
Abstract
The discrete topology and sizing optimization of frame structures with compliance constraints is studied using a novel approach, which is capable of finding the theoretical lower bounds and high-quality discrete solutions in an efficient manner. The proposed approach works by reformulating the discrete problem as a relaxed semidefinite programming (SDP) problem. This reformulation is made possible by a linear relaxation of the original discrete space and the elimination of the nonconvex equilibrium equation using a semidefinite constraint. A continuous global optimum is first derived using existing solvers and then the discrete solution is discovered by the neighborhood search. Numerical examples are presented, including the sizing optimization of 2-Bay 6-Story frame and 3-Bay 10-Story frame, the topology and sizing optimization of 2-Bay 6-Story braced frame. A topology and sizing example with multiple load cases is also provided. The proposed approach and three other metaheuristic algorithms are used to solve these examples. Theoretical lower bounds for these examples can be efficiently discovered by the proposed approach. For the sizing problems, the discrete solutions by the proposed approach are all better than the other algorithms. For the topology and sizing problems, the proposed approach achieves discrete solutions better than genetic algorithm, but worse than the other metaheuristics. The computational superiority of the proposed approach is validated in all the examples.
Keywords
Introduction
In engineering practice, the design optimization of frame structures is a discrete problem as structural elements are selected from commercially available standard sections. When only the sizes of structural elements are to be optimized, the design task is a discrete sizing optimization problem. If the topology of structural elements is also considered, for example in the design of braced frames where only certain braces can exist, the design task becomes a discrete topology and sizing optimization problem.
These discrete optimization problems are quite challenging and have attracted tremendous research interests in the past few decades. Readers can refer to the survey papers (Arora, 2000; Arora et al., 1994; Huang and Arora, 1997a, 1997b; Saka, 2003; Saka and Geem, 2013; Thanedar and Vanderplaats, 1995) for a comprehensive understanding of the developments in the discrete optimization of frame structures. These researches are mainly concerned about inventing new optimization algorithms or methods so that satisfactory solutions can be acquired. Most of these optimization algorithms belong to metaheuristics, such as genetic algorithm (Camp et al., 1998; Pezeshk and Camp, 2000), particle swarm optimization (Gholizadeh and Fattahi, 2014; Talatahari and Azizi, 2020a), ant colony optimization (Camp et al., 2005; Kaveh and Shojaee, 2007), chaos game optimization (Talatahari and Azizi, 2020b, 2020c), and interior search algorithm (Talatahari and Azizi, 2020b, 2020c). Some of these algorithms may be feasible even for large scale problems (Fernandez-Caban and Masters, 2018; Talatahari and Azizi, 2020d), but due to the population-based searching mechanism, the computational efficiency of metaheuristics is usually not high. Also, no global optimum can be guaranteed by metaheuristics.
Besides metaheuristic algorithms, there are some optimization methods which solve the discrete frame optimizations in a continuous manner. In these methods, the discrete variables are first mapped into a continuous design space through interpolation schemes (Arora, 2000; Cai and Thierauf, 2007; Changizi and Jalalpour, 2017; Sarma and Adeli, 2000), based on which nonlinear programming formulations are established. These optimization methods can be very efficient, but only local optimum can be achieved for two reasons. As the interpolation schemes almost always involve high-degree polynomials, only nonlinear programming can be formulated and therefore the solutions are at most local optimum. Also, according to a previous study by the authors (Wang et al., 2020), the use of interpolation schemes is problematic in that many standard sections cannot be covered by the interpolation schemes, thus many sections have to be ruled out of the continuous design space.
In recent years, some global optimization approaches have been proposed for the discrete frame optimizations. A mixed integer linear programming (MILP) formulation was presented for designing periodic frame structures with negative poisson’s ratio (Rui and Kanno, 2014) and with negative thermal expansion property (Hirota and Kanno, 2015). In these two researches, the discrete variables are handled by the so-called multiple-choice constraints, namely a binary variable is assigned to each available section in the section set and the sum of all binary variables for one structural element equals one (for sizing optimization) or no greater than one (for topology optimization). Constraints including compliance and stresses can be included in the MILP formulation. In a later research, a mixed integer second-order cone programming (MISCOP) formulation was proposed for the discrete topology optimization of frame structures with compliance constraints (Kanno, 2016). The MILP formulation was also applied to discrete sizing optimization of frame structures with displacement and stress constraints (Van Mellaert et al., 2018). The discreteness was also treated by the multiple-choice constraint (Kanno, 2016; Van Mellaert et al., 2018). Such a discreteness-handling strategy is very flexible, allowing the consideration of all cross-sectional properties without introducing new variables. But an evident disadvantage is that the resulting formulations contain binary variables and are usually treated by implicit enumeration methods. Therefore, the computational efficiency is extremely low even for small-scale problems. For example, the most complex structure in (Van Mellaert et al., 2018) is merely a three-bay three-story frame with a discrete set of 15 available sections. The examples in (Kanno, 2016) appear to be complex, but with the prerequisite that the cross-sectional area of available sections are uniformly distributed, which however is seldom the case in engineering practice.
In order to find solutions with both theoretical and practical value for discrete frame optimizations in an efficient manner, a SDP-based approach is proposed for the compliance-constrained discrete frame design. Not only theoretical lower bounds for the discrete problem can be easily derived by the proposed approach, but also high-quality discrete solutions can be efficiently discovered. The SDP-based approach is built on a SDP formulation, which is realized through a linear relaxation of discrete variables using convex combinations of standard sections and the elimination of the equilibrium equation using a semidefinite constraint. The idea of replacing the equilibrium equation with a semidefinite constraint was originally proposed for truss optimizations (Achtziger and Kočvara, 2007; Kočvara, 2010), and in this paper the SDP formulation is extended to discrete frame optimizations. To the best of the authors’ knowledge, no SDP formulations for discrete frame optimizations have been proposed in the literature.
It should be emphasized that the extension of the SDP formulation from truss optimizations to frame optimizations cannot be directly realized since the behavior of trusses and frames are different. The element deformation in trusses can only be tension or compression, and for frames the deformations also include bending (and some other deformations if considered). Consequently, the stiffness matrix of trusses depends only on the element area, but the stiffness matrix of frames depends on the element area and moment of inertia (and some other cross-sectional properties if necessary). The dependency of the truss stiffness matrix on the element area is linear, but the dependency of the frame stiffness matrix on the element area and moment of inertia is not linear, because the area and moment of inertia are neither independent nor linearly linked. This difference makes impossible a direct extension of the SDP formulation from truss optimization to frame optimization. The frame stiffness matrix should be properly linearized, and the convex combination of standard sections is proposed for this purpose.
