
Abstract
Rolling base isolation system provides effective isolation to the structures from seismic base excitations by virtue of its low frictional resistance. Herein, dynamic analysis of flexible-shear type multi-storey building mounted on orthogonally placed elliptical rolling rod base isolation systems subjected to bi-directional components of near-fault earthquake ground motions is presented. The orthogonally placed rods would make it possible to resist the earthquake forces induced in the structure in both the horizontal directions. The curved surface of these elliptical rods has a self-restoring capability due to which the magnitude of peak isolator displacement and residual displacement is reduced. The roughness of the tempered curved surface of the rollers dissipates energy in motion due to frictional damping. The seismic performance of the multi-storey building mounted on the elliptical rolling rod base isolation system is compared with that mounted on the sliding pure-friction and cylindrical rolling rod systems. Parametric studies are conducted to examine the behavior of the building for different superstructure flexibilities, eccentricities of the elliptical rod, and coefficients of friction. It is concluded that the elliptical rolling rod base isolation system is effective in mitigation of damaging effects of the near-fault earthquake ground motions in the multi-storey buildings. Even under the near-fault earthquake ground motions, the base-isolated building mounted on the elliptical rolling rods shows considerable reduction in seismic response. The isolator displacement with the elliptical rolling rod base isolation system is less in comparison to the pure-friction and cylindrical rolling rod systems.
Introduction
The technology of seismic isolation has been used from four decades to protect engineering structures from seismic hazard. Presently, there are thousands of base-isolated structures like buildings, bridges, liquid storage tanks, and so on constructed across the world and has resisted the real-time earthquakes and hence proven the effectiveness of the seismic base isolation systems. The base isolation systems introduced in structures reduce the economic losses caused due to damage of valuable structures during seismic hazards apart from saving human lives. The main objective of isolation system is to completely decouple the structure from earthquake base excitations. For the purpose of seismic isolation, elastomeric and sliding bearings are commonly used, whereas rolling isolation systems are relatively new. In all types of sliding systems, the performance of the system depends on the value of coefficient of friction, velocity at the friction interface, and the intensity of earthquake.
Several attempts have been made by the researchers to use low value of coefficient of friction to make the isolation systems effective under all intensities of earthquake, however consequently with unduly larger isolation level displacements. Alternatively, a third type of isolation system was introduced called rolling system, based on the concept of rolling friction. When one body rolls over the surface of another body, the resistance mobilized at the interface to the motion is called rolling friction. The rolling friction is typically lower than the sliding friction. Rolling base isolation system provides effective isolation to the structures from seismic base excitations by virtue of its low frictional resistance. These isolation systems can completely decouple the structures from the seismic forces and hence reduce the seismic demand on structures. Bridge bearings and many mechanical bearings used in industries are based on this concept where balls are used as rolling device.
Lin and Hone (1993) proposed two sets of orthogonally placed circular free rolling rods under the basement and found them effective in reducing the response of the structure, but it resulted in an uncontrolled residual displacement of base mass. The use of various jacks can restore the structure back to its original position after earthquake excitation. Lin et al. (1995) further carried out experimental and analytical works on single-degree-of-freedom (SDOF) system using rolling rod system and found it effective with a re-centering force device help in reducing the residual isolator displacement. Jangid (1995) used orthogonally placed free circular rolling rods without any restoring force and found them effective in reducing the response of the structure as compared to the fixed-base structure. These rolling rods were considered without any restoring force, resulted into more peak and residual isolator displacements. Muhr et al. (1997) used isolation system consisting of steel balls rolling on rubber tracks. The isolation system was effective in reducing the seismic response of the structures and further the experimental studies were also carried out by Guerreiro et al. (2007) later on to assess the rolling-ball isolation system.
