seismic conditions is one of the academic and engineering attractions in offshore engineering.
The riser has been an interesting topic in marine structure research; it was studied in the aspects of axial dynamic analysis in installation, natural frequency analysis considering multiphase internal flow behavior, modeling, and nonlinear dynamics analysis (Dai et al., 2014; Montoya-Hernández et al., 2014; Wang et al., 2014c), and so on. The riser will suffer considerable wave-induced vibration and vortex-induced vibration, which can last for almost the whole design life in harsh environments. The vibration of the riser in the cross-flow direction is dominated by vortex-induced resonance phenomena, and a considerable amount of work has been done (Chen et al., 2014; Quen et al., 2014; Wang et al., 2014a), but there are few researches on wave-induced vibration; Lei et al. (2014) presented dynamic analysis of the riser on wave-induced vibration in frequency domain. Although the earthquake has significant effect on the riser, few results have been reported for riser seismic dynamic analysis except those from Duan et al. (2010) and Li et al. (2013). Some researchers (Nguyen, 2015; Su and Sun, 2013; Wang et al., 2014b) presented various computational methods for analyzing seismic-induced vibration of suspended cables, cracked beam-like bridge, and high-strength concrete pile. However, the study of dynamic response on the riser under combined effect of random wave forces and earthquake excitation has not been seen yet. To keep the safety of the drilling system, the needs to understand and design for dynamic behavior of parametrically excited riser in deep water under random wave forces and earthquake excitation become essential.
In this study, the marine riser of FPDSO in oil and gas industry under random wave forces and earthquake excitation is taken as the research background. The equation of motion of the rise is obtained by Euler beam theory and Galerkin method. Random wave force and earthquake excitation in time domain are made by trigonometric series method. The dynamic analysis, spectral response analysis, and key parameters’ sensitivity analysis are made for the riser system.
Methodology
Equation of motion for the riser
In the TLD system of FPDSO, four equivalent risers are fixed symmetrically at the four corners of the deck, while there are four weights in the water. Thus, the TLD system can be simplified as a one-quarter model; Figure 1 shows the simplified model of parametrically excited marine riser of the TLD system, with its coordinate system origin at the anchored point of sea bed.
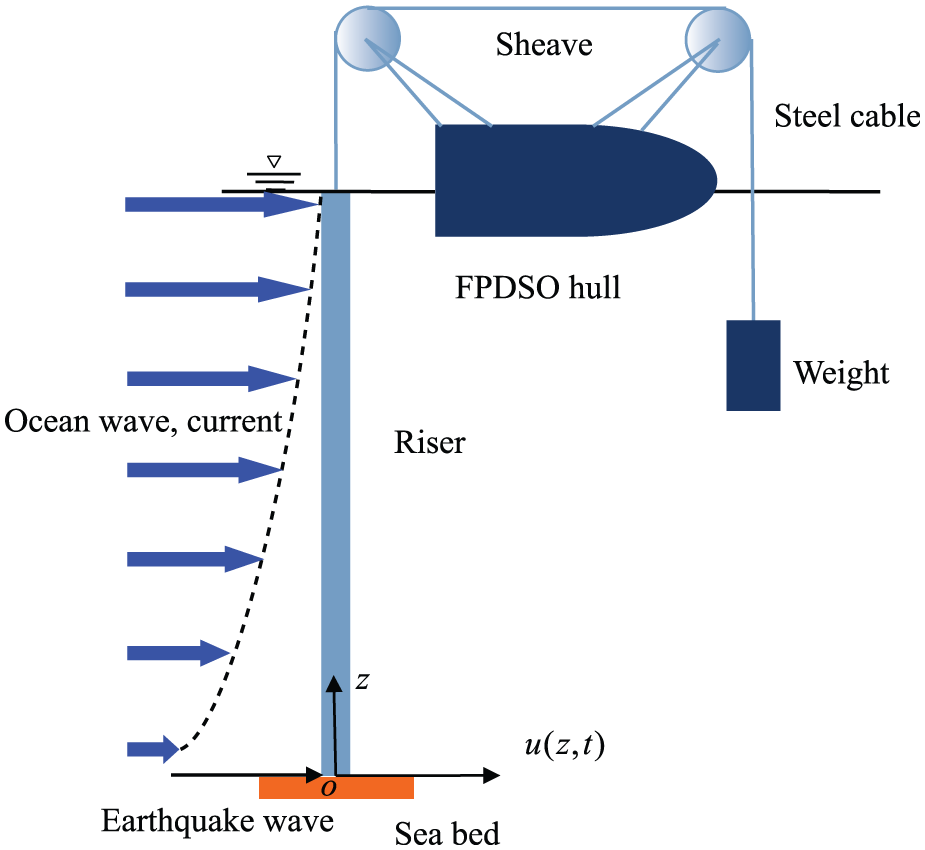
Simplified model of parametrically excited marine riser of the TLD system.
As the mooring constraints, the horizontal motion of the hull is assumed as small, so that the hull is oscillating primarily in the vertical direction, thus the heave motion of the hull can be expressed as (Lei et al., 2014)

where
The friction between the steel cable and the sheave is ignored; the dynamic tension of the riser based on Newton’s second law can be expressed as

where
Substituting equation (1) into equation (2), we have

where
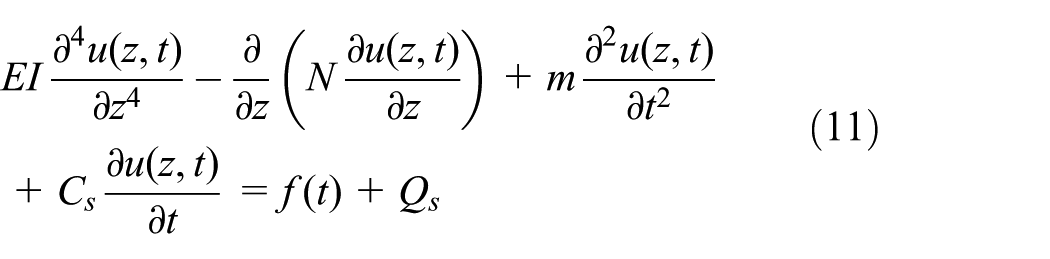
The three-dimensional dynamic behavior of the riser will be induced by out-of-plane excitation and is very complicated to solve. To simplify, the marine riser can be modeled as a Bernoulli–Euler beam (Chen et al., 2015; Rao et al., 2015), which is the classical method which implies that only the in-plane motions of the riser are considered. Besides, the conserved assumption is adopted, that is, the riser under combined effect of random wave forces and earthquake excitation in the same direction is considered to obtain the largest structural dynamic response. Thus, the directions of earthquake wave and wave force are shown in Figure 1, and the riser can only move in in-line direction. The current velocity of the ocean is small which leads to the vibration of the riser in the cross-flow direction by vortex-induced resonance being small. And the horizontal earthquake excitation acts on the anchoring point of the riser. Thus, the dynamic behavior of the top tensioned riser can be modeled as a Bernoulli–Euler beam, and its governing equation is
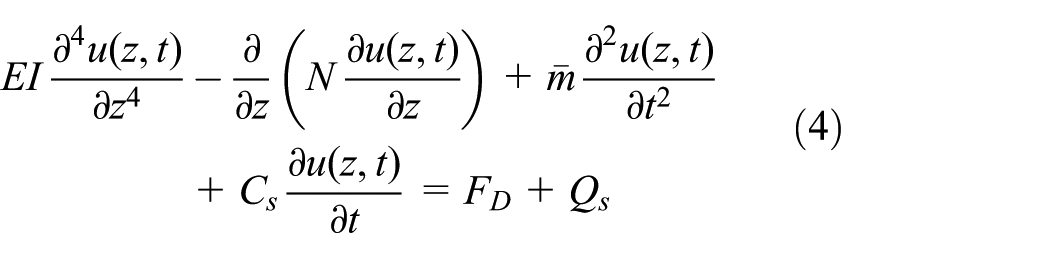
where
As modeled as pinned at two ends, the boundary conditions at the end of the riser are given as