Discrete optimization of frame structures
The mathematical model for the discrete sizing optimization of unbraced frames with compliance constraints can be formulated as follows:




where
The mathematical model for the discrete topology and sizing optimization of compliance-constrained braced frames is almost the same, except that the discrete set of allowable sections for braces may be different:





where
As discussed before,
Semidefinite programming-based approach
Convex combination of standard sections
According to a previous research (Wang et al., 2020), standard sections can be uniquely determined by their Area and I. Thus, to continuously define the cross-sectional properties of structural elements, in this study a convex combination of standard sections is proposed:

where

Convex polygon for defining variables.
Based on the convex combination of standard sections, problem (1) to (2) can be rewritten as continuous design problems. As shown in Figure 1, the domain within the convex polygon, including the boundaries of the convex polygon, becomes the design space for the relaxed problems. In design of frame structures, sections with higher bending efficiencies are preferred and solutions to the continuous design problem will result with sections lying on the sides of the polygon with higher bending efficiencies. In other words, the sides with higher bending efficiencies become active boundaries, while the remaining sides are inactive, which are shown in Figure 2.
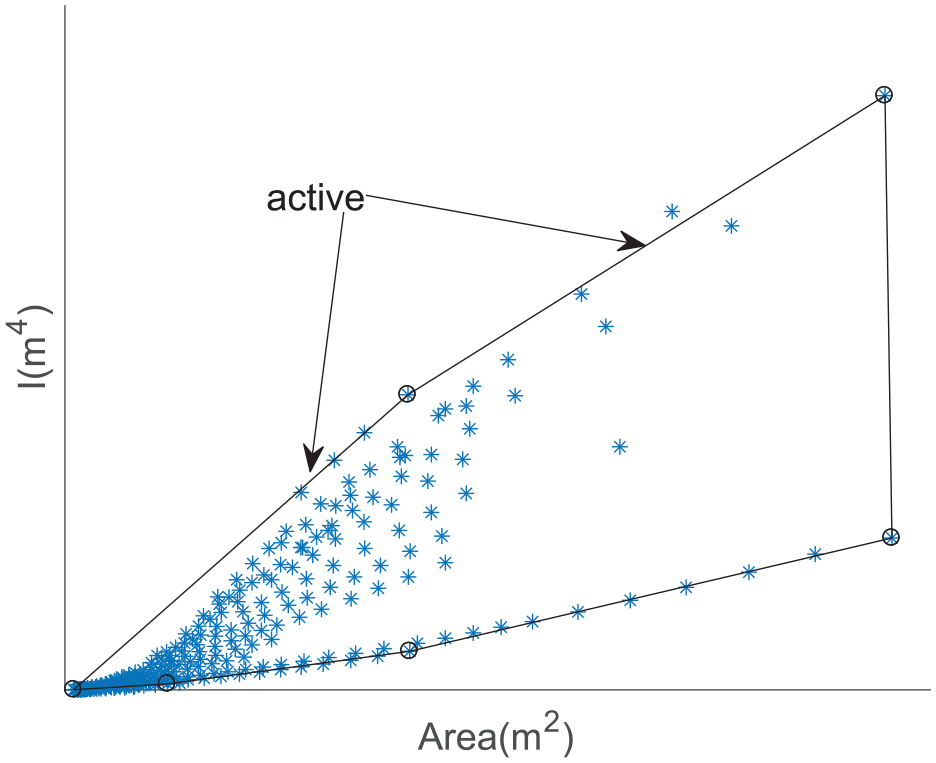
Active boundaries of convex polygon.
Figure 3 illustrates an example of the regressional relationship (Changizi and Jalalpour, 2017) between the moment of inertia and the area for I-beams (AISC-LRFD, 2001) with a majority of W-shape sections. It can be seen that the active boundaries of the polygon are close to the regressional relationship, and both serve the same purpose of confining the selection of sections within a reasonable domain. But the regressional model has to be differentiable (thus definitely nonlinear) and passes through enough standard sections. Therefore, certain requirements are implicitly imposed on the distribution of standard sections should the regressional relationships be applied. But the active boundaries of the convex polygon can be a collection of line segments, and not required to pass through many sections. The only requirement is that active boundaries should be close to standard sections so that in the neighborhood searching stage, the discrete solutions can be found within a close domain of the continuous optimum. Thus, compared to the regressional relationships, the definition of active boundaries is more flexible, and imposes fewer restrictions on the distribution of standard sections. Similarly, the definition of inactive boundaries is also very flexible since they are inactive in the optimum solutions. So, the convex polygon can be simplified by merging some of the vertices along inactive boundaries of the polygon.
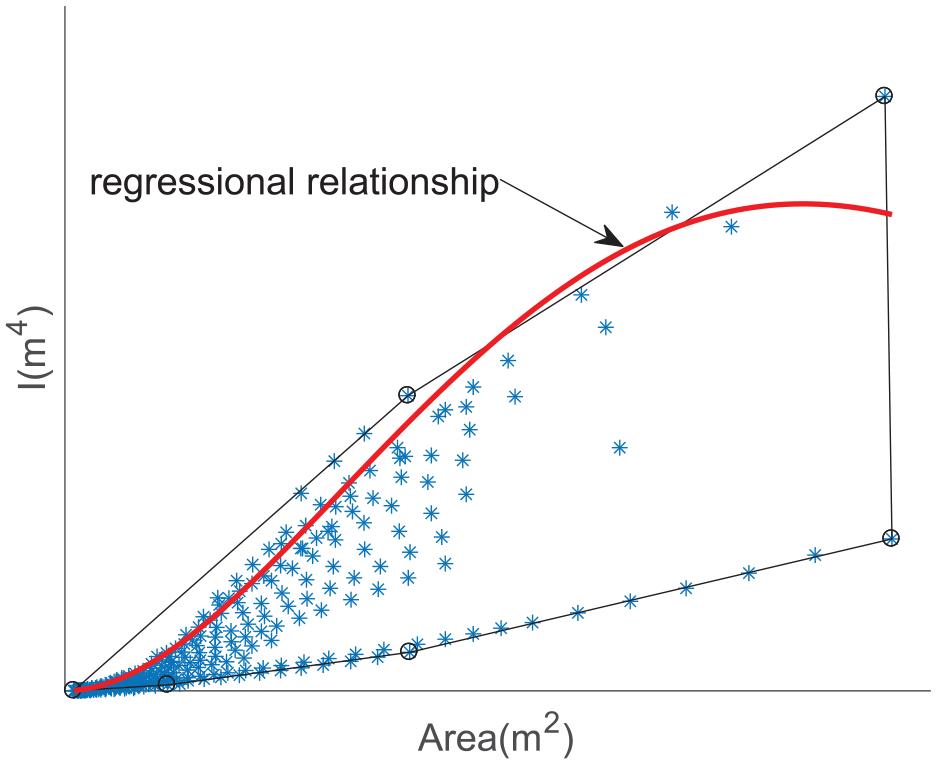
Convex polygon and regression relationship.
