
Abstract
Designing a lightweight floor to prevent annoying vibrations induced by human activities is still a challenge because numerous factors need to be considered. In consequence, there is still a lack of reliable models and adequate design guidelines pertinent to the vibration serviceability of cold-formed steel floor systems. To facilitate understanding the fundamental concepts of lightweight floor vibrations for serviceability design, a newly proposed damped plate-oscillator model was adopted in this research to predict dynamic responses of cold-formed steel floors induced by human walking. Three loading methods were developed based on this model. By using these loading methods, comprehensive parametric studies involving step frequencies, mass ratios, damping ratios, walking paths and end-support restraints were conducted. The present analytical studies show that the influence of moving or stationary occupants depends on the mass ratio of occupants to the floor and its significance could be negligible for small mass ratios. In addition, the boundary restraints at floor end-supports may not always reduce floor responses. On the contrary, relatively larger responses could be excited by human walking for the restrained floors having the fundamental frequency close to the multiple of the footstep frequency.
Keywords
Introduction
Background
Vibration serviceability concerns of cold-formed steel (CFS) floor systems, despite their high likelihood and importance, have not been properly addressed in current design and construction practice. In particular, the North American standards (AISI-S100, AISI-S230, AISI-S240 and AISI-S400), which govern the design of CFS structures in Canada, Mexico and United States, have not even mentioned the issue of possible human-induced vibrations in CFS floors. If this issue is not appropriately taken into consideration in design, it may result in a negative impact on the CFS framing systems, particularly in the market of residential building construction.
Designing a CFS floor to prevent annoying vibrations induced by human activities can be highly complicated, which is affected by numerous factors such as human perception of vibrations, human-induced excitations and structural properties (natural frequency, modal mass and damping). More specifically, quantifying human acceptance of vibration is probably the most difficult aspect of the floor vibration serviceability problem and involves complicated biomechanical approaches. It should be acknowledged that complex engineering problems such as vibration of different floor systems may not have final or universal solutions and need to be reduced and simplified to achieve a clearer picture of the governing relations. Design criteria and methods for floor vibration serviceability should capture the most important features, and the corresponding performance parameters of the criteria should be measurable, calculable and explainable. In this manner, from the practical perspectives of structural engineering, the influence of human excitation and floor properties on vibration serviceability due to human walking is investigated herein. The critical factors affecting vibration performance of CFS floors are analysed by parametric studies.
Literature review
Over the past few decades, a few experimental studies have been done on vibration performance of CFS floor systems (Kraus, 1997; Kullaa and Talja, 1998; Linehan et al., 1978; Ohlsson, 1982; Parnell et al., 2010; Xu et al., 2002). A better understanding of the important factors that influence vibration performance has been achieved. However, there is still a lack of reliable analytical models applicable to the vibration serviceability of CFS floors. On the other hand, a substantial amount of research efforts have been devoted to model the human-induced vibration of footbridges and long-span composite-steel floors. Among them, a variety of approaches have been reported in the literature for modelling human walking excitations. The simplest one (Ellingwood and Tallin, 1984; Mello et al., 2008; Rainer et al., 1988) only considers the concentrated force induced by human walking. Since human occupants not only generate loads but also behave as dynamical systems interacting with structures, known as human–structure interaction (HSI; Shahabpoor et al., 2017), more realistic estimations on the floor responses have been developed by taking into account of HSI. Recently, inverted pendulum models (IPMs; Bocian et al., 2012; Macdonald, 2009), bipedal models (Gao et al., 2017; Qin et al., 2013) and mass–spring–damper (MSD; Caprani and Ahmadi, 2016; Shahabpoor et al., 2013) models have been implemented to describe a human body as a dynamical system. An extensive review of these models can be found in Shahabpoor et al. (2016b). However, the IPMs and bipedal models are complicated and lack experimental validations. Existing MSD models treated the vibrating structure as either single-degree-of-freedom (SDOF) or one-dimensional structures (i.e. a simply supported beam), which cannot simulate the realistic behaviour of floors and probably produce erratic results (Pavic and Reynolds, 2002). Most recently, the authors developed a damped plate oscillator model to simulate the coupled floor-occupant systems (Zhang et al., 2017). In this model, occupants are represented by a damped SDOF oscillator (i.e. a classic mass-spring-damper), and the floor is modelled by an orthotropic plate. By using this analytical model, the dynamic properties of the coupled floor-occupant systems were obtained and compared with the test results of CFS floor systems with stationary occupants.
Furthermore, although the effect of HSI has been addressed through analytical modelling, few attempts have been taken to implement those analytical models into practical design for vibration serviceability. For instance, it has been known that the intensity of the dynamic interaction between the structure and human occupants is influenced by the mass ratio of human to structure, but the relationship between the effect of HSI and mass ratios was still unclear. Ohlsson (1982) defined heavy floors as those where the presence of a human does not significantly change modal masses, natural frequencies and modal damping ratios. Floors with a modal mass of more than 1000 kg in all modes of interest are classified as heavy floors. Takabatake (1998) studied the effect of human mass on the dynamic deflections of a clamped concrete slab and concluded that the effect is negligible. In that case, human mass is 65 kg, and the slab mass is around 720,600 kg. The mass ratio of human to slab is 0.00009. National Building Code of Canada (NBCC, 2005) suggested that a floor with weight of 5 kPa is heavy floor, one with weight of 2.5 kPa is medium and one with 1 kPa is light. Based on these classifications, lightweight CFS floor systems in present research can be categorized as the lightweight floors. However, the significance of the effect of the HSI on CFS floors is uncertain. Thus, the influence of the mass ratios on the HSI for CFS floors should be investigated. In a similar way, some other parameters in human-induced vibration such as step frequency, damping ratio and walking path also significantly influence the floor response and should be examined again together with the HSI.
In addition, current CFS framing systems such as platform framing, balloon framing and ledger framing are not simple support systems. A degree of rotational restraint at ends of floor joists is presented due to the gravity loads from upper storeys and floor-to-wall fixtures (Ayhan and Schafer, 2019; Zhang et al., 2019a). Such restraints at in situ conditions of floors have a considerable influence on their dynamic properties (Xu et al., 2018). Thus, the dynamic responses of CFS floors with restrained end-supports should also be studied.
Objectives and organization
The primary objective of this research is to identify the critical parameters influencing CFS floor vibrations in analytical approaches to prevent the annoying floor vibration. Different loading methods were developed based on the newly developed damped plate-oscillator model to predict floor responses induced by human walking. Parameters being investigated in this study are step frequency, mass ratio, damping ratio, walking path and end-support conditions. Influences of the parameters on floor vibrations were discussed for the practical design of vibration serviceability of CFS floors.
