
Abstract
Uncertainty results in misestimate of the shear resistance of unreinforced masonry walls. The misestimate is difficult to correct using deterministic calculation models even when sophisticated numerical models are used. To address this issue, the authors converted the deterministic calculation models for shear resistance of unreinforced masonry walls into prior Gaussian process models and then collected experimental results to train the prior Gaussian process models. They evaluated the resultant posterior Gaussian process models and found two of them are preferable. The two favorable posterior Gaussian process models can well interpolate the collected experimental results and can predict the shear resistance of the unreinforced masonry walls in the authors’ experiments with full information. The interpolation and predication demonstrate that the posterior Gaussian process models can combine and weight prior engineering judgments and observational information from experimental results and then can quantitatively specify the remaining uncertainty of the estimation. In addition, the Gaussian process models are efficient, favorable for reliability analysis, and easily improvable. Therefore, they are potentially useful in engineering practices.
Introduction
Unreinforced masonry (URM) walls are principal structural elements in masonry structures that have been widely used around the world. An appropriate estimation of the walls’ resistance is critical for safety assessment of the masonry structures, and for potential strengthening design of them. Most URM walls are supposed to resist shear force under vertical compression. Therefore, shear resistance estimation for URM walls under compression is essential and has attracted considerable research attention in decades (Binda et al., 1991; Dhanasekar et al., 1985; Mazzotti et al., 2014; Page et al., 1980; Shing et al., 1990; Zhu et al., 1980).
Extensive physical experiments have revealed that the URM walls’ shear failure is subject to a wide range of parameters, and it can happen in different modes. Some influential parameters are difficult—if not impossible—to quantify comprehensively (Sutcliffe et al., 2001; Tomaževič et al., 1996). Therefore, to estimate the shear resistance deterministically is difficult. The URM walls are highly heterogeneous, because the units and the mortar have different mechanical properties and they combine in different bricklaying patterns (Grimm, 1988; Mojsilović and Stewart, 2015). The heterogeneity results in unpredictable orientation of principal stresses with respect to bed mortar joints and then causes uncertain damages of the unit–mortar interfaces (Vasconcelos and Lourenço, 2009). Moreover, the units and the mortar joints decay at different paces. Deficiencies can randomly arise within them or at their interfaces during use. These deficiencies irregularly impair the URM and reduce the URM walls’ shear resistance in a random way (Gentilini et al., 2015). There are experimental results show that the URM walls are not perfectly elastic even in the range of small deformation (Sutcliffe et al., 2001). Under coupling interaction of shear and flexure mechanism, the walls may fail in diagonal shear mode, rocking modes with toe crushing, flexure modes with toe crushing, sliding mode, or mixed modes, displaying very different resistance (Shing et al., 1990). All the failure modes are brittle, especially when the vertical compression is high, and then to measure the resistance exactly is not easy (Konthesingha et al., 2013; Mojsilović et al., 2010). Loading pattern and boundary conditions also have significant impacts on the shear resistance of the URM walls (Gams et al., 2017; Tomaževič et al., 1996). For example, the repeated compressive loading can cause significant reduction in resistance (Nazar and Sinha, 2007a). In addition, the URM walls’ shear resistance is influenced by some retrofitting measurements, like grouting or mortar joint reinforcement (Bolhassani et al., 2016; Schultz et al., 1998). The extensive experimental results indicate that the shear resistance is far from deterministic: the coefficient of variation (COV) of the experimental results for mechanical properties of URM can be higher than 0.25 (GB50003-2011, 2011). The shear resistance estimation under such a high variation could be unreliable. To reveal the shear failure mechanism underlying the huge volume of experimental results, extensive study has been focused on resistance calculation models for URM walls, including numerical models and analytical models.
The numerical models attempt to represent the walls’ failure mechanism comprehensively. They can be classified into three categories according to their level of detail, that is, microscopic models, mesoscopic models, and macroscopic models (Lourenço, 1996; Roca et al., 2010). The microscopic models treat the units, the mortar, and the unit–mortar interfaces separately and then calculate the walls’ responses under different loading cases (Lourenço, 2010). They are often complicated because different elements have to be combined (Kalliontzis and Schultz, 2017). The mortar joints can be simulated by interface elements that represent bonding and frictional contact (Snozzi and Molinari, 2013); the units can be simulated using solid elements that dynamically interact with each other through collision (Lemos, 2007). The detailed microscopic models require a careful—but potentially subjective—selection of material models and many input parameters (Calderón et al., 2017), and they take much computational time to capture the development of intrinsic damages in the URM. During their calculation, high local stresses and stress gradients often result in divergence (Ali and Page, 1989). The explicit method can be used to address the divergence issue, but it might take much more computational time (Noor-E-Khuda and Dhanasekar, 2018).
The mesoscopic models homogenize the URM into continuum and then calculate the URM walls’ resistance (Lourenço et al., 2007). Direct mesoscopic strategy is only appropriate under very small loads because it neglects the heterogeneity and existing damages in the URM (Peralta et al., 2016). To appropriately homogenize the URM, displacement boundaries should be applied on a representative volume element (RVE) consisting of units and mortar, and then equivalent overall material properties should be determined by integrating stresses and strains responses over the RVE (Ma et al., 2001). For the homogenized URM, different failure criteria can be imposed, including the Hill–Rankine criteria (Janaraj and Dhanasekar, 2014), the Mohr–Coulomb criteria (Bruggi and Milani, 2015), and the Drucker–Prager criteria (Köksal et al., 2013). Under cyclic loading, stress–strain curves of the homogenized URM can be represented by normalized polynomial functions (Nazar and Sinha, 2007b). However, to justify the calculation results of the mesoscopic models, parameters of the failure criteria and stress–strain curves might have to be adjusted subjectively (Orduña and Lourenço, 2003).
The macroscopic models treat the URM walls or their portions as super elements. The super elements can be regarded as rigid, and the nonlinearity deformation is concentrated in predefined contact regions around them (Costa et al., 2015). The nonlinearity deformation can also be represented by normal springs and shear spring connecting the super rigid elements, and the mechanical characteristics of the springs are defined considering the mechanical properties of mortar (Peng et al., 2018). The macroscopic models can simulate the extreme responses of masonry structures, including buckling and collapse (Casolo, 2004). However, they are more effective in simulating the global responses of the structures under dynamic inputs, than in simulating the local responses within an URM wall under static loads (D’Ayala and Shi, 2011).
In general, the numerical models require much time for modeling and calculation. They resort to different elements, solution procedures, constitutive laws, and failure criteria (Costa et al., 2015; Nazar and Sinha, 2007b). For the complicated constitutive laws and failure criteria, not all parameters have clear physical meanings, and some of these parameters are difficult to measure (Tomaževič and Weiss, 2010). Moreover, the mechanical parameters of the URM vary from wall to wall, and the parameters set for any specific constitutive laws and failure criteria will not generally be appropriate. Therefore, the numerical models that heavily depend on the parameters introduce uncertainty into their calculation results potentially.
