
Abstract
A new physical parameter identification method with a name of EKPF-LS is proposed for shear frame structures under limited inputs and outputs by a combination of extended Kalman particle filter (EKPF) and least square (LS) algorithm. The basic principle of EKPF-LS is to establish the proposed distribution function of the particle filter through EKF-LS. In this method, EKPF is introduced to get rid of the restriction of Gaussian white noise model and reduce the linearization error caused by EKF. Meanwhile, LS is utilized to address the problem of unmeasured excitation estimations. The effectiveness and accuracy of the proposed EKPF-LS method is verified by a numerical example of a four-story hysteretic shear frame under an earthquake excitation and an experimental test of a four-story shear type frame using Gaussian white noise and sine sweep signal as excitations, respectively. Gaussian colored noises are then added to the solved and measured response signals in the numerical example and experimental test, respectively. The results demonstrate that the proposed method can identify the stiffness of shear frame structures effectively and is superior to the existed EKF-LS approach when the structural system is nonlinear structural system or Colored noise model.
Keywords
Introduction
Civil engineering structures in operation usually suffer damage when they are exposed to external environment, working loads and extreme loads. The structural damage in turn causes changes of structural properties, which makes structural system identification (SSI) be a significant task of structural health monitoring (Li and Hao, 2016). In traditional SSI algorithms, external excitations need to be known in advance, however, it is too difficult to install so many sensors to measure all excitations/inputs and responses/outputs from actual engineering structures. Therefore, it is urgent to propose some new SSI methods to deal with structures with limited inputs and outputs.
Typically, structural parameters are divided into two groups: modal parameter and physical parameter. Modal parameters such as natural frequency and mode shape are possible to reflect the overall state of a structure, but it is difficult for them to indicate the local state (Wang and Haldar, 1997). By contrast, physical parameters, for example, mass, stiffness and damping, are intuitive expressions to better reflect both overall and local states of a structure, but it is not an easy task to accurately estimate them (Wang and Haldar, 1994). Some approaches, including frequency domain and time domain methods, have been developed for physical parameter identification in recent years. The frequency domain methods convert the measured input and output signals from time domain into frequency domain by means of transfer function or frequency response function. The remarkable advantage of this kind of methods is to offer an easier computation and a more intuitive interpretation. Nevertheless, the conversion between time and frequency domain often leads to truncation error and energy leakage, which create great challenge on SSI (Noël and Kerschen, 2017; Zhu, 2007). The shortcomings brought by frequency domain methods can be overcome by time domain methods because system parameters are determined by the observed data sampled in time (Noël and Kerschen, 2017).
The recent decades have witnessed the success of time domain methods on structural physical parameter identification due to its convenience and effectiveness (Wang and Cui, 2011). Among them least square (LS) estimation (Lin et al., 2001; Smyth et al., 2002; Yang and Lin, 2005) and Kalman filter (KF) (Yang et al., 2006) are two dominant approaches. Up to now much progress based on LS has been achieved for the physical parameter identification under limited inputs (Ling and Haldar, 2004; Xu et al., 2012; Yang et al., 2007). For example, Wang and Haldar (1994) proposed an iterative least square technique with unknown input (ILS-UI) to identify structural physical parameters and applied it to various types of structures such as shear-type buildings, plane trusses, and etc. Although LS is capable of estimating physical parameters with unknown input, the main drawback of using LS method alone is that it requires output responses at all degrees of freedom (DOFs) to complete physical parameter identification (Hoshiya and Saito, 1984). Unfortunately, this requirement is not satisfied in practical civil engineering. As another main time domain method, KF methods, including extended Kalman filter (EKF) (He et al., 2019; Hoshiya and Saito, 1984; Jin et al., 2016; Koh et al., 1991; Lei et al., 2012; Liu et al., 2016; Yang et al., 2006) and unscented Kalman filter (UKF) (Chatzi and Smyth, 2009; Olivier and Smyth, 2017), play an important role on physical parameter identification. For instance, Olivier and Smyth (2017) employed UKF for structural stiffness and damping identification, however, this approach has a drawback that it needs both output responses at all DOFs and input excitation information in advance. The EKF method and a new method called extended Kalman filter method with a weighted global iteration (EKF-WGI) are separately presented by Hoshiya and Saito (1984) and Koh et al. (1991) for structural physical parameter identification, both of which are only suitable for the cases that input excitations are available whereas output responses are not accessible for all DOFs. In view of KF and LS have their individual advantages and disadvantages, Lei et al. (2012) proposed a new algorithm called extended Kalman filter and least square (EKF-LS), which is exactly a combination of the sequential application of EKF algorithm for the structural parameters and LS algorithm for the unmeasured excitation. In this method, EKF is to linearize models by first order Taylor series expansion. However, the error is produced inevitably during the process of linearization, which leads to an inaccurate parameter identification result. In addition, EKF only behaves well for Gaussian white noise model. By contrast, particle filter (PF) (Beskos et al., 2017; Ghirmai et al., 2005; Sen et al., 2017) as an approximate Bayesian filtering algorithm based on Monte Carlo simulation, is an excellent nonlinear filtering method for nonlinear systems and gets rid of the restriction of Gaussian white noise model (Chatzi and Smyth, 2009). The basic principle of PF is to approximate the posterior probability distribution by finding a set of random samples propagating in the state space. That is to say, the particles are weighted and transmitted according to Bayesian criterion, and then the integral operation is replaced by the sample mean to obtain the minimum variance estimate of the state. However, for a typical nonlinear system it is not an easy task to accurately obtain an expression of the posterior probability distribution. Therefore, the proposed probability distribution function is used instead of the posterior probability distribution function. Based on this, Doucet et al. (2000) put forward a new method called extended Kalman particle filter (EKPF), which establishes the proposed distribution function of the particle filter through EKF algorithm. Compared with EKF, EPKF reduces the linearization error and gets rid of the restriction of Gaussian white noise model. Due to these prominent advantages, it greatly enhances the accuracy of physical parameter identification but creates the problem of computing efficiency as well.
Although EKPF is widely accepted in various fields such as mechanical engineering (Hou et al., 2013), control science (Yang et al., 2009) and aerospace engineering (Lee and West, 2010), it has not been applied in the field of civil engineering before. In order to accurately estimate physical parameters of shear frame structures under limited input and output measurements, EKPF together with LS algorithm is proposed in this paper with a new name of EKPF-LS. The basic principle of EKPF-LS is to establish the proposed distribution function of the particle filter through EKF-LS. In this method, EKPF is introduced to reduce the linearization error caused by EKF. Meanwhile, LS is utilized to address the problem of unmeasured excitation estimations. It should be noted that the main contribution of this paper is to extend the concept of PF to the area of civil engineering and hence a new physical parameter identification method is presented, which not only reduces the linearization error inEKF-based approaches, but also gets rid of the restriction of Gaussian white noise model in theory. The accuracy and effectiveness of the proposed method is investigated by a numerical example of a four-story hysteretic shear frame structure under an earthquake excitation and an experimental test of a four-story shear type frame using Gaussian white noise and sine sweep signal as excitations, respectively. However, it should be noted that EKPF cannot work well on non-Gaussian noises in practical applications. Thus, Gaussian colored noises are added to the solved and measured response signals in the numerical example and experimental test, respectively. The results demonstrate that the proposed method can identify the stiffness of shear frame structures effectively and is superior to the existing EKF-LS algorithm. However, only a demonstration by a small size structure is not enough and the application possibility of EKPF-LS on large size structures will be studied by the authors in the future work.
The rest of this paper is organized as follows. Section 2 and Section 3 introduce the EKF-LS method and the proposed EKPF-LS method, respectively. A numerical case and an experimental test are separately used to illustrate the proposed method in Section 4 and Section 5. Conclusions are drawn in Section 6.
The EKF-LS method
The EKF-LS is specially designed for physical parameter identification of structures under limited inputs and outputs (Lei et al., 2012). Based on this, the new EKPF-LS method, which establishes the proposed distribution function of the particle filter through EKF-LS, is presented. That is to say, EKF-LS not only provides a theoretical foundation for the EKPF-LS, but also offers a comparative result. Thus, it is necessary to introduce the EKF-LS algorithm at first.
The motion equation of a n-DOF non-linear structural system subjected to external excitations can be expressed as

