
Abstract
It is of extreme importance to assess the failure probability and safety level of structural system in structural design. Nowadays, many researchers presented several approaches for structural reliability analysis, such as the first-order reliability method, Monte Carlo simulation, and the meta-heuristic algorithm. The meta-heuristic algorithm is not only efficient to solve global optimization problems but also shown to be an effective tool for structural reliability analysis. A recent meta-heuristic optimization approach, enhanced colliding bodies optimization, has emerged as a relatively simple implementation with a fast convergence speed. Chaos theory is characterized by its ergodicity, pseudo-randomness, and irregularity. This article thus presents a novel approach introducing chaotic maps into the enhanced colliding bodies optimization algorithm to promote the performance of convergence, named as chaotic enhanced colliding bodies optimization algorithm. The proposed algorithm uses chaotic maps to change the generation pattern of particles and improve convergence characteristics. A procedure based on the effective use of the represented chaotic enhanced colliding bodies optimization is then applied in structural reliability analysis. A variety of numerical and structural problems are tested in this article to demonstrate that the given method actually improves the performance of enhanced colliding bodies optimization in convergence as well as the accuracy for reliability analysis compared with the other methods existing in the literature.
Keywords
Introduction
The inherent uncertainties of a structural system always exist in its design parameters characterizing the mechanical behavior and external loadings acting on it. These uncertainties ultimately have an effect on structural safety, which calls for structural reliability assessment to take these uncertainties into consideration in the evaluation of the structural safety level. Generally,
A great number of methods or algorithms have been presented by researchers over the last four decades to assess structural reliability. These methods usually fall into three categories: the simulation method, the approximation method, and the meta-heuristic algorithm. Simulation methods such as Monte Carlo simulation (MCS) obtain the accurate solution for every problem without demanding the analytical formulation of limit state function, but require a tremendous computational effort which will result in impeding their efficiency. The typical approximation methods, the first-order reliability method (FORM; Rackwitz and Flessler, 1978) and second-order reliability method (SORM; Der Kiureghian et al., 1987), featured by the simple form, are unsatisfactory in the precision to compute large issues and small values of failure probability or high nonlinear limit state functions (Kaveh et al., 2014). To enhance the performance of the FORM, several modified iterative FORM algorithms are suggested. Meng et al. (2015, 2018a) explored the directional feature of the iterative process and presented an efficient modified chaos control method. Then, a single-loop approach (SLA) is introduced to assess the approximate most probable point (MPP) employing the reliability information of the previous iteration (Jiang et al., 2017). Furthermore, the SLA is combined with chaos control to enhance the stability of the iterative point and applied to solve the reliability-based design problem (Meng and Keshtegar, 2019; Meng et al., 2017, 2018b).
The meta-heuristic algorithms originate from social behaviors or natural phenomena such as bird flocking, fish schooling, and swarm theory. These algorithms are characterized by reasonable computational cost, the ability to solve complex problems, and quick convergence due to their intensification and diversification strategies. The intensification process searches around the current best solution and selects the best candidate points, and the diversification process allows the optimizer to explore the search space more efficiently, mostly by randomization (Gandomi et al., 2013). The meta-heuristic algorithm appears as an effective technique to solve a wide range of practical optimization problems in the past decades. Its obvious advantages in solving optimization problems capture much attention and have been successfully applied to analyze structural reliability, such as particle swarm optimization (PSO) algorithm used in the structural reliability analysis for its advantages of the facility of implementation, the possibility to obtain the design point and the failure probability with a good accuracy, and the low computational time of the zero-order algorithm (Elegbede, 2005); charged system search (CSS) algorithm utilized to evaluate structural reliability by its ability to find a design point on the failure surface and calculate the failure probability with a reasonable accuracy as well as low computational cost and maintain a satisfactory convergence rate (Kaveh and Ilchi, 2015); and colliding bodies optimization (CBO) and improved ray optimization (IRO) algorithms proposed to solve reliability problems due to their simple concept and fast convergence speed without any internal parameters (Kaveh and Ilchi, 2015).
Kaveh and Ghazaan (2014) first proposed enhanced colliding bodies optimization (ECBO) based on CBO in 2014. It is a meta-heuristic algorithm inspired by a one-dimensional (1D) collision. Each particle called colliding body (CB) in collision owns its mass and velocity. Compared with the standard CBO, a memory mechanism used to save historical solutions is introduced to promote the convergence behavior, and thus the ECBO has better exploration capacity with a lower computational cost. These advantages contribute to the good performance for solving the optimization problem (Kaveh and Ilchi, 2014). The ECBO has become a research interest to many research scientists of related fields (Alatas, 2010a). In recent years, the ECBO has also been applied in structural reliability analysis and proves to be a potential approach (Kaveh and Ilchi, 2015).
Chaos, a common nonlinear phenomenon that exists in the nonlinear system, is featured by pseudo-randomness, ergodicity, and sensitive dependence on initial conditions. Chaos is not a mess of “disorder,” but a class of nonlinear phenomenon that has an exquisite intrinsic structure (Gong and Wang, 2009), that is, order derives from disorder. With the development of the nonlinear dynamics, chaos has been widely used in various applications such as mechanical design optimization and structural reliability analysis (Pecora and Carroll, 1990). Especially, the chaotic strategy has been successfully incorporated into many meta-heuristic algorithms in a variety of forms. Liu et al. (2005) present a new algorithm hybridizing PSO and chaos to improve the search quality, efficiency, and robustness; Alatas (2010b) proposes a novel chaotic harmony search algorithm using chaotic maps for parameter adaptation to improve the convergence characteristics and prevent the harmony search to get stuck in local solutions; Talatahari et al. (2012) develop a new imperialist competitive algorithm utilizing the idea of using chaotic systems instead of random processes to improve the movement step of the algorithm; Gandomi et al. (2013) provide a firefly algorithm (FA) with chaos employing various chaotic maps to tune the attraction parameters (light absorption coefficient and attractiveness coefficient) of the FA; Kaur and Arora (2018) employ chaotic maps to tune the main parameter of the proposed chaotic whale optimization algorithm which helps in controlling exploration and exploitation; Kohli and Arora (2018) introduce the chaos theory into the chaotic gray wolf optimization to regulate the key parameter with the aim of accelerating its global convergence speed; Kaveh et al. (2018) establish a chaotic version of the ECBO algorithm for mechanical design optimization; and so on.
Considering the satisfactory result achieved by the chaos-based swarm optimization algorithm, this article intends to propose a more efficient meta-heuristic algorithm for structural reliability analysis. Another version of the ECBO algorithm based on chaotic mapping, namely, chaotic enhanced colliding bodies optimization (CECBO), is proposed in this work. The proposed algorithm employs the sequences generated from chaotic mapping to replace the random numbers in the local search stage of ECBO, which will improve the global convergence and prevent from being trapped in a local optimum.
The remainder of this article is organized as follows. An introduction of the method of reliability index assessment is given in section “Failure probability and reliability index assessment.” Reviews of the CBO and ECBO algorithms are summarized in section “CBO.” Section “CECBO and its application in structural reliability analysis” offers a detailed introduction to the proposed method, CECBO. Section “Illustrative examples and comparative results” applies the presented CECBO algorithm to four problems including two mathematical and two structural problems, comparing its accuracy and efficiency to those of the ECBO method, FORM, and MCS. Finally, section “Conclusion” provides some conclusions on the proposed method.
Failure probability and reliability index assessment
Failure probability
The failure probability

