The ability of structural elements to absorb input energy through inelastic deformation and supplemental damping is a primary factor in determining structural damage during earthquake excitation. This study proposes an energy methodology for the seismic evaluation of single-degree-of-freedom (SDOF) systems, considering the effect of fluid viscous dampers (FVDs). The FVD is characterized by supplemental damping ratio, , and velocity power . A computer algorithm is developed for the numerical simulation of SDOF systems using nonlinear time history analysis, which is verified through a number of validation examples. This study focuses on issues related to input and hysteretic energies with particular emphasis on near-field records and their interrelationship with seismic response demand, which is defined as non-dimensional indices for SDOF systems without FVD and those equipped with FVD. The energy indices ( and ) are the ratios of input and hysteretic energies to maximum displacement demand, respectively. The results show that the natural period , ductility level , , and have a significant effect in the determination of energy spectra . The non-dimensional is a more stable and reliable indicator than to quantify the damage potential of ground motion. Finally, the observations of the energy approach provided in this study indicate that it can be used as a useful tool for developing energy-based guidelines for structures incorporating FVDs.
Seismic design philosophy of structures depends on energy dissipation through the amount of inelastic deformation. Structures are considered having adequate seismic resistance and energy dissipation capacity if their maximum capacity exceeds the seismic demand under strong earthquakes. However, the main issue encountered is the determination of the seismic performance of the structure associated with the maximum response, considering the ultimate capacity of yielding members, and correlating this peak response with respective seismic demand. Currently, the design codes for earthquake engineering allow structural components to have sufficient ductility to satisfy seismic design without causing damage, which are based on the strength and displacement-based design (ASCE7-2016; FEMA 356). However, another parameter is called energy balanced formulation, where the input energy imparted to the structure is balanced by the energy dissipation capacity of the structural system. It appears that energy-based seismic design has great potential for calculating seismic requirements and designing structural members, which includes both strength and displacement characteristics of the structure. This approach was initially discussed at the First World Earthquake Engineering Conference [Housner, 1956]. The energy principles to determine the amount of energy transferred to the structure and design of structural members have gained popularity among the researchers (Akiyama 1985, 1988; Bertero and Uang, 1988; Krawinkler, 1987; Kuwamura and Galambos, 1989; McCabe and Hall, 1989; Minami and Osawa, 1988; Tembulkar and Nau, 1987; Uang and Bertero, 1990; Zahrah and Hall, 1984). Therefore, the use of energy concepts and damage models in seismic analysis and design of the structures was firstly discussed as part 1 of a conference entitled by nonlinear seismic analysis of reinforced concrete buildings in Bled, Slovenia, Yugoslavia (Fajfar and Krawinkler, 1992). Since then, the researchers have done a great effort to estimate the energy demands in structural systems for the determination of the amount of energy dissipated, including inelastic deformation and supplemental damping (Chai and Fajfar 2000; Chou and Uang 2000; Decanini and Mollaioli 1998, 2001; Dindar et al., 2015; Fajfar and Vidic 1994a, 1994b; Manfredi Gaetano, 2001; Leelataviwat et al., 2002; Riddell and Garcia, 2001). They found that the use of energy spectra provides an excellent estimation for structural damage because it covers a wide range of structural properties and ground motion characteristics related to seismic design.
If the potential energy demand on a structural element is higher than that can be accommodated by its elastic deformations, the element yields and sustains some damage. The protective systems provide the energy to improve the energy dissipation capacity, to achieve a higher level of seismic performance, and to avoid damage to components of gravity-load-resisting frames in buildings. These systems may take the form of seismic base isolation systems or supplemental damping devices. These devices attached to the main structural system to absorb the input energy are called dampers; commonly used are fluid viscous dampers, visco–elastic dampers, friction dampers, and yielding metallic dampers. More details on the mechanical operations and working principles of these devices can be found in (Constantinou et al., 1998; Soong and Dargush, 1997). The primary motivation for the analysis of these systems was the determination of displacements, velocities, accelerations, and forces. These are the quantities that have historically been of the most importance. However, with introducing innovative structural design concepts such as structural protection systems, it is necessary to reconsider current existing analysis and design techniques. The emphasis on energy as a design requirement, in particular, is theoretically more attractive. Therefore, the objective of this work is to improve the knowledge base on the energy demands of single-degree-of-freedom (SDOF) inelastic systems equipped with fluid viscous damper (FVD) through showing the effect of FVD characteristics, represented by supplemental damping ratio , and velocity power , using nonlinear time history analysis. FVDs have been studied analytically and experimentally due to their advantages in reducing seismic demands, increasing energy dissipation capacity, and in developing forces that are typically out-of-phase of the original systems. The basic properties and operations for using FVD have been guided by many researchers and engineers (Constantinou and Symans, 1992; Reinhorn and Constantinou 1995; Soong and Dargush 1997; Ramirez et al., 2001; Christopoulos and Filiatrault 2006; Black and Makris 2007; Symans et al., 2008; Doflot and Taylor 2008; Taylor 2015; Taylor 2016). Nonlinear FVDs with could dissipate 11% more energy per cycle than a linear one when subjected to a harmonic motion with the same amplitude (Constantinou and Symans, 1992). Generally, a linear FVD is more capable of suppressing higher modes and has the least interaction with structural forces that are in-phase with structural displacements (Doflot and Taylor, 2008). Linear FVDs may develop excessive damping forces in applications for structural systems with higher velocities, for example, in long-period structures exposed to intense ground vibration, especially for near-field ground motions (Lin and Chopra 2002). FVDs with are the most common values for seismic energy dissipation to control the FVD forces (Christopoulos and Filiatrault 2006; Taylor 2015, 2016; Agrawal and Amjadian 2016). Nonlinear FVDs provide a higher reduction in displacement response than the linear FVDs (Martinez-Rodrigo and Romero 2003; Ras and Boumechra 2014; Tubaldi et al., 2015; Dall’Asta et al., 2016), while it leads to an increase in peak accelerations at some floors compared to linear FVDs (Pavlou and Constantinou 2006; Kitayama and Constantinou 2018; Chalarca et al., 2020). Buildings with low and moderate fundamental periods are more sensitive to FVD characteristics than those with higher periods (Dall’Asta et al., 2017).
The energy balance equation of SDOF system (Uang and Bertero 1990) can be redefined to include the effect of supplemental FVD
where, is the relative displacement, is the relative velocity, is the relative acceleration, is the natural frequency, is the natural frequency, is the restoring force of the original system and represented by a bilinear constitutive model, is the viscous damping force generated by FVD, and is the earthquake ground motion excitation history.
The force generated by FVDs subjected to earthquake excitation since the response is more influenced by the characteristics of ground motions has proposed by (Lin and Chopra 2002); and expressed by
where, peak structural displacement response at each natural period of the system. The presence of terms related to the response in the equation (2), it requires obtaining the solution through iterations. is the velocity power of FVD and the constant is a modification factor for velocity power considering the nonlinearity effect of FVD (Lin and Chopra 2002).
The terms of the left-hand side of equation (1) represent the energy components of structure, defined as kinetic , inherent damping , absorbed , supplemental damping provided by FVD energies. The right-hand side of the equation (1) represents the input energy imparted to the structure due to earthquake ground motion. For inelastic systems, the absorbed energy is divided into elastic strain energy and hysteretic energy caused by elastic and inelastic deformation of the system, respectively, where is the elastic stiffness. For the original systems without FVDs, the input energy imparted into the structure system within the earthquake excitation is stored and dissipated by four terms of energies. However, for systems equipped with FVDs, the input energy imparted into the structure system within the earthquake excitation is stored and dissipated by five terms of energies. Since the supplemental FVDs are intended to dissipate imparted energy, the migration of energy in the structure during the earthquake shaking is considered. A rain-flow to understand the flow of energies for systems equipped with supplemental damping devices was presented by (Christopoulos and Filiatrault 2006). Briefly, the earthquake gives energy to the structure, termed the , where it depends on the characteristics of the structure and the ground motion. This energy excites the building, which oscillates back and forth as energy is transferred from maximum strain (or potential) energy, when it is at maximum displacement, to maximum when the building is near its equilibrium position with maximum velocity. For the building that responds elastically, this oscillation from maximum to maximum is dissipated due to inherent damping and, if they are incorporated, also due to supplemental damping devices . If the is large enough, then the energy will also be dissipated by hysteretic behaviour which comes from inelastic deformation of plastic hinges of beams and columns in the structure.
This work aims to improve the knowledge base on energy demands and energy indices for SDOF original systems without FVD (uncontrolled systems, UNCLT) and those equipped with linear and nonlinear FVD (controlled systems, CLT) subjected FEMA P695 near-field ground motions. A computer algorithm is developed to estimate the energy demands; considering the 3% inherent damping ratio that is often adopted in previous research studies and often assumed in design (Kazantzi et al., 2020). The bilinear plastic constitutive model (elastic-perfectly plastic), which is one of the most commonly used models for computing plastic deformations and energy terms for SDOF systems in earthquake engineering, is adopted here (Chopra, 2006). The first part of this work aims to: (1) quantify the input and hysteretic energies for inelastic SDOF UNCLT and CLT systems; and (2) show the effect of ductility level , supplement damping ratio , and velocity power of FVD as a function of natural vibration of systems on the energy demands. The second part of this work investigates the relation between the maximum displacement of SDOF response with energy demands , which are defined as non-dimensional energy indices ( and ). These indices proposed so far by previous research (Fajfar and Vidic 1994; Teran-Gilmore 1998; Kalkan and Kunnath 2007) based on UNCLT SDOF systems only. Unlike the spectral value of energy, the use of energy indices ( and ) is beneficial, because their quantities consider the amount of if the maximum displacement demand is known. Thus, it can be considered the most stable parameters in energy analysis (Kalkan and Kunnath 2007).
Computation of the system responses and energy terms
A computer algorithm is developed using (MATLAB 2019a release) to calculate energy spectra and energy indices for UNCLT and CLT SDOF systems under earthquakes. MATLAB has a number of tools for numerically solving ordinary differential equations. An ordinary differential equation (ODE) contains one or more derivatives of a dependent variable, y, with respect to one independent variable, . The system solution is obtained iteratively. The system of ordinary differential equations ODE using higher order numerical methods (Runge-Kutta expansion) to reduce error and cost of speed that is selected for the solution of structural UNCLT and CLT SDOF systems based on equation (1). The most popular code implemented in MATLAB for solving high order problems is the ODE15s which uses the numerical differentiation (Gear 1971; Shampine and Reichelt 1997). This study is based on the algorithm that supports the ODE15s. This algorithm is based on Runge–Kutta 4th-order. RK4 is a four-stage explicit Runge-Kutta method which means that to advance the numerical solution in one-time step four function evaluations are needed. Numerical simulation of this system consists of a set of differential equations for dynamic analysis of systems under earthquakes. The seismic ground motion equation is treated as a general initial value problem that involves finding a function that satisfies the following equations built-in ODE15s. The software MATLAB package offers a set of codes to solve initial value problems with a finite time interval [, ]:
The original set of nonlinear equations are replaced by a linearized approximate set of equations.
As introduced in Computation of the system responses and energy terms, inherent damping ratio , structural period Tn and are characteristics of the original structural systems, and are properties of the FVD. The term is the maximum deformation and it is usually normalized and expressed in the term of ductility level . The constant-ductility approach is preferred in the calculations to permit the maximum deformations to be expressed in non-dimensional terms as indices of inelastic deformation under different earthquake records. The constant-ductility approach obtained by changing iteratively at the system’s yield level with initial stiffness to determine the required strength in order to obtain a ductility response equal to the target ductility, for each SDOF (Chopra 2006). Once these parameters and the ground motion are selected, the displacement response of the SDOF system can be numerically solved by equation (4) using the ODE15s tool, and then the energy terms and energy spectra. The required system strength is changed iteratively (which affects ) until the ductility level obtained by nonlinear dynamic analysis is within ±5% of the target ductility.