As an alternative to the sophisticated numerical models, the analytical models proposed in design codes have simple forms, and they ensure the safety of the URM walls with considerable margin (ACI 530-05, 2005; EN 1996/Eurocode 6, 2005; GB50003-2011, 2011; Theodossopoulos and Sinha, 2013). They are efficient because they impose strong simplifications on mechanical parameters and failure modes. However, the simplifications make them less flexible than the numerical models in representing different failure mechanisms (Brunner and Shing, 1996) and less accurate in terms of the agreement between their results and the experimental results (Haach et al., 2013; Tomaževič, 2009). The analytical models are often biased because their parameters are conservatively chosen to ensure the safety margin (Schultz et al., 1998). In some circumstances, the strength of URM is set to be half or less of the experimental average (GB50003-2011, 2011; Hendry, 1982). Such a high reduction neutralizes the efforts to optimize the calculation models, and it could mislead the structural assessment, reliability analysis, and maintenance of the target URM walls (Haukaas et al., 2011).
The shear resistance estimation for URM walls has not been well addressed with the extensive experimental results and the available calculation models. The calculation models hardly reproduce the experimental results systematically without repeated adjustment of the input parameters (Sui, 2007; Torres et al., 2017), and they cannot systematically evaluate the differences between their results and the experimental results (Haukaas et al., 2011). Consequently, either overestimation of the resistance that leads to insufficiently interventions and inadmissible risks, or underestimation of the resistance that leads to over-strengthening or unnecessary loss, can happen. The reason for these issues is the conflict between the uncertain nature of the shear failure and the deterministic forms of the calculation models (Atamturktur et al., 2012). The uncertainty has been acknowledged and some counter measures have been proposed. For example, Eurocode 8 introduces a confidence factor (CF) to represent the influence of model uncertainties (Rota et al., 2014). Its value depends on the knowledge level (KL) obtained on the geometry, on the structural details, and the mechanical characteristics of the materials (Clementi et al., 2016).
Both parameter uncertainty and model uncertainty exist in the estimation of the shear resistance of the URM walls. The parameter uncertainty results from the significant aleatory randomness of the mechanical properties of the heterogeneous URM, and also from the observational error in the experimental results. Such strong uncertainty makes it unjustified to estimate the parameters on the basis of simple statistical moments over the limit observational samples (Ang and Tang, 1975). The shear resistance estimation relying on the insufficiently evaluated parameters could be unreliable (Dymiotis and Gutlederer, 2002; Ellingwood, 1981). The mechanical parameters of masonry are not only uncertain but also correlated with each other. For example, a variety of the geometry of the units results in a mismatch between the units and their surrounding mortar joints. This mismatch leads to complicated stress states in the URM and then uncertainly impairs the strength. A lack of information about the correlations among the mechanical parameters introduces even more severe uncertainty. Therefore, we might have to estimate the shear resistance of URM walls with the significant parameter uncertainty.
Besides, there is the model uncertainty that results from the imperfections of the calculation models. Influenced by the uncertain and correlated parameters, the shear failure of the URM walls under compression is a very complicated procedure. To predict the failure mode of a wall before loading—and then to choose a specific resistance calculation model in advance—is not realistic because of the strong uncertainty. Meanwhile, a generally accepted calculation model that can comprehensively represent all uncertain parameters and the complicated failure mechanisms has not been developed yet. As a result, both the numerical models and the analytical models have to represent the real URM walls in idealized or simplified ways. To achieve such idealization, the former ignore some influential parameters and the latter assume particular failure mechanisms. They are all biased because of the idealizations. Therefore, we might have to estimate the shear resistance of URM walls, even we cannot represent the shear failure procedure correctly.
We face the uncertainty as a major issue in shear resistance estimation for the URM walls, also in appropriate strengthening design for the walls (Colonna et al., 2017; Como, 2014). This issue can be addressed by explicitly accounting for the uncertainty, through modeling the shear resistance as a stochastic process over the uncertain parameters and models (Soize, 2013). The Gaussian process (GP) model and the artificial neural network (ANN) are effective in doing so. The two methods are popular in the field of machine learning, and they have strong relations and could potentially give similar results (Neal, 1996). It has been reported that the ANN can effectively reproduce experimental results for shear resistance of grouted reinforced concrete masonry walls (Zhou et al., 2017). The GP model is simpler and more transparent than the ANN (Rasmussen and Williams, 2006). Using the GP model, we can use plausible calculation models as priors to represent the engineering judgments and then use available experimental results to train the priors. The resultant posterior GP models retain the engineering judgments from the priors and use them to avoid relying completely on the scattered experimental results with inherent errors. This feature potentially relieves the parameter uncertainty. Meanwhile, the GP models represent the engineering judgments just vaguely and let the experimental results “speak” sufficiently for themselves. Thus, they relieve the bias of the priors and then relieve the model uncertainty. The GP models automatically combine and weight the engineering judgments from the priors and the observational information from the experimental results. They provide estimation with complete information and can quantitatively specify the remaining uncertainty.
Unlike the numerical or analytical models, the GP models define a purely mathematical relationship between the inputs and the outputs while disregarding the involved physics. They do not have divergence issues or heavy time burdens. Therefore, they can be efficient surrogates to the numerical or analytical models (Atamturktur et al., 2012). More importantly, they allow us to estimate starting from a biased prior model that is not mechanically sound. The situation happens in many real-world practices, because our knowledge of the parameters, the real states, and the failure mechanism of the target masonry walls is vague generally.
In this study, we converted the deterministic shear resistance models of URM walls into prior GP models, and then trained and updated the prior GP models based on available experimental results. We estimated the shear resistance of URM walls using the updated GP models and then verified the estimation. The rest of this article is organized as follows. In section “Experimental results and calculation models for shear resistance of URM walls,” we collect experimental results and introduce three deterministic calculation models for shear resistance of URM walls. In section “GP models for shear resistance of URM walls,” we explain the GP modeling procedure that uses the deterministic calculation models as priors. In section “Shear resistance estimation based on the GP models,” we establish GP models for shear resistance of URM walls, train the GP models using the collected experimental results, and then verify their interpolation and predication ability. In section “Conclusion,” we summarize the research findings and point out the potentials of the GP models in engineering practices.
Experimental results and calculation models for shear resistance of URM walls
Experimental results
The extensive physical experiments for shear resistance of URM walls have accumulated a huge volume of results. These results were obtained under different conditions and they are significantly scattered. Their inherent uncertainty should be addressed before they can be used in the estimation of the shear resistance.