The convex polygon can be further simplified so that the active boundaries are closer to standard sections and the standard sections too large or too small are excluded from the design space. Shown in Figure 4 is a simplified convex polygon, which covers only a portion of standard sections. But, this simplified polygon is valid only when the final solutions do not contain sections that coincide with the maximum or minimum point of the simplified polygon. When the maximum point is included in the final solution, it means that the maximum point becomes an active boundary and the polygon should be expanded to include larger sections. Similarly, when the minimum point exists in the final solution, the polygon should be expanded to include smaller sections.
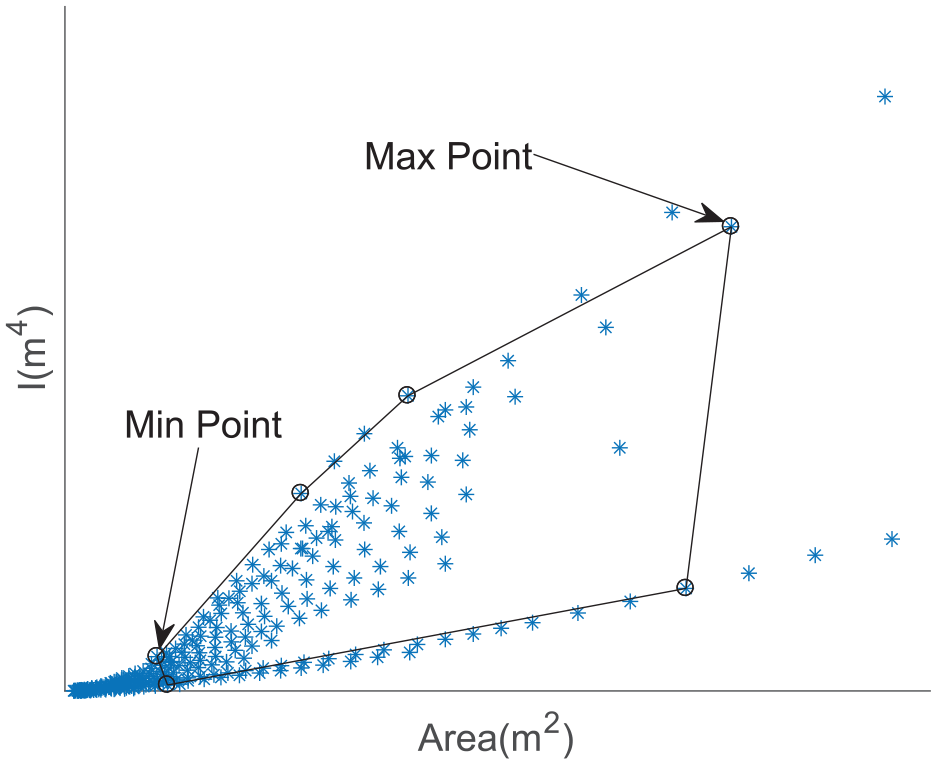
A simplified convex polygon for defining variables.
Based on the above discussion, the design variables have now become the coefficients of the convex combination. Consequently, the structural stiffness matrix is linearly dependent on design variables, which is a favorable characteristic that can be utilized to recast the relaxed problem into a SDP problem.
Problem reformulation
For a compliance-constrained truss, the following equivalence holds (Achtziger and Kočvara, 2007; Kočvara, 2010):

where the definitions of
Up till now, the above equivalence has never been applied to the optimization of compliance-constrained frame structures because the stiffness matrix of frames cannot be expressed as a linear function of design variables. But with the design variables being coefficients of convex combinations, the continuous relaxation of problem (1) can now be recast as a SDP problem:





Problem (5) can be solved globally using an off-the-shelf solver and the continuous global optimum serves as a theoretical lower bound for the discrete problem. Problem (2) can be similarly reformulated as a continuous SDP problem:






where
It should be noted that problems with multiple load cases can also be included (Kočvara, 2010) in problem (5) to (6), without changing the characteristic of these problems. An example of the discrete topology and sizing optimization problem with multiple load cases will be analyzed in Section 4.
Neighborhood searching method
After the continuous optimum solution is derived, the last step is to realize the continuous-to-discrete mapping. This can be achieved through various approaches, but these approaches are either troubled with a low computational efficiency, or with a poor computational accuracy. In this study a neighborhood searching method based on differential evolution (DE) (Rainer Storn, 1997) is adopted in order to achieve solutions of high qualities within an acceptable computational time. It should be noted that some other metaheuristic algorithms can also be used and DE is currently adopted because of its simple concept and easy implementation. The neighborhood is defined as sections that are close to the continuous solutions. For beams and columns, the distance is measured by Euclidean lengths in a two-dimensional space, defined by the cross-sectional area and the square root of moment of inertia. For braces the distance is directly measured by the cross-sectional area. The size of the neighborhood cannot be too large or too small, and a proper number of standard sections should be covered. Based on extensive numerical tests, it is empirically proved that three or four closest sections for one design variable are enough to define an appropriate neighborhood.
Optimization procedures
The optimization procedures of the proposed approach are summarized as follows:
(1) Define a convex polygon of standard sections in a two-dimensional space, as illustrated in Figure 1.
(2) Relax the discrete variables into linear continuous variables using equation (3).
(3) Reformulate the continuous problem as a SDP problem.
(4) Solve the SDP problem using existing solvers and the continuous global optimum is derived.
(5) Based on the continuous global optimum, a discrete solution is found using the neighborhood search method.
Numerical examples
Three types of compliance-constrained problems are presented here:
(1) The discrete sizing optimization problem, which include a 2-bay 6-story frame and a 3-bay 10-story frame.
(2) The discrete topology and sizing optimization problem, which includes a 2-bay 6-story braced frame.
(3) The discrete topology and sizing optimization problem with multiple load cases, which includes 2-bay 6-story braced frame with two load cases.
