
Abstract
In this article, a novel method based on the instantaneous frequencies and amplitudes of the principal response components is presented for nonlinear joint model updating. The instantaneous frequencies and amplitudes are first extracted by a low-pass filter with Hilbert transform. Then, limited point values of the extracted instantaneous frequencies and amplitudes are applied to represent the response of the nonlinear structure. Finally, an objective function based on the residuals of instantaneous frequencies and amplitudes between experimental structure and finite element model is established using the response surface method. The optimal values of the nonlinear joint model parameters are obtained by minimizing the objective function using simulated annealing algorithm. To verify the effectiveness of the proposed method, a three-story frame with bilinear moment–rotation relationship at the beam-column joints under earthquake excitations is simulated as a numerical example. The accuracy of the proposed nonlinear joint model updating procedure is quantified using the defined error indices. The effects of the selected data point number and the weight factors in the objective function are also discussed in the article. The results indicate that the proposed method can effectively update the nonlinear joint model with high accuracy even with noise effect.
Keywords
Introduction
Over the past decades, finite element (FE) model updating that modifies the model parameters based on the experimental results to achieve a more realistic model (Friswell and Mottershead, 1995) has received increased attention in structural dynamics. Overall, FE model updating can be mainly divided into two types: matrix type and parameter type. The matrix type methods are one-step non-iterative procedures that directly update the elements of stiffness and/or mass matrices (Baruch and Bar Itzhack, 1978; Berman and Nagy, 1983). However, these methods come into the problem that the updated matrices are not always physically meaningful (Jaishi and Ren, 2005). Therefore, the parameter type methods provide a new way for FE model updating. These methods construct an objective function based on the residuals of structural response features between analytical and experimental results, and the model parameters are then updated by minimizing the objective function with different optimization algorithms. For instance, Link (1999) gave an overview of the sensitivity-based updating methods in structural dynamics. Jaishi and Ren (2005, 2007) used either single-objective or multi-objective optimization technique to update the FE models of civil engineering structures. However, these sensitivity-based methods may cause not only considerable computational intensive but also convergence difficulty especially when the real structure is complex.
To overcome the complex structural model issue, the response surface (RS) methodology (Box and Wilson, 1951) is introduced for FE model updating. With the design of experiments, the original FE model can be replaced by the RS model maintaining high accuracy for optimization purposes. For instance, Guo and Zhang (2004) applied the RS models with central composite design to update an H-shaped structure and found that the RS-based model updating method which can obtain almost the same accurate results is much more cost-efficient than the traditional sensitivity-based model updating method. Ren et al. (2010) further applied RS model to FE model updating using either structural dynamic or static responses. It was concluded that the RS method is more efficient and converges faster compared with the traditional sensitivity-based model updating method especially when the structure is complex and the number of model parameters is large.
However, complex nonlinear behavior of structures has been observed not only when they are subjected to extreme loads (such as earthquake and typhoon) but also during the operational conditions. Characterization of the nonlinearity may provide critical diagnostic and prognostic information. Thus, it is critical to know if a structure is behaving nonlinearly and to detect and estimate the impact of the nonlinearity. Hasselman et al. (1998) applied the principal component analysis for nonlinear model correlation, updating, and uncertainty evaluation. Lenaerts et al. (2001) investigated the use of the proper orthogonal decomposition for model updating of nonlinear mechanical systems. Hemez and Doebling (2001) presented a clear review and assessment of model updating for nonlinear transient dynamics. They discussed the current challenges in inverse problem solving and addressed the correlation of nonlinear models with test data. Zhang and Guo (2007) applied the design of experiment and principal component decomposition to extract nonlinear dynamic feature for updating and validation of a frame structure with nonlinear thin-walled component. Silva et al. (2009) presented a detailed comparative study of nonlinear model updating approaches, such as harmonic balance method, constitutive equation error, restoring force surface, and proper orthogonal decomposition. Song et al. (2009) further updated a nonlinear FE model of a reinforced concrete structure under low excitation. Recently, the second-order orthogonal Wiener kernel was introduced to update nonlinear structures (Silva, 2011). Shahidi and Pakzad (2013) further presented a procedure based on RS to update nonlinear FE models in the time domain. More recently, Asgarieh et al. (2014) proposed a novel method for nonlinear FE model updating of a frame with Bouc–Wen hysteresis model based on the time-varying modal parameters (which were estimated using the deterministic–stochastic subspace identification method). Both numerical and experimental applications showed the effectiveness and high accuracy of this method. Wang et al. (2015) established a new objective function based on the instantaneous frequencies and amplitudes for nonlinear structural model updating.
Since the nonlinear behaviors of structures are mainly caused by local nonlinearities (such as gaps, friction, and joints), researchers further studied local nonlinear model updating. Through matching simulated and measured data, Schmidt (1994) discussed FE model updating with local nonlinearities. Meyer and Link (2003) applied harmonic balance method to identify local nonlinear stiffness and damping parameters to obtain a reasonable description in the frequency domain. Iranzad and Ahmadian (2012) updated a bolted joint which was modeled by a thin layer with elastic–plastic material. Davoodi et al. (2012) determined the nonlinear behavior of a ball joint system using static deflections and genetic algorithm. Alamdari et al. (2013) adopted Richard–Abbot elastic–plastic material to describe the nonlinear joint interface, and the four material parameters were used for model updating based on structural frequency response function. Lei et al. (2014) presented a two-step Kalman filter approach for the damage detection of frame structures with joint damage under earthquake excitation using partial measurements of structural acceleration responses.
For many structures, the nonlinear behavior of the structure under extreme loads can be described by the nonlinear hysteresis loops. The area of a hysteresis loop equals the energy dissipation in a cycle. Both typical nonlinear stiffness and nonlinear damping systems can be included in the hysteresis systems. Therefore, in order to update the nonlinear model, it is suggested to update the hysteresis parameters of nonlinear structures, whose nonlinearities are simulated by defining hysteresis models. For instance, Ebrahimian et al. (2015) combined the advanced mechanics-based nonlinear structural FE models and the maximum likelihood estimation method to estimate time-invariant parameters of the nonlinear hysteretic material constitutive models. With excitation decomposition algorithm, Ding et al. (2015) proposed an improved unscented Kalman filter to identify the structural parameters and coefficients of the orthogonal decomposition. Based on these studies, the overall process of nonlinear model updating may include (1) using suitable nonlinear hysteresis model to simulate the actual structure, (2) establishing objective function according to nonlinear characteristics, and (3) minimizing objective function with optimization algorithm to update nonlinear hysteresis parameters.
In this article, a new nonlinear joint model updating method for strong column-weak beam type frame structures with hysteresis models is proposed based on the instantaneous characteristics of the principal response components. Since the nonlinear response is combined with several mono-components with time-varying frequency and amplitude, and the original principal components can be reconstructed by the instantaneous frequency and amplitude, these two instantaneous parameters are used for objective function creation. Combining the analytical mode decomposition (AMD) proposed by Chen and Wang (2012), Wang et al. (2013), and Wang and Chen (2013) and Hilbert transform, the instantaneous frequencies and amplitudes of the principal response components are first extracted. Then, limited point values of the extracted instantaneous frequencies and amplitudes are selected for model updating. Finally, the objective function based on the residuals of instantaneous frequencies and amplitudes between experimental structure and FE model is established using the RS method. The objective function is then minimized using simulated annealing algorithm (Dekkers and Aarts, 1991; Kirkpatrick, 1984), and the optimal values of the nonlinear joint model parameters are obtained. To validate the effectiveness of the proposed method, a three-story frame with bilinear moment–rotation relationship at the beam-column joints under an earthquake is simulated as a numerical example. The accuracy of the proposed nonlinear model updating procedure is quantified using the defined error indices. The effects of the selected data point number and the weight factors in the objective function are also studied in the article.
Theoretical background
Instantaneous characteristics extraction
The nonlinear characteristics of a nonlinear structure are implied in the responses during the oscillation. However, it is difficult to directly use the responses to create an objective function for nonlinear structural model updating. Since the response of a nonlinear structure is combined with several mono-components, which can be reconstructed by their instantaneous frequencies and amplitudes, therefore, the instantaneous frequencies and amplitudes of the principal response components can be selected to represent the nonlinear characteristics of the structure.
