
Abstract
This paper proposes a dissipative resilient observer and controller (DROC) design for a network controlled system (NCS) that handles faults, implementation errors, or cyberattacks that can be modeled as bounded controller or observer gain perturbations. It presents linear matrix inequality (LMI) conditions for the robust stability of the system in the presence of bounded perturbations in the observer and controller. Furthermore, a new LMI-based time-delay control (TDC) algorithm that mitigates the effects of perturbations due to time-delays in the NCS is introduced. The robust methodology is applied to active control of a scaled model of a structural system equipped with an active mass driver system. The results demonstrate that the proposed methodology is robust and ensures stable system response due to various types of earthquake base excitations.
Keywords
Introduction
An actively controlled structural system, such as building and bridge, can be viewed as a complex networked control system (NCS) that includes a communication network through which sensor and control signals are transmitted via wireless and/or wired means within a close the control loop. The communication system in NCS is prone to random time-delays, packet drops, and furthermore NCS may be susceptible to cyberattacks. Hence, NCS must be carefully designed to mitigate the effects of time-delay and packet drops, and to ensure resilient system against various forms of disturbances. Additional sources of time-delay can be identified in a control system due to computational time and hardware (sensor data acquisition, actuator, etc.). While the total end-to-end time-delay within the control loop is typically in the order of the system-sampling rate, larger random time-delays may occur. However, delays, even orders of magnitude smaller than the sampling rate may cause instability.
The terms “fragile” and “non-resilient” are used interchangeably for a controller. Such controllers are subject to significant degradation in the system response due to implementation errors, failure, or cyberattacks. A resilient control system is “one that maintains state awareness and an accepted level of operational normalcy in response to disturbances, including threats of an unexpected and malicious nature” [Reiger et al., 2009]. Robust resilient observer and/or controller design for discrete-time systems and cyber-physical systems (CPS) compensate for bounded errors in the observer gain that may result in an unacceptable system response [Duan and Yu, 2013; Fadali and Yaz, 2018, Feng et al., 2015; Keel and Bhattacharyya, 1997; Yaz et al.,2005]. Yaz et al. [2005] introduced a resilient non-fragile observer design for discrete-time systems. They used linear matrix inequalities (LMI) to design observers with guaranteed stability and performance indices. Feng et al. [2015] designed resilient full-order controllers and observers that are robust with respect to perturbations in both controller and observer gains. They selected the locations of the closed-loop eigenvalues subject to
Fadali and Yaz [2018] presented an observer design that is robust with respect to implementation errors and cyber attacks in the form of perturbations in the observer gain. They derived LMIs that guarantee QSR dissipativity and observer stability in terms of the nominal observer gain. Yan et al. [2017] proposed a hybrid framework to detect a data injection attack and to ensure plant operation. Their method utilizes a mechanism of observer-based detection and a passivity balance defense framework. The administrator prevents attacks by separating user data from bad data, thus ensuring plant operation even after the attack has been detected. The defense mechanism is obtained by a passivation transformation M-matrix design. The design guarantees passivity for the hybrid automaton under attack and the system operates with desired performance even if the system is under attack. The passivity-based design does not require the intense computation required for Kalman filter, LQG controller, or linear-optimization-based game theory methods. Torfi [2018] proposed a resilient controller design for linear time invariant (LTI) systems subject to probabilistic attacks on the sensors and the actuators. The probabilistic attack and the time interval over which each sensor/actuator subject to attack are modeled using Bernoulli random variables.
If the controller and observer are part of a NCS, the network dynamics influences the behavior of the control system. The network introduces a delay between the controlled system and the observer, as well as a delay between the controller and the actuator. Limited network capacity can cause the time-delays to vary randomly and can result in dropping packets of measurement data delivered to the observer or control input data delivered to the actuator via the communication network. The packet delay or loss can lead to signification degradation of the time response, or to instability. Hence, it is important to consider the effect of delays while designing a resilient observer and controller for NCS.
Mathiyalagan et al. [2015] modeled network delays in NCSs as a set of switches between the observer and the controller. A resilient observer for a NCS utilizing the switched system was designed and the system behavior with delay, without delay, and with packet drops was examined. They proposed an exponential dissipative discrete-time switched control with time-varying delays by using the average dwell time approach and a Lyapunov–Krasovskii function. Moreover, using LMIs, the authors designed an observer-based state feedback controller that guarantees the exponential stability of the NCS and strict QSR dissipativity for all network delays and packet losses. Zhang et al. [2008] proposed an observer design for linear system with delayed measurements. They used a functional-based transformation to transform the system with delayed measurements into a system without delay and designed a full-order observer and a reduced-order observer for the non-delayed system. Naghshtabrizi and Hespanha [2005] provided a design procedure of a linear observer-based output-feedback controller for a remote linear plant. The controller design uses the Lyapunov–Krasovskii theorem and a linear cone complementarity algorithm. The controller stabilizes the plant in the presence of delay, sampling, and dropout effects in the measurement and actuation channels.
Time-delay compensation has been investigated in various structural control implementations (e.g. Liu et al. [2016], Lezgy-Nazargah et al. [2020]). Jang et al. [2013] proposed a time-delay control (TDC) algorithm for vibration mitigation in a building structure that estimates system dynamics and disturbances by utilizing immediate past response history. The design is robust to unknown dynamics and disturbances. Agrawal and Yang [2000] evaluated five different commonly used delay compensation methods in civil engineering control applications. Their results showed that the phase shift method is not reliable when the time-delay is large or when the level of active damping is high. Furthermore, the recursive response method and the state-augmented compensated method give more reliable results in terms of stability and control performance. The Schmitt trigger method guaranteed stability in the presence of short time-delays without performance distortion. In general, Pade approximation methods guarantee stability for large or small delays with small performance distortion. Chen and Cai [2009] proposed an optimal discrete TDC algorithm based on an augmented system derived by transforming the equations of motion of the TDC system into a difference equation. The control forces were linearly related to the time-delay states and the state feedback gain was designed by minimizing a specified performance index. This approach ensured stability and mitigated the effects of time-delay.
Time-delays, implementation errors, faults, or cyberattacks can be modeled as a state-dependent or output-dependent term that is equivalent to a gain perturbation for the controller or the observer [Feng et al., 2015; Fattahi and Afshar, 2018]. The present study proposes a dissipative resilient observer and controller (DROC) design that is resilient in the face of bounded perturbations in controller or observer gain due to implementation errors, faults, or cyberattacks. Linear matrix inequality (LMI) conditions for the robust stability of the system with bounded perturbations in the observer and controller gains are provided. Moreover, a delay compensation algorithm is designed to mitigate the adverse effects of time-delays. For the random time-delay compensation algorithm, it is assumed that sensor measurements are time-stamped so that network delay is known as measurements are received. Because the sampling period is short relative to the network dynamics, it is also assumed that the controller-to-actuator delay is approximately equal to the sensor-to-controller delay. An application is demonstrated through simulations on actively controlled model structure presented by Spencer et al. [1998]. Other sources of external disturbances that may occur during the implementation of a plant control in engineering structures are not considered in this paper but can be accounted for in the error dynamics using our methodology, as shown in Fadali and Yaz [2018].
The main significant contributions of this paper are: a) the design of a dissipative resilient NCS controller and observer to handle bounded perturbations, b) the lower computational load of the proposed design in comparison to other methodologies, such as Kalman filters, LQG controllers or linear-optimization, which promotes its practical implementation, and c) an effective random or deterministic time-delay compensation method that applies to both observer and controller, and ensures resilient NCS by means of a computationally inexpensive algorithm, as demonstrated on a benchmark experimental model.
The paper starts with the derivation of general NCS model design with resilient dissipative observer and controller using LMIs. Next, a delay compensation algorithm is proposed to eliminate the adverse effects of time-delay on the system response. The structural control application that utilizes an Active Mass Driver (AMD) system [Spencer et al., 1998] is described and the numerical simulation of the proposed designs is demonstrated. The simulation results and evaluation of both time and frequency domain performance of the designs are discussed and conclusions are presented.
Dissipative resilient observer and controller (DROC) design
Observer design
The state-space model of a linear time invariant continuous-time plant is given as




Since it is practically not possible to measure all of the state variables, an observer is used to provide estimates of the state variables. The nominal observer dynamics is given by

If the system suffers from a fault or cyberattack, an output-dependent perturbation can occur in the term

Subtracting the observer equation from the equation of the plant gives the error dynamics. The augmented dynamics including the observer error dynamics and the dynamics for the system with full state feedback control is Block diagram of the closed-loop NCS.