Verification of the developed computer algorithm
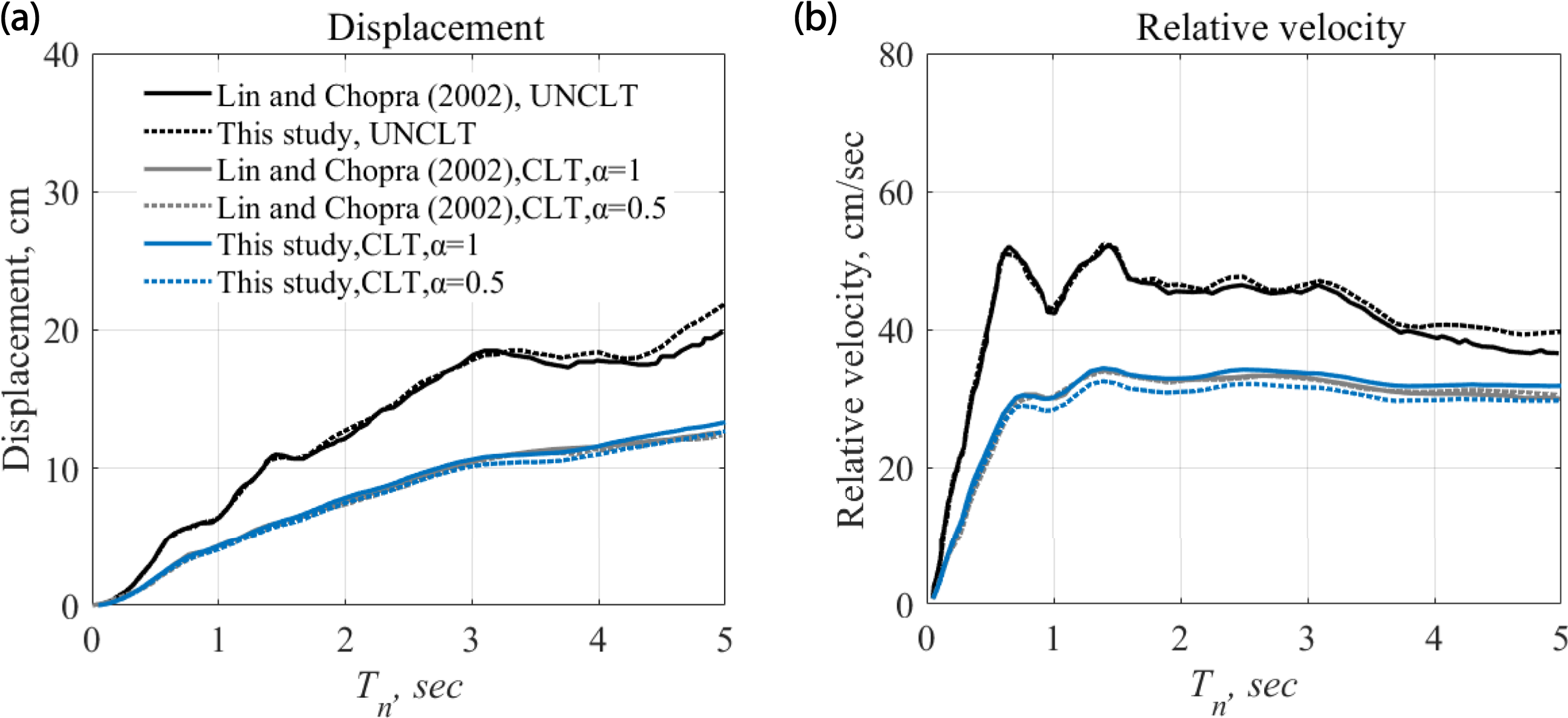
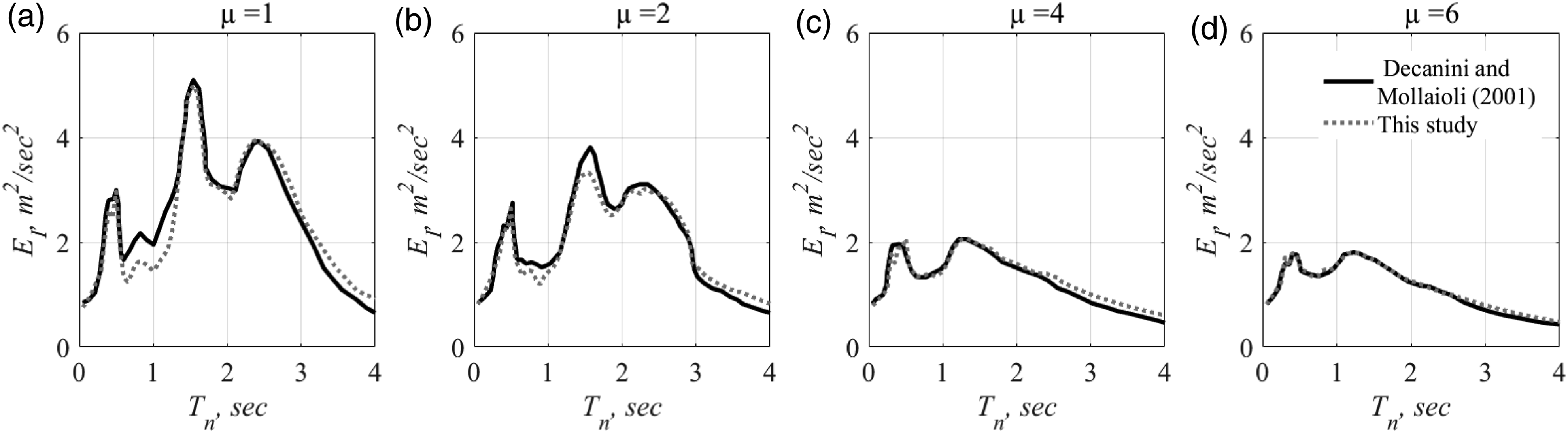
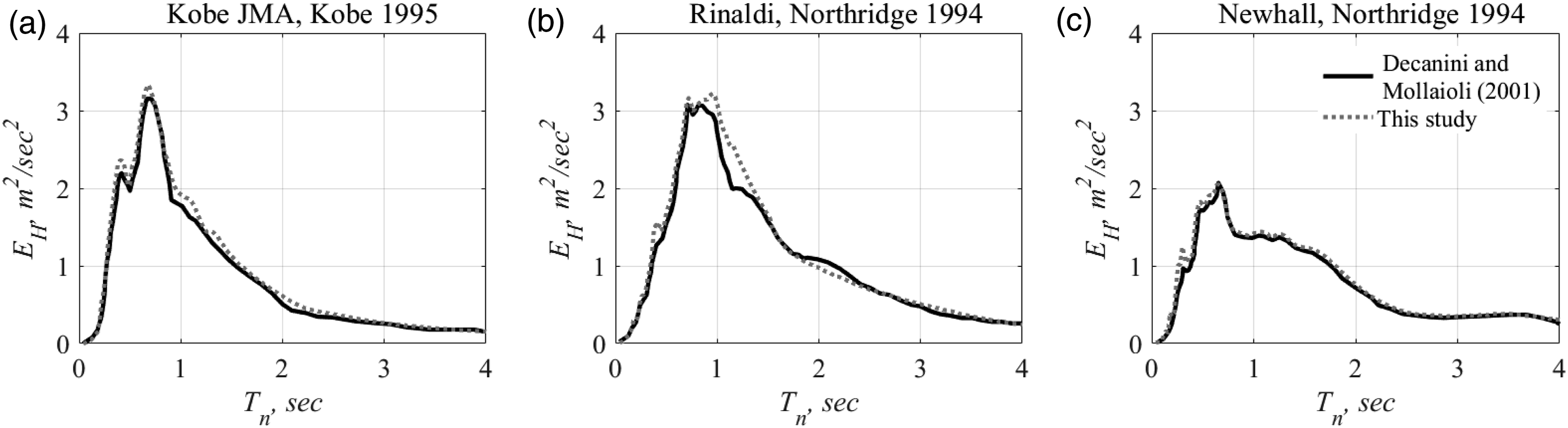
In this section, the developed algorithm was verified against prior studies to ensure that it is tracing the actual response closely to ensure the acceptability of the obtained results by the developed algorithm. In Figure 1, the displacement and relative velocity were verified for SDOF UNCLT and CLT systems using analysis given by Lin and Chopra (2002) under 20 ground motions; the system is elastic and the supplemental damping ratio is 15%. In Figure 2, the input energy demand spectra was verified for ductility levels ( = 1, 2, 4 and 6) using an analysis given by Decanini and Mollaioli (2001) in which 1994 Northridge Earthquake recorded at Sylmar Parking Lot, component 360° were used in the computations. In Figure 3, the hysteretic energy demand spectra was also verified for ductility level ( = 4) by using the analysis given by Decanini and Mollaioli (2001) under ground motion records: Newhall Kobe JMA, Kobe 1995; Rinaldi and Newhall, Northridge, 1994. Therefore, it is concluded that the developed algorithm gives a full agreement with prior studies in predicting structural response and energy terms.
Verification of displacement and relative velocity for SDOF elastic UNCLT and CLT systems.
Verification of mass-normalized input energy demand spectra calculations for SDOF inelastic systems with 5% viscous damping ratio and ( = 1, 2, 4, and 6).
Verification of mass-normalized hysteretic energy demand spectra calculations with 5% viscous damping ratio and = 4.
Ground motion selection
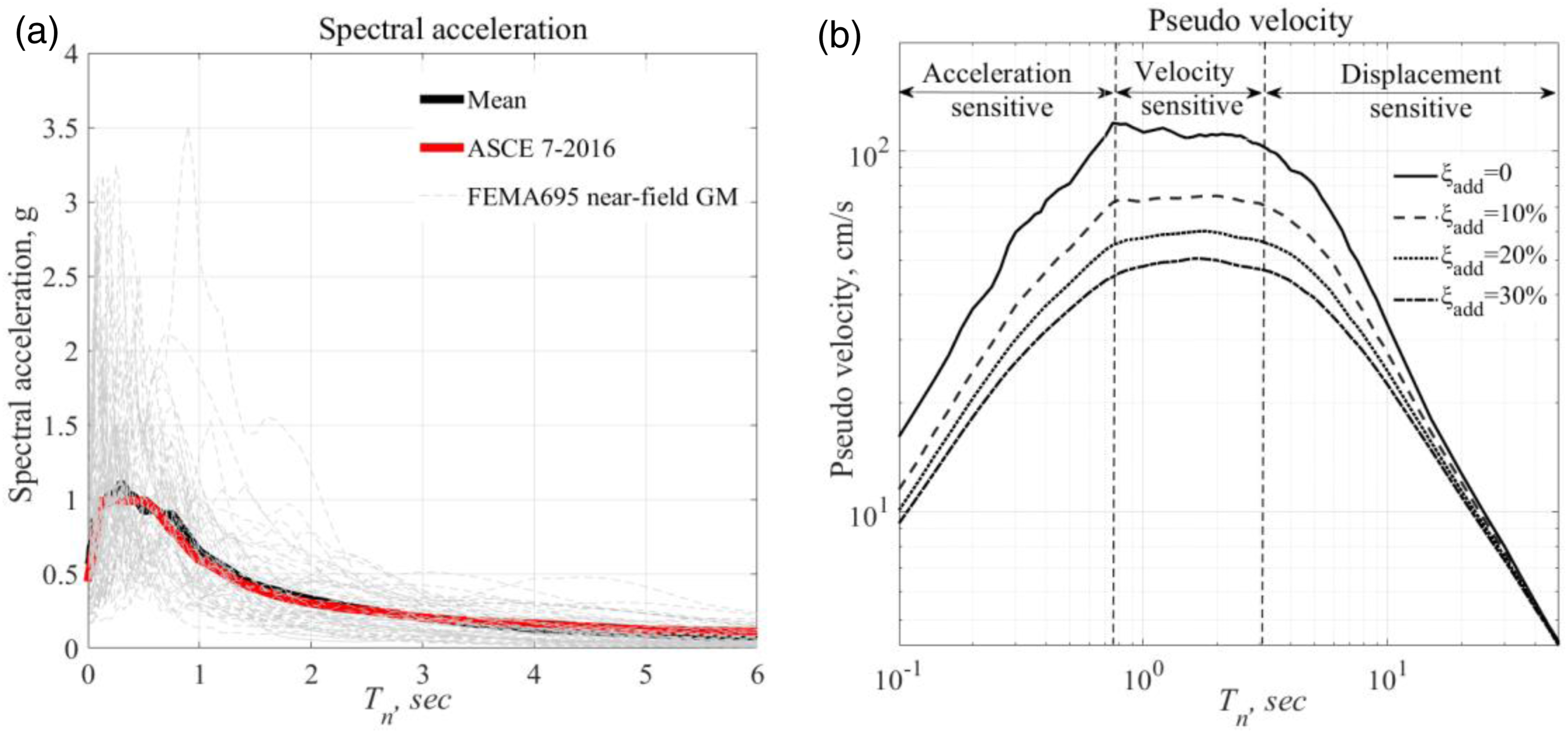
Most of the previous studies have focused on far-field records only or a collection of records for both far-field and near-field, excepting (Decanini and Mollaioli, 2001; Kalkan and Kunnath, 2007) showed the effect of near-field records clearly on the determination of the energy spectra for UNCLT systems. On the other hand, most of the structural damage caused by near-field records is a result of energy demand associated with pulse effects and few plastic cycles (Kalkan and Kunnath, 2006a). Therefore, this study is based on near-field records FEMA 695. The FEMA 695 near-field set includes twenty-eight records (56 individual components) selected from the PEER NGA database. These motions were recorded during seismic events with magnitudes ranging from 6.5 to 7.9 at distances ranging from 0.6 to 12 km and belonging to NEHRP site classification B, C and D. FEMA P695-June 2009 provides all information on these records. Shown in Figure 4(a) are the spectral acceleration response spectrum for each gund motion and the mean of the 56 response spectra as well as ASCE 7-2016 spectrum. The mean pseudo-velocity response spectrum for the ground motion ensemble at different linear is shown in Figure 4(b). Three spectral regions are identified as follows: the acceleration-sensitive region , the velocity-sensitive region , and the displacement-sensitive region .