where
In order to identify physical parameters effectively, the state vector is augmented, with the physical parameters are processed as a part of the state vector. As such, the extended state vector of the shear frame structure is defined as

in which

Where
As observed from equation (4), the extended state equation is a nonlinear function of the extended state vector, which can be rewritten as the following general non-linear differential state equation.

However, in practice only a limited number of accelerometers are arranged in actual structures to measure acceleration responses at several DOFs. As such, the discretization of the observation vector is essential, and based on the right term of equation (4) and measurements the discretized observation vector at the
in which D is the matrix associated with the locations of accelerometers.
As shown in equation (6), the discretized observation vector

where
So far, the state equation and observation equation required by the EKF algorithm are obtained and shown as equation (2) and equation (7), respectively. With the observations of

where
Here, it is noted that the state vector is updated in equation (8) through observations including displacements and accelerations. Thus, the EKF-LS is exactly an updated EKF-LS, namely updated EKF-UI. Since the physical parameters to be estimated are wholly contained in equation (8), the successful physical parameter identification depends greatly on the accurate estimation of the extended state vector through a use of EKF.
It is noted here that the superscripts of

where
Normally, it is impossible to obtain the recursive solution for the extended state vector by conventional EKF estimator alone since

As shown in equation (10), the state vector
In theory, EKF-LS is based on the sequential application of EKF for the structural parameters and LS algorithm for the unmeasured excitation. Although it simplifies the complexity of the identification process through a use of first-order Taylor expansion, an error is produced during the local linearization of the extended state vector (Lei et al., 2019). Therefore, it is crucial to introduce a more effective algorithm to reduce the linearization errors caused by EKF-LS. As such, the EKPF-LS algorithm is proposed in the next section.
It should be noted here that if only noisy accelerations are used as measurements, ‘drift phenomenon’ will appear in the identification of displacement and external input (Azam et al., 2015; Naets et al., 2015). However, it will not happen in the stiffness identification, which has been demonstrated by a numerical example of a four-story hysteretic shear-beam building subjected to unmeasured excitation on the top floor of the building (Lei et al., 2012). This paper focuses on the stiffness estimation and ‘drift phenomenon’ does not appear. Nevertheless, the ‘drift phenomenon’ in the process of displacement and external input identification remains a problem not well resolved and hence a further investigation is needed.
The EKPF-LS method
In the EKF-LS method mentioned above, the resultant distribution by EKF linearization cannot well approximate the real distribution of nonlinear equations and the system is limited to Gaussian white noise model (Chen et al., 2005). By contrast, PF utilizes sequential Monter Carlo to approximate posterior distribution by using a set of weighted samples, therefore, it can represent any distribution in theory (Chatzi and Smyth, 2009). On this basis, EKPF, which is suitable for non-Gaussian noise model, is introduced to reduce the linearization error caused by EKF. Meanwhile, LS estimation is utilized to address the problem of unmeasured excitation estimations. With a combination of EKPF and LS, the EKPF-LS algorithm is proposed and detailed step-by-step as follows.
(a) Initialization
Initialize a random particle set of N particles
(b) Importance sampling using EKF-LS algorithm (please refer to Section 2)
The mean value

(c) Update the weights
The weights of the particle are calculated at first according to the observation values of the new state and shown as equation (12).

It needs to be clarified at first that the important sampling function


In equation (14), the PDF of observation likelihood

where
Since the sampling step of the generic PF is suboptimal (Tong et al., 2006), particle swarm optimization (PSO) is introduced to merge into PF and detailed as follows. At first the newest observations are taken into account by defining a PSO fitness function expressed as equation (16). Because of equation (16), PSO is capable of moving all particles toward the one who has the best fitness value. After that, PSO is merged into PF, with the PDF of observation likelihood

where
Finally, the weights can be normalized as

(d) Resampling
The basic idea of resampling methods is to eliminate trajectories which have small normalized importance weights and to concentrate upon trajectories with large weights as well (Hou et al., 2013). Therefore, the degeneracy of the algorithm is created and becomes unavoidable. A suitable measure of degeneracy is the effective sample size Neff. One cannot evaluate the exact value of Neff, but is possible to obtain an estimate of Neff, which is denoted as

If
Thus, the posterior probability estimate of the target state and unknown external excitation are separately calculated as equations (19) and (20) by substituting the new values of