To conduct the nonlinear joint model updating, the principal components are first extracted from the nonlinear vibration response by AMD. Then, the characteristics such as instantaneous frequencies and amplitudes of the principal components are obtained by constructing analytical signal with Hilbert transform. The analytical signal

Since the instantaneous frequency and the amplitudes of the acceleration and displacement both slowly vary with time, thus, in this article, the instantaneous amplitude
RS methodology
The traditional model updating methods have several drawbacks such as requirement of sensitivity calculations and cannot be used for nonlinear FE model updating (Zhang and Guo, 2007). Thus, in this article, the RS methodology is introduced to achieve the global approximations of the structural responses.
One of the important steps involved in RS-based method is the choice of RS form to express structural response features, which may have a great impact on the results of the analysis. The choice of RS models may depend on the type of application. For the FE model updating in structural dynamics, since polynomial model has shown attractive potential due to its simple calculation and closed-form algebraic type (Ren and Chen, 2010), a quadratic polynomial RS is used as
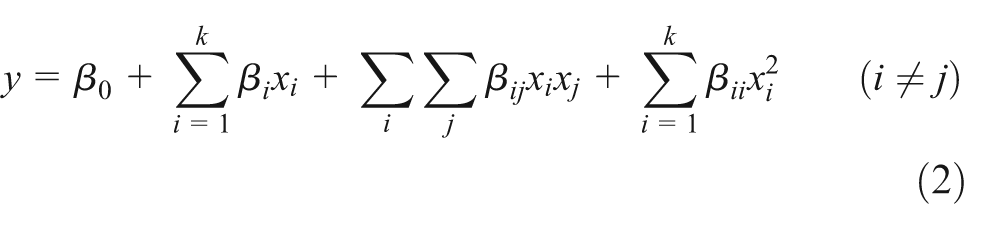
where
In order to economize computational efforts, the uniform design proposed by Fang (1980) and Wang and Fang (1981) to effectively solve the experimental problems with multiple parameters and levels is used to construct the RS models for the replacement of the original FE model. Several points are sampled in the RS domain based on the number of factors and the uniform design tables. Then, all the responses of design points are computed by FE analysis and corresponding instantaneous characteristics are extracted for constructing RS models with least-square estimation techniques. To update the nonlinear structural model through time history of the measured responses, a polynomial RS model is constructed to represent the results of FE model at every selected data point along the time series.
In this article, the accuracy of the regressed surface at every selected data point is verified based on the residuals of the RS and FE models. The overall adequacy of the RS models is evaluated by the R2 criterion and root mean squared error (RMSE) criterion

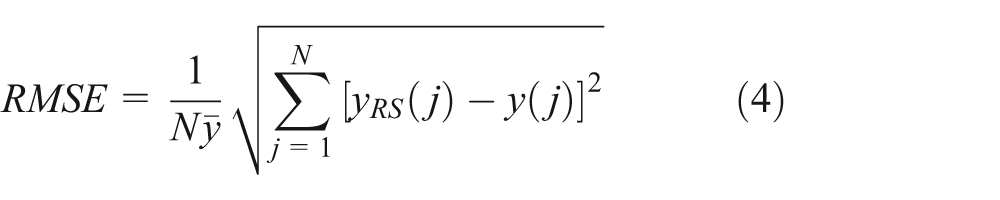
where
Parameter optimization
As discussed in section “Instantaneous characteristics extraction,” the slow-varying portion of the instantaneous frequency




in which
To consider the significance of maximum displacement and acceleration responses from the design point of view, the residuals of acceleration and displacement responses with unequal weight factors are defined and added into the objective function as follows
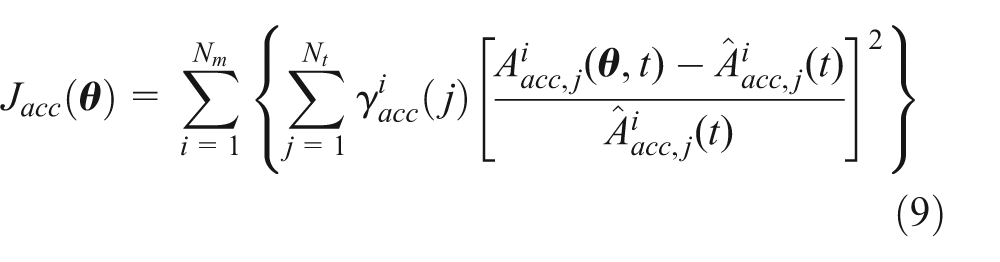
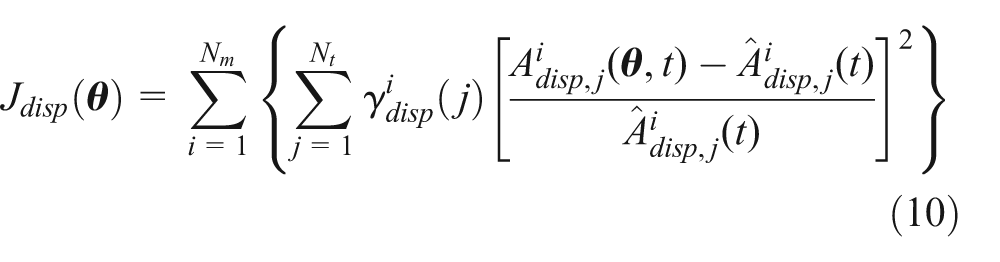

where
After parameterized, the nonlinear model updating problem turns into an optimization problem of structural parameters. In this article, the simulated annealing global optimization algorithm in MATLAB is used for minimizing the objective function



in which,
During the updating process, different stages involved in the method are gone through by the use of the prepared program. The overall steps of the nonlinear joint model updating process are shown in Figure 1.
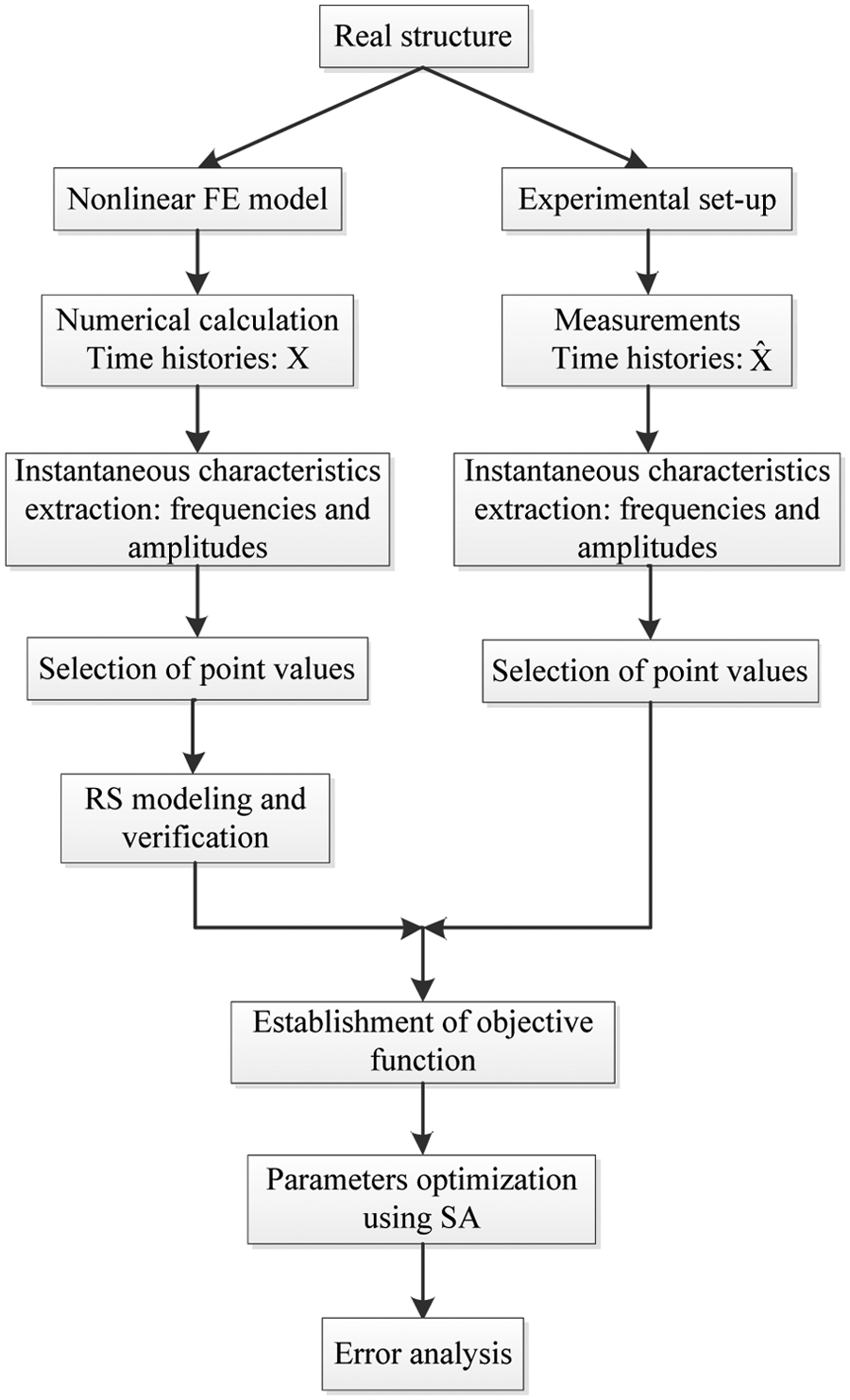
Overall stages of the nonlinear joint model updating process.