where
Reliability index
In practical reliability problems, the basic random variables may be statistically dependent and nonnormally distributed (Huang et al., 2017). In order to take the distribution of nonnormal random variables into account, Rackwitz and Flessler (1978) presented the following transformation T defined as
where


where
The reliability index

where

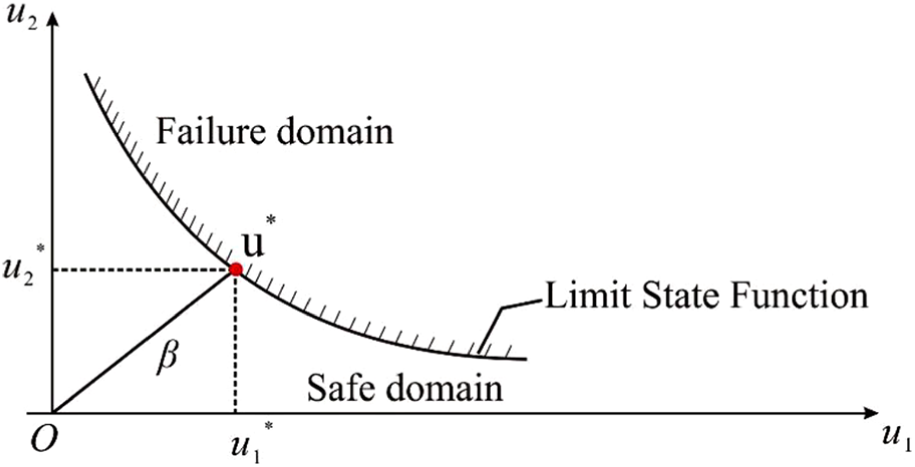
Design point in the two-dimensional space.
A penalty approach can be utilized to tackle the constraints in the optimization problem in equation (5), to calculate the reliability index (Meng and Keshtegar, 2019) in terms of its geometric meaning, written as follows

where

The function


Equation (9) is a quadratic function and equation (10) is an exact penalty function. In this article, the exact penalty function is adopted in the following proposed algorithm.
CBO
Basic idea of the standard CBO
The CBO algorithm is a new nature-inspired meta-heuristic algorithm developed based on 1D collision, with each agent being called CB in collision being modeled as an object or a body with mass and velocity. CBs are divided into two equivalent groups before collision, namely, stationary group and moving group. After a collision of two moving bodies having specified masses and velocities, these bodies are separated with new velocities (Kaveh and Mahdavi, 2014). This collision induces one CB to collide with another CB and move toward better positions in the search space. The CBO utilizes a simple formulation to find the minimum or maximum of functions and does not depend on any internal parameter. The steps of the algorithm are summarized as follows:
Step 1. Initialize CBs by equation (11)

where
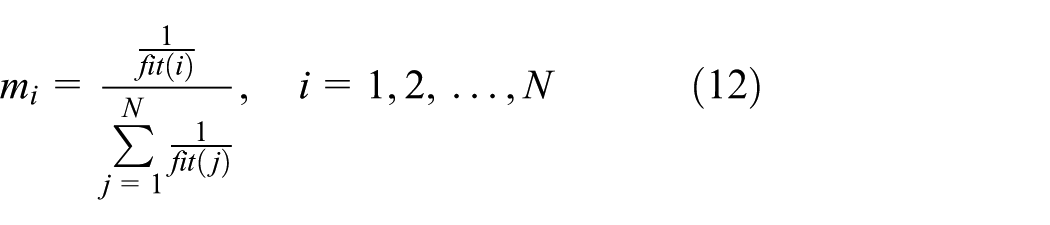
Step 2. Define the mass by equation (12)
Step 3. Divide CBs into two groups
The CBs are divided into stationary groups and moving groups according to Figure 2.
Step 4. Initialize the velocities of stationary CBs by equation (13) before collision

Step 5. Initialize the velocities of moving CBs by equation (14) before collision