As the extended vector
Numerical example
A numerical example of a four-story hysteretic shear frame structure model as shown in Figure 1 is investigated to verify the accuracy of the proposed method. The motion equation of the model is given by

in which
where
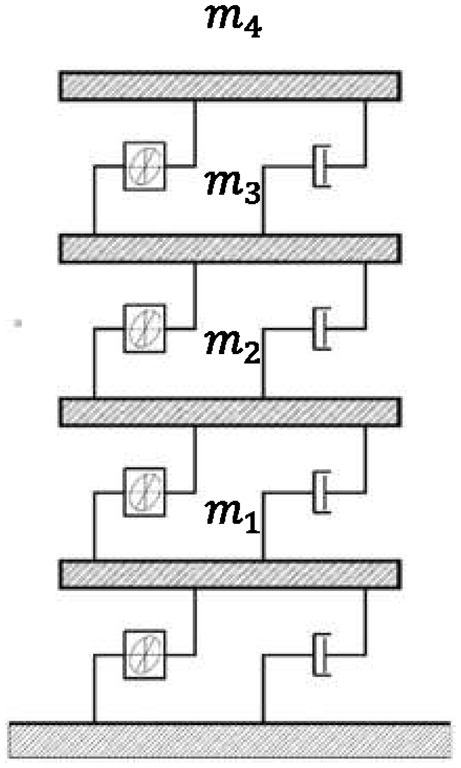
The four-story hysteretic shear frame structure model.
The parametric values used in the numerical study are as follows: mass of each floor m1 = m2 = m3 = m4 = 225 kg; each story stiffness k1 = k2 = k3 = k4 = 4.7×104 N/m, each story damping coefficients c1 = c2 = c3 = c4 = 200 N·s/m, hysteretic parameters are
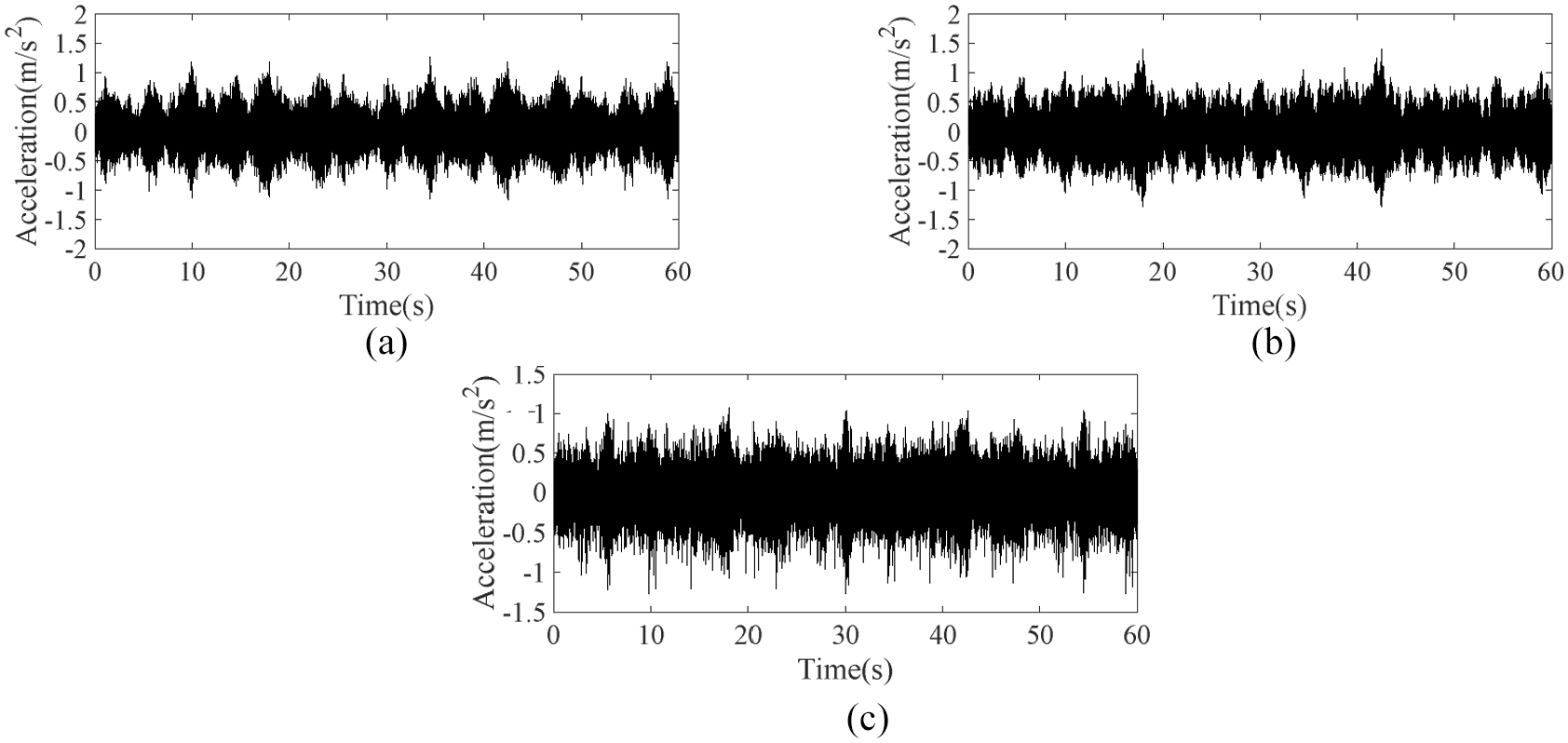
The simulated four-story hysteretic shear frame structure model is subjected to 1940 El Centro earthquake excitation. In fact, the middle segment of this earthquake