
Abstract
Structural nonlinearity identification is critical for post-event damage detection or condition evaluation of engineering structures after strong dynamic excitation such as earthquake where structural nonlinear behaviour should be considered. Structural nonlinear restoring force provides direct indicator describing structural damage initiation and development procedure. Considering the availability of structural dynamic response measurement and the difficulty in defining a parametric model for structural nonlinearity and in estimating structure mass accurately in practice, in this article, a time-domain structural nonlinear restoring force and mass identification approach for multi-degree-of-freedom structures under incomplete excitation using limited acceleration measurements but without using any parametric models of structural nonlinear restoring force is proposed. At first, a memory fading extended Kalman filter with a weighted globl iteration (MF-EKF-WGI) is used to identify the location of nonlinearities and then a Chebyshev polynomial nonparametric model is introduced to model the nonlinear restoring force. The unscented Kalman filter is used to identify the structural responses and the parameters of the Chebyshev polynomial to describe structural nonlinearity. Numerical and experimental studies with a four-storey frame model structure equipped with a magnetorheological damper, which is employed to mimic structural nonlinear behaviour, under impact excitations are carried out to validate the performance of the proposed approach using acceleration measurements at certain degrees of freedom. Numerical and experimental results show that the proposed approach is capable of identifying both structural nonlinear restoring force and mass with acceptable accuracy even with a very rough initial mass estimation. The proposed time-domain identification approach can be used to detect structural damage initiation and development process and to evaluate energy consumption quantitatively of engineering structures under dynamic loadings.
Keywords
Introduction
Civil infrastructures such as buildings and bridges are expected to deteriorate with time and many of them may also suffer strong dynamic excitations, such as earthquakes. Therefore, it is critical to develop damage identification approaches for the condition evaluation of engineering structures during operation or after strong dynamic excitation. The development of post-event identification approach which can consider structural nonlinearity is desired. Generally speaking, structural damage usually results in changes in structural parameters such as the stiffness and damping ratio, thus leading to changes in structural eigenvalues and eigenvectors. In the past decades, great progresses have been made on vibration-based structural identification for structural damage detection, where structural damage is usually expressed as decrement in structural stiffness and is identified based on the changes in structural frequencies or modal parameters or their derivatives (Doebling et al., 1998; Sun and Li, 2003; Wu et al., 2003).
Strictly speaking, structural identification approaches based on structural eigenvalues and eigenvectors or their derivatives are only applicable to linear elastic systems. As the initiation and development of structural damages is a typical nonlinear process, identification approaches using structural frequencies and modal shapes are no longer suitable for nonlinear structures. Therefore, it is highly desired to develop structural damage identification approaches and to evaluate structural condition after dynamic excitations by considering structural nonlinearity. Moreover, structure nonlinear behaviour identification results in the form of structural nonlinear restoring force (NRF), which is the result of most of the structural behaviour tests, are more important and helpful for structure remaining load-carrying capacity estimation as well as service life forecasting than identified structural stiffness, which usually provides an equivalent stiffness of a nonlinear structure.
Worden et al. (2002) described numerous approaches for the detection, identification and modelling of nonlinear systems in several studies (Worden et al., 2002). Yang et al. (2007b) used least square estimation (LSE) to identify structural damages with unknown excitations, and this method has been extended in several studies (Yang et al., 2007b; Xu et al., 2012b). However, LSE methods always require the displacement and velocity measurement so that they could not be used in many practical situations when displacement and velocity responses are unavailable. Green (2015) detailed the Bayesian identification of a nonlinear dynamical system using the Markov Chain Monte Carlo (MCMC) algorithm. Chatzi and Smyth (2009) and Wu and Smyth (2007) applied both the unscented Kalman filter (UKF) and the particle Filter methods for a three degrees of freedom (DOFs) structure, which includes a Bouc–Wen hysteretic element. Other related methods based on Kalman filter (KF) and particle filter were also proposed (Bernal, 2013; Chatzi and Smyth, 2013; Ching et al., 2006; Eftekhar Azam and Mariani, 2012; Naets et al., 2015; Zghal et al., 2014). Most of the existing LSE, KF, UKF and the MCMC methods for structural nonlinearity identification aim at identification of parameters of an assumed nonlinear parametric model, such as the Bouc–Wen hysteretic model, which is widely employed in engineering.
In reality, it is hard to model nonlinear behaviour of an engineering structure in an exact parametric model due to the strong individuality of engineering structures with different materials and structural types. Therefore, identification of structural behaviour in a nonparametric way is attractive in practice. It is therefore crucial to develop model-free algorithms to identify the structural damage. For this purpose, Masri and Caughey (1979) proposed a restoring force surface method (RFSM) to identify a single DOF nonlinear structure successfully, and the method was extended to a multi-degree-of-freedom (MDOF) system (Masri et al., 1982). Based on the uses of power series expansions, a relatively simple nonparametric technique for nonlinearities identification of a variety of discrete nonlinear vibrating systems has been developed by Yang and Ibrahim (1985). Masri et al. (1987a, 1987b) developed a self-starting, multi-stage, time-domain approach for nonparametric identification of nonlinear MDOF systems undergoing free oscillations or subject to arbitrary direct force excitations and/or non-uniform support motions. Xu et al. (2009, 2015b) proposed an approach to identify NRF using excitation and dynamic response based on the equivalence linear theory and the LSE and verified the method experimentally with a four-storey frame structure equipped with a magnetorheological (MR) damper. Based on the power polynomial model and Chebyshev polynomial model, Xu et al. (2012a, 2014a, 2014b, 2015a) proposed a model-free method to identify NRF, and the method was validated in an MDOF nonlinear structure equipped with an MR damper and a shape memory alloy (SMA) damper. The above identification methods proposed by Xu et al. using nonparametric structure nonlinear behaviour models usually require the structural displacement and velocity responses as known variables. In practice, it is necessary to identify structure mass because living loading widely exists, and the actual mass corresponding to different DOFs cannot be treated as a known parameter. Therefore, it is also important to develop identification approach which can be used to identify structural mass simultaneously.
In order to develop an effective method for system identification using only partially available dynamic measurements, He et al. (2012) proposed a time-domain structural parameters and external loading identification approach, namely, weighted adaptive iterative LSE with incomplete measured excitations and complete responses in a linear system and further applied to nonlinear system by combining with power series polynomial model (He et al., 2012). Because it is not practical to obtain all dynamic responses at each DOF of a structure for identification and usually it is convenient to obtain acceleration response, it is important to develop identification approach for structural NRF identification under limited acceleration response measurements.
The KF was first proposed for structural damage detection using limited dynamic response measurement by Kalman (1960). The KF is an estimation method using the recursive minimum variance based on state space, including the classical KF, the extended Kalman filter (EKF) and the UKF (Jazwinski, 2007; Julier et al., 1995; Wan and Merwe, 2000). Hoshiya and Saito (1984) incorporated a weighted global iteration procedure into the EKF (EKF-WGI) to overcome its shortages of convergence difficulty and the sensitivity on initial conditions. Yang et al. (2006, 2017a) proposed an adaptive tracking technique based on the EKF to identify structural parameters and their changes and further identified the unknown input with improved EKF approach (Yang et al., 2006, 2017a). Xu and He (2015) combined the EKF-WGI algorithm with the substructural identification approach to identify the structural physical parameters and unknown excitation under partial output and input measurement. Wu and Smyth (2007, 2008) used UKF to identify the parameters of simplified and complex Bouc–Wen model. Liu et al. (2015) proposed a two-stage model-free identification method for nonlinear structural systems under limited observation responses. It should be noted that the known structure mass is always assumed in most of the above methods.
In this study, a model-free nonparametric identification approach by combining EKF, UKF and Chebyshev polynomial for structural NRF and mass identification using limited acceleration measurements is proposed. Firstly, the mass and structural parameters of the structure to be identified were assumed, and a memory fading EKF-WGI(MF-EKF-WGI) method combined with the equivalent linear theory was used to identify the mass and to identify the location of nonlinearities. The mass of each DOF was included in the state vector. Secondly, the NRF was expressed with the Chebyshev polynomial model in a nonparametric way. The extended state vector contains the coefficients of the Chebyshev polynomial and mass. Thirdly, the UKF method was used to identify unknown structural dynamic responses and parameters. Finally, the NRF was determined with the measured and identified structural dynamic responses and the identified Chebyshev polynomial model. The proposed approach was validated using an MDOF structure equipped with an MR damper numerically and a four-storey frame structure under impact loadings experimentally. Results show that the proposed approach can identify structural NRF and mass with acceptable accuracy. This approach is of great significance for post-event performance evaluation for engineering structures after strong dynamic excitation such as earthquake.
Formulation and model-free identification approach with limited acceleration measurements
In this article, a model-free structural NRF and mass identification approach using limited acceleration measurements is proposed. The identification approach comprised the following four steps.
Structural nonlinearity location and structural parameters identification
For a real structure, using the double Chebyshev polynomial models to express the NRF between all the DOFs leads to a large number of coefficients to be identified. In practice, for an engineering structure under dynamic loadings, nonlinear behaviour initiates and develops only at limited structural members. It is reasonable to identify the location of nonlinear members and to identify the nonlinear behaviour of the corresponding members rather than them of all structural members. Therefore, in this study, a combination of memory fading filter technique with the MF-EKF-WGI (Wang and Cui, 2015) and equivalent linear theory are used to identify the location of structural nonlinearities. The mass of each DOF is also included in the state vector of EKF-WGI.
By this method, the location of nonlinearities can be defined and the reference parameters of the structure which are used in UKF can be obtained. For the identified nonlinear members, a double Chebyshev polynomial model is employed to describe the NRF.
NRF using double Chebyshev polynomial model
The multiple angle formula of cosine function can be expressed as