(a) Individual response spectra for 56 ground motions and their mean response spectrum; (b) Mean pseudo-velocity response spectrum for 56 ground motions with spectral regions identified at different linear .
Results and observations
Single-degree-of-freedom structural response
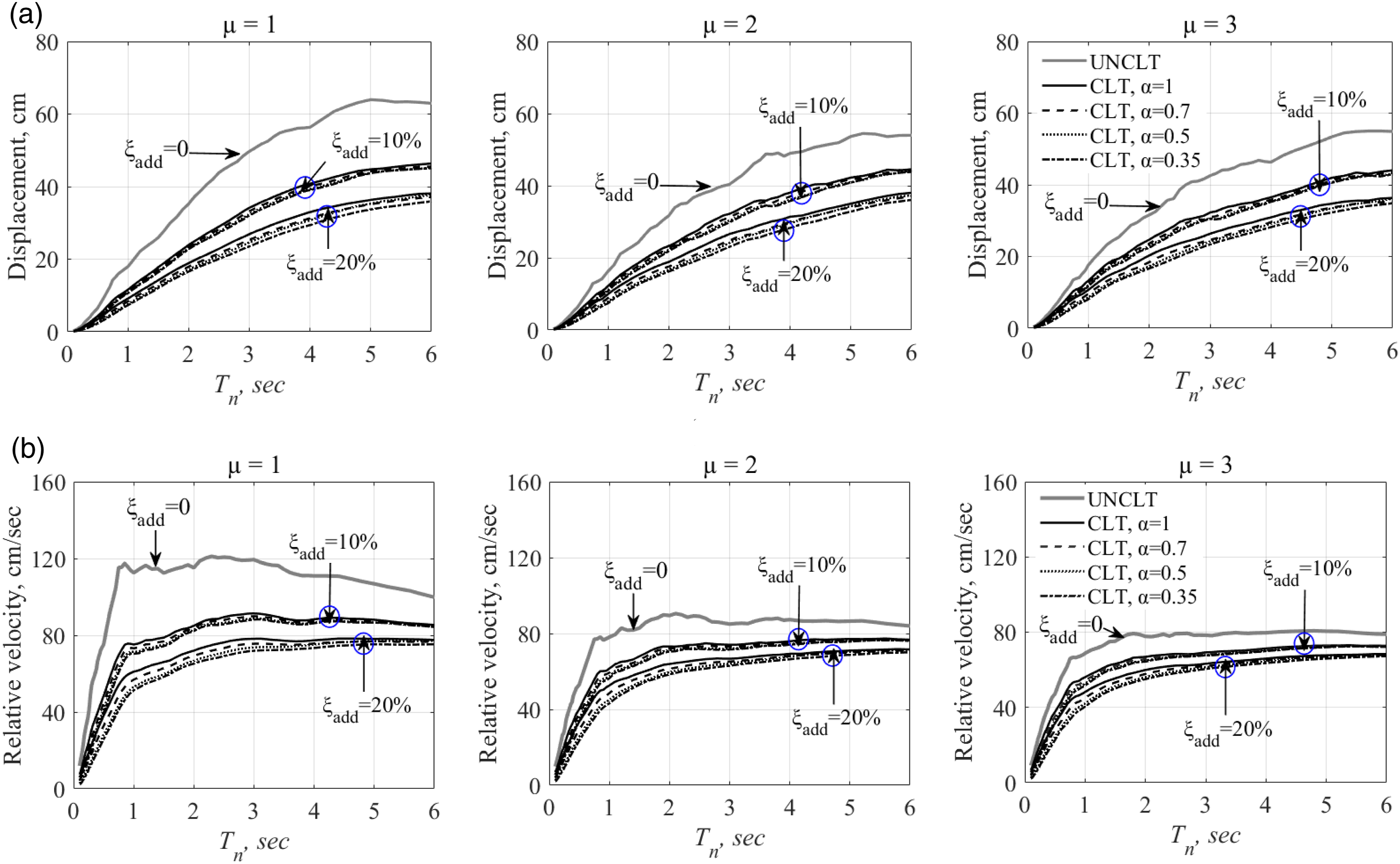
A comprehensive parametric study is conducted to evaluate the effects of and of FVD on SDOF structural responses (relative displacement, and relative velocity) with varying . It is seen that the structural relative displacement and relative velocity responses are both then reduced if is added for structural systems (Figure 5(a) and (b)). The displacement and velocity responses are always reduced when is increased at different ( = 1, 2 and 3) and (α = 1, 0.7, 0.5 and 0.35) over the range of periods considered. It is evident from Figure 5(a) and (b), the effect of on displacement and velocity responses decreases slightly with increasing µ compared to an elastic structure. Consistent with observations in Figure 5(a) and (b), the reduction in responses is slightly affected by FVD nonlinearity α along periods of interest.
Mean response spectra for UNCLT and CLT systems: (a) displacement, and (b) relative velocity.
Response history for (a) , (b) , and (c) for SDOF inelastic system ( = 1sec, = 2, and = 3%) for different FVD nonlinearity values of , .
Single-degree-of-freedom energy time history
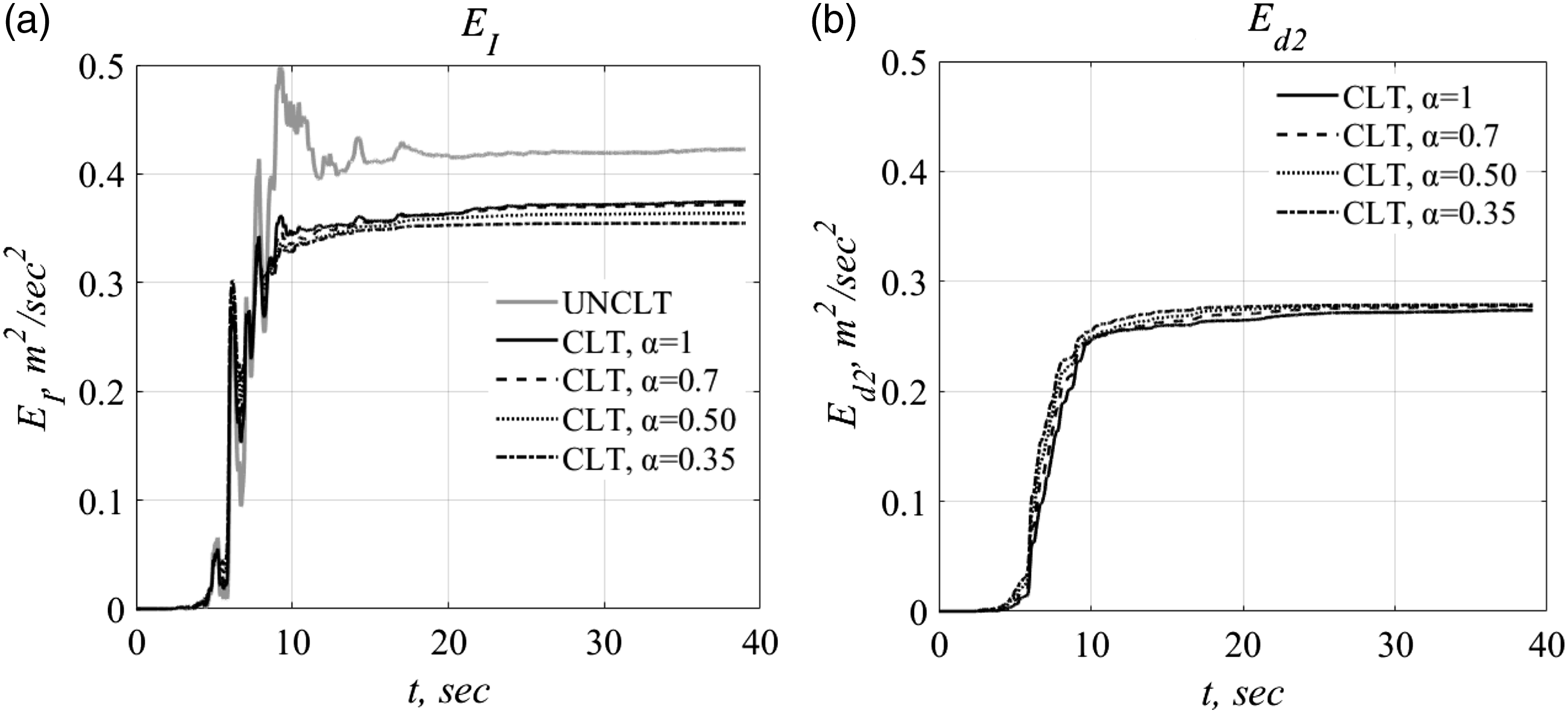
Figure 6 shows the and response for SDOF UNCLT and CLT system with equal = 10%, but different values of for SDOF elastic system ( = 1sec and inherent damping = 3%) subjected to FEMA 695 near-field ground motion (Imperial Valley-06, El Centro Array #6, fault parallel component). FVD nonlinearity, characterized by the parameter , has a large influence on the response, while the effect of the parameter on the is not significant for SDOF elastic CLT system.
Response history for (a) , and (d) for SDOF elastic system ( = 1sec and inherent damping = 3%) for different FVD nonlinearity values of , .
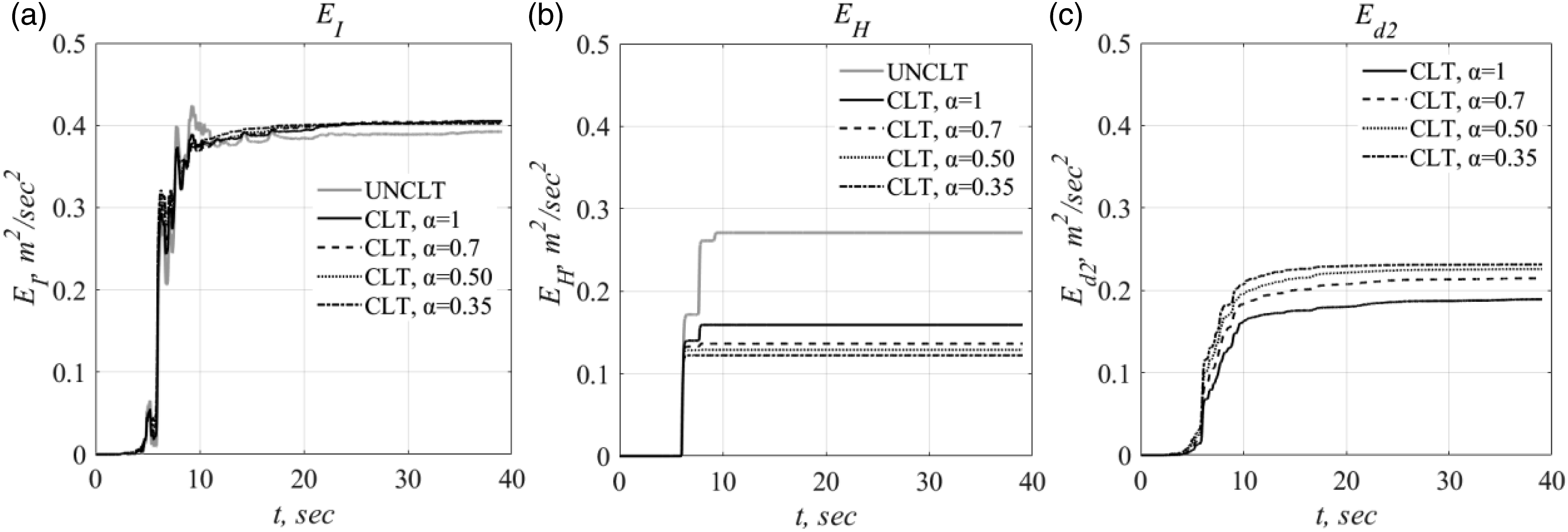
Similarly, Figure 7 shows the and as well as response with equal = 10%, but different values of for SDOF inelastic system ( = 1sec, ductility level = 2, and = 3%). The energy response for and as well as are presented in Figure 7(a)–(c), respectively, which are affected significantly by FVD nonlinearity, the influence increases with decreasing , implying more nonlinearity of FVD. The reduction in the and increase in as a result of FVD nonlinearity essentially depend on . Nonlinear FVDs are more beneficial and practical in buildings because they have a higher amount of energy dissipation than the linear FVD (Figure 7(b) and (c)). This result showed an agreement with Constantinou and Symans (1992), they compared energy-dissipation capacity for different FVDs based on experimental test and numerical studies, and found that a nonlinear FVD has more energy dissipation than a linear one.