record, with a length of 25 s and peak seismic acceleration included, is selected for excitation. The Runge-Kutta method is then employed to solve acceleration responses, with the sampling frequency and the sampling duration are 50 Hz and 25 s, respectively. In order to verify the validity of the method under limited inputs and outputs, the 1940 El Centro earthquake excitation is assumed to be unknown, and the acceleration response of the third story is not used in this simulation. Thus, Figure 2 only gives a visualization of the acceleration responses of the first, second and fourth story with a consideration of noise. In order to verify whether the proposed method can get rid of the restriction of Gaussian white noise model, a colored noise defined as e(k) = x(k) + 0.5x(k-1) (k = 1, 2, 3, ⋯) (Pan, 2013), is added to the acceleration responses of each story where x(k) is the Gaussian white noise with mean value of 0 and variance of 0.01.
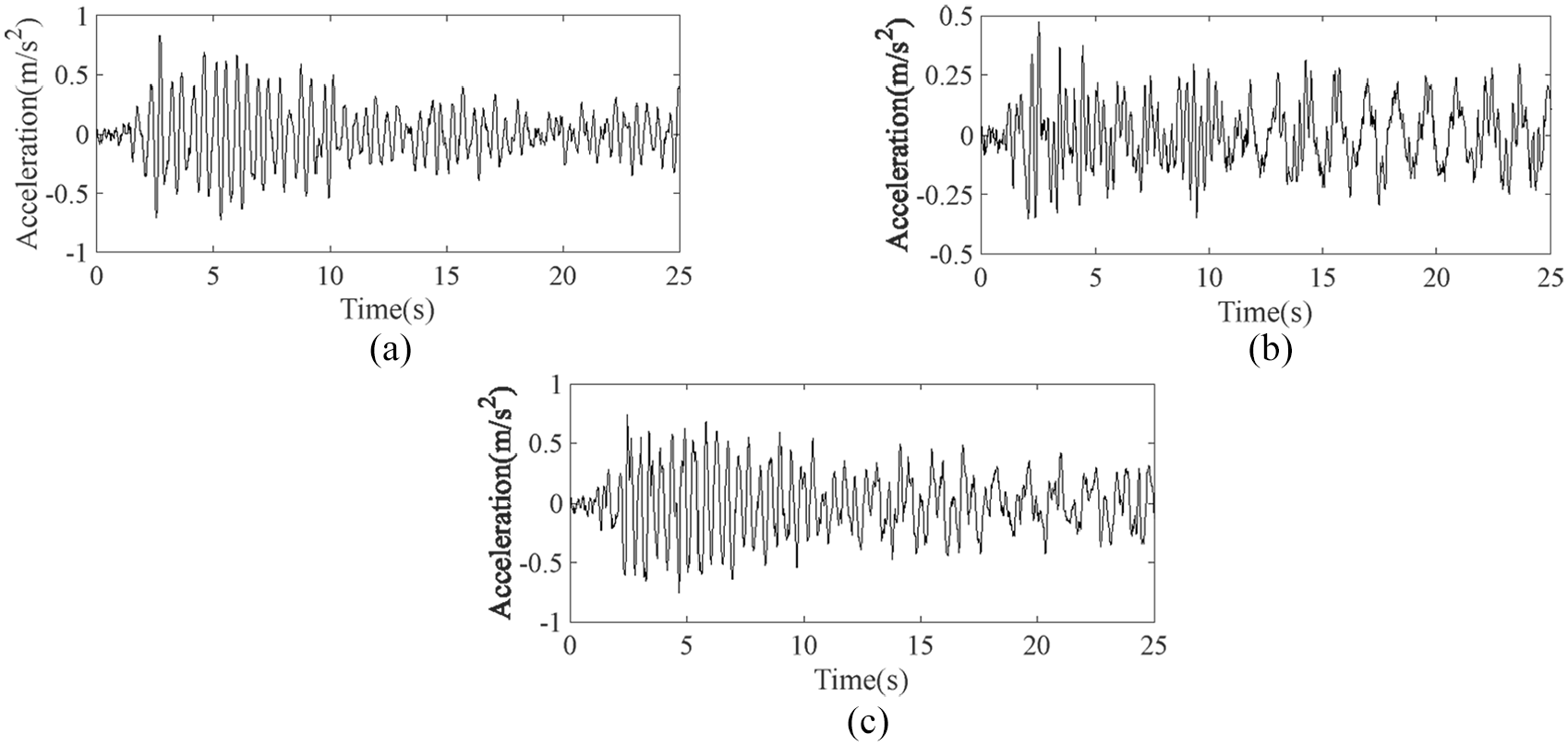
The acceleration responses of the hysteretic shear frame structure model: (a) the 1st story, (b) the 2nd story, and (c) the 4th story.
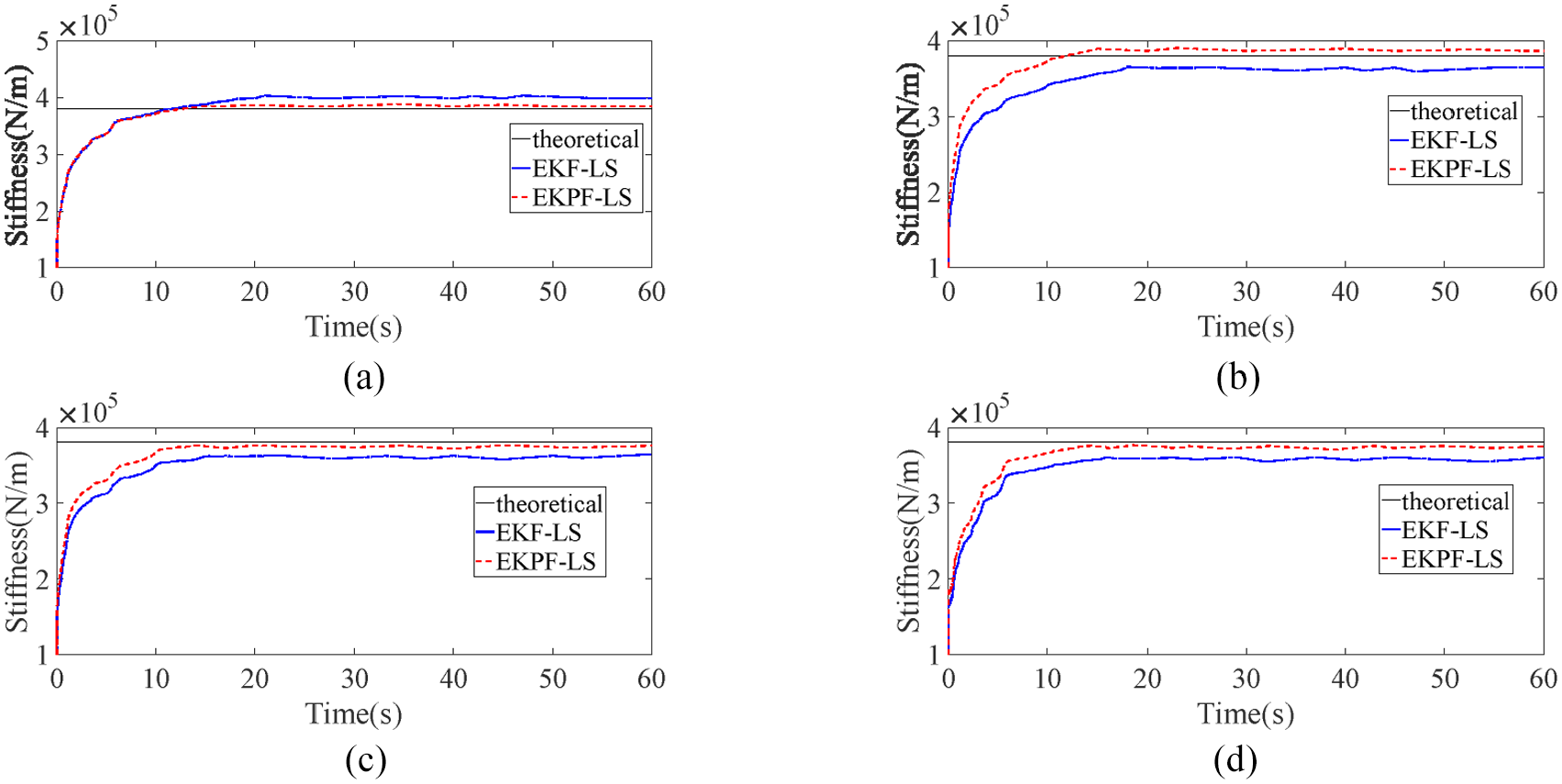
Initial parameter setting: each story stiffness k1 = k2 = k3 = k4 = 2.0×104 N/m, each story damping coefficients c1 = c2 = c3 = c4 = 80 N·s/m, hysteretic force z1 = −10−5 N; z2 = −5×10−6 N; z3 = 5×10−6 N; z4 = 10−5 N, hysteretic parameters are
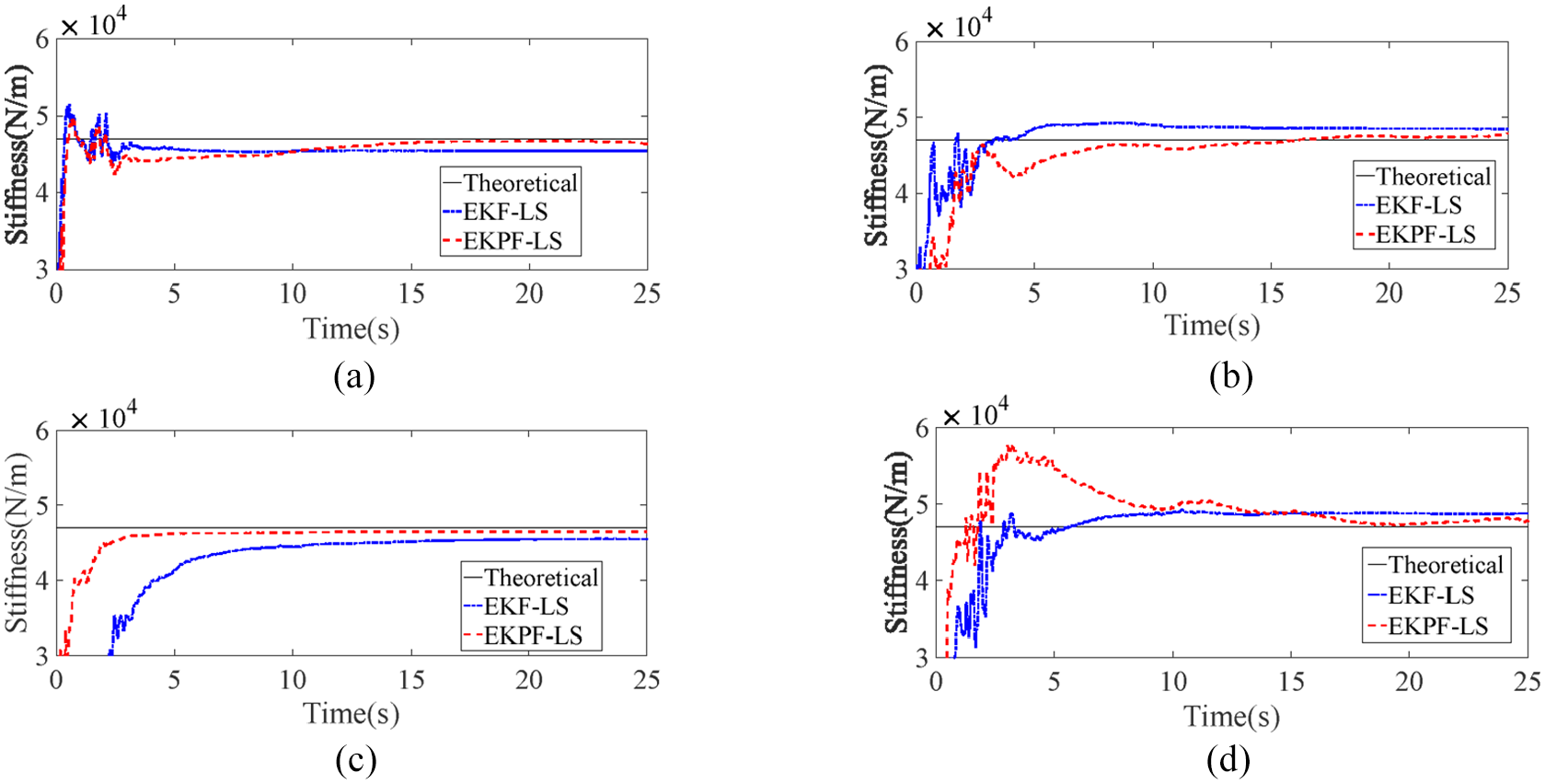
Comparisons of stiffness: (a) the 1st story, (b) the 2nd story, (c) the 3rd story, and (d) the 4th story.
The identified stiffness of the four-story hysteretic shear frame structure model.