Londhe and Jangid (1998, 1999) used elliptical rolling rods (ERRs) for a multi-storey building which overcame large peak and residual isolator displacements caused due to the circular shape of the rods and found them effective in reducing seismic responses. Zhou et al. (1998) combined the advantage of free rolling rod isolators and friction pendulum system (FPS), in which the steel balls were placed in between the two concave surfaces, at the superstructure and the foundation interface. The numerical integration and harmonic balance methods were used for obtaining analytical solution in evaluating the dynamic response. Shake table test was also conducted on a three-storey masonry model for studying the effective performance of the ball system with restoring property. It was concluded that seismic response of the structure is reduced considerably as compared to the fixed-base structure. Jangid (2000) further carried out a stochastic study on the circular rolling rods placed orthogonally along with re-centering device in the form of a spring or cantilever beam, for a flexible-shear type multi-storied building subjected to non-stationary earthquake excitations. It was concluded that the rolling rods with re-centering device are quite effective in reducing seismic response of the structure. Kaplan and Seireg (2001) used steel balls in concave surfaces with a spring-cam system. It was found that response of the structure was reduced by providing the cams, which gets compressed the spring under normal conditions and released when an earthquake excitation was sensed. Calio et al. (2003) studied frequency domain behavior of the FPS with ball system having restoring property for the use in multi-storey buildings. Lee and Liang (2003) studied sloped rolling-type bearing (RTB), which utilizes the concept of a steel cylinder rolling on a V-shaped surface. Butterworth (2006) proposed a rolling isolation system consisting of rollers with non-concentric spherical upper and lower surfaces.
Tsai et al. (2006, 2007) have also used the RTB isolators in seismic isolation tests of a bridge model on shaking table, to investigate the seismic behavior of a scaled bridge model isolated by the RTBs. The test results showed the effective performance of the sloped RTB for seismic isolation of bridges. Chung et al. (2009) proposed an eccentric nonlinear rolling isolator which overcame the drawbacks of the resonance and large displacement response of the linear isolator having fixed vibration frequency when located near a fault. Kesti et al. (2010) carried out experimental work on ball-n-cone (BNC) bearing, consisting of a ball placed in between the two conical plates resulting in isolation of the structure. Ismail et al. (2010) developed a roll-n-cage (RNC) isolator; the performance analysis of this isolator was verified for wide range of structures and ground motion excitations. Ou et al. (2010) proposed roller seismic isolation bearings for highway bridges. Yang et al. (2012) proposed eccentric rolling isolation system (ERIS) considering friction damping for energy dissipation. The performance of the ERIS was found effective in reducing the response as compared to the linear isolation system. Hosseini and Soroor (2011, 2013) proposed a system called orthogonal pairs of rollers on concave beds (OPRCB) for low and medium rise buildings. Harvey and Gavin (2013) proposed the model of a rolling isolation platform generally used for protecting the objects from the hazards of horizontal excitations. Harvey et al. (2014) and Harvey and Gavin (2015) studied the performances of lightly and heavily damped rolling isolation systems (RISs) located within earthquake-excited structures analytically and experimentally. Yet, hardly any works reported in the literature wherein the seismic response of the base-isolated buildings with the rolling systems under near-fault ground motions are studied when subjected to bi-directional components of earthquake ground motions. Wei et al. (2016a, 2016b, 2017) studied the isolation performance of a spring-rolling isolation system by considering that the rolling friction force gradually and linearly increases with the relative displacement between the isolator and the ground.
Near-fault earthquake ground motions such as Parkfield 1966, San Fernando 1971, Landers 1992, Northridge 1994, Kobe 1995, and Chi-Chi 1999 have caused huge damages to various civil structures. This has motivated the seismological and engineering communities to study the effect of the near-fault earthquakes on civil structures. The strong earthquake ground motions in the immediate vicinity of a fault are frequently characterized by an intense velocity pulse. Also, these pulses transfer large amount of energy in the structures in its near vicinity. The forward directivity and/or permanent tectonic translation are the two primary characteristics of the near-fault ground motions. These characteristics make the near-fault earthquakes distinctive as compared to the far-fault ground motions. From the previous records of the near-fault ground motions, it was demonstrated that the kinematic characteristics contain large displacement pulses, say about one or two pulses from 0.5 m to more than 1.5 m with peak velocity of 0.5 m/s or greater. Their time period is usually in the range of 1–3 s; however, it can be as long as 6 s and such variation can be observed in acceleration history as well. Such different pulses do not exist in the seismic ground motions recorded at locations away from the near-fault region. When a near-fault ground motion time history is used for the seismic analysis of a structure at a particular site, the strike normal and parallel components need to be oriented with respect to the strike of the fault that dominates the seismic hazard of that site. Long-period flexible structures such as the base-isolated structures are required to be studied under the near-fault earthquakes to assess the effectiveness of the passive control system.