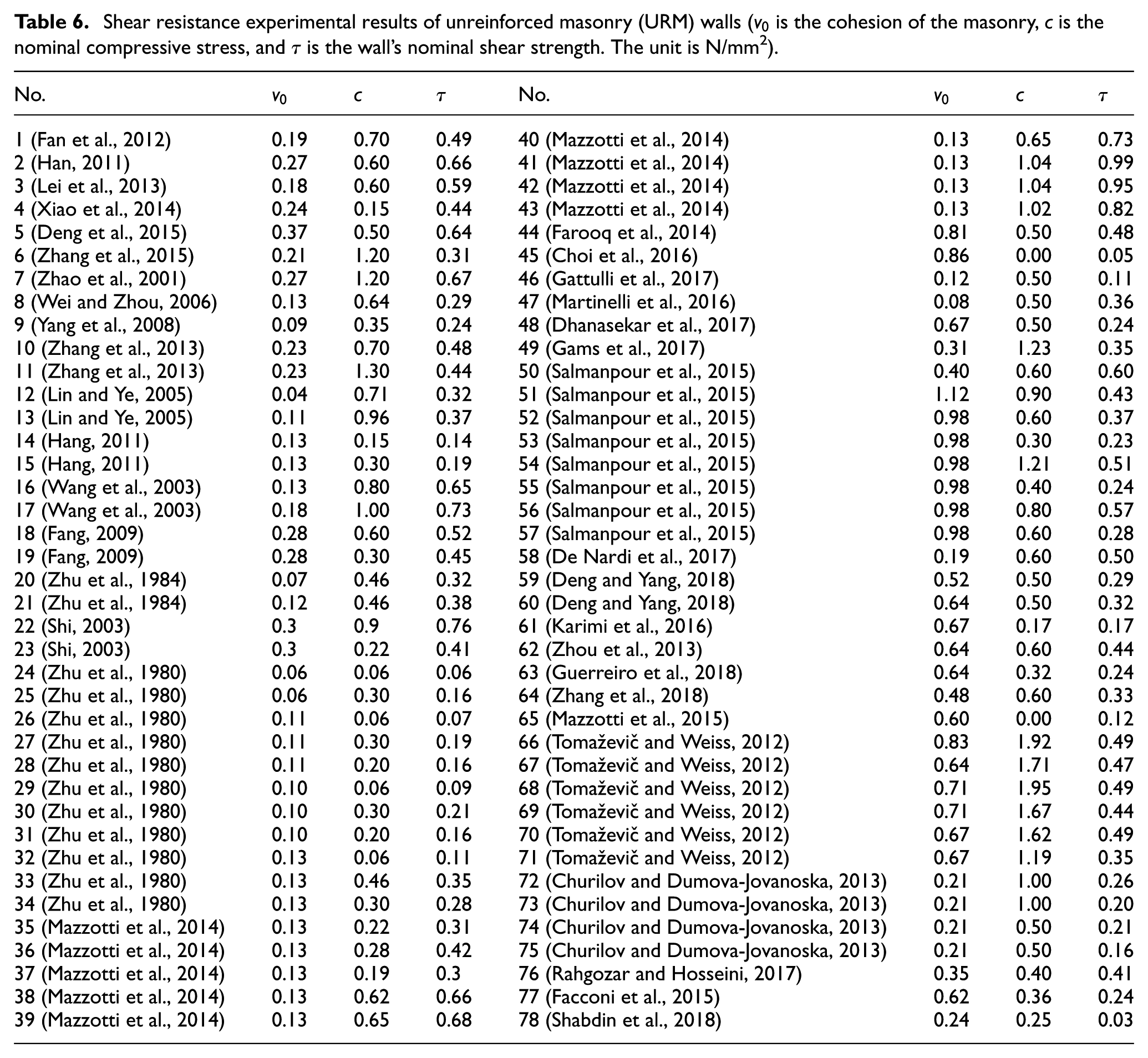
We collected 78 sets of experimental results from literature, as shown in Appendix 1. To reduce potential bias caused by the difference in material properties, only the results for brick URM walls were collected. Some values in Appendix 1 were converted from the original parameters in the literature.
Although the collected results are not complete, they can be used to explain the GP modeling and estimation procedure. Other experimental results can be incorporated easily following the same procedure.
Calculation models
Although deterministic calculation models for shear resistance of URM walls do not explicitly account for the uncertainty, they convey important engineering judgments. Therefore, they contribute to relieve the uncertainty. We resort to three typical models as follows, which are widely used in real-world practices.
The first model is based on the Mohr–Coulomb failure criteria, and it specifies the shear resistance as a linear function of the cohesion and the vertical compressive force. The general form of the model is (GB50003-2011, 2011; Tomaževič, 2009)

where
In most practices, the cross-sectional area A can be well measured. Taking A to be deterministic and then dividing the two sides of the above equation by it, we obtain the following equation

where
The second model is based on the maximum tensile stress theory, and it specifies the nominal shear strength as a nonlinear function of the cohesion and the nominal compressive stress. The general form of the model is as follows

The two above-mentioned models are applicable directly for ideal elastoplastic materials. For URM, calibration parameters have to be used to fit the models to experimental results. Then, the models become

and

where α and β are the calibration parameters. Equation (1) is recommended by many design codes because of its simplicity, and thus, stability.
Most URM walls have irregular cracks that are difficult to model. To avoid the theoretical difficulty, we can establish the shear resistance model by a direct linear regression of enough shear–compression experimental results. Taking the low masonry cohesion as a constant, the regression leads to another simple model. The general form of the model is (ACI 530-05, 2005)

With different sets of calibration parameters, the above-mentioned models are considerably different from each other. Moreover, other plausible models that are not in the forms of equations (1) to (3) exist. The different models are not interchangeable because they refer to different failure mechanisms. However, when estimating the URM walls’ resistance in real-world practices, it is difficult to predict the failure mechanism of the target wall, and then it is difficult to choose a sound equation in advance. Using biased equations is not mechanically sound, but the situation happens. This is a source of uncertainty.
The bias can be relieved by trying to use models that are as appropriate as possible. However, the bias cannot be eliminated. If sophisticated numerical models were used, the relief of the bias might come with time burdens, potential divergence issues, and truncation errors in calculation. The errors add to the uncertainty when they accumulate through the iterative calculation procedures. Therefore, careful choosing or deliberate improvement of the deterministic models cannot address the uncertainty issue. We often estimate the shear resistance starting with the biased models.
To account for the uncertainty in the parameters and the models explicitly, we modeled the shear resistance as a stochastic process and converted the above-mentioned deterministic models into GP models, as discussed in the next section.
GP models for shear resistance of URM walls
A GP model describes a probability distribution over functions. It can specify the uncertain relationship between the output nominal shear strength
Prior models
A GP model for the shear resistance of URM walls can be expressed as follows

where
Equation (4) denotes the conversion of the deterministic models if we set the prior of the
We specified the prior covariance functions, that is, an element in

where
Equation (5) has favorable features. First, it quantitatively tells different uncertainty sources: the first term on the right side denotes the bias introduced using the prior mean functions, and the second term denotes the random observational errors. Second, it makes the model smooth: the closer the inputs, the more similar are the outputs. Along with the increase of
Using equations (1) to (5), we converted the deterministic models into stochastic GP models, which contain the calibration parameters
Training and updating of the prior models
The posterior values of calibration parameters

where
An important feature of the GP models is that the training can be triggered whenever new experimental results are available. The posterior GP models can then be further trained to incorporate more information from the new observations. To distinguish the training of the prior models and the further training of the posterior models, we refer to the latter as GP model updating.
Probability density functions of nominal shear strength
For any particular input

and we can further determine a normal probability density function (PDF) for the

The normal PDF contains full information, including the engineering judgments and their biases, observational information from the experimental results, and the random observational errors. We can use the mean or an appropriate quantile of the PDF as an estimator of the nominal shear strength, and we can determine the confidence interval of such an estimator simultaneously. These advantages are not available when using deterministic models, individual experimental result, or simple statistics over a few experimental results. We explain the estimation procedure using some instances in the next section.
Shear resistance estimation based on the GP models
GP modeling
To establish prior GP models for the nominal shear strength, we judged the prior calibration parameters
The prior parameters are listed in Table 1, and the prior GP models are illustrated in Figure 1. Figure 1 shows that the collected experimental results are very scattered. If we tried to fit the relationships between the inputs and the outputs using deterministic parametric models, the models would be very complicated and then unstable.
Prior calibration parameters and hyperparameters.