Experimental case study
Steel frame structure
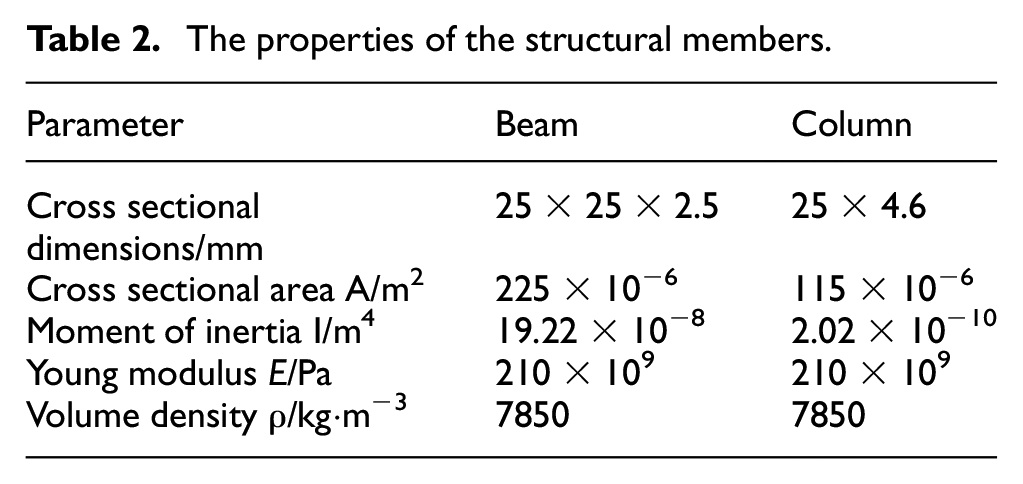
The proposed method is also verified by an experimental test of a steel frame structure. The layout and test rig of the scaled 4-story and 2×2-bay steel frame model are illustrated in Figure 4(a) and (b), respectively. The frame has three bays with each span length of 225 mm, while each story height is set as 200 mm. The material of both beams and columns are Q235, but they are separately made of hollow steel tubes (beam) and thin steel sheets (column). The cross-section sizes and properties of all beams and columns are detailed in Table 2. According to the parameters displayed in Table 4, the mass of each story can be obtained as follows: m1 = m2 = m3 = 4.02 kg, m4 = 3.48 kg. In addition, the theoretical stiffness of each story under the intact state is calculated as k1 = k2 = k3 = k4 = 381 kN/m. Due to the beams and columns are composed of hollow steel tubes and thin steel sheets, respectively, the cross sectional moment of inertia of the beams is much larger than that of the column, and as a result the steel beams exhibit much stronger capability of lateral displacement resistance when compared with the steel columns. On the basis of this, the experimental steel frame model can be regarded as a shear-type frame structure. It should be noted here that the four-story shear-type steel frame is still a linear but not a nonlinear structural model. Future work will be dedicated to experimentally verify the effectiveness of the proposed method on nonlinear models.
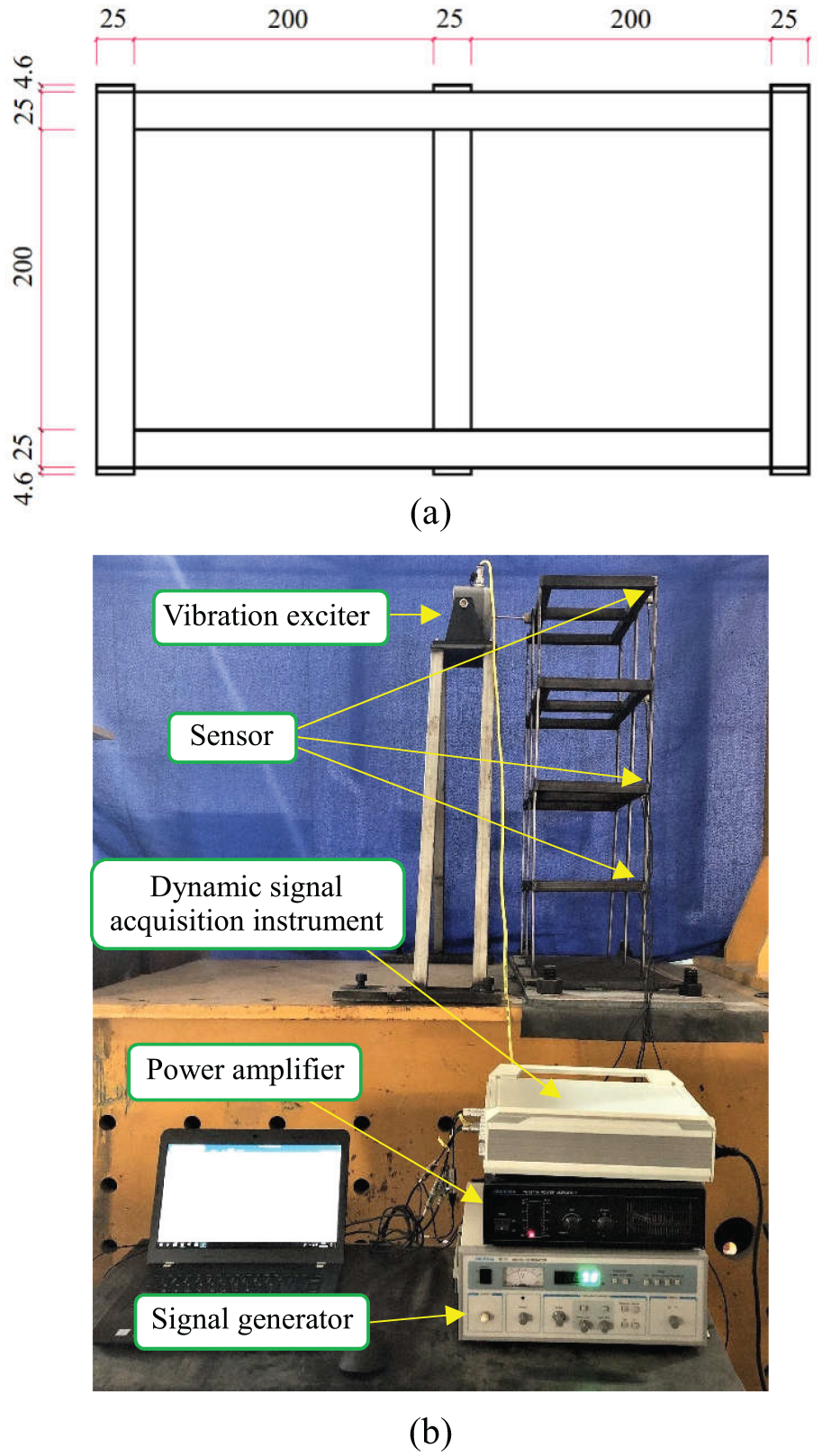
The scaled experimental steel frame structure: (a) the layout plan (Unit: mm), and (b) the test rig.
The properties of the structural members.
The Gaussian white noise excitation
The Gaussian white noise is used as the external excitation applied to the top of the structure by means of an exciter installed on the nearby bracket. However, the applied Gaussian white noise is not used by EKPF-LS for stiffness estimation due to a limitation of inputs. Similarly, the acceleration responses are only measured by sensors arranged in the first, second, fourth story of the frame structure with a consideration of limited outputs. Figure 5 only gives a visualization of the measured acceleration responses of the first, second and fourth story, with the sampling frequency and the sampling duration are 1000 Hz and 60 s, respectively. In order to verify whether the method is capable of getting rid of the restriction of Gaussian white noise model or not, a colored noise similar to that in Section 4 is added to the acceleration responses of each story.
The measured acceleration response signals: (a) the 1st story, (b) the 2nd story, and (c) the 4th story.
Before the EKPF-LS is performed, the stiffnesses and damping of each story are separately defined as 1×105 N/m and 10 N·s/m. The initial parameters, consisting of measurement noise variance, error covariance of stiffness and error covariance of damping, are preset to be 0.1, 1×1012 and 10, respectively. With the particle numbers equals 100 (N = 100), the proposed EKPF-LS method are performed to identify the stiffness of the shear frame structure and the results are plotted in Figure 6. As can be seen from Figure 6, the stiffness identified by EKPF-LS agrees very well with the theoretical counterparts. Nerveless, the stiffnesses identified by EKF-LS and EKPF-LS do not match well with the theoretical counterpart at the initial of the curve. The reason for this phenomenon is that the initial values of stiffness and unmeasured excitation are predefined to be a relatively lower value and zero, respectively, which do not coincide with the exact initial values. The stiffness identification results using EKPF-LS and EKF-LS are also summarized in Table 3 for comparison. It is shown in Table 3 that both the EKPF-LS and EKF-LS can identify the stiffness accurately. Compared with that of EKF-LS (5.24%), the maximum error of stiffness identification using EKPF-LS is 1.57%, which demonstrates that the identification accuracy of EKPF-LS algorithm is better than EKF-LS.
Comparisons of stiffness: (a) the 1st story, (b) the 2nd story, (c) the 3rd story, and (d) the 4th story.
The identified stiffness of four-story shear-type steel shear frame structure.