The performance of the system depends on the error and the dependence is encapsulated in a performance output defined as



A dissipative system is called QSR dissipative if the supply rate function is the quadratic [Hill and Moylan, 1976; Marquez, 2003; Moylan and Hill, 1978]

Letting

Substituting energy and performance outputs in equation (14) gives the asymptotic stability condition for the perturbed observer dynamics


The results of this section are summarized in the following theorem [Fadali and Yaz, 2018].
For the system of (1), the observer of (5) subject to the gain perturbations of (6) is robustly asymptotically stable if there exists a solution
Controller design
Consider the discrete-time system of equations (3) and (4) with the state feedback control

The closed-loop system is given by


Based on the separation principle of (7), the controller can be designed using (19) and the state can replace the state in the calculation of the state feedback.
If the objective is to drive the system to the origin, the error is given by

Due to implementation errors, faults or cyberattacks, a perturbation can occur in the controller. Wang and Soh [2000], Fattahi and Afshar [2018] represented such faults and cyberattacks as additive perturbation classes in the feedback controller gain matrix. For example, Wang and Soh [2000] proposed two classes of gain perturbations in terms of solutions to algebraic Riccati equations for state feedback control designs. Accordingly, one of the class gain perturbations,
Fattahi and Afshar [2018] assumed that attackers may cause gain fluctuations in the network, and modeled the controller gain as the additive form of perturbation. Similarly, this study assumes that, computational errors, actuator faults, or malicious attacks can be modeled as a perturbation

The error dynamic equation (21) changes to

The controller gain error

The closed-loop dynamics become

To design a controller to converge to the desired steady state, the quadratic error energy function

Must satisfy the dissipativity condition [Willems, 1972]


The inequality is equivalent to the LMI

Therefore, substituting


Equation (31) can be manipulated by adding and subtracting terms to include the matrix

This simplifies the sufficient condition (32) to

Applying Lemma-1 (see the Appendix) to equation (33) gives

Then applying Lemma-2 (see the Appendix) results in

A sufficient condition for dissipativity is obtained as

Using Lemma-1 gives the inequality

Combining the two LMIs of equations (36) and (37) gives the sufficient dissipativity condition

After solving the LMI (38) for

Substituting for the control in the observer equation gives the controller–observer dynamics as in (7)

The results of this section are summarized in the following theorem.
For the system of (1), the control of (18) subject to the gain perturbations of (24) is robustly asymptotically stable if there exists a solution
Time-Delay Compensation (TDC) Algorithm for NCS
In the NCS system of Figure 1, it is assumed that the data acquisition system samples sensor measurements of the plant output and sends them through a communication channel in the form of data packets that are input to the observer. The observer computes state estimates and the controller uses them to provide observer state feedback. The control values are sent to the actuator and plant as data packets through the communication network. The data packets sent through the communication network experience random time-delay that must be accounted for if the NCS is to function properly. Although the controller-to-actuator and sensor-to-observer/controller network delay may differ, the two delays are approximately equal if the sampling period is sufficiently small relative to network dynamics [Al-Hammouri et al., 2006]. Therefore, the controller-to-actuator time-delay is assumed to be equal to the sensor-to-observer/controller time-delay.
If the data delivered to the observer is time-stamped [Nilsson, 1998], the delay
Because of the sensor-to-observer time-delay, the observer receives the measurement