Assuming

where n = 0, …, N. The recursive relationship as shown in equation (3) can be determined







The motion equation of an N-degree-of-freedom (n-DOF) nonlinear structure can be expressed as

where
In particular,

where
In this study, without using any parametric models for structural nonlinear behaviour, the NRF between the DOFs i and i−1 is described in the form of the double Chebyshev polynomial of structural relative velocity, relative displacement as shown in equation (7)
where


where
UKF for unknown dynamic response and coefficients of polynomial forecasting
The central idea of UKF is to use deterministic sample points to calculate the mean and variance of nonlinear changes of Gaussian random variables. The accuracy of calculation is up to third order of Taylor expansion by unscented transform (UT), and the calculation of Jacobian matrix and Hessian matrix in EKF can be avoided. For a general n-DOF system, the extended state vector

The observation equation is expressed as follows

where
1. Calculate the observation at the (k − 1)th time step






where
2. Time update process






Using the above UKF approach, structure velocity, displacement, unknown acceleration response, the coefficients of the Chebyshev polynomial and mass can be identified. When the coefficients of the Chebyshev polynomial are identified, and the NRF can be determined using the identified structural displacement and velocity response. The proposed NRF and mass identification approach can be carried out in the steps as shown in Figure 1.
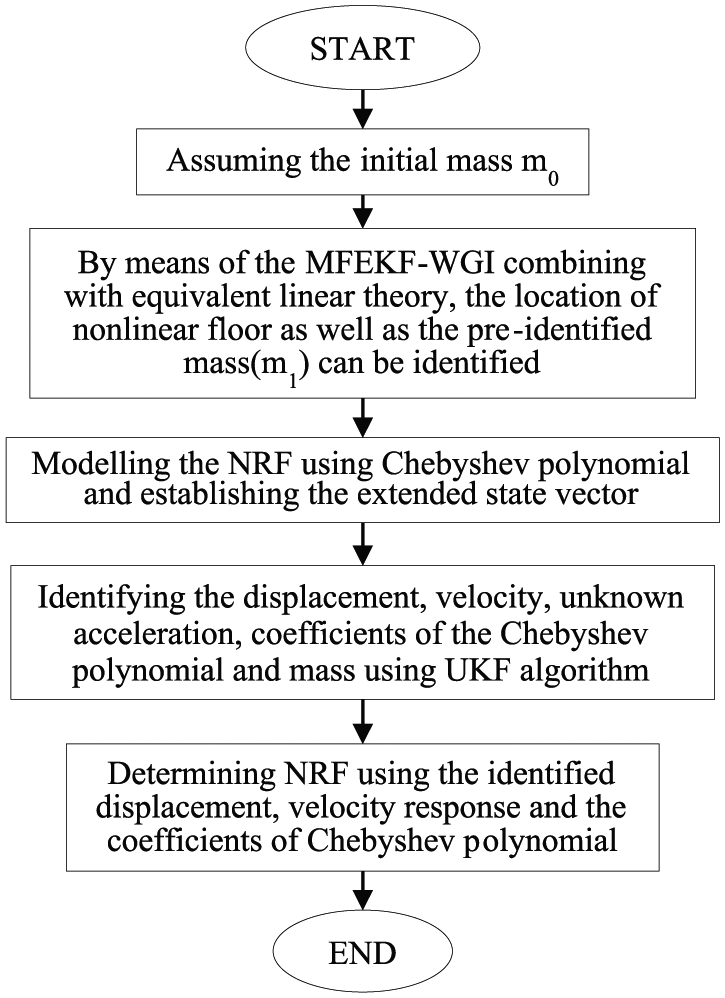
Flowchart for NRF and mass identification.
3. The measurement is updated according to the following Equations.



Numerical simulation validation using an MDOF model with MR damper
Nonlinear MDOF structure numerical model
To illustrate the accuracy of the proposed method under discussion, a 4-DOF nonlinear lumped mass structure is considered as an example as shown in Figure 2. In this model, each storey contains one horizontal DOF. The properties of the corresponding linear structure are
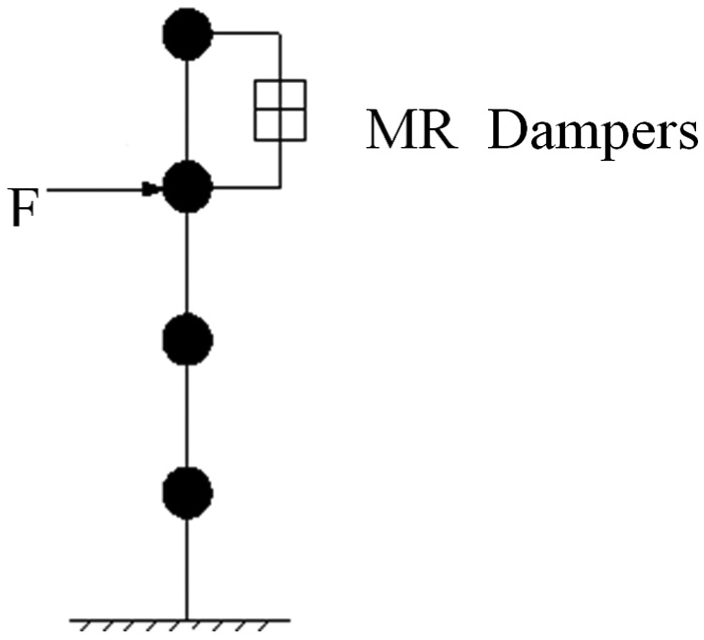
Structure numerical model.
To illustrate the applicability of the method, a random excitation is applied to the third floor of the model, and the time history of the excitation is shown in Figure 3. The dynamic response of the nonlinear 4-DOF model is determined with
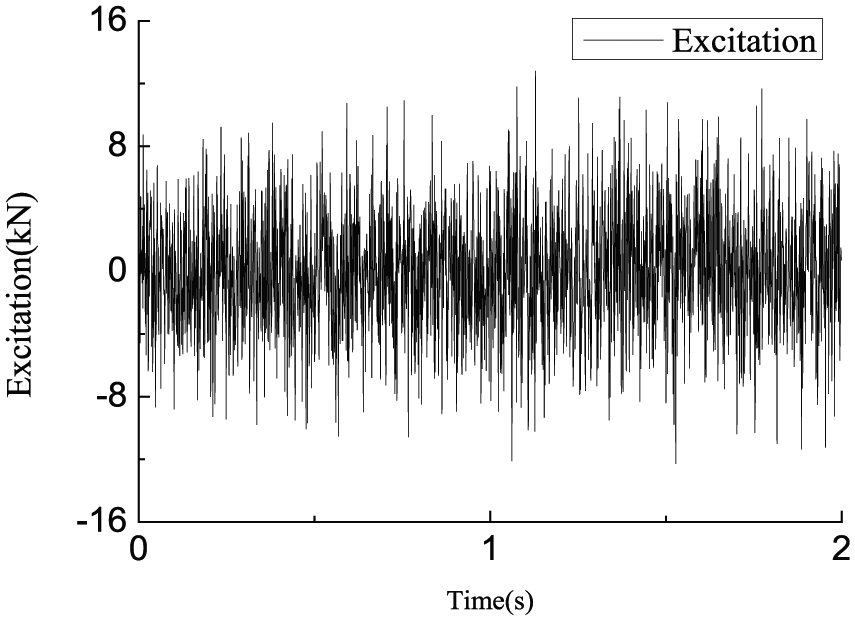
External excitation force time history.
There are various parametric numerical models for MR dampers. In this study, the modified Dahl model described in the following equation is used (Zhou and Qu, 2002)

where

In this example, the value of the parameters are set as follows:

The initial values of the mass take the values of ±40% of the corresponding true values. Once the coefficients of the Chebyshev polynomial are identified, the NRF can be calculated with the help of the identified displacement and velocity time history.
Case one: initial mass with a −40% estimation error
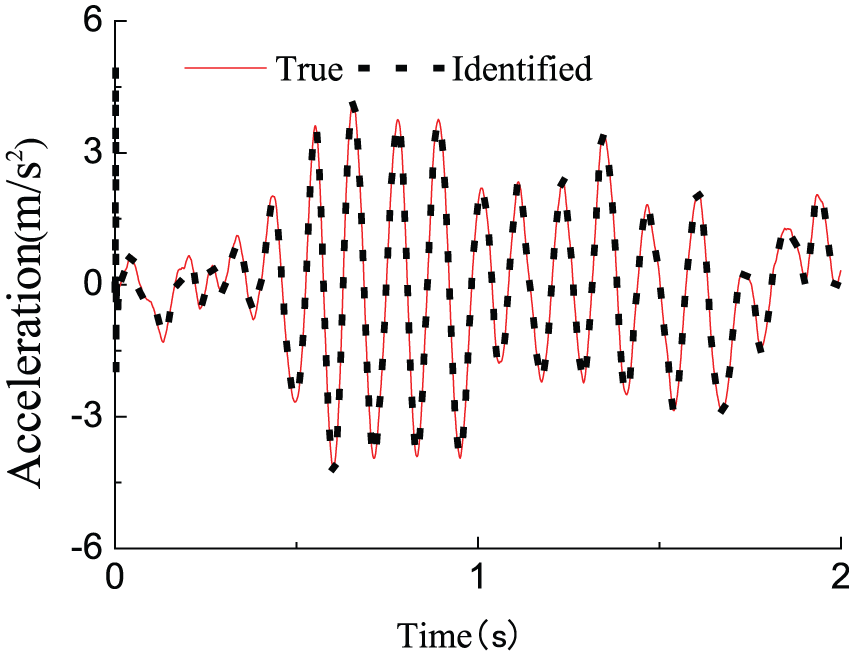
When the initial estimation of each mass is 60% of the real mass, based on the proposed method, structural mass can be identified. As the accelerations at the first, third and fourth floors were observed. The acceleration response on the second floor can be calculated by equation (31) using identified velocity responses