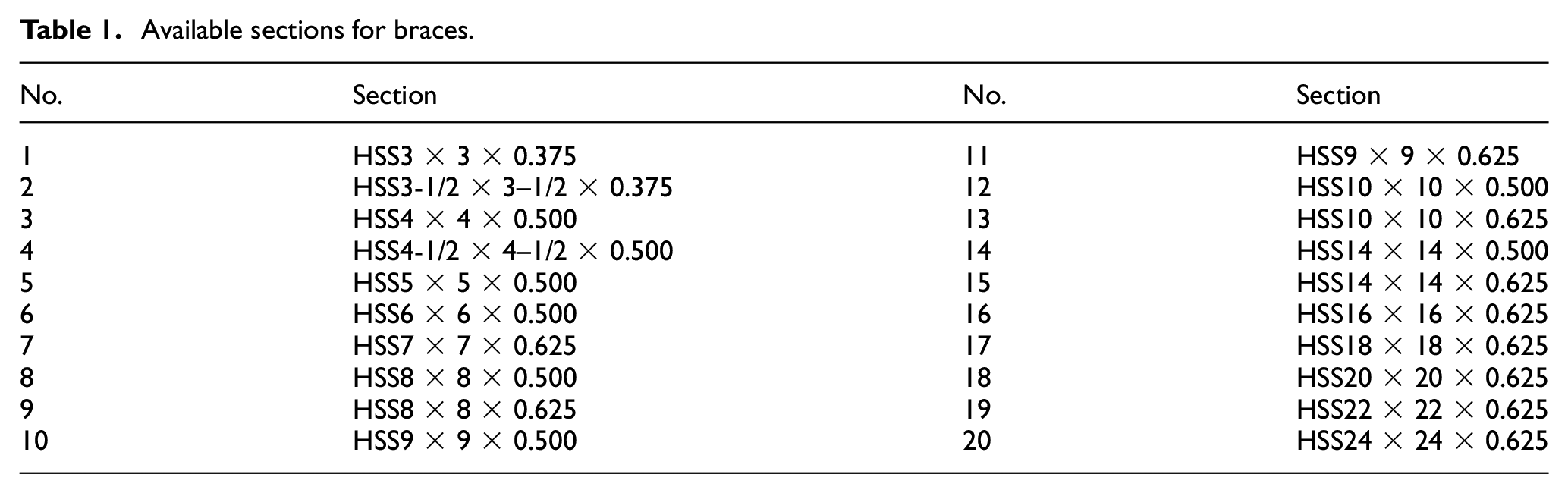
In these examples, the beams and columns are taken from 267 W-shape sections defined in AISC design manual, and the braces are selected from the standard profiles listed in Table 1. The material for W-shape sections and braces are the same, with an elasticity modulus of 210 kN/mm2 and a material density is 7850 kg/m3.
Available sections for braces.
These problems are first recast as relaxed SDP problems, and then solved by SeDuMi (Sturm, 1999), which can be invoked from within the software YALMIP (Löfberg, 2004). After the global optimum solutions are found, the DE-based neighborhood searching method is applied. The parameter settings of DE are given in Table 2. Since DE is a stochastic algorithm, the neighborhood searching process is run 40 times for each example. To validate the effectiveness of the proposed approach, the problems are also solved using three metaheuristics, including genetic algorithm (GA), chaos game optimization (CGO) (Talatahari and Azizi, 2020b, 2020c) and improved grey wolf optimizer (IGWO) (Nadimi-Shahraki et al., 2021). GA is implemented using the intrinsic ga solver of MATLAB ver.9.1 (MathWorks, 2016). The parameter configurations of these algorithms are also listed in Table 2. The three metaheuristic algorithms are run 40 times and the best solutions are derived. All these computations are performed on a notebook with 2.50 GHz 4-Core Inter i5 processors with 8 GB memory.
Parameter configurations of algorithms.
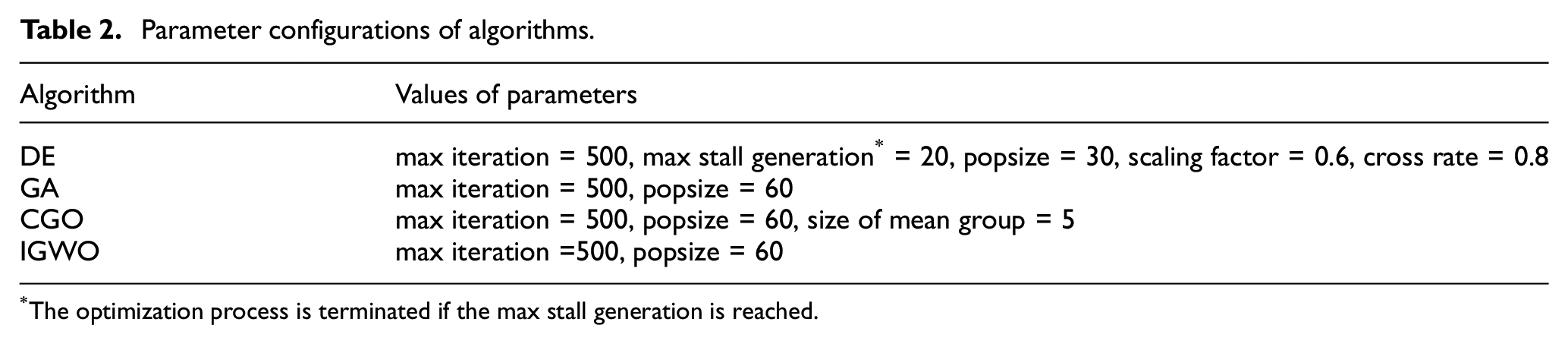
*The optimization process is terminated if the max stall generation is reached.
Discrete sizing optimization
The first example of the discrete sizing optimization problems is a 2-bay 6-story frame. The geometric configuration and the loads are as illustrated in Figure 5. The allowable compliance is set to 3000 for this example, and some other values can be used if needed. The proposed approach and the three metaheuristics are run 40 times. The optimum results are listed in Table 3. The structural weight of the continuous global optimum is 4780.5 kg, and the weight of the discrete solution by the proposed approach is 7277.7 kg. The gap between these two weights indicates that the standard sections of the currently selected section set are not very close to the continuous solution. If another set of standard sections which contains sections closer to the continuous solution is used, lighter structural designs will be achieved. The continuous solution serves as a theoretical lower bound for the discrete problem. The total computational time for solving the relaxed SDP is only 1.5 s. The best design by the proposed approach is respectively 4.35%, 2.81%, and 3.04% lighter than GA, CGO, and IGWO. The compliances of the optimum solutions by the SDP-based approach and GA are respectively 0.15% and 0.02% greater than allowed, while for CGO and IGWO the compliances are below the limit value. And the number of structural evaluations required by the SDP-based approach is only 15.74%, 31.67%, and 5.85% of the structural evaluations by GA, CGO, and IGWO, respectively. Although solving the relaxed SDP problems requires some extra computational efforts, still it’s safe to say that the efficiency of the proposed approach is far higher than the other three metaheuristics.