Surface of the prior mean function: (a) Model 1, (b) Model 2, and (c) Model 3.
To effectively train the prior GP models, the number of set of experimental results should be 10 times or more of that of the calibration parameters (Higdon et al., 2008). There are two calibration parameters in our prior GP models, and it needs 20 sets of experimental results at least. We used the 78 sets of experimental results in Appendix 1.
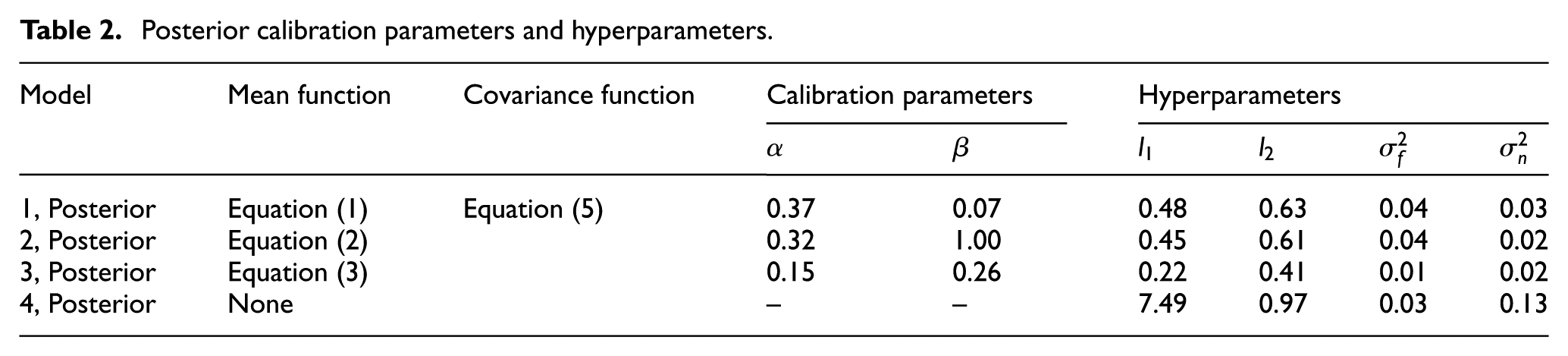
We established the log likelihood following equation (6) and then maximized the log likelihood using the conjugate gradient method (Rasmussen and Williams, 2006). There was no divergence issue or heavy time burden in the procedure. The resultant posterior parameters are listed in Table 2. They determine the posterior GP models.
Posterior calibration parameters and hyperparameters.
Interpolation based on the posterior GP models
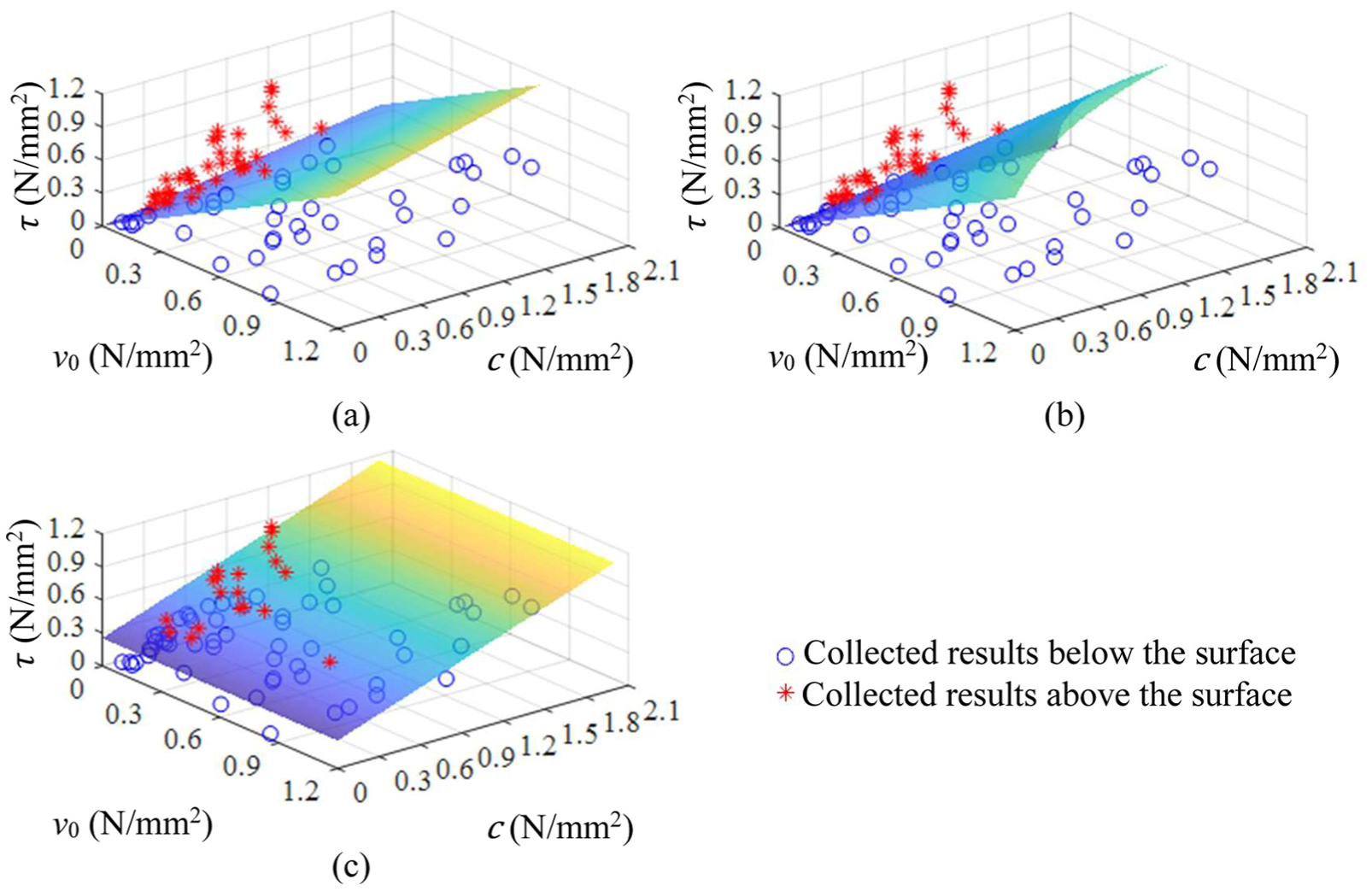
We illustrate the posterior GP models in Figure 2. The posteriors GP models correct the bias of the prior models using the collected experimental results: the posterior mean functions of model 1 and model 3 become nonlinear, although their priors are linear. Through the correction, all the posterior mean functions show the nominal shear strength decreases with the increase of nominal compressive stress when such stress is high. The decrease is reasonable but the prior mean functions have not pointed out. In the posterior models, the decrease is due to the importance given to the covariance matrix, which is determined by the collected experimental results. It can be seen that the experimental results contribute significant information to correct the prior models without mechanical analysis.

Surface of the posterior mean function: (a) Model 1, (b) Model 2, (c) Model 3, and (d) Model 4.
Reciprocally, the posteriors GP models relieve the uncertainty of the scattered experimental results using the prior mean functions, which represent engineering judgments. After relieving the uncertainty, the posterior GP models reveal latent relationships between the inputs and the outputs, and quantitatively specify the remaining uncertainty of the latent relationships.