Numerical verification
Model description and dynamic analysis
In order to verify the feasibility of the method described above, a strong column-weak beam type two-dimensional three-story nonlinear frame is simulated. The bilinear moment–rotation relationship is used to simulate the local nonlinearities. The structure illustrated in Figure 2 is composed of beams and columns with cross-section dimensions of 0.25 m × 0.3 mand 0.3 m × 0.3 m, respectively. The span is 6 m and the total height is 12 m. The bottom ends of the columns are fixed. The nonlinear model is simulated using the FE analysis software ANSYS (DeSalvo and Swanson, 1989). Beam3 element is used to simulate the beams and columns, while Combin40 element is introduced to simulate the bilinear moment–rotation relationship at the beam-column joints. Material model behavior of beams and columns is elastic, and Young’s modulus, density, and Poisson’s ratio are 30 GPa, 2500 kg/m3, and 0.3, respectively. Initial values of bilinear hysteretic parameters are selected as: stiffness before yielding K1 = 6.867 × 106 kN m, stiffness after yielding K2 = 8.134 × 104 kN m, and yielding rotation X = 3.406 mrad.
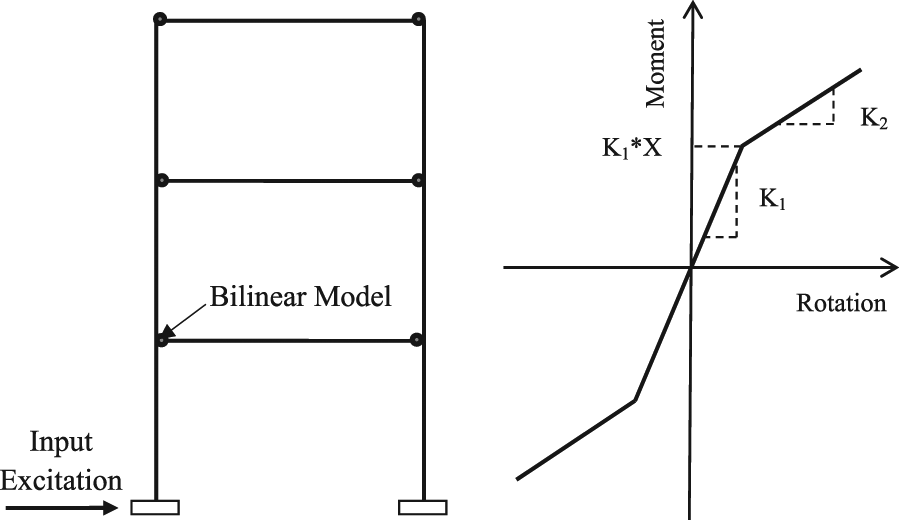
Three-story nonlinear finite element model and bilinear model.
In the study, the El-Centro earthquake shown in Figure 3 is selected as an external excitation and the structural damping ratio is assigned as 5%. The simulated acceleration and displacement responses with a sampling frequency of 200 Hz at the second floor are assumed as measured responses (Figure 4). The Fourier spectra of the acceleration response and the nonlinear moment–rotation loops are illustrated in Figure 5(a) and (b), respectively.
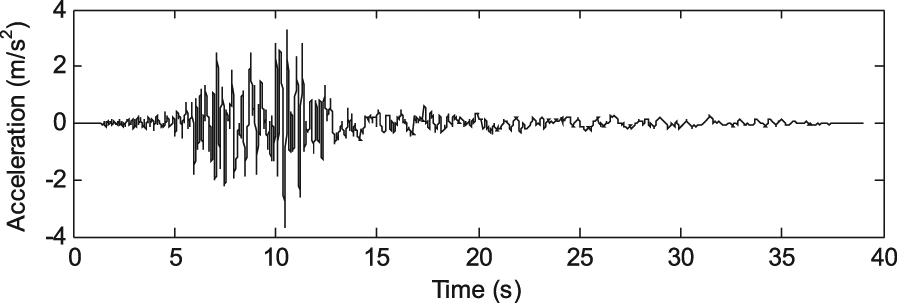
Acceleration record of El-Centro earthquake.

Acceleration response of the second floor.

(a) The Fourier spectrum of the measured acceleration and (b) the nonlinear moment–rotation hysteretic loops.
Nonlinear joint model updating
In this section, the three parameters of the bilinear moment–rotation relationship at the beam-column joints are selected as model parameters to be updated. Based on the previous studies and experiences, 20% is set to the parameter bounds. The uniform design method in design of experiments is then used to determine the sampling points. A total of 25 runs of experiments are carried out. Dynamic responses of different parameter levels under El-Centro earthquake are calculated, and the time history response data of the node at the middle of the second floor are used to extract the instantaneous frequencies and amplitudes of the principal components combined with AMD and Hilbert transform.
Since the slow-varying portion of the instantaneous frequency and the instantaneous amplitudes of the nonlinear structural responses vary slowly over time compared with the oscillation of the acceleration and displacement, there is no need to select all the measured time points to calculate instantaneous parameter residuals included in the objective function. The objective function can be created using limited point values along the time series of the response and a reasonable estimated result may be obtained. However, the selection of point values and the number of data points required are the critical issues that should be focused on when creating the objective function. So, in order to discuss the effect of selected data points, total five cases are considered here for this special example:
Case 1: 10 data points are equally selected from the response time series.
Case 2: 15 data points are equally selected from the response time series.
Case 3: 20 data points are equally selected from the response time series.
Case 4: 25 data points are equally selected from the response time series.
Case 5: In this case, considering the importance of local maximum, the time series of the instantaneous characteristics are equally divided into 20 intervals. Then, the location of the peak value in each interval is selected as the selected data point location.
The 20 selected local peak values of acceleration amplitude, displacement amplitude, and the instantaneous frequency of the measured (original) responses (Case 5) are presented in Figure 6(a) to (c).