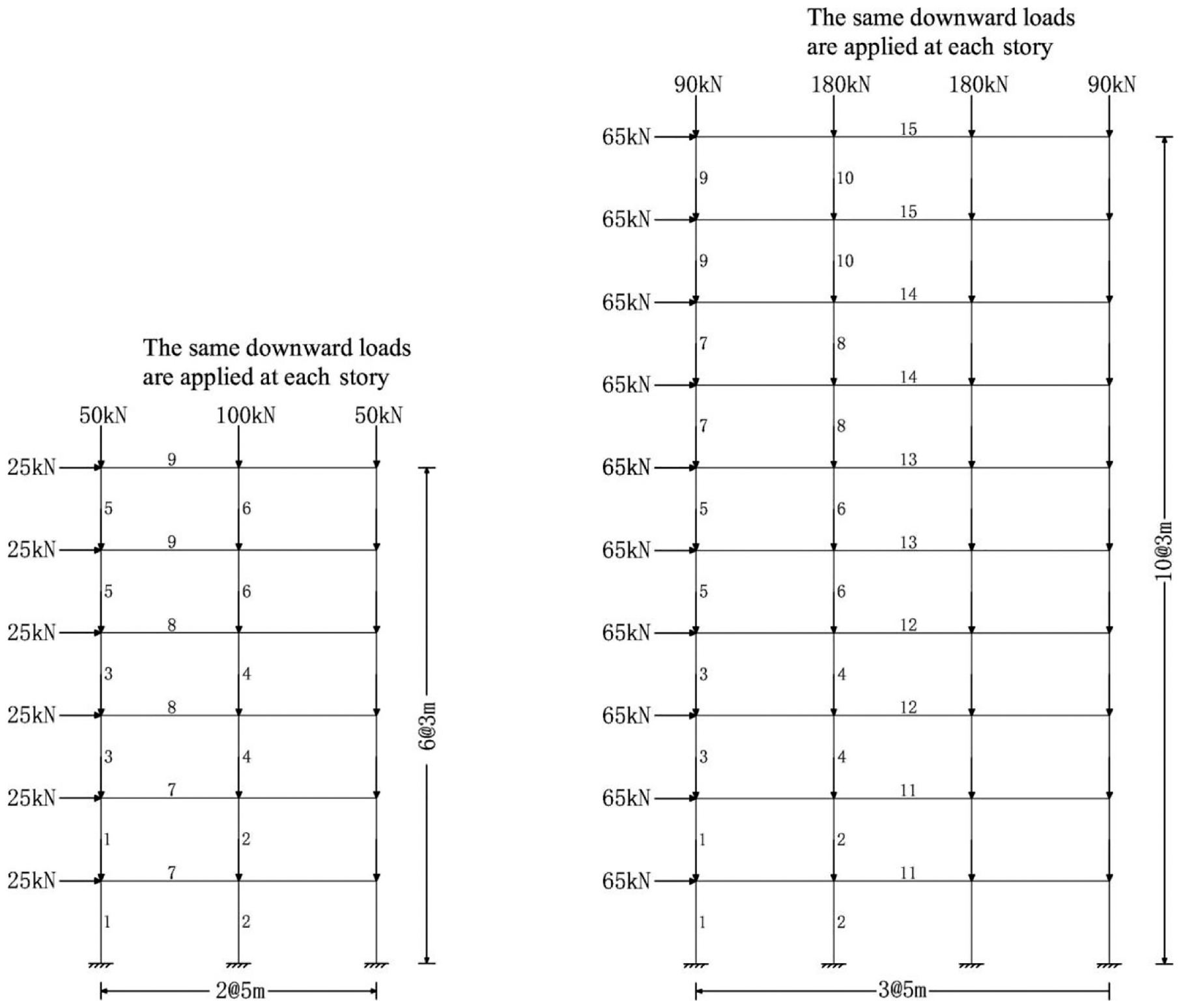
Sizing optimization of unbraced frames.
Optimum results for 2-bay 6-story frame.

*No. S.E.: number of structural evaluations for reaching the optimum solution.