The controller and observer designs are based on LMIs as in earlier work presented by Fadali and Yaz [2018]. However, the perturbation model used in the present study and the use of LMI design to mitigate the effects of the perturbation are new contributions. The proposed approach may be of interest in many control applications, such as the control of structural systems. The approach has the following advantages and critical limitations: 1. The design handles any type of delay, random, or deterministic, provided that it is less than a specified maximum allowable delay. Although the algorithm is not guaranteed to succeed if the network delay exceeds the maximum allowable delay, as demonstrated through a numerical case study, the control with time-delay compensation performs satisfactorily even if the time-delay exceeds the maximum allowable delay for short durations. 2. Because observer dynamics are used to predict the states, the computational cost of the proposed delay compensation method is low and is suitable for real-time applications 3. The present approach assumes that delays for sensor-to-controller and controller-to-actuator are the same for the proposed delay compensation design. For systems where network dynamics change faster than the system dynamics, this assumption is not valid.
Numerical case studies: structure with an active mass driver
The implementation and performance of the proposed DROC and time-delay compensation (TDC) algorithm are demonstrated through numerical response simulations of a benchmark control problem [Dyke, 2011] introduced by Spencer et al. [1998]. The benchmark structure was designed as a scaled model of a prototype building [Chung et al., 1989], and subjected