Formulation of random wave force in time domain
where

where d is the water depth, k is the wave number,
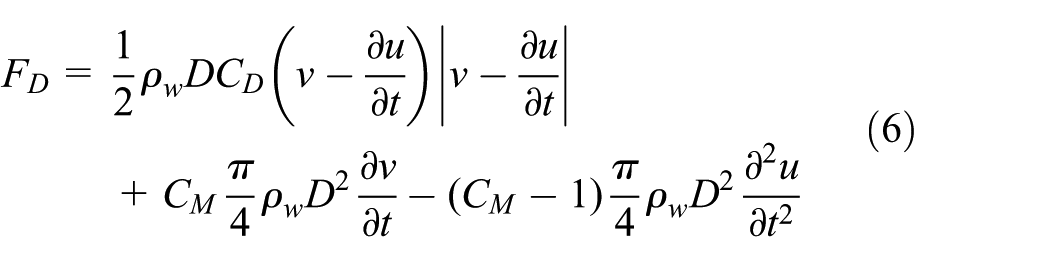
The first term in equation (6) represents the nonlinear drag force due to the relative motion between the fluid and the structural response, and it acts effectively to dampen the motion response of the marine riser. Morison’s equation cannot be utilized in the form of equation (6) for linear spectral analysis because of its nonlinearity. Often in practice the nonlinear drag force is linearized resulting in the separation of the kinematic contributions (Niedzwecki and Liagre, 2003). The nonlinear drag force (i.e. the first term in equation (6)) is given by

where
Sarpkaya and Isaacson (1981) consider an approach where the quadratic term of the drag force due to the relative fluid velocity is replaced by a linear expression involving the root mean square value of the relative velocity

Thus, the wave force can be linearized as (Lei et al., 2014; Niedzwecki and Liagre, 2003)
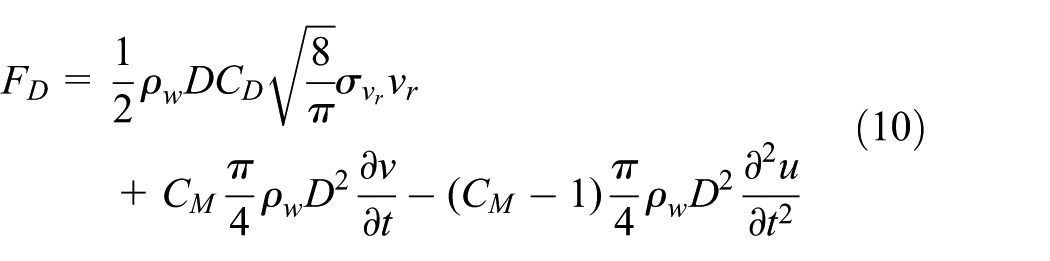
Often as a first approximation (Bao et al., 2013; Chatterjee and Chakraborty, 2014; Niedzwecki and Liagre, 2003), the wave damping due to the relative motion can be simplified assuming that
Substituting equation (10) into equation (4)
The first two terms in equation (10) contribute to the time-varying wave force
Then, the power spectrum of wave force
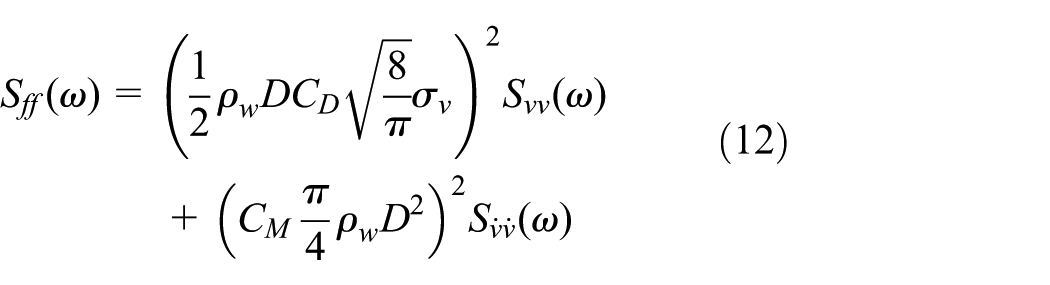
where
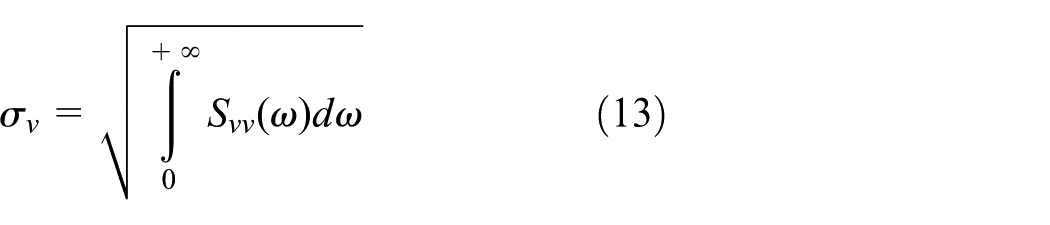
The spectral densities for the horizontal wave velocity and wave acceleration are given by (Borgman, 1967)


The irregular wave conditions can be expressed by the Pierson–Moskowitz wave spectrum (Pillai and Prasad, 2000)

where
The random wave force acting on the riser can be modeled as a zero mean ergodic Gaussian process consistent with the usual random model for ocean waves; the wave force can be expressed as (Chatterjee and Chakraborty, 2014)

where
In this study, the classical method, that is, random phase spectrum method (Bao et al., 2013; Chatterjee and Chakraborty, 2014; Niedzwecki and Liagre, 2003), is used to simulate the random wave force in the time domain. The statistical properties of

where
Formulation of earthquake excitation in time domain
The earthquake excitation in time domain can be expressed as

where
As the process time of earthquake random excitation is transitory, the non-stationary characteristics of random excitation should be considered. Using evolutionary theory of power spectrum density (Bi and Hao, 2012), the non-stationary random process can usually be written as the product of a stationary random process and a deterministic slowly varying modulation function

where
The deterministic envelope function

where
In order to define

where
In engineering practice (Bi and Hao, 2012), design target response spectrum for a given site is more commonly available instead of the ground motion power spectrum density function. Therefore, it will be very useful to generate ground motion time histories that are compatible to the given design target response spectrum.
For a given design target acceleration response spectrum

where
The design target acceleration response spectrum is determined by basic parameters of seismic intensity, site classification, peak acceleration, and damping ratio of practical condition in engineering. According to the Chinese code for seismic design of buildings (GB 50011-2010, 2010), the design target acceleration response spectrum can be expressed as in Figure 2.
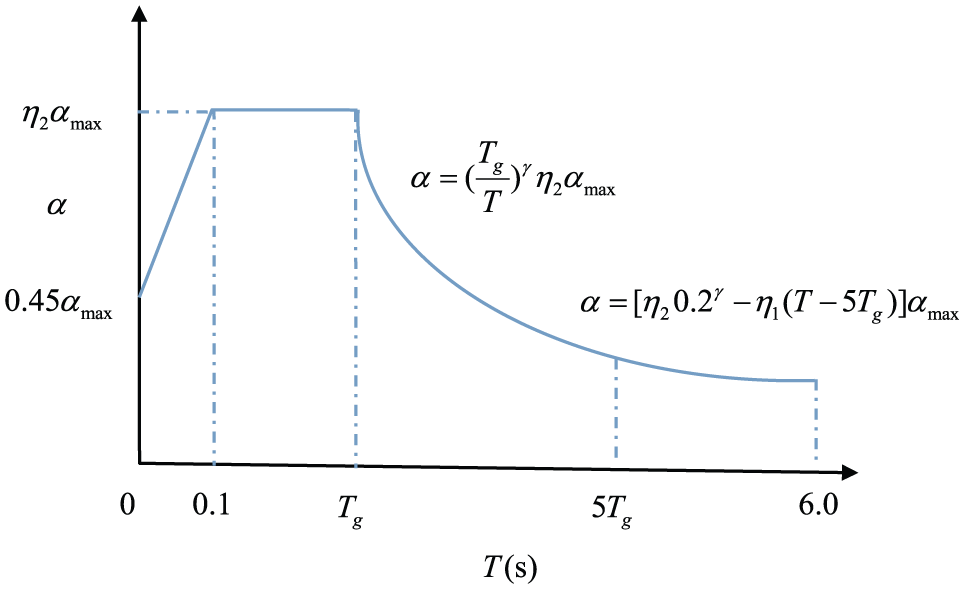
Design acceleration response spectra in the Chinese code for seismic design.
In Figure 2, where abscissa T is the natural period of the structure, ordinate
The coefficients