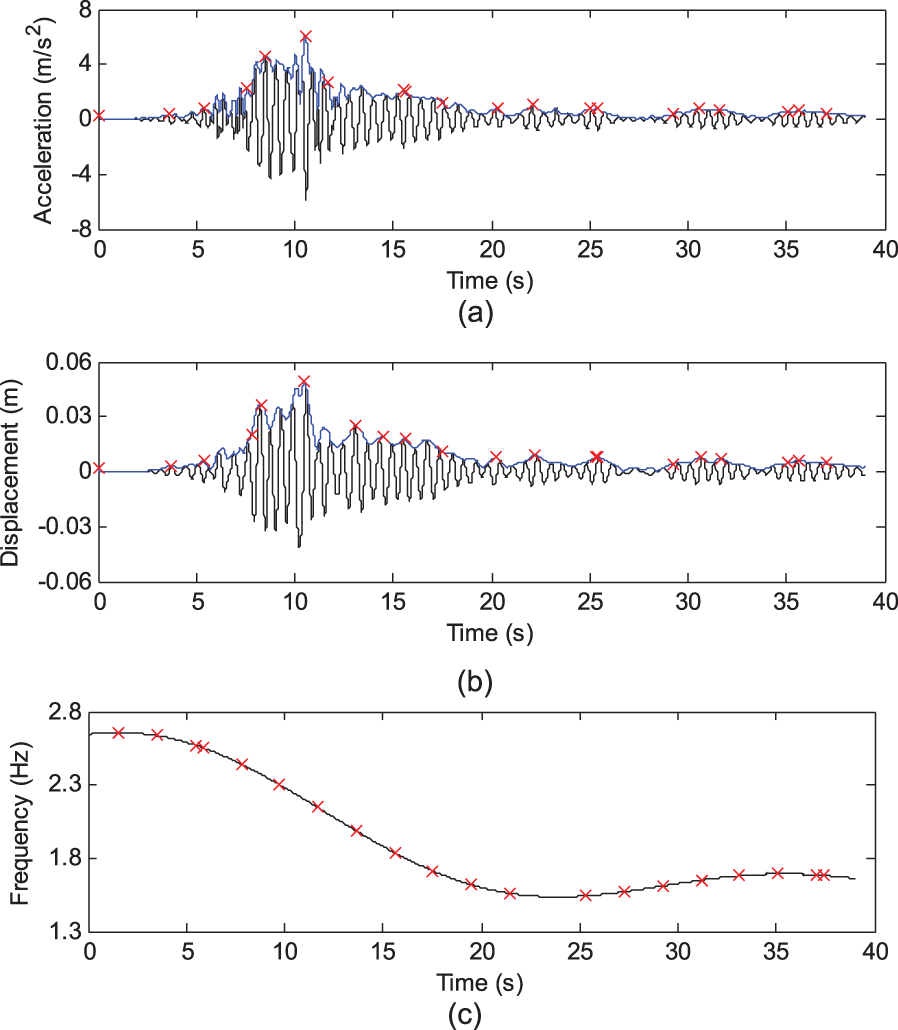
Selected data points of the dominant mono-component: (a) instantaneous amplitude of the acceleration, (b) instantaneous amplitude of the displacement, and (c) instantaneous frequency of the acceleration (Case 5).
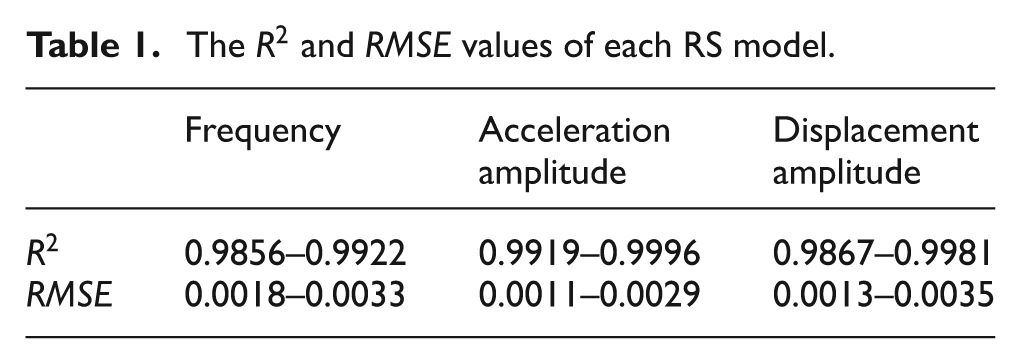
After selecting the data points of instantaneous characteristics, a RS model is constructed at every selected data point to replace the FE model. To check the accuracy of the regressed surface, the
The
Then, the FE model is replaced by the regressed quadratic polynomial and the corresponding objective function is created for the nonlinear joint model updating. The hysteresis parameters are finally obtained by minimizing the objective function using simulated annealing algorithm.
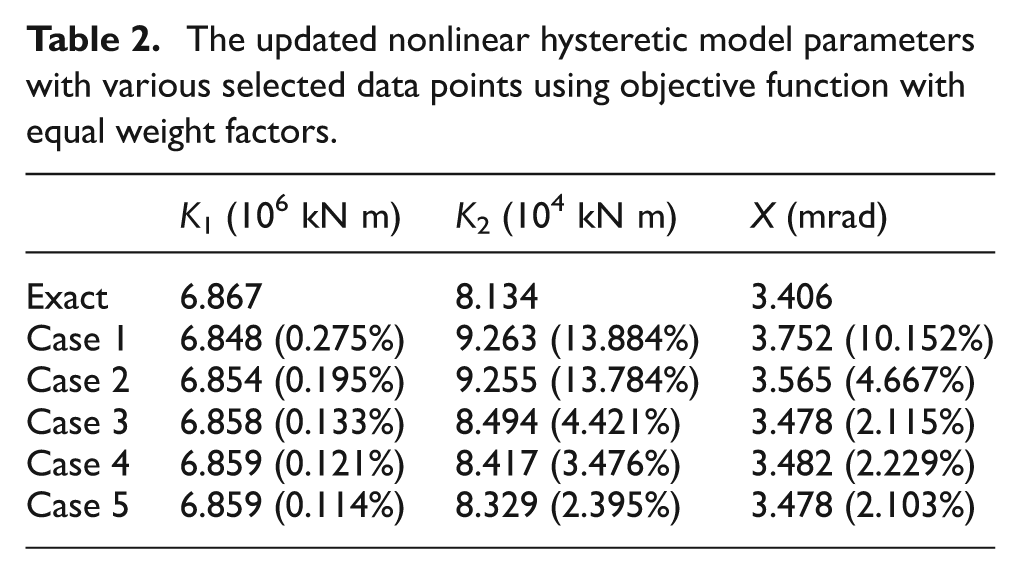
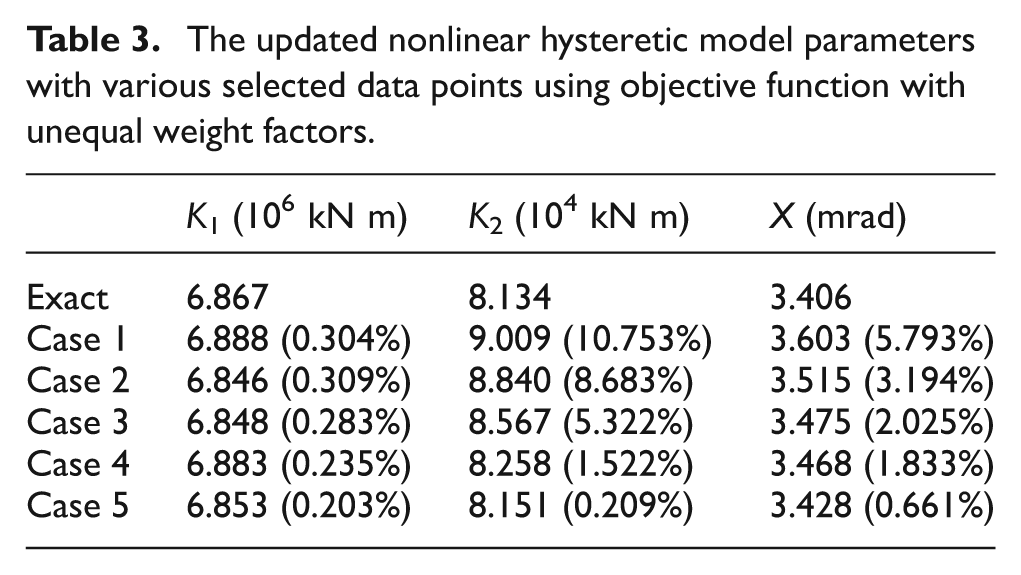
These updated three hysteresis parameters for the above five cases using objective function with equal/unequal weight factors are presented in Tables 2 and 3, respectively, and the corresponding error indices are shown in Tables 4 and 5. From Tables 2 and 3, it can be observed that the nonlinear hysteresis model parameters can be effectively obtained with high accuracy based on the proposed model updating method.