We use two statistical indicators to evaluate the posterior GP models: the standardized mean squared error (SMSE) to the experimental results, and the standard deviation
Statistical indicators of the posterior GP models.
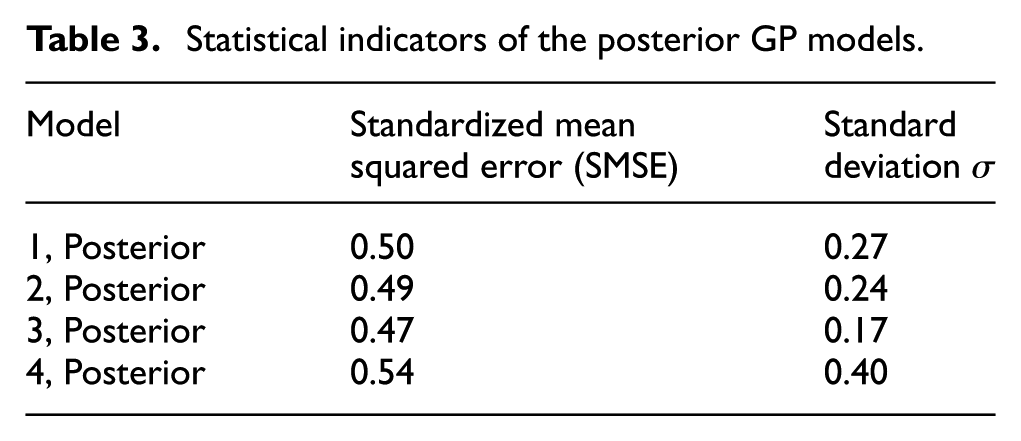
Table 3 indicates that the posterior GP model 3 is more favorable than other models. However, it excludes the influences of the cohesion
The SMSEs in Table 3 are not small because we have used simple—or parsimonious—prior models. The parsimony is favorable and it can ensure the stability of prediction in terms of Bayesian inference. We can reduce the SMSEs using complicated prior models. However, the complicated models could introduce more calibration parameters that are difficult to measure, and then the training data would become inadequate. As an alternative, we can reduce the SESEs by optimizing the posterior GP models (Hastie et al., 2001; Nocedal and Wright, 2006). The optimization is meaningful for interpolation problems in which we have known all the experimental results. We illustrate the optimized GP model 1 and model 3 in Figure 3 and compare their interpolation with the experimental results in Figure 4. Figures 3 and 4 show that the optimized models are in good agreement with the known experimental results. Because the experimental results are heavily scattered, the agreement is very difficult to achieve using deterministic regression.
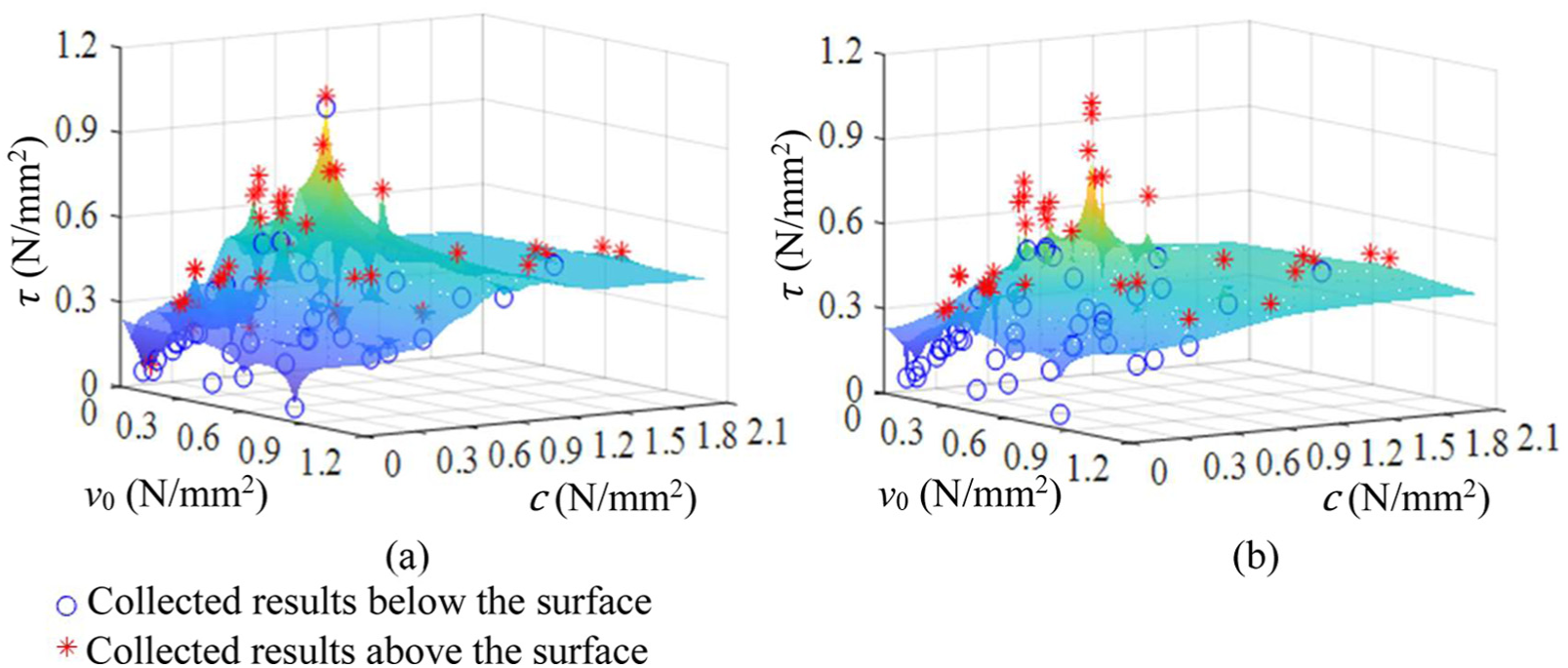
Surface of the optimized mean function: (a) Model 1 and (b) Model 3.
Interpolation results of the optimized GP models: (a) Model 1 and (b) Model 3.
Predication based on the updated GP models
In this section, we use the posterior GP model 1 and model 3 to predict new experimental results, which are from our own experiments and have not been used in model training. We constructed six 240-mm-thick fire-clay brick URM walls following the Chinese Code for Design of Masonry Structures (GB50003-2011, 2011) and determined their shear resistance through pseudo-static experiments. The experimental setup and the loading procedure are illustrated in Figure 5, and the experimental parameters and results are listed in Table 4. Other details of the experiments can be found elsewhere (Peng et al., 2016). Together with other parameters, Table 4 lists the aspect ratio of the specimens. This parameter influences the failure mode and shear resistance, but it is not considered in the prior GP models. We will show that the GP models suffer from missing the parameter.