There have been several studies conducted for understanding the seismic behavior of both base-isolated and fixed-base structures under near-fault motion (Hall et al., 1995; Jangid and Kelly, 2001; Makris, 1997; Malhotra, 1999; Rao and Jangid, 2001). Matsagar and Jangid (2003) studied the seismic response of base-isolated structures during impact under near-fault earthquakes. Sahasrabudhe and Nagarajaiah (2005) experimentally investigated base-isolated building with sliding bearing along with magneto-rheological dampers subjected to near-fault earthquakes. It was concluded that additional dampers help in reducing the isolator displacement; however, it increases the base shear and storey drift in the buildings. Jangid (2005) investigated the optimum parameters of FPS used in multi-storey buildings and bridges under near-fault ground motions. It was observed that for lower values of the friction coefficient, considerable sliding displacement occurs in the FPS under the near-fault motions. Jangid (2007) investigated the optimum parameters of the lead rubber bearing (LRB) used in buildings and bridges subjected to near-fault ground motions. Panchal and Jangid (2008) studied the effect of near-fault earthquakes on variable friction pendulum system (VFPS), which resulted in reduction in the base shear in the buildings without much variation in the top floor absolute acceleration response. Providakis (2009) carried out a numerical simulation for base-isolated building using the LRB and FPS in addition to the supplemented viscous dampers, in order to reduce the isolator displacement under near-fault ground motions. Saha et al. (2015) reviewed the dynamic analysis of base-isolated buildings, bridges, and cylindrical liquid storage tanks under near-fault earthquakes and concluded on retention of the effectiveness of base isolation. Fathi et al. (2015) studied the base-isolated frames along with the supplemental damping (viscous dampers) subjected to the near-fault and far-fault ground motions. It was observed that the isolator displacement decreases; however, the relative displacement and acceleration in the storeys increased for near-fault motions. Limitation on excessive isolator displacement in base-isolated building was given due to consideration by Das et al. (2015) in optimizing the isolation systems. Lately, Zelleke et al. (2015) investigated the effectiveness of the supplemental dampers in the base-isolated buildings to control large isolator displacements under earthquake excitations and observed usefulness of the hybrid control scheme for earthquake protection. Chakraborty et al. (2016) proposed in their flat sliding base isolation system effective mechanism for re-centering while limiting the peak bearing displacements. However, performance of the rolling isolation systems used in structures subjected to bi-directional components of the near-fault earthquakes requires an in-depth investigation as it has not been adequately studied thus far.
The specific objectives of the present investigation are as follows: (1) to study the performance of the flexible-shear type multi-storey building mounted on the orthogonally placed ERR base isolation systems subjected to bi-directional (normal and parallel components of) near-fault earthquake ground motions, (2) to compare the seismic response of the ERR base-isolated building with the pure-friction sliding isolation system and bi-directional cylindrical rolling rods in order to measure the effectiveness of the ERR, and (3) to investigate the influence of important parameters on the response of the buildings isolated using the ERR through a parametric study. The parameters considered in the study are the coefficient of rolling friction, eccentricity of ERR, and fundamental time period of the fixed-base building, which essentially govern the seismic response of structures.
Modeling of base-isolated building mounted on ERR
Figure 1 shows a N-storey flexible-shear type building mounted on the orthogonally placed ERR base isolation system subjected to bi-directional components (fault-normal and fault-parallel) of near-fault earthquake ground motions. The ERR base isolation system is installed between the base slab of the building (also referred to as base mass) and the foundation support of the building. A conceptual three-dimensional (3D) drawing indicating the axis of rotation for the top and bottom rollers is shown in Figure 2. The rollers have grooves to protect against sliding longitudinally. The grooves have a small size offset with same eccentricity. The major radius, coefficient of rolling friction, and eccentricity of the ERR are the three design parameters required to provide the desired isolation for the building from the near-fault earthquake ground motions. The coefficient of rolling friction is typically kept low in order to transmit minimum earthquake force into the superstructure of the building. Generally, the coefficient of rolling friction is 1/10th that of the coefficient of sliding friction for the same interacting material. The eccentricity of the ERR that provides a nonlinear restoring force defines its geometry indicating the proportion of the major and minor radii. The following assumptions are made in the dynamic analysis of the ERR base-isolated building:
The floor diaphragms of each storey of the superstructure are rigid.
Constituent material of the eccentric rollers in the ERR base isolation system is rigid, that is, rods themselves are undeformable.
Law of dry coulomb friction is valid and the coefficient of rolling friction between the ERR base mass and ERR-foundation mass is constant, that is, non-velocity dependent.
The superstructure is linear-elastic, which is typically achieved by the base isolation.
The superstructure is stable and it does not overturn during earthquake-induced shaking.
Accidental eccentricity due to mismatch in center of rigidity and center of mass at each storey level is considered zero; thus, torsional effects are neglected.
Vertical component of earthquake ground motion is ignored.
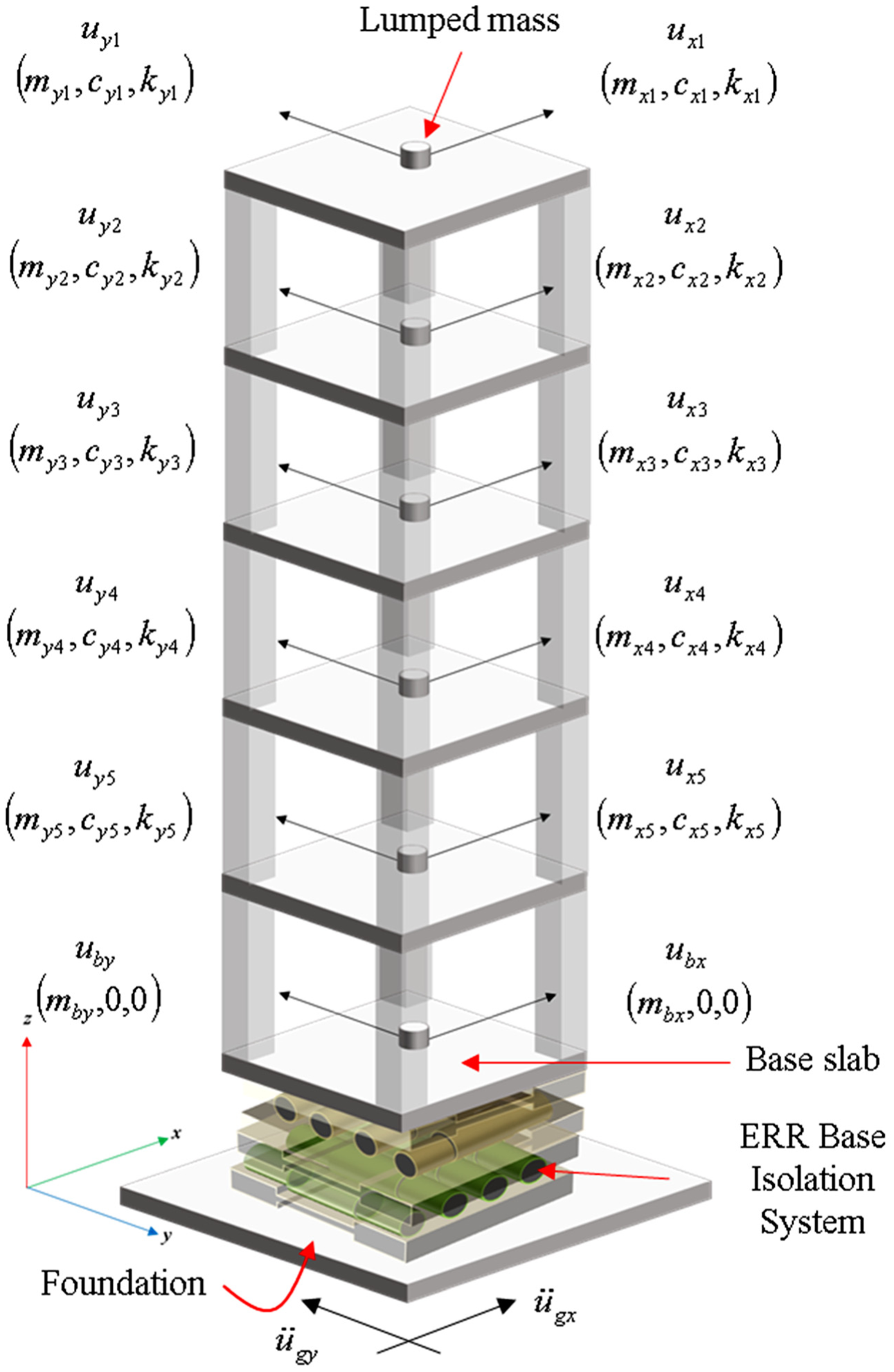
Mathematical model of flexible-shear type multi-storey building mounted on elliptical rolling rods (ERRs).