Single-degree-of-freedom energy spectra
This section describes analytical studies performed supporting the development of the energy spectra for SDOF UNCLT and CLT systems. Nonlinear time history analyses NTHA subjected to the pertinent set of 28-near field GMs (56 records in total) are performed using MATLAB 2019a release. These results are evaluated to determine: (1) the input energy spectra , and (2) hysteretic energy spectra in the presence of linear and nonlinear FVD. Both energies data are of direct interest because some design codes and guidelines are going to specify the damage that occurred in structural systems based on energy spectral quantities. This part focuses on the effect of µ of structural systems and FVD characteristics ( and α) on energy spectra.
Input energy
Input energy is defined as the work done by the equivalent force (mass multiplied by the earthquake ground acceleration) on the equivalent fixed-base system. The effect of rigid body translation of the structure is neglected.
Effect of ductility level of structural system
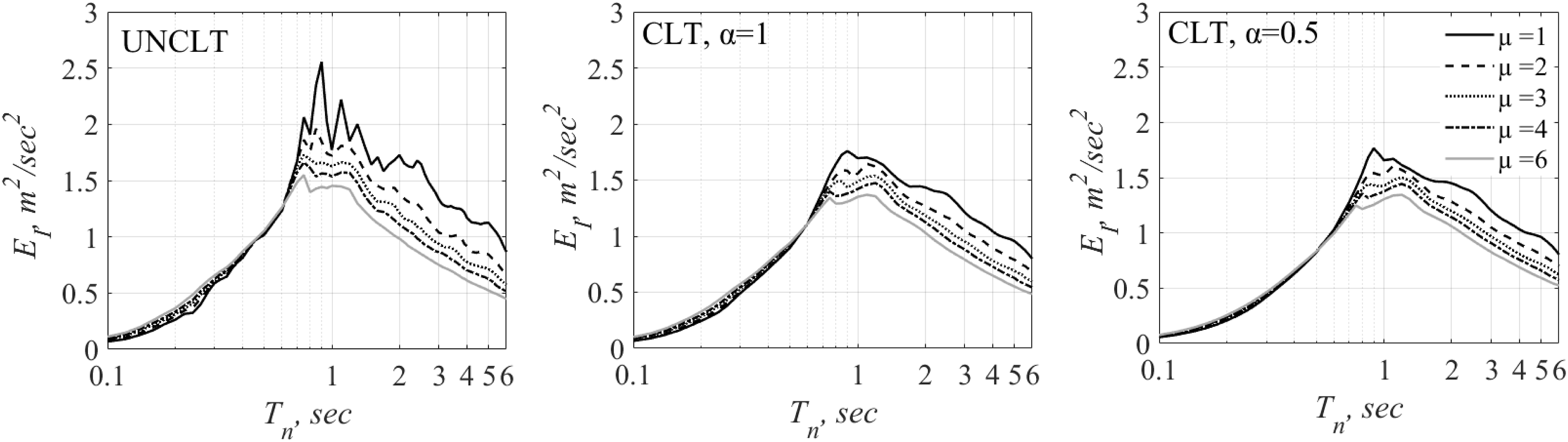
Figure 8 shows the effect of ductility level (µ = 1, 2, 3, 4, and 6) on the spectra for SDOF UNCLT and CLT systems. Two FVDs with velocity power (α = 1 and 0.5) are considered at . In the velocity and displacement-sensitive regions, the decreases with increasing µ. On the other hand, in the acceleration-sensitive region, the corresponding curves are close to each other, indicating that the is not affected by increasing µ. The effect of µ is more pronounced for SDOF UNCLT and CLT systems dominated by the velocity and displacement-sensitive regions.
Effect of ductility levels (µ = 1, 2, 3, 4 and 6) on the for SDOF UNCLT and CLT systems.
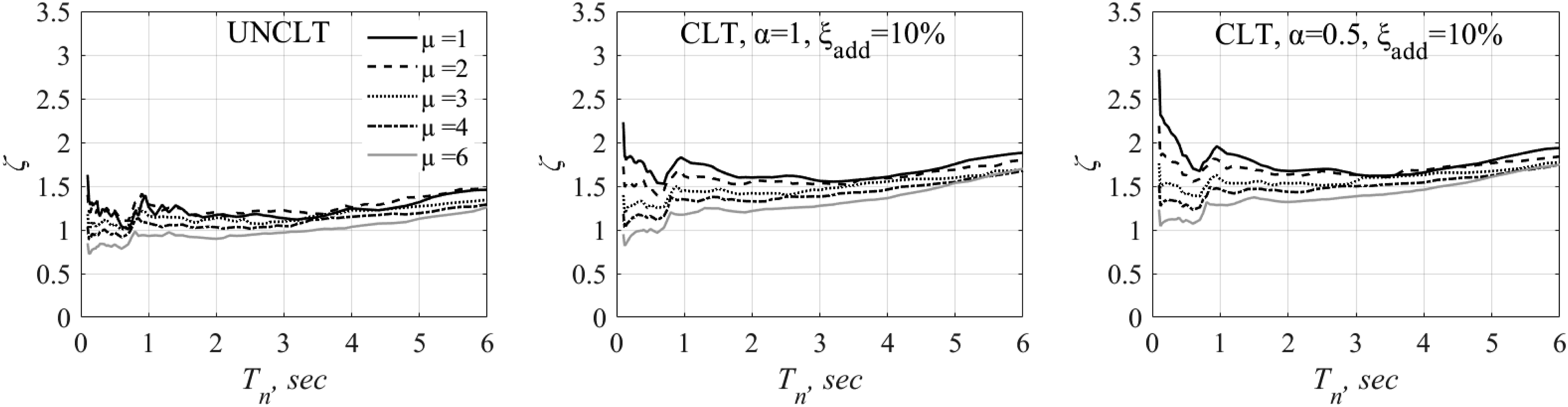
Effect of supplemental damping ratio of fluid viscous dampers
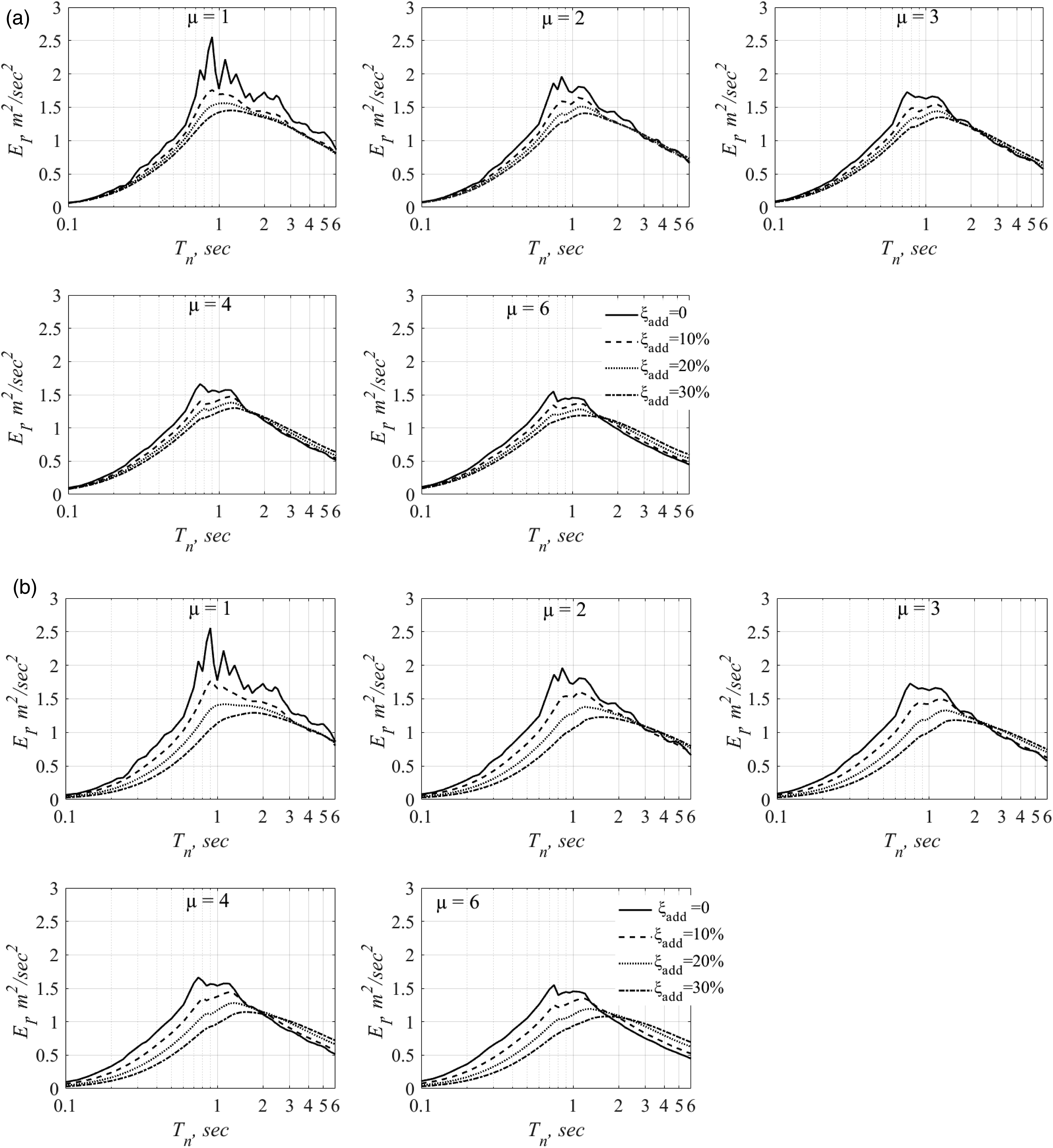
Figure 9 shows the effect of of FVD on the spectra of SDOF CLT systems with varying (µ = 1, 2, 3, 4, and 6) and (α = 1 and 0.5). As shown for µ = 1, the shape of the spectra decrease with increasing even by 10% along all-natural vibration periods for linear and nonlinear FVD (Figure 9(a)–(b)). While for higher , the effect is more obvious on until almost for linear and nonlinear FVD, respectively. For µ = 2 and 3, the effect of is more effective even for for linear and nonlinear FVD, respectively, because the response is attributed to be more inelastic. While for , the effect of is smaller, particularly for long-period systems (Figure 9(a)–(b)). For µ = 4 and 6, the effect of leads to increase the compared to UNCLT systems, especially for long-period systems.
(a) Effect of of FVD with fixed on the for SDOF UNCLT and CLT systems with varying (µ = 1, 2, 3,4 and 6); (b)Effect of of FVD with fixed on the for SDOF UNCLT and CLT systems with varying (µ = 1, 2, 3, 4 and 6).