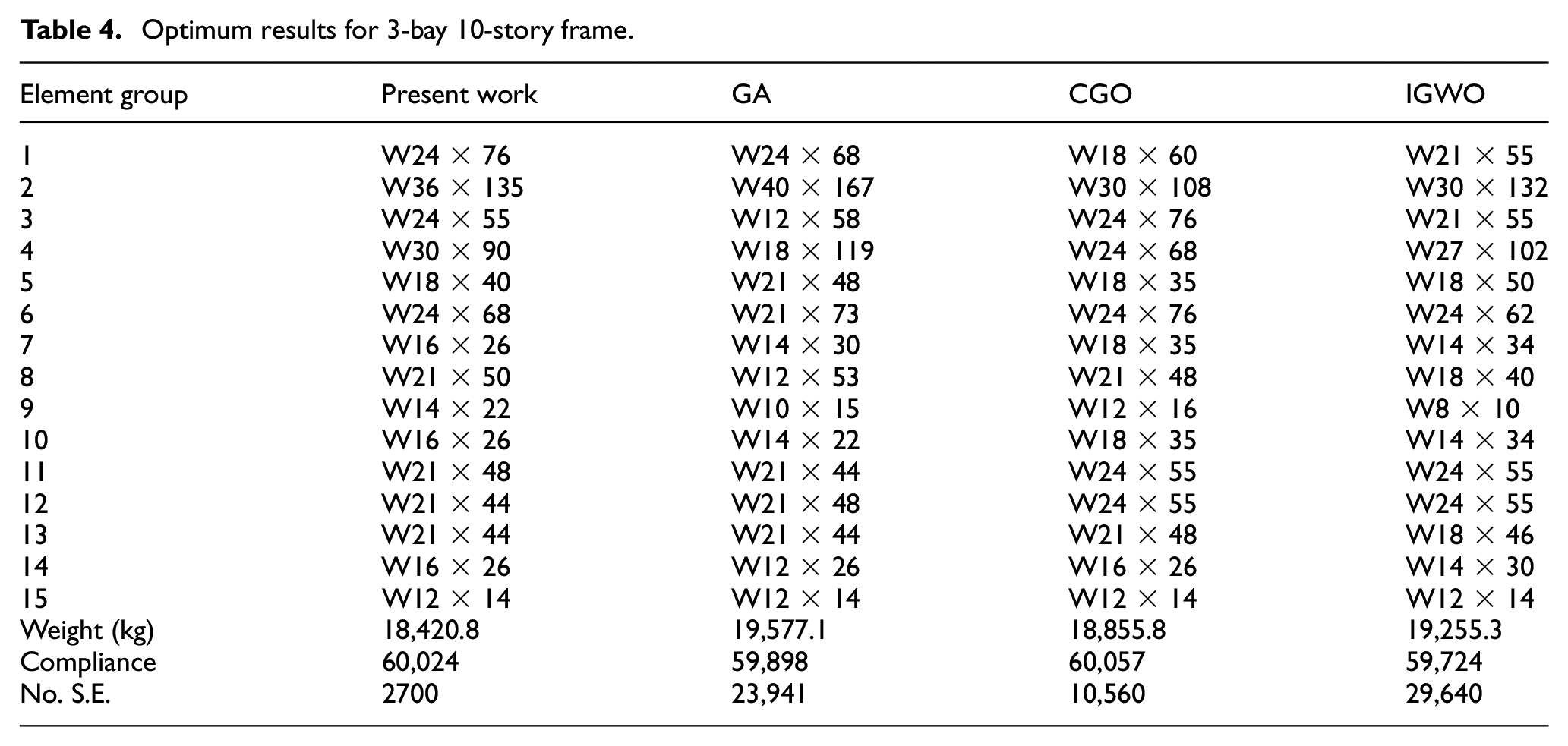
The second example for the discrete sizing problems is a 3-bay 10-story frame, and the loading conditions are as shown in Figure 5. The upper limit of compliance is set to 60,000. The optimum solutions by the proposed approach and the other metaheuristic algorithms are presented in Table 4. The theoretical lower bound for the example is 12,273.3 kg, and the weight of the discrete solution by the proposed approach is 18,420.8 kg. The relaxed SDP problem can be efficiently solved within 3.5 s. The best weight achieved by the proposed approach is respectively 5.91%, 2.31%, and 4.33% lighter than GA, CGO, and IGWO. The compliances by the proposed approach and CGO are respectively 0.04% and 0.09% greater than allowed, while the compliances by GA and IGWO are slightly below the limit value. The number of structural evaluations by this approach is only 11.28%, 25.57%, and 9.11% of the structural evaluations by GA, CGO, and IGWO. Compared to the first sizing example, the computational superiority of the proposed SDP-based approach becomes more evident as the number of design variables increases.
Optimum results for 3-bay 10-story frame.
Discrete topology and sizing optimization
A 2-bay 6-story braced frame with 21 design groups is considered, which is as illustrated in Figure 6. The allowable compliance for the structure is 3000. The sizes of beams, columns and the topology and size of braces are simultaneously optimized.

Topology and sizing optimization of braced frame.
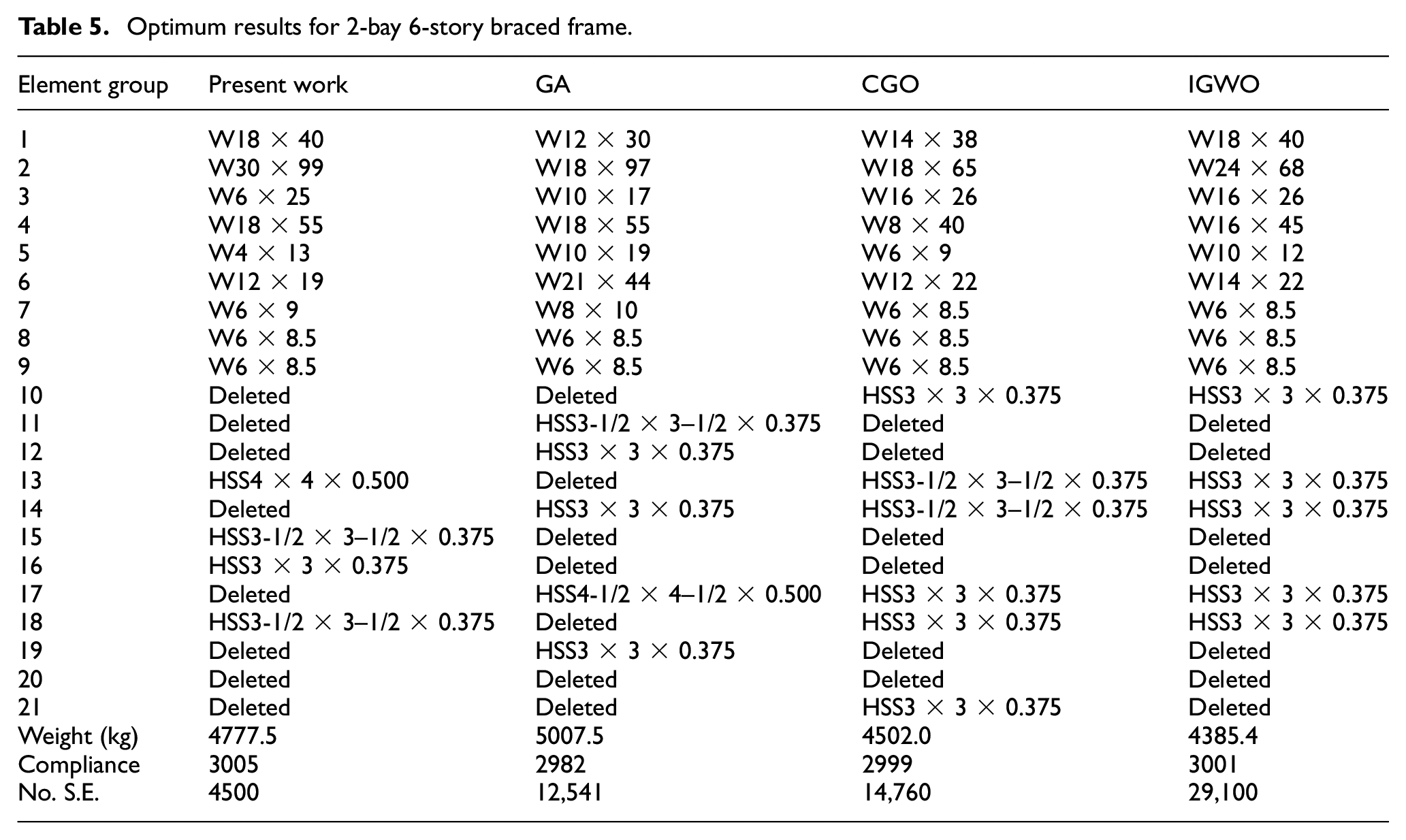
The optimum results are given in Table 5. The theoretical lower bound for this example is 3988.8 kg, and the weight of the discrete solution by the proposed approach is 4777.5 kg. A total of 1.8 s is needed for solving the relaxed SDP problem. The best weight by the proposed SDP-based approach is 4.59% lighter than GA, but is respectively 6.12% and 8.94% heavier than CGO and IGWO. The compliances of the proposed approach and IGWO are slightly greater than allowed, but still within acceptable boundaries. The number of structural evaluations by the proposed approach is respectively 35.88%, 30.49%, and 15.46% of the structural evaluations by GA, CGO and IGWO. For this example, the proposed approach remains highly efficient, but is outperformed by CGO and IGWO in terms of accuracies. The reason is also related to the search mechanism of the proposed approach. The proposed approach finds discrete solutions in the neighborhood of the continuous global optimum, and with an increasing number of design variables, high-quality discrete solutions may be positioned in a greater space centered in the continuous global optimum. Consequently, in order to find satisfactory solutions, the size of the neighborhood should expand accordingly, which would inevitably require more computational efforts. And with a fixed size of the neighborhood, the proposed approach can still outperform some metaheuristics (e.g. GA), indicating that the solutions by the proposed approach are of high qualities. The topologies of the optimum designs are illustrated in Figure 7.