5.3 The sine sweep signal excitation
The sine sweep signal is used as the external excitation applied to the top of the structure by means of an exciter installed on the nearby bracket. In order to verify the validity of the method under limited inputs and outputs, the sine sweep excitation signal is not measured and the acceleration responses are only measured by sensors arranged in the first, second, fourth story of the frame structure. Figure 7 only gives a visualization of the measured acceleration responses of the first, second and fourth story, with the sampling frequency and the sampling duration are 1000 Hz and 60 s, respectively. In order to verify the effectiveness of the proposed method on other models except Gaussian white noise model, a colored noise similar to that in Section 4 is added to the acceleration responses of each story.
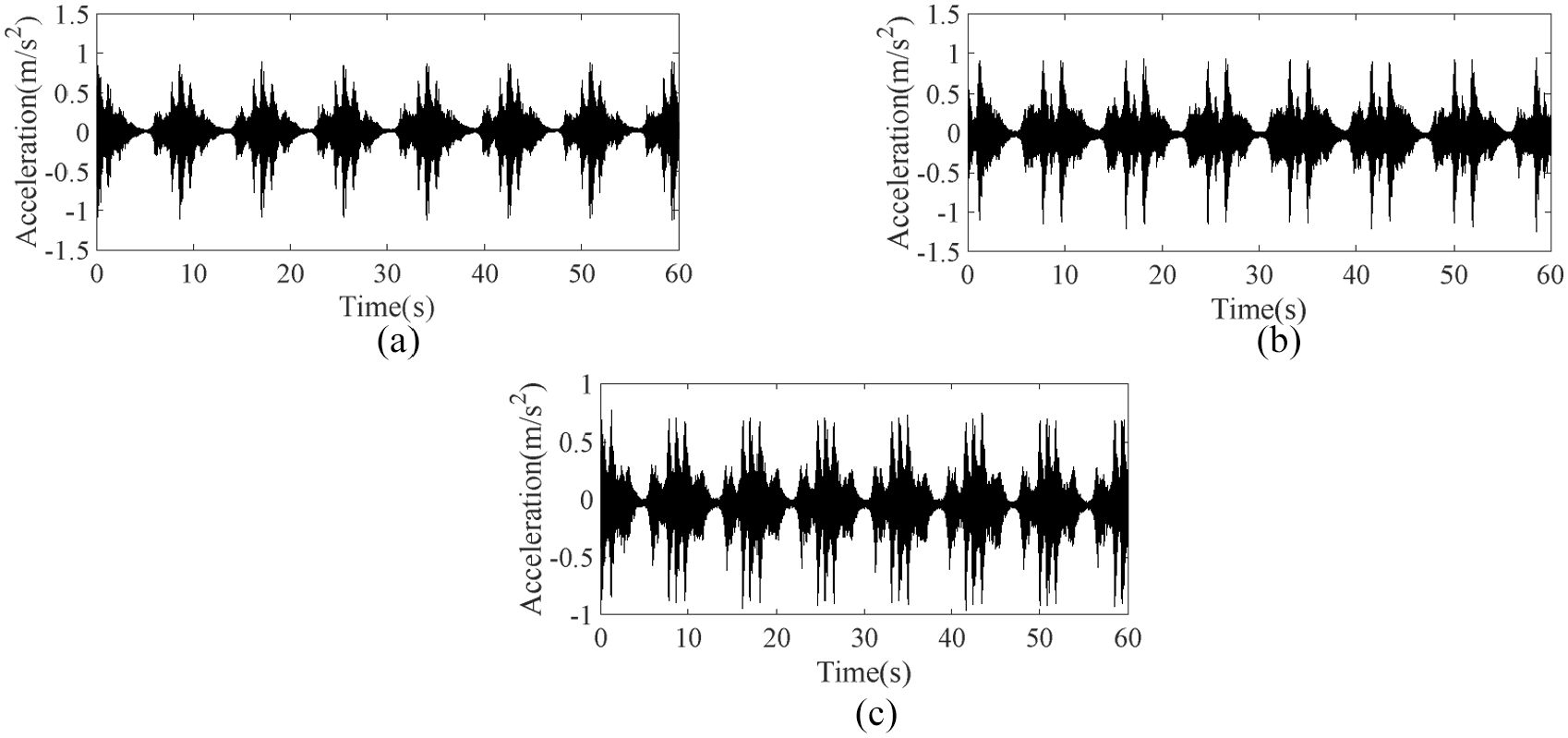
The measured acceleration response signal: (a) the 1st story, (b) the 2nd story, and (c) the 4th story.
The stiffness and damping of each story are preset to be 1×105 N/m and 10 N·s/m, respectively. Other initial parameters, consisting of measurement noise variance, error covariance of stiffness and error covariance of damping, are predefined as 0.1, 1×1012 and 10, respectively. With the particle numbers equals 100 (N = 100), the proposed EKPF-LS method is performed to identify the stiffness of the shear frame structure and the results are plotted in Figure 8. As shown in Figure 8 the stiffness identified by EKPF-LS are in good accordance with the theoretical stiffness. Moreover, the proposed EKPF-LS method behaves better than EKF-LS on stiffness identification because of two reasons, that is, the EKPF algorithm is more suitable for Gaussian colored noise model and it is capable of reducing the linearization error caused by EKF. However, both the stiffnesses identified by EKF-LS and EKPF-LS do not agree with the theoretical counterpart at the beginning of the curve. The reason for this phenomenon is that the initial values of stiffness and unmeasured excitation are predefined to be a relatively lower value and zero, respectively, which do not coincide with the exact initial values. The estimated results of story stiffness are also summarized in Table 4. As shown in Table 4, the maximum errors of stiffness identification using EKPF-LS and EKF-LS are 6.82% and 2.88%, respectively, which demonstrates the high accuracy of the proposed physical parameter identification method on Colored noise model.
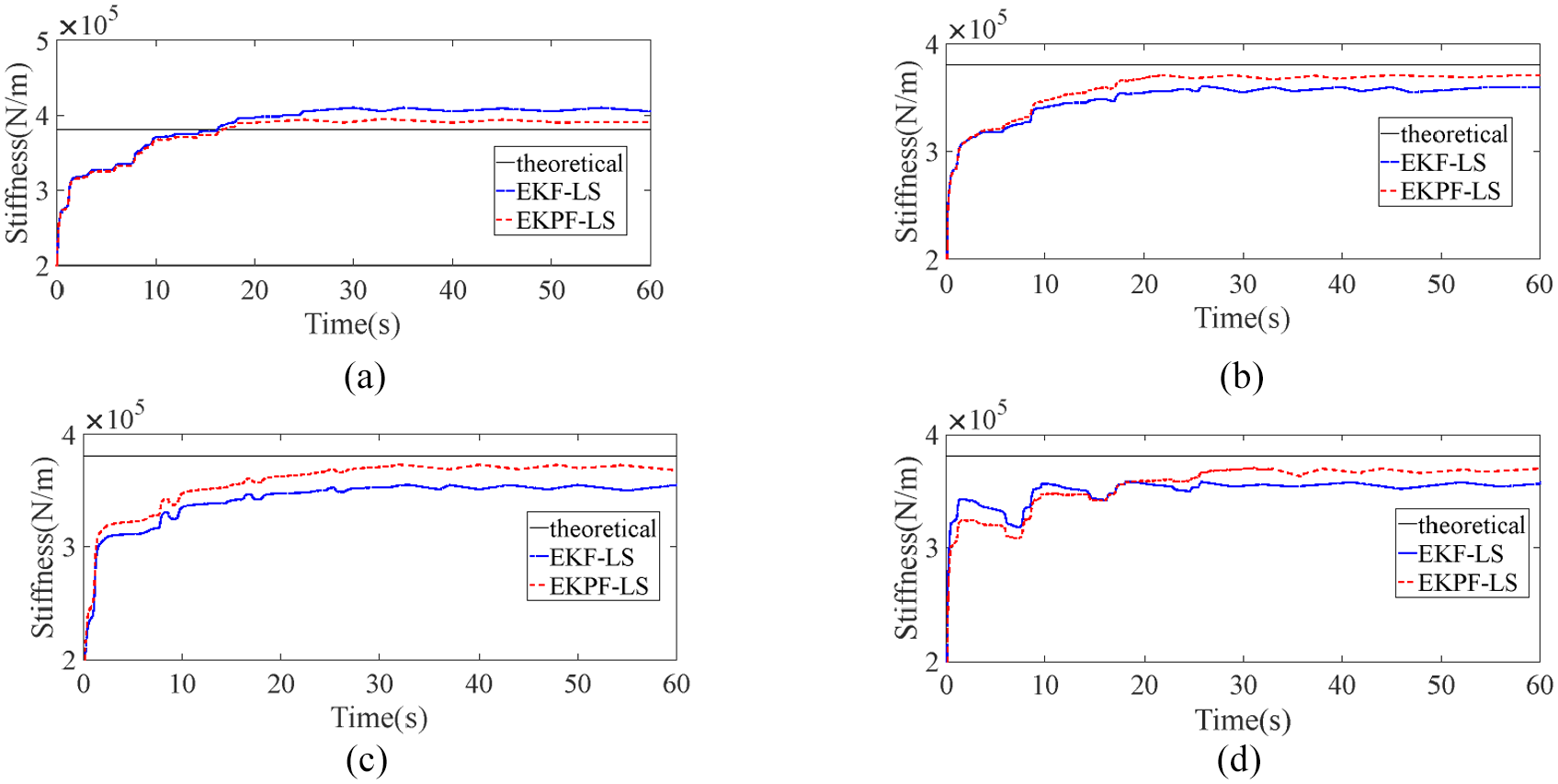
Comparisons of stiffnesses: (a) the 1st story, (b) the 2nd story, (c) the 3rd story, and (d) the 4th story.
The identified stiffness of four-story steel shear frame structure.