Using the above approach, the generated ground motion time histories usually match well with the design target response spectrum. If the response spectrums of the generated time histories do not match satisfactorily the design target spectrum (Bi and Hao, 2012), iterations need to be carried out by adjusting the power spectrum density function until satisfactory compatibility is achieved.
Solution of the equation
By separation of variables, vibration mode of the riser may be expressed as

where
where
And the nth order vibration mode is written as
where
To obtain an approximate solution of equation (4), Galerkin method is applied to transform the partial differential equation into a set of ordinary ones. Substituting equation (27) into equation (4), multiplying each term by
with

where
Equation (30) can be expressed as matrix from

where
The details of equation (35) are as follows




where
As the first mode is dominated in the motion equation of the riser, and for simplicity, only the first third-order modes are taken into account.
Because the excitation is random, the stochastic responses of the risers are often solved in the frequency domain. To estimate the response spectrum of the riser under random wave forces and earthquake, spectral analysis for the system is made.
The displacement response of equation (35) can be obtained by Duhamel integration

where
Then equation (41) can be written as
For a specified time t, equation (42) can be calculated from the following equation
Thus, the relative displacement spectra



where
From equation (43), equations (44) to (46) can be written as (Gupta, 1992; Pour et al., 2011)


Numerical results and discussion
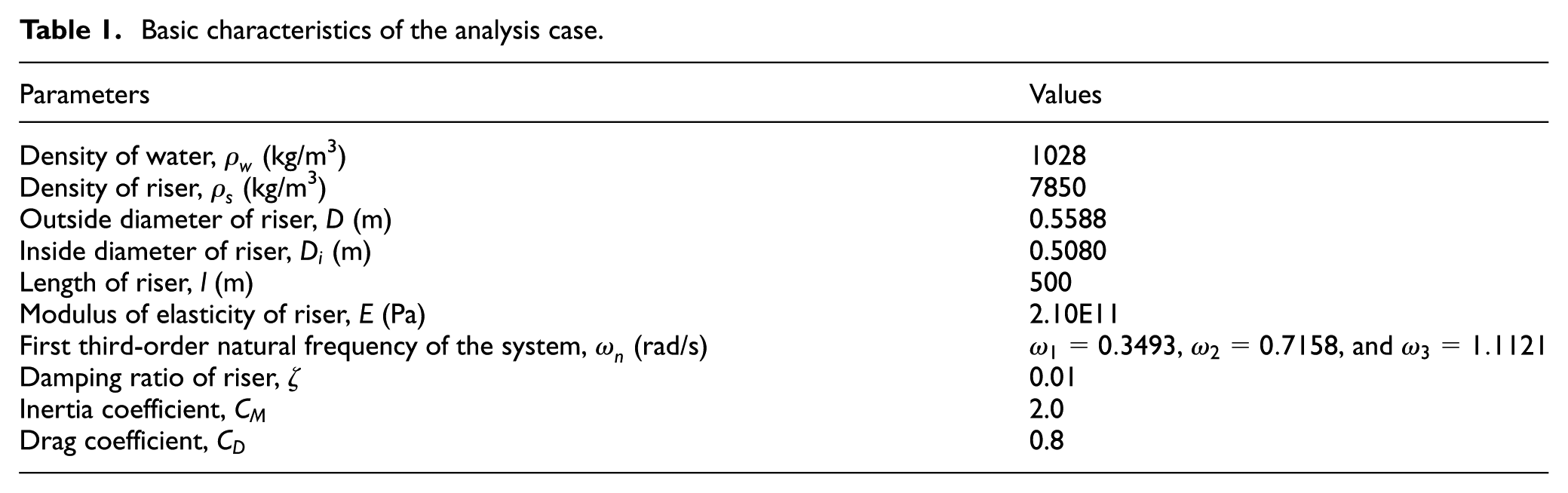
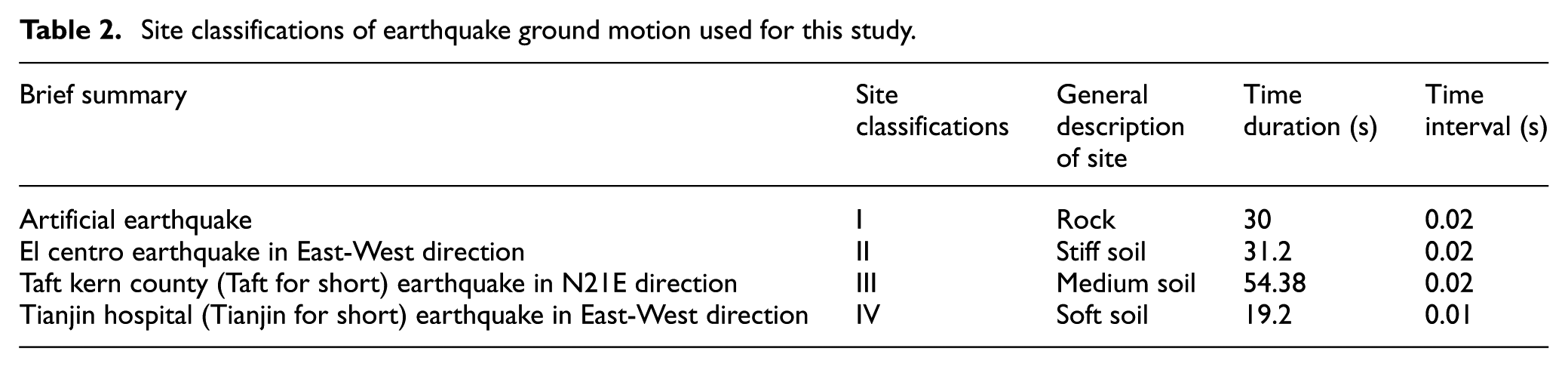