to uniaxial base excitations for various control performance evaluations. The 158 cm tall, steel model structure and its 2D idealization are shown in Figure 2. The total mass was 309 kg, which included structural frame (77 kg), added similitude masses (75.6 kg per floor), and 5.2 kg AMD moving mass. The dominant frequencies of vibration for the three structural modes were 5.81, 17.68, and 28.53 Hz. For control purposes, a simple implementation of an Active Mass Driver (AMD) was placed on the third floor of the structure. The AMD consists of a single hydraulic actuator with steel masses attached to the ends of the piston rod (Figure 2). The servo-actuated hydraulic cylinder has a 3.8 cm diameter and a 30.5 cm stroke. The readers are referred to Spencer et al. [1998] for complete details. The benchmark structure with AMD [Spencer et al., 1998].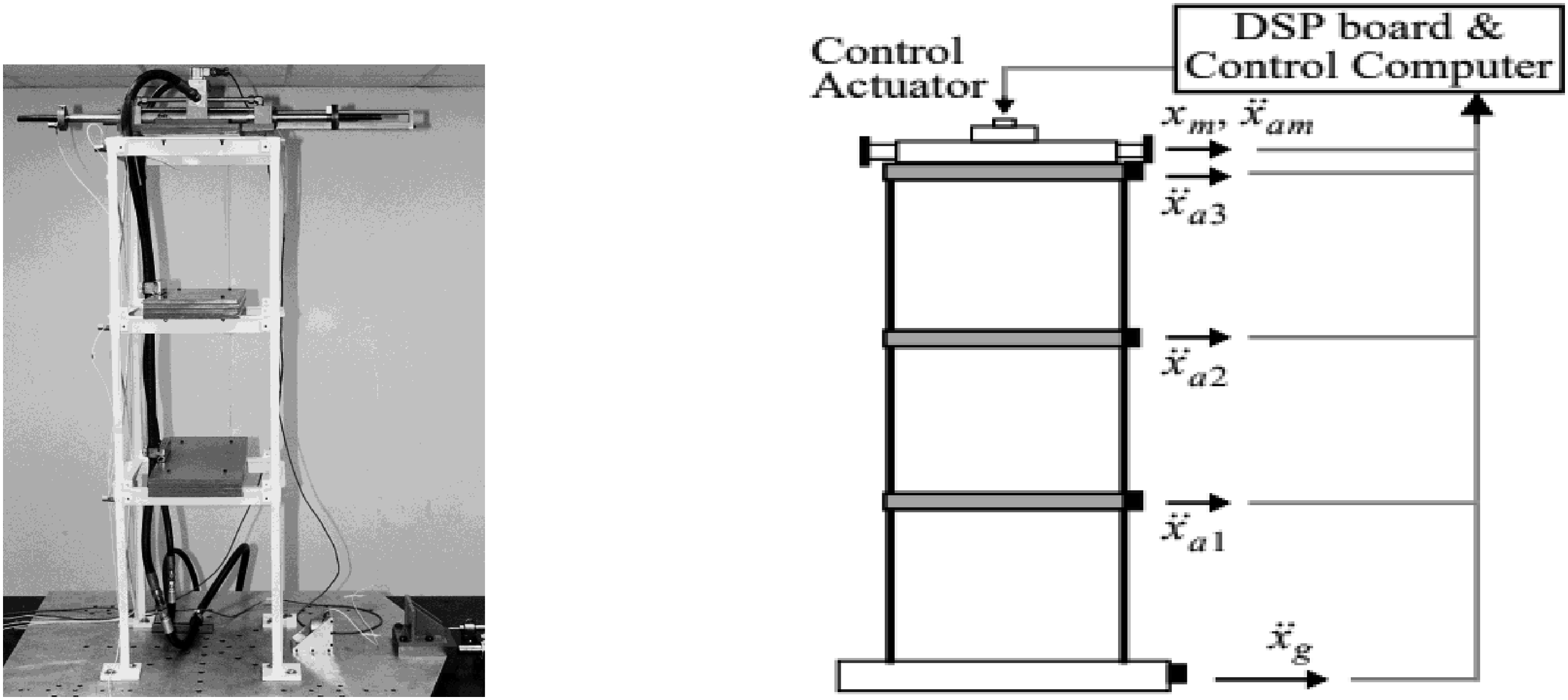
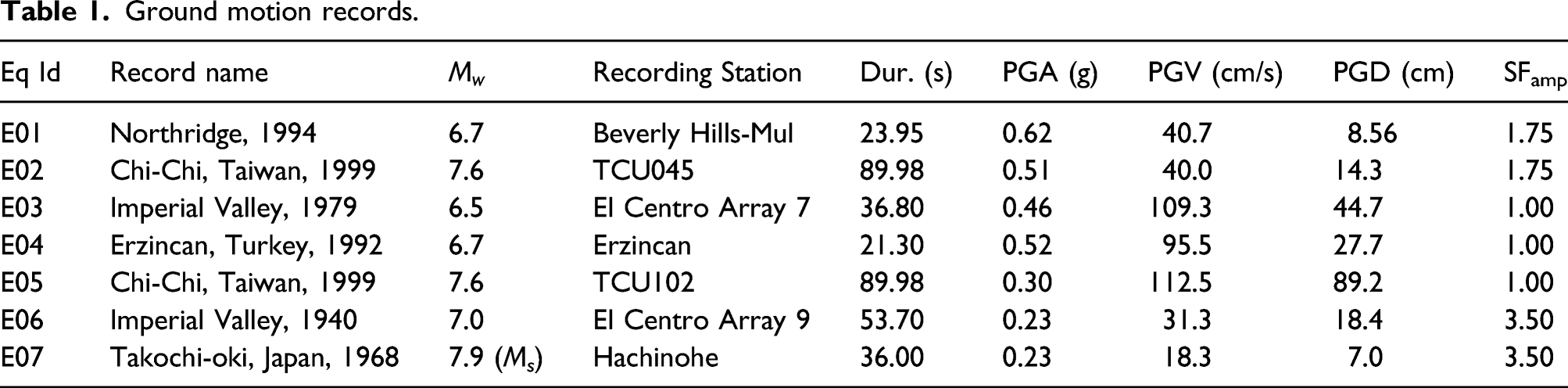
Ground motion records.
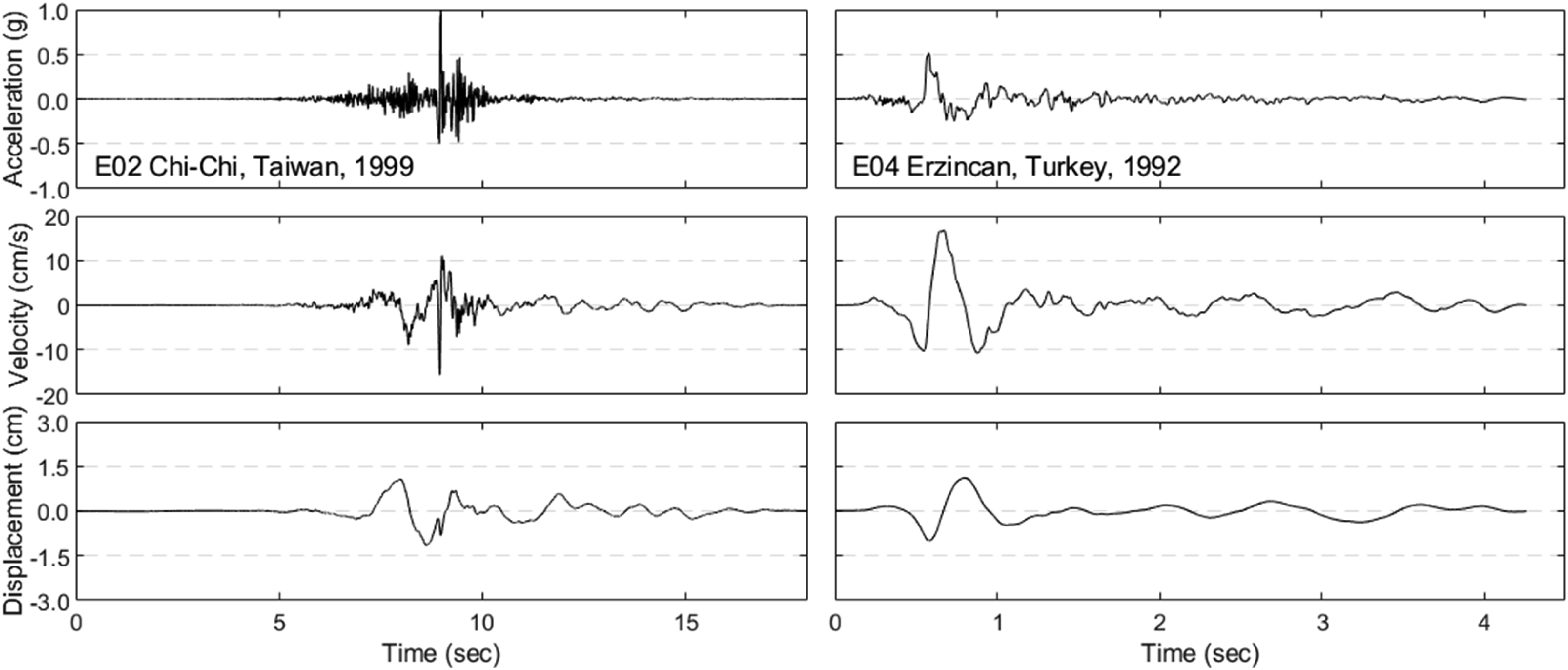
Scaled acceleration, velocity, and displacement records of sample earthquake ground motions.
As noted earlier, the proposed LMI-based time-delay compensation is designed to ensure that NCS system will perform satisfactorily for time-delays less than or equal to the sampling period (i.e., Sample random normalized time-delay history.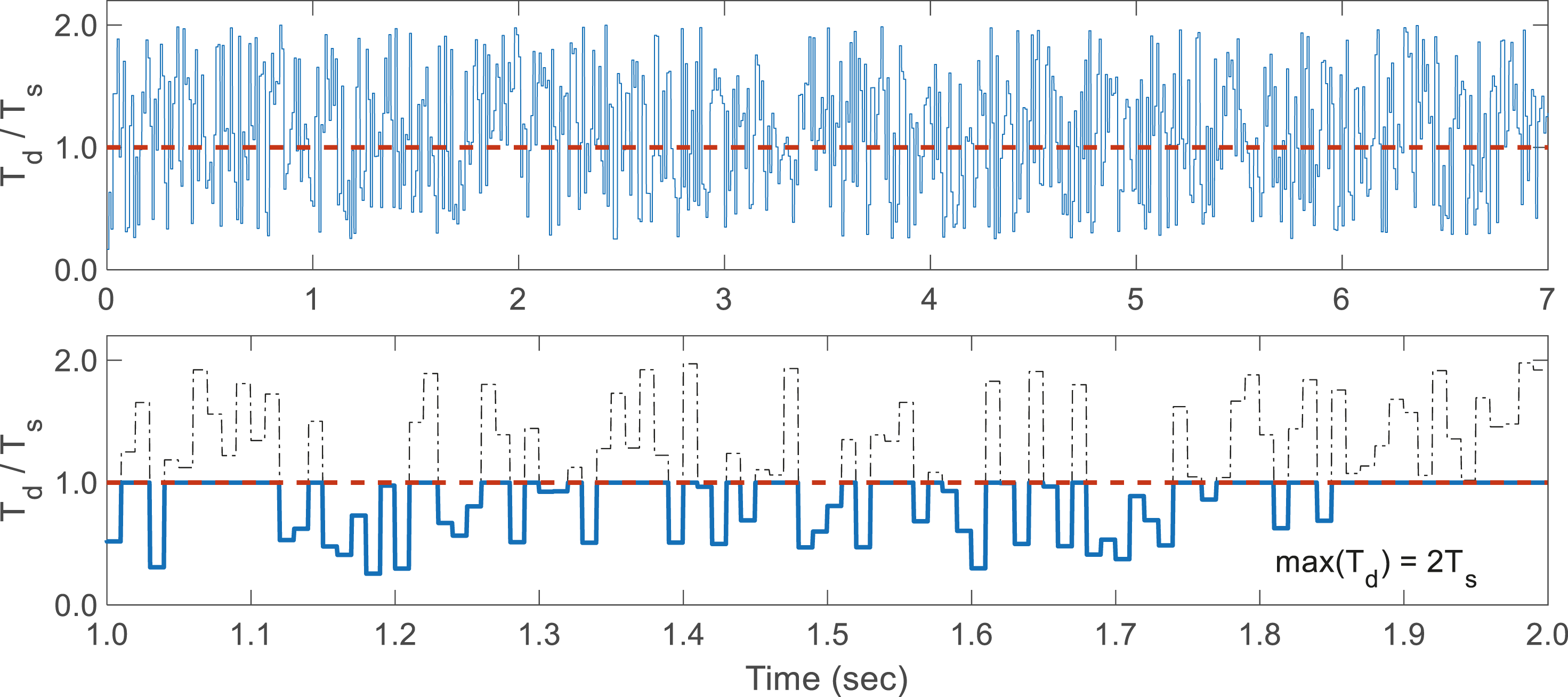
Evaluation Model and Control Designs
Spencer et al. [1998] introduced the evaluation model for the AMD system with a sample control design as follows. Consider the continuous time state-space model of the AMD Linear Time Invariant (LTI) system


To simplify controller design, the following reduced-order model is used

Performance measures.