The updated nonlinear hysteretic model parameters with various selected data points using objective function with equal weight factors.
The updated nonlinear hysteretic model parameters with various selected data points using objective function with unequal weight factors.
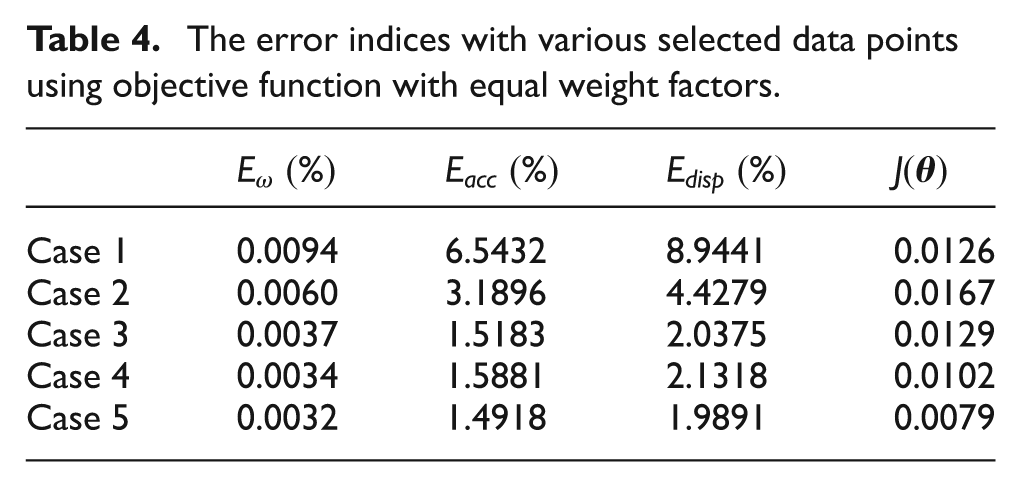
The error indices with various selected data points using objective function with equal weight factors.
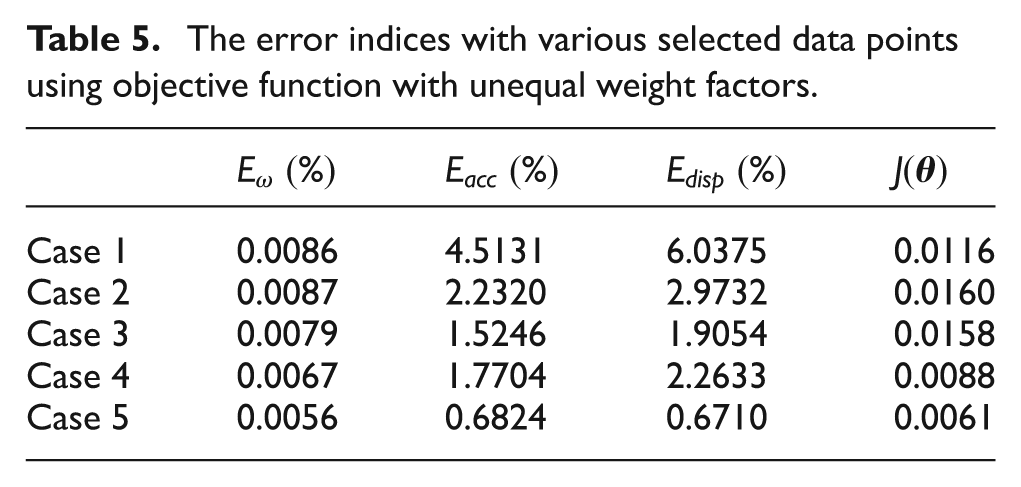
The error indices with various selected data points using objective function with unequal weight factors.
For these cases with equal weight factors, it can be further seen from Figure 7 that all the three indices are smaller than 5% in Cases 3–5 where the numbers of selected data points are not less than 15. With the increase in the number of data points, the defined three error indices show a reducing tendency. However, this reducing trend is not significantly obvious when 20 or more data points are selected. So, for this simulation, 20 data points are enough for calculating instantaneous parameter residuals. Additionally, compared with Case 3, the error indices of Case 5 which shares the same data point number while the distribution is inconsistent are smaller. The updated three parameters of Case 5 are closer to the real values than those of Case 3 (Table 2). This indicates that the local peak values in the uniformly distributed intervals are more representative and reasonable.
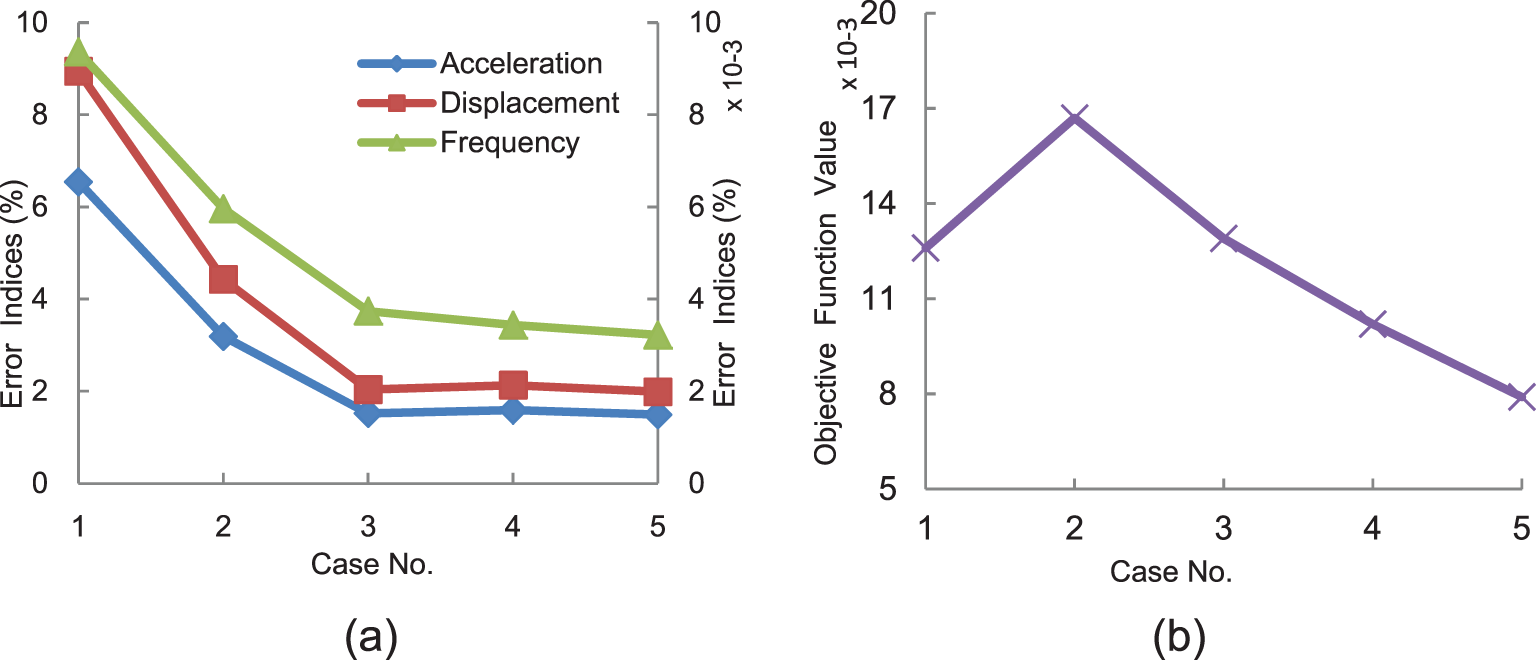
The error indices and objective function values of different cases with equal weight factors: (a) error indices and (b) objective function value.