A design scheme of FPDSO and its riser is selected as an illustrative example for numerical study using MATLAB program, and its physical and geometric parameters are listed in Table 1. With aforementioned methodology, a typical simulated time-history of random wave force for per unit length of riser is shown in Figure 3, with its time duration and time interval being 200 and 0.02 s, respectively. According to the Chinese code for seismic design of buildings (GB 50011-2010, 2010), four earthquake waves in four site classifications are selected in this study. And for fair comparison, their peak accelerations are adjusted to
Basic characteristics of the analysis case.
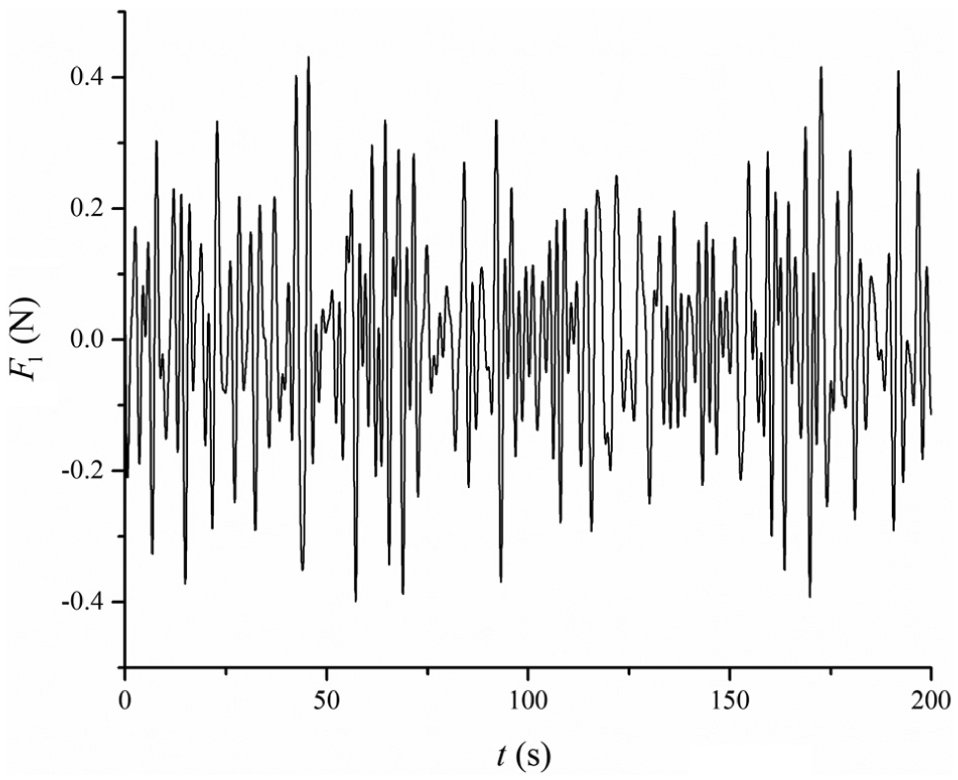
The first-order random wave force time-history for per unit length of riser.
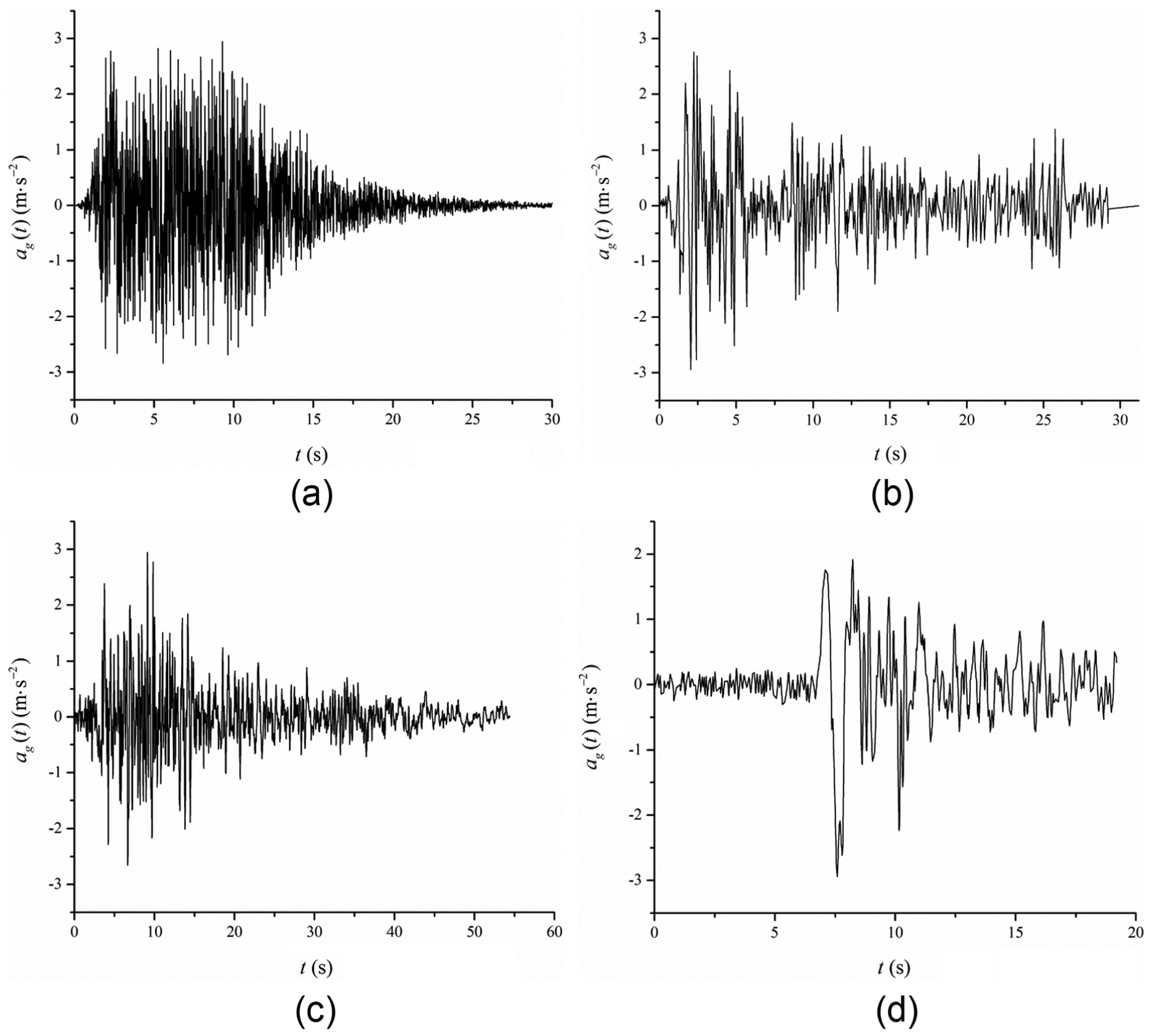
Four earthquake waves’ time-history in four site classifications: (a) artificial earthquake (I), (b) El centro earthquake (II), (c) Taft earthquake (III), and (d) Tianjin earthquake (IV).
Site classifications of earthquake ground motion used for this study.
The fourth-order Runge–Kutta method is used to solve the differential equation (30); each mode response of the riser under random wave forces and earthquake may be obtained. By substituting the first third-order mode response into equation (27), the displacement response of the riser may be obtained.
Dynamic response analysis
Figure 5 shows the mid-span displacement time-history of the riser when in different heave excitation frequencies under Tianjin earthquake. When the riser is subjected to the earthquake wave in parametric excitation
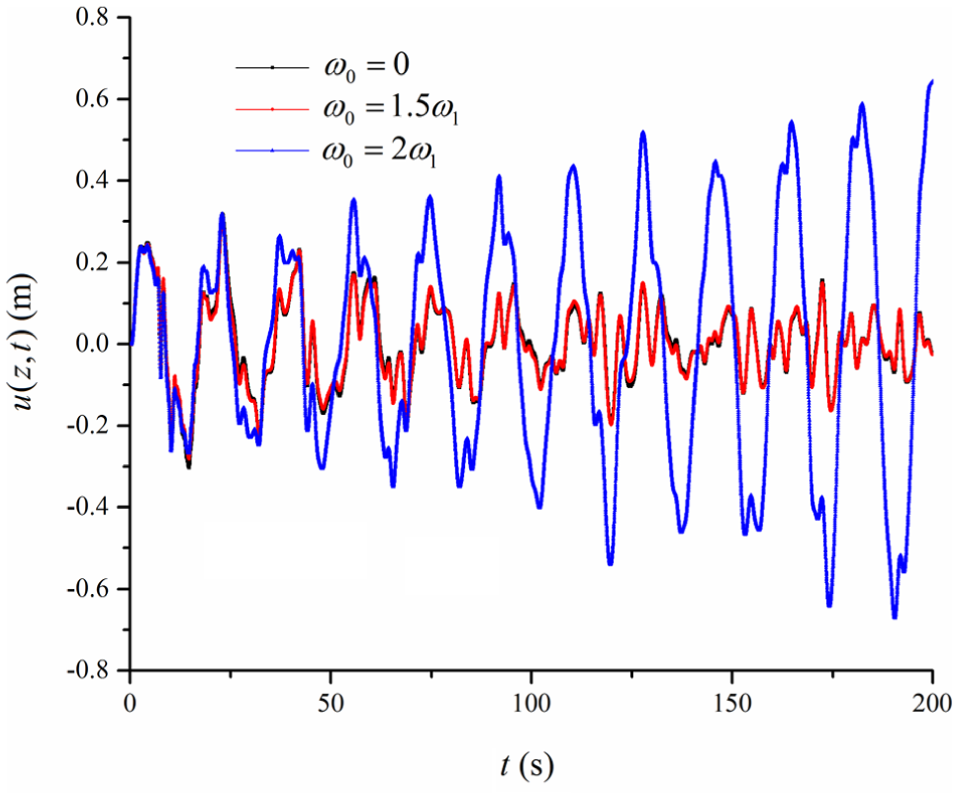
Mid-span displacement time-history of the riser when in different heave excitation frequencies under random wave force and Tianjin earthquake.
The random wave force and four site classifications’ earthquakes are, respectively, applied to the vibration response analysis of the riser. Figures 6 and 7 present, respectively, the displacement curves in the parametric excitation
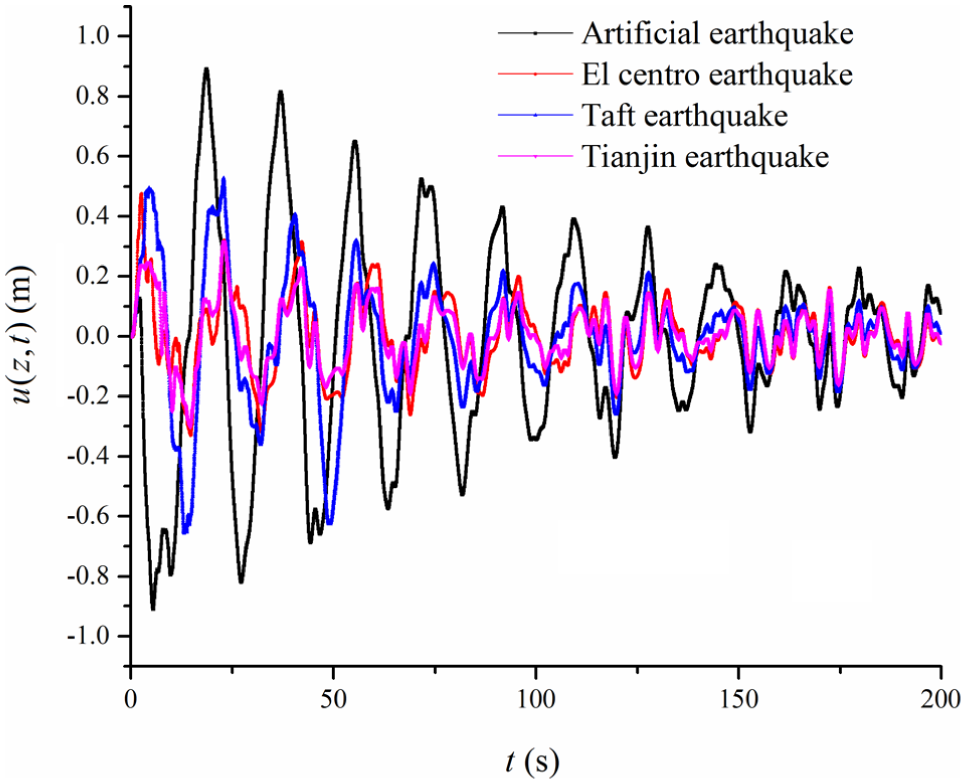
Mid-span displacement time-history of the riser when in excitation frequency
