
Abstract
Hysteresis is a common phenomenon arising in many engineering applications. It describes a memory-based relation between the restoring force and the displacement. Identification of the hysteretic parameters is central to practical application of the hysteretic models. To proceed so, a noteworthy thing is that the hysteretic models are often complex and non-differentiable so that getting the gradients is never straightforward and therefore, the swarm-based algorithm is often preferable to inverse hysteretic parameter identification. Along these lines, an improved artificial bee colony algorithm is developed in this paper for general hysteretic parameter identification. On the one hand, several hysteretic models along with the extensions to tackle the degradation and pinching behaviours are considered and how to model a structure with hysteretic components is also elaborated. As a result, the governing equation for the direct problem is established. On the other hand, the differential evolution mechanism is introduced to improve the original artificial bee colony algorithm. Numerical examples are conducted to testify the feasibility and accuracy of the proposed method in nonlinear hysteretic parameter identification.
Keywords
Introduction
Hysteresis is a ubiquitous phenomenon arising in many physical and engineering problems. For instance, the stress-strain constitutive relation for elastic-plastic materials is a hysteretic model (Chaboche, 2008), while the dampers designed for seismic isolation should pose the hysteretic behaviour (Fragiacomo et al., 2010; Macki et al., 1993). In principle, hysteresis describes a nonlinear memory-based relationship between the restoring force and the displacement and is able to dissipate the energy during the vibration. Over the years, various hysteretic models have been proposed. To cite a few, the hysteretic model proposed by Bouc (1967) and Wen (1967), known as the Bouc-Wen model, is the most popular model; later, this model is generalized to further deal with the degradation (Baber and Wen, 1981) and pinching (Baber and Noori, 1985)behaviours in hysteresis; in addition, the bilinear hysteretic model which is the ever simplest model has also been found in modelling friction problems (Berger and Krousgrill, 2002) and seismic isolation systems (Fragiacomo et al., 2010).Recently, a hysteretic identification for the detection of damage occurred during a seismic event is studied (Miraglia et al., 2020). Clearly, identification of the hysteretic parameters is crucial for design (Xie et al., 2020), analysis and practical application of the hysteretic models and this is just the focus of the present paper.
Hysteretic parameter identification is a non-trivial task and two main classes of methods – state estimation methods and inverse optimization methods have been developed to tackle this problem. On the one hand, in state estimation methods, the hysteretic parameters are set as the state variables and then, parameter identification is revisited as astate estimation problem for which the Kalman filter can be used to get the solution. Representative work is given as follows: Lin et al. (1994) and Corigliano et al. (2004) proposed to use the extended Kalman filter for hysteretic parameter identification; Wu and Smyth (2008) developed an unscented Kalman filter to quickly identify the hysteretic parameters. An improved unscented kalman filter is proposed for hysteretic identification (Ding et al., 2015). Recently, an inverse problem strategy proposed by permitting the definition of either stress-strain or load-displacement relationships by closed-form expressions (Sessa et al., 2020). The state estimation methods seem simple, however, in order to gain satisfactory performance, the sampling time step should be as small as possible so that the discrete state equation is a good approximation of the original differential equation and the initial choice of the parameters should be reasonably close to the exact values.
On the other hand, for inverse optimization methods, hysteretic parameter identification is typically an inverse problem and it is usually formulated as an optimization problem whose objective function is the least-squares of the misfit between the calculated and the measured data. Many algorithms including the gradient-based algorithms and the swarm-based algorithms have been available for such an optimization problem. The gradient-based algorithms including the least-squares estimation (Smyth et al., 1999; Yang and Lin, 2004), the wavelet multi-resolution analysis (Chang and Shi, 2010) and the Levenberg-Marquardt algorithm (Moré, 1978) require computation of the gradients. Just recently, Lu et al. (2017) proposed a general methodology for hysteretic parameter identification within the sensitivity/gradient-based framework. In their work, only the first-order sensitivity analysis is involved and by introducing the trust-region constraint, the iterative solution is shown weakly convergent. The gradient-based algorithms are beneficial for the quick convergence in getting the solution. However, two main difficulties would emerge herein for hysteretic parameter identification:
The hysteretic models are often non-differentiable and this means that the computation of the gradients or sensitivities is never simple and straightforward.
The least-squares objective function for hysteretic parameter identification is generally non-convex and can have more than one minimum’s. As is noteworthy, the gradient-based algorithms would converge to an undesired local minimum if the initial parameters are outside the basin of the desired global minima. Consequently, the gradient-based algorithms are often quite sensitive to the initial choice of the parameters.
Aiming to overcome these difficulties, the swarm-based algorithms including the Lévy tree-seed algorithm (Ding et al., 2019), the genetic algorithm and the artificial bee colony algorithm (Ding et al., 2016a, 2017a; Karaboga, 2005; Karaboga and Akay, 2009), Cukoo search algorithm (Xu et al., 2016), firefly algorithm (Zhou et al., 2019), beetle swarm optimization algorithm (Jiang et al., 2021) and so on are reasonably adopted because these algorithms are free from a careful choice of the initial parameters, do not require the gradient information and are able to find the global minima. Due to these benefits, the swarm-based algorithms have been widely applied to a number of nonlinear system parameter identification problems. For instance, Ding et al. (2016b) showed that the artificial bee colony algorithm (I-ABC1) can identify the crack locations and extents using only frequency data; later, they (Ding et al., 2017b) modified the artificial bee colony algorithm (I-ABC2) to successfully tackle the structural damage identification with the modal data. Aliprantis et al. (2006) used the genetic algorithm to identify the hysteretic brushless exciter model. Zhang and Xia (2017) developed an improved particle swarm optimization (PSO) algorithm for parameter identification of two practical hysteretic models – the Leishman-Beddoes dynamic stall model of rotor blade and anelastic displacement fields model of elastomeric damper. Shao et al. (2017) proposed an extended continuous estimation of distribution algorithm for solving the permutation flow-shop scheduling problem by focusing on the local exploitation. Wang et al. (2011) discovered a damage identification approach by spectral element model updating using clonal selection algorithm. The above references on swarm-based nonlinear system parameter identification are representative and by no means complete.
Among the swarm-based algorithms, the artificial bee colony algorithm stands out for its concise algorithmic structure, the local and global search ability due to the use of employed and scout bee phases in each step and most importantly, the certified superior performance in a large set of numerical tests (Karaboga and Akay, 2009). Thus, in this paper, the artificial bee colony algorithm is followed up. Moreover, to accelerate the convergence procedure and enhance the global search ability, the differential evolution mechanism is introduced to improve the artificial bee colony algorithm. Actually, the differential evolution alone has been a popular optimization algorithm for model parameter identification due to the great ability in the global search: Toman et al. (2008) identified Jiles-Atherton (J-A) hysteresis model by using differential evolution; Ho et al. (2010) proposed an improved differential evolution to identify the parameter of chaotic systems.
The remainder of this paper is organized as follows. In Section 2, some usual hysteretic models including the bilinear model, the Bouc-Wen model and the extensions to tackle the degradation and pinching behaviours are introduced and how to establish the governing equation for the hysteretic structure is also elaborated. In Section 3, the artificial bee colony algorithm is called and improved for solution of the inverse hysteretic parameter identification problem. Numerical examples are conducted in Section 4 and final conclusions are drawn in Section 5.
Forward and inverse problem statement
Nonlinear hysteretic models
Hysteresis represents the memory-based relation between the displacement and the restoring force and it is generally described by the following hysteretic function,

where u is the displacement, r is the restoring force,
Bilinear model with kinematic hardening. This hysteretic model (see Figure 1) is the ever simplest model and the hysteretic function is given as


where

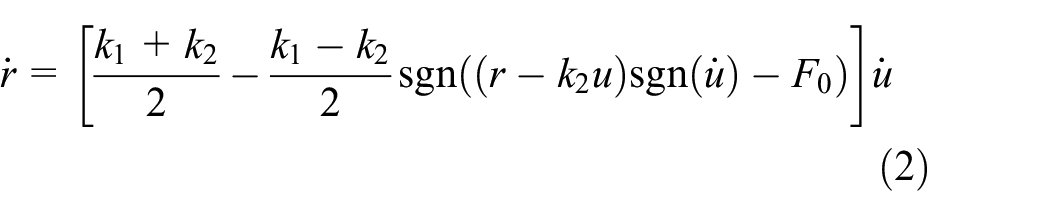
Bilinear model with equal yielding force. Schematic view of this model can be found in Figure 2. Such a model has the following hysteretic function



where
Bouc-Wen model. The Bouc-Wen model is a widely used hysteretic model and the respective hysteresis loop is schematically presented in Figure 3. The Bouc-Wen hysteretic function is of the following form



where
Hysteresis with degradation. Degradation is a complex hysteretic behaviour and the hysteresis loop with degradation is schematically plotted in Figure 4. The hysteretic function for degradation that was primary proposed by Baber and Wen (1981) is given in the following