As shown in Figure 8, the results of cases with unequal weight factors follow almost the same laws discussed above. To discuss the effect of weight factors, the corresponding error indices of Case 5 with unequal weight factors are listed in Table 6, from which we can find that both acceleration and displacement error indices decreased a lot while the frequency still maintained high accuracy. This is mainly caused by the adjustment of weight factors in acceleration and displacement objective functions considering the importance of the maximum displacement and acceleration responses.
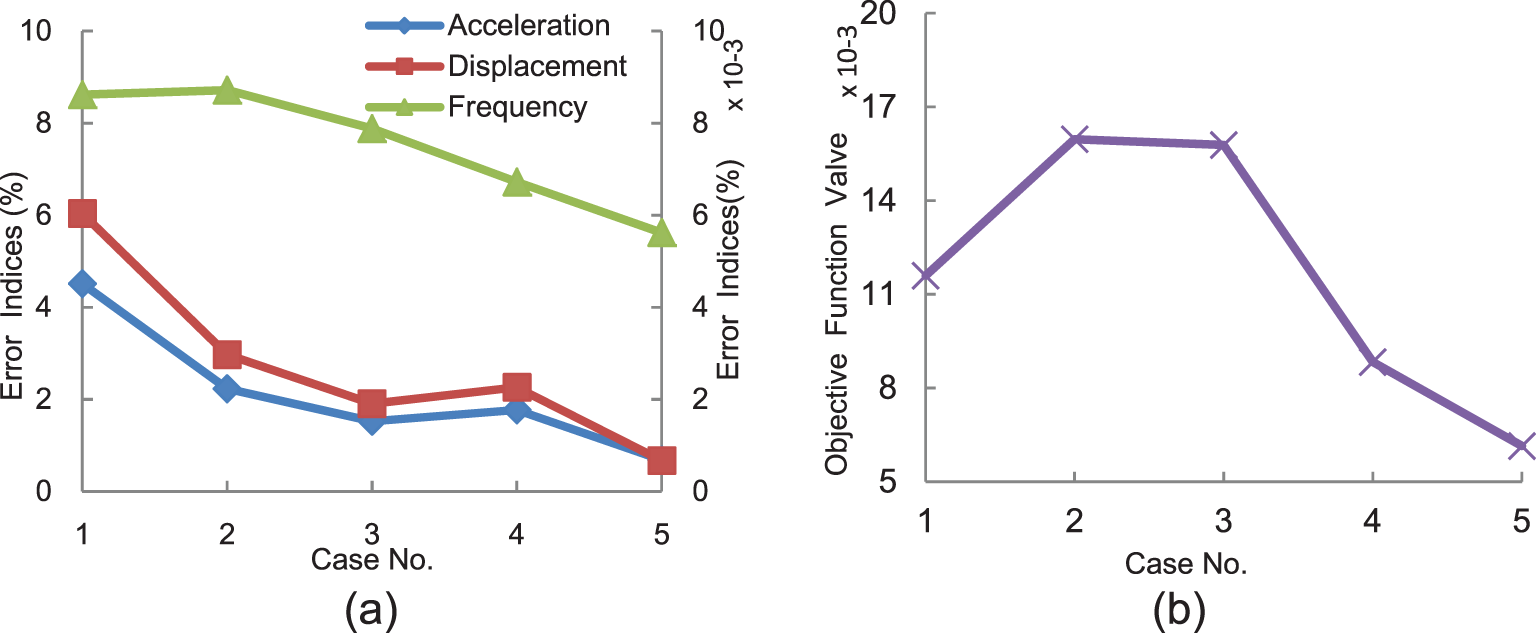
The error indices and objective function values of different cases with unequal weight factors: (a) error indices and (b) objective function value.
The error indices for Case 5 with equal/unequal weight factors.

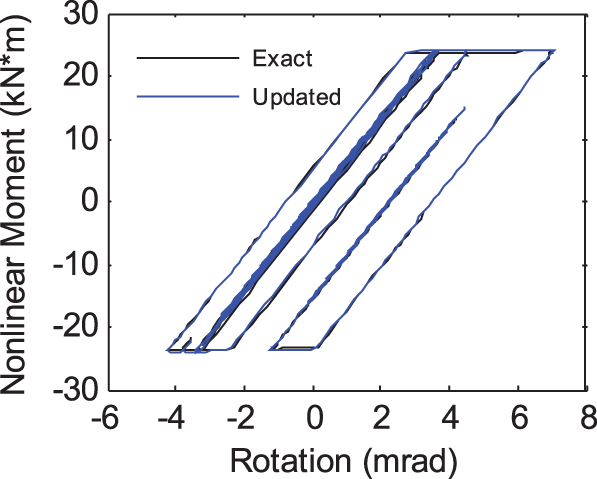
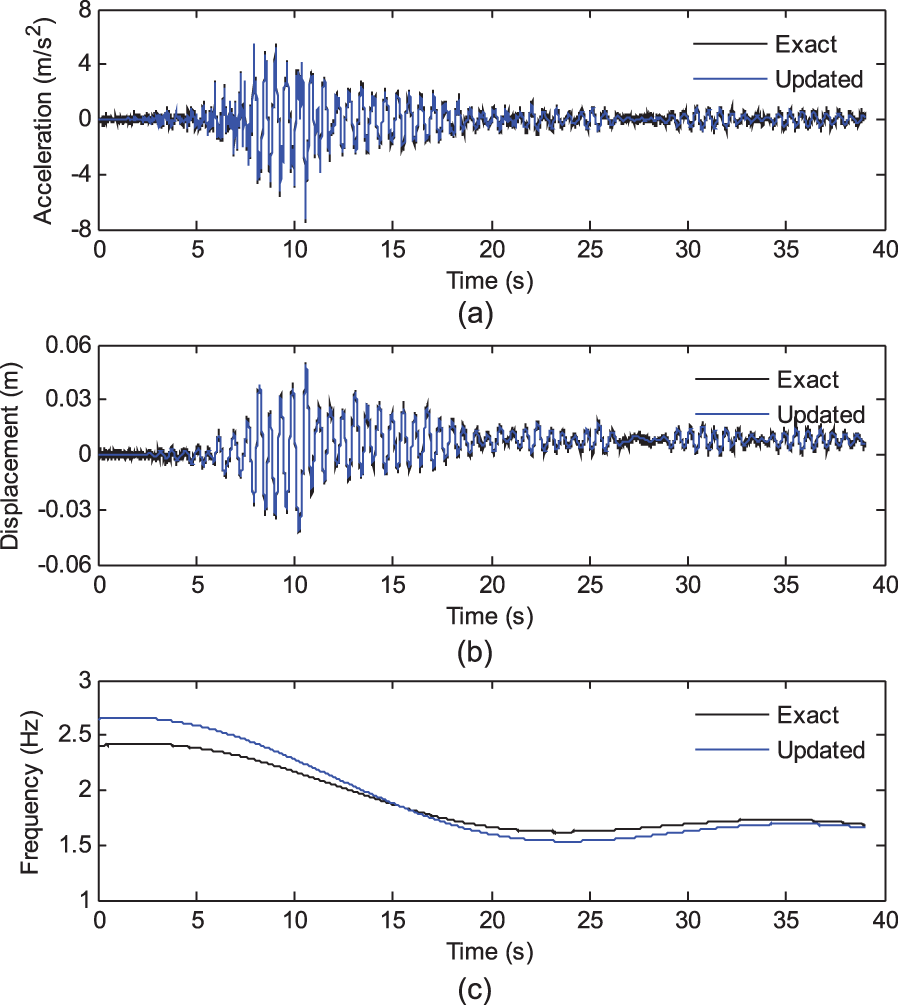
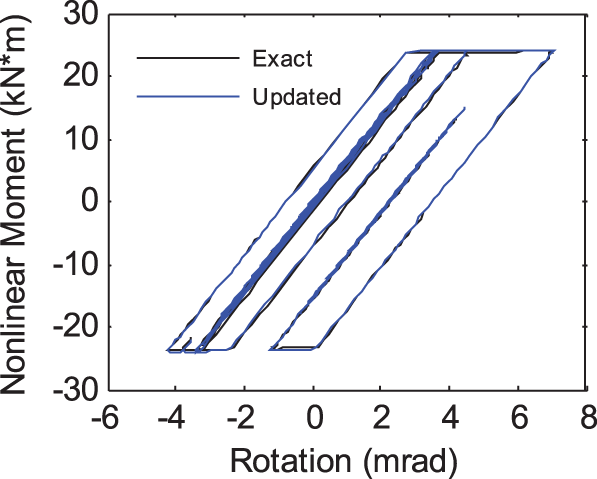
Therefore, in this article, 20 data points selected at local peaks of the instantaneous characteristics are finally applied for the nonlinear structural model updating using objective functions with unequal weight factors. The comparisons between the updated acceleration responses, displacement responses, and instantaneous frequency and the real values are presented in Figure 9(a) to (c). Also, the nonlinear moment–rotation curve of the updated model is compared with that from baseline model in Figure 10. It can be seen from Figures 9 and 10 that the proposed method can effectively update the nonlinear joint model.