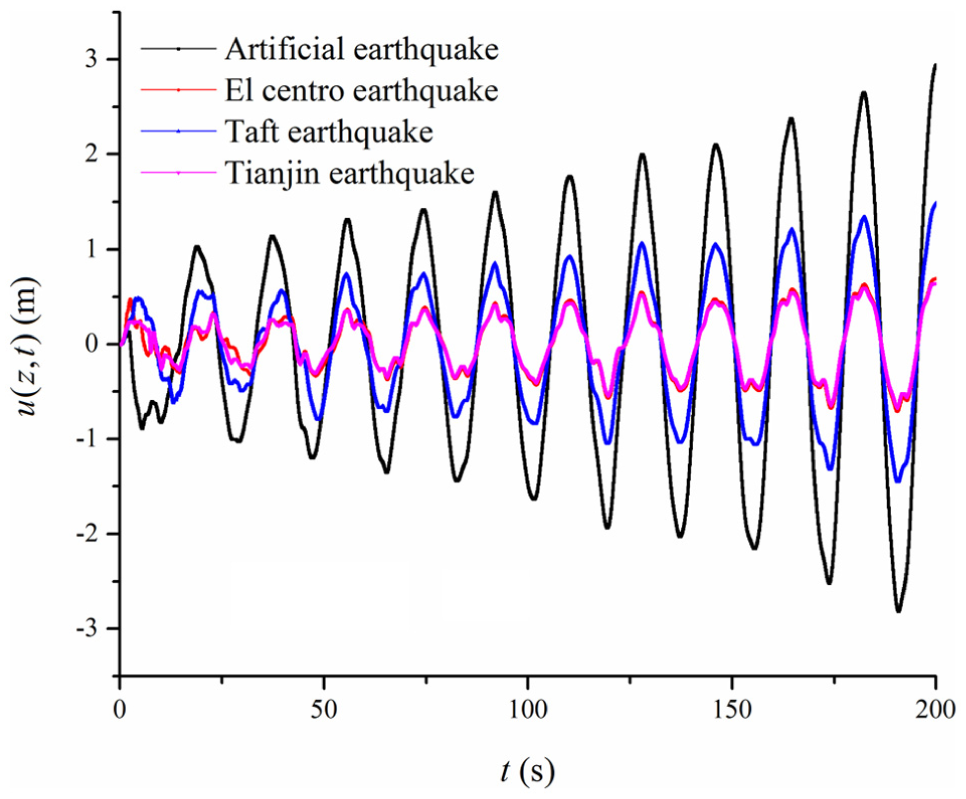
Mid-span displacement time-history of the riser when in excitation frequency
To explore the effect of earthquake alone on the riser, while ignoring wave force, Figure 8 shows the results. As shown in Figure 8(a), with the parametric excitation frequency satisfying the parametric resonance condition, the vibration response of the riser under Tianjin earthquake alone dies out quickly when the earthquake is over. While in Figure 8(b), the vibration response of the riser under artificial earthquake alone adds with the time even though the earthquake is over. And the motion amplitude of the riser under artificial earthquake alone is obviously larger than the one under Tianjin earthquake alone. With insufficient damping ratio, as the energy of artificial earthquake is obviously larger than of Tianjin earthquake, larger energy and longer time duration can induce instability phenomenon easier; it can be used to explain the aforementioned results.
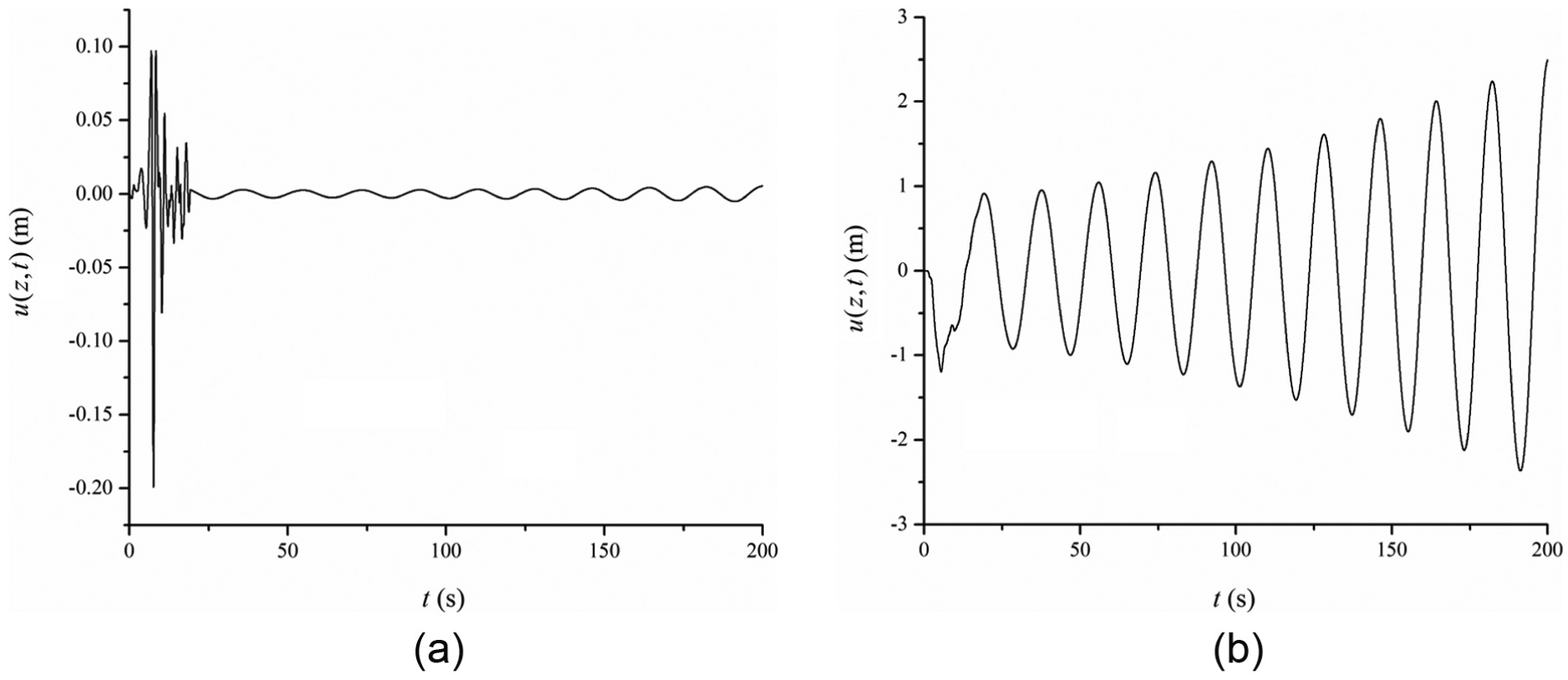
Mid-span displacement time-history of the riser when in excitation frequency
The study (Lei et al., 2014; Xia and Fujino, 2006) noted that smaller damping and larger excitation level can cause the system more unstable. When the system is stable, any small perturbation to the system would decay slowly with time. While the parametric excitation makes the system unstable, the perturbation leads to a significant vibration whose amplitude increases with time, which should be avoided in practice. The aforementioned result suggests that parametric excitation and system instability have a strong effect on the vibration response of the riser. Thus, the fundamental frequency of the riser system located in complicated marine environment should be thought over carefully to avoid parametric resonance. Based on equation (28), the key parameters for deciding the fundamental frequency of the riser are m, E, I,