This hysteretic function is similar to that of the Bouc-Wen model in equation (9), except that the time dependent coefficients


where



where

Hysteresis with pinching. The pinching behaviour is described as: the stiffness of the system is small if the restoring force is small, while becomes large if the restoring force exceeds a certain value. For graphical view of the hysteresis loop, refer to Figure 5. A usual hysteretic function for the pinching behaviour (Baber and Noori, 1985) is given as



The parameter s is set as a function to describe the dissipated hysteretic energy,

where

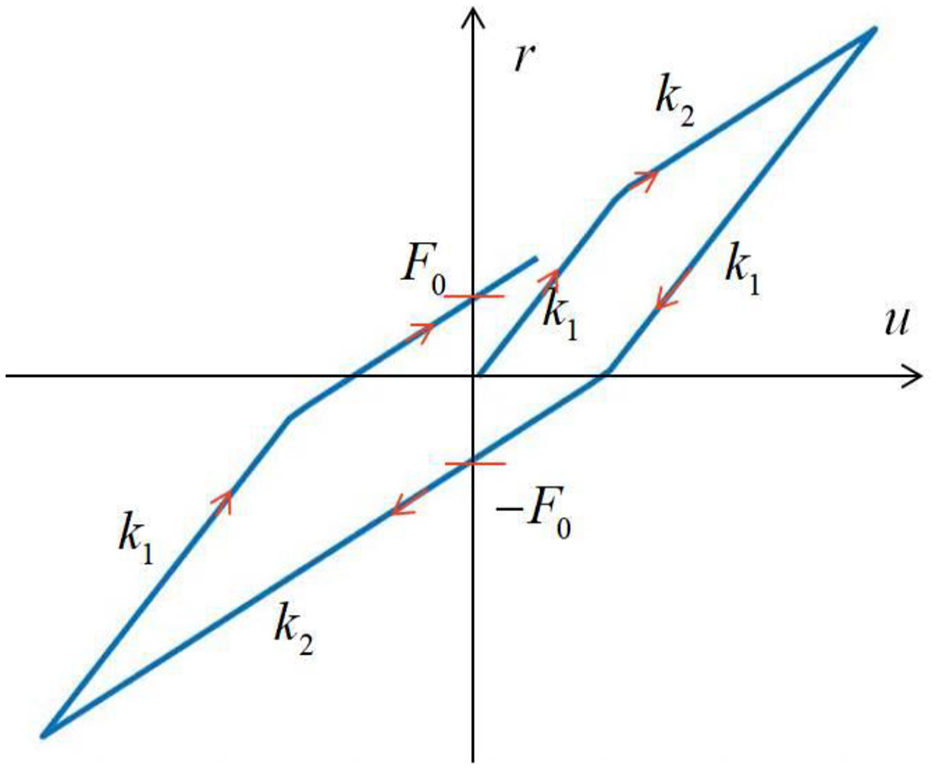
Bilinear model with kinematic hardening.
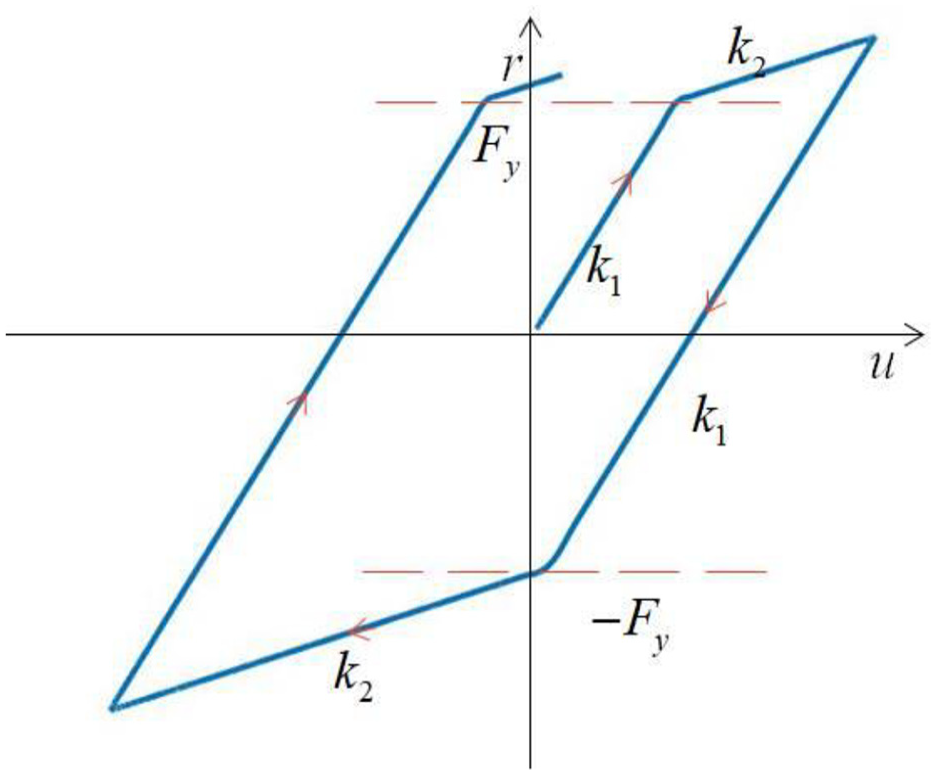
Bilinear model with equal yielding force.

Bouc-Wen model.

Hysteretic model with degradation.

Hysteretic model with pinching.
Modelling structures with hysteresis
As for a structure with hysteresis, let

The connection matrix
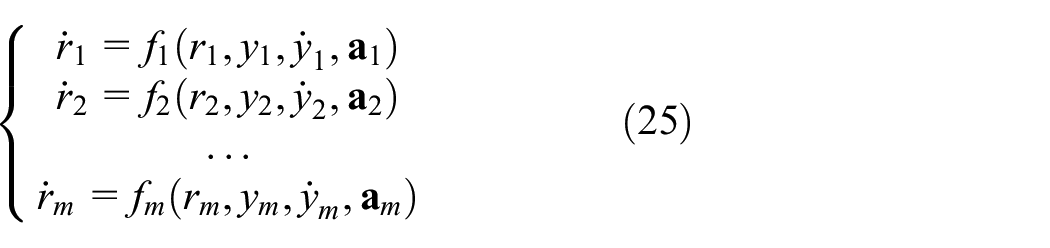
where
To conclude, the dynamic equation of the structure with hysteresis can be described as follows (Lu et al., 2017),

where
Inverse problem
To identify the parameters of the hysteretic structure, the measured response data of structure should be obtained at first. The measured response data

where ||.|| represents the usual L2-norm of a vector. In the next section, the improved artificial bee colony algorithm (I-ABC) is developed to solve this nonlinear least-squares optimization problem (27).
Improved artificial bee colony algorithm for hysteretic parameter identification
Revisit of artificial bee colony algorithm
The artificial bee colony algorithm is a well-known heuristic algorithm based on the bee foraging behaviour, which was first studied by Karaboga (2005). In this algorithm, a food source represents a feasible solution. The fitness of the solution describes the quality of the food source.
There are three types of bees in the foraging behaviour: the employed bee, the onlooker bee and the scout bee. The number of all bees in the group is set as the group size. The numbers of the employed bee and of the onlooker bee are the same and equal to half of the group size.
The employed bee will exploit the food source to find a better solution using a local search step. After backing to the nest, the employed bee will share the information about the food source with the onlooker bees and recruit it.
The onlooker bee will select one according to the quality of the food source, meaning that the better solution will be selected by more onlooker bees. Once an onlooker bee chooses one employed bee, it will optimize the employed bee’s current solution by a local search step. After the onlooker bee finding a better solution, the employed bee will choose the new one and abandon its current solution. If the current solution can’t be updated for limited times, the employed bee will abandon it and find a new solution randomly in the search region.
In the algorithm, the food source quality represents the value of the objective function. The better quality of the food source can attract more employed bees, indicating that the algorithm can find the best solution of the objective function.
Initial phase
In the first stage of the algorithm, each employed bee was arranged with a random solution according to the group size,