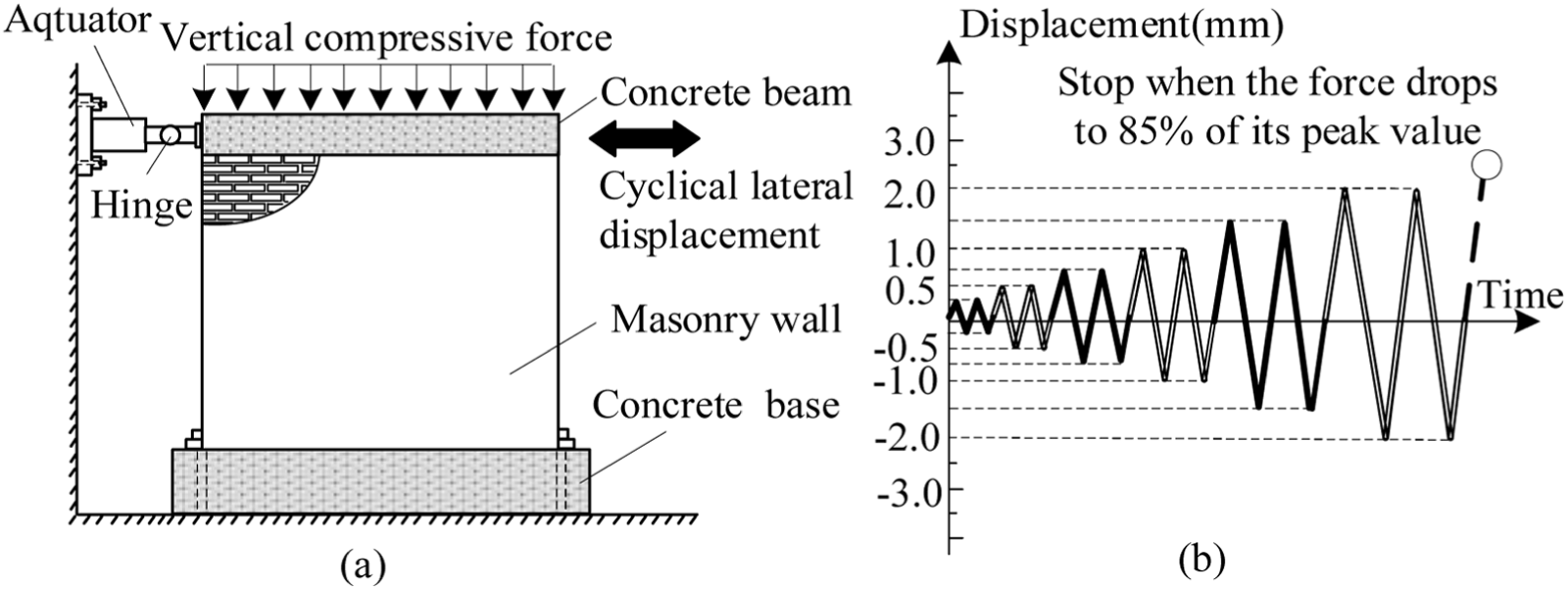
Pseudo-static experimental setup and lateral loading procedure: (a) experimental setup and (b) lateral loading procedure.
Experimental parameters and results.
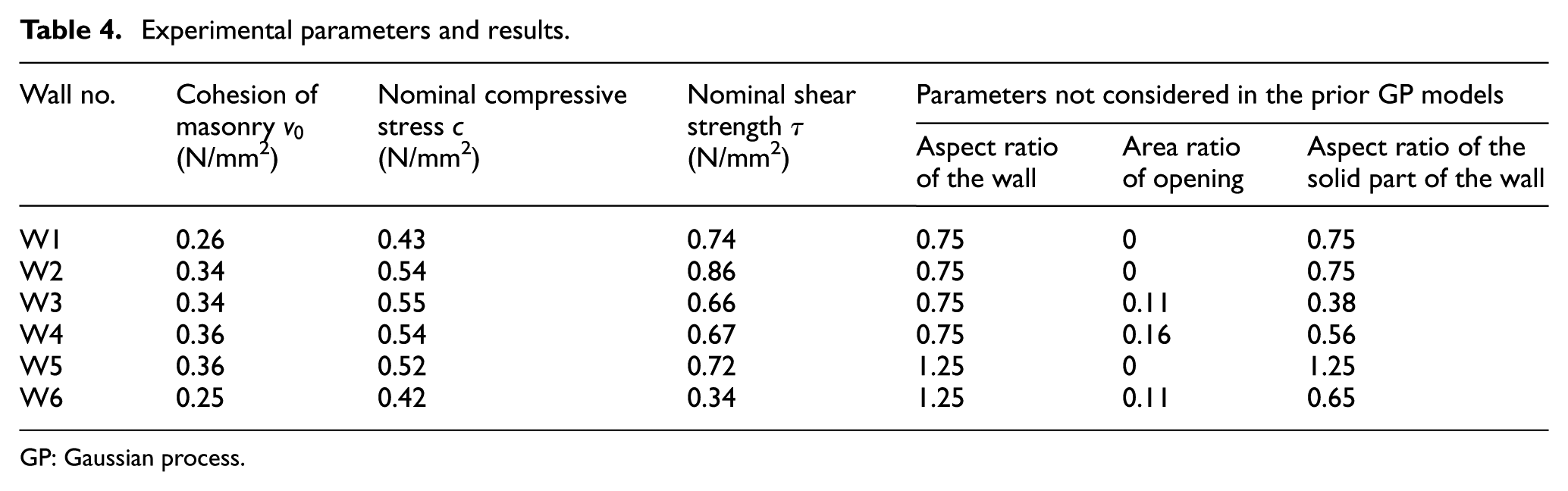
GP: Gaussian process.
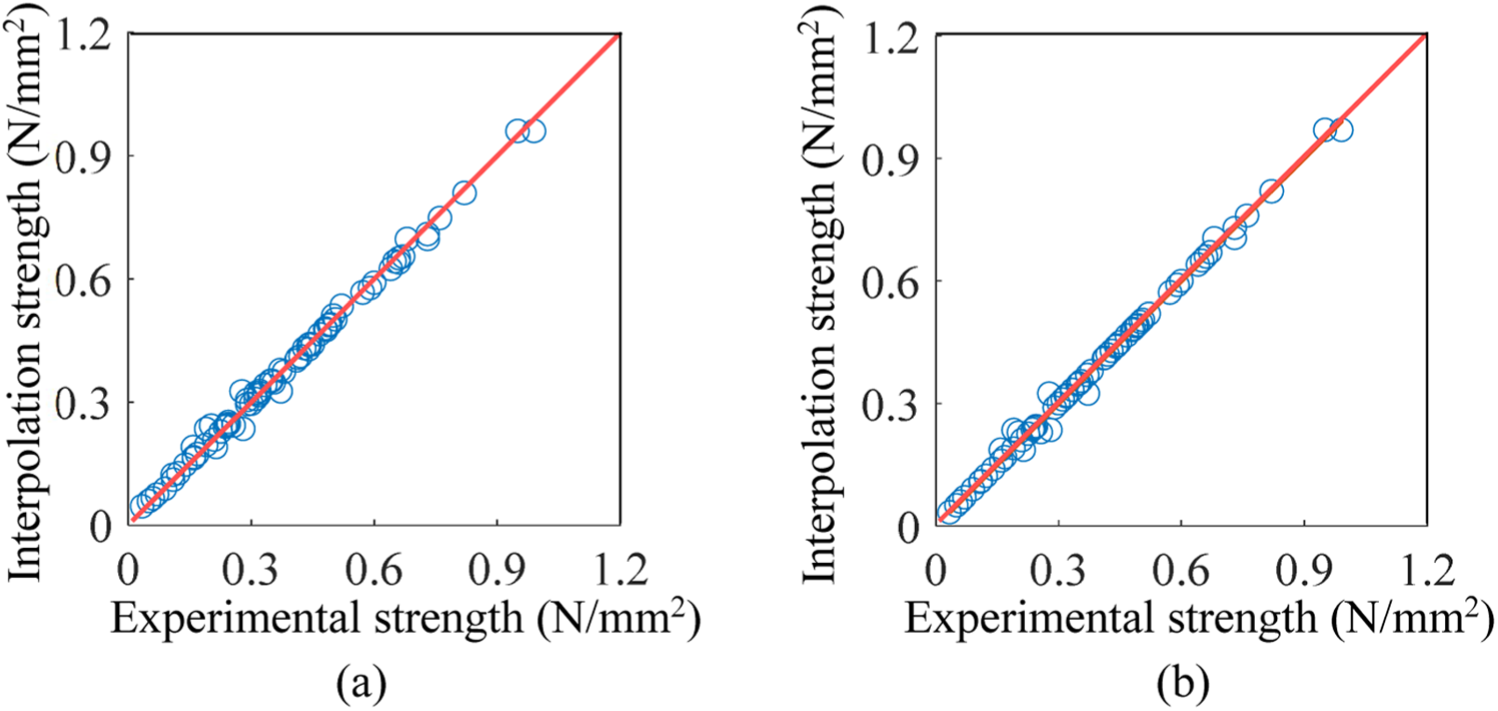
For each set of
Predicted normal PDF of the nominal shear strength τ.