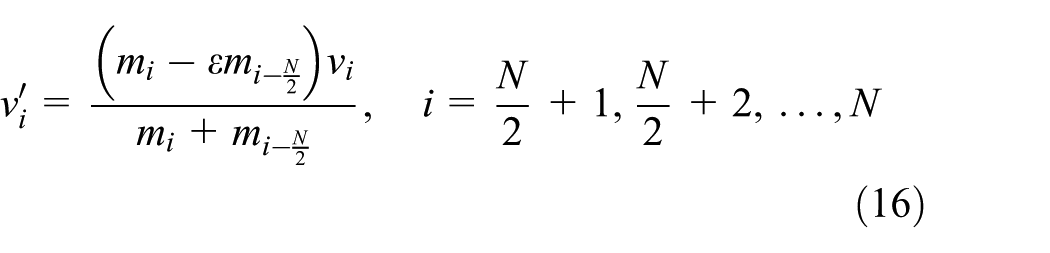
Step 6. Update the velocities of stationary CBs and moving CBs by equations (15) and (16) after collision

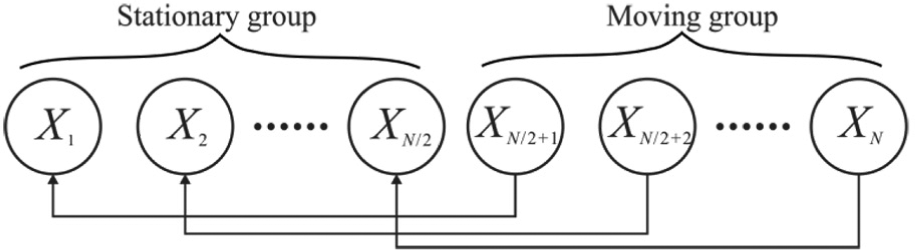
Colliding body groups and pairs of objects for collision.
where

where t indicates the current iteration number and MaxDT is the maximum of iterations.
Step 7. Update the positions of stationary CBs by equation (18)

where
Step 8. Update the positions of moving CBs by equation (19)

where
ECBO
Attempting to improve the performance of CBO, ECBO is proposed based on the CBO (Kaveh and Ilchi, 2014). A novel mechanism, colliding memory (CM), is introduced in the ECBO to save the historical best solution, which will distinctly reduce the computational cost. In addition, the ECBO employs a local search mechanism which provides chances for the CBs to traverse the search space, thus finding a better solution.
Various structural and benchmark mathematical optimization problems have been successfully solved using ECBO by Kaveh and Ilchi (2014), who demonstrate the better performance of ECBO on exploration characteristics and local search ability compared with standard CBO.
The procedure of the ECBO is given in the following steps:
Step 1. Initialize
Initialize the position of CBs randomly in the multi-dimensional search space by equation (11).
Step 2. Compute mass and fitness
Fitness is the value of the objective function of each CB, and mass can be computed by equation (12).
Step 3. Introduce CM and update CBs
In this stage, the best solution of CBs is added in CM and the worst CB is replaced by CBs in CM. Finally, CBs are sorted by their fitness in an increasing order.
Step 4. Divide all CBs into two groups
According to Figure 2, all of the CBs are separated into two groups: stationary group and moving group. Then, CBs are matched in pairs, one chosen from the stationary group and the other from the moving group.
Step 5. Initialize velocities before collision
Before collision, the velocities of stationary CBs and moving CBs are calculated by equations (13) and (14).
Step 6. Update velocities and positions
The velocities and position of two groups after collision are updated by equations (15) to (19).
Step 7. Local optimization strategy
A criterion is proposed in this step to improve the local search ability. A parameter pro within (0, 1) is introduced in this stage. If

where
Step 8. Stop
If the convergence criterion is not satisfied, Steps 2–7 are continued to begin a new iteration; else, finish the process.
CECBO and its application in structural reliability analysis
CECBO algorithm
Chaos, a common phenomenon occurring in a deterministic nonlinear dynamic system under deterministic conditions, is emerging as a new theory in recent years. Chaos is sensitive to its initial condition and parameter, that is, a minute change in the initial conditions will give rise to a large difference in its long-term behavior. In addition, sensitive dependence on initial conditions is observed not only in complex systems, but even in the simplest logistic map discussed by May (1976). The logistic map is defined as

where
This article thus attempts to present a novel chaotic version of the ECBO algorithm to enhance the local search ability of the ECBO, and we call it the CECBO algorithm.
The main steps of the proposed CECBO are as follows:
Initialize positions of CB generated randomly according to equation (12);
Calculate mass and fitness for each CB according to Step 2 of the ECBO;
Employ the CM mechanism to save the best-so-far solutions;
Separate CBs into stationary group and moving group, respectively;
Initialize the velocities and positions of CBs before collision;
Update velocities according to equations (15) and (16);
Update positions according to equations (18) and (19) and obtain the global optimum gbest;
Update positions of CBs using the chaotic local search technique.
A procedure is now presented for the chaotic local search:
Step 1. Set the iteration number

where
Step 2. Update the chaotic variables
Step 3. Convert the chaotic variables

Step 4. Stop until the terminal criterion is satisfied.
Chaotic search range
In the process of ECBO, the global optimal value is obtained from numerous collisions between CBs, and rear CBs push front CBs to move toward the best position. However, a great many insignificant collisions increase the cost of ECBO which leads to time consumption. In fact, chaotic search is efficient only in a small range (Jiang, 1998). The bounds of variables, namely,


where
Procedure for structural reliability analysis
In this part, the standard ECBO algorithm and its chaotic version—the CECBO algorithm—are applied in solving the constrained optimization problem defined using equation (26) to calculate the reliability index
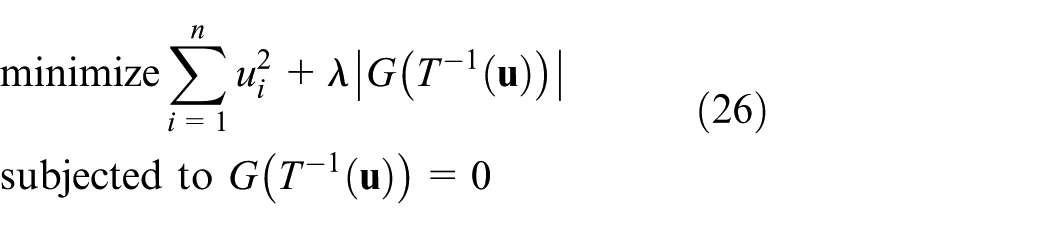
The ECBO-based FORM and CECBO-based FORM are thus presented for structural reliability analysis. Their procedures are shown below.
ECBO for structural reliability analysis
The steps for structural reliability analysis can be summarized as follows:
Step 1. Initialize the positions of CBs.
Step 2. Evaluate CB’s fitness and mass using the penalty mechanism.
Step 3. Update the CM and population.
Step 4. Divide CBs into two groups: stationary and moving groups.
Step 5. Initialize the velocities of CBs before collision.
Step 6. Initialize the positions of CBs before collision.
Step 7. Update the velocities and positions of CBs after collision.
Step 8. Check the terminal criterion. If the convergence condition defined in equation (27) is satisfied