where j and i represent the dimension of the parameters and the number of group size, respectively,
Employed bee phase
In this stage, the employed bee attempts to update its current solution by a local search mechanism,

where

where
Onlooker bee phase
After the employed bee updating its solution, the onlooker bee will choose one solution according to the roulette wheel selection,
where

where
Scout bee phase
To avoid being trapped in the local optimization, the scout bee mechanism was used to improve the global search ability of the algorithm. If one solution was kept over certain time, it will be abandoned by the employed bee. The employed bee will randomly choose a solution in the search region by equation (28). The certain time was defined as

where l represents the limited time, GS is the group size and D is the dimension of the parameters.
Improved artificial bee colony algorithm
The employed bee phase of the algorithm ensures its effectiveness and the optimized speed for each individual bee can exploit its search region by the local search stage. However, the original artificial bee colony algorithm is easy to trap in local optimization when the inverse problem became more and more complicated. It is highly effective to improve the algorithm by combining with other searching strategy (Ding et al., 2016b, 2017a).
In this study, a new differential evolution mechanism is utilized to improve the global search ability of the original artificial bee colony algorithm.
The local search mechanism in the employed bee phase is replaced by a new mechanism. Four employed bees are selected randomly as the first generation and one is selected randomly as the next generation. The employed bee is updated by
where
In the onlooker bee phase of the original artificial bee colony, a roulette wheel mechanism is utilized by the onlooker bee to select the food source, implying that the solution with higher fitness value will be selected more easily. In this way, the best solution can be selected faster in the local search. However, for the existing of the biggest individual, the algorithm is easier trapped in local optimization. Therefore, the tournament mechanism is introduced to replace the roulette wheel mechanism. In the tournament mechanism, each individual will compete with others at first. The winner gets one score, and the loser gets 0. Then, sum it up as
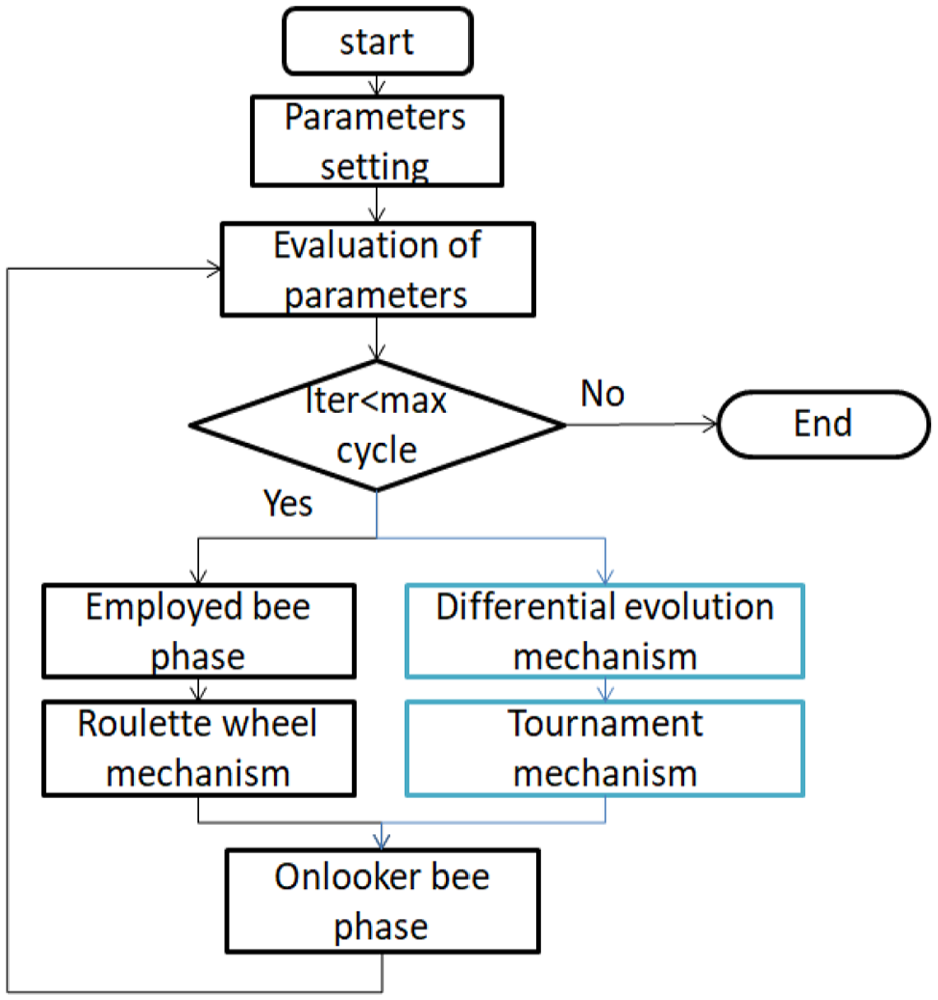
Flowchart of the algorithm.
The two strategies are introduced to accelerate the convergence procedure and promote the local search ability by (Ding et al., 2017b).
Numerical tests
Several single-degree-of-freedom (SDOF) hysteretic systems and a multiple-degree-of-freedom (MDOF) hysteretic system are studied to testify the proposed parameter identification method in this part. The improved artificial bee colony algorithm (I-ABC) is used to identify the hysteretic parameters. The parameters of the algorithm are set as

where
SDOF system with hysteresis
For the SDOF system, the external load is set to
Bouc-Wen model
Firstly, an SDOF hysteretic system with the Bouc-Wen model (9) is considered. The hysteretic parameters are
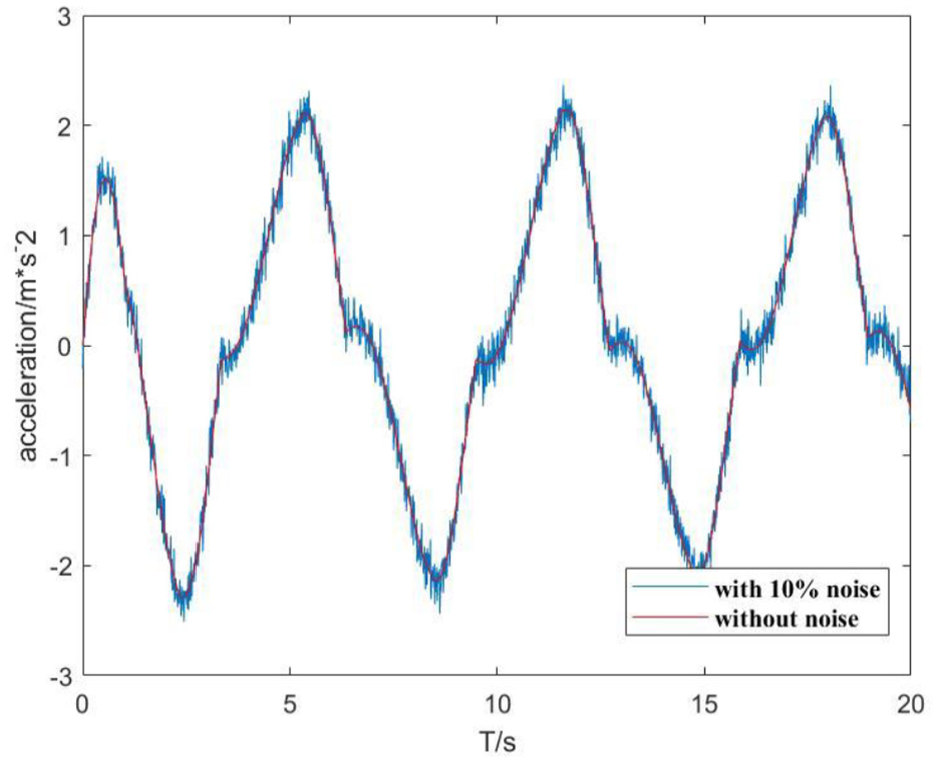
The hysteretic loop and the response in this SDOF system under different noise levels are shown in Figures 7 and 8.