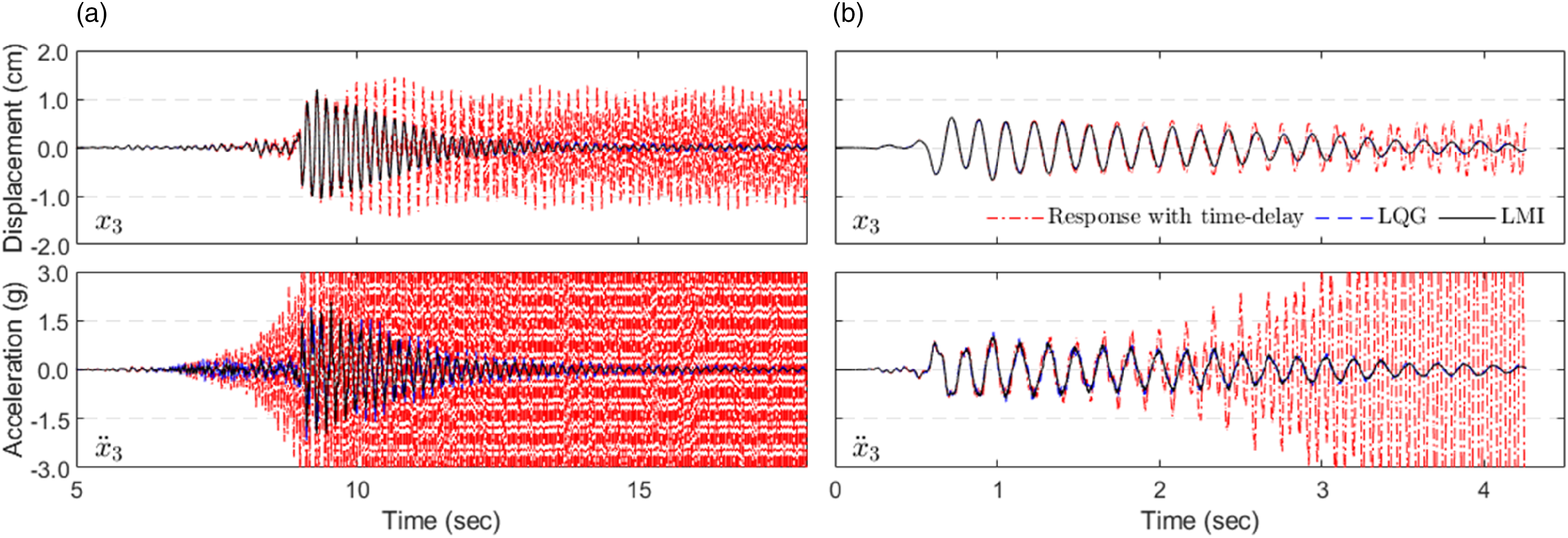
In Equations (48)–(52), Response history comparison of displacements and absolute accelerations due to (a) E02 and (b) E04.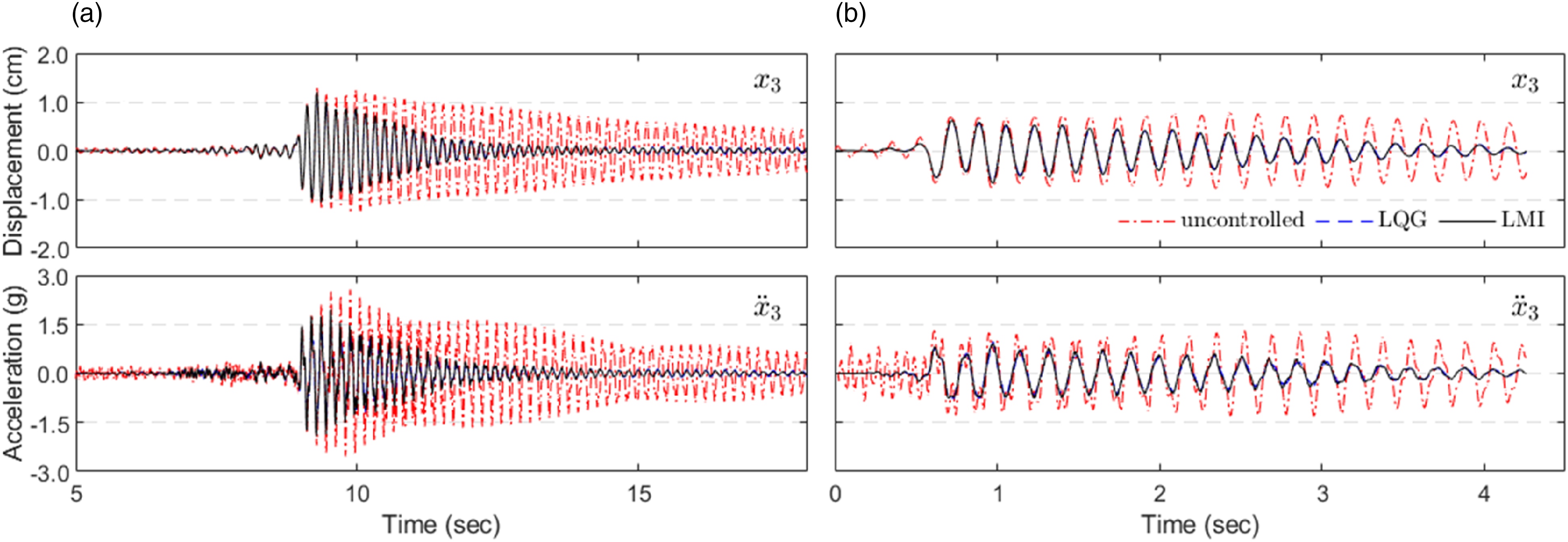
Verification of DORC design
The proposed method was applied to the state-space model described in the previous section. The discrete resilient observer and controller were designed based on discretized reduced-order system dynamics given by equations 46 and 47, based on the model of the structure together with a zero-order hold (ZOH) and sampler with 
A−LC is stable with all its eigenvalues inside the unit circle as shown in Figure 6. Eigenvalues for A-LC and A-BK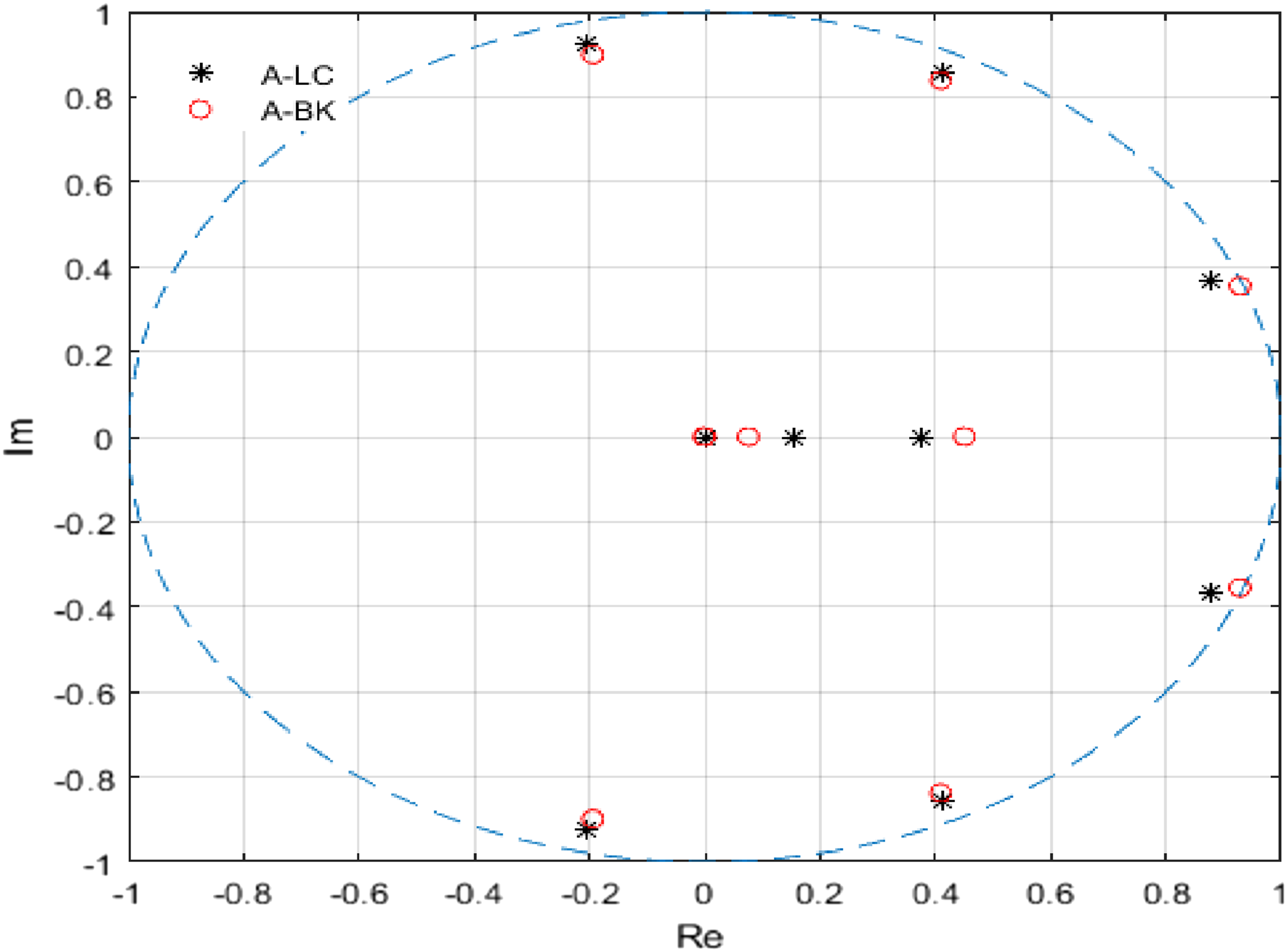
The discrete resilient controller is designed by using the proposed method. The same discretized reduced-order system model is used to design the controller. The parameters of the design for the resilient controller are 