Spectral response analysis
The relative displacement and absolute acceleration response spectra of the riser under wave force alone are shown in Figures 9 and 10, respectively. In Figure 9, the amplitude and energy of the displacement power spectrum is focused in a small range within
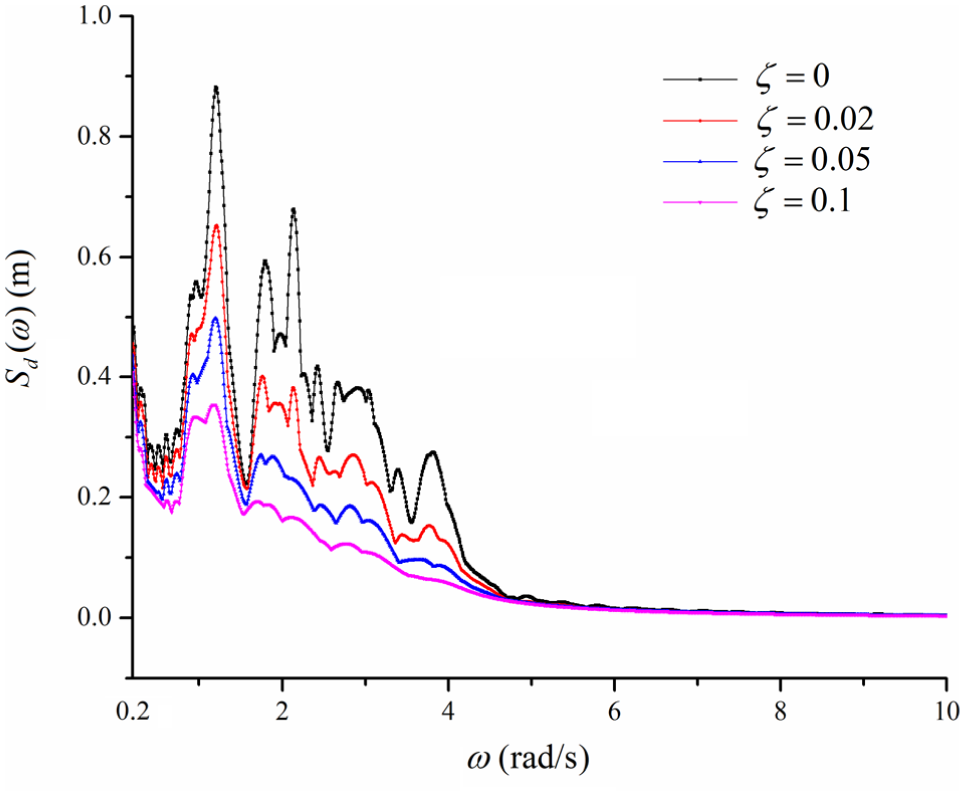
Relative displacement response spectra under wave force alone when in different damping ratios.
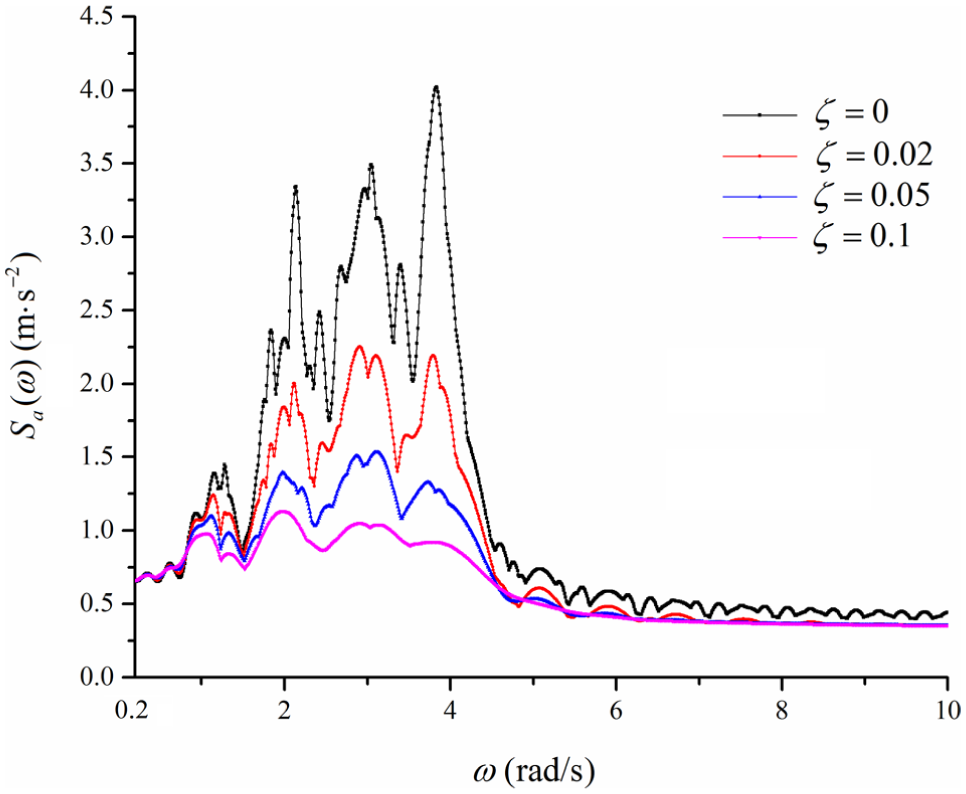
Absolute acceleration response spectra under wave force alone when in different damping ratios.
While considering the combined affect of random wave force and El centro earthquake, Figures 11 and 12 show the results. Compared with Figure 9, due to the effect of earthquake, the amplitude and energy of the displacement response spectra in Figure 11 are added; in
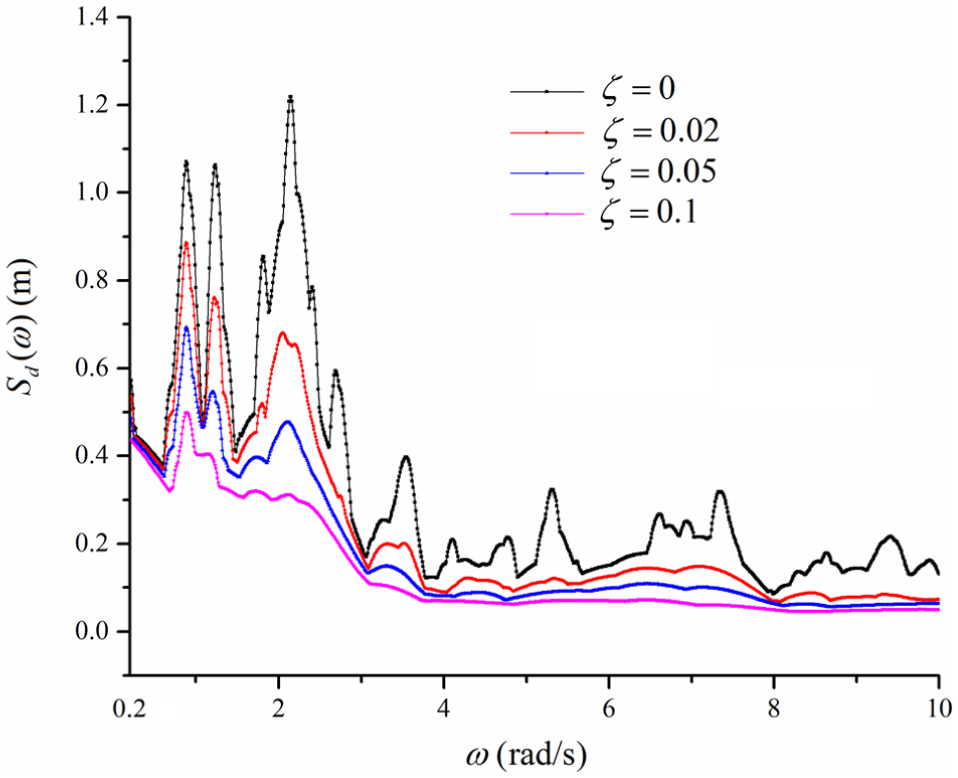
Relative displacement response spectra under random wave force and El centro earthquake when in different damping ratios.
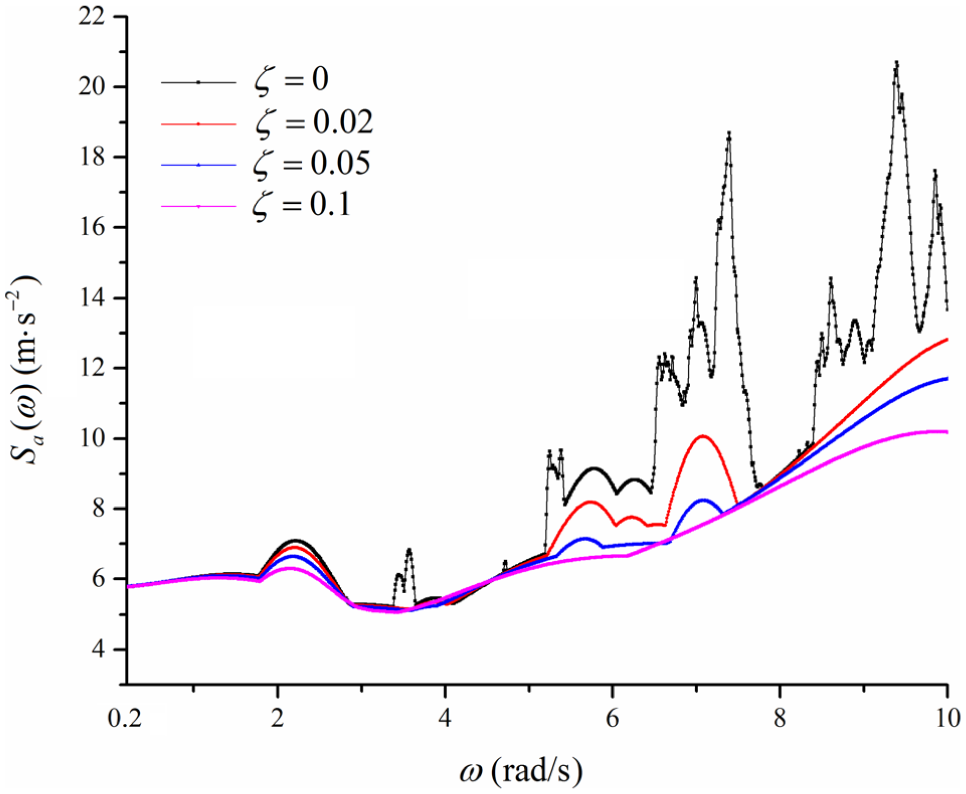
Absolute acceleration response spectra under random wave force and El centro earthquake when in different damping ratios.
The influence of damping ratio on the response spectra of the riser is also investigated, and four alternative levels of damping ratio
In preliminary design of the riser system, it is recommended that the fundamental frequency of the riser should always fall in the range of the frequencies of energy concentration zone under random wave force and earthquake excitation, and equation (28) is a basic presentation for calculating the riser frequency. For detailed design checking against random wave force and earthquake excitation, methods developed in this study are strongly recommended. And increasing the damping of the riser can reduce the motion responses of the system; large-amplitude vibration of the riser may be avoided by locating dampers on the riser or the hull.
Key parameters’ sensitivity analysis