This article is organized as follows. First, three loading methods are introduced to predict the floor response caused by human walking. Then, extensive parametric studies were presented and the results of parametric studies and their application in practical design were discussed, followed by summarizing key findings of this study in conclusions. In addition, floor properties and acceleration evaluation parameters are provided in Appendix.
Floor responses induced by human walking: loading methods
In this section, three different loading methods were developed by using the damped plate-oscillator model in Zhang et al. (2017).
Moving force
As shown in Figure 1, human walking was modelled by using a single-footfall force loading on the footprints (i.e. the position of the feet during walking) in a sequence of footsteps. For the location of a footprint is

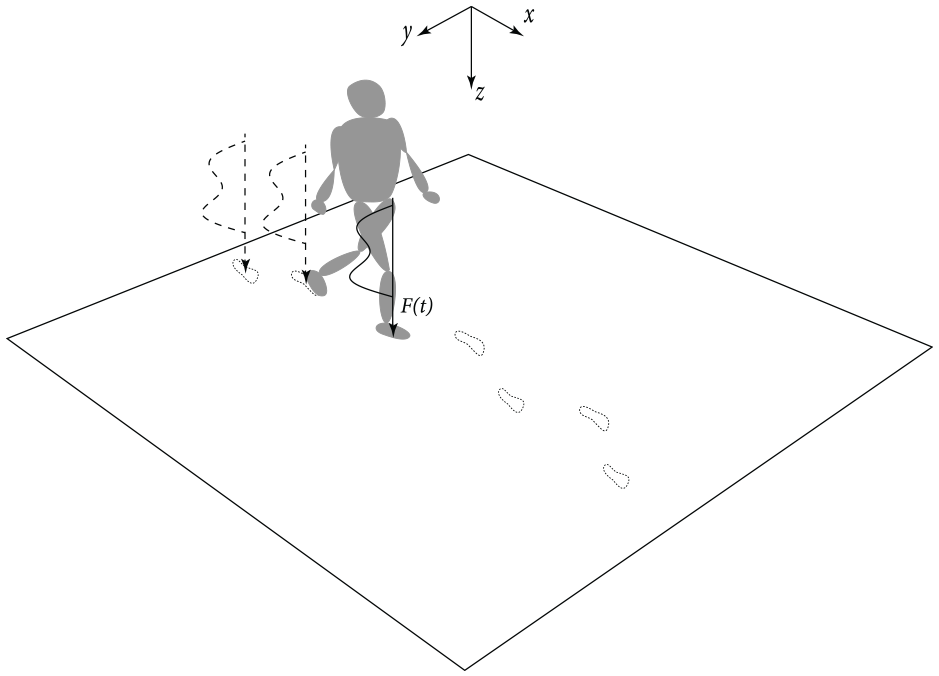
Moving force loading.
where

where G is the weight of a human body,

Figure 2 illustrates the single-footfall force with 2 Hz walking frequency.
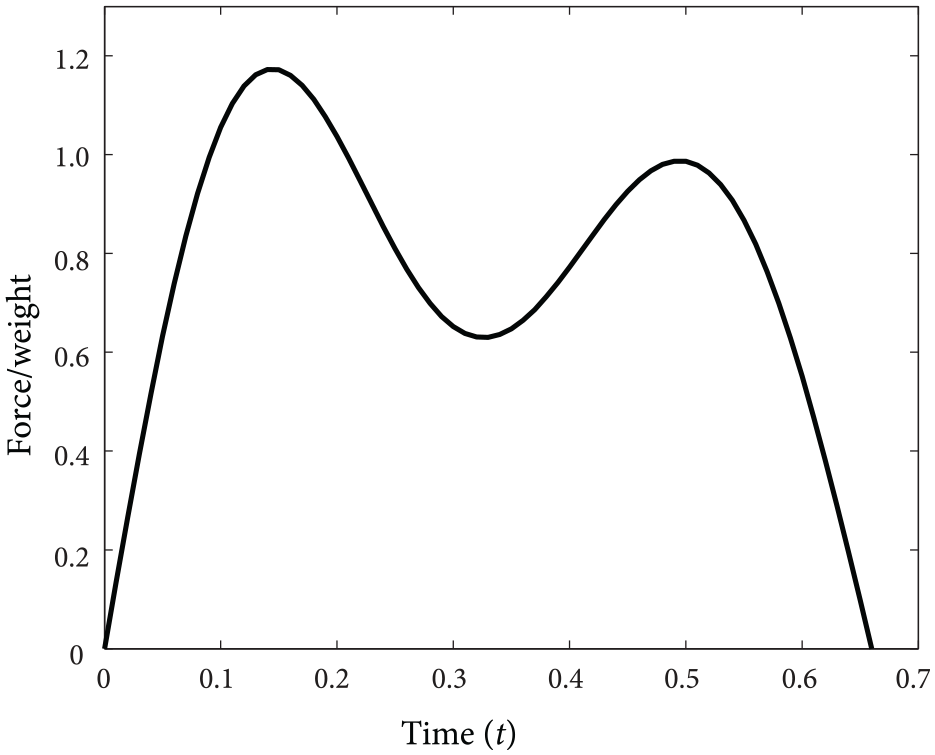
Single-footfall force.
It is known that there is a short time period when both feet of a occupant are contacting the floor, that is, one foot initials contact the floor with ‘heel strike’, while the other foot leaves with ‘toe off’, which gives an overlapping between two feet during the walking process (Racic et al., 2009). Then, the duration of single footfall
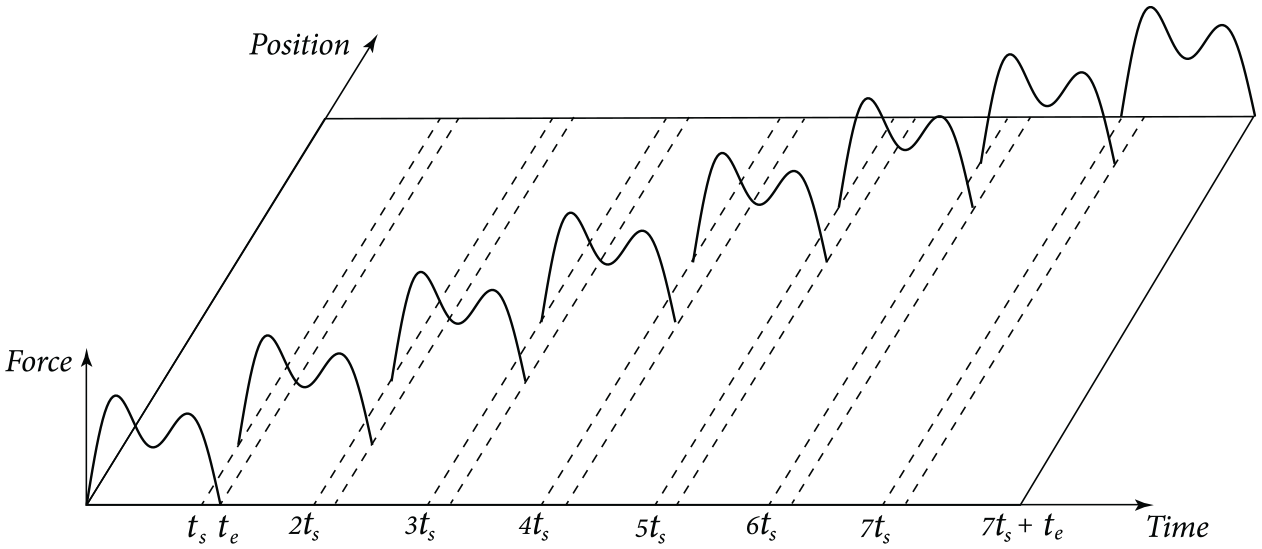
Loading scheme of single-footfall forces.