The nominal closed-loop state matrix 
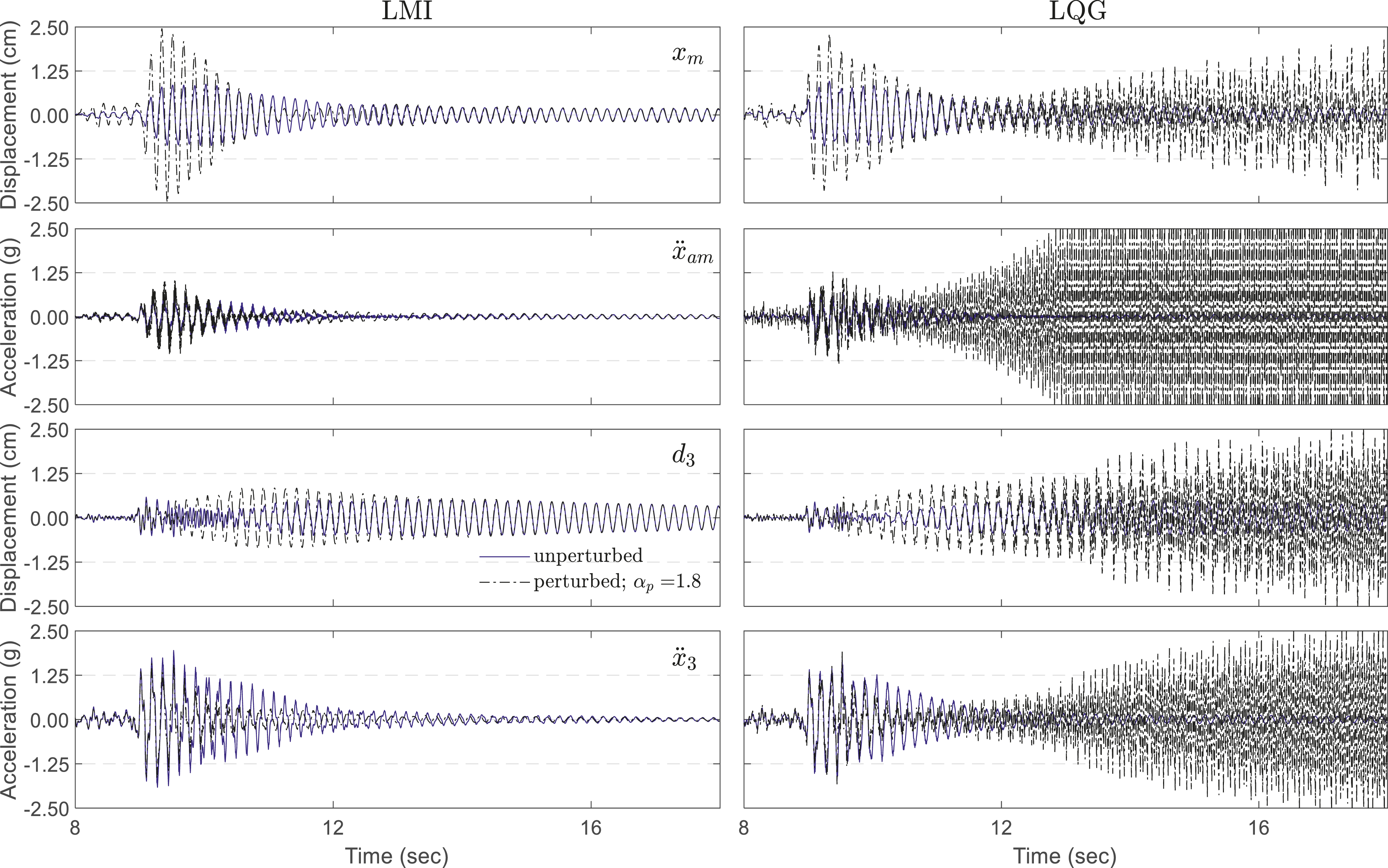
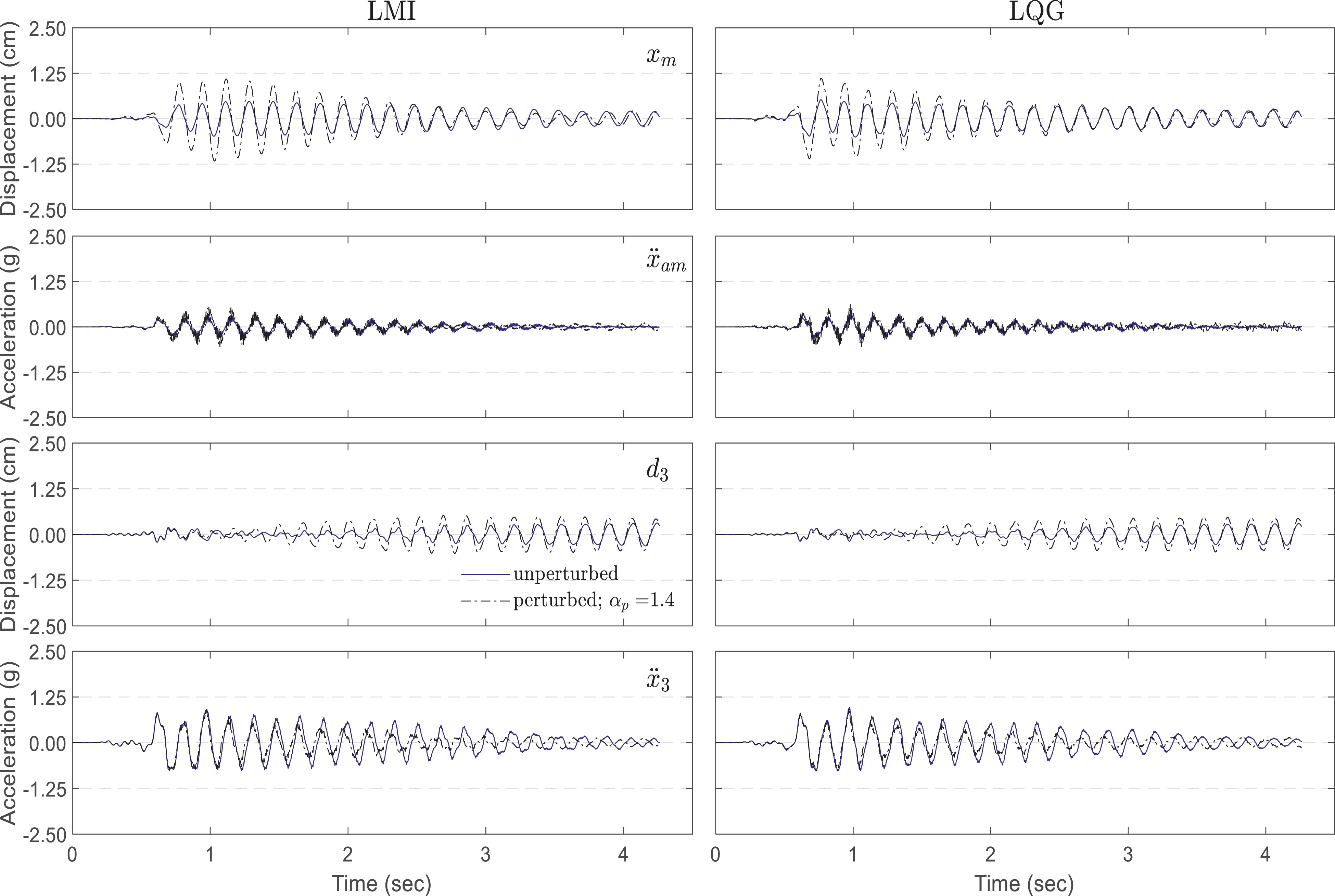
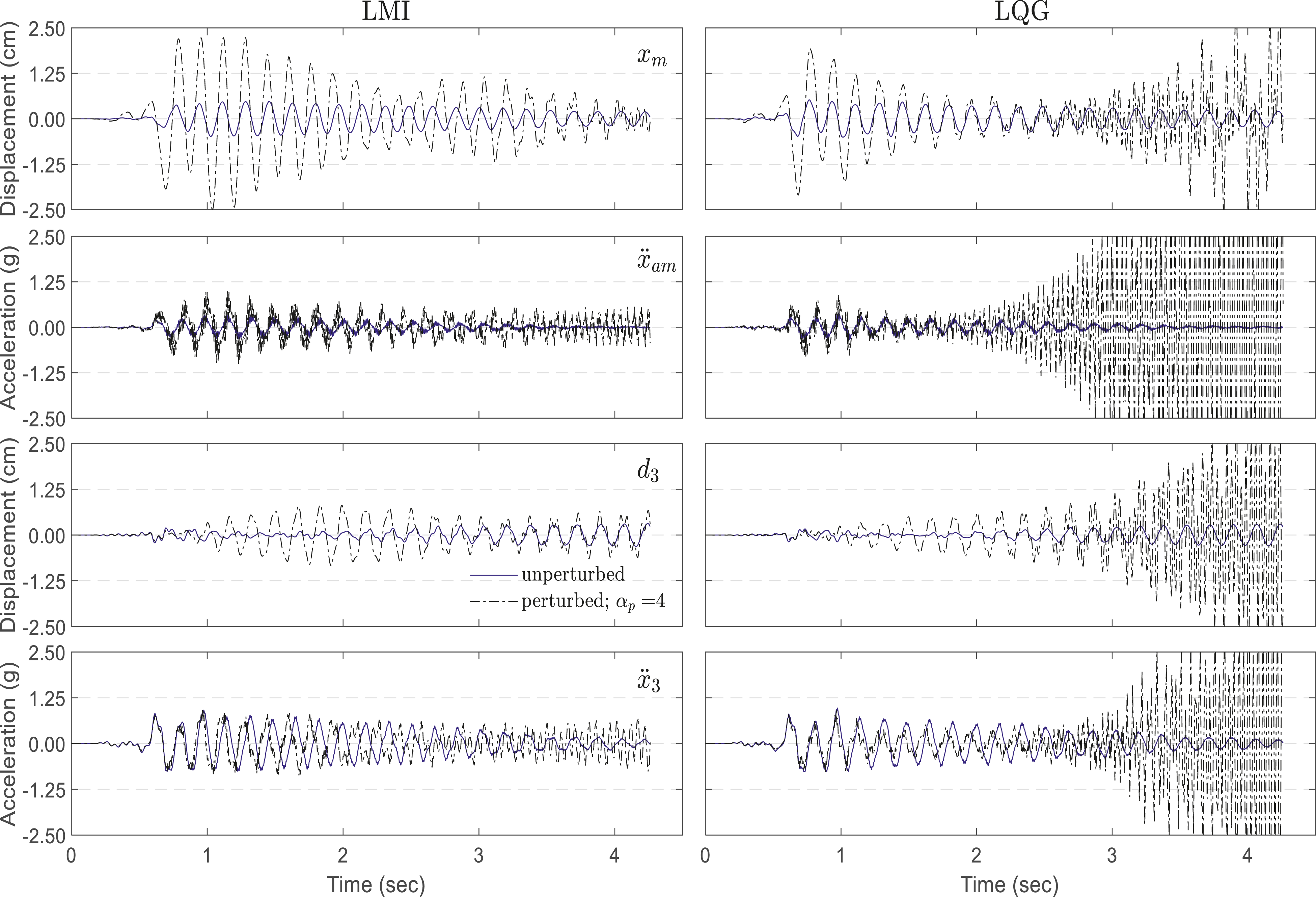
For the present study, the perturbation factor α p was varied from 1.2 to 4.0 to assess the effect of a range of perturbations in the controller gain on system performance.
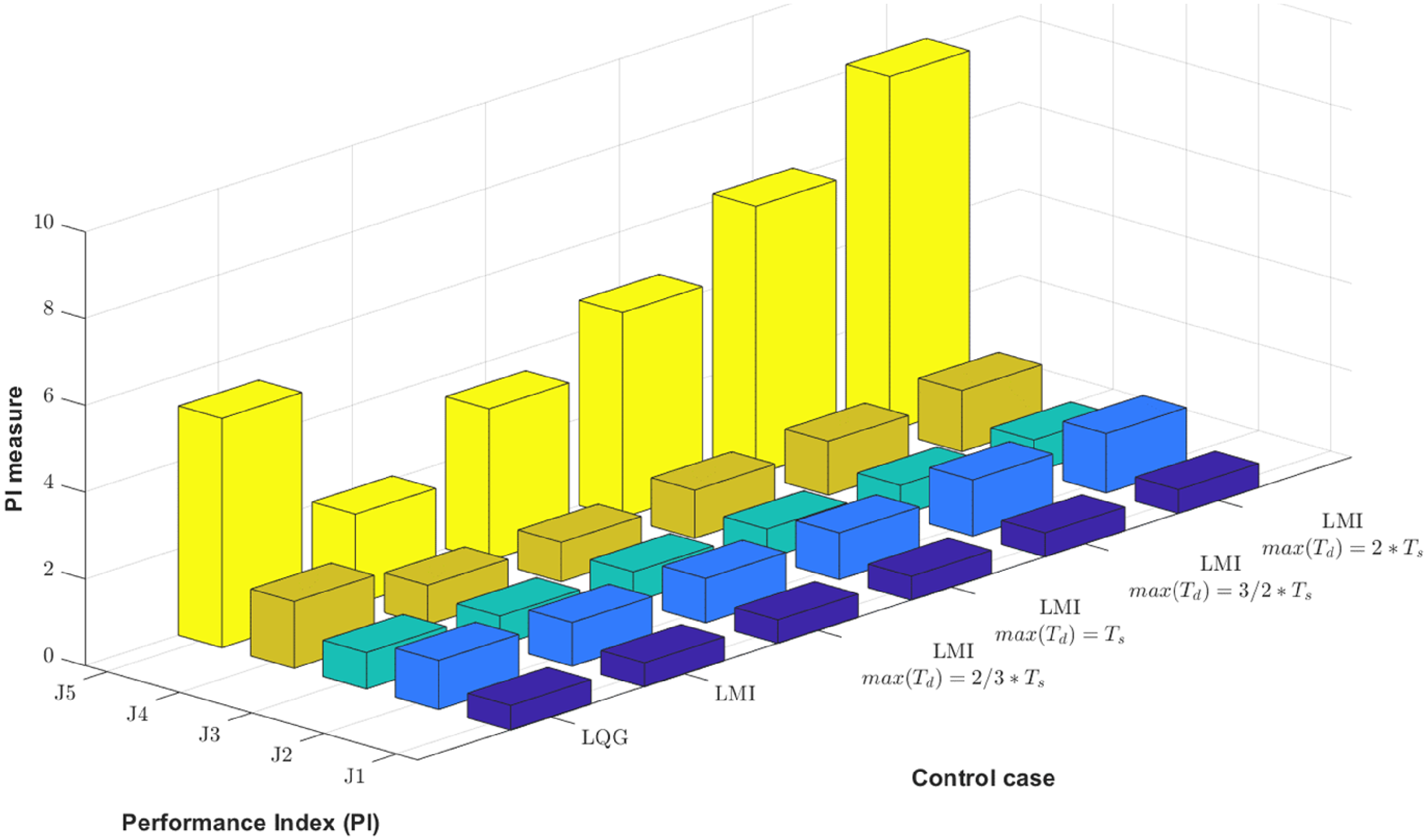
Figure 7 through 10 demonstrate seismic response comparisons for various unperturbed and perturbed systems for two of the ground motions; a relatively long duration, far-field (E02) and short duration, near-fault (E04). Response history comparisons are presented for displacement Response comparison—Ground motion: E02, Response comparison—Ground motion: E02, Response comparison—Ground motion: E04, Response comparison—Ground motion: E04, Performance index comparison for various time-delay cases.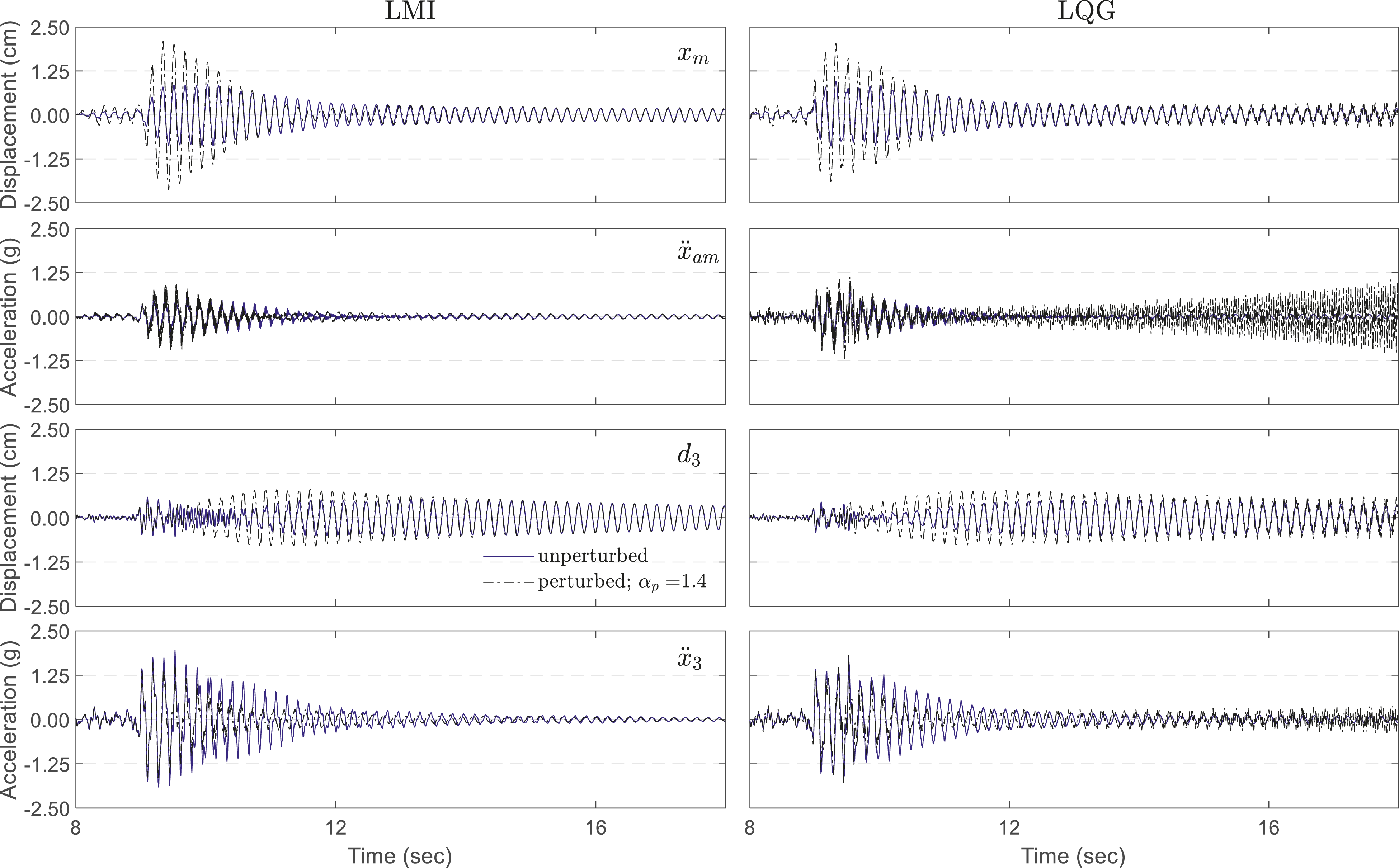
Verification of TDC in terms of time and frequency domain responses
Time-delay is inevitable in practical applications of active as well as semi-active control of structural systems. In a complete closed-loop system, various sources of time-delay can be identified due to network, computational time, and hardware (sensor data acquisition, actuator, etc.). While the total end-to-end time-delay within the control loop may typically be in the order of the system-sampling rate, larger random time-delays may be expected. The proposed LMI-based time-delay compensation (TDC) method addresses random time-delays up to the effective sampling period, and ensures stable response. However, its performance does not degrade due to larger random time-delays.
Maximum performance indices.