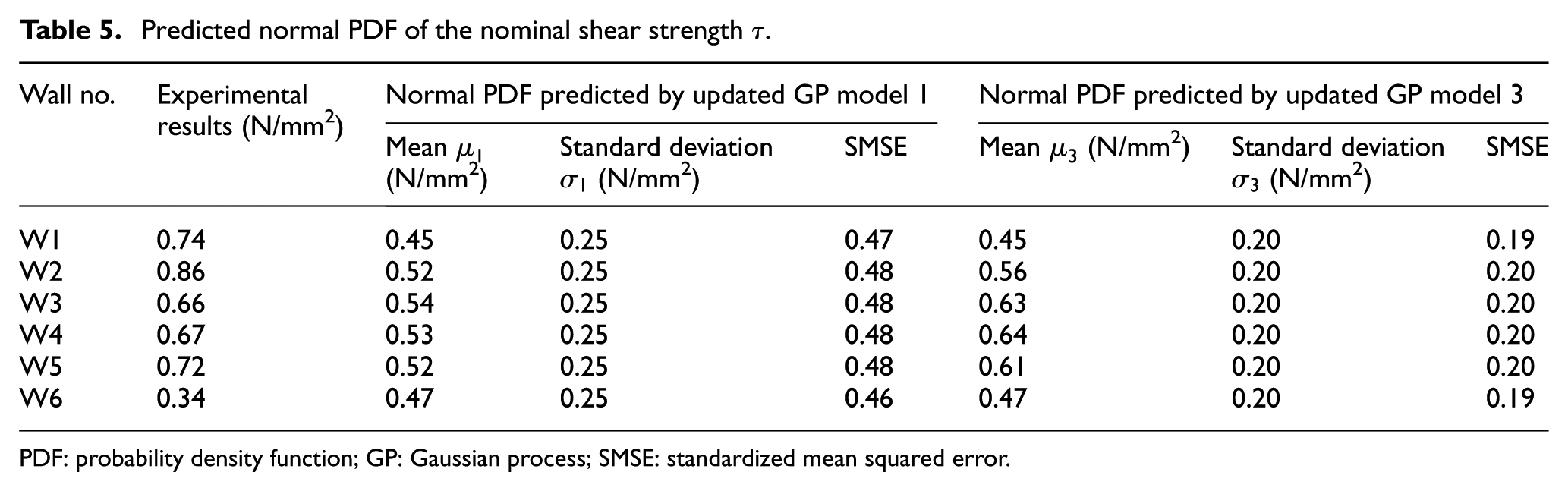
PDF: probability density function; GP: Gaussian process; SMSE: standardized mean squared error.
The GP models give information that is unavailable if using deterministic models. The SMSEs indicate that the estimators given by the updated GP model 3 are in better agreement with experimental results, and the stand deviations indicate that the estimators given by the updated GP model 3 are more certain. The updated GP models still have uncertainty, as any deterministic models do; but they can quantitatively specify their uncertainty, unlike the deterministic models that fail to do so. With this feature, the GP models can give clear information for decision-making in real-world practices.
The updated GP model 3 predicts well for the walls having aspect ratios below 0.6, like wall 3 and wall 4. Because the small aspect ratio makes the two walls more likely to fail in diagonal shear mode, which is in accordance with the judgment of the prior GP model 3. The same model predicts poor for the other walls that have aspect ratios above 0.6, because the big aspect ratio makes the walls less likely to fail in diagonal shear modes. For such walls, the prior GP model 3 is significantly biased and then the posterior model cannot predict well.
The COV of all experimental results is 0.26, while the COV of all estimators given by the updated GP model 3 is 0.15. The small COV denotes the mean function of the updated GP model 3 is smooth (or stable) enough, and thus, the model is favorable for predication. The smooth mean function indicates that the training and updating procedures have penalized the unnecessary complexity of the model, as has explained for equation (6).
The GP models have other potential advantages for real-world practices. First, they are efficient because they do not involve the constitutive relationships and the failure criteria of the URM. Using the GP models, we can directly predict the shear resistance without conducting a full range of iterative analysis. Second, they specify the normal PDFs of the nominal shear resistance. The normal PDFs give adequate information for decision-making and facilitate the reliability index calculation by simplifying the performance functions. Third, the GP models are easily improvable. Their updating runs completely on the new experimental results as those listed in Table 4, while involving no operation on the previously used results as those listed in Appendix 1. The updating can be triggered again whenever other experimental results arrive.
With the above-mentioned features, the GP models can predict the shear resistance using simple prior models and a few parameters that can be easily measured. Their prediction can be efficiently improved along with the accumulation of experimental results.
Conclusion
Uncertainty is a major issue in the shear resistance estimation for URM walls. To account for the uncertainty, we converted the deterministic shear resistance models to prior GP models, trained the prior GP models into posterior ones using the experimental results collected from literature, and then verified the performance of the GP models in interpolation and predication. The following conclusions are drawn from this research.
The GP models can combine and weight the engineering judgments and the information from experimental results. They use the engineering judgments to compensate for information inadequateness of the scattered experimental results. Meanwhile, they use the information from the experimental results to relieve the potential bias of the engineering judgments. Therefore, they can realize interpolations that are in good agreement with heavily scattered experimental results.
The GP models account for both parameter uncertainty and model uncertainty. They allow us to estimate the shear resistance of the URM walls, even when we are not sure about the parameters and the failure mechanisms. They are flexible and compatible with a wide range of simple prior models. Meanwhile, their training or updating procedures automatically penalize the unnecessary complexity and then result in stable posterior mean functions that are favorable for estimation.
The GP models can determine normal PDFs for the shear resistance. The normal PDFs can generate shear resistance estimators and then quantitatively specify the estimators’ remaining uncertainty. Having the PDFs, we can determine whether we should modify the priors to relieve the bias, or whether we should use more experimental results to further update the posterior GP models. The normal PDFs also facilitate reliability index calculations in structural assessments. With these advantages, the GP models are potentially useful in the shear resistance estimation for the URM walls.