Moving damped-oscillator
In order to consider HSI during human walking, the human body can be simulated as a heavily damped-oscillator moving on a structure as shown in Figure 4. The floor response for every footprint can be obtained by placing the oscillator with dynamic properties of human body at the footprint together with the footfall loading. The model properties of walking humans can be adopted from Shahabpoor et al. (2016a). The loading scheme is also the same as shown in Figure 3. Then, the total responses during human walking on the floor can be obtained from the principle of superposition. Such method of predicting the dynamic response of floor vibration is denoted herein as moving damped-oscillator (MDO), which can be developed based on the damped-oscillator model in Zhang et al. (2017) with

Moving damped-oscillator loading.
Moving and stationary damped-oscillators
Human occupants do not only excite the floor systems but also receive the vibration response. CFS floors are commonly used in residential constructions, where human walking normally present together with standing or sitting occupants. Human occupants that perform walking can be referred to as moving or active occupants. Other humans sitting or standing on the floor may be the passive ones who were referred to as stationary occupants (Pedersen, 2011). Besides difference in loading, the dynamic properties of human body also differ between the moving and stationary occupants (IStructE/DCLG/DCMS Working Group, 2008) as well as acceptability of vibrations (ISO 10137, 2007). It is known that a walking person accepts much larger vibrations than a stationary person (Ohlsson, 1986). In residential occupancies, the thresholds of vibrations are determined by a seated person rather than one that is standing or in motion (Onysko et al., 2000). More recently, Dang and Živanović (2016) found that the vibration perception of a pedestrian is one to two orders of magnitude greater than that typical of a standing person, and complaint thresholds also increase as the speed of walking increases. Some other experimental studies on pedestrian perception of human-induced vibration were reported in Ma et al. (2018). Thus, simultaneously modelling moving and stationary human is desirable to determinate the vibrations felt by a stationary person (receiver), sitting or standing on the floor, when another person (impactor) applies a footfall impact at any other locations on the floor.
Therefore, a moving and stationary damped-oscillators (MSDO) model can be developed to predict the dynamic response of floors with moving and stationary human occupants. As illustrated in Figure 5, the moving occupant is modelled as the damped-oscillator moving on the floor from one footprint to next footprint, and the stationary occupant is the oscillator staying at a fixed location. The properties of the moving oscillator and the stationary oscillator were selected for sitting human model from Coermann (1962) and walking human model from Shahabpoor et al. (2016a) and the properties are also listed in Table 4 in Zhang et al. (2017). Similar to that of MDO model, the load scheme in Figure 3 and the principle of superposition can be applied to obtain the responses at the location of the stationary occupant, while the other occupant is walking on the floor.
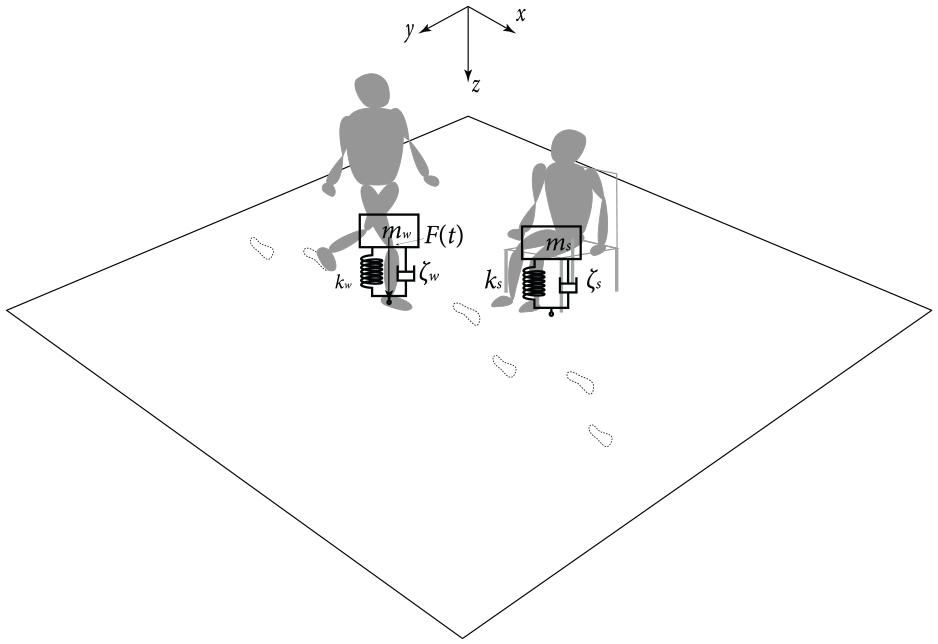
Model of moving and stationary damped-oscillators (
Numerical procedure
Dynamic responses of floors due to human walking can be obtained numerically by using the methods of moving force (MF), MDO and MSDO in the following steps:
Input the geometric parameters and structural properties of floors and the mechanical characteristics of human occupants with their positions.
Determine the parameters of human walking and footprints.
Obtain the natural frequencies and damping ratios of the unoccupied floors.
Solve equation (18) of Zhang et al. (2017) numerically for each footprint (i.e. the Runge–Kutta method) and determine the corresponding acceleration of the floor by using equation (27) of Zhang et al. (2017).
Sum the dynamic responses of each footprint based on the loading scheme in Figure 3.