Hysteretic loop of SDOF system with Bouc-Wen model.

Acceleration of SDOF system with Bouc-Wen model.
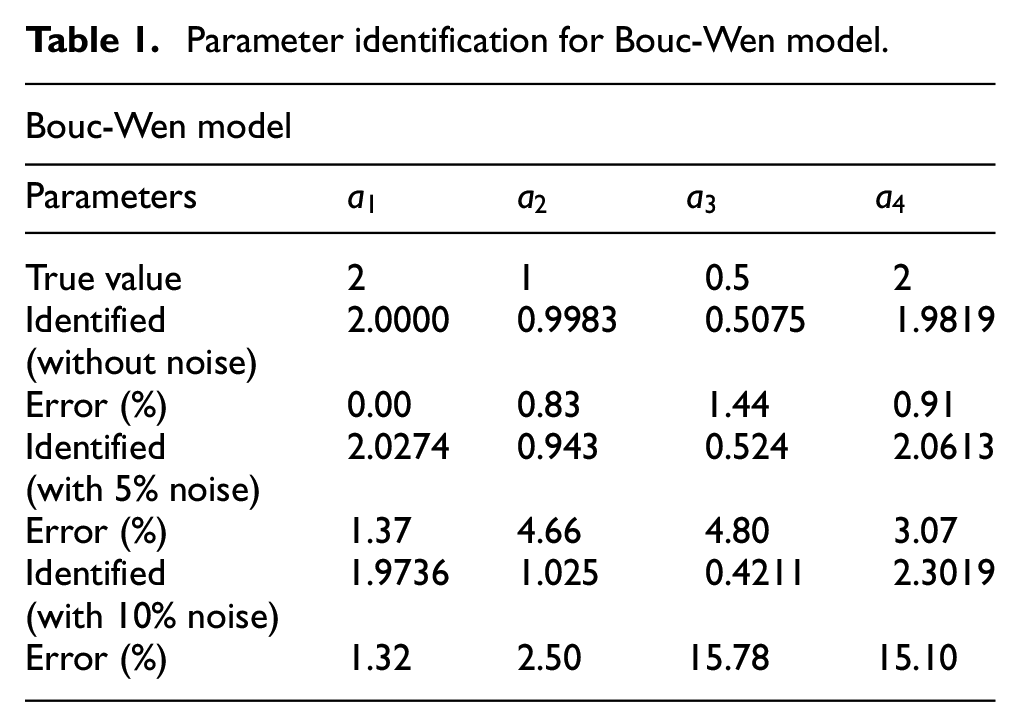
The identification results are listed in Table 1. The hysteretic parameters under the three noise levels can be well identified. The maximum relative error of the identification without noise is only 1.44%. While the maximum relative errors of the identification are respectively 4.8% and 15.78% under the noise levels 5% and 10%. The proposed method has been shown to successfully identify the hysteretic parameters of the Bouc-Wen model.
Parameter identification for Bouc-Wen model.
Bilinear model with kinematic hardening
Secondly, the bilinear model with kinematic hardening is studied. In this system, the hysteretic parameters are set to

Hysteretic loop of SDOF bilinear system with kinematic hardening.
Acceleration of SDOF bilinear system with kinematic hardening.
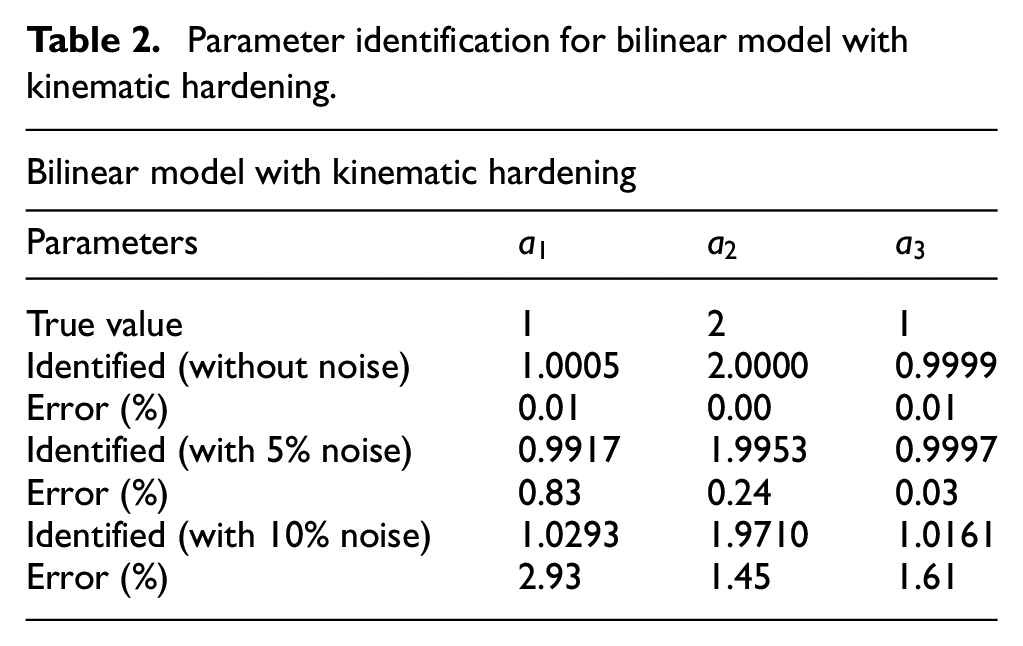
The results of the identification are presented in Table 2. Again, the hysteretic parameters are well identified. The relative error without noise is only 0.01%. Even with 5% and 10% measurement noise, the relative errors are no more than 0.83% and 2.93%, respectively.
Parameter identification for bilinear model with kinematic hardening.
Bilinear model with equal yielding force
For the bilinear model with equal yielding force, the hysteretic parameters are

Hysteretic loop of SDOF bilinear hysteretic system with equal yielding force.