Conceptual 3D views of the ERR with grooves.
Kinematics of an elliptical roller in the ERR base isolation system
Figure 3(a) and (b) shows state of equilibrium and non-equilibrium position of a single roller in an ERR base isolation system assembled below the base mass as shown in Figure 1. The sum of inertial, damping, and stiffness properties of the multiple rollers along one direction is represented by an equivalent roller in that direction. Hence, in a simplified form, the ERR base isolation system can be represented by two uncoupled rollers: (1) one roller rotating about the y-axis and (2) second roller rotating on top of the first roller about the x-axis. The bottom roller, at its center of mass, has 3 degrees of freedom (horizontal, vertical, and rotation) in x-z plane as illustrated in Figure 3(a), and similarly, the top roller has 3 degrees of freedom in the y-z plane. Figure 3 shows the elliptical geometry of an equivalent roller in the ERR base isolation system with a major radius, a and a minor radius, b resting along the length of its major axis. This geometrical configuration is maintained the same for both the orthogonally placed top and bottom rollers in the ERR base isolation system. The eccentricity of the rods, e, is considered equal for both the top and bottom rollers and is given as

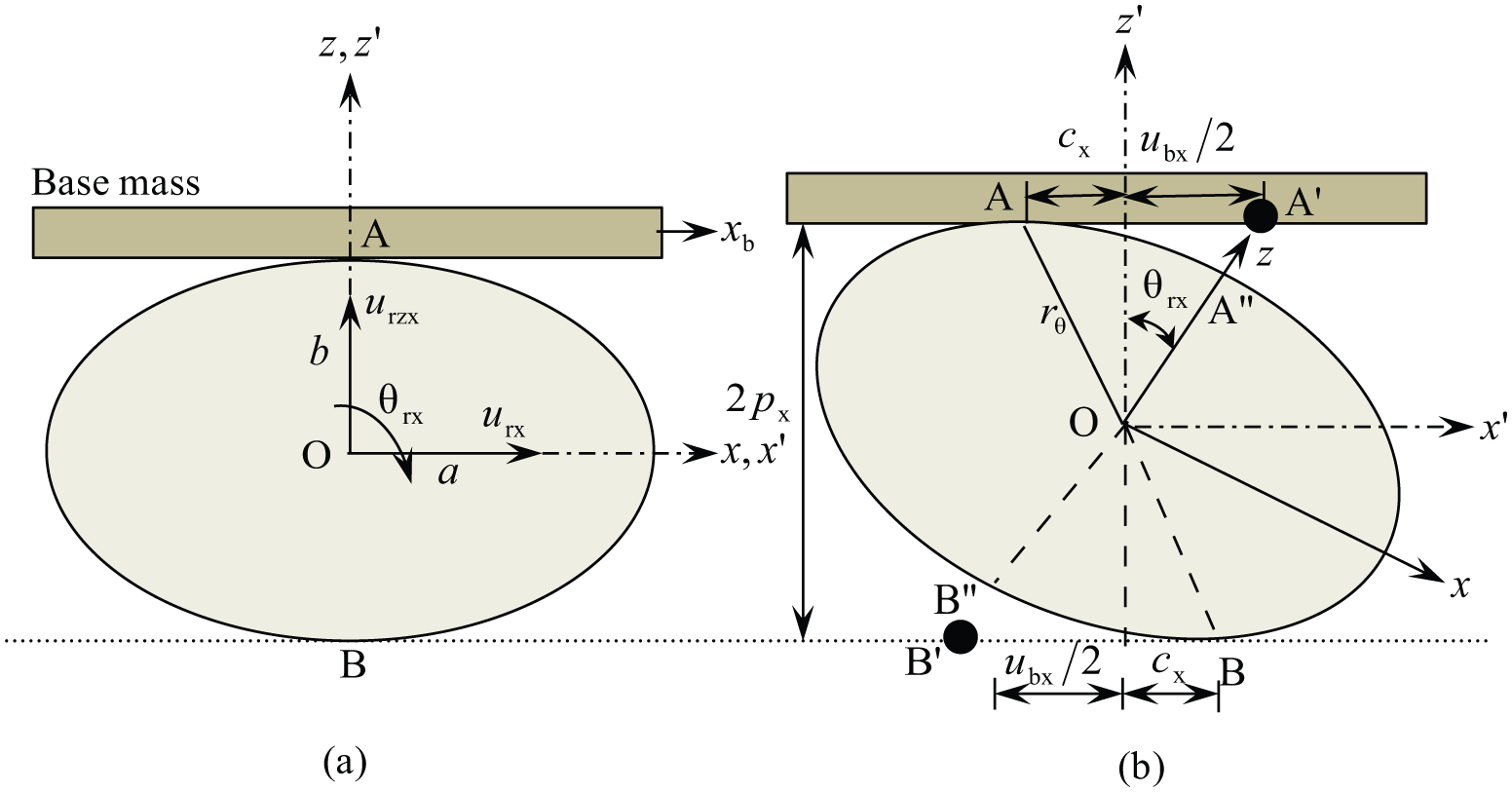
Relationship between displacements of the base mass and ERR in x-z plane.
The eccentricity of the rolling rods develops an additional restoring force which brings the building back to its original position after an earthquake event. As a special case, zero eccentricity (e = 0) implies an isolation system with cylindrical rolling rod. Herein, the kinematic relationships for bottom roller rotating about y-axis are discussed. The kinematic relationships of the top roller can be derived in a similar way. The relation between the displacement of the base mass and the ERR expressed in equations (2) to (4) in the x-z plane are evaluated from Figure 3(a). If