Parametric studies
Floor vibration due to human walking is primarily influenced by step frequency, floor damping ratio and walking path. As stated in section ‘Introduction’, the significance of the effect of HSI depends on the mass ratio of human to the floor. Moreover, the effect of end-support conditions on floor vibration performance has recently been addressed by several researchers (Jarnerö et al., 2015; Ussher et al., 2017; Zhang et al., 2019a) for timber floors. Similarly, the end-support conditions should be considered in the design for CFS floors. In total, five parameters were studied: step frequency, mass ratio, floor damping ratio, walking path and end-support condition.
Two different CFS floor configurations were adopted in the parametric studies, and their structural properties, the damping ratio of the first mode (
Step frequency
For a normal walk on a horizontal surface, the step frequency (i.e. footfall rate) range was found between 1.5 and 2.5 Hz (Bachmann and Ammann, 1987). It has long been known that the step frequency dominates the resulting dynamic load (Bachmann and Ammann, 1987). In general, the peak of the force of single-footfall shown in Figure 2 increases with the step frequency (Wheeler, 1982). Thus, for relatively higher step frequency, a larger dynamic response will be induced. Furthermore, if the natural frequencies of floors are in coincidence with one multiple of the step frequency, resonance response will occur, and the magnitude may be greater than that of the higher step frequency.
In present parametric studies, the influence of the step frequency on the dynamic response of the lightweight steel floors induced by human walking was first investigated by using the MF, MDO and MSDO methods, respectively. LF17.0A in Table 1 was selected and with an 80 kg human walking parallel to the joists. For simplicity, the damping ratio of the floor was taken as 0.015 and the step length was 0.7 m. The step frequency varies from 1.5 to 2.5 Hz. The root mean square (RMS) values of acceleration history are illustrated in Figure 6 for three loading methods. It can be found that the RMS values have an upward tendency with the increase in the step frequency. However, significant gains can be observed at the step frequencies of 1.8 and 2.1 Hz, which may result from their multiples, which were matched to the fundamental frequency of the floor of LF17.0A (i.e. 12.6 Hz as shown in Table 1), and as a result, resonances occur at these frequencies. These findings support the previous discussion on the influence of step frequency.

The influence of the step frequency on the dynamic response of floor.
Mass ratio
As mentioned before, the effect of HSI is significant if the human mass is comparable to that of the structure but is negligible when the human mass is relatively small comparing to the mass of structure. The relationship between the effect of HSI and the mass ratio was herein studied. To create different mass ratios, LF14.5B in Table 1 was adopted with various masses of human occupants. The RMS values of the acceleration histories were calculated from two loading models: MF and MDO. The comparison is illustrated in Figure 7 as well as their difference. It can be seen that the differences between the results obtained from MF and MDO increase along with increasing mass ratios, which indicates that the influence of HSI becomes more significant with the increase in the mass ratios of human occupants to floors. In particular, when the mass ratio of human to the floor was less than 0.05 such as LF17.0A shown in Table 1, the difference was negligible and the effect of HSI was insignificant. In contrast, the influence of HSI was significant for the mass ratio greater than 0.1 such as that of LF14.5B.
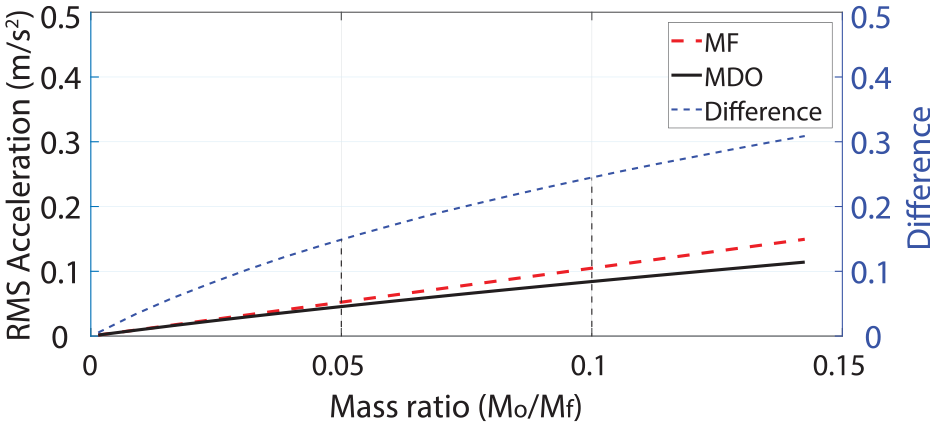
The influence of mass ratio on the dynamic response of floor induced by human walking (
Damping ratio
Two floor specimens shown in Table 1, LF14.5B and LF17.0A, were adopted to investigate the influence of floor damping ratios within the range of 0.005–0.06. The step frequency was assumed as 2 Hz and the step length was 0.7 m. RMS and maximum transient vibration value (MTVV) in Appendix 2 obtained from three loading methods are shown in Figures 8 and 9. It can be found from Figure 8 that the RMS accelerations obtained from MF model decreased rapidly with the increase in the damping ratio in the range between 0.005 and 0.02. However, for MDO and MSDO models, the decrease rates were considerably slower and insignificant. Thus, it can be concluded that the damping ratio of the floor may not play an important role in the floor vibration for LF14.5B because the effect of HSI was significant. Furthermore, although the effect of HSI was not notable for LF17.0A, the damping associated with human occupants also introduce significant damping to a floor. Then, the influence of damping of unoccupied floors does not importantly change the floor response as illustrated in Figure 9.
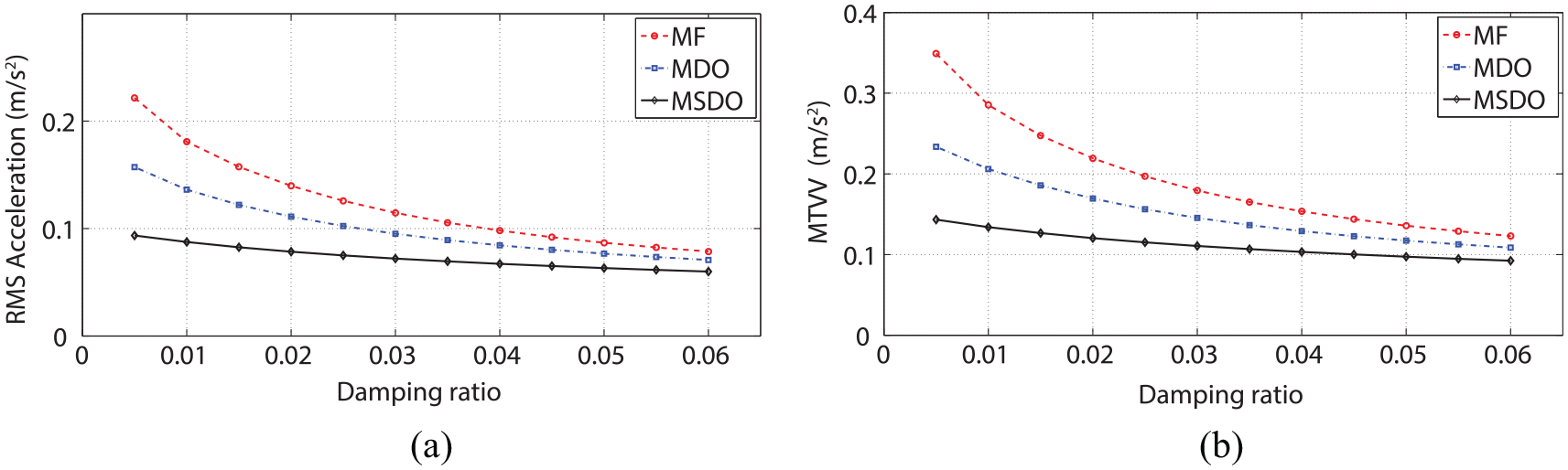
The influence of damping ratio on the dynamic response of floor specimen LF14.5B induced by human walking: (a) RMS acceleration values and (b) maximum transient vibration values (MTVV).