Acceleration of SDOF bilinear hysteretic system with equal yielding force.
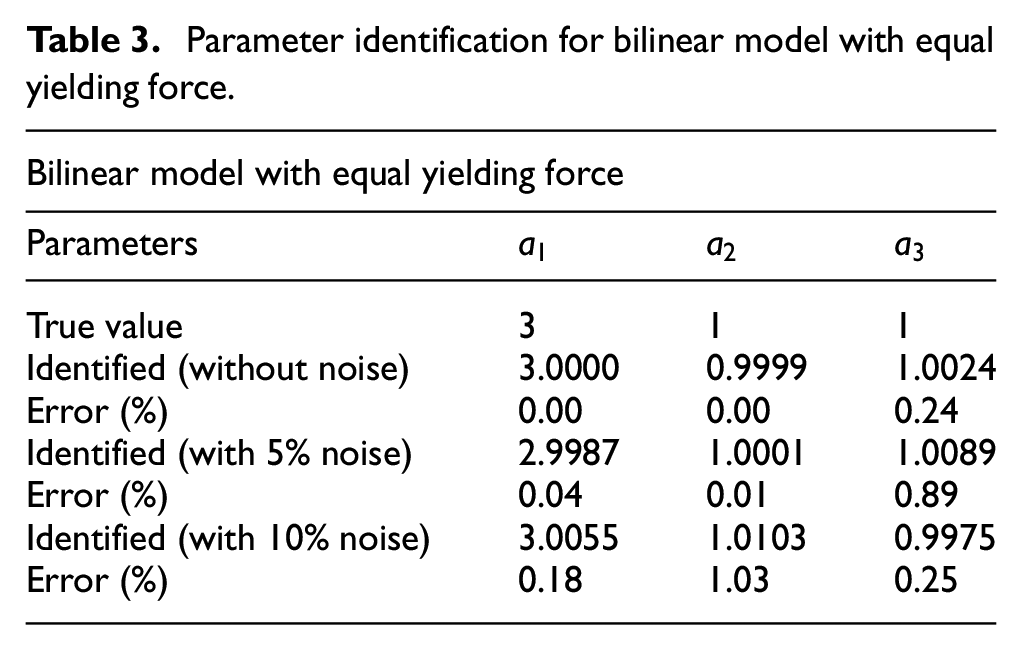
The identification results are exhibited in Table 3. Clearly, the hysteretic parameters are well identified. The maximum relative error without noise is only 0.24%. While with 10% noise, the relative error is no more than 1.03%.
Parameter identification for bilinear model with equal yielding force.
Hysteresis with degradation
In this SDOF system, the hysteretic parameters are
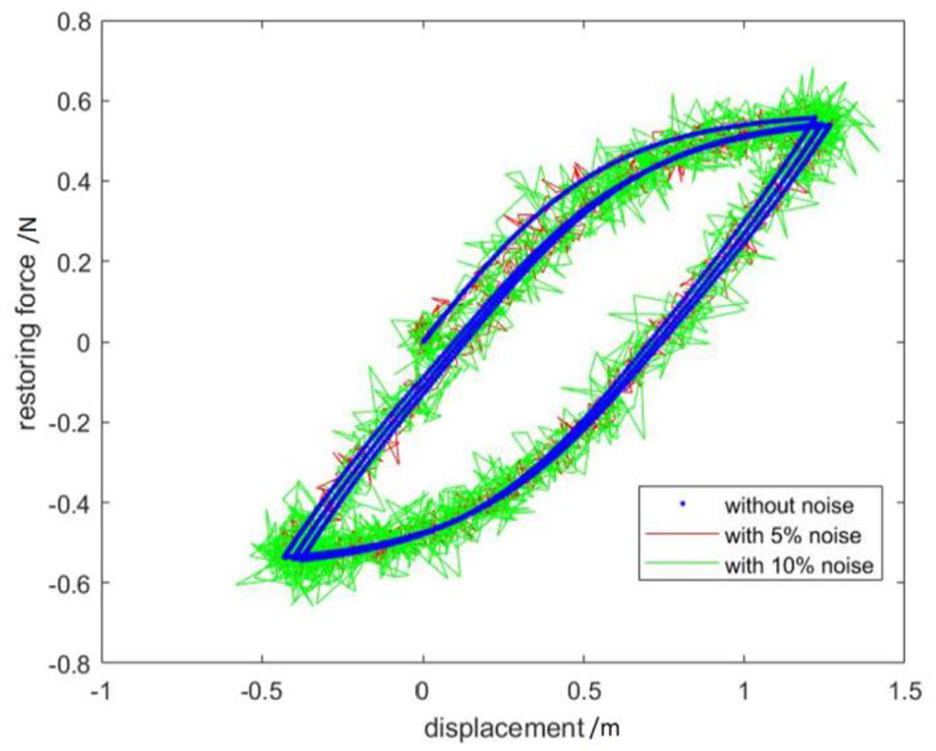
Hysteretic loop of SDOF hysteretic system with degradation.
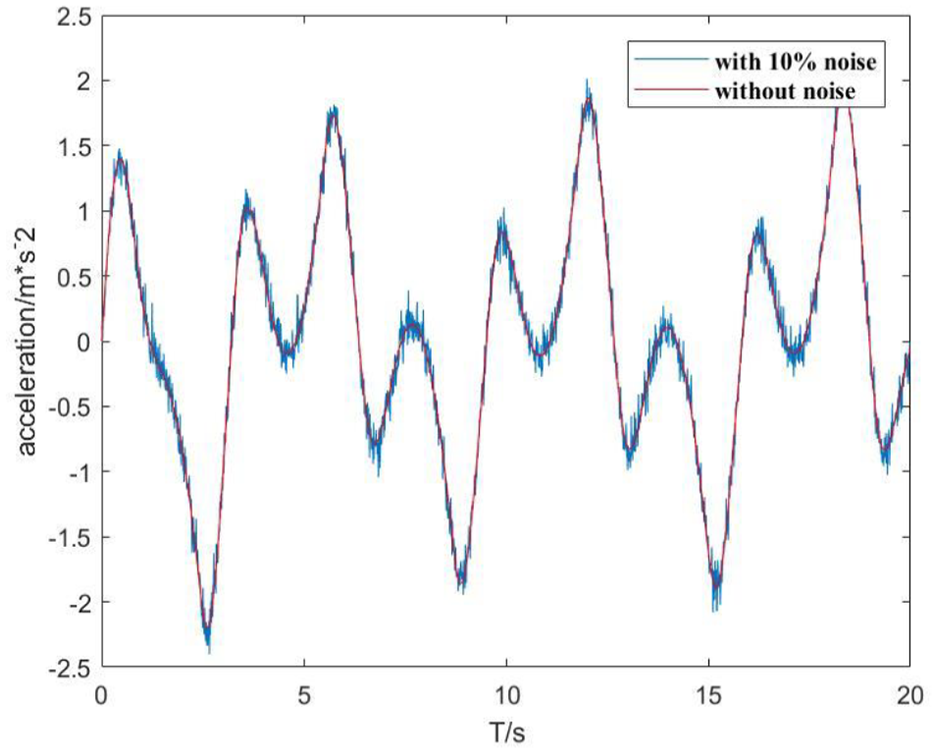
Acceleration of SDOF hysteretic system with degradation.
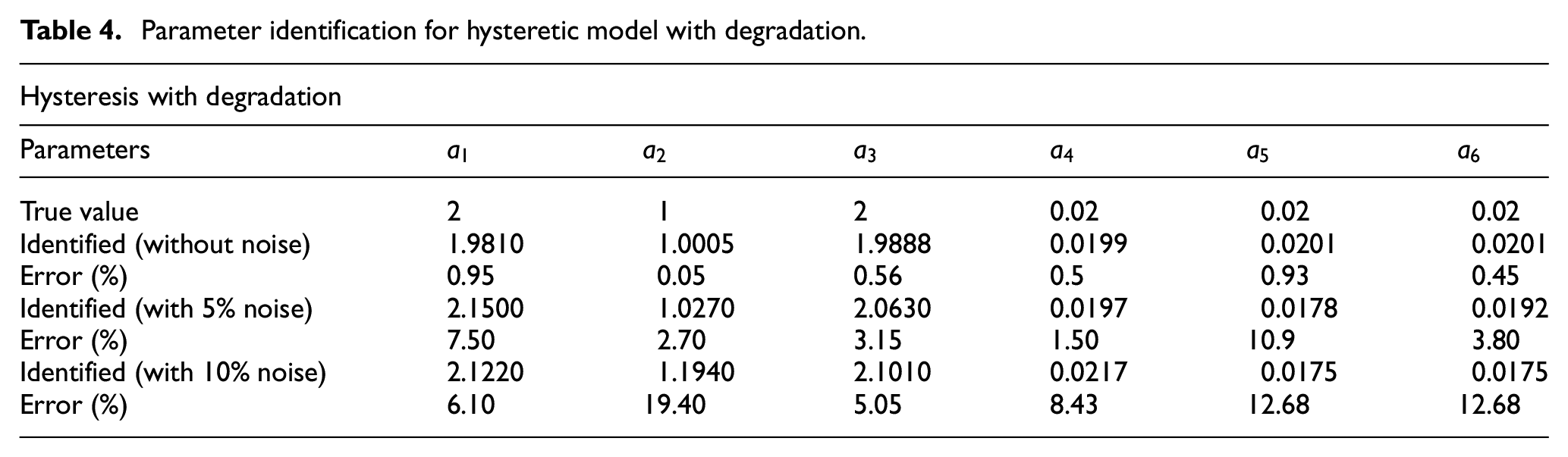
The detailed identification results are listed in Table 4. Obviously, satisfactory identification of the parameters for the hysteretic model with degradation is observed: the relative error without noise is less than 0.95%, while the results under the high noise level 10% are still acceptable because, the maximum error is no more than 19.4%.
Parameter identification for hysteretic model with degradation.
Hysteresis with pinching
The last model in the SDOF system is the hysteretic model with pinching. The hysteretic parameters are
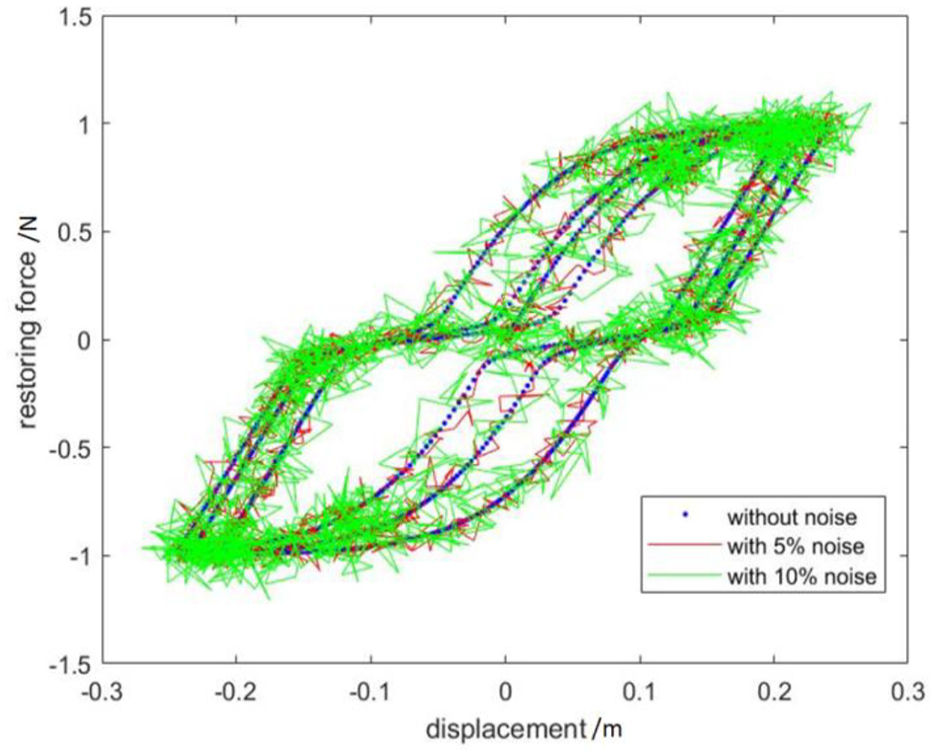