where t denotes the current iteration number,
Step 9. Output the design point and reliability index. Otherwise, go to Step 2 for a new round of iteration.
CECBO for structural reliability analysis
Compared with the procedure of ECBO for structural reliability analysis, the CECBO is differs mainly in local optimization strategy. The flowchart of the CECBO and ECBO algorithms for structural reliability analysis is shown in Figure 3. A chaos-based local optimization strategy is added in the CECBO between Steps 7 and 8 of the ECBO, shown using a red dashed box in Figure 3, which involves renewing the search range and generating the chaotic variables by the logistic map to substitute the random variable. As a result, the new positions of CBs are updated by the pseudo-randomness strategy of chaotic mapping.

Flowchart of the ECBO/CECBO algorithm for structural reliability analysis.
Illustrative examples and comparative results
In this section, two numerical examples and two structural examples are implemented to verify the performance of our reliability method. In each example, the results obtained by the proposed algorithm and the results reported in the literature are listed in the tables. Moreover, the trends of these algorithms, comparison of the proposed CECBO with 60 CBs and 80 CBs, and comparison of the ECBO with 60 CBs and 80 CBs are shown through the diagrams in each example, respectively.
Each instance runs independently 50 times to obtain its best results. Table 9 presents the average values, standard deviation, the number of performance function evaluations (F-evaluations), and the t-values from the t-test to assess the statistical significance of the difference between the CECBO algorithm and other methods. The F-evaluations and t-values are popular for use to measure the efficiency of optimization algorithms (Tang et al., 2018), reflecting the computational cost and complexity of optimization algorithms via the population size, average number of algorithm iterations to converge.
Examples for reliability analysis
Example 1
This example is selected from Kim and Na (1997) with the limit state function being defined as

where


Statistics of random variables in Example 1.

Comparison of analysis results of Example 1.
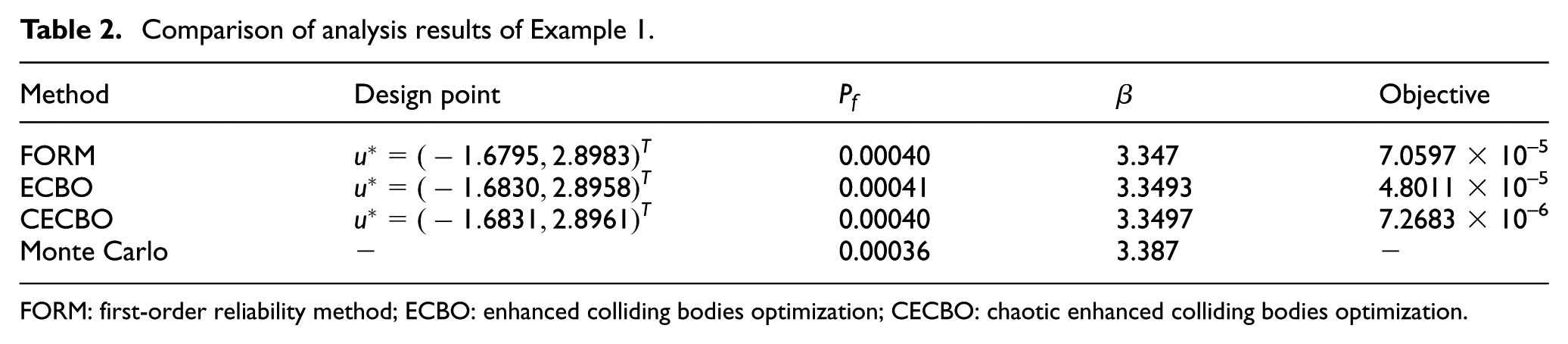
FORM: first-order reliability method; ECBO: enhanced colliding bodies optimization; CECBO: chaotic enhanced colliding bodies optimization.
For the sake of comparison, the penalty coefficient


where
Figure 4 shows the comparison of the histories of the obtained reliability index under certain number of iterations of each method. The historical curves are plotted until the stopping criterion is satisfied. It can be seen from Table 2 and Figure 4 that the CECBO outperforms the ECBO in terms of accuracy and efficiency. The ECBO produces a series of continuous small fluctuations after the sixth iteration and obtains

Example 1: comparisons of the histories of the reliability index per iteration.

Objective value of Example 1 obtained by ECBO and CECBO.
Example 2
This example is given by Elegbede (2005) and the limit state function is expressed as

where

Statistics of random variables in Example 2.