where
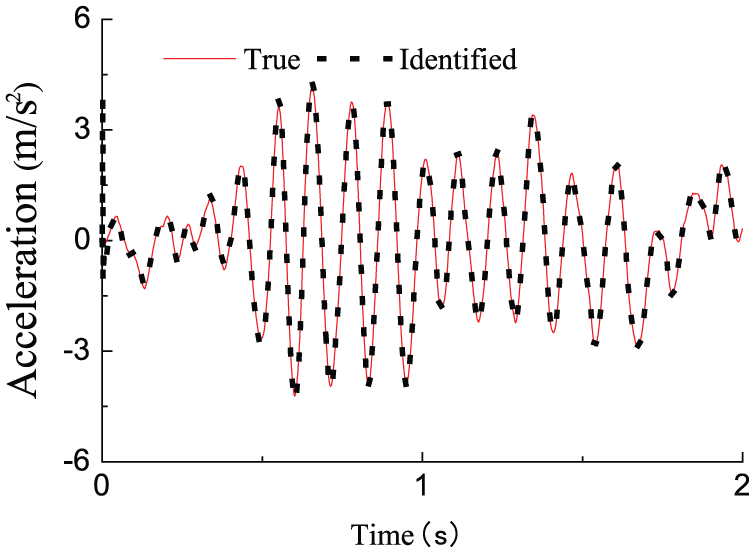
The identified acceleration compared with the true values on the second floor of the numerical model in Case one.
The identified structural mass distribution based on the UKF method is that m1 = 393.1 kg, m2 = 403.5 kg, m3 = 396.4 kg and m4 = 394.5 kg. Compared with the true results, the identified mass results are very close to the true values. The maximum error is only 1.7% when the observed state vector is mixed with noise.
Following the identification of mass, the structural parameters of the stiffness and the damping, the structural responses of the displacement and the velocity, and the NRF were also identified.
The identified displacement and velocity responses and the corresponding true values of the structure are shown in Figures 5 and 6. The real parameters and the identified linear structure parameters of the structure are shown in Table 1. It is shown that the identified results are accurate. The results also show that the error of identified damping is higher than other parameters. And, the main reason is the damping force of the structure is relatively smaller than the restoring force provided by structural stiffness.
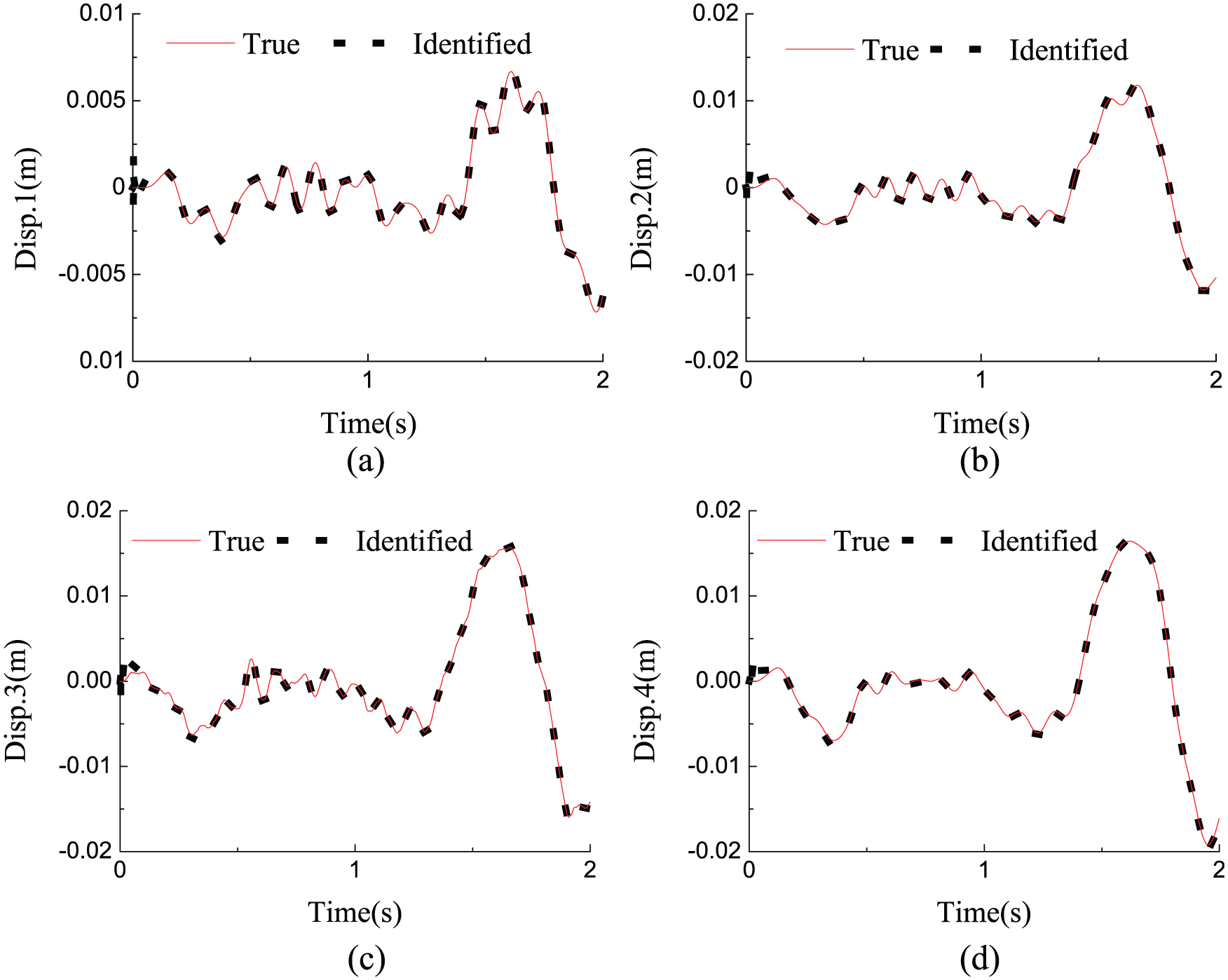
Identified structural displacement response compared with the true values of the numerical model in Case one: (a) first floor, (b) second floor, (c) third floor and (d) fourth floor.
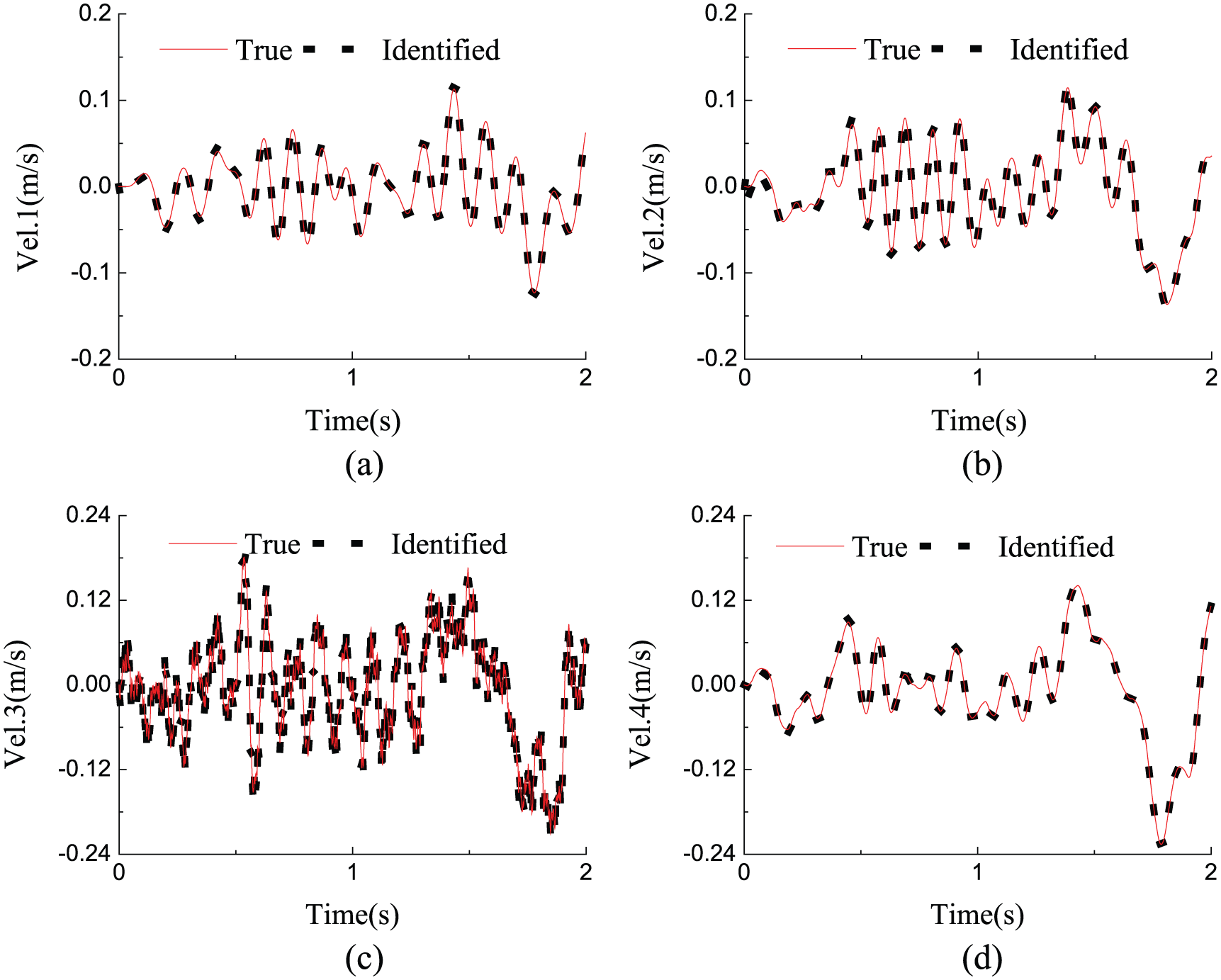
Identified structural velocity response compared with the true values of the numerical model in Case one: (a) first floor, (b) second floor, (c) third floor and (d) fourth floor.
Identified parameters of the numerical model in Case one.
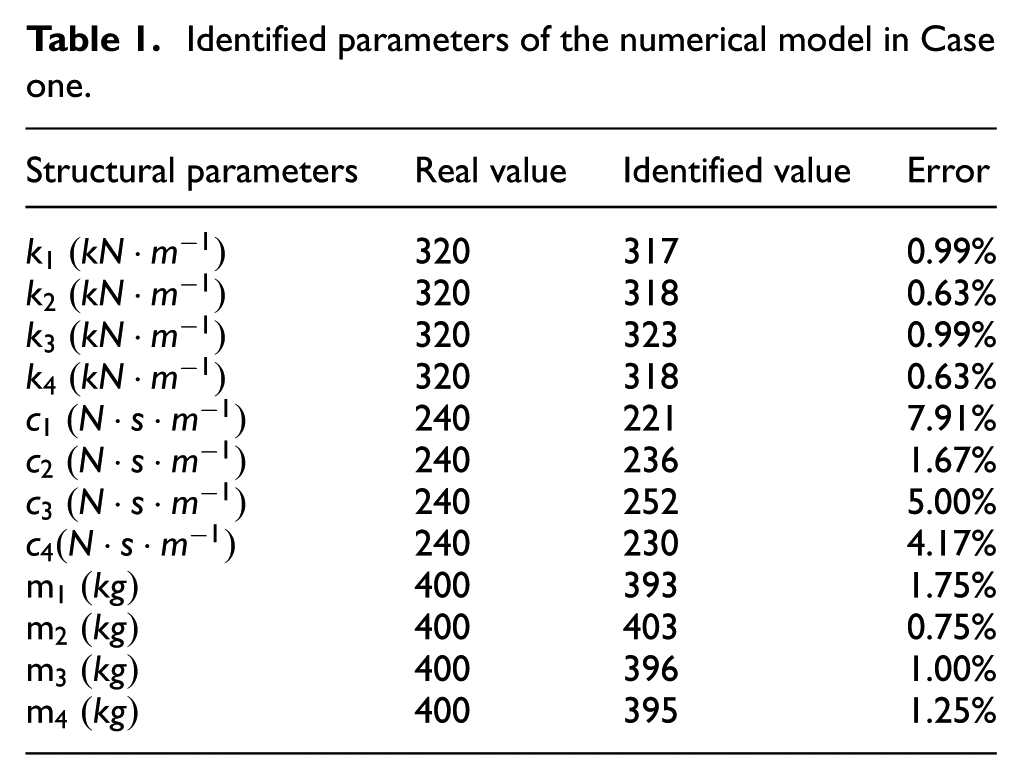
Figure 7 shows the comparison of the identified MR damping force with the theoretical value. The results show that the NRF identification method based on the MF-EKF-WGI, UKF and Chebyshev polynomial model can effectively identify the NRF of MDOF structure using limited acceleration measurement of the structure.
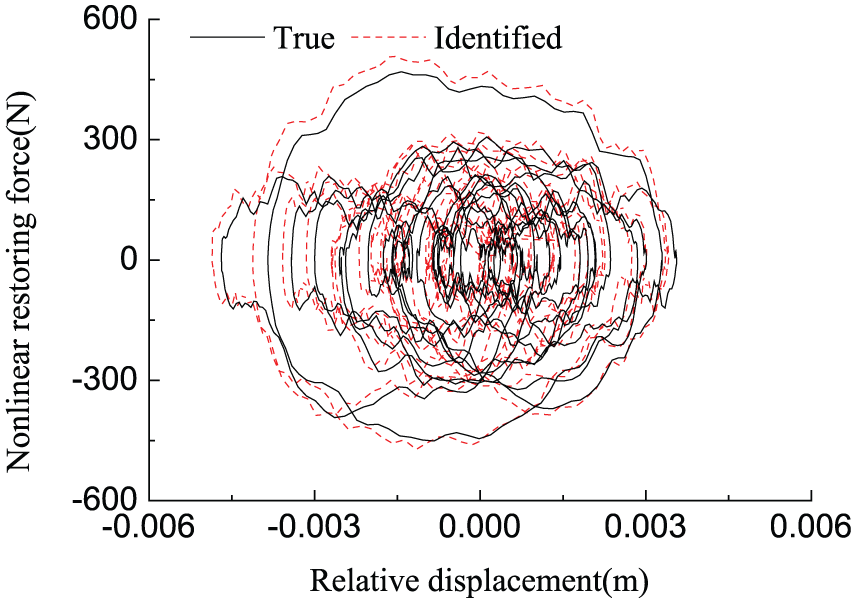
Identified MR damper restoring force compared with the true values of the numerical structure in Case one.
Case two: initial mass with a +40% estimation error
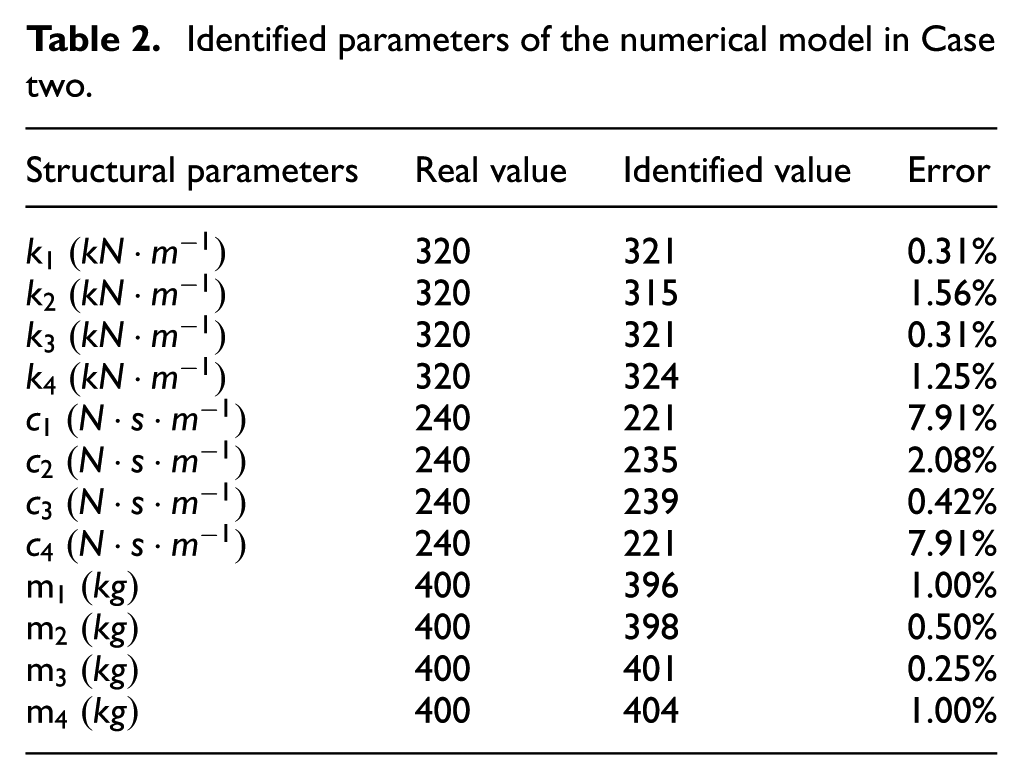