Furthermore, if px is half the vertical distance between the lower and upper pole points (A and B) as shown in Figure 3(b) of the system in the x-z plane, then

Here,

By equating the distances

where
Dynamical equations of motion for the ERR
Consider the equilibrium of forces acting on a roller rotating about y-axis in a state of displaced position as shown in Figure 3(b). There are three forces acting tangentially at the two points of contact in the roller: (1) isolator inertial force, (2) isolator restoring force, and (3) isolator rolling frictional force. These three forces act for both the top and bottom rollers but in their respective orthogonal directions. However, in this study, the case is illustrated with Figure 3(b) for the bottom roller rotating about the y-axis. The inertial force of the isolator,

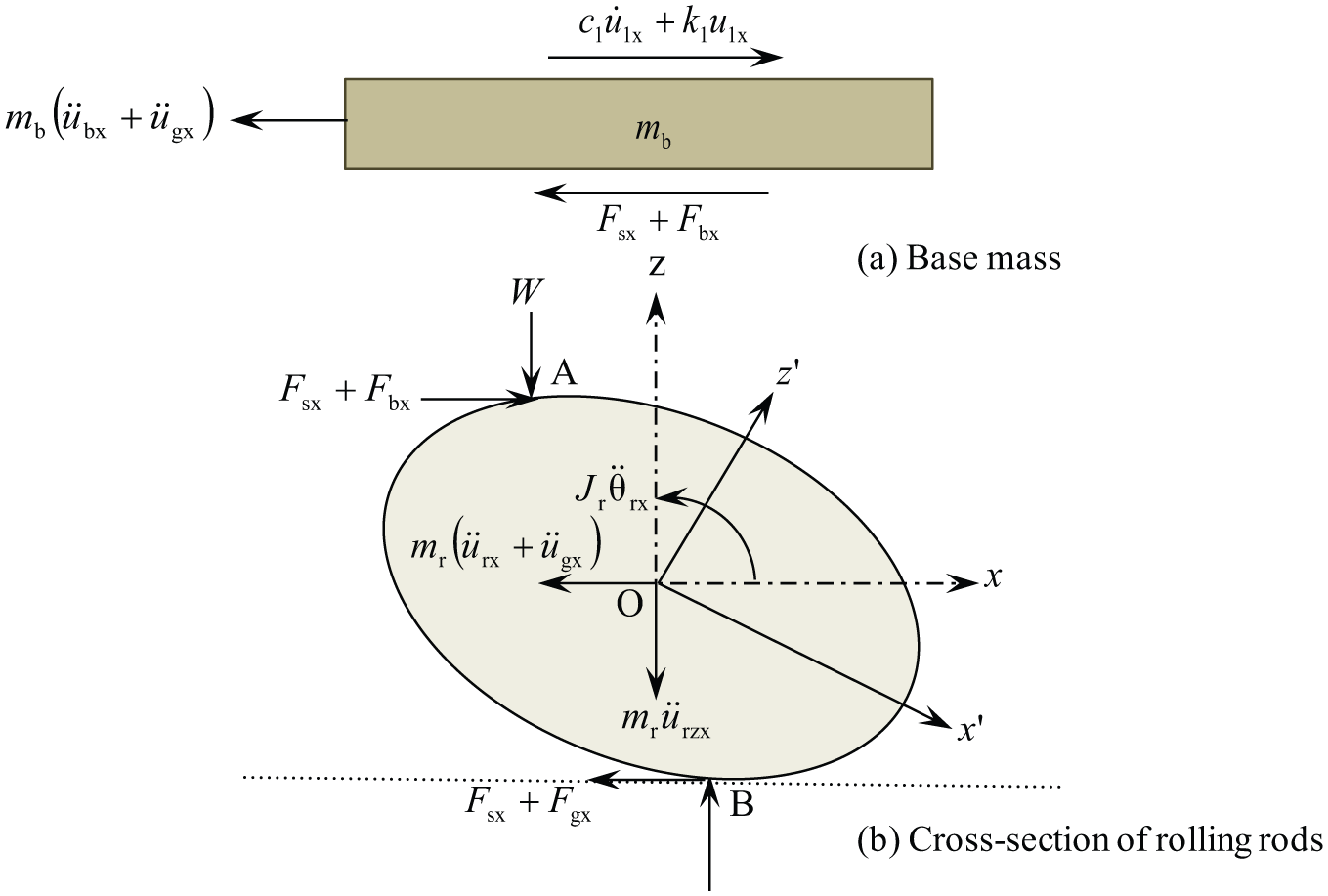
Free-body diagram of the base mass and rolling rods along the x-direction: (a) base mass and (b) cross-section of rolling rods.
Likewise, the isolator force,

Here, Jr and mr are the sum of mass moment of inertia and mass of the bottom rolling rods, respectively. Furthermore,
The restoring force,

Likewise, the isolator restoring force,

where
The rolling frictional force is directly related to the normal force acting at the contact points of the roller. This normal force is the sum of gravity force of the building mass and the vertical force due to the vertical acceleration of the building. The frictional force, thus mobilized as a result of dry coulomb law, acts tangentially at the two points of contact in the roller and opposite to the direction of motion. The isolator rolling frictional force for the bottom roller rotating about the y-axis along the x-direction is expressed as

Likewise, the isolator rolling frictional force,

where μR is the coefficient of rolling friction between the base mass and the rolling rods, sgn(·) denotes the sign function, that is,
Dynamical equations of motion for the base-isolated building
For the present study, a five-storey regular and uniform building with zero eccentricity is considered mounted on an ERR base isolation system. The building and the ERR are symmetrical in the both the orthogonal directions and have uncoupled dynamic properties along both x- and y-directions. Thus, there are no coupled interactions between the responses for the structural system. The equations of motion of an N-storey shear type flexible ERR base-isolated building subjected to bi-directional earthquake ground motion can be expressed in the matrix form as

or, in concise form, equation (14) can be written as

where
The equations of motion for a fixed-base N-storey shear type building subjected to bi-directional earthquake ground motion is reduced from equation (15) and is expressed as

For the fixed-base building, the damping matrix
Solution procedure
The governing equations of motion for the ERR base-isolated shear type building are nonlinear. Therefore, the equations of motion are solved in the incremental form by numerical time integration.
Integration of equations of motion
Equations (14) and (16) can respectively be expressed in their incremental form as


The above equations are integrated using the Newmark-β method considering linear variation of earthquake acceleration between the original data points in the discrete time interval record. The choice of equations (17) or (18) in each time step depends upon the rolling or non-rolling phase at the isolator level. If the isolator is in the rolling phase, equation (17) is integrated while if the isolator is in the non-rolling phase, equation (18) is integrated. It is to be noted that equation (17) requires the determination of
Conditions for rolling/non-rolling phase
The condition for rolling occurs when the velocity and acceleration of the base mass are zero (i.e.

Flowchart for rolling/non-rolling condition.
The base shears in x- and y-directions are respectively given by the following expressions