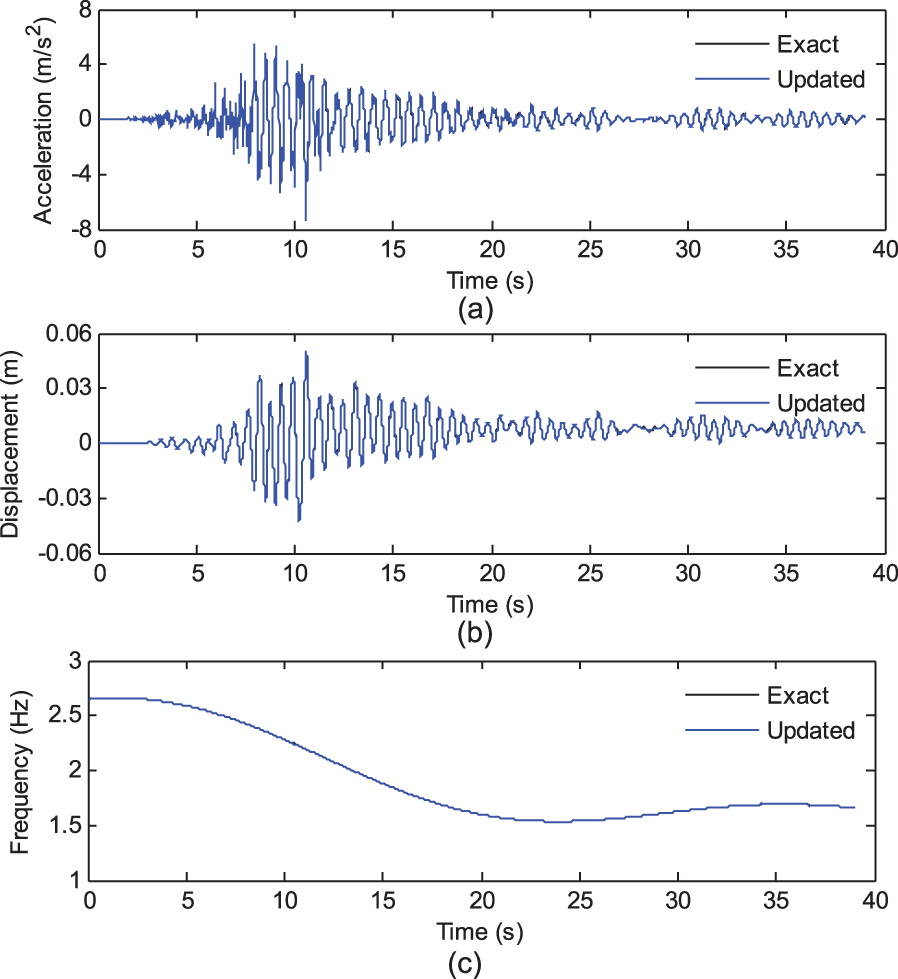
The comparisons between the updated results and the real values without noise: (a) acceleration responses, (b) displacement responses, and (c) frequency.
The comparisons of nonlinear moment–rotation hysteretic loops without noise.
Noise effect
To further investigate the robustness of the nonlinear joint model updating framework and its sensitivity to the output measurement noise, 5% and 10% noise-to-signal ratio (NSR) Gaussian white noises are added into the simulated acceleration and displacement as the measured responses, respectively. Again, the method proposed above is carried out to update the nonlinear joint model.
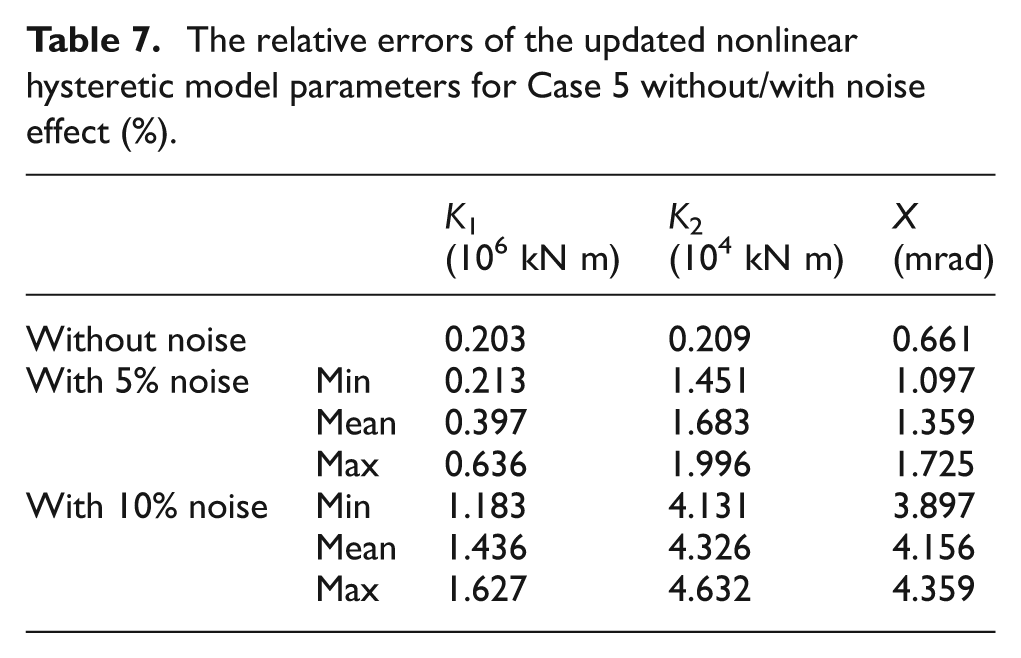
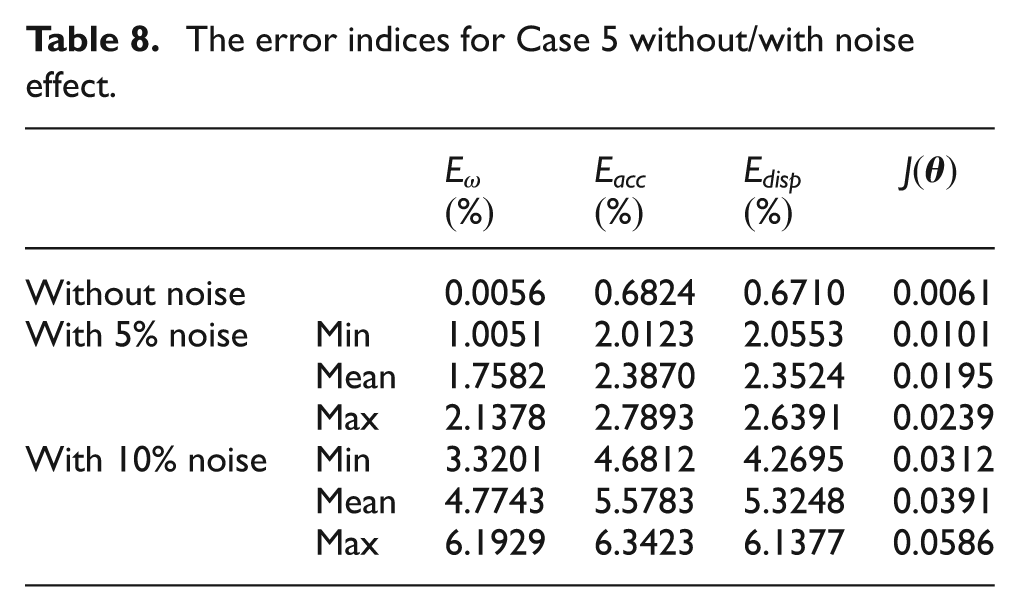
Considering the conclusions drawn from the cases without noise, the three hysteresis parameters K1, K2, and X are again updated based on the proposed method with 20 selected local peak values and unequal weight factors. Due to the randomness nature of noise, 100 runs are conducted for different noise levels, respectively. The statistical properties of the updated nonlinear parameters’ relative errors are presented in Table 7, and the corresponding error indices are presented in Table 8. The comparisons between the updated acceleration responses, displacement responses, instantaneous frequency, and the real values during a run are shown in Figures 11 and 13. Also, the corresponding nonlinear moment–rotation curve of the updated model is compared with that from baseline model in Figures 12 and 14.