Effect of velocity power of fluid viscous dampers
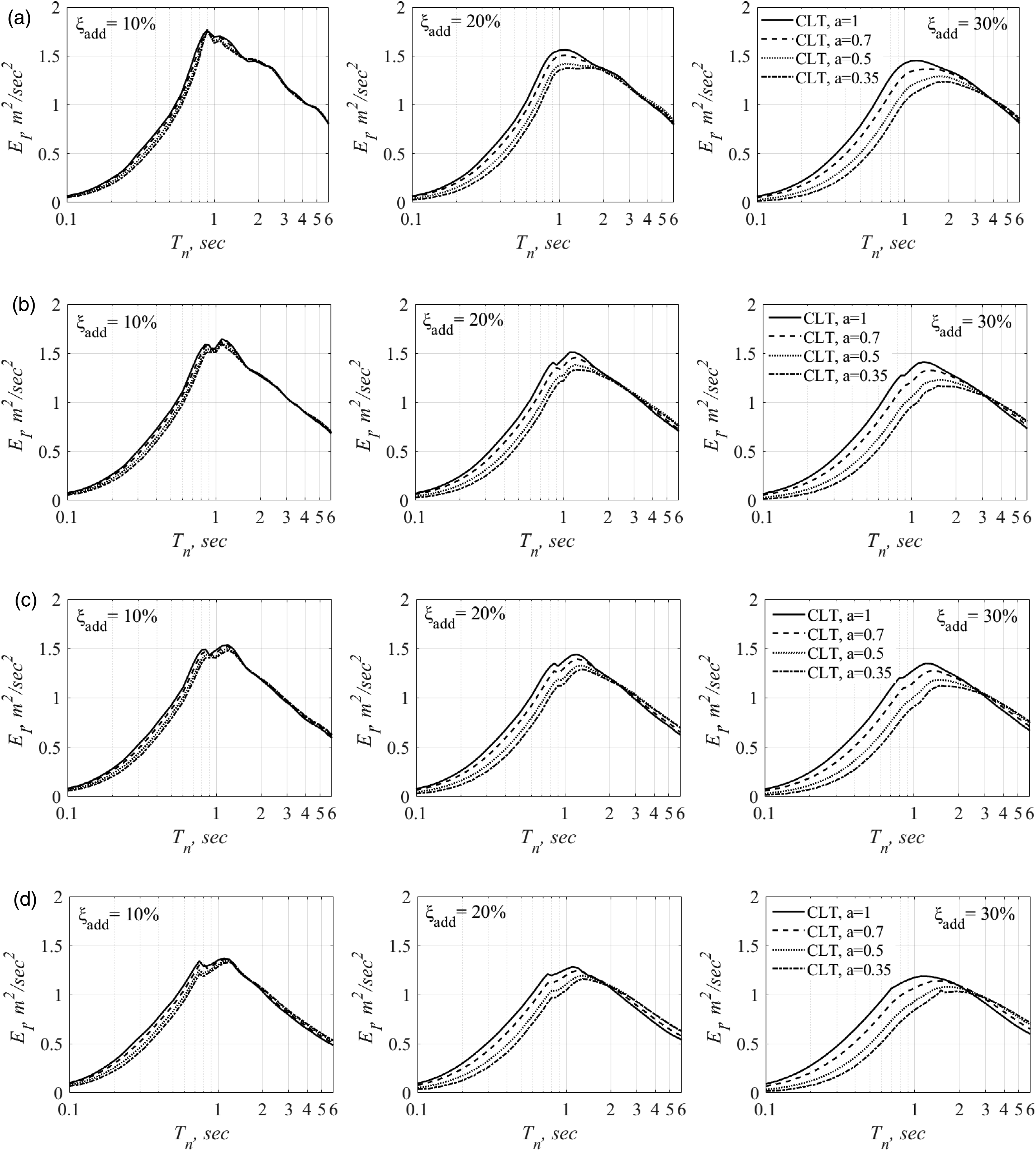
Figure 10 depicts the influence of velocity power of FVD ( = 1,0.7,0.5, and 0.35) on the spectra for SDOF CLT systems with various ( = 10%, 20%, and 30%) and (µ = 1, 2, 4, and 6). The spectra for systems with , have the same values along all for various µ and . The results for fixed µ and higher permit the following observations on how the degree of FVD nonlinearity indicated by α influence the relationship between and in the various spectral regions (Figure 10). In the acceleration-sensitive region, the spectra decrease with decreasing , indicating that FVD has a large effect. In the velocity–sensitive region, the effect of α is decreased by increasing and dependent on . In the displacement-sensitive region, the decrease of α leads to increase spectra compared with linear one (α = 1) especially for . Observations synthesized from Figure 10 indicate that the reduction in the spectra caused by a decrease in depends on the amount of and .
Effect of () on the for SDOF CLT systems with varying for: (a) µ = 1; (b) µ = 2; (c) µ = 4; (d) µ = 6.
Hysteretic energy
The energy dissipated through inelastic displacements could be determined by calculating the area of the enclosed loop of the force-displacement relationship. Analytically, the could also be calculated by subtracting the kinetic, damping and elastic energies from the input energy. This section leads to the definition of the amount of inelastic deformation expressed as the maximum value of through hysteresis loops for UNCLT and CLT SDOF systems.
Effect of ductility level of structural system
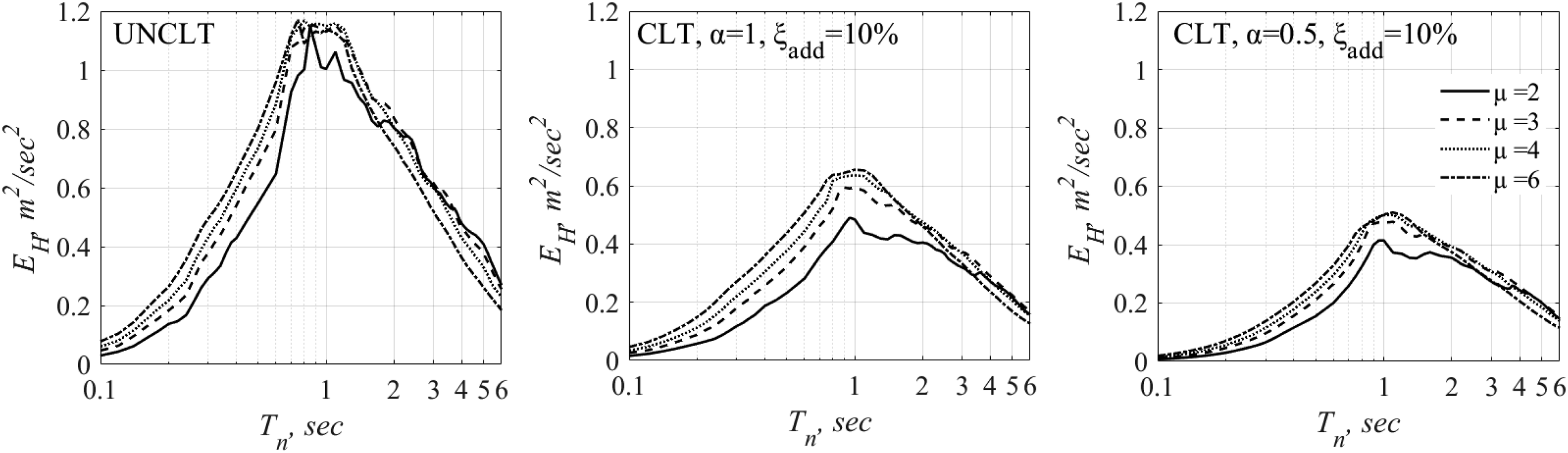
The influence of ductility level (µ = 2, 3, 4, and 6) on the spectra for SDOF UNCLT and CLT systems is shown in Figure 11. For fixed and , the influence of µ on the is significant for systems with , even for µ = 3, because of higher inelastic action, while for systems with , the spectra are unaffected by µ. According to Figure 11, µ >3 does not significantly change the spectra.
Effect of ductility levels (µ = 2, 3, 4 and 6) on the for SDOF UNCLT and CLT systems.
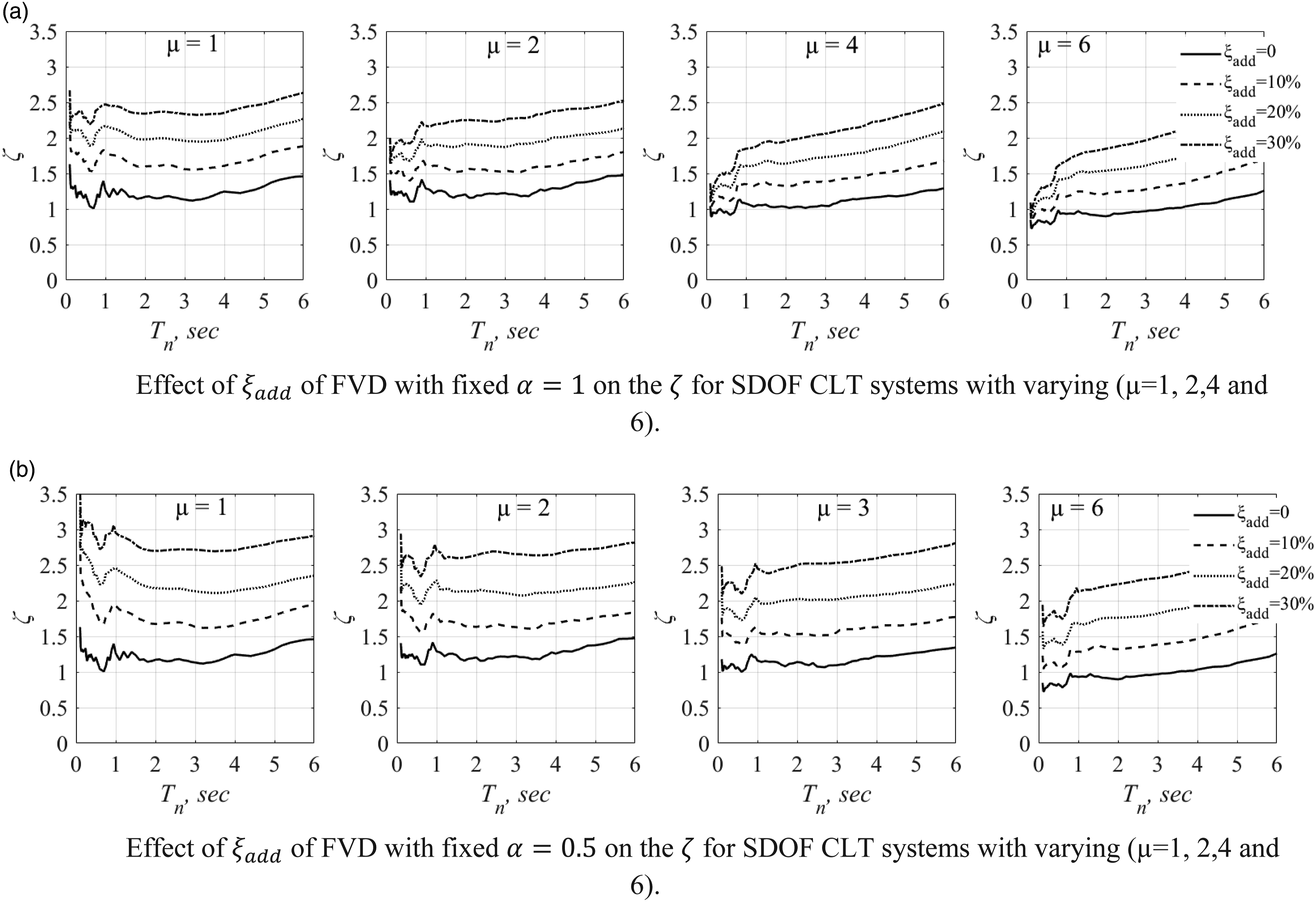
Effect of supplemental damping ratio of fluid viscous dampers
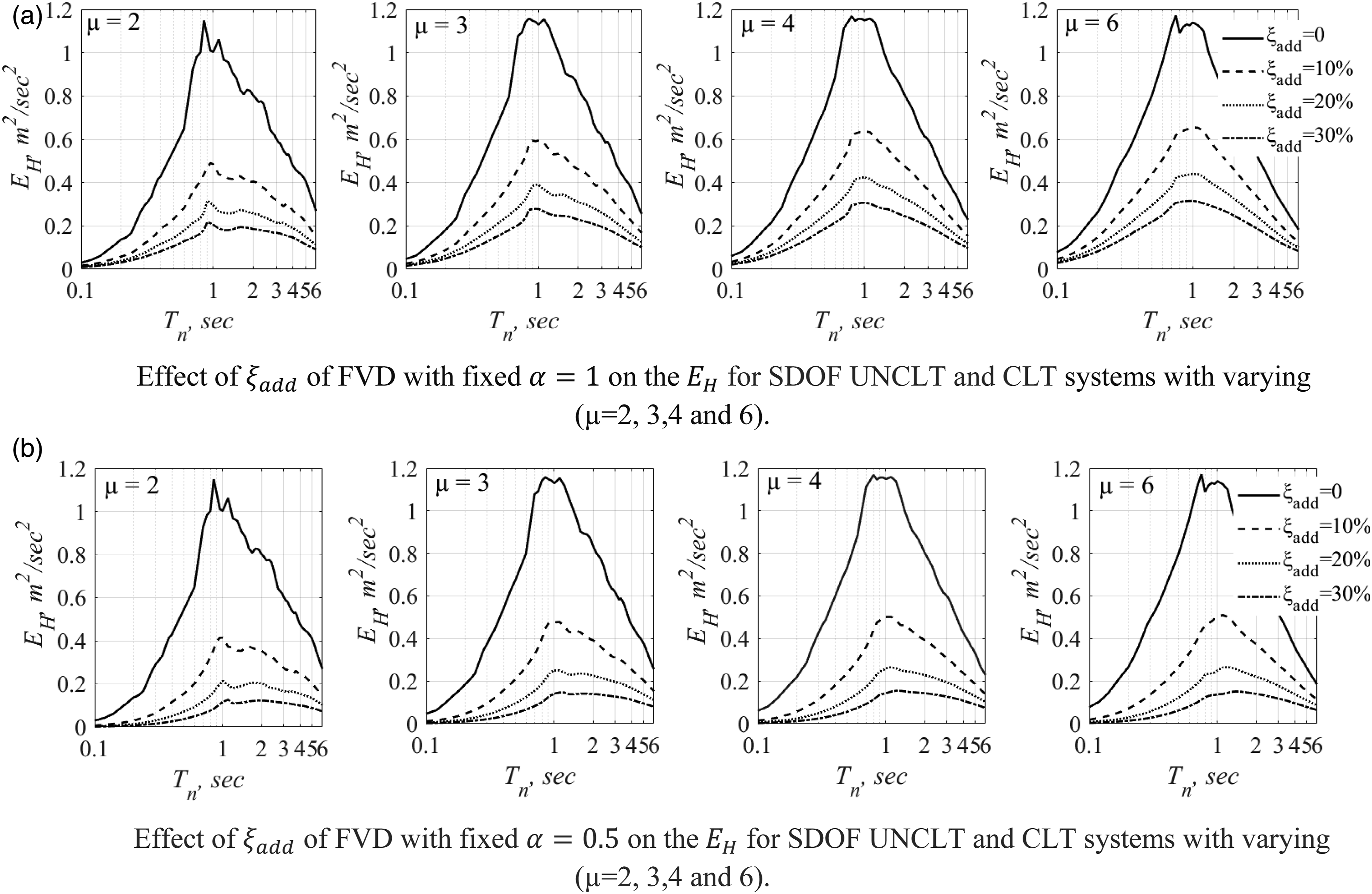
One of the most significant factors determining the spectra is the . The impact of on the spectra with varying ductility levels ( = 2, 3, 4, and 6) and fixed (α = 1 and 0.5) is shown in Figure 12. The results demonstrate that increasing considerably reduces spectra over the entire period range. It is noted that the effect of is less significant for >20%.