The ERR base isolation system starts to roll in x-direction if

and the ERR base isolation system starts to roll in y-direction if

The checks for the rolling condition are
Conditions for isolator stability
The isolator, if rotated beyond
Numerical study
Seismic performance of the bi-directional ERRs for base isolation of buildings subjected to near-fault earthquakes is investigated. In the present study, the superstructure is assumed symmetrical with no eccentricity. Therefore, a planar frame with equivalent dynamic properties is considered for a simplified analysis in both the orthogonal directions. For the frame, mass and stiffness of each floor are kept equal along x- and y-directions (i.e. mi = m for i = 1, 2,…, N and ki = k for i = 1, 2,…, N). The mass matrix of the superstructure,
The superstructure and the base mass of the isolated structural system under consideration can be completely characterized by the parameters, namely, the fundamental time period of the superstructure (Ts), damping ratio of the superstructure (ξs), number of stories in the superstructure (N), the ratio of base mass to the superstructure floor mass (mb/m), ratio of rolling rod mass to the superstructure floor mass (mr/m), coefficient of rolling friction (
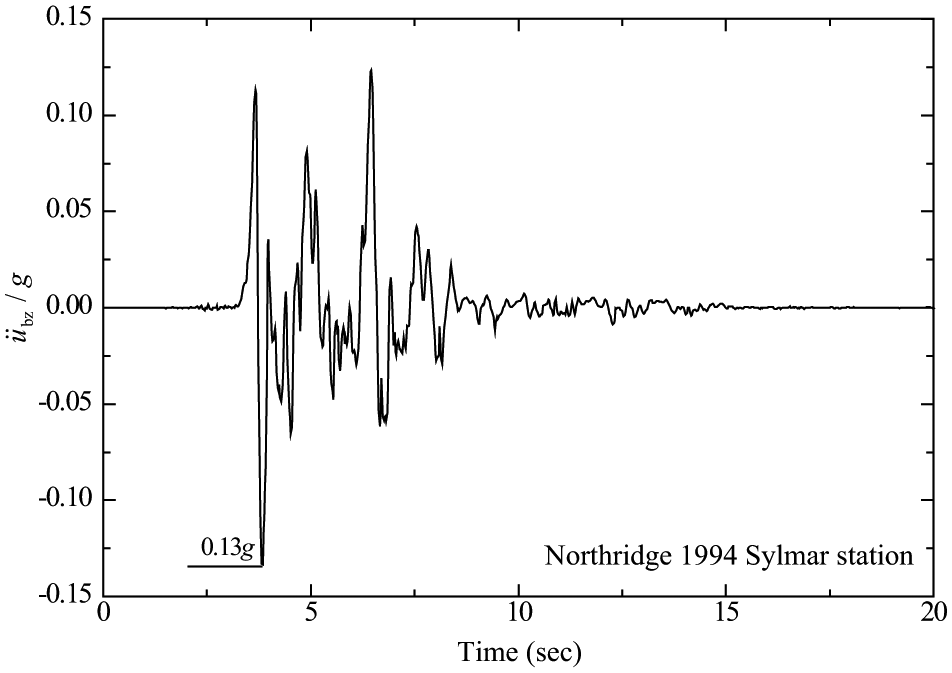
The seismic response of the base-isolated structure is obtained under the fault-normal and fault-parallel components of six real near-fault earthquake ground motions. The peak ground acceleration in terms of g (acceleration due to gravity) of the selected earthquake ground motions is shown in Table 1. The normal and parallel components of the near-fault motion are applied in the x- and y-directions of the base-isolated building mounted on the ERR, respectively. The building has a set of lateral displacements in each x-direction (uxi) and y-direction (uyi) relative to the base mass; hence, the resultant displacement,
Near-fault earthquake ground motions.
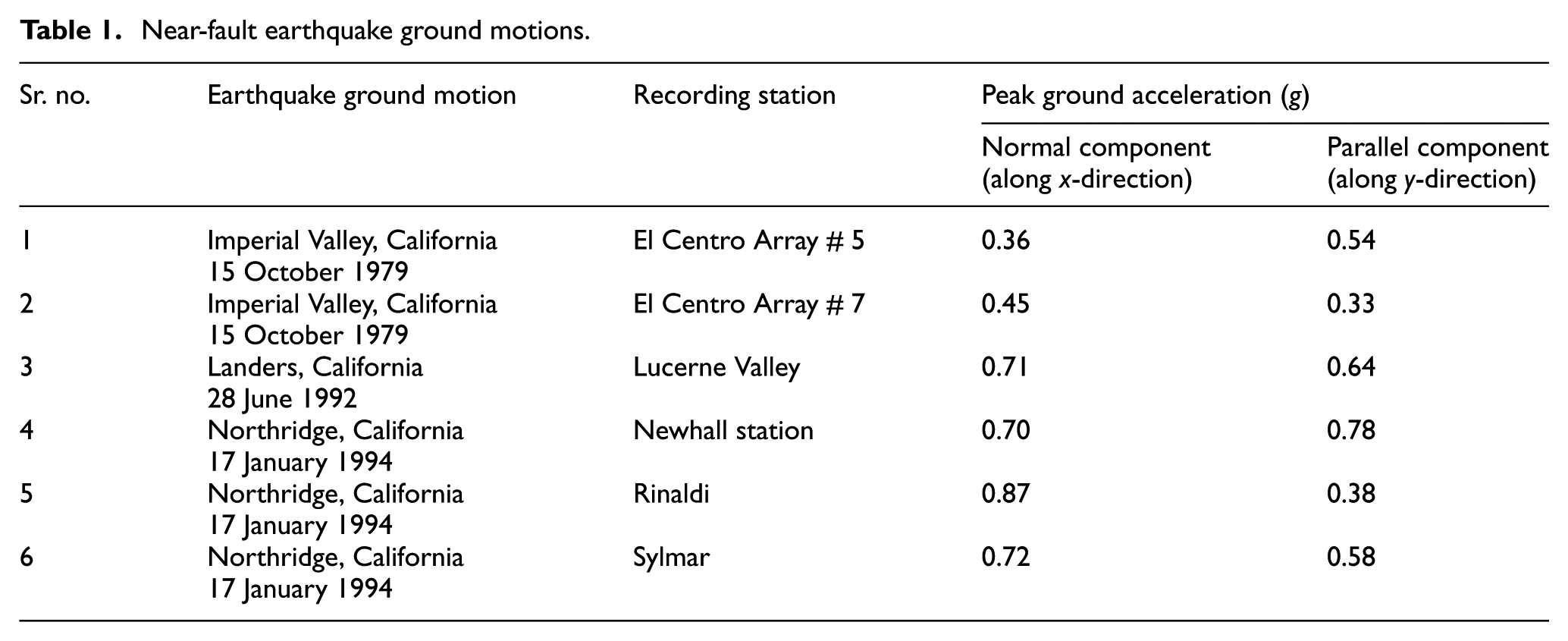
Figure 6 shows the bi-directional time history response of the top floor absolute acceleration and isolator displacement of the building mounted on an ERR when subjected to the Northridge, 1994 (Sylmar station) earthquake ground motion along x- and y-directions. The fundamental time period of the superstructure in both the directions is 0.5 s; the ERR base isolation system has an eccentricity, e = 0.5, and coefficient of rolling friction, μr = 0.01, for both the top and bottom rollers. In Figure 7, it is compared against a pure-friction (P-F) base isolation system with coefficient of sliding friction, μs = 0.01, and a cylindrical rolling rod base isolation system with a coefficient of rolling friction, μr = 0.01, along x- and y-directions.

Time history response of the top floor absolute acceleration and base displacement under Northridge 1994 earthquake (Ts = 0.5 s, e = 0.5, and µ = 0.01).