In this case, the initial estimation of the mass of the structure is 140% of its real mass. Identical excitation shown in Figure 3 is employed. Based on the proposed approach, the identified masses are m1 = 396 kg, m2 = 398 kg, m3 = 401 kg and m4 = 404 kg. Compared with the true results and the identified results, the maximum error is 1.3%. The comparison between the real and the identified acceleration on the second floor are shown in Figure 8. The MR damper force identification result compared with the true value is shown in Figure 9.
The identified acceleration compared with the true values on the second floor of the numerical model in Case two.
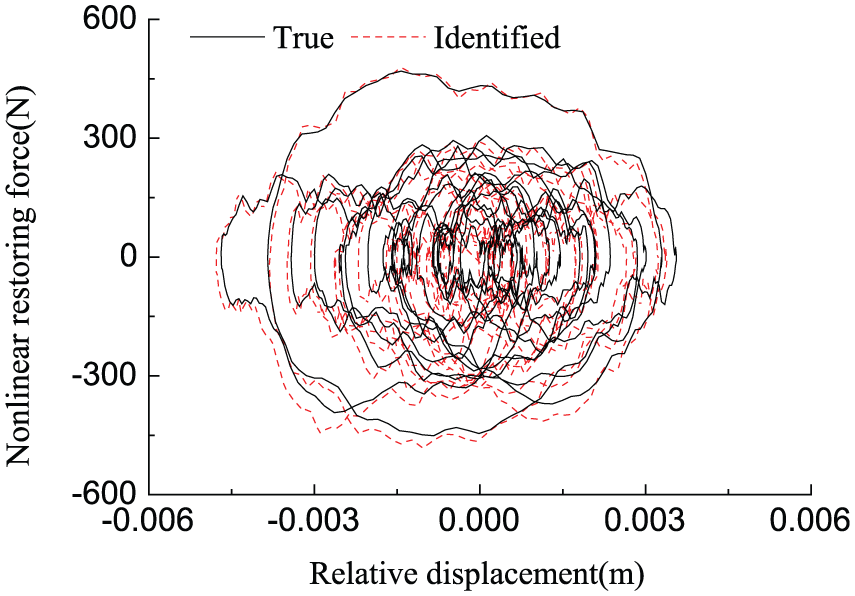
Identified MR damper restoring force compared with the true values of the numerical structure in Case two.
The identified and the true response of the displacement and the velocity of the structure are shown in Figures 10 and 11. The linear structural parameters of stiffness, mass and damping are shown in Table 2. The mass and stiffness identification results have a maximum relative error within 2%, and the maximum relative error for damping coefficients is relative higher.
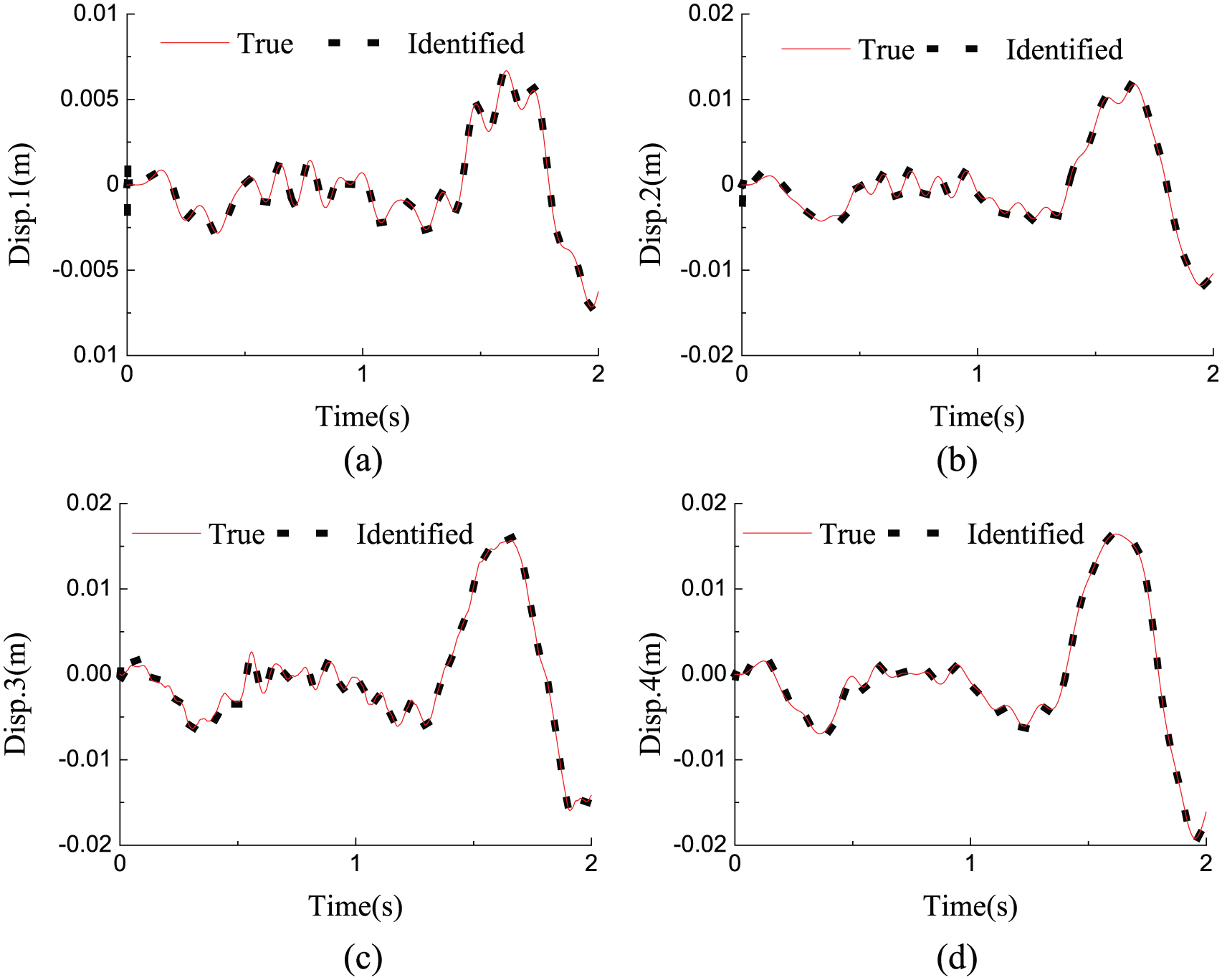
Identified structural displacement response compared with the true values of the numerical model in Case two: (a) first floor, (b) second floor, (c) third floor and (d) fourth floor.
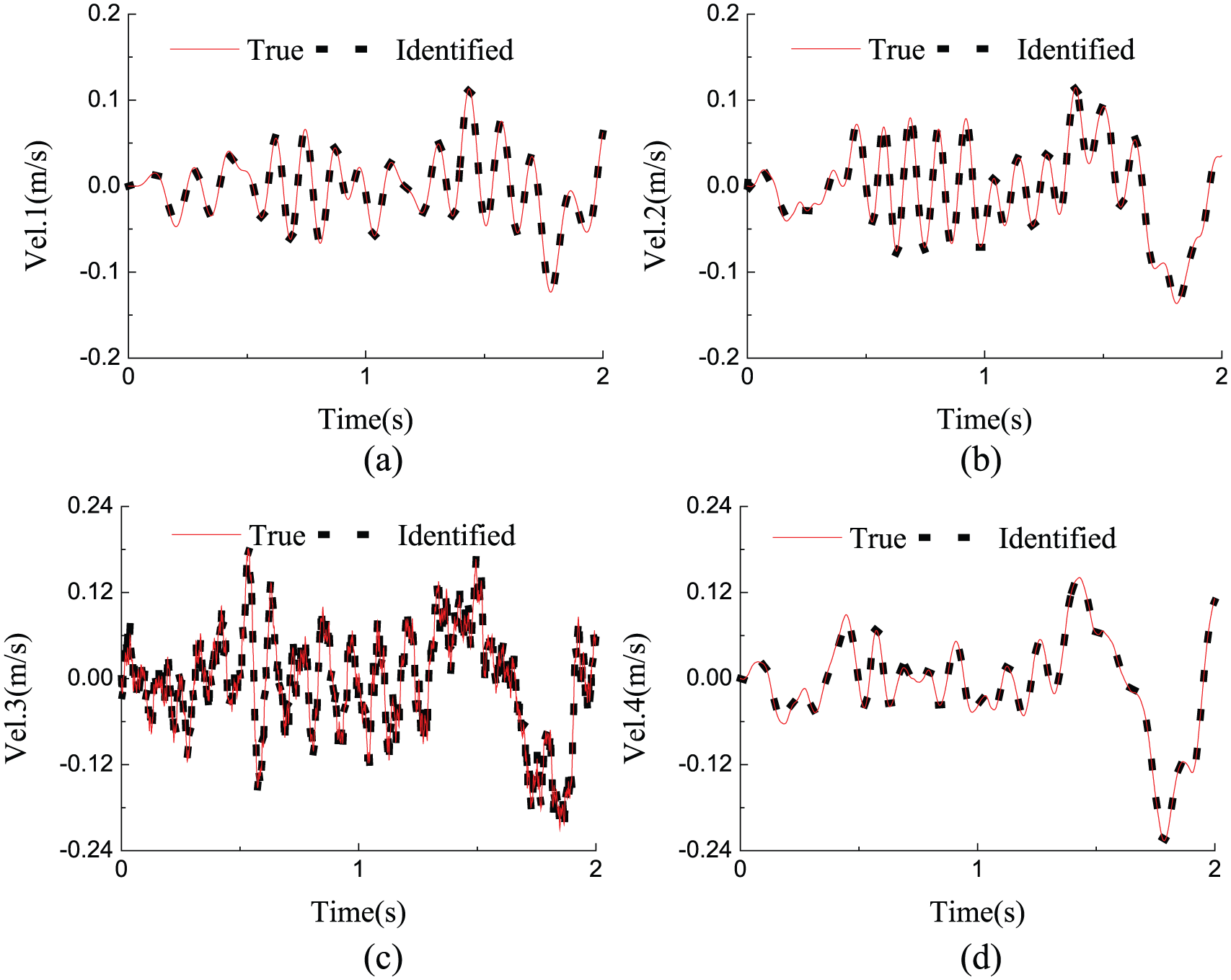
Identified structural velocity response compared with the true values of the numerical model in Case two: (a) first floor, (b) second floor, (c) third floor and (d) fourth floor.
Identified parameters of the numerical model in Case two.
Experimental validation with a four-storey frame model with MR dampers
Nonlinear model structure and dynamic test
A dynamic test is carried out on a four-storey steel frame building model structure as shown in Figure 12. Two actively controlled MR dampers are installed on the fourth floor of the model structure. The steel structure is 0.3 m × 0.4 m in plain and 1.2 m in height, and the height distributed in four evenly. The cross section of the column is 30 mm × 5 mm, and the thickness of the floor plate is 10 mm. All joints are connected using bolts. The weights of the structural components are measured and the lumped masses of first, second and third floors are 12.95 kg, while the mass of the fourth floor is 12.56 kg.