The influence of damping ratio on the dynamic response of floor specimen LF17.0A induced by human walking: (a) RMS acceleration values and (b) maximum transient vibration values (MTVV).
Walking path
Human occupants may walk randomly on floors and change path direction frequently, which can be either unexpected or unanticipated in advance. For the reason of simplicity, the occupants were assumed to walk across the structures along a specific path suitable for producing maximum responses even though it is rarely encountered in everyday life. In the context of residential and office floors, it is widely accepted that footfall loading induced by a single human has proved to be the primary source of vibration disturbance (Pavic and Reynolds, 1999). The goal of this parametric study was to determine the difference of the floor responses associated with four different walking paths: parallel and perpendicular to the floor joists, diagonal path and circular path as shown in Figure 10. Both test results and analytical predictions obtained from the loading methods were presented herein to evaluate the influence of different walking paths.
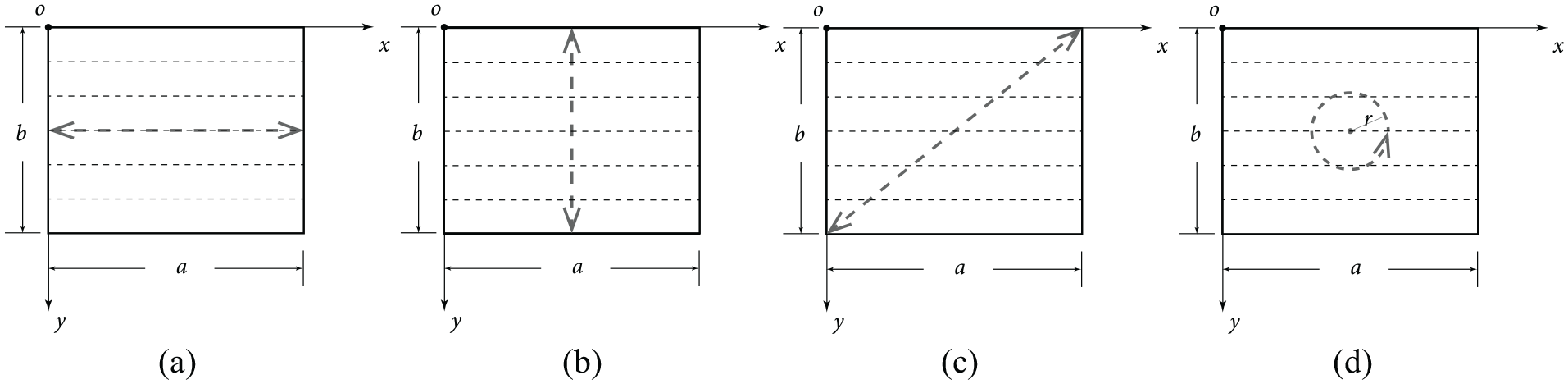
Walking paths on the floor: (a) parallel, (b) perpendicular, (c) diagonal and (d) circular.
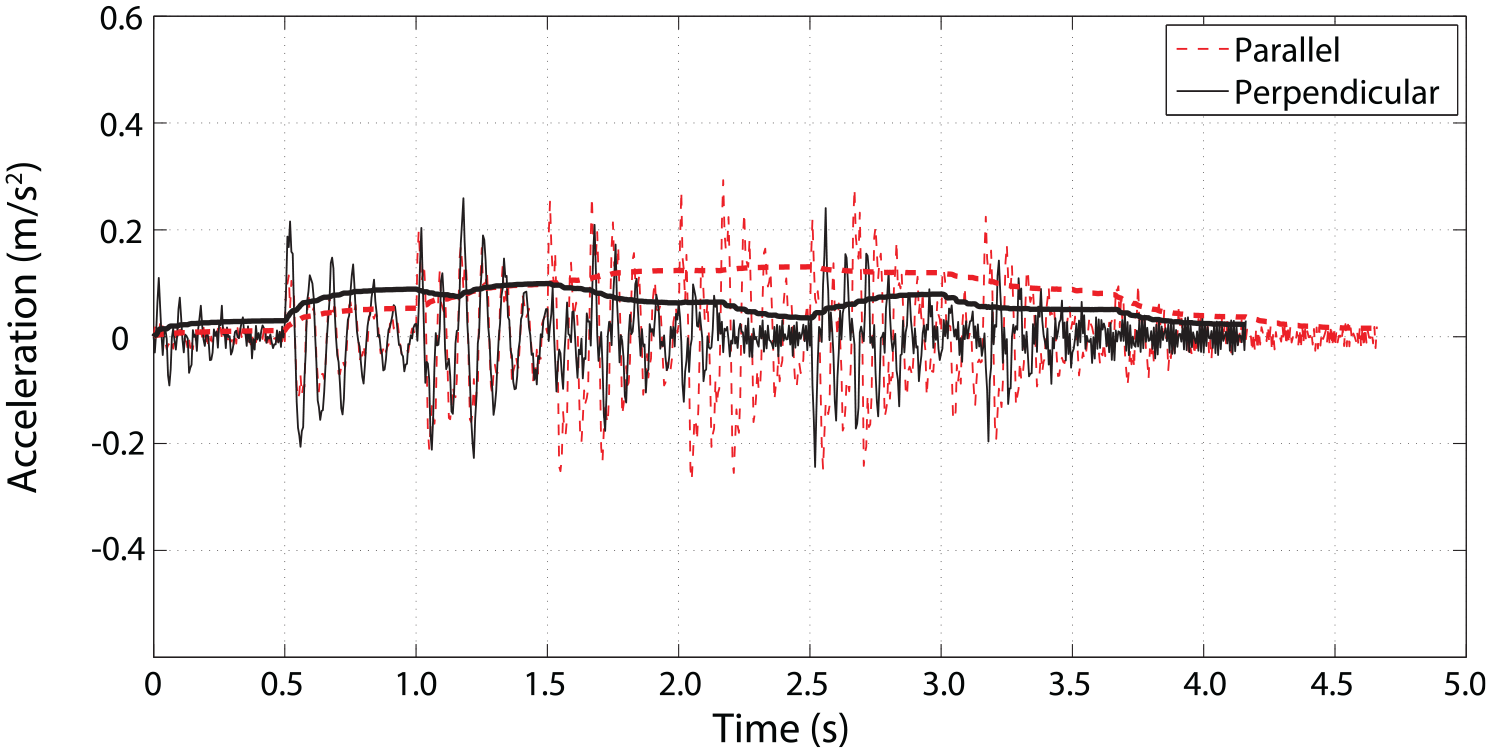
Walking tests reported in Davis (2008), Parnell (2008) and Parnell et al. (2010) were performed by an 82-kg man walking perpendicular and parallel to the direction of the floor joists. Test results of LF14.5B and LF17.0A in Table 1 are plotted in Figure 11. It can be observed that human walking perpendicular to the joists produces greater acceleration response for both floor specimens. This result may be because only edges at the joist ends are supported and the edges parallel to the joists are free. Thus, the perpendicular path will be more critical than the parallel path. On the other hand, in the analytical modelling, four edges of the floor specimen of LF17.0A were assumed as simply supported. The acceleration histories and running RMS values were obtained numerically as shown in Figure 12. It can be found that human walking perpendicular to joists would not produce larger responses than those induced by human walking parallel to joists for the simply supported LF17.0A.