Parameter studies are conducted for the effects of wave and earthquake parameters and structural parameters on dynamics response of the riser system; Figures 13 to 15 show the results.
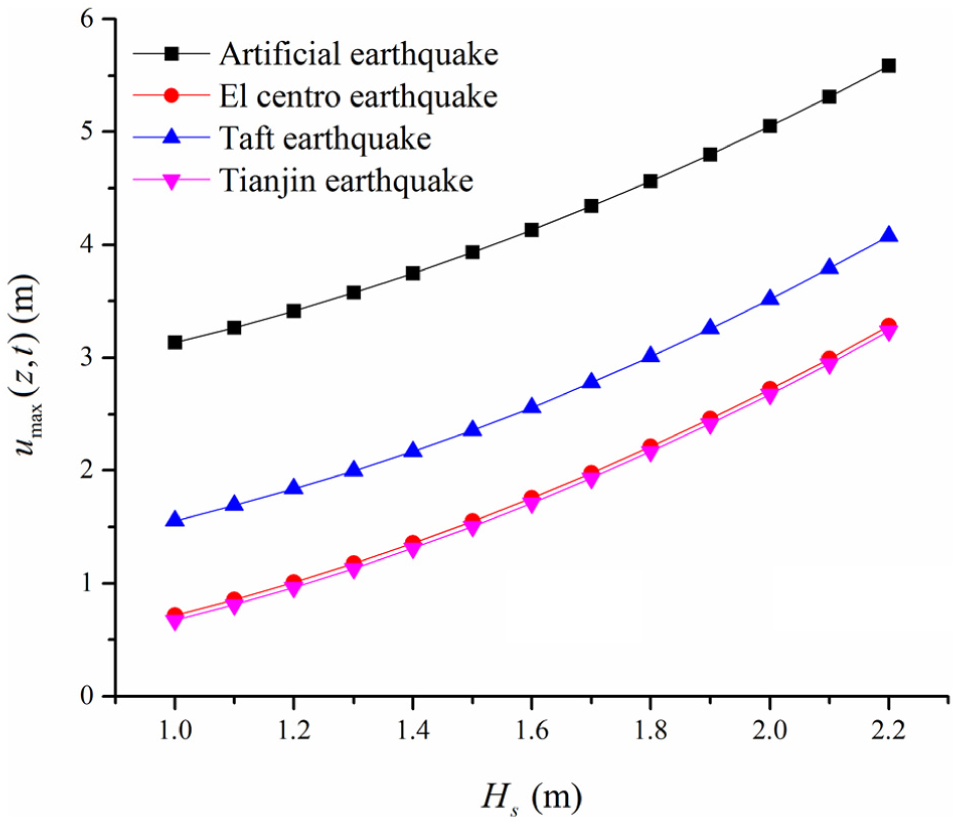
The effect of significant wave height on the maximum displacement with respect to four site classifications’ earthquakes.
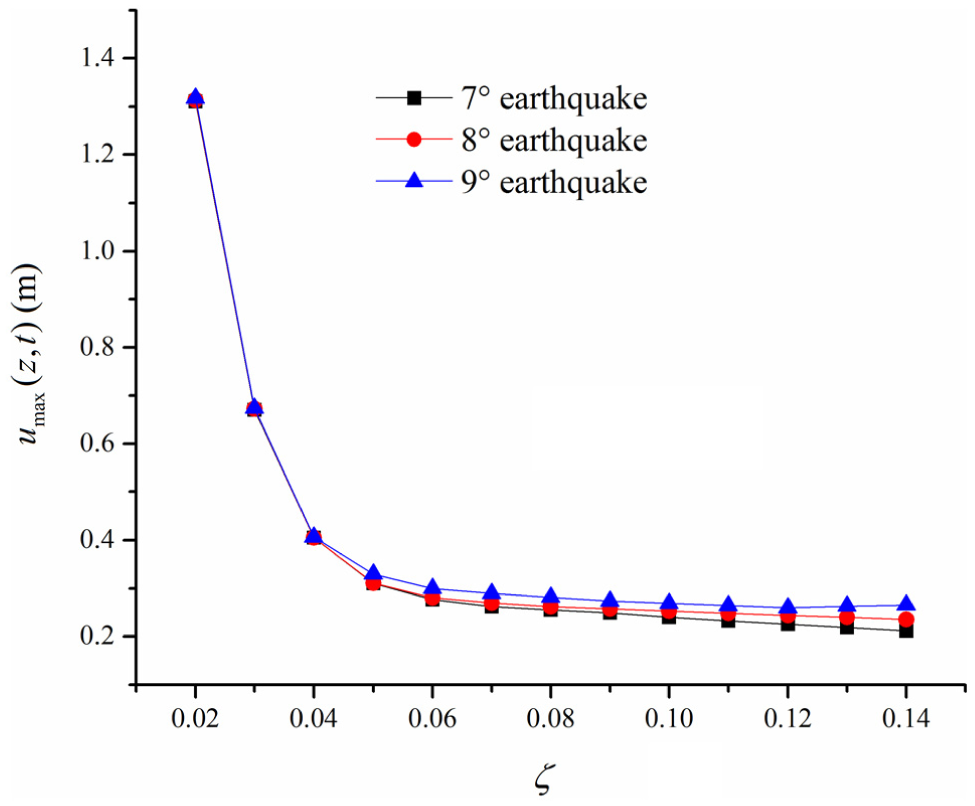
The effect of damping ratio on the maximum displacement with respect to three El centro earthquake intensities.
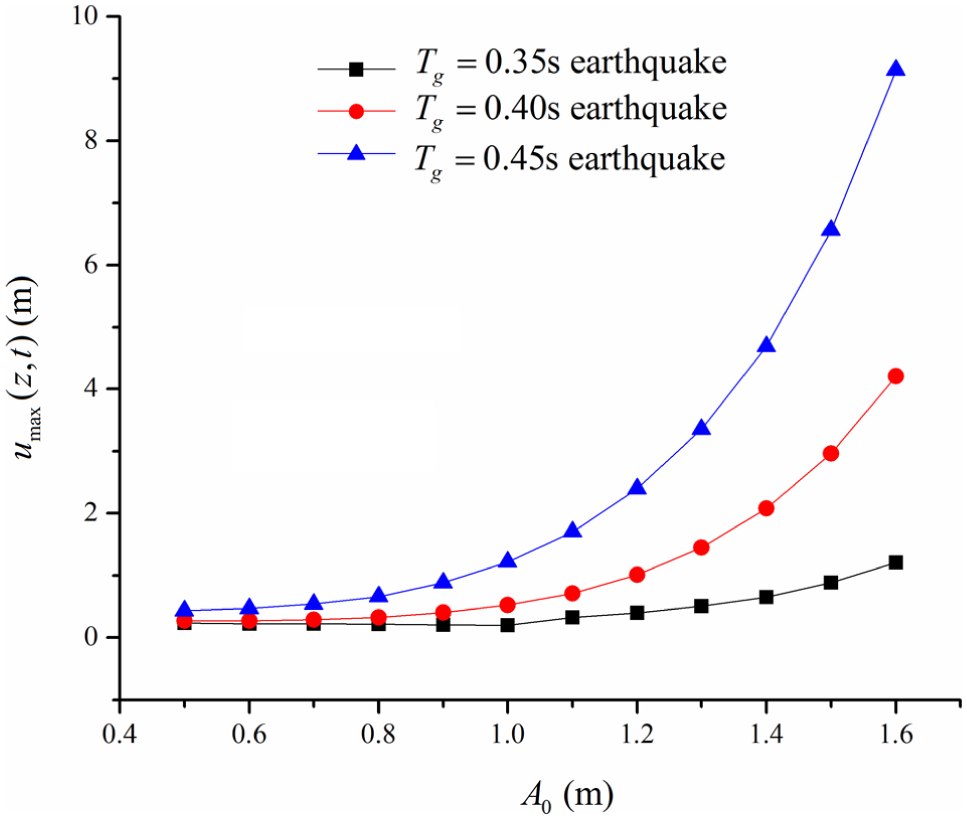
The effect of heave excitation amplitude on the maximum displacement with respect to three artificial earthquake characteristic site periods.
In Figure 13, in four site classifications’ earthquakes’ cases, the variational laws of curves are similar; the maximum value of the displacement increases with the increase in significant wave heights, which is very dangerous for the riser system. It can be expected that the difference value is huge when the significant wave height remains basically unchanged. And in significant wave heights’ cases, under different earthquake excitations, the artificial earthquake induces the largest peak response values, the Taft earthquake induces the second largest peak response values, and the Tianjin earthquake induces the smallest peak response values. Thus, the peak value of significant wave height is the most important parameter in determining the dynamic response of the riser which necessitates careful consideration during the early stage of design, especially in rock site classification foundation.
In Figure 14, it can be seen that the maximum displacement response values of the riser decrease with the increase in the damping ratio, which reveals that the damping ratio can suppress the dynamic response of the system. In this study, the peak accelerations of 7°, 8°, and 9°earthquake are adjusted to