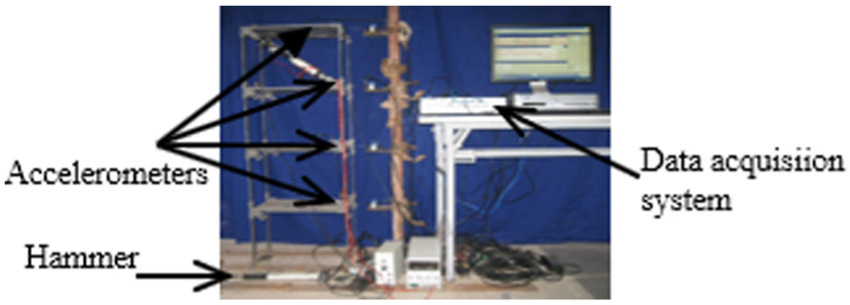
Nonlinear model structure and data acquisition system.
An impact hammer is employed to excite the third floor of the model structure only, and the excitation force was measured directly by a piezoelectric force gauge in the hammer. The corresponding acceleration responses of the four storeys are measured directly by four accelerometers. But only acceleration responses on the first, second and third floors are used to identify the structural parameters and the displacement, velocity responses, respectively. The second-floor acceleration response is treated as unknown and is identified. The excitation force, the two MR dampers forces and the displacement and acceleration responses are recorded simultaneously with a sampling frequency of 1024 Hz. The displacement response on each floor and the acceleration response measurement on the second floor are not used for identification and are used for comparison with the identified results by the proposed approach. To mitigate the effect of measurement noise, a high-pass filter with a pass frequency of 1 Hz is employed to process the acceleration measurements. The time history of impact excitation force applied on the third floor is shown in Figure 13, and the measured acceleration time history on the first, the third and the fourth floors of the model structure to be used for the identification is shown in Figure 14.
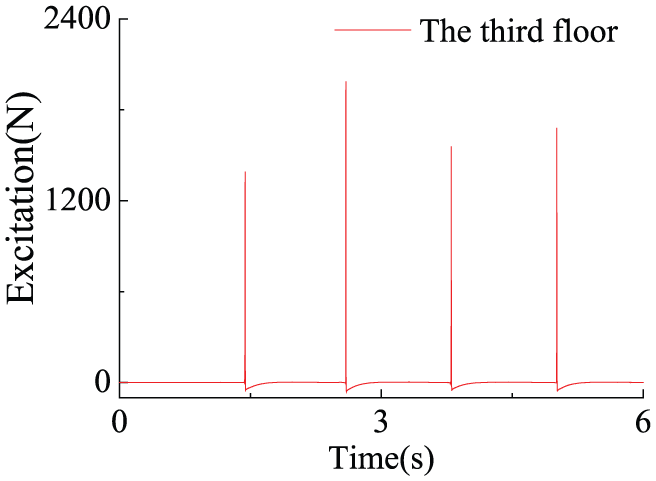
Excitation force time history on the third floor.
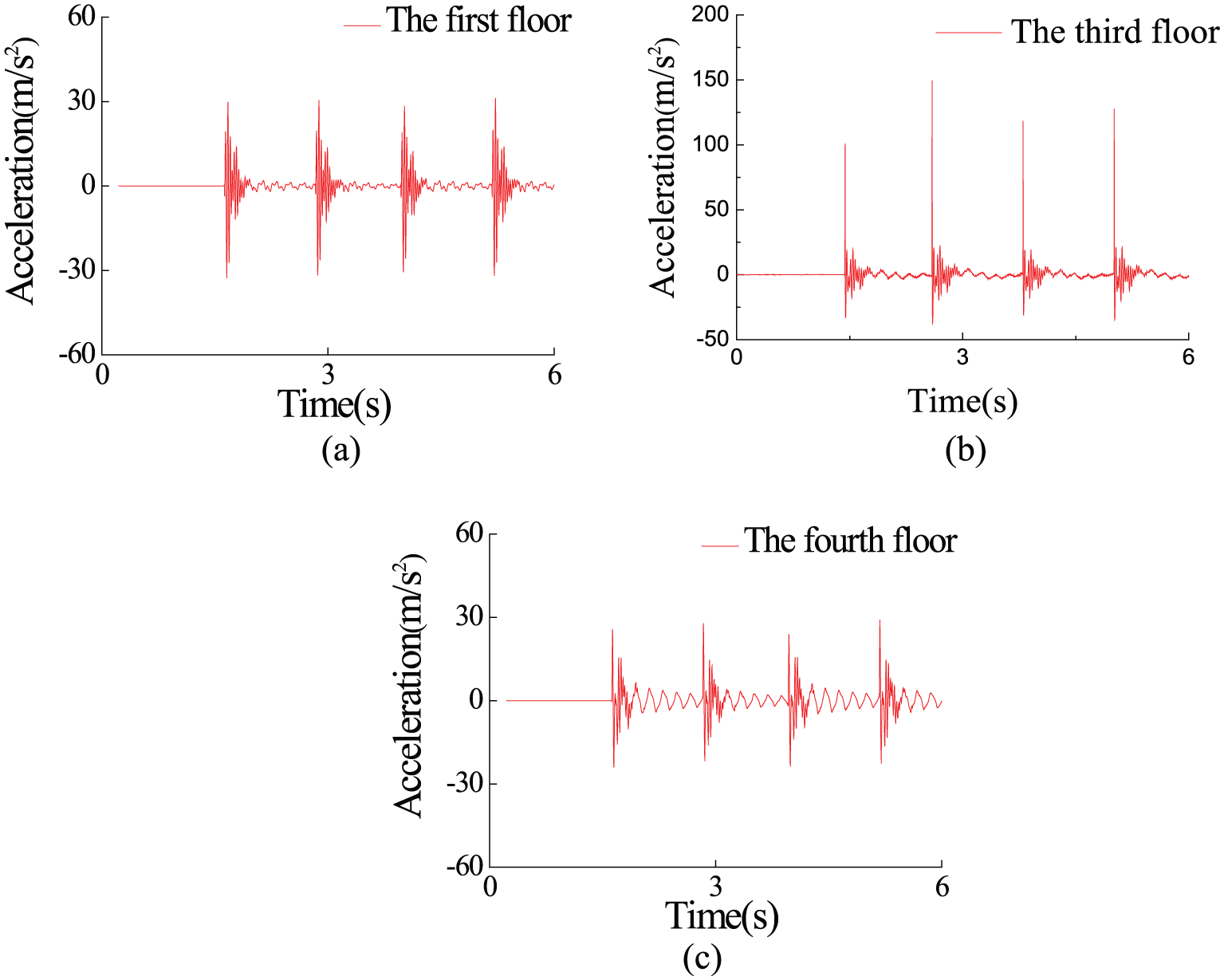
The measured acceleration response measurements of the model structure: (a) first floor, (b) third floor and (c) fourth floor.
Based on the UKF and the Chebyshev polynomial model, the identified mass distribution is that m1 = 13.08 kg, m2 = 12.77 kg, m3 = 13.12 kg and m4 =12.89 kg and the maximum error is 2.63%. After identification mass, the structural parameters of the stiffness and the damping, the structural responses of the displacement and the velocity were also identified. The comparison of the identified displacement response time history with the measurement is shown in Figure 15.
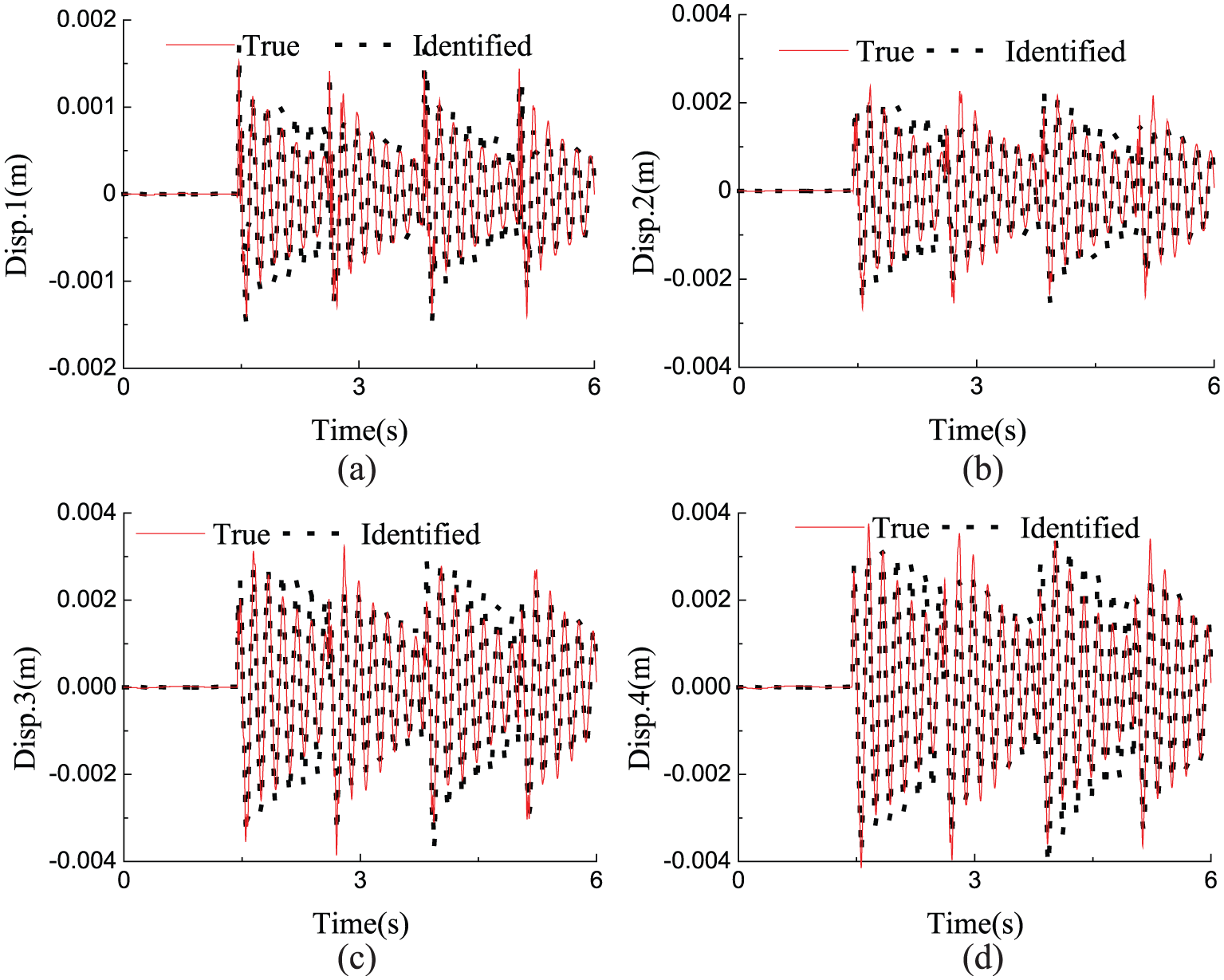