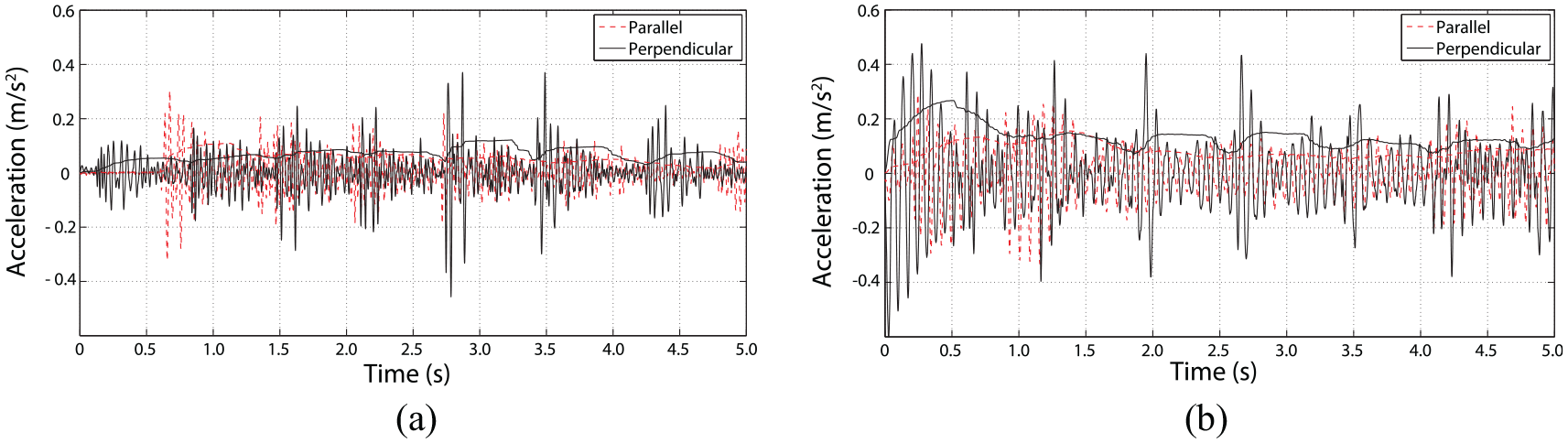
Acceleration histories and running RMS values (the bold lines) of floor specimens induced by human walking parallel and perpendicular to the joists: (a) LF14.5B and (b) LF17.0A.
Predicted acceleration histories and running RMS values (the bold lines) of LF17.0A induced by human walking parallel and perpendicular to the joists.
The second comparison was performed for human evaluation tests (one human subject walking on the floor and the other occupant sitting on the chair to evaluate the vibration) reported in Liu (2001) and Tangorra (2005). The floor specimen was built by using CFS joists and OSB panel with edges at the joist-ends partially restrained against rotation and the other two edges free. Acceleration histories of three walking paths, the parallel, perpendicular and diagonal path, were recorded and the signal length was
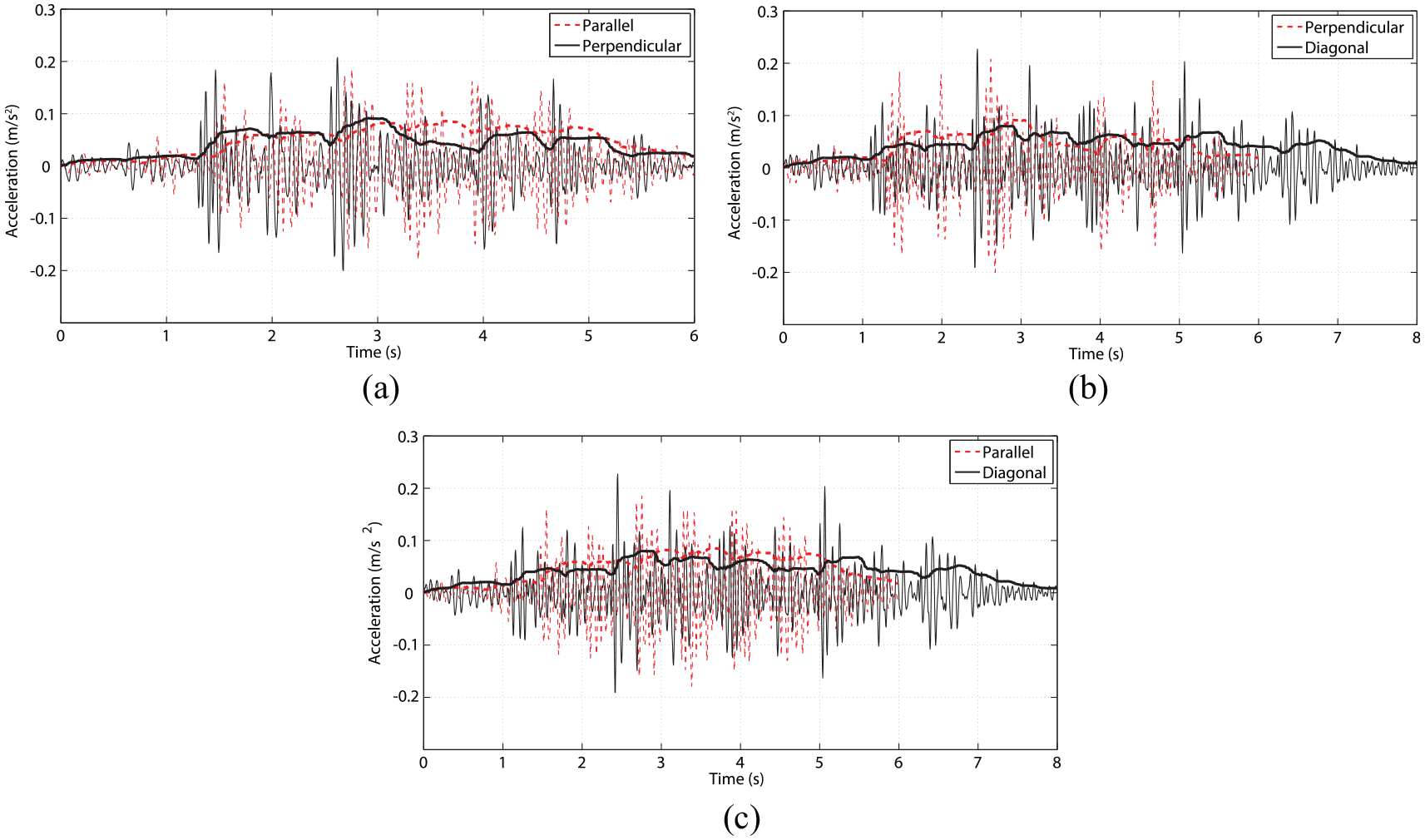
Acceleration histories and running RMS values (the bold lines) of floor responses induced by human walking along different paths: (a) parallel versus perpendicular, (b) perpendicular versus diagonal and (c) parallel versus diagonal.
What was not investigated in the tests of Liu (2001), Tangorra (2005) and Parnell et al. (2010) was walking with a circular path on the floor, as shown in Figure 10(d). The circular path can be investigated by the proposed loading models either MDO or MSDO. Figure 14 illustrates the dynamic responses induced by human walking perpendicular to the joists