Hysteretic loop of SDOF hysteretic system with pinching.
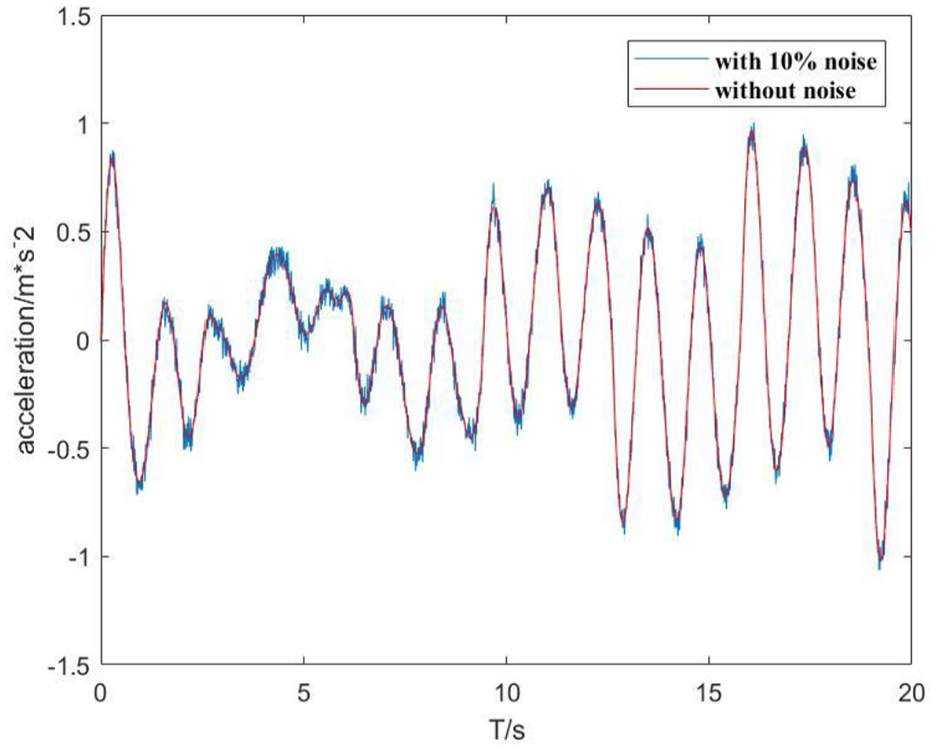
Acceleration of SDOF hysteretic system with pinching.
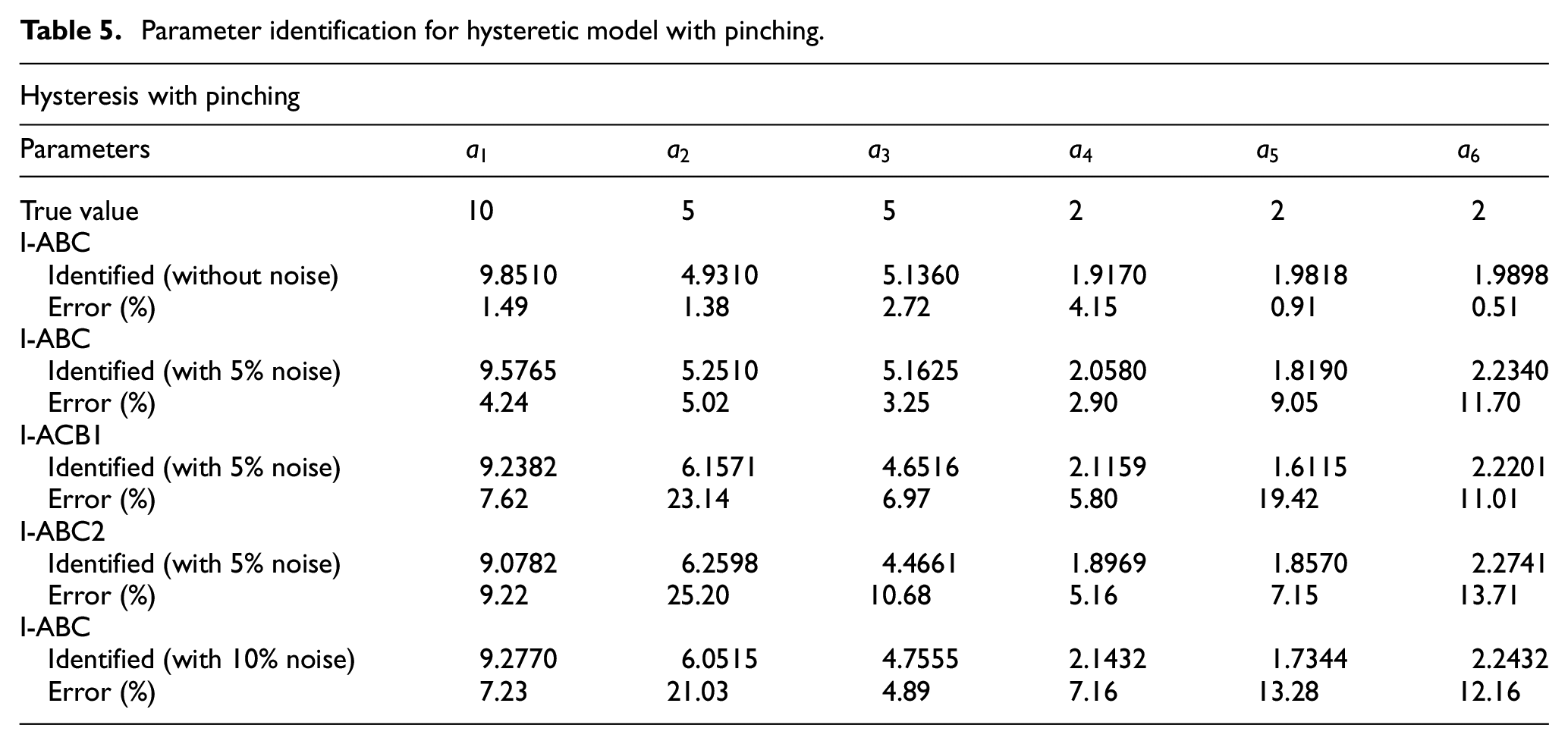
Parameter identification for hysteretic model with pinching.
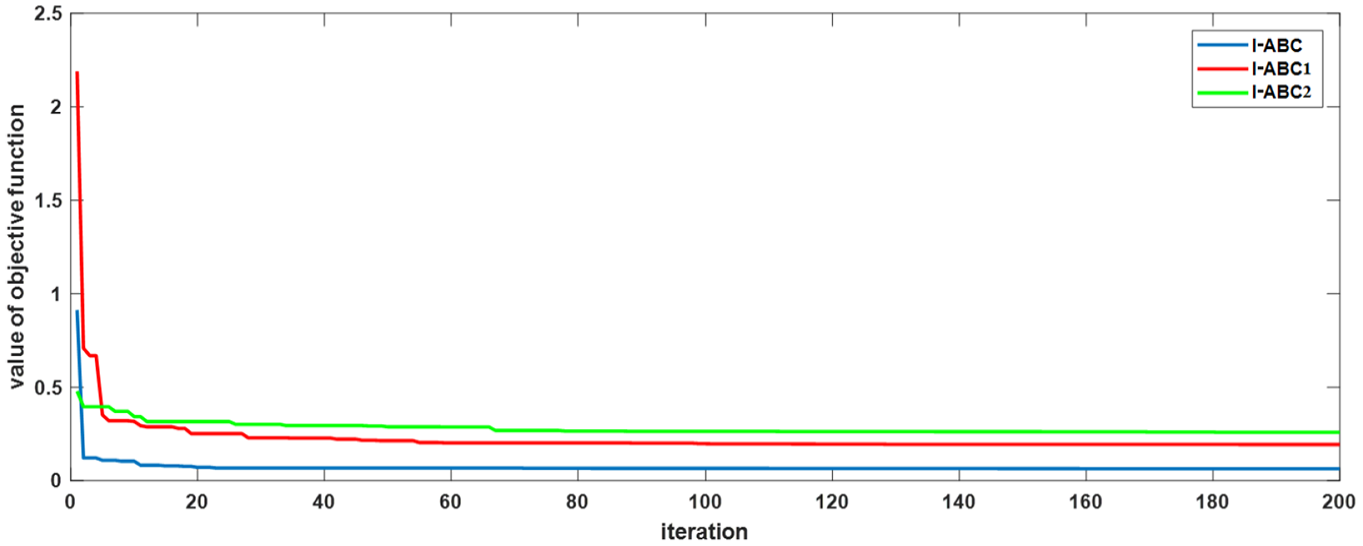
The value of objective function by three improved artificial bee colony algorithms in identification for hysteretic model with pinching.
From the identification results Table 5, though the identification for the pinching model is a little worse than for other hysteretic models due to the complexity of the model, the final results are still acceptable by the proposed approach (I-ABC) because under 5% noise level, the maximum relative error is less than 12%. While the maximum relative errors of I-ABC1 and I-ACB2 are respectively 23.14% and 25.20%. Moreover, least value of objective function is eventually obtained by the proposed I-ABC, as shown in Figure 17. Clearly, compared with I-ABC1 and I-ACB2, better accuracy has been achieved by the proposed approach.
MDOF system with bilinear hysteresis
The second example concerns a three-span and four-storey frame model, for which the geometry and the connection of the hysteretic models are shown in Figure 18. All beams and columns are of the same material and sectional geometry properties: the elastic modulus