Effect of time-delay (Td(t) ≤ Ts/2) on the controlled response due to (a) E02 and (b) E04.
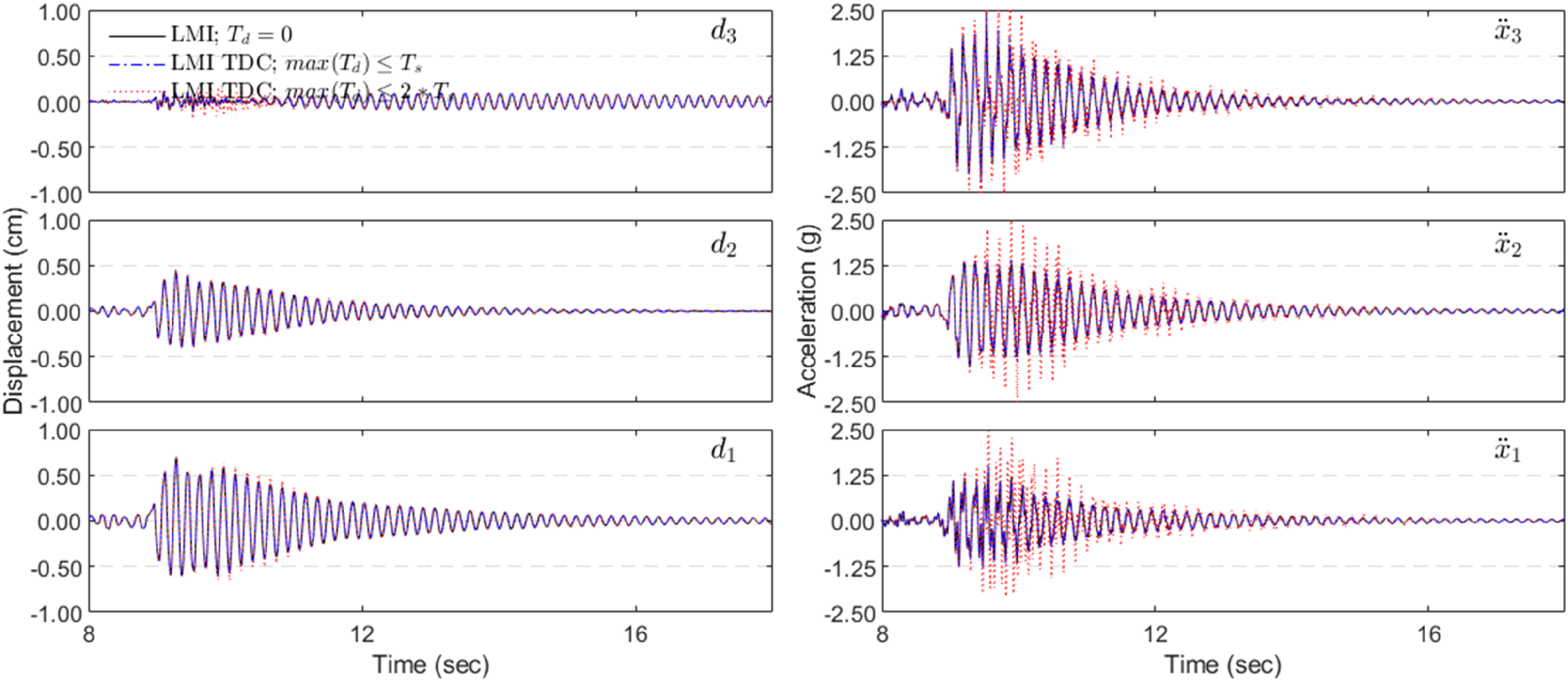
Seismic response due to E02 ground motion with time-delay control.
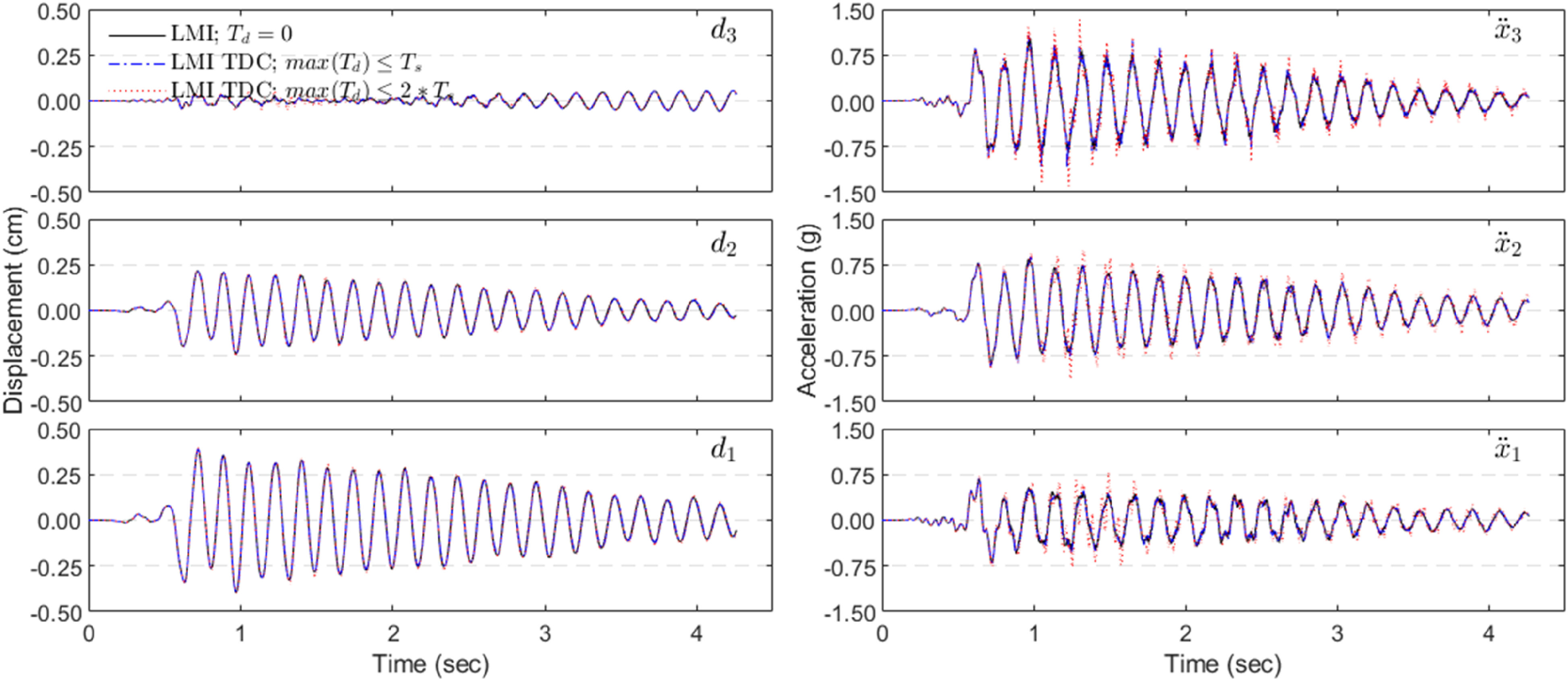
Seismic response due to E04 with time-delay control.
Finally, examples of frequency response functions (FRFs) and corresponding phase angles between the base excitations and third floor absolute floor acceleration response are shown in Figure 15 for two of the ground motions, namely E01 and E04. The figures present comparisons for cases with no time-delay Frequency response comparisons (a) E01 and (b) E04.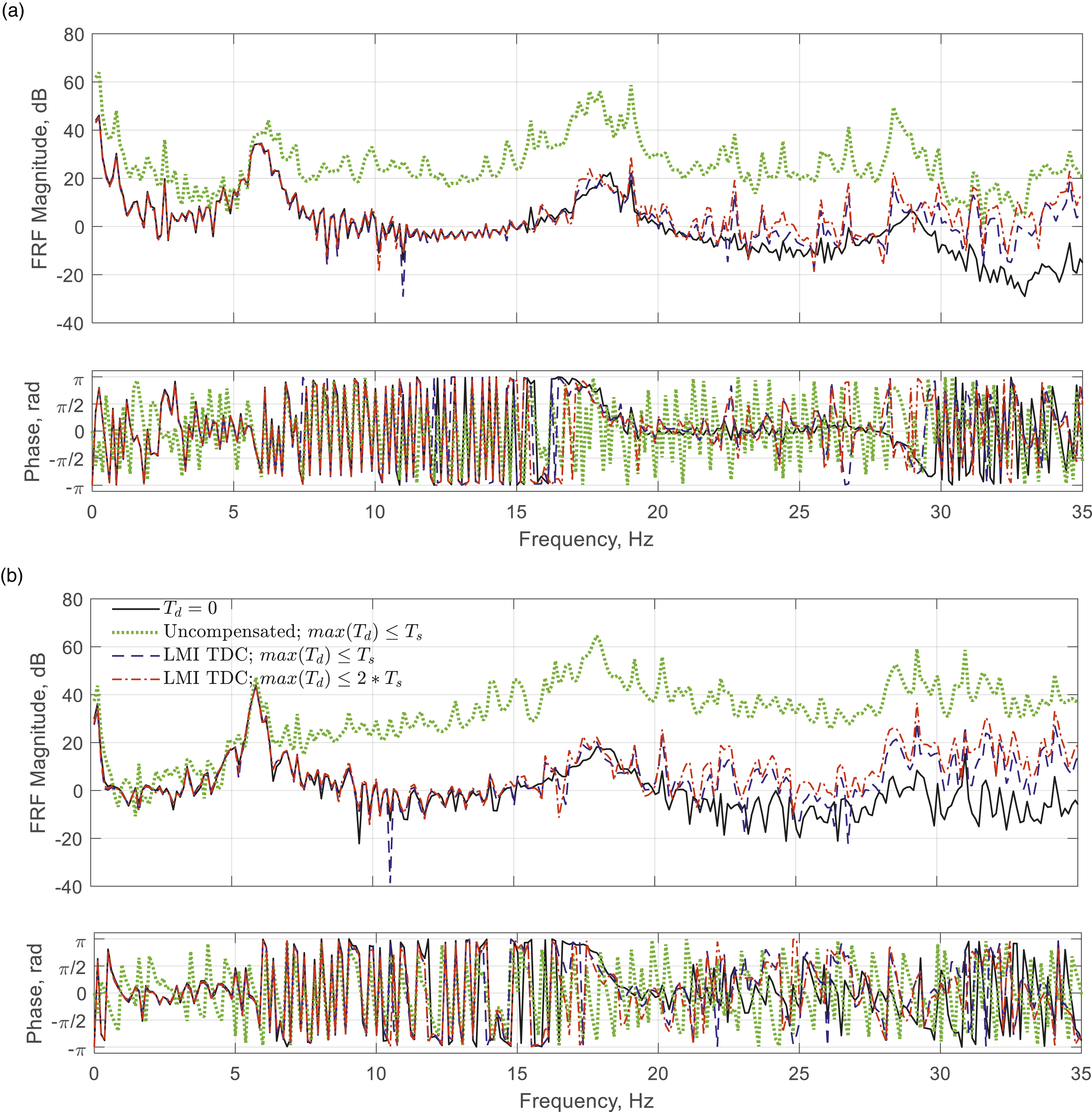
Conclusions
This paper proposes a resilient control system design for networked controlled structural systems. The controller design includes a resilient observer and controller designed using dissipative LMI. The design can tolerate errors in implementation, cyberattacks, and inevitable time-delays within the control loop. The NCS controller design is applied to a state-space dynamic model of a benchmark three-story structure with an active mass driver system using the SIMULINK MATLAB toolbox. The model was subjected to a series of historic far-field and near-fault ground motions. Simulation results indicate that the proposed NCS ensures resilient and stable structural response as demonstrated in both time and frequency domains. Furthermore, the network time-delays in the order of twice the sampling rate can be tolerated without significantly affecting the maximum response of the structural and control system. For further studies, the proposed approach can be extended to nonlinear models.
ORCID iD
Gökhan Pekcan https://orcid.org/0000-0002-9745-1603
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Appendix
Lemma-1:The Schur Complement [Boyd et al., 1994] For matrices
Proof