Time history response of
Although it is argued that base isolation is ineffective under near-fault earthquakes due to excessive displacements, it is evident from Figure 6 that even under the near-fault earthquakes the base-isolated building mounted on the ERR base isolation system shows significant reduction in the seismic response when compared with the non-isolated building. The peak absolute acceleration responses of the fixed-base building are 16.68 m/s2 along the x-direction and 31.32 m/s2 along the y-direction. The peak top floor absolute acceleration for the building mounted on the ERR base isolation system along the x-direction is 1.34 m/s2, while the value for the P-F and cylindrical rolling rod base isolation systems with same design parameters are 1.30 m/s2 (−0.04 m/s2, −3.0%) and 1.32 m/s2 (−0.02 m/s2, −1.5%), respectively. The values in the bracket indicates the change in value and the change in percentage with the corresponding response of the building with the ERR base isolation system. Again, the peak top floor absolute acceleration along y-direction is 1.22 m/s2 for the building mounted on the ERR base isolation system while the responses obtained for P-F and cylindrical rolling rod base isolation systems are 1.45 m/s2 (0.23 m/s2, +18.8%) and 1.42 m/s2 (0.20 m/s2, +16.4%), respectively. It is noted that although the performance of the P-F and cylindrical rolling rod against the ERR base isolation systems has marginally improved in x-direction and slightly worsened in y-direction (as indicated in the magnified graph appended in Figure 6), the magnitude of change in comparison to the fixed-base response is still negligible. It is, however, worth noting that the top floor absolute acceleration has reduced by almost 92% and 96% in the ERR base-isolated building as compared to the fixed-base building in x- and y-directions, respectively. Thereby, it signifies a considerable reduction in the seismic base shear developed in the columns and the advantage of base isolation using the ERRs under near-fault earthquakes.
The peak isolator displacement for the building mounted on the ERR base isolation system along the x-direction is 56.4 cm while for P-F and cylindrical rolling rod base isolation systems are 91 cm (35 cm, +61%) and 87 cm (31 cm, +54%), respectively. Again, for the building mounted on the ERR base isolation system, the peak displacement is 15 cm along y-direction in comparison to 12 cm (3 cm, −20%) and 17 cm (−2 cm, −13%) for the P-F and cylindrical rolling rod base isolation systems, respectively. It is noted here that the performance of the ERR base isolation system is superior to the P-F and cylindrical rolling base isolation system with significant reduction along x-direction. In the Northridge 1994 earthquake, the prominent velocity pulse arrives in x-direction and the ERR has been able to reduce the isolator displacement with a considerable average magnitude of 33 cm.
For the Northridge 1994 earthquake, if the overall response scenario is assessed with respect to the ERR base isolation system, the top floor absolute acceleration reduced by an average 94% and the isolator displacement reduced by 58%. Also, the maximum isolator displacement developed in the ERR base isolation system based on the maximum rotational angle (
Figure 7 shows the time history variations of the seismic response quantities such as
The eccentricity of the ERR is responsible for the development of the undesirable vertical acceleration. Therefore, its variation with respect to time is plotted to check its magnitude and also to check its effect on the stability of the building. Figure 7 also shows the individual plot of the vertical acceleration for the bottom and top roller along x- and y-directions, respectively. The peak vertical acceleration are 0.10 g and 0.05 g for the rollers moving along x- and y-directions, respectively, which is much lower than the acceleration due to the gravity. The building frames are in general designed to take gravity loads for 1.0 g. In the worst case scenario, it may happen that reversal of member stresses may affect long-span member of the building; yet, the magnitude is quite low to inflict any significant damage for a regular well-designed building.
Again, Figure 7 shows the time history responses of isolator frictional force
The time response variation of ratio of isolator inertia force (Fb) transmitted to the base mass to the total weight (W) of the building is also shown in Figure 7. The peak isolator inertial force transmitted to the foundation is around 8% of the weight of the structure, which is not very high and can be reduced using lower density material for the design of the ERR base isolation system. These plots signify the effect of the horizontal forces on the horizontal balance of the overall base-isolated structure, which is one of the main factors in the design of a stable ERR base isolation system. The time variation of Fs and Fb is less than the total weight of the building which shows the stability of building against the lateral force induced during the seismic activity.
At any time instant, the absolute vertical acceleration developed in the base slab or the building is the sum of vertical acceleration due to the motion of bottom and top rollers in x- and y-directions, respectively. The separate vertical acceleration of bottom and top roller is shown along x- and y-directions in Figure 7. The time variation response of absolute vertical acceleration is shown in Figure 8. The maximum value of absolute vertical acceleration in the base slab is 0.13 g, which is much lower than the acceleration due to gravity. To increase the margin of safety of the ERR base isolation system, the major radii or eccentricity of the isolator can be increased. However, this will be at the expense of higher top floor absolute acceleration.
Time history response of sum of
Figure 9 shows the variation of the peak average top floor absolute acceleration and isolator displacement with respect to the eccentricity of the ERR base isolation system, which are taken as e = 0.25 and 0.5. It is compared against P-F and cylindrical rolling rod base isolation systems for various superstructure time periods of the five-storey building. The increased superstructure time period (Ts) signifies increased superstructure flexibility. A coefficient of friction µ = 0.01 is adopted for this parametric study. It is observed that the acceleration is marginally increased by increasing the eccentricity of the ERR, that is, with increased eccentricity the induced seismic forces are increased; however, the isolator displacement is reduced by increasing the eccentricity of the ERR to e = 0.5. The peak top floor absolute acceleration and bearing displacement are significantly reduced by the ERR base isolation system in comparison with the P-F and cylindrical rolling rod base isolation systems. Thus, the eccentricity (e) of the ERR is a crucial design parameter in controlling the peak top floor absolute acceleration and isolator displacement. Tradeoff exists between the seismic forces induced and isolator displacement while choosing an appropriate eccentricity of the ERR base isolation system. The optimally designed ERR would thereby be an effective isolation system for near-fault ground motions to reduce seismic acceleration induced in the buildings and to limit the isolation displacement, which otherwise is quite high that utterly demands increased moat width and specialized peripheral services to render the building in a serviceable state while accommodating the large isolator displacements in the event of a near-fault type earthquake. Furthermore, the use of the supplemental dampers in controlling the large isolator displacements in case of the base-isolated buildings constructed in the near-fault sites is not necessary if the ERR is designed accordingly.
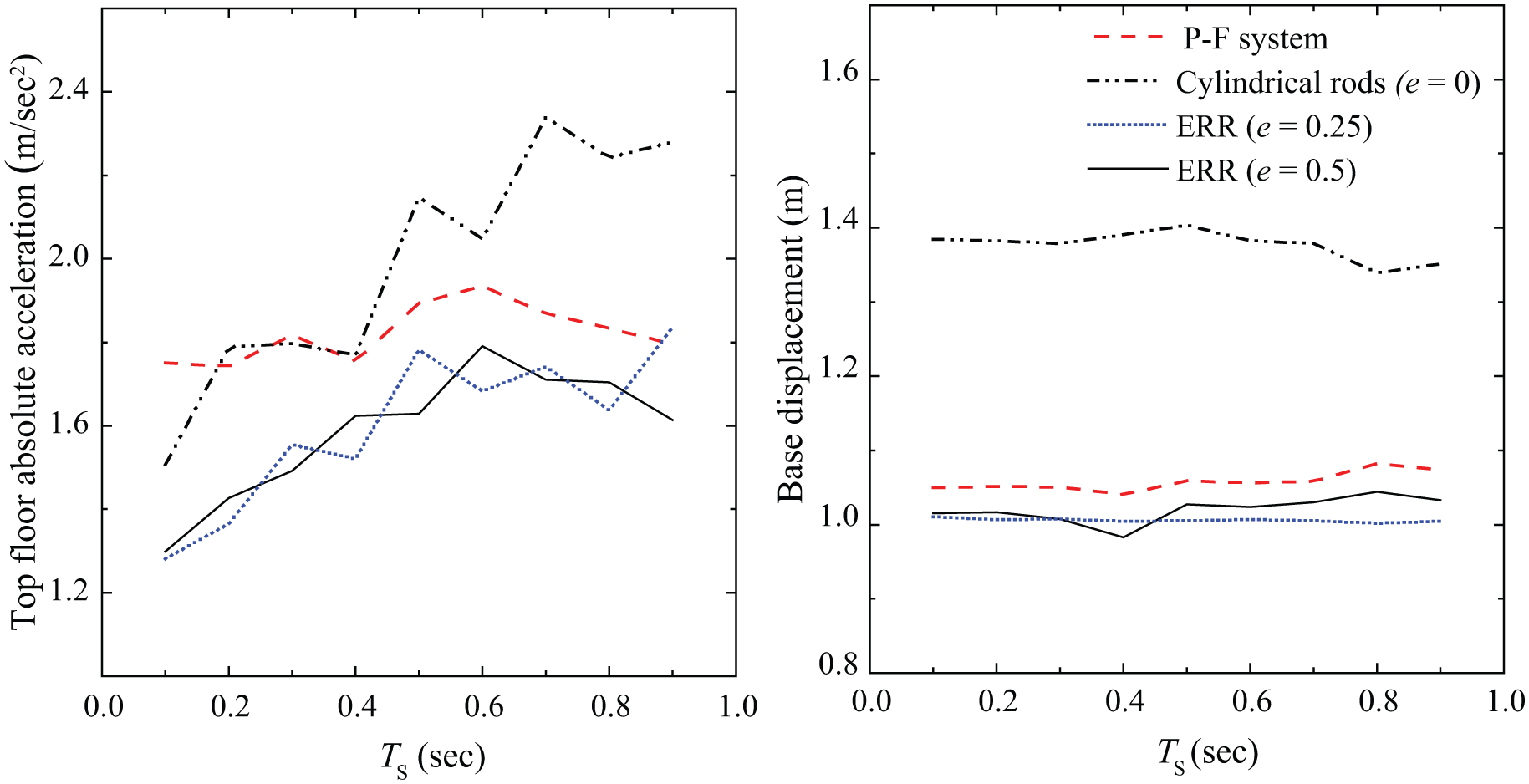
Effect of fundamental time period of superstructure on peak average top floor absolute acceleration and bearing displacement of a five-storey base-isolated building (µ = 0.01).
Figure 10 shows the effect of coefficient of rolling friction (