Frame structure as a MDOF system.
Usually, hysteretic components can be used into the structural for seismic isolation (Li et al., 2019; Xu et al., 2018). In this example, two bilinear hysteretic components with kinematic hardening as in Section 2.1 are invoked and their connection to the frame structure is schematically shown in Figure 18.
The hysteretic parameters of the two hysteretic models are set to
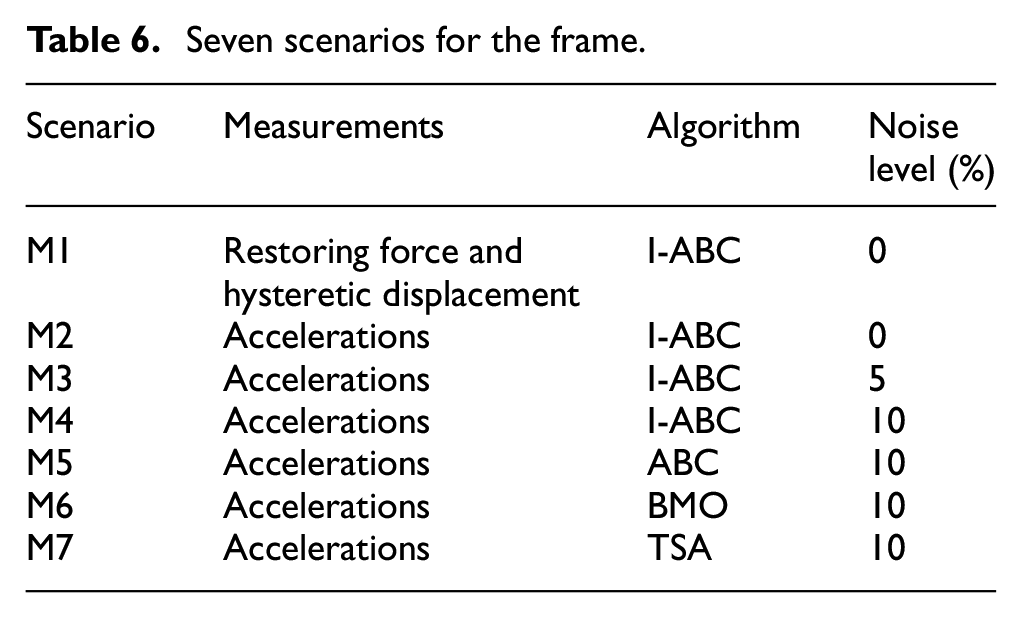
In addition to the proposed I-ABC, the original artificial bee colony algorithm (ABC) (Karaboga and Akay, 2009), the bird mating optimization (BMO) (Askarzadeh, 2014) and the tree seed algorithm (TSA) (Ding et al., 2019) are additionally adopted to identify the parameters for comparative purpose. Seven scenarios as presented in Table 6 are considered for this frame. The acceleration data are measured in the horizontal direction of nodes 5, 7, 13 and 19 and for exemplification, the acceleration at the fifth node with two noise levels are exhibited in Figure 19.
Seven scenarios for the frame.
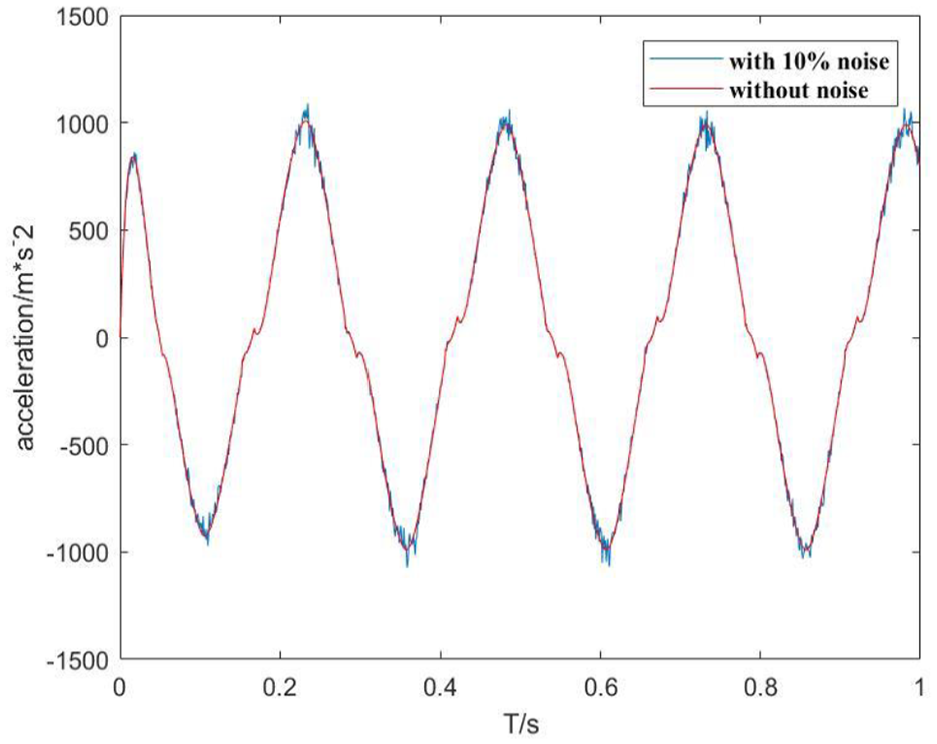
Horizontal acceleration of the fifth node on the frame.
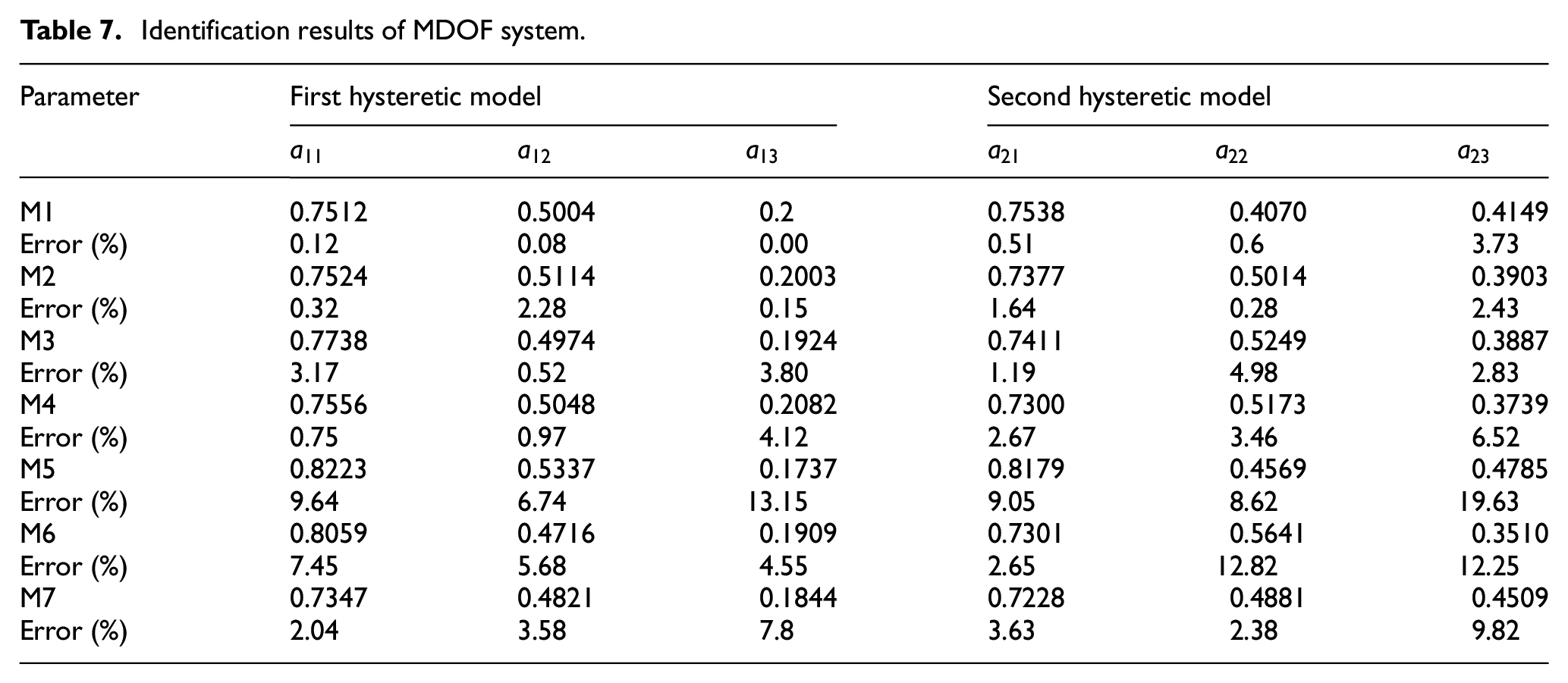
The specific identification results are listed in Table 7. It is seen that the hysteretic parameters are all well identified for the seven scenarios: for the proposed I-ABC, the relative errors are no more than 3.73% in case of no noise (scenarios M1 and M2) and are less than 4.98% at 5% noise level (scenario M3),even at 10% noise level(scenario M4), the relative errors do not exceed 6.52%, while the maximum relative errors of the ABC, the BMO and the TSA are respectively 19.63% (scenario M5), 12.82% (scenario M6) and 9.82% (scenario M7). Clearly, more accurate identification of the hysteretic parameters is reached than those by the ABC, the BMO and the TSA.
Identification results of MDOF system.