(a). Effect of of FVD with fixed on the for SDOF UNCLT and CLT systems with varying (µ = 2, 3,4 and 6); (b) Effect of of FVD with fixed on the for SDOF UNCLT and CLT systems with varying (µ = 2, 3,4 and 6).
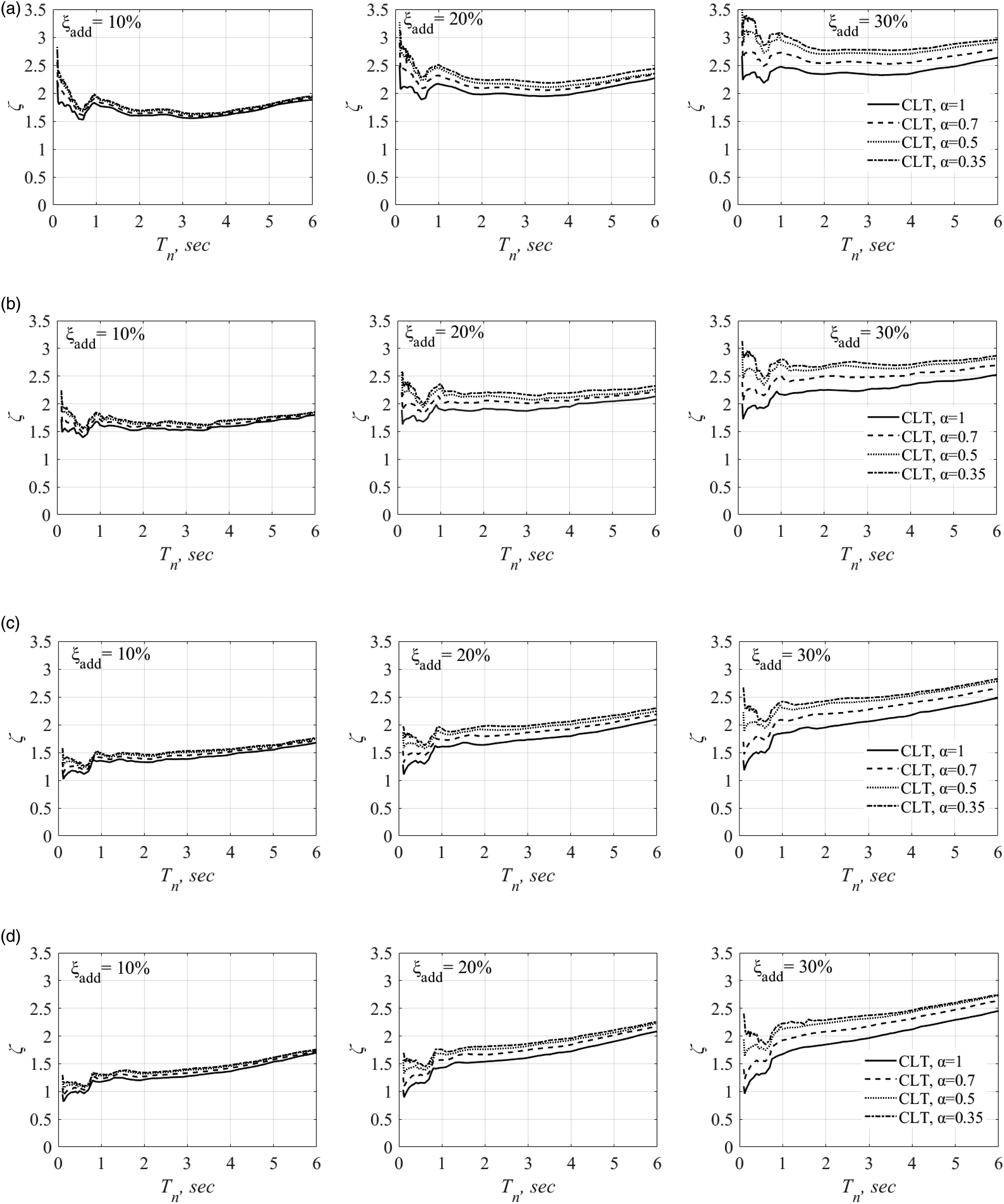
Effect of velocity power of fluid viscous dampers
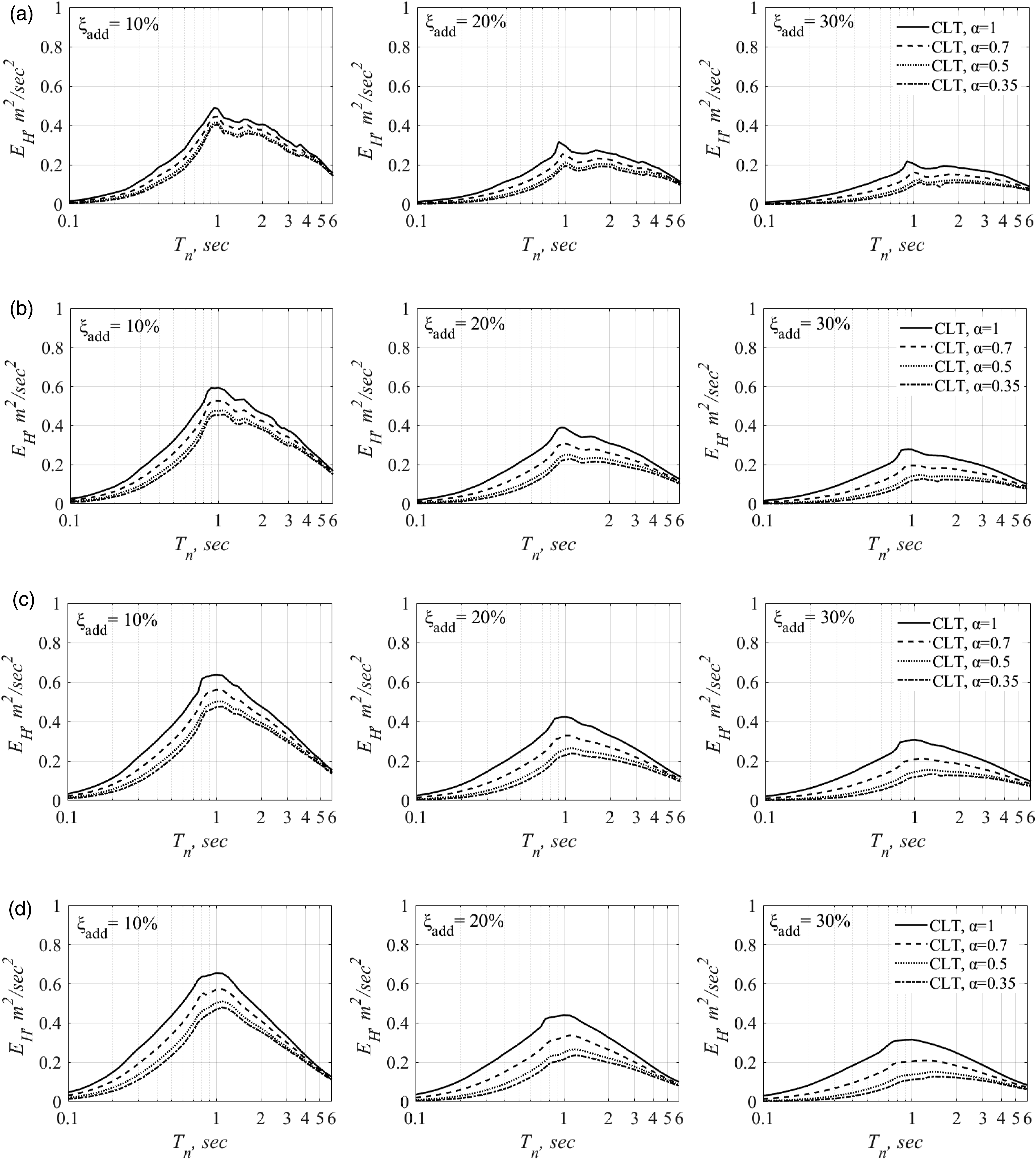
Figure 13 shows the effect of velocity power of FVD on the spectra for SDOF CLT systems for different levels of and (µ = 2, 3, 4 and 6). Figure 13 permits the following observations on how the degree of FVD nonlinearity indicated by α influences the relationship between and in the various spectral regions. Observations synthesized from Figure 13 indicate that the reduction of leads to a decrease of the spectra; however, this impact disappears when α<0.5. In addition, the reduction increases with increasing µ and . For different values of , it can be said that generally varies with the same µ and in the following order: α = 1> α = 0.7> α = 0.5 = 0.35. Consistent with earlier observations, the reduction in the responses are essentially affected by FVD non-linearity in all-natural vibration period. This can be attributed to the nonlinearity FVD acquired during the analyses is more significant to compute the demand for SDOF systems equipped with FVD.
Effect of on the for SDOF CLT systems with varying for: (a) µ = 2; (b) µ = 3; (c) µ = 4; (d) µ = 6.
Single-degree-of-freedom energy indices
The energy indices are a new measure that is defined as the peak-to-peak energy demand to maximum structural displacement. This concept has been used extensively to define reliable relationships between seismic energy and displacement, thus developing indices to capture the damage potential of earthquake shaking. The following non-dimensional parameter based on the reduction of deformation capacity has been proposed by the first author (Fajfar and Vidic, 1994b), expressed as
where represents the hysteretic energy; is the mass of the system; is the natural frequency; and is the maximum displacement demand. The parameter controls the reduction of the displacement ductility due to low-cycle fatigue. This index, which is a ratio of two velocities, is shown to be dependent on both ground motion and system characteristics, but independent of the supplemental damping ratio (Fajfar and Vidic, 1994b).
Similar parameter was proposed later by Teran-Gilmore (1998) where the term of is in equation (5) has been replaced by the term absolute and shown to be more stable than as follows
The evaluation of non-dimensional energy parameters ( and ) for SDOF UNCLT and CLT systems are based on different ductility levels (µ = 1, 2, 3, 4, and 6), different values of velocity power (α = 1, 0.7, 0.5 and 0.35) and different values of supplemental damping ratio .