Effect of coefficient of friction on peak average top floor absolute acceleration and bearing displacement of a five-storey base-isolated building (Ts = 0.5 s).
From Figures 9 and 10, it is observed that peak average top floor acceleration typically increases with the increase in the superstructure flexibility whereas the isolator displacement is unaffected with the increased superstructure fundamental time period (Ts). It may be inferred from this observation that base isolation is more effective for the rigid superstructures as compared to the flexible superstructures; thereby, base isolation is most attractive choice for low- to mid-rise buildings in making them earthquake resistant.
Conclusion
Multiple dynamic analyses are conducted with varied set of superstructure and isolator parameters to study the behavior of a flexible-shear type multi-storey building mounted on ERR base isolation system subjected to bi-directional components of near-fault earthquake ground motions. The effective isolation of the building is achieved through judicious choice of the ERR base isolation system parameters: (1) maximum design isolator displacement (indirectly related to the major radius of the roller), (2) eccentricity, and (3) coefficient of rolling friction. The parametric study is conducted to investigate the effects of several important parameters such as eccentricity, coefficient of friction, superstructure time period of the building, and different near-fault earthquake ground motions. From the present study, the following conclusions have been drawn:
The ERR base isolation system is effective in mitigation of damaging effects of the near-fault earthquake ground motions in multi-storey buildings. Even under the near-fault earthquake ground motions, the base-isolated building with the ERR showed considerable response reduction. The ERRs are found effective than the pure-friction (P-F) and cylindrical rolling rod systems.
Isolator displacements for an ERR base isolation system is lower as compared to the pure-friction (P-F) and cylindrical rolling rod base isolation systems.
The top floor absolute acceleration increases with increase in superstructure flexibility, whereas the isolator displacement is unaffected with the increased time period of the building.
The peak isolator displacement is reduced with the increasing value of the eccentricity of the ERR; however, it has less effect on the absolute acceleration of the building.
The effectiveness of the ERR increases with reduced coefficient of friction, and in comparison with the pure-friction (P-F) and cylindrical rolling rod base isolation system, it is most effective when the coefficient of rolling friction is in the range of 0.05–0.10.
Application of the ERR isolators for a building is a new development, and hence, it opens possibilities for further research to enhance its viability and performance in its application. The subsequent research needs to address some of the following salient issues:
The ERR might exhibit skidding, which a finite sliding friction model can assess the residual displacement due to translational movements due to the isolator inertial force.
The vertical component of earthquake ground motion can be included to understand the positive effects of the potential vertical flexibility which the ERR offers in its non-equilibrium state.
3D finite element analysis can be carried out to understand the effect of deformations produced in the ERR on the seismic response.
Footnotes
Appendix 1
Appendix 2
If
where
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was financially supported by the Science and Engineering Research Board (SERB), Department of Science and Technology (DST), Ministry of Science and Technology, Government of India to Dr Vasant Matsagar for conducting the investigations on “Innovative Bi-Directional Base Isolation System for Earthquake Protection of Structures” vide SR/FTP/ETA-0076/2011.