Comparison of analysis results of Example 2.
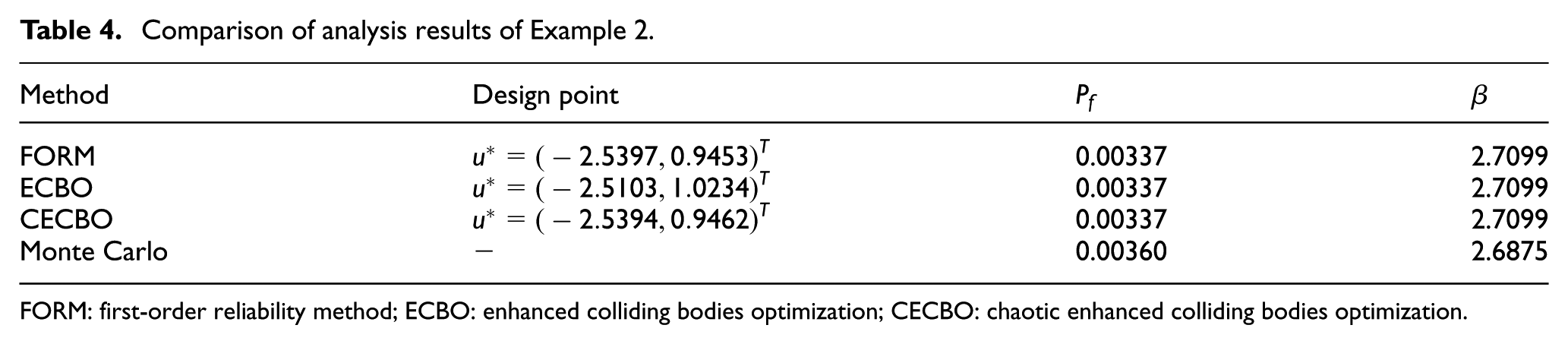
FORM: first-order reliability method; ECBO: enhanced colliding bodies optimization; CECBO: chaotic enhanced colliding bodies optimization.
To make the comparison between ECBO and CECBO, which utilize the same penalty coefficient, the corresponding value of

where
The obtained reliability indices

Example 2: comparisons of the histories of the reliability index per iteration.
Example 3
This example is given by Roudak et al. (2017). A three-span beam structure shown in Figure 7 is selected as another engineering problem. The beam subjects to a uniformly distributed load w, and the length of a single span L is determinate,


A three-span beam structure.
The statistics of these variables are given in Table 5. The upper and lower bounds of the three variables in the standard normal space are 5 and −5, respectively. The result of the reliability analysis of Example 3 is shown in Table 6. In this test, the control condition is set as


Statistics of random variables in Example 3.

Comparison of analysis results of Example 3.
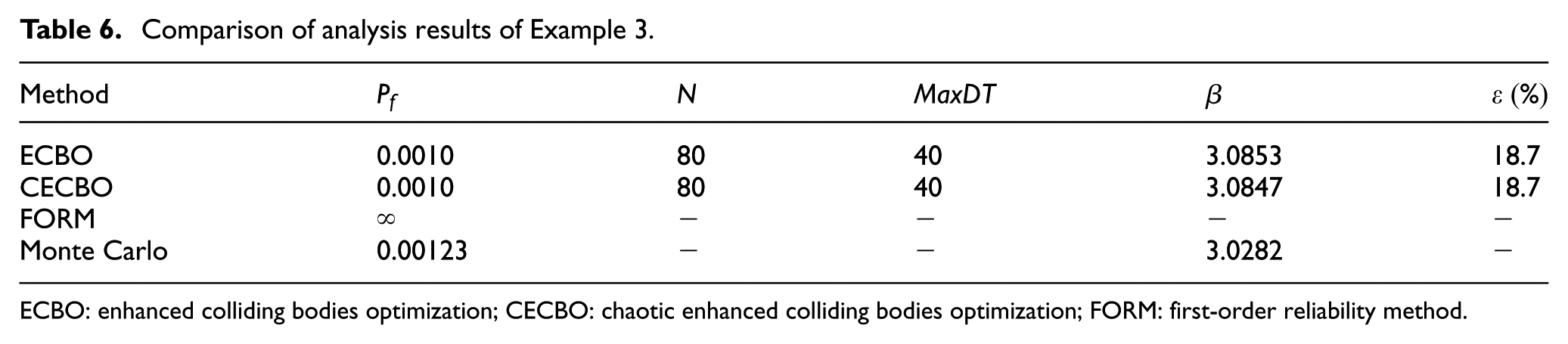
ECBO: enhanced colliding bodies optimization; CECBO: chaotic enhanced colliding bodies optimization; FORM: first-order reliability method.
The ECBO uses the same sequence of penalty coefficient as the CECBO to compare the performance of the two optimization algorithms and the values of