Relationship between hysteretic energy and structural displacement
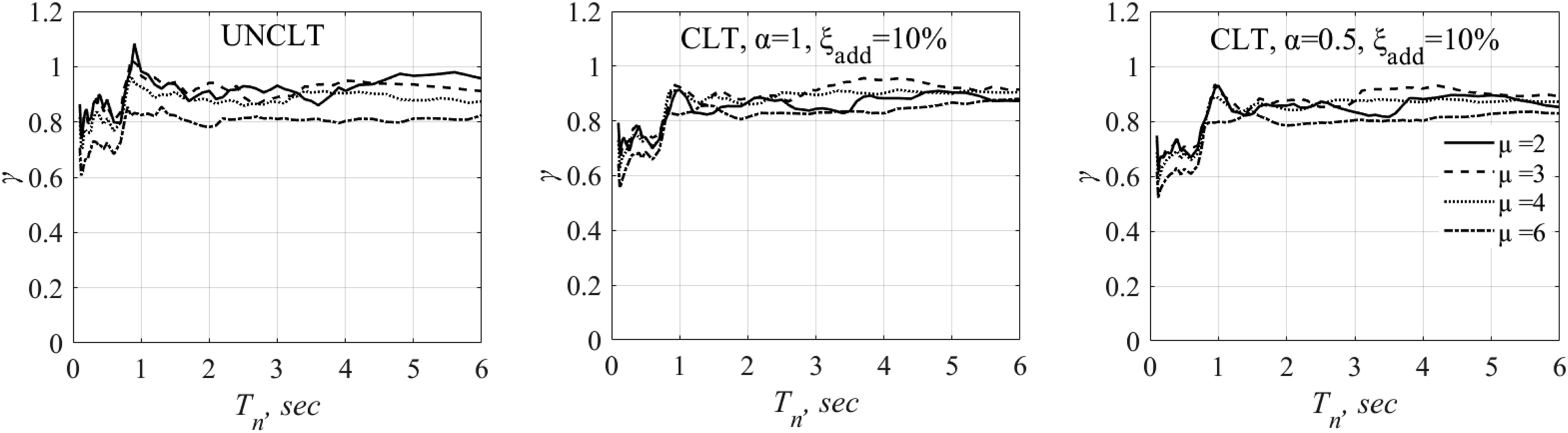
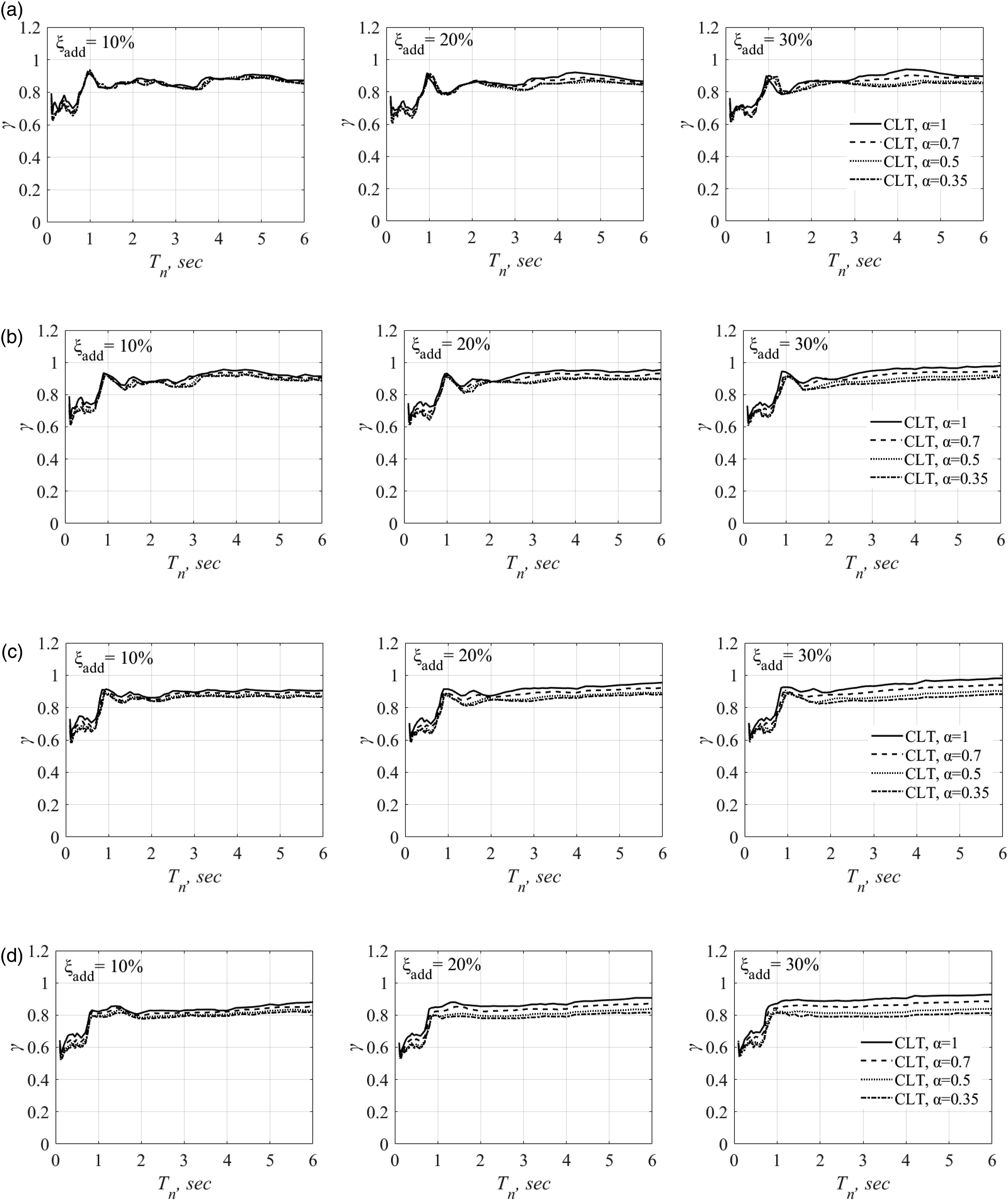
Figure 14 shows the effect of ( = 2, 3, 4 and 6) on the parameter for SDOF UNCLT and CLT systems. The parameters are almost identical with slight differences when the ductility level is increased even for µ = 4, while for higher = 6, the parameter is decreased a little for some portions of . It can be seen that the parameter is practically independent on the mathematical modeling of the , except of structures controlled by acceleration-sensitive region at different levels of µ (Figure 15). Figure 16 shows the effect of () on the parameter for SDOF CLT systems for different levels of and ( = 2, 3, 4 and 6). It is noted that the reduction of slightly decreases the for some portions of (Figure 16).
Effect of ductility levels (µ = 2, 3, 4 and 6) on the γ for SDOF UNCLT and CLT systems.
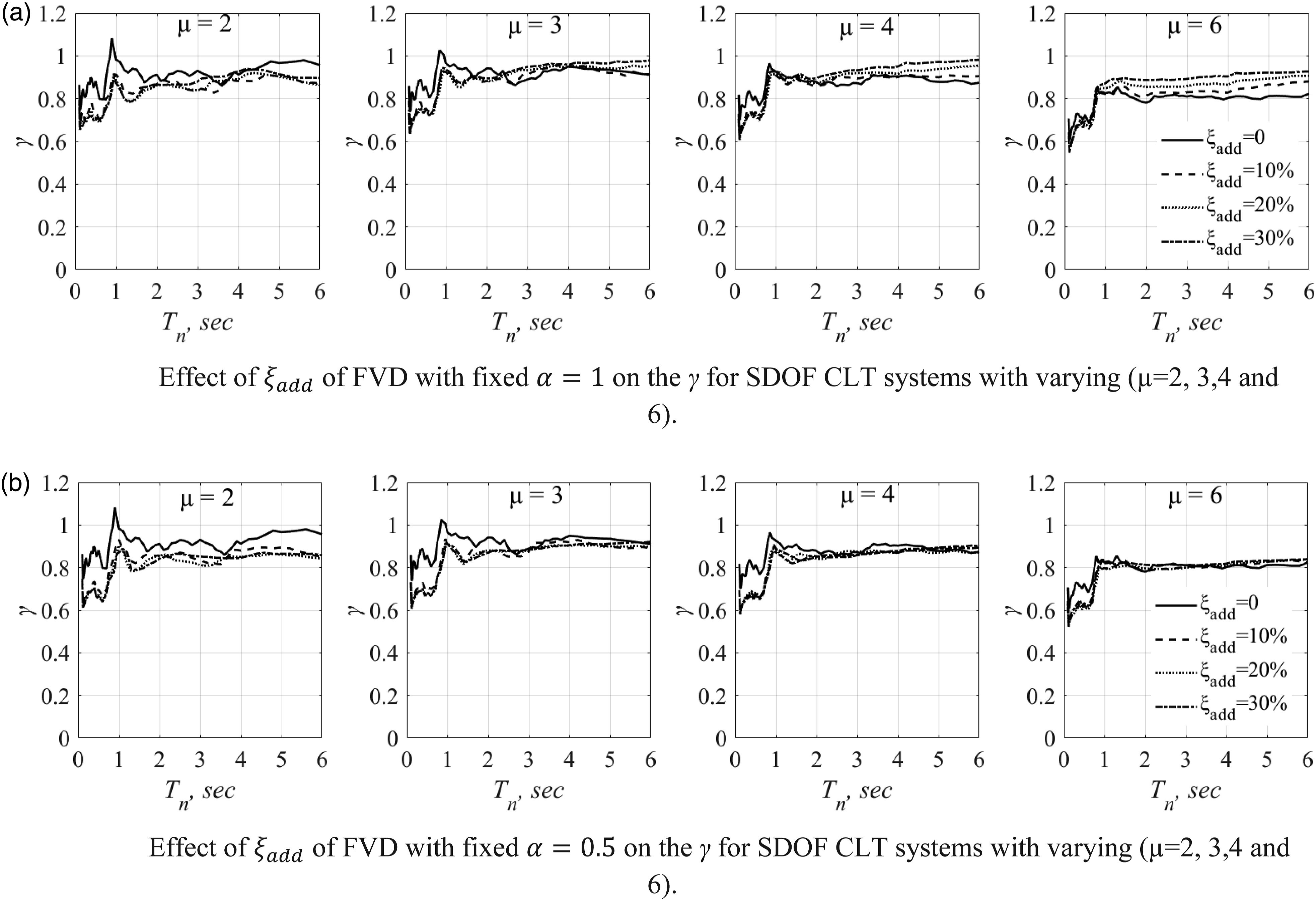
(a) Effect of of FVD with fixed on the γ for SDOF CLT systems with varying (µ = 2, 3,4 and 6); (b) Effect of of FVD with fixed on the γ for SDOF CLT systems with varying (µ = 2, 3,4 and 6).
Effect of on the γ for SDOF CLT systems with varying for: (a) µ = 2; (b) µ = 3; (c) µ = 4; (d) µ = 6.
Relationship between input energy and structural displacement
Figure 17 shows the effect of ductility levels ( = 1, 2, 3, 4 and 6) on the parameter. It is observed that the parameter value relatively decreases with increasing at some parts of vibration periods for higher >3. However, an opposite trend can be observed that the value is almost identical for ( = 1 and 2). For fixed of the system and , the parameter increases with increasing along all vibration periods (Figure 18). Similarly, for fixed and , the parameter increases with decreasing along all vibration periods, particularly for higher (Figure 19). Finally, it is noted that the non-dimensional energy index yields more stable results than , because it is more affected by along all spectral regions. Hence, the dissipated through inelastic deformation and supplemental FVDs is a key parameter that is most strongly associated with the peak system deformation for near-field ground motions.
Effect of ductility levels (µ = 1, 2, 3, 4 and 6) on the for SDOF UNCLT and CLT systems.
(a) Effect of of FVD with fixed on the for SDOF CLT systems with varying (µ = 1, 2,4 and 6); (b) Effect of of FVD with fixed on the for SDOF CLT systems with varying (µ = 1, 2,4 and 6).
Effect of on the for SDOF CLT systems with varying for: (a) µ = 2; (b) µ = 3; (c) µ = 4; (d) µ = 6.