Optimum results for 2-bay 6-story braced frame.
Optimized topologies for 2-bay 6-story braced frame: (a) present work, (b) GA, (c) CGO and (d) IGWO.
Discrete topology and sizing optimization with multiple load cases
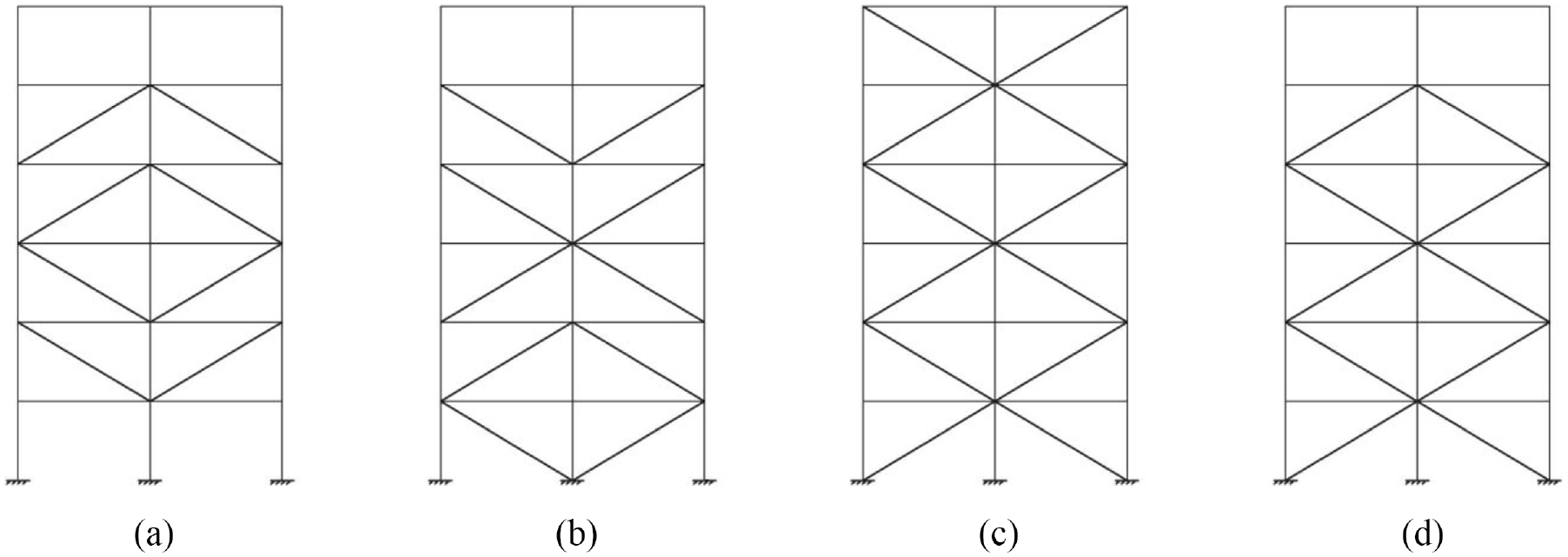
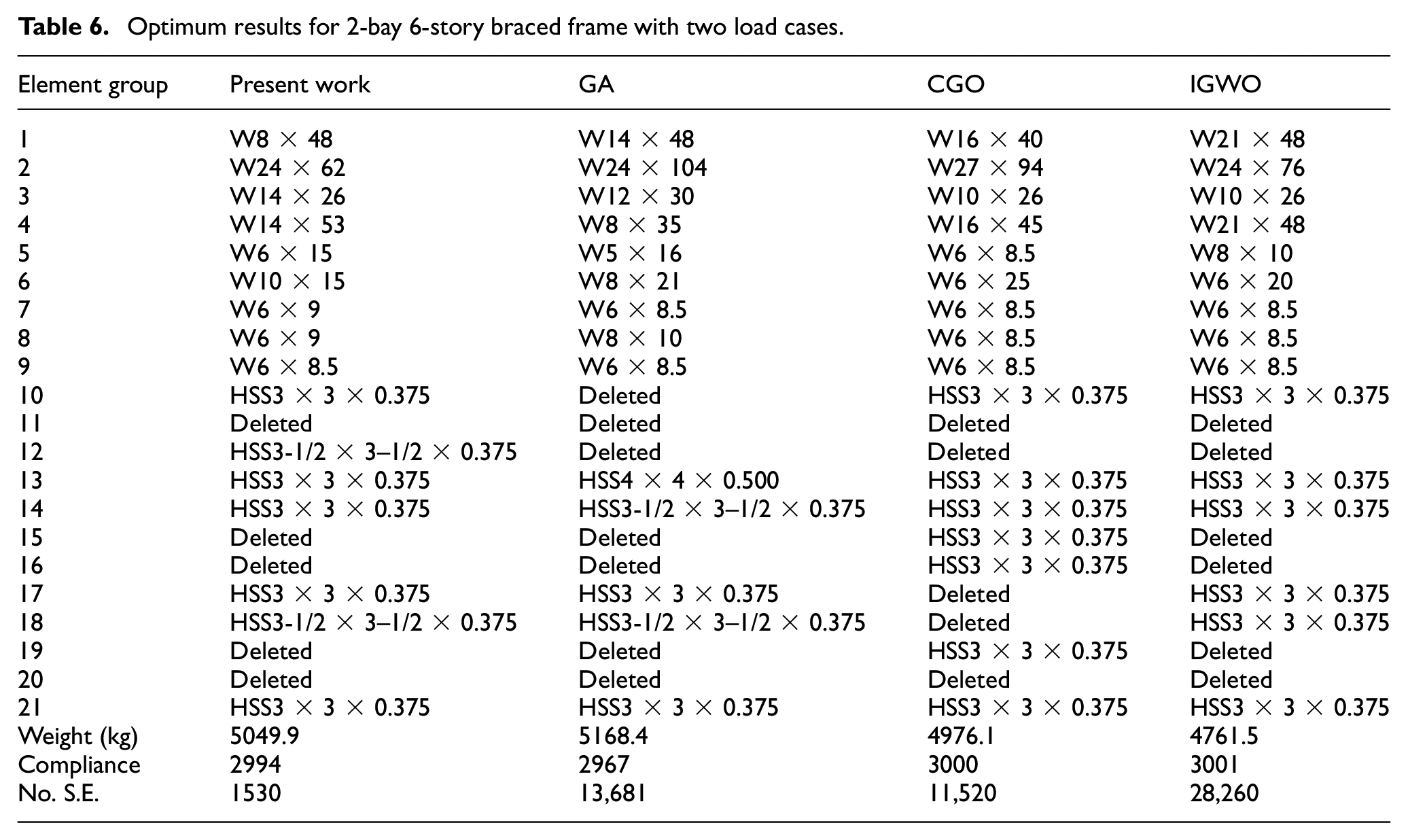
The 2-bay 6-story braced frame is optimized again, but this time the structure is subject to two load cases, as illustrated in Figure 8. The allowable compliance is set to 3000, the same as specified before. The four optimization approaches are used and the results are given in Table 6. The weight lower bound for this example is 4454.5 kg, and the weight of the discrete design by the proposed approach is 5049.9 kg. The best result by IGWO is quite close to the global optimum, as indicated by the theoretical lower bound. For this example 2.8 s are expected for solving the relaxed SDP problem. The optimum result by the proposed approach is 2.29% lighter than GA, but is 1.48% and 6.06% heavier than CGO and IGWO, respectively. The compliances of these optimum designs are all below or very close to the limit value. As to the computational efficiencies, the proposed approach achieves its optimum solution using only 1500 structural evaluations, which is only 11.18%, 13.28%, and 5.41% of that required by GA, CGO, and IGWO, respectively. Compared to the 2-Bay 6-Story braced frame with only one load case, the computational superiority of the proposed approach becomes more evident. Also, the weight difference between the SDP-based approach and the three metaheuristics is reduced, compared to the one-load-case example. This is reasonable because with additional load cases, the difficulty of finding satisfactory solutions increases. The SDP-based approach is less affected by the increased difficulty since the SDP-based approach searches only in the neighborhood of the global optimum, while the other approaches have to search in the whole design space. Thus, it’s more challenging for metaheuristics to find the final solution than the SDP-based approach. This difference in the search mechanism also explains the enhanced computational superiority of the proposed approach over metaheuristics. The topologies of the optimized frame are shown in Figure 9.

Topology and sizing optimization of braced frames with two load cases.
Optimum results for 2-bay 6-story braced frame with two load cases.

Optimized topologies for 2-bay 6-story braced frame with two load cases: (a) present work, (b) GA, (c) CGO, and (d) IGWO.
A discussion on the safety verification
No stress constraints are considered in these design examples. From a practical point of view, it is necessary to verify the safety of structures by checking the stresses. Fortunately, there is a parameter in the proposed SDP-based approach that can implicitly contain the stresses of structures within acceptable levels. This parameter is the upper limit of compliance. If the optimized structure has its stresses greater than allowed, a smaller upper limit of compliance should be imposed, which would of course require more structural material. And a greater upper limit of compliance should be used if the stresses in the optimized structure are well below the safety limit.