where
As shown in Table 6, FORM fails to converge due to high nonlinearity of the limit state function, while the proposed CECBO and ECBO algorithms both enable to obtain the stable solution. The curves of the proposed method and standard ECBO converge to
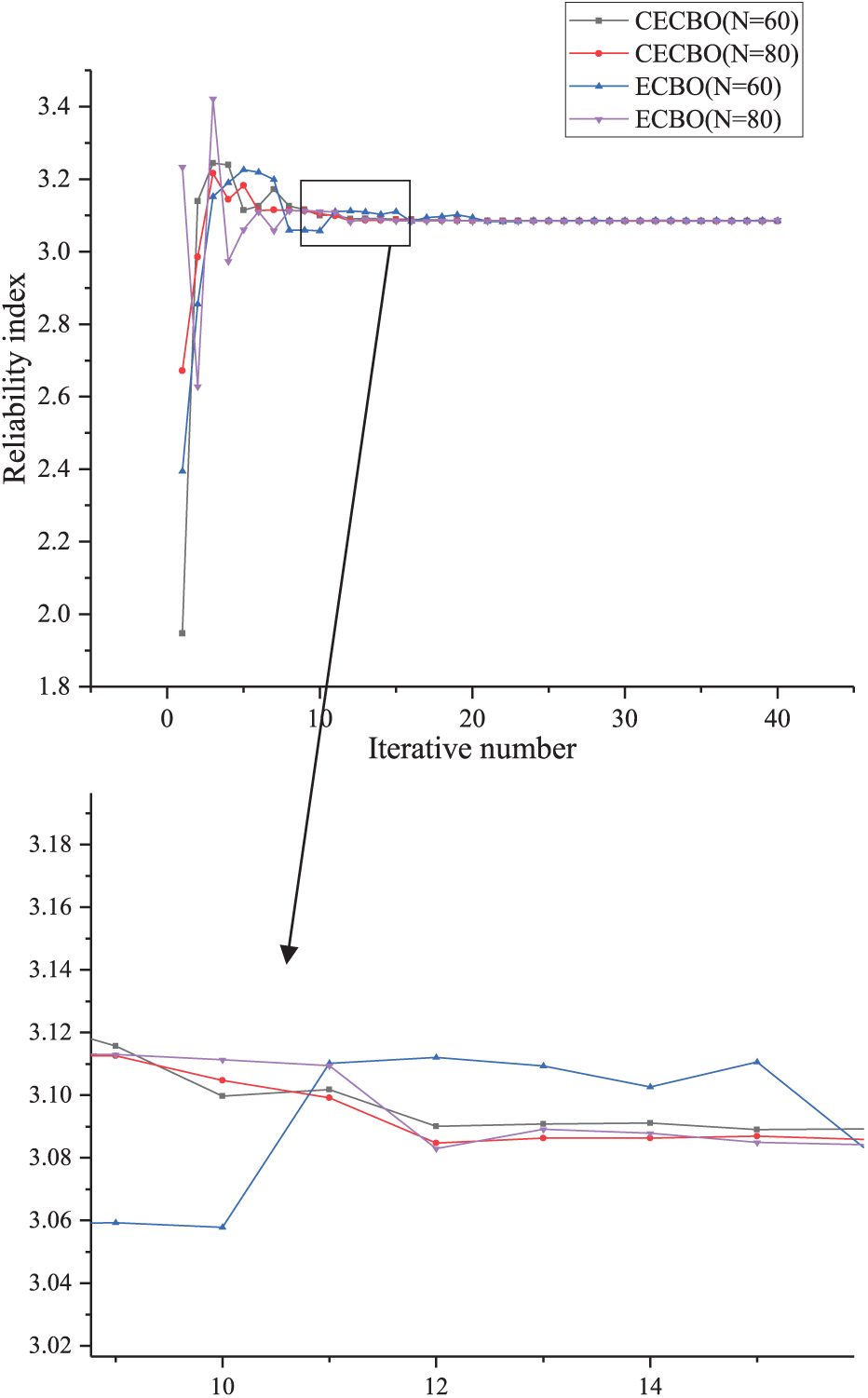
Example 3: comparisons of the histories of the reliability index per iteration.
Example 4
This example is given by Roudak et al. (2017). In this example, the limit state function corresponds to a primary–secondary dynamic system, as shown in Figure 9. The limit state function can be expressed by eight random variables, including the masses

Primary–secondary system.
Statistics of random variables in Example 4.
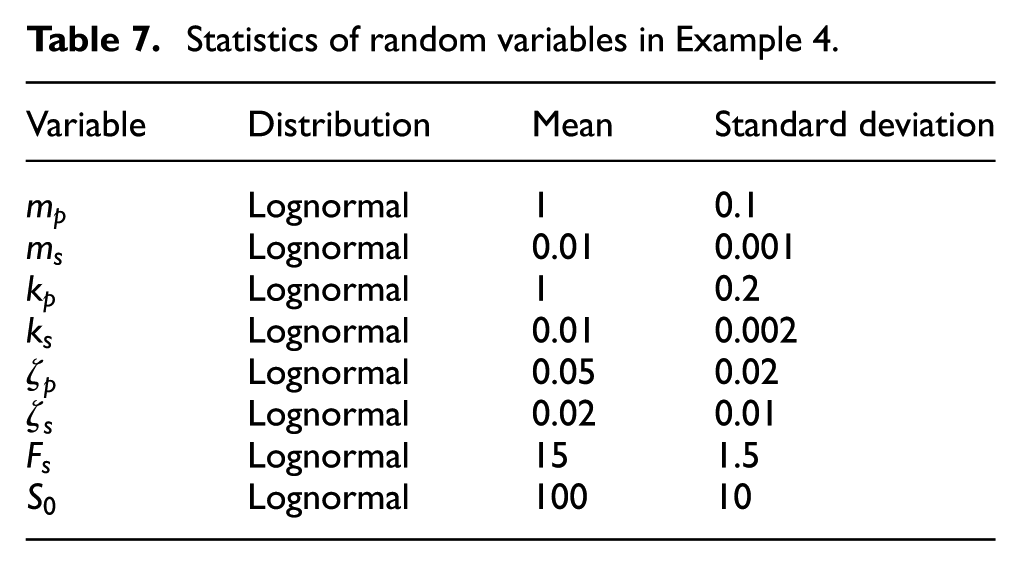
The mean square relative displacement response of the secondary spring to the white noise base excitation, that is,

where

The reliability index obtained by MCS after

Comparison of analysis results of Example 4.
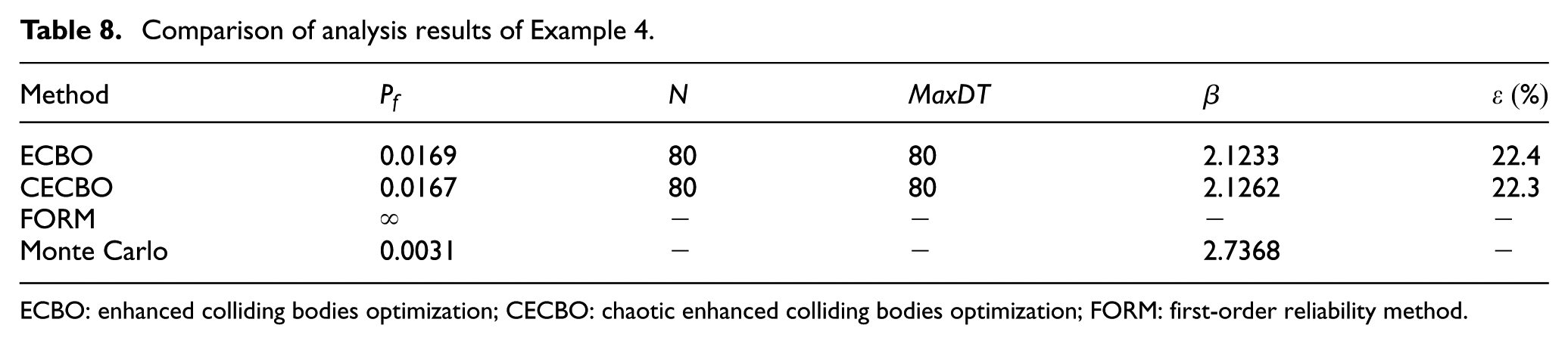
ECBO: enhanced colliding bodies optimization; CECBO: chaotic enhanced colliding bodies optimization; FORM: first-order reliability method.
The penalty coefficient of the ECBO is kept consistent with the CECBO for performance comparison, and the value of