Conclusions
The fundamental principles and consequences of two energy measures (i.e. input and hysteretic energies) and non-dimensional energy indices for SDOF original systems (UNCLT) and those equipped with fluid viscous dampers (CLT) subjected to near-field ground motions were studied. The following main conclusions and results have been obtained:
1. The developed numerical model by MATLAB has given a good estimation for structural responses and energy terms with previous studies;
2. The incorporation of linear and nonlinear FVD besides the UNCLT system have a significant effect on the energy spectra and indices;
3. The ductility level (µ), supplemental damping ratio () and velocity power () of FVD have a great effect in the determination of input energy spectra (). The effect of µ is more obvious for structures dominated by the velocity and displacement-sensitive regions for UNCLT and CLT systems. The peak value of decreases when the increases, but this influence is less significant for systems with the displacement-sensitive region. On the other hand, distinctive has a significant impact on particularly for systems supplemented with higher , but this effect decreases with increasing natural vibration period. While for systems with lower , the effect of is less important;
4. The analyses showed the sensitivity of hysteretic spectra () to structural properties (µ and ) and FVD characteristics . The is not sensitive to higher µ>3 for both UNCLT and CLT systems. The increase of leads to a decrease in the over the whole period range. The systems incorporating with nonlinear FVD (α = 0.7, 0.5, and 0.35) generally experience lower mean than those of the linear FVD, because more earthquake energy is dissipated by the nonlinear FVDs compared to linear one;
5. The non-dimensional energy indices γ and are convenient parameters for expressing the relation of maximum displacement with and . The µ, and have a less influence in the determination parameter γ. In contrast, the is more affected by the µ, and ; and
6. The non- dimensional can be used to include deformation characteristics in seismic design procedures based on , as well as to assess, the damage potential of ground motions. Since is influenced by system deformation, µ, and ; the proposed spectra are more appropriate than the non- dimensional γ spectra for assessing the deformation demands of the structures.
Computation times
Computation times for of energy terms based on nonlinear time history analysis of the developed algorithm by MATALAB on a computer with a processor of Intel® Core™ i7-7700 CPU @4.9 GHz and an 32GB RAM were depended on the duration of ground motion time history, ductility level and also the nonlinearity of FVD.
Footnotes
Authors Contributions
Ying Zhou: Idea, Conceptualization, Supervision. Ge Song: Review, Editing. Mohammed Samier Sebaq: Data curation, Writing, preparation, Investigation, Programming, Validation, Methodology.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (Grant No. 52025083) and Shanghai Science and Technology Committee (Grant No. 19DZ1201200).
ASCE 7-16 (2016) Minimum Design Loads for Buildings and Other Structures. Reston, VA: American Society of Civil Engineers.
5.
Benavent-ClimentALopez-AlmansaFBravo-GonzalezDA (2010) Design energy input spectra for moderate to-high seismicity regions based on Colombian earthquakes. Soil Dynamics and Earthquake Engineering30(11): 1129–1148.
6.
BerteroVVUangCM (1988). Implications of recorded earthquake ground motions on seismic design of building structures. Research Report, UCB/EERC-88/13. Los Angeles, CA: University of California at Berkeley.
7.
BlackCMakrisN (2007) Viscous heating of fluid dampers under small and large amplitude motions: experimental studies and parametric modeling. Journal of Engineering Mechanics133(5): 566–577.
8.
BruneauMWangN (1996) Some aspects of energy methods for the inelastic seismic response of ductile SDOF structures. Engineering Structures18(1): 1–12.
9.
ChaiYHFajfarP (2000) A procedure for estimating input energy spectra for seismic design. Journal of Earthquake Engineering4(4): 539–561.
10.
ChalarcaBFiliatraultAPerroneD (2020) Seismic demand on acceleration-sensitive nonstructural components in viscously damped braced frames. Journal of Structural Engineering, ASCE146(9): 04020190.
11.
ChopraAK (2006) Dynamics of Structures: Theory and Applications to Earthquake Engineering. 3rd edition. Englewood Cliffs, NJ: Prentice Hall.
12.
ChouCCUangCM (2000) Establishing absorbed energy spectra-an attenuation approach. Earthquake Engineering and Structural Dynamics29(10): 1441–1455.
13.
ChouCCUangCM (2003) A procedure for evaluation of seismic energy demand of framed structures. Earthquake Engineering and Structural Dynamics32: 229–244.
14.
ChristopoulosCFiliatraultA (2006) Principles of Supplemental Damping and Seismic Isolation. Pavia, Italy: IUSS Press, Istituto Universitario di Studi Superiori di Pavia.
15.
ConstantinouMCSoongTTDargushGF (1998) Passive Energy Dissipation Systems for Structural Design and Retrofit. Report No. 1. Buffalo, NY: Multidisciplinary Center for Earthquake Engineering Research.
16.
ConstantinouMCSymansMD (1992) Experimental and Analytical Investigation of Seismic Response of Structures with Supplemental Fluid Viscous Dampers. Report No. NCEER92-0032. Buffalo, NY: National Center for Earthquake Engineering Research.
17.
Dall’AstaAScozzeseFRagniL, et al. (2017) Effect of the damper property variability on the seismic reliability of linear systems equipped with viscous dampers. Bulletin of Earthquake Engineering15(11): 5025–5053.
18.
Dall’AstaATubaldiERagniL (2016) Influence of the nonlinear behavior of viscous dampers on the seismic demand hazard of building frames dampers. Earthquake Engineering and Structural Dynamics45(1): 149–169.
19.
DecaniniLDMollaioliF (1998) Formulation of elastic earthquake input energy spectra. Earthquake Engineering and Structural Dynamics27(12): 1503–1522.
20.
DecaniniLDMollaioliF (2001) An energy-based methodology for the assessment of seismic demand. Soil Dynamic and Earthquake Engineering21(2): 113–137.
21.
DindarAAYalcnCYukselE, et al. (2015) Development of earthquake energy demand spectra. Earthquake Spectra3(31): 1667–1689.
FajfarPKrawinklerH (1992) Nonlinear Seismic Analysis and Design of Reinforced Concrete Buildings. New York: Elsevier Applied Science.
24.
FajfarPVidicTFischingerM (1994a) Consistent inelastic design spectra: strength and displacement. Earthquake Engineering and Structural Dynamics23(5): 507–521.
25.
FajfarPVidicT (1994b) Consistent inelastic design spectra: hysteretic and input energy. Earthquake Engineering and Structural Dynamics23(5): 523–537.
26.
FEMA 356 (2000) Prestandard and Commentary for the Seismic Rehabilitation of Buildings. Washington, DC: American Society of Civil Engineers.
27.
FEMA P695 (2009) Quantification of Building Seismic Performance Factors. Washington, DC: American Society of Civil Engineers.
28.
GearGW (1971) Numerical Initial Value Problems in Ordinary Differential Equations. NJ: Prentice Hall.
29.
HousnerGW (1956). Limit design of structures to resist earthquakes, Proceedings of the first world conference on earthquake engineering, Berkeley, California, 1–13.
30.
KalkanEKunnathSK (2006a) Effects of fling-step and forward directivity on the seismic response of buildings. Earthquake Spectra22(2): 367–390.
31.
KalkanEKunnathSK (2007) Effective cyclic energy as a measure of seismic demand. Journal of Earthquake Engineering11(5): 725–751.
32.
KalkanEKunnathSK (2008) Relevance of absolute and relative energy content in seismic evaluation of structures. Advances in Structural Engineering11(1): 17–34.
33.
KazantziKAMirandaEVamvatsikosD (2020) Strength‐reduction factors for the design of light nonstructural elements in buildings. Earthquake Engineering and Structural Dynamics49: 1329–1343.
34.
KitayamaSConstantinouMC (2018) Seismic performance of buildings with viscous damping systems designed by the procedures of ASCE/SEI 7-16. Journal of Structural Engineering144(6): 04018050.
35.
KrawinklerH (1987) Performance assessment of steel components. Earthquake Spectra3(1): 27–41.
36.
KrawinklerHNassarA (1990) Damage potential of earthquake ground motions. Proceedings of the 4th U.S Conference on Earthquake Engineering, Palm Springs, California, EERI2: 945–954.
37.
KuwamuraHGalambosTV (1989) Earthquake load for structural reliability. Journal of Structural Engineering ASCE115(6): 1446–1462.
38.
LeelataviwatSGoelSCStojadinovicB (2002) Energy-based seismic design of structures using yield mechanism and target drift. Journal of Structural Engineering, ASCE28(8): 1046–1054.
39.
LinW-HChopraAK (2002) Earthquake response of elastic SDF systems with nonlinear fluid viscous dampers. Earthquake Engineering and Structural Dynamics31: 1623–1642.
40.
GaetanoM (2001) Evaluation of seismic energy demand. Earthquake Engineering and Structural Dynamics30(4): 485–499.
41.
Martinez-RodrigoMRomeroML (2003) An optimum retrofit strategy for moment resisting frames with nonlinear viscous dampers for seismic applications. Engineering Structures25(7): 913–925.
42.
McCabeSLHallWJ (1989) Assessment of seismic structural damage. Journal of Structural Engineering, ASCE115(9): 2166–2183.
43.
MinamiTOsawaY (1988) Elastic-plastic response spectra for different hysteretic rules. Earthquake Engineering and Structural Dynamics1616(4): 555–568.
44.
OrdazMHuertaBReinosoE (2002) Exact computation of input-energy spectra from Fourier amplitude spectra. Earthquake Engineering and Structural Dynamics32(4): 597–605.
45.
OtaniSYeL (1999) Maximum seismic displacement of inelastic systems based on energy concept. Earthquake Engineering and Structural Dynamics28(12): 1483–1499.
46.
PavlouEConstantinouMC (2006) Response of nonstructural components in structures with damping systems. Journal of Structural Engineering132(7): 1108–1117.
47.
RamirezOMConstantinouMCKircherCA, et al. (2001) Development and Evaluation of Simplified Procedures for Analysis and Design of Buildings with Passive Energy Dissipation Systems. Report No. MCEER-00-00102001. USA: University of Buffalo, Multidisciplinary Center for Earthquake Engineering Research.
48.
RasABoumechraN (2014) Study of nonlinear fluid viscous dampers behavior in seismic steel structures design. Arabian Journal for Science and Engineering39(12): 8635–8648.
49.
ReinhornAMLiCConstantinouMC (1995) Experimental and Analytical Investigation of Seismic Retrofit of Structures with Supplemental Damping: Part 1-fluid Viscous Damping Devices. Report No. NCEER 95-0001. Buffalo, NY: National Center for Earthquake Engineering Research, Univ. of New York at Buffalo.
50.
RiddellRGarciaEJ (2001) Hysteretic energy spectrum and damage control. Earthquake Engineering and Structural Dynamics30(12): 1791–1816.
51.
ShampineLFReicheltMW (1997) The MATLAB ODE Suite. SIAM Journal on Scientific Computing1818(1): 1–22.
52.
SoongTTDargushGF (1997) Passive Energy Dissipation Systems in Structural Engineering. New York: Wiley.
53.
SymansMCharneyFWhittakerA, et al. (2008) Energy dissipation systems for seismic applications: current practice and recent developments. Journal of Structural Engineering134(1): 3–21.
54.
TaylorDP (2015) History, Design and Applications of Fluid Dampers in Structural Engineering. North Tonawanda: Taylor Devices, Inc. Retrieved Dec. 3.
55.
TaylorDP (2016) Structural Applications of Taylor Fluid Viscous Dampers. North Tonawanda: Taylor Devices, Inc. Retrieved Jan. 3.
56.
TembulkarJMNauJM (1987) Inelastic modeling and seismic energy dissipation. Journal of Structural Engineering, ASCE113(6): 1373–1377.
57.
Teran-GilmoreA (1998) A parametric approach to performance-based numerical seismic design. Earthquake Spectra14(3): 501–520.
58.
The Mathworks, Inc (2019) MATLAB 2019a.
59.
TubaldiERagniLDall’AstaA (2015) Probabilistic seismic response assessment of linear systems equipped with nonlinear viscous dampers. Earthquake Engineering and Structural Dynamics44(1): 101–120.
60.
UangCMBerteroVV (1990) Evaluation of seismic energy in structures. Earthquake Engineering and Structural Dynamics19(1): 77–90.
61.
WongKF (2004) Inelastic seismic response analysis based on energy density spectra. Journal of Earthquake Engineering8(2): 315–334.
62.
WongKFYangR (2002) Earthquake response and energy evaluation of inelastic structures. Journal of Engineering Mechanics128(3): 308–317.
63.
ZahrahTFHallWJ (1984) Earthquake energy absorption in SDOF Structures. Journal of Structural Engineering110(8): 1757–1772.
64.
ZhouYSongGHuangS, et al. (2019) Input energy spectra for self-centering SDOF systems. Soil Dynamics and Earthquake Engineering121: 293–305.