Footnotes
Appendix 1
Shear resistance experimental results of unreinforced masonry (URM) walls (
| No. |
|
c | τ | No. |
|
c | τ |
|---|---|---|---|---|---|---|---|
| 1 (Fan et al., 2012) | 0.19 | 0.70 | 0.49 | 40 (Mazzotti et al., 2014) | 0.13 | 0.65 | 0.73 |
| 2 (Han, 2011) | 0.27 | 0.60 | 0.66 | 41 (Mazzotti et al., 2014) | 0.13 | 1.04 | 0.99 |
| 3 (Lei et al., 2013) | 0.18 | 0.60 | 0.59 | 42 (Mazzotti et al., 2014) | 0.13 | 1.04 | 0.95 |
| 4 (Xiao et al., 2014) | 0.24 | 0.15 | 0.44 | 43 (Mazzotti et al., 2014) | 0.13 | 1.02 | 0.82 |
| 5 (Deng et al., 2015) | 0.37 | 0.50 | 0.64 | 44 (Farooq et al., 2014) | 0.81 | 0.50 | 0.48 |
| 6 (Zhang et al., 2015) | 0.21 | 1.20 | 0.31 | 45 (Choi et al., 2016) | 0.86 | 0.00 | 0.05 |
| 7 (Zhao et al., 2001) | 0.27 | 1.20 | 0.67 | 46 (Gattulli et al., 2017) | 0.12 | 0.50 | 0.11 |
| 8 (Wei and Zhou, 2006) | 0.13 | 0.64 | 0.29 | 47 (Martinelli et al., 2016) | 0.08 | 0.50 | 0.36 |
| 9 (Yang et al., 2008) | 0.09 | 0.35 | 0.24 | 48 (Dhanasekar et al., 2017) | 0.67 | 0.50 | 0.24 |
| 10 (Zhang et al., 2013) | 0.23 | 0.70 | 0.48 | 49 (Gams et al., 2017) | 0.31 | 1.23 | 0.35 |
| 11 (Zhang et al., 2013) | 0.23 | 1.30 | 0.44 | 50 (Salmanpour et al., 2015) | 0.40 | 0.60 | 0.60 |
| 12 (Lin and Ye, 2005) | 0.04 | 0.71 | 0.32 | 51 (Salmanpour et al., 2015) | 1.12 | 0.90 | 0.43 |
| 13 (Lin and Ye, 2005) | 0.11 | 0.96 | 0.37 | 52 (Salmanpour et al., 2015) | 0.98 | 0.60 | 0.37 |
| 14 (Hang, 2011) | 0.13 | 0.15 | 0.14 | 53 (Salmanpour et al., 2015) | 0.98 | 0.30 | 0.23 |
| 15 (Hang, 2011) | 0.13 | 0.30 | 0.19 | 54 (Salmanpour et al., 2015) | 0.98 | 1.21 | 0.51 |
| 16 (Wang et al., 2003) | 0.13 | 0.80 | 0.65 | 55 (Salmanpour et al., 2015) | 0.98 | 0.40 | 0.24 |
| 17 (Wang et al., 2003) | 0.18 | 1.00 | 0.73 | 56 (Salmanpour et al., 2015) | 0.98 | 0.80 | 0.57 |
| 18 (Fang, 2009) | 0.28 | 0.60 | 0.52 | 57 (Salmanpour et al., 2015) | 0.98 | 0.60 | 0.28 |
| 19 (Fang, 2009) | 0.28 | 0.30 | 0.45 | 58 (De Nardi et al., 2017) | 0.19 | 0.60 | 0.50 |
| 20 (Zhu et al., 1984) | 0.07 | 0.46 | 0.32 | 59 (Deng and Yang, 2018) | 0.52 | 0.50 | 0.29 |
| 21 (Zhu et al., 1984) | 0.12 | 0.46 | 0.38 | 60 (Deng and Yang, 2018) | 0.64 | 0.50 | 0.32 |
| 22 (Shi, 2003) | 0.3 | 0.9 | 0.76 | 61 (Karimi et al., 2016) | 0.67 | 0.17 | 0.17 |
| 23 (Shi, 2003) | 0.3 | 0.22 | 0.41 | 62 (Zhou et al., 2013) | 0.64 | 0.60 | 0.44 |
| 24 (Zhu et al., 1980) | 0.06 | 0.06 | 0.06 | 63 (Guerreiro et al., 2018) | 0.64 | 0.32 | 0.24 |
| 25 (Zhu et al., 1980) | 0.06 | 0.30 | 0.16 | 64 (Zhang et al., 2018) | 0.48 | 0.60 | 0.33 |
| 26 (Zhu et al., 1980) | 0.11 | 0.06 | 0.07 | 65 (Mazzotti et al., 2015) | 0.60 | 0.00 | 0.12 |
| 27 (Zhu et al., 1980) | 0.11 | 0.30 | 0.19 | 66 (Tomaževič and Weiss, 2012) | 0.83 | 1.92 | 0.49 |
| 28 (Zhu et al., 1980) | 0.11 | 0.20 | 0.16 | 67 (Tomaževič and Weiss, 2012) | 0.64 | 1.71 | 0.47 |
| 29 (Zhu et al., 1980) | 0.10 | 0.06 | 0.09 | 68 (Tomaževič and Weiss, 2012) | 0.71 | 1.95 | 0.49 |
| 30 (Zhu et al., 1980) | 0.10 | 0.30 | 0.21 | 69 (Tomaževič and Weiss, 2012) | 0.71 | 1.67 | 0.44 |
| 31 (Zhu et al., 1980) | 0.10 | 0.20 | 0.16 | 70 (Tomaževič and Weiss, 2012) | 0.67 | 1.62 | 0.49 |
| 32 (Zhu et al., 1980) | 0.13 | 0.06 | 0.11 | 71 (Tomaževič and Weiss, 2012) | 0.67 | 1.19 | 0.35 |
| 33 (Zhu et al., 1980) | 0.13 | 0.46 | 0.35 | 72 (Churilov and Dumova-Jovanoska, 2013) | 0.21 | 1.00 | 0.26 |
| 34 (Zhu et al., 1980) | 0.13 | 0.30 | 0.28 | 73 (Churilov and Dumova-Jovanoska, 2013) | 0.21 | 1.00 | 0.20 |
| 35 (Mazzotti et al., 2014) | 0.13 | 0.22 | 0.31 | 74 (Churilov and Dumova-Jovanoska, 2013) | 0.21 | 0.50 | 0.21 |
| 36 (Mazzotti et al., 2014) | 0.13 | 0.28 | 0.42 | 75 (Churilov and Dumova-Jovanoska, 2013) | 0.21 | 0.50 | 0.16 |
| 37 (Mazzotti et al., 2014) | 0.13 | 0.19 | 0.3 | 76 (Rahgozar and Hosseini, 2017) | 0.35 | 0.40 | 0.41 |
| 38 (Mazzotti et al., 2014) | 0.13 | 0.62 | 0.66 | 77 (Facconi et al., 2015) | 0.62 | 0.36 | 0.24 |
| 39 (Mazzotti et al., 2014) | 0.13 | 0.65 | 0.68 | 78 (Shabdin et al., 2018) | 0.24 | 0.25 | 0.03 |
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research is financially supported by the National Natural Science Foundation of China under Grant No. 51208300.