Furthermore, to see the convergence, evolution of the objective function with iterations is plotted in Figure 20 for the four methods (scenarios M4–M7). It is seen that the proposed I-ABC can converge after 2000 iterations, while for the ABC, the BMO and the TSA, there should exceed 2500 iterations in order for convergence. Moreover, at the convergence stage, the objective function by the I-ABC is smaller than those by the ABC, the BMO and the TSA. Indeed, the proposed I-ABC is found to give convergent and robust identification for hysteretic parameters, and perform superior to the ABC, the BMO and the TSA.
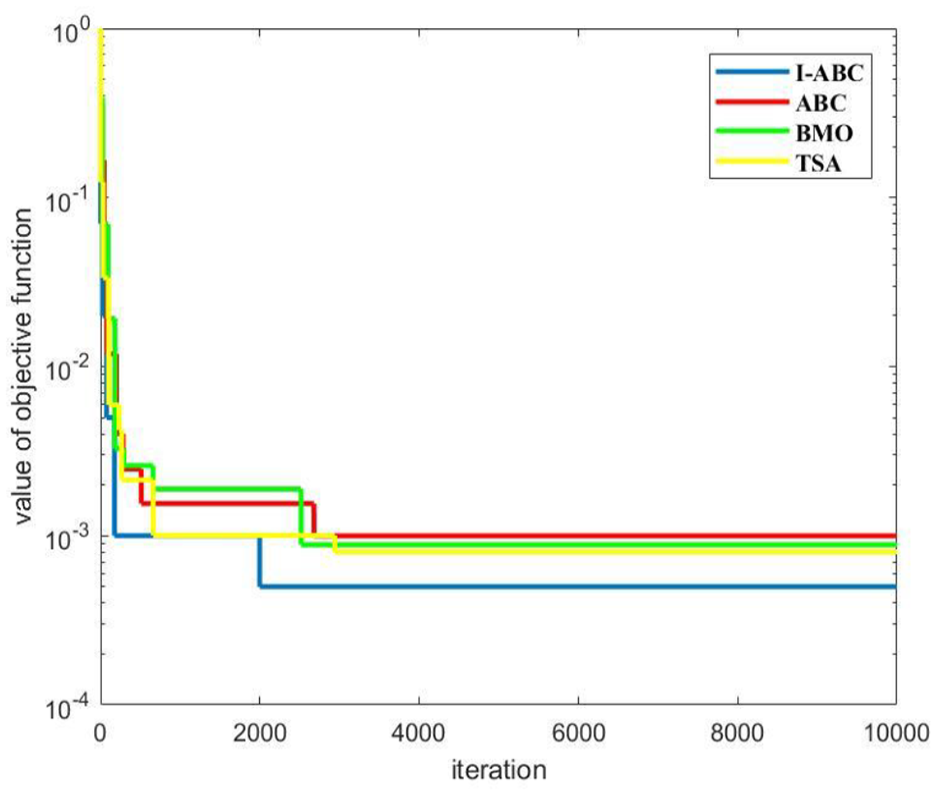
Evolution of objective function with iteration for scenarios M4–M7.
Conclusion
A comprehensive framework for various hysteretic parameter identification by the improved artificial bee colony algorithm (I-ABC) has been established in this paper. In doing so, the hysteretic parameter identification is treated as an optimization problem and then, the improved artificial bee colony algorithm by the differential evolution mechanism is called to get the solution. The attractive feature of the proposed method is that it is free from the initial guess of the parameters and is quite straight forward to deal with the non-differentiability of the hysteretic models. Five different SDOF hysteretic systems including the Bouc-Wen model, the bilinear model with kinematic hardening, the bilinear model with equal yielding force, the hysteretic model with degradation and the hysteretic model with pinching and a frame structure with hysteretic components are studied. Results show that: (a) the proposed method is able to deal with parameter identification of various hysteretic models and the generality of the method for hysteretic parameter identification is verified; (b) the present method is robust because it works well even under 10% measurement noise; (c) the proposed method performs superior to the conventional ABC, BMO and TSA in terms of the convergence speed and the accuracy for hysteretic parameter identification; (d) as with the MDOF example, the proposed method is believed to be a feasible tool for hysteretic parameter identification in practical seismic isolation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The present investigation was performed under the support of National Natural Science Foundation of China (No. 11702336 and No. 11972380), Guangdong Province Natural Science Foundation (No. 2018B030311001).