where
It can be seen from Table 8 that the FORM encounters errors induced by high nonlinearity of the performance function. The behaviors of the proposed CECBO and ECBO with 60 CBs and 80 CBs can be compared as shown in Figure 10. The CECBO exhibits faster convergence speed and accuracy compared with standard ECBO with the help of chaos theory. The accuracy and efficiency of the proposed algorithm with 80 CBs can be observed in this case where
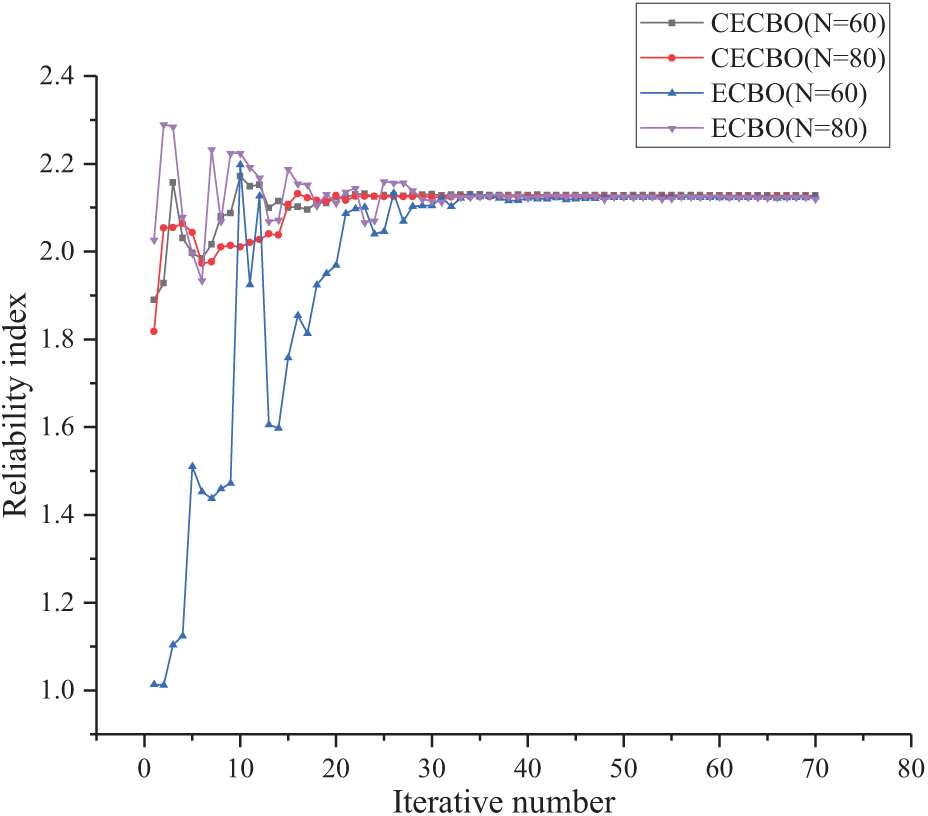
Example 4: comparisons of the histories of the reliability index per iteration.
Comparing different reliability methods
The t-test is a hypothetical testing method utilized to assess the statistical significance of the difference between two algorithms (Walpole et al., 1993). A higher positive t-value indicates the better performance of the first algorithm with regard to the second algorithm and vice versa. The t-value is defined as