as well as walking along the circular paths on the floor model of LF14.5B with four edges simply supported. The acceleration responses were obtained by MDO model and the radius of the circular path shown in Figure 10(d) was set as same as the step length. It can be observed from Figure 14 that the response of circular path was almost the same as that of perpendicular path.
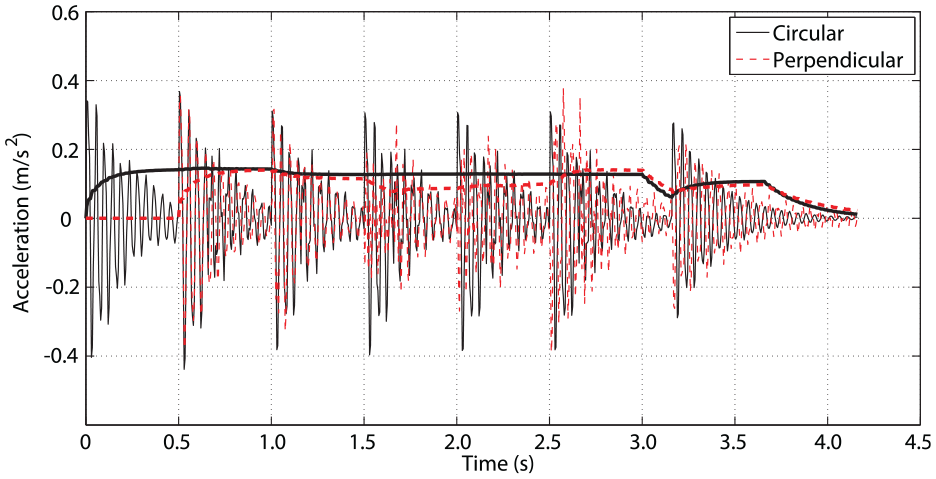
Dynamic responses induced by human walking along different paths on LF14.5B.
In summary, from the test results and analytical predictions, it can be concluded that the dynamic responses of floors induced by human walking are dependent on the human position and the boundary conditions. The walking path should be carefully chosen to obtain the maximum floor responses. For instance, if the floors have free edges, the diagonal path would lead to the largest responses, which can be defined as the worst case for design consideration.
End-support restraints
In order to study the influence of end-support conditions, floor LF17.0A used in parametric studies as shown in Figure 15 was selected herein for the investigation. For the purpose of representing a general boundary conditions from simply supported to fully clamped at the joist ends, a rotational fixity factor r (Zhang and Xu, 2017) was introduced to account for various restraints on end supports. By using the rotational stiffness at

in which
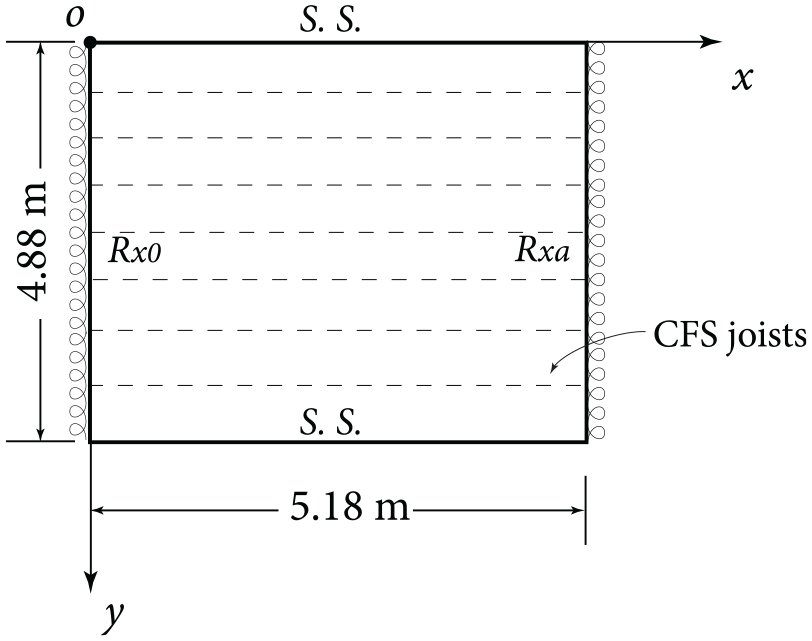
Layout of LF17.0A (S.S. – simply supported).