Conclusion
In this study a SDP-based approach is proposed for the discrete topology and sizing optimization problem of frame structures with compliance constraints. This approach is built on a linear relaxation of design variables and a relaxed SDP formulation. The linear relaxation is realized by the convex combinations of standard sections, making the stiffness matrix linear to design variables. The linearized stiffness matrix makes possible the reformulation of the nonconvex equilibrium equation and the compliance constraint into a semidefinite constraint. Thus, the discrete optimization problem is recast as a relaxed SDP problem and the global optimum solution for the relaxed SDP problem can be directly obtained using existing solvers. A neighborhood searching method based on differential evolution is applied to find the discrete solution.
Several numerical examples are presented, including the discrete sizing optimization of unbraced frames and the discrete topology and sizing optimization of braced frames. A discrete topology and sizing optimization example with two load cases is also considered. For comparison these problems are also solved by GA, CGO, and IGWO. For all these examples, the continuous global optimum solutions can be discovered by the proposed SDP-based approach in less than 6 s. For the sizing optimization examples, the discrete solutions by the proposed approach are all lighter than those by the other three algorithms. For the topology and sizing optimization examples, the discrete solutions by the proposed approach are lighter than GA, but heavier than CGO and IGWO. It is also proved that the computational superiority of the proposed approach can be enhanced by an increasing number of design variables or by additional load cases. In conclusion, the proposed SDP-based approach can not only discover theoretical lower bounds for the discrete problems, but also provide high-quality discrete solutions in a very efficient manner.
This study has focused on the discrete optimization of frame structures with only compliance constraints, but the fundamental frequency constraint can also be added into the problem formulation. The resulting problem remains a SDP problem (MathWorks, 2016), and can also be solved using the proposed approach. Of course, more numerical experiments are required, which will be conducted in future researches.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the Science and Technology Commission of Shanghai Municipality of China (Grant No. 19DZ1100202). Any opinion, findings, conclusions, and recommendations expressed in this article belong to the authors and do not necessarily reflect the views of the sponsors.