Identified structural displacement response compared with the measurement of the model structure: (a) first floor, (b) second floor, (c) third floor and (d) fourth floor.
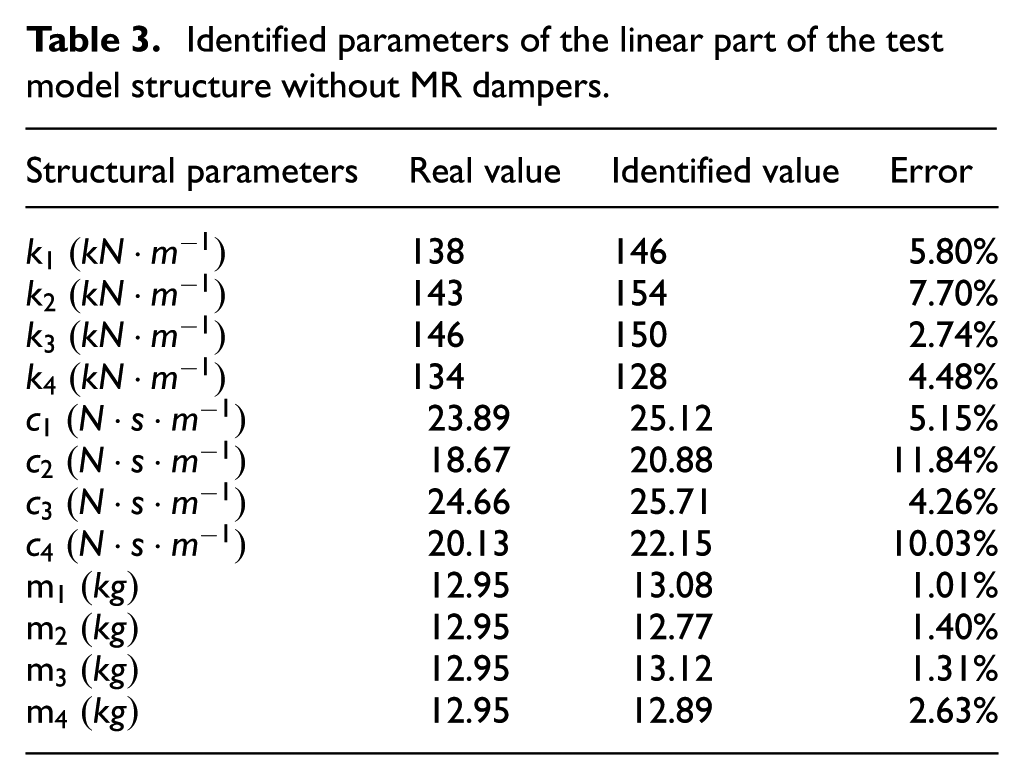
The real parameter values and the identified parameters of the linear part of the structure without MR dampers are shown in Table 3. It is clear that the identified mass has the highest identification accuracy with a maximum relative error of 2.63%. The stiffness and damping coefficients have maximum relative identification errors of 5.8% and 11.84%. The relative errors of identification results in the test are relatively higher than them in the numerical simulation. The modelling error and noise in acceleration response measurements might be the main reasons. Moreover, the identification error of damping is higher than that of stiffness because the damping force is relative smaller than the restoring force provided by structure stiffness.
Identified parameters of the linear part of the test model structure without MR dampers.
Following the identification of the unmeasured velocity and displacement response and the parameters of the linear part of the model structure without MR dampers, the acceleration on the second floor is identified and compared with the measurement as shown in Figure 16.
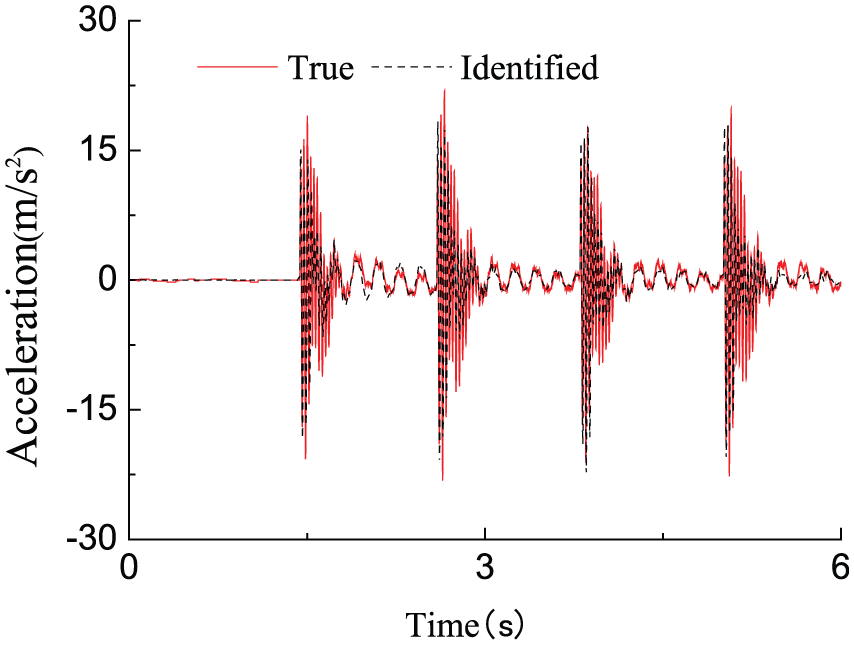
The identified acceleration compared with the measurement on the second floor of the model structure.
The comparison of the identified MR damper force with the measurement is shown in Figure 17. Because the frame structure is modelled as a 4-DOF structure and each floor of the structure has a horizontal DOF, the identified NRF is the restoring force in horizontal direction. The MR force shown in Figure 17 is the horizontal component of the MR measurement. It is clear that the proposed approach can identify the hysteretic behaviour of the model structure provided by MR damper during vibration. As the hysteretic behaviour of structure member tested under cyclic loadings provides a direct description on the initiation and development of structural damage, which is helpful for the remaining load-carrying capacity estimation, the NRF identification approach proposed in this study is meaningful for the remaining load-carrying capacity estimation of engineering structures and for the quantitative energy consumption under dynamic loadings.