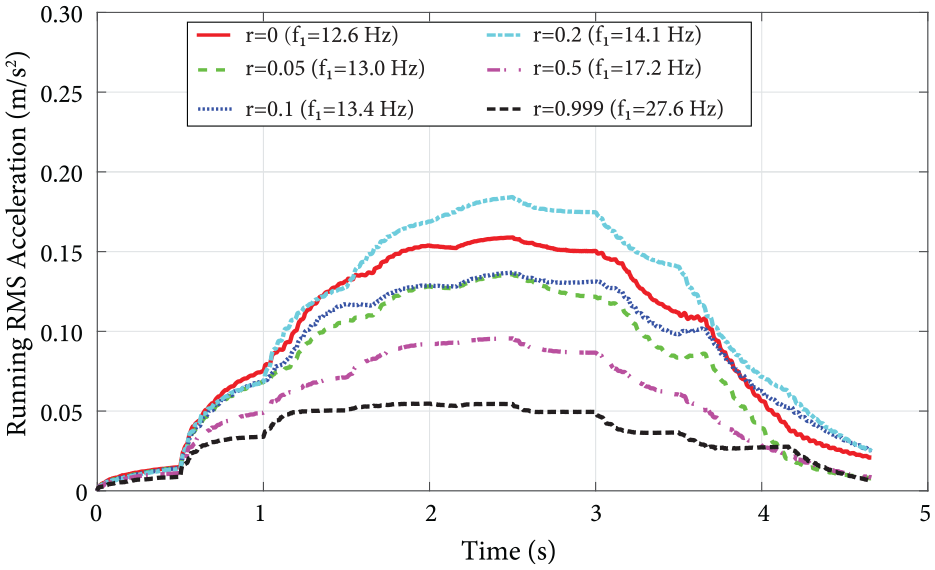
The influence of end-support restraints on the dynamic response of the floor.
It can be observed from Figure 16 that the dynamic responses decrease along with increased rotational restraints on end supports. However, the response of the restrained floor with
Discussion and remarks
Ultra-lightweight floor systems
Based on comparisons between the predictions of floor responses using three different loading methods, it can be concluded that the effect of HSI (i.e. the influence of moving or stationary occupants) highly depends on the mass ratio of occupants to the floor. Furthermore, the parametric study on the mass ratio comes to the same conclusion. Traditionally, it is well accepted that the influence of occupants is negligible for concrete floors (Ohlsson, 1982; Takabatake, 1998) while significant for lightweight floor systems. However, although CFS floor systems are defined as lightweight floors compared with concrete floors, the effect of HSI is not always significant. The present research suggests that the effect of HSI is not evident for CFS floor systems with sheathing panel and concrete topping like LF17.0A but is significant for CFS floor systems with a single layer of cementitious panel or wood panel such as LF14.5B.
Thus, to facilitate the design decisions, CFS floors without concrete topping (only having sheathing panels) can be referred to as ultra-lightweight floor systems and the HSI should be accounted for. However, the effect of HSI could not be considered in the serviceability design for CFS floors with concrete topping. For simplicity, as shown in Figure 7, the mass ratio higher than 0.05 can be used as a rule of thumb to classify the ultra-lightweight floor system. Such ratio limit was determined from the difference of RMS accelerations (difference greater than 15% in Figure 7) in the parametric study of mass ratios. In the future, the floor classification based on mass ratios could be improved for other specific design criteria to decide whether to consider the HSI or not.
Damping benefits from HSI
Damping is always a complicated issue to deal with because the damping capability of a structure is difficult to assess and the scatter in the quantification of damping parameters is large for lightweight floors (Weckendorf et al., 2015). Moreover, on-site measurements of floor responses have demonstrated that damping ratios to be significantly higher than that obtained in laboratory conditions (Toratti and Talja, 2006; Xu and Tangorra, 2007). However, the parametric study on floor damping ratios shows that human occupants significantly increase the damping ratio of floor systems, and the floor own damping ratio has a limited influence on the floor responses. These findings could bring many benefits to design practice. As a result, the inconsistencies on the damping ratio between the laboratory and field studies will be reduced because of the presence of human occupants introducing large damping. Thus, damping ratios obtained from lab tests could be used for designing lightweight CFS floors in practice.
Walking human models
It should be noted that the adopted walking human model herein was derived from tests on a low-frequency footbridge (i.e. 4.44 Hz; Shahabpoor et al., 2016a). However, lightweight steel floors are always treated as high-frequency floors with fundamental frequency larger than 10 Hz. Although this issue does not likely have a significant influence on the results from the practical viewpoint, further research is desirable to be conducted from a biomechanics perspective to develop the human models on high-frequency floors. However, such work is out of the scope of the present research, but the analytical model presented in this article can lay the foundations for future research by implementing different walking human models.
Conclusion
In the present study, the damped plate-oscillator model has been employed to predict the dynamic responses of CFS steel floors due to human walking with consideration of the HSI. Based on this model, three different loading methods were developed: MF, MDO and MSDO and used for parametric studies. The influences of step frequencies, damping ratios, mass ratios, walking paths and end-supports on the floor response caused by human walking have been studied. Some unique insights from this study are summarized as follows:
The influence of HSI on floor response is significantly depending on the mass ratio of human occupants to the floor. For simplicity, if the mass ratio is greater than 0.05 such as CFS floor systems without the concrete topping (e.g. only one layer of cementitious panel or wood panel), the influence of HSI can be significant and is needed to be considered in the design. The type of floor systems could be denoted as ultra-lightweight floors.
Human occupants can introduce considerable damping to lightweight floors. The effect of damping associated with unoccupied lightweight floors has limited influence on the dynamic response of a coupled floor-occupant system. For that reason, the inconsistencies of damping ratios between the laboratory and field studies will be reduced if the damping associated with human occupants are accounted for. Therefore, damping ratios obtained from laboratory tests could be used in the design.
The dynamic responses of floors induced by human walking are dependent on the human position and the boundary conditions. The walking path should be carefully chosen to excite the largest floor responses. For instance, if the floors have free edges, the diagonal path would lead to the largest responses, which can be defined as the worst case for design.
The boundary restraints at floor end-supports may not always reduce floor responses. When the restrained floors have the fundamental frequency close to the multiple of the footstep frequency, relatively larger responses could be excited by human walking. Such influence should be considered carefully for the development of design criteria.
In the end, this study is to help engineers understand the fundamental concepts of CFS floor vibrations, find critical design parameters for serviceability design and ultimately lead to the efficient design of CFS floors.
Footnotes
Appendix 1
Appendix 2
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.