where
The t-values between the CECBO and ECBO are also shown in Table 9. The value of the degree of freedom
Comparisons between the CECBO and other methods at α = 0.05 on a two-tailed t-test.
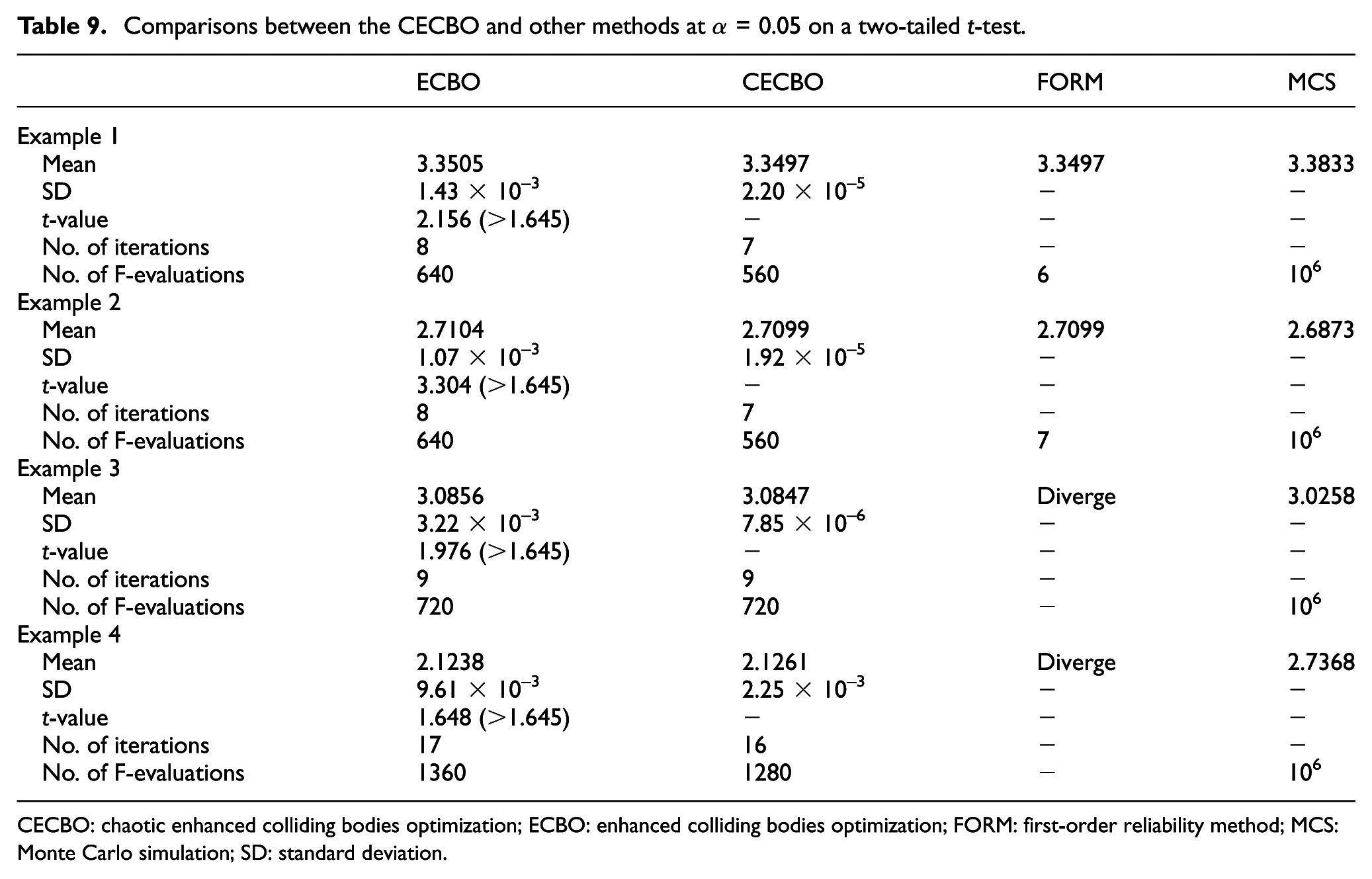
CECBO: chaotic enhanced colliding bodies optimization; ECBO: enhanced colliding bodies optimization; FORM: first-order reliability method; MCS: Monte Carlo simulation; SD: standard deviation.
The experimental results for the four test problems are tabulated in Table 9. It can be seen that the CECBO shows its robustness with relatively lower standard deviation. The FORM has the most minimal values in terms of the F-evaluation indicator in Examples 1 and 2, while it diverged in Examples 3 and 4. In contrast, the CECBO find its best with a relatively fewer iterations than the basic ECBO for the four examples as shown in Table 9. The result of the CECBO algorithm is better than that of the ECBO in terms of the number of F-evaluations. This phenomenon is due mainly to the characteristic of chaos that a slight variation in potential population drastically yields a unique outcome at each iteration (Igiri et al., 2018). This characteristic enables the system to generate dynamic values at every iteration (search), which hence improves the quality of the candidates within the shortest possible time. Moreover, the CECBO significantly reduces the quantity of blind search induced by the pure random search technique and thus decreases the number of F-evaluations. In other words, the logistic map brings different patterns of search behavior for CBs which consequently shows a stronger exploration capability.
The t-test is also introduced to demonstrate the efficiency of these two optimization algorithms. We see that the t-values in the table are all higher than the critical t-value
Discussion
Two numerical examples and two structural problems are presented in the previous section. The performance of the proposed CECBO, FORM, standard ECBO, and MCS for the reliability analysis is shown by the corresponding tables and illustrative diagrams. As seen from the previous figures, the FORM shows its applicability in numerical examples, whereas it fails to converge in structural examples such as Examples 3 and 4 due to the high nonlinearity of the limit state function. By contrast, the proposed algorithm and standard ECBO show their robustness and relatively rapid convergence speed in all examples including numerical and structural examples, which proves the successful application of the meta-heuristic algorithm for solving the nonlinear reliability problem. Moreover, the chaos-based algorithm shows superiority to the random-based algorithm in terms of accuracy and efficiency. For all the tests in this work, the CECBO enables to obtain the more accurate result with the lower computational cost than ECBO, because of the better chaotic local optimization strategy and dynamic chaotic search technique in CECBO.
Since nonlinearity is strongly tied to a vast part of engineering relations, the FORM is not applicable in many engineering problems (Roudak et al., 2017). Referring to the corresponding tables and illustrative diagrams, the proposed algorithm enables to tackle these problems with good accuracy and efficiency. This phenomenon is attributed to the utilization of chaos map in the proposed CECBO. Therefore, it is concluded that the efficiency of standard ECBO has been improved in the proposed algorithm, and it can be regarded as an alternative to solve engineering reliability problems.
Conclusion
The ECBO not only is an efficient algorithm for solving global optimization problems with continuous variables, but also shows many advantages such as facility of implementation in structural reliability analysis. In this article, another chaotic version of the ECBO algorithm named CECBO is proposed to improve its performance, in which chaotic search technique and dynamic search range are embedded to the ECBO. Random sequences in the ECBO are replaced by chaotic sequences generated from chaotic maps to enhance local search ability. Four examples involving numerical problems and structural problems illustrate the proposed method. The results of test examples indicate that the proposed algorithm is accurate and as simple as the ECBO but show superiority in terms of convergence and robustness. Therefore, the proposed CECBO algorithm can serve as an efficient method for structural reliability analysis compared to other methods existing in the literature.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was jointly supported by the Natural Science Foundation of Guangdong Province (No. 2016A030313544), Foundation of Guangzhou Science Technology and Innovation Commission (No. 201610010159), and National Natural Science Foundation of China (NSFC; Nos 11402097, 51678278, and 11272361).