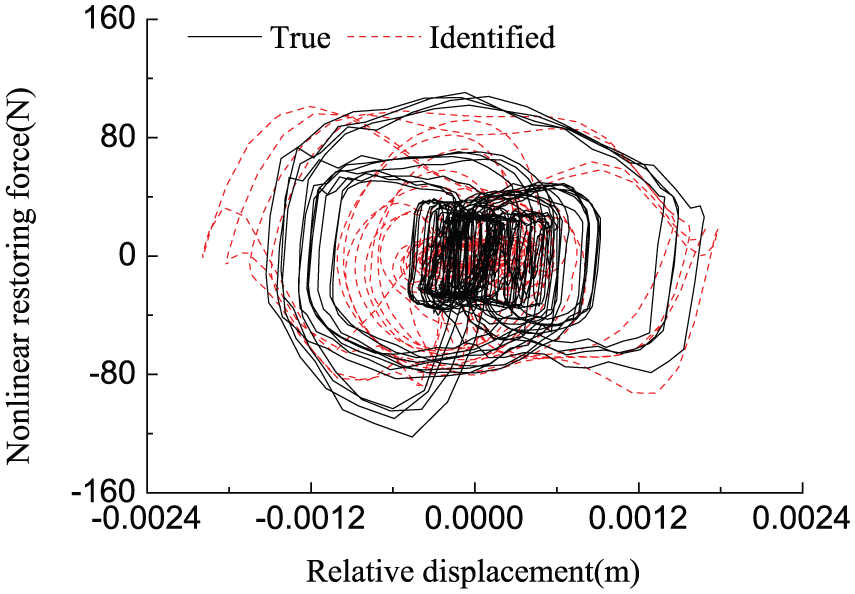
Identified MR damper restoring force.
Concluding remarks
In this study, a time-domain structural NRF and mass identification approach for MDOF structures under incomplete excitation using limited acceleration measurements but without using any parametric models of structural NRF is proposed based on the MF-EKF-WGI, UKF and a double Chebyshev polynomial model. The performance of the proposed approach is studied numerically and experimentally. The following conclusions can be made:
Numerical simulation results on a four-storey numerical shear model structure with an MR damper show that the unmeasured acceleration, the NRF and mass of the structure can be identified with acceptable accuracy even the initial values of mass have a ±40% estimation error. Moreover, the proposed approach is robust to the measurement noise.
Experimental study with a four-storey steel frame structure equipped with two actively controlled MR dampers on the top floor, which are employed to provide a NRF in the system with unknown mathematical model, was carried out to validate this approach. The identified NRF and unmeasured structural responses are compared with the test measurements and the results are acceptable.
Different from the identification approaches aiming at identifying parameters of an assumed parametric nonlinear model, the proposed method in this study is based on a nonparametric model and uses limited acceleration measurements at certain DOFs with masses as unknowns. In order to eliminate the number of unknowns in the double Chebyshev polynomial model, the location of nonlinearity is identified at first. The proposed approach is potential for structural nonlinearity identification, which plays key roles in post-event damage prognosis of engineering structures, where the remaining load-carrying capacity forecasting is important. Further studies include the validation of the proposed approach for structures with different nonlinearity behaviours.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This study was supported by the National Natural Science Foundation of China (NSFC) under Grant No. 50978092 and the Scientific Research Funds of Huaqiao University awarded to the first author.