In Figure 15, it can be seen that the maximum displacement response values of the riser are significantly increased with the increase in the heave excitation amplitude, indicating that the riser becomes much more unsafe as the hull is located in worse ocean environmental conditions. In both heave excitation amplitude cases, the maximum displacement response values of the riser increase with the increase in the earthquake characteristic site periods, and it can be expected that the difference value is huge when the heave excitation amplitude increases.
To keep the safety of the riser system, the numerical simulation in the design stage for the riser system located in complicated marine environment is necessary and significant, and the wave and earthquake parameters and structural parameters have considerable influence on the response of the riser and should be considered carefully.
Conclusion
The marine riser of FPDSO system in oil and gas industry under random wave forces and earthquake excitation is taken as the research background. The mathematical method for dynamics motion of the riser is built utilizing Euler beam theory and Galerkin method. Random wave force and earthquake excitation in time domain are formulated by trigonometric series method. The dynamic analysis, spectral response analysis, and key parameters’ sensitivity analysis are conducted for the riser system. The effects of the wave and earthquake parameters and structural parameters on dynamics response of the system under random excitation are studied. The presented study can be used to obtain valuable recommendations for the design and construction of the parametrically excited marine riser system under random wave forces and earthquake excitation and can promote widely practical application of the deep water riser in complicated environmental conditions.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (11272361, 11172333) and the Science and Technology Project Foundation of GuangDong Province (2014A020218004).