Conclusions
In order to enhance the identification accuracy, a new physical parameter identification method named EKPF-LS is proposed for shear frame structures under limited inputs and outputs. The basic principle of EKPF-LS is to establish the proposed distribution function of the particle filter through EKF-LS. In this method, EKPF is introduced to get rid of the restriction of Gaussian white noise model and reduce the linearization error caused by EKF. Meanwhile, LS is utilized to address the problem of unmeasured excitation estimations. To verify the accuracy and effectiveness of the proposed methodology, two examples are investigated: (1) a numerical example of a four-story hysteretic shear frame structure model; (2) an experimental test of a four-story shear type frame using Gaussian white noise and sine sweep signal as excitations, respectively. The results demonstrate that the proposed algorithm can identify stiffness more accurately than the existing EKF-LS method on nonlinear structural model and Colored noise model, while both EKF and EKPF are possible to provide good stiffness identification results for Gaussian white noise model. Compared with EKF-LS, the computing efficiency of the proposed EKPF-LS method is lower because EKF-LS does not need to select the appropriate number of particles. In addition, the proposed EKPF-LS method only needs limited input and output data, and hence it has the potential to accurately estimate physical parameters of practical structures, which will benefit damage detection and structural health condition assessment. Future work will be dedicated to the extensive applications of the proposed method on large size structures, e.g. high-rise buildings.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors acknowledge the supports from the National Natural Science Foundation of China (NSFC) (Grants No. 51608122 and 51778204), Shenzhen Science and Technology program (KQTD20180412181337494), the Outstanding Youth Fund of Fujian Agriculture and Forestry University (Grants No. XJQ201728), China Postdoctoral Science Foundation under Grants No. 2018M632561 and the Open Project Fund of Sustainable and Innovative Bridge Engineering Research Center of Fujian Province University, Grant No. SIBERC 2018001. The results and opinions expressed in this paper are those of the authors only.