The relative errors of the updated nonlinear hysteretic model parameters for Case 5 without/with noise effect (%).
The error indices for Case 5 without/with noise effect.
The comparisons between the updated results (during a run) and the real values with 5% noise: (a) acceleration responses, (b) displacement responses, and (c) frequency.
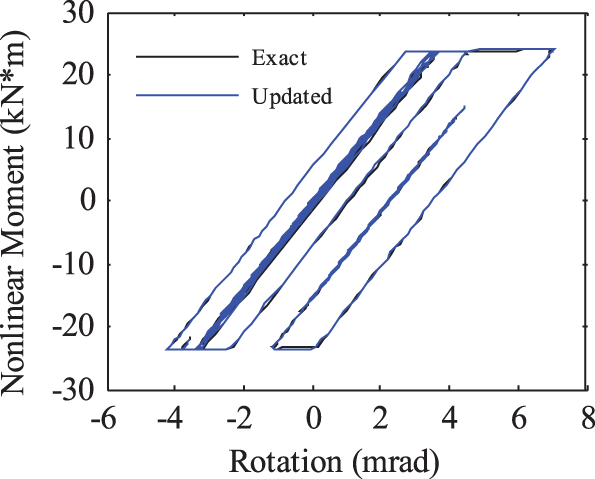
The comparison of nonlinear moment–rotation hysteretic loops with 5% noise (during a run).
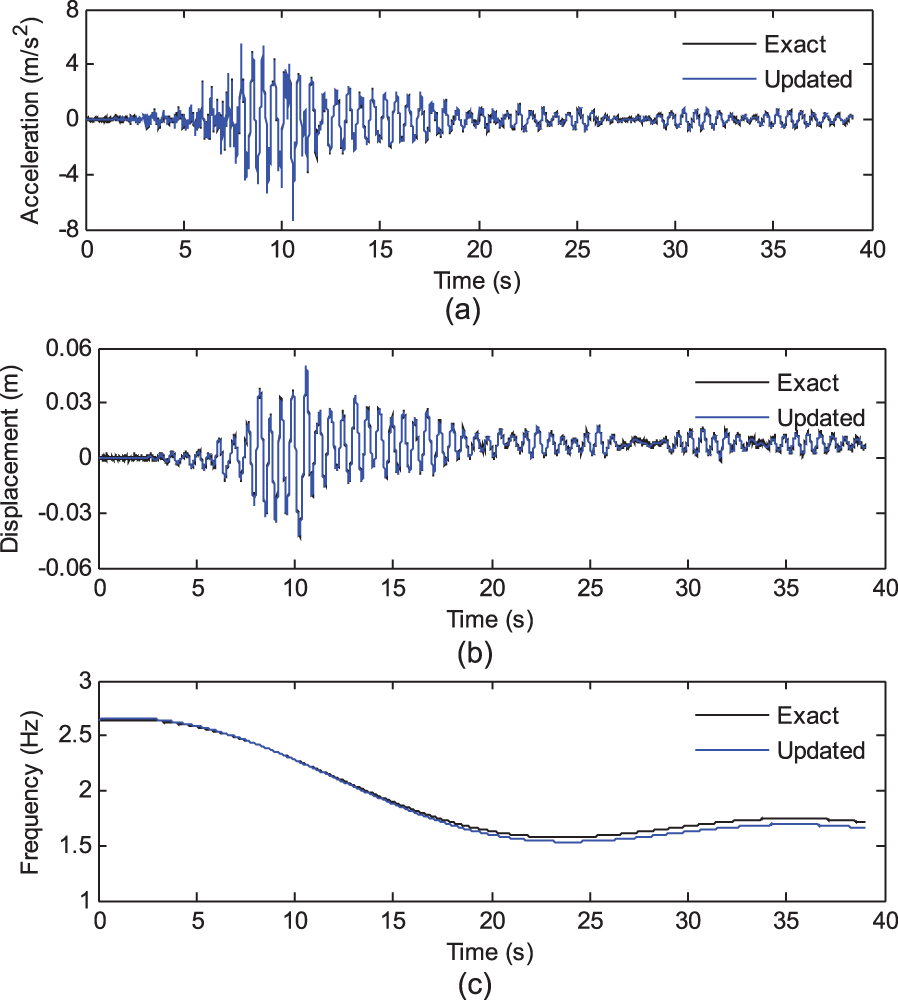
It can be observed from Tables 7 and 8 that, for the case with 5% noise, the relative errors of the updated nonlinear hysteretic model parameters (100 runs) are less than 2% and the error indices of frequency, acceleration, and displacement are also less than 3%. When the noise level increases to 10%, the maximum of the error indices is about 6.34% and the mean is less than 5.58%. Figures 11 to 14 show the highly exact fitness between the updated acceleration responses, displacement responses, instantaneous frequency, and the real values. All of these obtained results reveal the high accuracy and robustness of the proposed method.
The comparisons between the updated results (during a run) and the real values with 10% noise: (a) acceleration responses, (b) displacement responses, and (c) frequency.
The comparison of nonlinear moment–rotation hysteretic loops with 10% noise (during a run).
Conclusion
This article presents a new nonlinear joint model updating method based on instantaneous frequencies and amplitudes of principal dynamic response components under earthquake excitations. A reasonable objective function based on the residuals of instantaneous frequency and amplitude between experimental structure and FE model is created for nonlinear model updating. The values of the hysteresis parameters are then obtained by minimizing the objective function using simulated annealing algorithm. The effects of the selected data point number, the weight factors in the objective function, and noise effect are also discussed thoroughly. The proposed procedure is validated by the simulation of a three-story frame with bilinear moment–rotation relationship at the beam-column joints. The optimization performs well in the numerical case study. Based on the numerical results, it can be concluded that
The proposed method can effectively update the nonlinear model with high accuracy for numerical simulations. A low level noise has a little effect on the proposed nonlinear joint model updating method.
Limited point values of the instantaneous frequencies and amplitudes can be selected to represent the nonlinear characteristics of the structure and the RS model can be applied to replace the nonlinear FE model.
The created objective function with proposed weight factors and the point values selected method are practical for nonlinear joint model updating.
For real application, the nonlinear structures may perform more complex nonlinear behaviors; thus, the selection of suitable nonlinear models to describe the structural nonlinear behaviors should be further studied.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Financial support to complete this study was provided, in part, by the National Natural Science Foundation of China under grant nos 51578206 and 51278163, by “The Fundamental Research Funds for the Central Universities”, and by the Natural Science Funds for Distinguished Young Scholar of Anhui Province under grant no. 1708085J06. The results and opinions expressed in this paper are those of the authors only and they do not necessarily represent those of the sponsors.